

Параллельная работа синхронных генераторов
Категория:
Передвижные электростанции
Публикация:
Параллельная работа синхронных генераторов
Читать далее:
Устройство карбюраторных двигателей
Параллельная работа синхронных генераторов
Параллельным называется такое присоединение генераторов, при котором их обмотки подключены к общим шинам одноименными зажимами.
Параллельно работающие генераторы должны отдавать в сеть ток одинаковой частоты, и поэтому генераторы с одинаковым числом пар полюсов должны вращаться со строго одинаковой скоростью. При параллельной работе нескольких генераторов с разным числом пар полюсов скорости их вращения должны быть обратно пропорциональны числам пар полюсов, а частота тока, вырабатываемого генераторами, — одинаковой.
Включение синхронных генераторов на параллельную работу чаще всего бывает вызвано необходимостью создания мощных источников питания для обеспечения надежного и бесперебойного снабжения потребителей электрической энергией. Вместе с тем параллельная работа нескольких генераторов на общую сеть позволяет полнее использовать их мощность, а также создает возможность вывода в ремонт любого из работающих генераторов.
Вместе с тем параллельная работа нескольких генераторов на общую сеть позволяет полнее использовать их мощность, а также создает возможность вывода в ремонт любого из работающих генераторов.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 1. Кривые зависимости тока возбуждения от нагрузки синхронного генератора
Схема подключения синхронного генератора к электрической сети на параллельную работу с другими генераторами показана на рис. 2.
Рассмотрим кратко условия и процесс подключения синхронного генератора к сети на параллельную работу.
Включая генератор для параллельной работы с другими генераторами, необходимо принять меры, исключающие возможность возникновения больших толчков тока и ударных электромагнитных сил, способных вызвать повреждение генератора или нарушение работы электрической сети, в которую включается генератор.
Рис. 2. Схема подключения синхронного генератора к сети на параллельную работу:
2. Схема подключения синхронного генератора к сети на параллельную работу:
а — векторная диаграмма напряжений, б — схема включения ламп синхроноскопа «на погасание», в — схема включения ламп синхроноскопа «на вращение света», г — кривые напряжений сети и генератора при синхронизации
Для возможности параллельной работы необходимо равенство напряжений включаемого генератора UT и сети Uc или уже работающего генератора UT.р; напряжения UT и Uc должны быть в фазе. Равенство напряжений генератора и сети достигается регулированием скорости вращения включаемого генератора путем воздействия на регулятор скорости первичного двигателя или изменения величины тока возбуждения генератора.
Частота включаемого генератора должна быть равна частоте сети. Чередование фаз генератора и сети должно быть одинаково.
Кроме того, необходимо, чтобы проверяемые вольтметровым переключателем ВП напряжения генератора и сети, взятые между любыми двумя проводами, были равны по величине и противоположны по фазе. Противоположность фаз напряжений генератора и сети между всеми тремя парами проводов возможна только при одинаковом порядке чередования фаз сети и генератора.
Противоположность фаз напряжений генератора и сети между всеми тремя парами проводов возможна только при одинаковом порядке чередования фаз сети и генератора.
При точном соблюдении указанных условий векторы напряжений (рис. 2, а) генератора и сети совпадут, разности напряжений будут равны нулю и не будет толчков тойа при включении генератора в сеть.
Несоблюдение условий синхронизации может привести к возникновению между генератором и сетью крайне нежелательных и, при известных условиях, опасных для обмоток генератора уравнительных токов.
Для синхронизации генераторов применяют специальные приборы-синхроноскопы, наиболее простыми из которых являются ламповые. Лампы синхроноскопа могут быть подключены по схеме «на погасание» или на «вращение света».
Синхронизируя генератор с сетью по схемам, показанным на рис. 2, бив, включают параллельно одной из ламп нулевой вольтметр, конструкция которого характерна тем, что начальные деления его шкалы более удалены друг от друга («растянуты»), чем остальные, чтобы даже при малой разности напряжений отклонения стрелки прибора были значительными. Генератор подключают к сети тогда, когда стрелка вольтметра стоит на нуле шкалы прибора *. Если до начала синхронизации лампы схемы будут загораться и гаснуть, это укажет на неодинаковую последовательность чередования фаз генератора и сети. В таком случае, чтобы при синхронизации генераторов добиться правильной работы схемы, следует поменять местами любые два провода, идущие к рубильнику от сети или от генератора.
Генератор подключают к сети тогда, когда стрелка вольтметра стоит на нуле шкалы прибора *. Если до начала синхронизации лампы схемы будут загораться и гаснуть, это укажет на неодинаковую последовательность чередования фаз генератора и сети. В таком случае, чтобы при синхронизации генераторов добиться правильной работы схемы, следует поменять местами любые два провода, идущие к рубильнику от сети или от генератора.
При рассмотрении способов и схем синхронизации целесообразно кратко ознакомиться с процессом наступления момента синхронизации. Для такого ознакомления удобнее всего воспользоваться приведенным на рис. 2, г. графиком напряжений сети и генератора. В процессе синхронизации из-за некоторого несовпадения частот эти напряжения периодически оказываются близкими то к положению совпадения фаз, то к положению противоположности фаз. Фазы совпадают, когда напряжения действуют согласно, и противоположны, когда напряжения действуют встречно. Это приводит к тому, что все лампы схемы, приведенной на рис.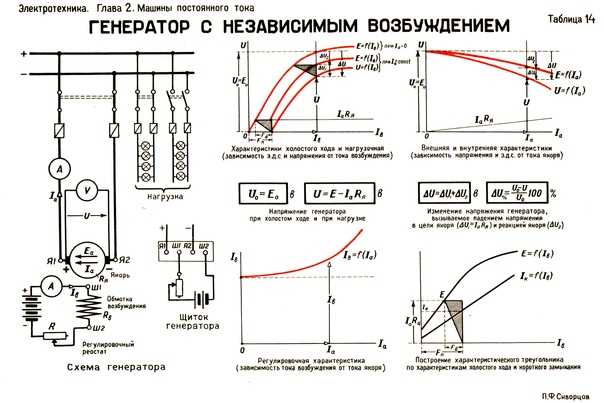 2, б, периодически то ярко светятся, то гаснут, а одна из ламп схемы, показанной на рис. 2, в, гаснет в то время, как остальные две лампы этой схемы светятся ярко. Таким образом, с помощью ламп, включенных по схеме, приведенной на рис. 2, б или в, определяют с необходимой точностью момент совпадения частот генератора и сети по фазе, равенство частот и порядок чередования фаз.
2, б, периодически то ярко светятся, то гаснут, а одна из ламп схемы, показанной на рис. 2, в, гаснет в то время, как остальные две лампы этой схемы светятся ярко. Таким образом, с помощью ламп, включенных по схеме, приведенной на рис. 2, б или в, определяют с необходимой точностью момент совпадения частот генератора и сети по фазе, равенство частот и порядок чередования фаз.
Включение на параллельную работу синхронных генераторов
В отличие от генераторов постоянного тока синхронные генераторы параллельно могут работать лишь при одинаковых угловых скоростях их роторов, т. е. при синхронном вращении. Выполнение операций по включению на параллельную работу синхронных генераторов называется синхронизацией.
На судах применяются три метода синхронизации синхронных генераторов: точная синхронизация, самосинхронизация и грубая синхронизация. Рассмотрим эти методы подробно.
Точная синхронизация. Для включения на параллельную работу двух синхронных генераторов или генератора с сетью методом точной синхронизации необходимы следующие условия:
1) равенство э. на 90°. Таким образом, ток является практически индуктивным для генератора с большей э. д. с. и, создавая размагничивающую реакцию статора, уменьшает его э. д. с. Для генераторов с меньшей э. д. с. этот ток является емкостным и, создавая намагничивающую реакцию статора, увеличивает их э. д. с. и напряжение Uc. Ток, вызванный разностью напряжений, называется уравнительным. Его реактивный характер является причиной того, что он не создает дополнительных нагрузок на первичные двигатели. Однако большие по величине уравнительные токи могут вызвать опасные динамические усилия в обмотках генераторов и их перегрев. Поэтому на практике не допускается разность напряжений, превышающая 6—8% номинального напряжения.
на 90°. Таким образом, ток является практически индуктивным для генератора с большей э. д. с. и, создавая размагничивающую реакцию статора, уменьшает его э. д. с. Для генераторов с меньшей э. д. с. этот ток является емкостным и, создавая намагничивающую реакцию статора, увеличивает их э. д. с. и напряжение Uc. Ток, вызванный разностью напряжений, называется уравнительным. Его реактивный характер является причиной того, что он не создает дополнительных нагрузок на первичные двигатели. Однако большие по величине уравнительные токи могут вызвать опасные динамические усилия в обмотках генераторов и их перегрев. Поэтому на практике не допускается разность напряжений, превышающая 6—8% номинального напряжения.
Выполнение второго и третьего условий синхронизации осуществляется регулированием угловой скорости первичного двигателя подключаемого генератора путем изменения подачи рабочего тела в двигатель.
Известно, что положение ротора синхронного генератора в каждый момент времени может быть определено вектором э. , ток биения будет создавать периодически меняющуюся активную нагрузку (биения) на подключаемый и работающие генераторы и их приводные двигатели. В результате этого подключаемый генератор в синхронизм не войдет, а работающие генераторы из синхронизма
, ток биения будет создавать периодически меняющуюся активную нагрузку (биения) на подключаемый и работающие генераторы и их приводные двигатели. В результате этого подключаемый генератор в синхронизм не войдет, а работающие генераторы из синхронизма
выпадут. Потребители электроэнергии могут отключиться от ГРЩ из-за недопустимого провала напряжения. Поэтому уравнивание частот является одной из наиболее ответственных операций синхронизации и требует соответствующей квалификации и навыка обслуживающего персонала.
При синхронизации контроль разности частот осуществляется с помощью ламповых и стрелочных синхроноскопов. В настоящее время на судах наибольшее распространение получили стрелочные синхроноскопы, представляющие собой сельсин с трехфазной обмоткой на статоре и однофазной — на роторе. Через добавочные сопротивления ДС трехфазная обмотка присоединяется к подключаемому генератору, а однофазная — к работающему (к шинам ГРЩ). Взаимодействие магнитных полей обмоток вызывает вращение ротора и стрелки сельсина с угловой скоростью, пропорциональной разности частот, причем вращение в направлении «Быстро» указывает на то, что частота подключаемого генератора выше частоты сети и требуется воздействие на серводвигатель с целью уменьшения подачи топлива (или пара) в первичный двигатель. При медленном вращении в момент подхода стрелки к нулевой отметке следует включить автомат А.
При медленном вращении в момент подхода стрелки к нулевой отметке следует включить автомат А.
Выполнение четвертого условия синхронизации проверяется только после монтажа установки.
Точная синхронизация представляет собой сложный и длительный процесс, который в аварийных ситуациях может вызвать увеличение перерыва в подаче энергии потребителям.
Допущенные при включении на параллельную работу синхронных генераторов ошибки, как было показано выше, могут привести к тяжелым последствиям. Поэтому в настоящее время существует ряд схем, позволяющих автоматизировать процесс точной синхронизации.
Рис. 3. Схема включения стрелочного синхроноскопа.
Самосинхронизация. Способ самосинхронизации является более простым, исключает возможность несинхронных включений и требует меньше времени для осуществления. Он заключается в том, что невозбужденный синхронный генератор разгоняется первичным двигателем до угловой скорости, на 2—3% отличающейся от синхронной. При этом статор генератора подключается к сети, а обмотка возбуждения — к источнику постоянного тока (возбудителю). До подачи напряжения обмотка возбуждения замкнута на сопротивление во избежание перенапряжений, опасных для витко-вой изоляции.
До подачи напряжения обмотка возбуждения замкнута на сопротивление во избежание перенапряжений, опасных для витко-вой изоляции.
Генератор втягивается в синхронизм под действием реактивного, асинхронного и синхронного моментов, возникающих в генераторе. Реактивный момент возникает в генераторах с явно-полюсным ротором, который увлекается вращающимся полем статора. Включенный в сеть невозбужденный синхронный генератор представляет собой асинхронную машину со скольжением, уменьшающимся под действием асинхронного момента. Если скорость вращения синхронизируемого генератора больше скорости работающих генераторов, то он оказывается в режиме асинхронного генератора и развивает момент, затормаживающий первичный двигатель до синхронной скорости генератора. Если угловая скорость синхронизируемого генератора меньше угловой скорости работающих генераторов, то он работает в режиме асинхронного двигателя и развивает вращающий момент, ускоряющий первичный двигатель до синхронной скорости. По мере уменьшения скольжения уменьшается и асинхронный момент. В этих условиях (если возбуждение уже включено) основным синхронизирующим моментом становится синхронный момент генератора.
В этих условиях (если возбуждение уже включено) основным синхронизирующим моментом становится синхронный момент генератора.
Включение невозбужденного синхронного генератора происходит аналогично включению асинхронного короткозамкнутого двигателя и также сопровождается бросками тока статора, равными (5—7)/ном и значительными провалами напряжения в сети. Однако броски тока и провалы напряжения восстанавливаются в течение первой секунды и поэтому не нарушают синхронизации и не оказывают значительного вредного воздействия на работу электроэнергетической системы.
В настоящее время разработан ряд схем самосинхронизации, основанных на применении реле разности частот и обеспечивающих различную степень автоматизации процесса. Однако невозможность синхронизации генератора, работающего под нагрузкой, а также указанные выше недостатки ограничивают применение метода самосинхронизации.
Грубая синхронизация. Грубой синхронизацией называется включение синхронного генератора на параллельную работу без соблюдения условий точной синхронизации, т. е. допускается разность частот синхронизируемых генераторов до 3—4% и практически любое несовпадение фаз и различие напряжений. Поэтому такое включение всегда сопровождается «толчком тока и провалом напряжения. Чтобы уменьшить их, включение производят через реактор, который после синхронизации шунтируется или отключается.
е. допускается разность частот синхронизируемых генераторов до 3—4% и практически любое несовпадение фаз и различие напряжений. Поэтому такое включение всегда сопровождается «толчком тока и провалом напряжения. Чтобы уменьшить их, включение производят через реактор, который после синхронизации шунтируется или отключается.
Одна из схем грубой синхронизации представлена на рис. 4. После пуска первичного двигателя, достижения им номинальной скорости вращения и готовности к приему нагрузки замыкается контакт КР1 (или КР2) контактора реактора, включая синхронизируемый генератор на шины ГРЩ через реактор Р.
Рис. 4. Схема грубой синхрониза ции синхронных генераторов.
В зависимости от характера выполняемых операций все три вида синхронизации подразделяются на ручную, полуавтоматическую и автоматическую. При ручной синхронизации все операции по выполнению условий синхронизации и включению генератора на шины ГРЩ выполняются обслуживающим персоналом вручную. Полуавтоматическая синхронизация предусматривает такой процесс, в котором оператор подготавливает условия для включения генератора на параллельную работу, а элементы схемы (реле и др. ) улавливают момент и производят включение генератора на шины. При автоматической синхронизации подгонка частоты, включение генератора и распределение нагрузки выполняется автоматически без непосредственного вмешательства оператора.
) улавливают момент и производят включение генератора на шины. При автоматической синхронизации подгонка частоты, включение генератора и распределение нагрузки выполняется автоматически без непосредственного вмешательства оператора.
Читать далее: Распределение нагрузки между параллельно работающими синхронными генераторами
Категория
Судовые электростанции
Параллельная работа синхронных генераторов — Синхронные машины (Инженерия)
4. Параллельная работа синхронных генераторов (тема 24)
4.1. Включение генераторов на параллельную работ
Практически все мощные генераторы работают параллельно. Обмотки якорей генераторов одной электрической станции через повышающие трансформаторы включены в общую сеть, связанную линиями электропередачи с электрической системой.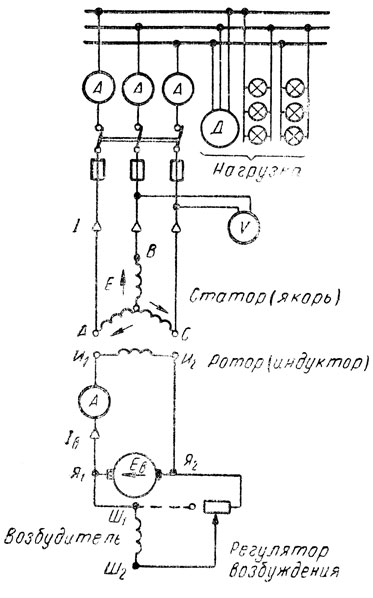 Современные энергетические системы объединяют сотни генераторов, установленных на различных электростанциях, с суммарной мощностью 104 МВт и более.
Современные энергетические системы объединяют сотни генераторов, установленных на различных электростанциях, с суммарной мощностью 104 МВт и более.
Параллельная работа генераторов повышает надежность электроснабжения, так как авария, какого-либо одного генератора или отключение его для ремонта не вызывают перерыва в питании потребителей. Появляется возможность рационального использования энергоресурсов за счет перераспределения нагрузок между генераторами. Но наиболее важно повышение качества электроэнергии: в мощных энергосистемах частота и напряжение практически постоянны и не зависят от условий работы каждого генератора в отдельности.
Включение генератора на параллельную работу с сетью — одна из наиболее ответственных операций, так как в общем случае напряжения, частоты и чередование фаз сети и генератора могут отличаться. При включении возможны значительные броски токов, электромагнитных сил и мо-ментов, которые могут вызвать аварию генератора и другого оборудования или нарушить режим работы энергосистемы. Поэтому необходимо подготовить генератор к включению на холостом ходу. Совокупность операций, требуемых для безаварийного включения генератора в сеть, назызывают синхронизацией. Различают два вида включения: способом точной синхронизации и самосинхронизации (грубой синхронизации).
Поэтому необходимо подготовить генератор к включению на холостом ходу. Совокупность операций, требуемых для безаварийного включения генератора в сеть, назызывают синхронизацией. Различают два вида включения: способом точной синхронизации и самосинхронизации (грубой синхронизации).
Включение генератора в сеть способом точной синхронизации
Простейшая схема точной синхронизации с помощью лампового синхроноскопа изображена на рис. 4.1. Устройство из ламп Л1, Л2, Л3, включенных в рассечку фаз параллельно контактам выключателя K называется синхроноскоп. Гасительное сопротивления RГ и контакты выключателей K1, K2 составляют автомат гашения поля АГП (см. параграф 1.3.).
При включении генератора в сеть необходимо выполнить следующие условия точной синхронизации:
1) чередование фаз генератора А, В, С и сети АС, ВС, СС одинаково;
2) напряжение генератора U (ЭДС Ef) равно напряжению сети UC;
3) частота ЭДС генератора f равна частоте напряжения сети fC;
4) в момент включения разность потенциалов между cоединяемыми точками сети и генератора оU = UC + U должна быть равна нулю.
Правильность чередования фаз проверяют только при первом включении генератора после монтажа или ремонта.
При разомкнутых контактах выключателя K (рис. 4.1, а) приводным двигателем или турбиной разворачивают ротор генератора до частоты вращения n, близкой к синхронной n1. Контакты АГП K2 замыкают, K1 размыкают и присоединяют обмотку возбуждения к возбудителю.
Поддерживая частоту вращения ротора n ≈ n1 постоянной, регулируют ток возбуждения I f так, чтобы напряжение U (ЭДС холостого хода E f) обмотки якоря генератора стало равно напряжению сети UС.
До включения обмотки якоря в сеть невозможно обеспечить постоянство частоты вращения ротора n = n1, и частота вращения ротора n медленно изменяется. Частота напряжений генератора f = pn также медленно изменяется, тогда как частота сети fC= const. Поэтому угол между вектора-ми ЭДС якоря Ėf и напряжения сети U каждой фазы периодически изменя-ется от 0 до 360°, а мгновенная разность потенциалов DUC = Ėf + UC меж-ду контактами каждой фазы выключателя K — от 0 (рис. 4.2, а, б) до 2UC (рис. 4.2, в, г) c частотой пульсаций | f – fC|. На рис. 4.2, б, в, г показаны ди-аграммы векторов UC и Ėf одной фазы, векторные диаграммы других фаз аналогичны с учетом сдвига на 120° и 240° (см. рис. 4.2, а при ΔU = 0).
Частота напряжений генератора f = pn также медленно изменяется, тогда как частота сети fC= const. Поэтому угол между вектора-ми ЭДС якоря Ėf и напряжения сети U каждой фазы периодически изменя-ется от 0 до 360°, а мгновенная разность потенциалов DUC = Ėf + UC меж-ду контактами каждой фазы выключателя K — от 0 (рис. 4.2, а, б) до 2UC (рис. 4.2, в, г) c частотой пульсаций | f – fC|. На рис. 4.2, б, в, г показаны ди-аграммы векторов UC и Ėf одной фазы, векторные диаграммы других фаз аналогичны с учетом сдвига на 120° и 240° (см. рис. 4.2, а при ΔU = 0).
Лампы синхроноскопа Л1–Л3, включенные параллельно контактам выключателя K, одновременно мигают с той же частотой, загораясь наиболее ярко при DU = 2UС (рис. 4.2, г) и потухая при DU = (0,3-0,6)UС. Параллельно одной из ламп включают нулевой вольтметр рV, служащий для более точного определения DU и выбора момента включения. Регулируют частоту вращения ротора так, чтобы период мигания ламп был достаточно большим (3-40 секунд) и можно было успеть включить контакты выключателя K в течение отрезка времени пока DU близко к нулю.
4.2, г) и потухая при DU = (0,3-0,6)UС. Параллельно одной из ламп включают нулевой вольтметр рV, служащий для более точного определения DU и выбора момента включения. Регулируют частоту вращения ротора так, чтобы период мигания ламп был достаточно большим (3-40 секунд) и можно было успеть включить контакты выключателя K в течение отрезка времени пока DU близко к нулю.
Когда лампы погаснут и нулевой вольтметр покажет DU = 0, замыкают контакты выключателя K и включают генератор в сеть.
Если все условия точной синхронизации выполнены идеально, токов в обмотке якоря генератора не возникает. Генератор будет работать в режиме холостого хода при включенной в сеть обмотке якоря.
Наиболее опасно ошибочное включение при DU = 2UС. В этом случае при неблагоприятной фазе включения амплитуда тока включения значительно превышать амплитуду номинального тока якоря
, (4. 1)
1)
где х*//d – сверхпереходное продольное индуктивное сопротивление фазы якоря, о.е.; х*К – сопротивление короткого замыкания трансформатора и других элементов подключения обмотки якоря генератора к сети, о.е.
Обычно х*//d = 0,125–0,35; х*К = 0,1–0,3 и i*ВКЛ = 5–18, то есть может превысить ударный ток короткого замыкания, величина которого в о.е. не должна превышать 15 (i*УД ≤ 15). При этом сильно увеличиваются электромагнитные силы и моменты, действующие на обмотки и магнитопроводы машины, детали крепления и узлы соединения с турбиной, что может вызвать их механическое повреждение или разрушение.
Рассмотренный способ синхронизации называют синхронизацией на “потухание ”. Если в процессе синхронизации по схеме рис. 4.1, а лампы загораются и гаснут не одновременно, а поочередно, следует изменить чередование фаз генератора (нарушено первое условие синхронизации).
При нарушении чередования фаз синхронизация невозможна, так как МДС возбуждения и якоря вращаются в противоположных направлениях и не образуют результирующего магнитного поля машины, вращающегося с синхронной скоростью. В результате кратковременного взаимодействия встречновращающихся МДС якоря и возбуждения возникают знакопеременные силы и моменты большой величины, которые вызывают шумы, вибрации и могут привести к повреждению машины, а в обмотке якоря возникают токи, превышающие номинальные в 2–10.
С помощью лампового синхроноскопа возможна точная синхронизация на “вращение света” или на “свет”. Одну из ламп, например Л2, включают как и ранее в фазу В (рис. 4.1, б), лампы Л1, Л3 включают на линейные напряжения между фазами А и С. В момент выполнения условий синхронизации лампа Л3 гаснет, а лампы Л1, Л3 светят одинаково ярко.
На практике используют более сложные схемы синхронизации с ручным или автоматическим включением генераторов на параллельную работу. Основное преимущество точной синхронизации — возможность включения генератора без бросков тока в обмотке якоря. Недостатки такой синхронизации: сложность, длительное время синхронизации, возможность ошибочных действий операторов, особенно в условиях аварии, когда требуется быстро выполнить повторное включения генератора. Для ускорения включения генераторов используют грубую синхронизацию (самосинхронизацию).
Основное преимущество точной синхронизации — возможность включения генератора без бросков тока в обмотке якоря. Недостатки такой синхронизации: сложность, длительное время синхронизации, возможность ошибочных действий операторов, особенно в условиях аварии, когда требуется быстро выполнить повторное включения генератора. Для ускорения включения генераторов используют грубую синхронизацию (самосинхронизацию).
Включение генератора в сеть способом грубой синхронизации
Элементы схемы (рис. 4.3) включения синхронного генератора способом грубой синхронизации имеют такое же назначение, как и в схеме включения способом точной синхронизации (рис. 4.1).
При включении генератора в сеть необходимо выполнить следующие условия грубой синхронизации (самосинхронизации):
1) чередование фаз сети и генератора одинаково;
2) частоты напряжений сети fС и генератора f примерно равны.
Перед включением с помощью АГП (контакты K1 замкнут, K2 разомкнут) в цепь обмотки возбуждения включают гасительное сопротивление RГ. Приводным двигателем или турбиной разгоняют ротор генератора до скорости, близкой к синхронной n = (0,95–0,99)n1. Устанавливают та-кое напряжение возбудителя Uf , при котором ЭДС обмотки якоря на холостом ходу Ef будет равна напряжению сети UC или немного больше.
Замыкают контакты выключателя K и включают обмотку якоря в сеть. Под действием напряжения сети в обмотке якоря появится ток, который образует МДС якоря Fa, вращающуюся с частотой n1 = f1/p.
Практически одновременно после замыкания контактов K включают АГП (контакты K2 замыкают, K1 размыкают) и обмотку возбуждения генератора соединяют с возбудителем. Под действием напряжения Uf в обмотке возбуждения появится ток If, который образ нет МДС возбуждения Ff, вращающуюся с частотой близкой к синхронной n ≈ n1.
При взаимодействии вращающихся с близкими скоростями МДС Fa и Ff возникает синхронный момент За счет этого момента частота вращения ротора достигает частоты вращения МДС якоря (n = n1) и генератор втягивается в синхронизм. Более быстрому втягиванию в синхронизм способствует асинхронный момент, образуемый демпферной обмоткой при несинхронном вращении ротора (n ≠ n1).
Самосинхронизация требует значительно меньше времени, чем точная синхронизация, так как не нужно дожидаться уравновешивания напряжений сети и генератора.
Вследствие того, что при грубой синхронизации не контролируют фазу напряжения сети, а ЭДС генератора в момент включения Ef = 0, разность потенциалов в момент включения DU равна напряжению сети UC. Включение невозбужденного генератора на напряжение сети UC равносильно внезапному короткому замыканию обмотки якоря с режима холостого хода при ЭДС якоря Еf = UC. В обмотке якоря возникают токи в несколько раз превышающие номинальный ток генератора, что является основным недостатком самосинхронизации.
В обмотке якоря возникают токи в несколько раз превышающие номинальный ток генератора, что является основным недостатком самосинхронизации.
Максимально возможная амплитуда тока включения при номинальном напряжении сети и неблагоприятной фазе включения наступает через половину периода Т/2 ≈ 0,01 с от момента замыкания контактов K
(4.2)
где все обозначения соответствуют экспликации формулы (4.1).
В наиболее неблагоприятном случае i*ВКЛ = 2,5–8. Обычно самосинхронизацию применяют при бросках тока не более 3,5 номинального.
4.2. Регулирование активной мощности
Будем считать, что генератор включен способом точной синхронизации в сеть бесконечно большой мощности, режим работы которой не зависит от данного генератора. Сопротивление такой сети ZC = 0, напряжение UC и частота fC постоянны.
Если выполнены условия синхронизации, то после включения генератора в сеть установится режим холостого хода. Магнитное поле машины образовано только током возбуждения If и индуктирует в обмотке статора ЭДС Еf = UC (рис. 4.4, а). Ротор вращается с синхрнной частотой n = n1 приложенным к валу машины моментом приводного двигателя МВ= М1, равным моменту холостого хода генератора М0. Если пренебречь потерями холостого хода, то можно считать М1= 0.
Магнитное поле машины образовано только током возбуждения If и индуктирует в обмотке статора ЭДС Еf = UC (рис. 4.4, а). Ротор вращается с синхрнной частотой n = n1 приложенным к валу машины моментом приводного двигателя МВ= М1, равным моменту холостого хода генератора М0. Если пренебречь потерями холостого хода, то можно считать М1= 0.
Векторы UС и Ėf = – UC вращаются с одинаковой частотой ω = ωC. Напряжения сети и генератора уравновешены. Поэтому разность потенциалов между сетью и машиной DU = UC + Ėf = 0 и ток якоря I = 0.Ось полюса d совпадает c осью результирующего магнитного поля машины и пространственный угол между ними θГ = 0 (рис. 4.4, а). Магнитное поле в зазоре симметрично относительно оси d. Поэтому между статором и ротором действуют только радиальные силы притяжения. Они уравновешены по окружности машины и не образуют электромагнитного момента.
4.4, а). Магнитное поле в зазоре симметрично относительно оси d. Поэтому между статором и ротором действуют только радиальные силы притяжения. Они уравновешены по окружности машины и не образуют электромагнитного момента.
Включенную в сеть синхронную машину можно нагрузить, регулируя механическую мощность (момент) на валу и ток возбуждения.
Если увеличить вращающий момент МВ = М1 > 0 приводного двигателя, ротор получит положительное ускорение. Частота вращения ротора n хотя бы кратковременно станет больше постоянной частоты вращения поля nC = n1. Ось d сместится от оси магнитного поля на угол θГ в направлении вращения ротора (рис. 4.4. б). Вектор ЭДС Ėf опережает напряжение машины U на электрический угол θ = рθГ ( р – число пар полюсов) и между сетью и машиной возникает разность потенциалов DU = UC + Ėf ≠ 0.
Под действием DU в обмотке якоря появится ток I, отстающий от DU практически на четверть периода вследствие большого индуктивного
сопротивления обмотки якоря (риc. 4.4, б). Синхронная машина отдает активную электрическую мощность Р2 = mUI cosφ > 0 (см. формулу 3.74) в сеть, то есть работает в режиме генератора.
Возникающая при отдаче активной мощности поперечная МДС якоря Faq искажает магнитное поле в зазоре машины (см. параграф 3.1). Электромагнитные силы притяжения между статором и ротором стремятся совместить оси полюса d и результирующего магнитного поля (оси полюсов N и S на рис. 4.4, б), то есть уменьшить угол θГ (θ). Поэтому в генераторе возникает тормозной электромагнитный момент M, уравновешивающий механический вращающий момент M1 и частота вращения ротора n остается неизменной. Угол θ называют углом нагрузки и в генераторном режиме считают положительным.
Если к валу ротора приложить тормозной механический момент МВ = М2 < 0, то ось полюсов d в пространстве и вектор ЭДС Ėf на диаграмме будут отставать на угол θГ (θ) от оси магнитного поля и вектора напряжения машины U (рис. 4.4, в). Угол φ между векторами тока İ и напряжения U близок к 180°. Синхронная машина потребляет из сети активную мощность Р2 = mUI cosφ < 0 и развивает вращающий электромагнитный момент M, равный внешнему тормозному моменту M2, то есть переходит в двигательный режим. При равенстве моментов М = М2 частота вращения ротора также станет постоянной. Угол нагрузки θ в двигательном режиме считают отрицательным.
В общем случае регулирование активной мощности синхронной машины, работающей параллельно с сетью, возможно только изменением внешнего механического момента на валу. При увеличении вращающего момента машина переходит в генераторный режим и отдает в сеть активную электрическую мощность, при увеличении тормозного момента машина потребляет активную мощность из сети и переходит в двигательный режим. Частота вращения ротора n неизменна и равна синхронной.
При увеличении вращающего момента машина переходит в генераторный режим и отдает в сеть активную электрическую мощность, при увеличении тормозного момента машина потребляет активную мощность из сети и переходит в двигательный режим. Частота вращения ротора n неизменна и равна синхронной.
4.3. Электромагнитные мощность и момент
Если пренебречь потерями мощности в магнитопроводе и обмотке якоря, то полезная P2 и электромагнитная P мощности генератора равны
. (4.3)
Из упрощенной диаграммы напряжений явнополюсного синхронного генератора (рис. 4.5) следует, что φ = ψ – θ и электромагнитная мощность
(4.4)
Составляющие тока якоря Id, Iq можно выразить через напряжение U, ЭДС Ef и угол нагрузки машины θ (см. рис. 4.5)
. (4.5)
Подставив значения Id, Iq в (4.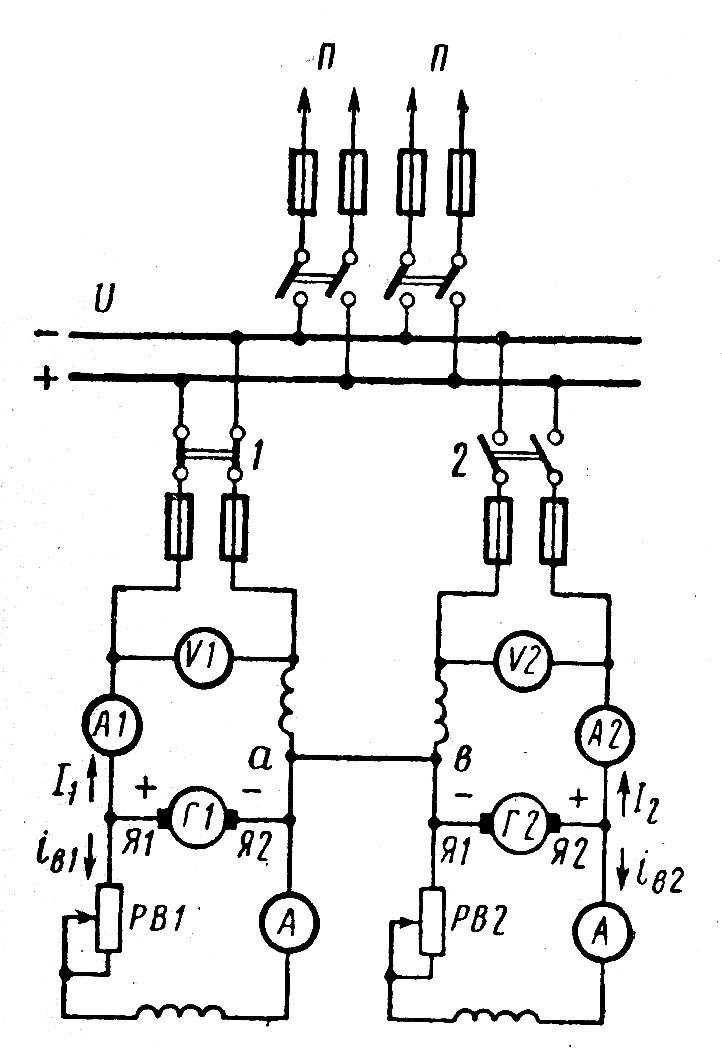 4) и используя формулы тригонометрических преобразований, получим
4) и используя формулы тригонометрических преобразований, получим
. (4.6)
Электромагнитный момент М равен отношению электромагнитной мощности Р к механической угловой скорости вращения ротора Ω = 2πn1:
. (4.7)
Первые слагаемые в формулах (4.6), (4.7) представляют собой мощность Р / и момент М /, возникающие при взаимодействии вращающегося магнитного поля с МДС возбуждения ротора.
Образование М/ и Р/ физически объяснимо появлением сил магнитного притяжения полюсов N и S двух областей намагниченности на статоре и роторе при наличии между осями этих полюсов угла θ (рис. 4.4). Намагниченность полюса N ротора определяется в основном током возбуждения. Поэтому составляющие М/ и Р/ электромагнитных мощности и момента зависят от тока возбуждения и в выражениях (4.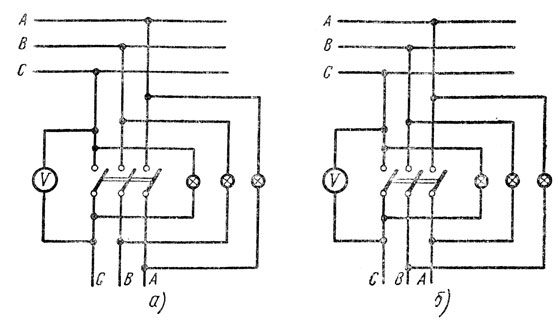 6), (4.7) пропорциональны ЭДС Ef= f (I f) = φ(Ff).
6), (4.7) пропорциональны ЭДС Ef= f (I f) = φ(Ff).
Вторые слагаемые М// и Р// в (4.6), (4.7) не зависят от возбуждения, а определяются различием синхронных индуктивных сопротивлений xd и xq, обусловленным магнитной несимметрией ротора. Поэтому Р// и момента М// называют соответственно мощностью и моментом явнополюсности.
Образование мощности Р// и момента М// при отсутствии возбуждения можно объяснить тем, что вращающееся магнитное поле якоря стремится замыкаться по пути с минимальным магнитным сопротивлением.
При угле θГ = 0 (рис. 4.6, а) оси d ротора и поля якоря совпадают. В этом случае магнитное сопротивление продольному магнитному потоку якоря минимально, так как определяется небольшим зазором по оси d между сердечниками полюса и статора. Магнитное поле в зазоре симметрично относительно оси d. Поэтому тангенциальные (перпендикулярные к оси d) силы магнитного притяжения статора к ротору уравновешены по окружности и действующий на ротор электромагнитный момент М = 0.
В этом случае магнитное сопротивление продольному магнитному потоку якоря минимально, так как определяется небольшим зазором по оси d между сердечниками полюса и статора. Магнитное поле в зазоре симметрично относительно оси d. Поэтому тангенциальные (перпендикулярные к оси d) силы магнитного притяжения статора к ротору уравновешены по окружности и действующий на ротор электромагнитный момент М = 0.
При появлении угла θГ ≠ 0 магнитное поле якоря в зазоре машины искажается (рис. 4.6. б) и возникают неуравновешенные тангенциальные электромагнитные силы FМ, образующие электромагнитный момент М//. Момент М// стремится совместить продольную ось полюсов d с осью магнитного поля якоря, чтобы линии индукции поля якоря замыкались по пути с наименьшим магнитным сопротивлением (по оси d).
Вследствие этого работающая параллельно с сетью синхронная явнополюсная машина при отсутствии или потере возбуждения развивает небольшую активную мощность Р //, составляющую в большинстве машин от 0,1 до 0,25 номинальной мощности машины Р2Н.
В неявнополюсных машинах синхронные сопротивления xd, xq практически равны и в выражениях (6.6), (6.7) составляющие Р// = М// = 0. Электромагнитные мощность и момент содержат одну составляющую
; (4.8)
. (4.9)
Эти машины могут развивать активную мощность только при наличии возбуждения. При отсутствии возбуждения магнитное поле якоря в зазоре не искажается независимо от положения оси d цилиндрического ротора (рис. 4.6, в), так как зазор между статором и ротором постоянен. Поэтому не возникают тангенциальные электромагнитные силы FМ и момент Р //и мощность М // явнополюсности равны нулю.
4.4. Угловая характеристика активной мощности.
Статические устойчивость и перегружаемость
Зависимости P = f (θ), M = f (θ) при постоянных напряжении сети UC, частоте сети fC и токе возбуждения I f называют угловыми характеристиками активной мощности и электромагнитного момента
Угловые характеристики P, М = f (θ) явнополюсного генератора изображены на рис. 6.7 сплошной линией, пунктиром показаны составляющие Р/, М/ и Р//, М//, соответствующие первому и второму слагаемым в (4.6), (4.7). Генератор развивает номинальную активную мощность при номинальном угле нагрузки θН = 20°– 35°, максимальную мощность Рm при максимальном угле нагрузки θm = 70°– 80°.
6.7 сплошной линией, пунктиром показаны составляющие Р/, М/ и Р//, М//, соответствующие первому и второму слагаемым в (4.6), (4.7). Генератор развивает номинальную активную мощность при номинальном угле нагрузки θН = 20°– 35°, максимальную мощность Рm при максимальном угле нагрузки θm = 70°– 80°.
Угловые характеристики неявнополюсного генератора представляют собой один полупериод синусоиды (пунктирные линии Р/, М/ на рис. 6.7). У таких генераторов θН = 25°– 40°, θm = 90°.
В установившемся режиме работы генератора механические момент М1 и мощность P1, подводимые к валу машины от приводного двигателя или турбины, уравновешены электромагнитными моментом М и мощностью Р. Равенства Р1= Р и М1 = М справедливы в точках 1 и 2 угловой характеристики (рис. 4.8), то есть теоретически возможен установившийся режим работы генератора с углами нагрузки θ1 и θ2.
Равенства Р1= Р и М1 = М справедливы в точках 1 и 2 угловой характеристики (рис. 4.8), то есть теоретически возможен установившийся режим работы генератора с углами нагрузки θ1 и θ2.
На практике частота fC и напряжение UC сети, ток возбуждения I f и подводимая к валу механическая мощность P1 могут
меняться. Небольшие изменения этих величин ΔfC , ΔUC, ΔI f, ΔP1 вызывают изменение угла нагрузки θ. Под статической устойчивостью понимают способность синхронного генератора вернуться к исходному установившемуся режиму работы после окончания действия небольших или медленных изменений (возмущений режима работы) ΔfC , ΔUC, ΔI f, ΔP1.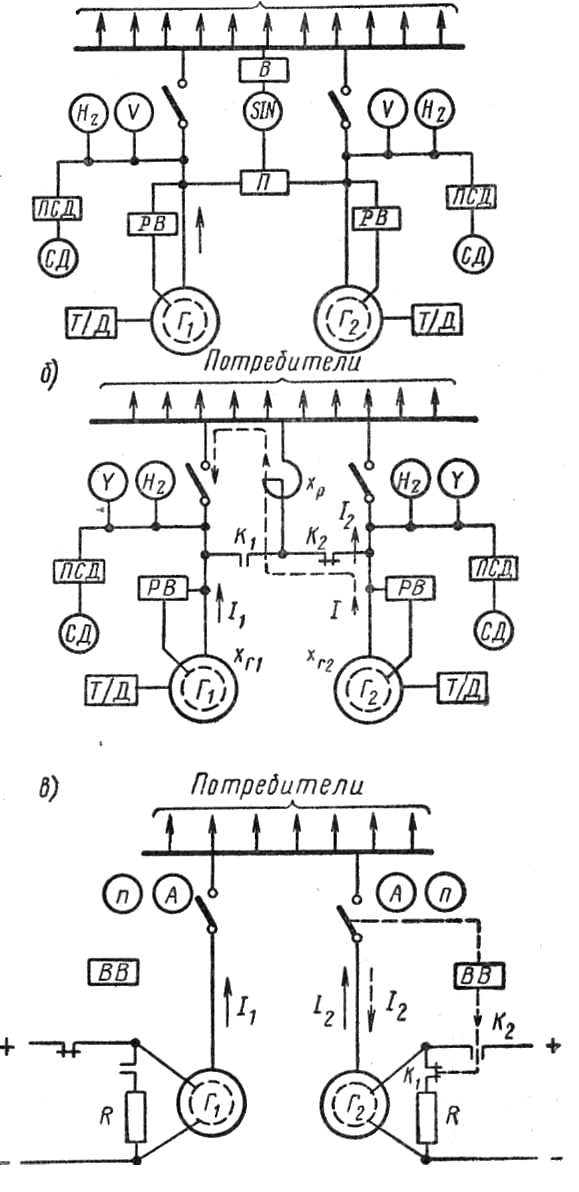
Для оценки статической устойчивости работы генератора в точках 1 и 2 (рис. 4.8) рассмотрим небольшие изменения угла θ при постоянных механических моменте М1 и мощности Р1, подводимых к валу машины.
Если при работе генератора с углом нагрузки θ1 по каким-либо причинам угол θ увеличится на Δθ и станет равным θ1/, то отдаваемая в сеть активная мощность Р2 ≈ Р превысит мощность приводного двигателя на ΔP = Р1 – P(·)1/ < 0. В машине возникает тормозной момент ΔM = ΔP/Ω = [Р1 – P(·)1/ ] /Ω < 0. Под действием ΔM ротор генератора получит отрицательное ускорение. Частота вращения ротора n станет меньше синхронной n1 и угол θ уменьшится до значения θ1, при котором выполнены условия механического равновесия М1 = М (Р1= Р), а частота вращения ротора n станет постоянной и равной синхронной n1.
Если угол θ уменьшится до θ1//, то подводимая механическая мощность Р1 станет больше электромагнитной мощности Р на ΔP = Р1 – P(·)1// > 0. Возникает вращающий момент ΔM = ΔP/Ω = [Р1 – P(·)1//] /Ω > 0, который сообщит ротору генератора положительное ускорение. Частота вращения ротора n будет выше синхронной n1 и угол нагрузки увеличится до значения θ1, соответствующего механическому равновесию М1 = М. При θ = θ1 частота вращения ротора n станет постоянной и равной n1. Следовательно работа генератора с углом нагрузки θ1 статически
При работе генератора с углом нагрузки θ2 увеличение угла θ до θ2/ > θ2 приводит к появлению вращающего момента ΔM = [Р1 – P(·)2/ ] /Ω > 0. Ротор получит положительное ускорение, угол θ увеличится еще больше и генератор может выйти из синхронизма. В этом случае частота вращения ротора n больше частоты вращения магнитного поля машины n1 и угол нагрузки θ периодически меняется от 0 до 360°.
Ротор получит положительное ускорение, угол θ увеличится еще больше и генератор может выйти из синхронизма. В этом случае частота вращения ротора n больше частоты вращения магнитного поля машины n1 и угол нагрузки θ периодически меняется от 0 до 360°.
Уменьшение угла θ до θ2// вызовет появление тормозного момента ΔM = [Р1 – P(·)2//] /Ω < 0 и угол θ уменьшается до величины θ1, соответствующей устойчивой работе генератора. Очевидно, работа генератора с углом нагрузки θ2 статически неустойчива.
В связи с произвольным выбором точек 1 и 2 (рис. 4.8) можно сделать вывод, что синхронный генератор работает устойчиво при 0 ≤ θ ≤ θm и неустойчиво при θm < θ ≤ π (180°).
Условие статической устойчивости синхронной машины
или . (4. 10)
10)
Разность ΔP = Р1 – P называется синхронизирующей мощностью, так как за счет ΔP возникает синхронизирующий момент ΔM, под действием которого ротор приходит в положение, соответствующее установившемуся режиму работы синхронного генератора. При небольших изменениях Δθ угла нагрузки
, (4.11)
Производные dP/d θ = pC и dM/d θ = mC называют удельными синхронизирующими мощностью и моментом:
; (4.12)
. (4.13)
Они характеризуют устойчивость работы генератора. Наиболее устойчив режим холостого хода, при котором рС и mС максимальны (рис. 4.8). С увеличением нагрузки рС и mС уменьшается и устойчивость работы генератора снижается. Если нагрузить генератор мощностью Р > Pm, то он выйдет из синхронизма, так как при любом значении угла θ механический вращающий момент преобладает над тормозным электромагнитным моментом M.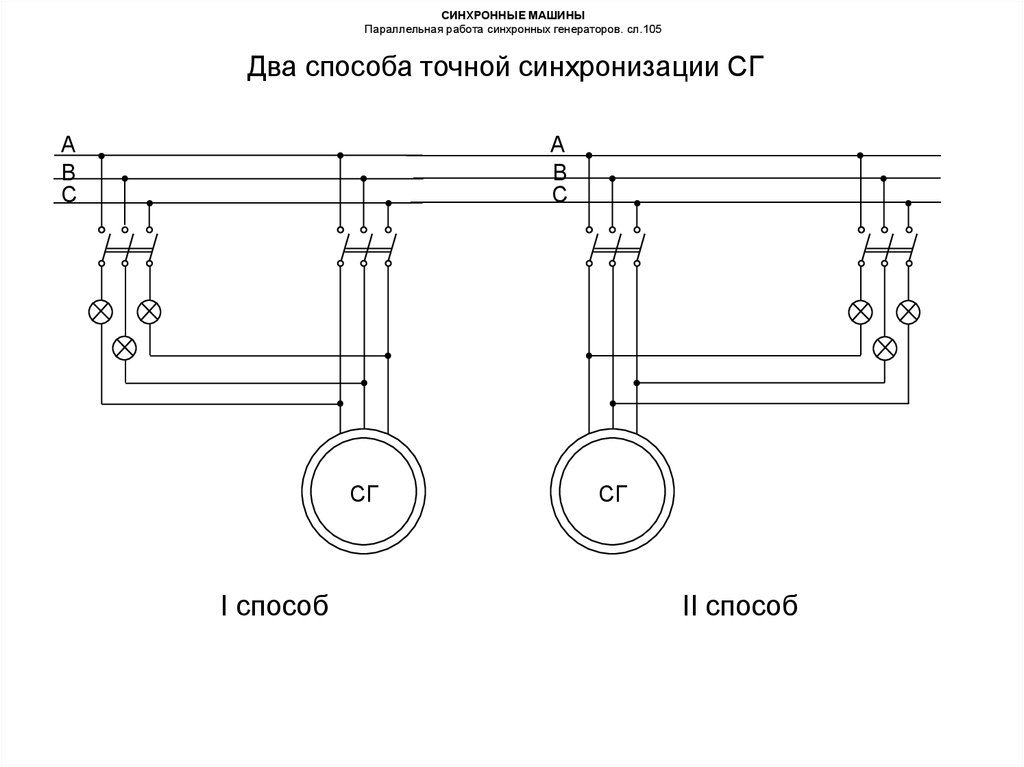 Поэтому максимальную мощность Pm генератора при заданных постоянных UC, fC, I f называют пределом статистической устойчивости или статической перегружаемости.
Поэтому максимальную мощность Pm генератора при заданных постоянных UC, fC, I f называют пределом статистической устойчивости или статической перегружаемости.
Запас статистической устойчивости генератора характеризуют отношением максимальной мощности Pm при номинальных токе возбуждения I f= I fН, напряжении UC = UН и частоте fC = fН сети к номинальной:
. (4.14)
Величину kП называют статической перегружаемостью или перегрузочной способностью генератора. Для большинства генераторов статическая перегружаемость должна быть не менее 1,7 (kП ≥ 1,7).
Учитывая, что ОКЗ ≡ 1/xd и xd ≡ 1/δ (см. формулу (3.58), выражение (4.14) можно записать в следующем виде:
формулу (3.58), выражение (4.14) можно записать в следующем виде:
. (4.15)
Согласно (4.15) статическая перегружаемость может быть повышена увеличением ОКЗ или зазора d на стадии проектирования машины. В этом случае для создания достаточно большого потока возбуждения потребуется увеличить МДС возбуждения F f. При допустимой по условиям нагрева обмотки возбуждения плотности тока возрастет число витков или сечение витка, то есть увеличатся размеры обмотки возбуждения. Вследствие этого при неоправданном увеличении зазора возрастут габариты и стоимость ротора и всей машины.
В турбогенераторах номинальной мощностью РН > 300 МВт, зазор d не превышает 90–100 мм, хотя для получения требуемой статической перегружаемости kП ≥ 1,7 зазор должен быть больше. Причина этого в том, что по условиям механической прочности внешний диаметр ротора современных турбогенераторов D2 ≤ 1,2 м и на роторе нет места для размещения более мощной обмотки возбуждения. Поэтому у турбогенераторов мощностью более 300 МВт приходится снижать статическую перегружаемость kП до 1,5–1,6.
Поэтому у турбогенераторов мощностью более 300 МВт приходится снижать статическую перегружаемость kП до 1,5–1,6.
В условиях экслуатации при постоянных напряжении и частоте сети статическую перегружаемость kП можно кратковременно повысить увеличением тока возбуждения, так как в выражении (4.15) ЭДС Ef = f ( I f).
Повышение kП током возбуждения не увеличит активную мощность генератора Р2 при неизменной механической мощности Р1 на валу. Пусть генератор работает на угловой характеристике А с углом нагрузки θ1 при токе возбуждения I f1 (рис. 4.9). При увеличении тока возбуждения до I f2 генератор перейдет на соответствующую I f2 угловую характеристику В.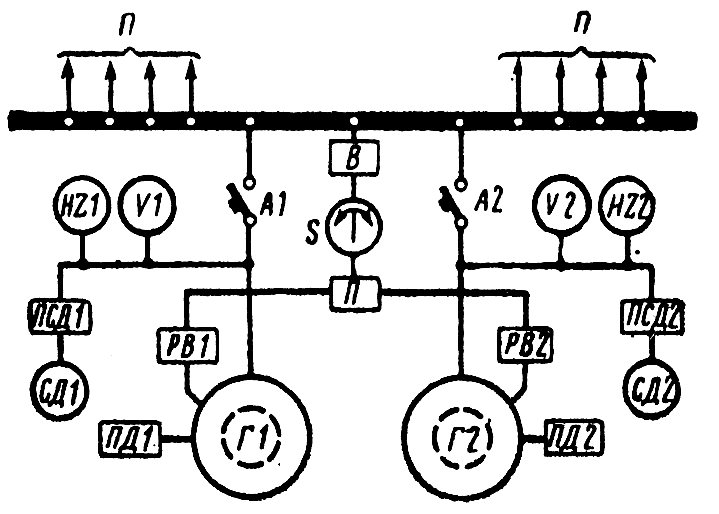
Вследствие большой инерционности ротора угол θ мгновенно измениться не может и в первый момент θ = θ1. Развиваемая генератором электромагнитная мощность Р (точка 1/ на характеристике В) превысит подводимую к валу механическую мощность Р1 = const.
В машине возникают синхронизирующая мощность ΔР = Р1 – Р < 0 и тормозной синхронизирующий момент ΔМ = ΔР/Ω. Угол нагрузки уменьшится до θ2, при котором Р = Р1 (точка 2 на рис. 6.9).
Уменьшение тока возбуждения I f при Р1 = const увеличивает угол θ, ак-тивная электрическая мощность гене-ратора при этом также не изменяется.
4.5. Угловая характеристика реактивной мощности
Зависимость Q = f (θ) при неизменных токе возбуждения I f, напряжении UC и частоте fC сети называют угловой характеристикой реактивной мощности синхронной машины.
Реактивная мощность
. (4.16)
Учитывая, что φ = ψ – θ (рис. 4.5),
(4.17)
Подставив в (4.17) выражения (4.5) поперечного и продольного токов якоря, получим
. (4.18)
Заменяя sin2θ и cos2θ функциями двойного угла, имеем
. (4.19)
В неявнополюсных машинах xd ≈ xq и выражение (4.19) упрощается:
. (4.20)
Первые слагаемые в (4.18)-(4.20) характеризуют реактивную мощность, обусловленную током возбуждения. Члены, входящие в (4.18)-(4.20) с отрицательными знаками, определяют реактивную мощность, потребляемую невозбужденной синхронной машиной для образования результирующего магнитного поля.
Зависимость Q = f (θ) достигает максимума Qm в режиме холостого хода при θ = 0 (рис. 4.10). Если машина перевозбуждена (возбуждена так, что Ef > U ), то Qm > 0 и реактивная мощность отдается в сеть. Если машина недовозбуждена (Ef < U ), то Qm < 0 и машина потребляет реактивную мощность из сети.
Если машина недовозбуждена (Ef < U ), то Qm < 0 и машина потребляет реактивную мощность из сети.
С увеличением механического момента на валу угол θ возрастает, реактивная мощность, отдаваемая машиной в сеть, снижается и при некотором угле нагрузки θ1 становится равной нулю. Дальнейший рост активной нагрузки (θ > θ1) приводит к потреблению реактивной намагничивающей мощности Q из сети.
Это явление можно объяснить с помощью диаграмм МДС (рис. 4.11). При вычерчивании диаграмм падения напряжения на сопротивлениях r и xσ обмотки якоря приняты равными нулю и согласно (3.31) Ėr = U = – UC. Так как UC = const магнитный поток Фr, индуктирующий ЭДС Er, и результирующую МДС машины Fr можно также считать постоянными. Погрешность, вносимая этими допущениями, не превышает обычно 6—15 %.
Погрешность, вносимая этими допущениями, не превышает обычно 6—15 %.
Сплошными линиями на рис. 4.11 изображена диаграмма, соответствующая номинальному режиму работы генератора с θ = θН. Ток якоря İ отстает от напряжения машины U на угол φН > 0. Реактивная мощность Q = QH > 0 и отдается машиной в сеть.
С ростом нагрузки генератора угол θ увеличивается и концы векторов Ff и – Faf на рис. 4.11 перемещаются по дуге окружности с радиусом Ff = const. При этом МДС якоря Faf меняется по величине (за счет увеличения тока якоря при нагрузке) и направлению из-за увеличения угла θ.
Поэтому конец вектора тока İ , совпадающий по направлению с МДС якоря Faf перемещается по линия АВ от В к А с увеличением угла θ (точки 1, 2, 3, 4 на линиях АВ и Ff = const). Угол φ и отдаваемая в сеть реактивная мощность уменьшается.
Угол φ и отдаваемая в сеть реактивная мощность уменьшается.
Точка 3 на диаграмме соответствует работе генератора с углом нагрузки θ1 на рис. 4.10. При этом угол между векторами тока и напряжения φ = 0, машина отдает в сеть активную мощность, реактивная мощность Q = 0.
При дальнейшем увеличении угла θ ток İ опережает напряжение U и реактивная составляющая тока якоря меняет направление. Угол φ и реактивная мощность становятся отрицательными, что равносильно потреблению реактивной мощности из сети (точка 4 на диаграмме рис. 4.11 при угле нагрузки θ4 и участок угловой характеристики ниже оси θ на рис. 4.10).
4.6. Регулирование реактивной мощности.
U (V)-образные характеристики
Пусть синхронный генератор включен в сеть большой мощности на холостом ходу. Ток возбуждения I f отрегулирован так, что магнитный поток Фf индуктирует в обмотке якоря ЭДС Ef = UC, которая уравновешивает напряжение сети (см. рис. 4.12, а). При этом ток якоря I = 0.
рис. 4.12, а). При этом ток якоря I = 0.
С увеличением тока возбуждения возрастут поток Фf и ЭДС Ef (рис. 4.12. б). Появится разность потенциалов между сетью и машиной ΔU = UC + Ėf≠ 0, под действием которой в обмотке якоря появится ток İ, отстающий практически на p/2 от ΔU вследствие практически индуктивного сопротивления обмотки якоря. Этот ток образует продольную размагничивающую МДС якоря Fad, которая уменьшает результирующий магнитный поток Фr, сцепленный с обмоткой якоря, до величины, близкой к прежнему значению при холостом ходе ФfХ (см. рис. 4.12, б). Напряжение машины U станет равно напряжению сети UC.
Вследствие того, что ЭДС якоря Ef > UC, машина перевозбуждена. В этом случае сеть по отношению к машине подобна индуктивной нагрузке, так как вектор тока якоря İ отстает от напряжения машины U на чет- верть периода. Наоборот, по отношению к сети, машина представляет со- бой емкостную нагрузку, генерирующую реактивную мощность (ток якоря İ опережает UC на угол p/2). Поэтому перевозбужденная синхронная машина отдает в сеть реактивную мощность, потребляемую асинхронными двигателями, трансформаторами и другими приемниками для образования их магнитного поля.
В этом случае сеть по отношению к машине подобна индуктивной нагрузке, так как вектор тока якоря İ отстает от напряжения машины U на чет- верть периода. Наоборот, по отношению к сети, машина представляет со- бой емкостную нагрузку, генерирующую реактивную мощность (ток якоря İ опережает UC на угол p/2). Поэтому перевозбужденная синхронная машина отдает в сеть реактивную мощность, потребляемую асинхронными двигателями, трансформаторами и другими приемниками для образования их магнитного поля.
При уменьшении тока возбуждения уменьшается поток Фf и ЭДС Ef будет меньше напряжения сети UC (рис. 4.12, в). Под действием возникшей разности потенциалов ΔU = UC + Ėf≠ 0 в обмотке якоря появится ток İ, отстающий от ΔU на p/2. Он образует продольную намагничивающую МДС якоря Fad, которая усиливает результирующий магнитный поток Фr, сцепленный с обмоткой якоря, до его величины ФfХ при холостом ходе.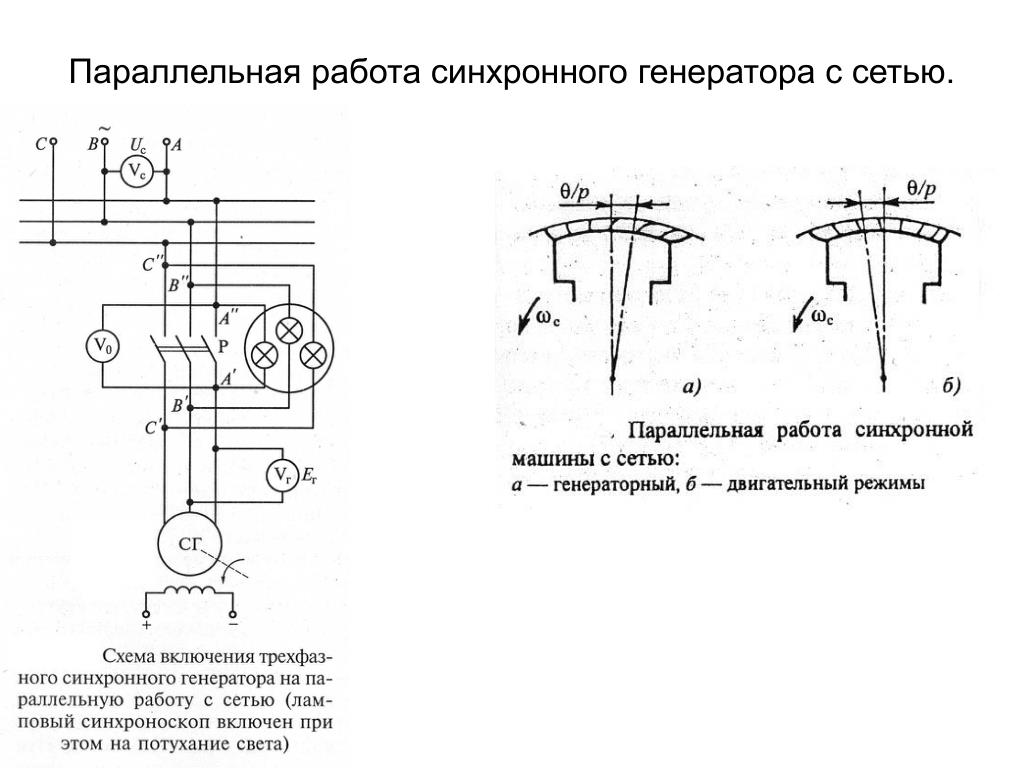 Напряжение машины U станет равно напряжению сети UC.
Напряжение машины U станет равно напряжению сети UC.
Так как Ef < UC, то говорят, что машина недовозбуждена. Вектор тока якоря İ опережает напряжение U на p/2, то есть сеть по отношению к машине представляет емкостную нагрузку. Машина по отношению к сети эквивалентна индуктивной нагрузке, потребляющей реактивную мощность, так как ток якоря İ отстает от напряжения сети на четверть периода. Следовательно, недовозбужденная синхронная машина потребляет из сети реактивную мощность для образования своего магнитного поля.
Активная мощность Р2 = mUI cos φ = 0, так как при изменении тока возбуждения ток якоря чисто реактивный (угол между U и İ на рис. 4.12 равен p/2). Следовательно, изменение тока возбуждения позволяет регулировать только реактивную мощность синхронной машины.
На рис. 4.13 изображены диаграммы напряжений и МДС неявнополюсного генератора, нагруженного активной мощностью Р2 = РН = const: сплошными линиями при работе с cos φ = 1,0; пунктирными при перевозбуждении и точечными линиями при недовозбуждении с одинаковым коэффициентом мощности cos φН. Концы векторов на диаграммах обозначены цифрами 1, 2 и 3 соответственно.
Концы векторов на диаграммах обозначены цифрами 1, 2 и 3 соответственно.
При постоянной мощности Р2 активная составляющая тока якоря
постоянна и конец вектора тока якоря İ при изменении тока возбуждения будет скользить по линии АВ (рис. 4.13). Ток якоря при работе генератора с cos φ = 1,0 (φ = 0) минимален и равен активной составляющей Ia, реактивная составляющая тока якоря IР = 0. Ток возбуждения, обеспечивающий при данной мощности Р2 работу машины с минимальным током якоря I = Ia, называют нормальным (полным) током возбуждения I fП.
Перевозбуждение (I f > I fП) и недовозбуждение (I f < I fП) увеличивает ток якоря I только за счет реактивной составляющей IР (рис. 4.13), оказывающей на магнитное поле машины такое же действие, как и при холостом ходе (Р2 = 0, Ia = 0).
4.13), оказывающей на магнитное поле машины такое же действие, как и при холостом ходе (Р2 = 0, Ia = 0).
Характерно, что даже при значительном изменении тока возбуждения, результирующий магнитный поток Фr, сцепленный с обмоткой якоря, меняется мало. Этому можно дать следующее объяснение. Напряжение машины U = – UC. Из диаграмм напряжений (рис. 3.6-3.10) видно, что ЭДС Er близка по величине к напряжению машины. Если в (3.31) пренебречь падением напряжения на сопротивлениях r и xσ, то можно считать Er ≈ U = UC и при UC = const ЭДС Er также постоянна. В этом случае Фr ≡ Er = UC, то есть величина и характер изменения результирующего магнитного потока Фr определены приложенным к обмотке якоря напряжением сети.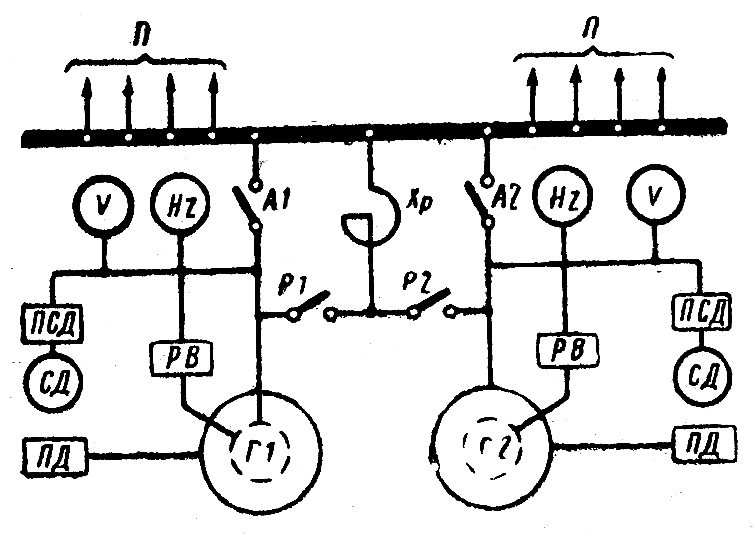
U-образными характеристиками называют зависимости тока якоря I = f ( I f) при постоянных активной мощ-ности P2, напряжении UC и частоте fС сети (рис. 4.14).
Минимумы характеристик соответствуют работе генератора с активным током якоря Ia при cos φ = 1,0. С увеличением активной мощности генератора P2 активная составляющая тока якоря Ia растет и минимумы характеристик смещаются вверх. Одновременно увеличиваются падение напряжения на сопротивлении рассеяния xσ и МДС якоря Fa ≡ I. IIpи неизмененном токе возбуждения угол φ меняется (рис. 4.11) и работа генератора с cos φ = 1,0 невозможна. Чтобы сохранить постоянным cos φ = 1,0, необходимо с ростом Р2 увеличить ток I f и МДС Ff возбуждения для компенсации падения напряжения xσI и действия МДС якоря Fa.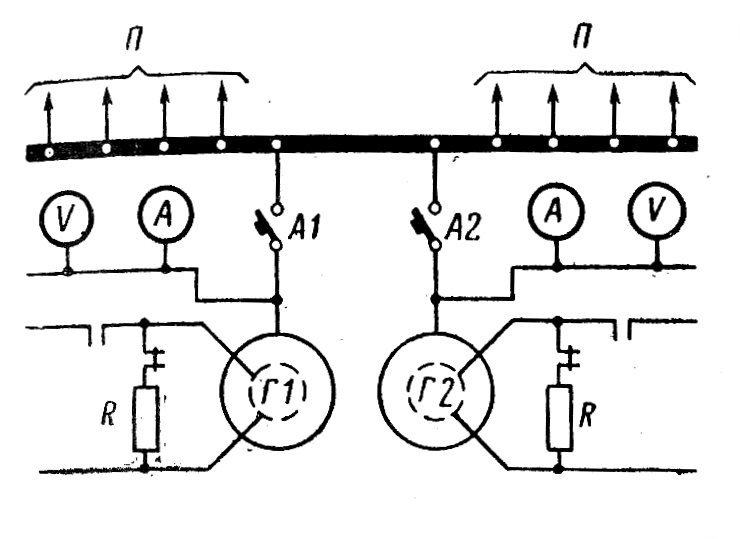 Вследствие этого минимумы характеристик смещаются вправо (рис. 4.14) с увеличением активной нагрузки.
Вследствие этого минимумы характеристик смещаются вправо (рис. 4.14) с увеличением активной нагрузки.
Линия АВ, проходящая через минимумы характеристик, совпадает с pегулировочной характеристикой машины при активной нагрузке (характеристика 1 на рис. 4.14). Минимуму U-образной характеристики соответствует нормальный или полный ток возбуждения I fП (показан только для характеристики с нагрузкой Р2 = 0,5Р2Н).
Справа от линии АВ генератор перевозбужден (φ > 0) и отдает в сеть реактивную мощность, слева – недовозбужден (φ < 0) и потребляет реактивную мощность из сети.
Отрезки АD и АС U-образной характеристики при P = P2 = 0 совпадают с регулировочными характеристиками генератора, работающего с cos φ = 0 на емкостную и индуктивную нагрузки (линия 5 и 3 на рис. 3.18).
Люди также интересуются этой лекцией: 12 Неметаллические включения.
Линия DF характеризует минимальный ток возбуждения, обеспечивающий при заданной активной мощности Р2 устойчивую работу машины. Например, при уменьшении тока возбуждения I f генератора, нагруженного активной мощностью Р2 = 0,5Р2Н (рис. 4.14), его максимальная электромагнитная мощность Pm снижается, а угол нагрузки θ растет. Если I f = If /
(точка K на линии DF), то Pm равна подводимой к валу механической мощности P1 и θ = θm, то есть машина работает на пределе статической устойчивости. Дальнейшее снижение тока возбуждения ( I f < If/ ) приведет к тому, что максимальная мощность Pm станет меньше вращающей мощ-ности на валу P1 и генератор под действием преобладающего вращающего момента выпадет из синхронизма. Поэтому линию DF называют границей статической устойчивости.
К U-образным характеристикам также относят определенные при постоянных мощности Р2, напряжении UС и частоте fС сети зависимости cosφ = f ( I f), вид которых следует из понятия коэффициента мощности
. (4.21)
Зависимости cosφ = f ( I f), достигают максимума (cos φ = 1,0) в точках минимума графиков тока I = Ia (рис. 4.14). Слева и справа от максимума cos φ уменьшается вследствие увеличения реактивной составляющей тока якоря IР при неизменной активной Ia = const (см. выражение 4.21).
Обозначения 1, 2, 3 точек U-образных характеристик при Р2 = Р2Н соответствуют точкам диаграмм на рис. 4.13.
Глава 21. Параллельная работа синхронных генераторов.
На
электрических станциях обычно
устанавливают несколько синхронных
генераторов, включаемых
параллельно для совместной работы (рис.
21.1). Наличие
нескольких генераторов вместо одного
суммарной мощности дает преимущества,
объясняемые теми же соображениями,
которые были изложены применительно
к параллельной работе трансформаторов
(см. § 2.2).
При
включении синхронного генератора в
сеть на
параллельную работу необходимо соблюдать
следующие
условия: ЭДС генератора
в
момент подключения его к сети должна
быть равна и противоположна
по фазе напряжению сети (),частота
ЭДС генератора
должна быть равна частоте
переменного напряжения в сети
;
порядок следования
фаз на выводах генератора должен быть
таким же,
что и на зажимах сети.
Приведение
генератора в состояние, удовлетворяющее
всем указанным условиям, называют
синхронизацией.
Несоблюдение
любого из условий синхронизации
приводит к появлению в обмотке статора
больших уравнительных токов, чрезмерное
значение
которых может явиться причиной аварии.
Включить
генератор в сеть с параллельно работающими
генераторами можно или способом точной
синхронизации,
или способом самосинхронизации
Способ
точной синхронизации. Сущность этого
способа состоит в том, что, прежде чем
включить генератор
в сеть, его приводят в состояние,
удовлетворяющее всем вышеперечисленным
условиям. Момент
соблюдения этих условий, т. е. момент
синхронизации,
определяют прибором, называемым
синхроноскопом.
По
конструкции синхроноскопы разделяют
на стрелочные и ламповые. Рассмотрим
процесс
синхронизации генераторов с применением
лампового
синхроноскопа, который состоит из трех
ламп 1,
2, 3, расположенных
в вершинах равностороннего
треугольника.
При
включении ламп по схеме «на погасание»
(рис. 21.2, а)
момент
синхронизации соответствует одновременному
погасанию всех ламп.
Предположим, что звезда ЭДС генератора
вращается
с угловой частотой
,
превышающей угловую частоту
вращения
звезды
напряжений сети
. В
этом случае напряжение
на лампах определяется геометрической
суммой
+;+;+(рис.
21.2, б).
Рис.
21.1. Включение синхронных генераторов
на параллельную работу:
Г1
—
Г4
– синхронные генераторы, ПД1
-ПД4
—
приводные двигатели
В
момент совпадения
векторов звезды ЭДС
с векторами звезды напряжений
эта сумма достигает
наибольшего значения,
при этом лампы
горят с наибольшим накалом
(напряжение на лампах
равно удвоенному напряжению
сети).
В последующие моменты времени звезда
ЭДС обгоняет
звезду напряжений,
и напряжение на лампах уменьшается. В
момент синхронизации
векторы ЭДС и напряжений занимают
положение, при котором
,
т.е.
=
0, и все три лампы
одновременно гаснут (рис. 21.2, в). При
большой разности угловых
частот
илампы
вспыхивают часто. Изменяя частоту
вращения первичного двигателя, добиваются
равенства
,
очем
будет свидетельствовать
погасание ламп на
длительное время. В этот
момент и следует замкнуть
рубильник, после
чего генератор окажется
подключенным
к сети.
Рис.
21.2. Ламповый синхроноскоп
Способ
самосинхронизации.
Ротор невозбужденного
генератора
приводят во вращение
первичным двигателем
до частоты вращения, отличающейся от
синхронной не более
чем на 2—5%, затем генератор подключают
к сети. Для того чтобы
избежать перенапряжений в обмотке
ротора в момент подключения
генератора к сети, ее замыкают на
некоторое активное Сопротивление. Так
как в момент подключения генератора к
сети его
ЭДС равна нулю (генератор не возбужден),
то под действием напряжения сети в
обмотке статора наблюдается резкий
бросок тока,
превышающий номинальное
значение
тока генератора. Вслед
за включением обмотки статора в сеть
подключают обмотку возбуждения
к источнику постоянного тока и синхронный
генератор под действием электромагнитного
момента, действующего на его
ротор, втягивается в синхронизм, т. е.
частота вращения ротора становится
синхронной. При этом ток статора быстро
уменьшается.
При
самосинхронизации в генераторе протекают
сложные электромеханические переходные
процессы, вызывающие значительные
механические воздействия на обмотки,
подшипники и муфту,
соединяющую генератор с турбиной.
Влияние этих воздействий на надежность
генератора учитывается при проектировании
синхронных
генераторов. Способ самосинхронизации
(грубой синхронизации) обычно применяют
в генераторах при их частых включениях.
Этот способ прост и легко автоматизируется.
Параллельная работа синхронных генераторов | Судовые электрические станции и сети
- Подробности
- Категория: Разное-архив
- генерация
- потребитель
- оборудование
- хранение энергии
- судовое
- сети
Содержание материала
- Судовые электрические станции и сети
- Приемники электроэнергии
- Структура и классификация электроэнергетических систем
- Требования к электрооборудованию
- Параметры электроэнергетических систем
- Генераторные агрегаты
- Генераторы переменного и постоянного тока
- Генераторные установки отбора мощности
- Выбор мощности, числа и типов генераторных агрегатов
- Системы стабилизации напряжения синхронных генераторов
- Принципы постороения систем стабилизации напряжения
- Системы стабилизации с фазовым компаундированием
- Система стабилизации напряжения генераторов ГМС
- Параллельная работа синхронных генераторов
- Параллельная работа генераторов постоянного тока
- Аварийные электростанции
- Кислотные аккумуляторы
- Щелочные аккумуляторы
- Серебряно-цинковые аккумуляторы
- Выбор и размещение аккумуляторов
- Вращающиеся зарядные преобразователи
- Выпрямительные агрегаты
- Генерирование и распределение электроэнергии
- Главные распределительные щиты и пульты управления
- Вторичные распределительные щиты
- Автоматизированные электростанции
- Схемы АДУЭС
- Локальные устройства автоматизации
- Обслуживание ЭС
- Расчеты токов короткого замыкания
- Коммутационная и защитная аппаратура
- Автоматические установочные выключатели
- Автоматические выключатели АК
- Предохранители
- Пакетные выключатели и переключатели
- Реле обратной мощности и тока
- Электроизмерительные приборы
- Схемы распределения электроэнергии и сетей
- Кабели
- Контроль изоляции
- Защита от помех радиоприему
- Электробезопасность обслуживания
- Пожарная безопасность
- Назначение судового освещения
- Основные светотехнические величины судового освещения
- Источники света судового освещения
- Светильники с лампами накаливания судового освещения
- Светильники судового освещения с люминесцентными лампами
- Нормы и методы расчета освещенности
- Сигнально-отличительные огни судового освещения
- Прожекторы и электронагревательные приборы судового освещения
- Обслуживание осветительных установок
- Данные по судовому электрооборудованию
Страница 14 из 53
Глава 5 ПАРАЛЛЕЛЬНАЯ РАБОТА ГЕНЕРАТОРНЫХ АГРЕГАТОВ
§ 15. ПАРАЛЛЕЛЬНАЯ РАБОТА СГ
Электростанция современного судна, как правило, состоит из нескольких генераторных агрегатов, которые могут работать как автономно, так и параллельно.
В первом случае генераторы работают на отдельные, не связанные между собой секции шин ГРЩ, от каждой из которых получает питание определенная группа приемников электроэнергии. Во втором случае к общим шинам ГРЩ подключаются и одновременно работают несколько генераторов, а судовые приемники электроэнергии подключены к общим шинам.
Различают параллельную работу длительную (совместная работа агрегатов в течение срока эксплуатации) и кратковременную (на время перевода нагрузки с одного агрегата на другой).
Параллельная работа генераторных агрегатов имеет следующие достоинства: выгоднейшую нагрузку ГА включением и отключением отдельных агрегатов в эксплуатационных режимах; устойчивость работы генераторного агрегата, снижение колебаний напряжения и частоты судовой сети при изменении нагрузки приемников электроэнергии; перевод приемников с одного генераторного агрегата на другой без перерыва их электроснабжения; повышение экономичности генераторных агрегатов за счет полной нагрузки в эксплуатационных режимах; упрощение схемы ГРЩ электростанции.
Недостатки параллельной работы ГА: значительное увеличение тока короткого замыкания и соответственно повышение требований к разрывным способностям коммутационной и защитной аппаратуры, установленной на ГРЩ, создание более совершенной системы избирательной защиты участков судовой сети при коротких замыканиях и перегрузках.
При режимах параллельной работы генераторных агрегатов переменного тока предъявляют дополнительные требования к системам поддержания частоты вращения первичных двигателей и к CCH генераторов. Возникают сложные вопросы распределения нагрузок на ГА в установившихся и переходных режимах работы, возможен переход генераторов в двигательный режим.
При параллельной работе генераторных агрегатов рассматриваются условия включения и способы пропорционального распределения активных и реактивных нагрузок.
При распределении активных нагрузок генераторных агрегатов изменяется подвод топлива или пара к первичным двигателям и соответственно вращающий момент на валах и частота вращения генераторов. При распределении реактивной нагрузки изменяется ток возбуждения, но сохраняется постоянным вращающий момент.
Рис. 30. Принципиальная схема, схема замещения и векторные диаграммы напряжений и токов при точной синхронизации генераторов
Включение СГ в параллельную работу осуществляется способами точной синхронизации, грубой синхронизации и самосинхронизации.
Генераторы могут работать параллельно в одной электрической системе при одинаковых угловых скоростях роторов и напряжениях на выводах генераторов, близких к номинальному. При изменении режимов активной нагрузки ГА меняются относительные углы сдвига роторов, обусловленных включением и отключением активных нагрузок и короткими замыканиями в судовой сети.
При несоблюдении условий включения в параллельную работу в обмотках генераторов могут возникнуть большие уравнительные токи, а на валах агрегатов — большие механические моменты, способные вывести генераторы из синхронизма.
Синхронизация генераторов требует выполнения следующих основных требований: уравнительный ток в обмотках в первый момент включения должен быть возможно меньшим; после включения генераторы должны оставаться в синхронизме; процесс синхронизации не должен вызывать недопустимых отклонений параметров судовой сети.
Рассмотрим три способа синхронизации, применяемых в судовых ЭС.
Точная синхронизация требует соблюдения следующих условий: равенства амплитудных значений напряжений U1=U2 и частот генераторов f1 = f2; совпадения по фазе напряжений генераторов в момент их включения; соблюдения порядка следования фаз у работающего и подключаемого СГ.
При соблюдении указанных условий точной синхронизации разность напряжения генераторов СГ1 и СГ2 (рис. 30, а) равна нулю, в момент включения генератора СГ2 нет толчков тока и изменения напряжения, т. е. уравнительный ток отсутствует. При несоблюдении условий точной синхронизации в момент включения генератора СГ1 появляются уравнительный ток и колебания напряжения.
Схема замещения при включении СГ в параллельную работу показана на рис. 30, б. Из векторных диаграмм токов и напряжений при различных условиях точной синхронизации генераторов (рис. 30, в—д) видно, что в случае равенства напряжений (U1 = U2) генераторов. СГ1 и СГ2 и неравенства частот (f1\f2) возникает уравнительный ток между статорными обмотками СГ.
Принятые на рисунке и далее обозначения: ПД — приводные двигатели; СД — серводвигатели; В — выключатель; ВГ—выключатели генераторные; ПСС—переключатель синхроноскопа S; Пс д — переключатели серводвигателей сдвинуты на угол 6. При изменении угла б от 0 до 180° геометрическая разность напряжений может изменяться от 0 до 2U. Уравнительный ток в момент включения СГ1 зависит от геометрической разности напряжений. Вектор уравнительного тока сдвинут по фазе от вектора напряжения ДU на 90°, так как активное сопротивление обмотки статора генератора значительно меньше индуктивного. Для СГ с успокоительными обмотками (см. рис. 30, б) амплитудное значение уравнительного тока iy в момент включения определяют по формуле
(12)
где ky — ударный коэффициент, учитывающий апериодическую составляющую тока;
Е»д — э. д. с. СГ за сверхпереходным индуктивным резистором по продольным осям;
X»di, X»d2 — сверхпереходные индуктивные сопротивления генераторов по продольным осям;
Хс—эквивалентное индуктивное сопротивление соединительной цепи СГ;
6 — угол сдвига фаз между э. д. с. Е»,< 4 и 2.
Наибольшее значение уравнительного тока при 6 = 180° и AU=2U
(13)
При одинаковых генераторах, когда X»d\=X»d2=Xd», и малом значении Хс наибольшее значение уравнительного тока составляет
При этом уравнительный ток равен ударному току короткого замыкания одного генератора.
Для приблизительного определения уравнительного тока в выражения (12) — (14) вместо Ed» может быть поставлено U. Значительные уравнительные токи создают большие динамические усилия в элементах СГ. При неблагоприятных условиях включения генераторов уравнительный ток превышает ударный короткого замыкания подключаемого СГ в два раза. Равенство напряжений достигается автоматическим регулированием тока возбуждения генераторов в ССН (см. § 14).
Напряжение СГ контролируют вольтметром, установленным на ГРЩ либо ПУ. Для уравнивания частот СГ регулируют частоту вращения первичного двигателя синхронизируемого генератора (частоту контролируют частотомером). Регуляторы частоты вращения первичных двигателей снабжены электродвигателями небольшой мощности — серводвигателями, которые дистанционно включаются переключателями, установленными на ГРЩ или ПУ. При воздействии серводвигателя СД на систему подачи топлива или пара первичного двигателя ГА изменяется момент на валу генератора и соответственно частота вращения двигателей при раздельной работе или угол сдвига между роторами СГ при параллельной работе. При этом перераспределяются активные нагрузки между ГА. Изменение подачи топлива или пара вызывает смещение статических скоростных характеристик первичных двигателей (мощность зависит от скорости).
Совпадение фаз напряжений генераторов определяют по стрелочному синхроноскопу S, который показывает отношение частот вращения работающего и включенного СГ.
В судовых ЭС синхронизация заменена автоматической, которая исключает возможность несинхронного включения СГ. В автоматизированных судовых ЭС предусматриваются синхронизаторы, уравнивающие напряжения и частоты, контролирующие момент включения СГ при совпадении их напряжений по фазе и производящие автоматическое включение соответствующего выключателя при точной синхронизации.
Грубая синхронизация в отличие от точной не требует точного уравнивания напряжения, частоты и совпадения фаз синхронизируемых генераторов. Включаемый СГ в произвольный момент времени подключается к работающему через реактор, ограничивающий уравнительные токи. Через несколько секунд СГ втягивается в синхронизм, после чего включается выключатель автоматический и реактор R (рис. 31, а) отключается соответствующими контакторами К1 и К2.
При правильно выбранном индуктивном сопротивлении Xv реактора (рис. 31, б) могут включаться в параллельную работу предварительно нагруженные генераторы. Максимальный угол между векторами напряжения генераторов должен быть 180° при скольжении около 3%.
Рис. 31. Принципиальная схема, схема замещения и осциллограмма переходных процессов при грубой синхронизации генераторов
Из осциллограммы грубой синхронизации двух СГ мощностью по 75 кВт, характеризующей переходный процесс при синхронизации (рис. 31, в), видно, что этот процесс сопровождается первоначальными бросками тока и провалами напряжения на шинах ГРЩ с последующими качаниями роторов, колебаниями напряжений и уравнительных токов между генераторами. Период затухающих колебаний равен периоду колебаний тока, протекающего через реактор. При этом колеблется активная мощность СГ, так как генератор, вращающийся с большой частотой, тормозится, а с малин— ускоряется. Переходный процесс при грубой синхронизации заканчивается через 2,2 с.
Снижение напряжения судовой ЭС при самосинхронизации зависит от соотношения мощностей генераторов и угла рассогласования фаз напряжений. При большой мощности синхронизируемого генератора напряжение снижается более резко. Характер и продолжительность снижения напряжения зависят от скольжения подключаемого СГ и быстродействия системы возбуждения. Наибольшее снижение напряжения соответствует включению СГ при углах между осями роторов 180°.
При втягивании СГ в синхронизм напряжение восстанавливается, а ток быстро уменьшается до значения тока холостого хода, который определяется индуктивным сопротивлением. В процессе синхронизации генераторов одинаковой мощности напряжение снижается до 50% номинального, а для генераторов, мощность которых составляет 30—25% мощности ЭС, — до 15—20%. Генераторы различной мощности при самосинхронизации надежно втягиваются в синхронизм. При этом начальный ток статора составляет 2 -4,5 ном, провалы напряжения порядка до 20—40%, время синхронизации до 1—1,5 с при скольжении ±2—3%. Самосинхронизацию можно применять в судовых ЭС, где допускаются значительные снижения напряжения. Однако чаще применяют точную и грубую синхронизацию [9].
- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Архив
- Разное архив
- Судовые электрические станции и сети
Еще по теме:
- Судовые станции и сети
- Судовой электрик
- Судовые электрические станции
- Как батареи за счетчиком могут преобразовать энергосистему?
- Аварии и неисправности в судовых электроустановках
Параллельная работа генераторов переменного тока
Параллельная работа генераторов переменного тока требует соблюдения более сложных условий, чем параллельная работа генераторов постоянного тока.
Для включения синхронного генератора параллельно с другим необходимо:
1) равенство напряжений работающего и подключаемого генераторов;
2) равенство их частот;
3) совпадение порядка чередования фаз;
4) равенство углов сдвига между э. д. с. каждого генератора и напряжением на шинах.
Последнее условие сводится к геометрически одинаковому наложению роторов генераторов относительно обмоток своих статоров.
Процесс приведения генераторов в такое состояние, при котором все перечисленные условия будут выполнены, называется синхронизацией генераторов.
Если генераторы синхронизированы, то включение их на параллельную работу протекает спокойно, без появления в системе каких-либо дополнительных толчков тока. Если хотя бы одно из условий не выдержано, то между генераторами появляются значительные уравнительные токи, которые не позволяют осуществить параллельную работу генераторов, а в некоторых случаях могут даже вызвать их повреждение.
Рассмотрим параллельную работу двух синхронных генераторов.
Если генераторы одинаковы, электродвижущие силы и скорости вращения их равны, то при отсутствии внешней нагрузки (т. е. при холостом ходе) в цепи обмоток статоров генераторов тока не будет, так как э д. с. взаимно уравновешиваются.
Рис. 1. Уравнительный ток
При включении внешней нагрузки оба генератора начнут отдавать одинаковую, мощность. При индуктивной нагрузке напряжение каждого уменьшится на одну и ту же величину, причем между э. д. с. генератора и его напряжением появится некоторый сдвиг, по фазе определяемый углом δ. Мощность, отдаваемая генератором во внешнюю цепь, пропорциональна этому углу.
Предположим, что мы увеличили возбуждение, а следовательно, и э. д. с. первого генератора и уменьшили возбуждение второго так, что общее напряжение генераторов осталось прежним.
Так как мощность, развиваемая первичными двигателями, осталась неизменной, то как общая мощность, так и мощности, отдаваемые каждым из генераторов, также не изменились. Не изменился и ток внешней нагрузки: I — общий и I/2 — для каждого генератора.
Вместе с тем, так как э. д. с. обоих генераторов уже не равны, то между генераторами появится уравнительный ток Iу, протекающий только по цепи генераторов. Распределение токов в этом случае показано на рис. 1.
Как видим, ток в первом генераторе будет равен геометрической сумме токов внешней нагрузки I/2 и уравнительного Iу, а во втором — геометрической их разности.
Индуктивные сопротивления обмоток статоров генераторов значительно больше их активных сопротивлений. В связи с этим уравнительный ток будет отставать от разности э. д. с. генераторов почти на 90°.
При этом условии при сложении токов в первом генераторе и вычитании их во втором результирующий ток будет отставать от напряжения в каждом генераторе на различный угол.
Иными словами, каждый из генераторов будет работать при своем коэффициенте мощности, отличном от коэффициента мощности внешней сети. Если активная мощность, потребляемая внешней нагрузкой, близка к суммарной мощности обоих генераторов, то у перевозбужденного генератора действующий ток превысит номинальный ток генератора, чего допускать нельзя (перегрузка по току).
Отсюда следует, что при параллельной работе синхронных генераторов необходимо стремиться к тому, чтобы все генераторы работали с одним и тем же коэффициентом мощности, равным коэффициенту мощности сети.
Предположим теперь, что не изменяя возбуждения воздействием на регулятор первичного двигателя первого генератора, мы увеличили ему подачу топлива. В этом случае первичный двигатель разовьет увеличенный вращающий момент, под влиянием которого ротор первого генератора забежит вперед относительно ротора второго генератора, вращаясь в дальнейшем с прежней синхронной скоростью. Вследствие расхождения по фазе электродвижущих сил генераторов в их цепи возникнет разность э. д. с., под влиянием которой появится уравнительный ток.
Но уравнительный ток по своей фазе будет почти совпадать с э. д. с. первого генератора, т. е. явится для него током нагрузки, и будет почти противоположным э. д. с. второго генератора (будет уменьшать его нагрузку). В этом случае каждый из генераторов будет нести нагрузку, пропорциональную вращающему моменту, развиваемую его первичным двигателем.
При этом полюса более нагруженного генератора будут в пространстве находиться впереди полюсов менее нагруженного. Последнее обстоятельство равносильно тому, что у более нагруженного генератора угол сдвига фаз между э. д. с. и напряжением δ1 больше, чем у менее нагруженного δ2.
Следует отметить, что параллельная работа синхронных генераторов проходит устойчиво только при определенных значениях угла δ. Наиболее устойчива она при угле δ, равном 0°, что соответствует холостой работе генераторов; при угле, равном 90°, генератор выпадает из синхронизма и параллельная работа становится невозможной.
Неизменность угла δ зависит от постоянства скорости вращения первичного двигателя. При колебании скорости вращения вследствие изменения нагрузки или по каким-либо другим причинам угол δ может измениться до недопустимой величины. Поэтому надежность и устойчивость параллельной работы синхронных генераторов в значительной мере зависит от качества работы регуляторов оборотов первичных двигателей.
Необходимое для перераспределения нагрузок генераторов дистанционное управление подачей топлива первичным двигателям обеспечивается применением регуляторов с серводвигателем или с электромагнитным приводом клапанов подачи топлива. При включении напряжения серводвигатель или соленоид открывает клапан подачи топлива или пара. Степень открытия клапана, а следовательно, и количество подаваемого топлива регулируется продолжительностью включения серводвигателя или числом включенных соленоидов.
Рис. 2. Уравнительное соединение между обмотками возбуждения генераторов
Это же устройство служит и для изменения скорости вращения генераторов при их синхронизации.
Рис. 3. Уравнительное соединение в цепях схемы регулирования напряжения
У синхронных генераторов с самовозбуждением и саморегулированием напряжения величина тока возбуждения, зависит от тока в цепи статора. В свою очередь при параллельной работе синхронных генераторов изменение тока возбуждения генератора влияет на величину его реактивного тока. Отсюда вытекает, что при параллельной работе синхронных генераторов с самовозбуждением и саморегулированием напряжения необходимо принимать специальные меры для обеспечения правильного распределения реактивного тока между ними.
В качестве такого мероприятия у генераторов одинаковой мощности предусматривают уравнительное соединение между их обмотками возбуждения (на стороне постоянного тока), как это изображено на рис. 2.
При замыкании автоматов генераторов подается ток на катушки контакторов К1 и К2, подключающих обмотки возбуждения к уравнительным шинам.
В результате параллельного соединения обмоток возбуждения любое изменение возбуждения одного генератора отражается и на величине возбуждения второго. Поэтому распределение реактивного тока между ними сохраняется правильным.
При параллельной работе генераторов разной мощности, уравнительное соединение выполняется в цепях схемы регулирования напряжения на стороне переменного тока (рис. 3).
Электрические машины.
Параллельная работа синхронных генераторов
Параллельная работа генераторов на сегодняшний день является наиболее распространенной формой работы.
Генераторы могут работать параллельно в небольших масштабах, например. два или три генератора работают
параллельно для обеспечения электроэнергией удаленного сообщества или большого масштаба, например. энергосистема Северной Америки
Преимущества параллельной работы включают
- Резервирование: выход из строя одного блока не влияет на целостность электроснабжения, генераторов
может быть выведен из эксплуатации для профилактического обслуживания - Масштабирование: многие блоки могут объединяться для обеспечения потребности в электроэнергии, вместо того, чтобы требовать меньше очень больших генераторов
- Управление ресурсами: генераторы можно размещать и эксплуатировать так, чтобы они наилучшим образом соответствовали условиям производства, вместо
размещать и эксплуатировать в соответствии с требованиями местной нагрузки. Примером этого может быть атомная электростанция, которая
Примером этого может быть атомная электростанция, которая
может потребоваться много недель, чтобы довести его до полного рабочего состояния. Использование атомной электростанции на полной мощности для
удовлетворить «базовую нагрузку» с помощью генераторов меньшего размера с более быстрым откликом — это один из способов обеспечить требования к изменяющейся нагрузке. - Эффективность: Генераторы, работающие при полной нагрузке, более эффективны, чем генераторы, работающие при низкой нагрузке. Это больше
эффективно справляться с изменяющейся нагрузкой, добавляя или удаляя генераторы меньшего размера, чем работая с одним большим генератором
неэффективно.
Рис. 1. Пример схемы из трех генераторов, работающих параллельно для питания нагрузки
Изменение напряжения и частоты
Связь V-Q
При рассмотрении синхронных генераторов, работающих отдельно, становится ясно, что напряжение на клеммах машины зависит от реактивной мощности, подаваемой на нагрузку. При подаче большей реактивной мощности номинальное напряжение падает. В целом, влияние изменений напряжения на клеммах при реактивной нагрузке можно изобразить, как показано на рисунке. Увеличение индуктивной нагрузки на генератор снижает напряжение на клеммах, увеличивая емкость.
увеличивает напряжение на клеммах. Снижение напряжения на клеммах можно компенсировать увеличением холостого хода.
напряжение \(Е\)
Рис. 2. Изменение напряжения генератора в зависимости от реактивной мощности
f-P Связь
Выходная мощность генератора в значительной степени не зависит от фактического управления генератором. Выходная мощность почти соответствует входной мощности первичного двигателя. Скорость вращения генератора также задается первичным двигателем, при этом частота наведенного напряжения холостого хода напрямую определяется скоростью вращения:
\[
f=\frac{p}{120}n_s
\]
Чтобы понять соотношение частоты и мощности, важно попробовать
понять механическую систему, которая приводит в действие генератор. На холостом ходу механическая система
вращается со скоростью холостого хода \(n_{nl}\) и приводит к генерации
напряжения на частоте холостого хода \(n_{fl}\).
Когда генератор загружен, питание поступает от механической системы и
генератор прикладывает крутящий момент, который противоположен направлению движения механической системы. Как результат,
генератор имеет тенденцию замедлять механическую систему. (Точно так же, как когда вы едете по
ровной дороге и потом начинаешь подниматься в горку, машина тормозит).
В синхронном генераторе изменение механической скорости нежелательно, т.к.
изменение частоты индуцированных напряжений. По этой причине к механическому
система, чтобы сделать изменение скорости предсказуемым с изменением мощности. Механический регулятор устанавливает холостой ход.
скорость и регулирует снижение скорости так, чтобы соотношение скорости и мощности было линейным. Эта зависимость показана на рис. 3.
Важно подчеркнуть, что это функция не генератора, а
как управляется механическая система.
Рис. 3. Изменение частоты генератора в зависимости от выходной мощности
Если частота генерируемых напряжений слишком низкая, частоту можно увеличить на
увеличение скорости холостого хода механического регулятора (эквивалентно круиз-контролю в автомобиле, увеличивающему подачу газа в двигатель, когда автомобиль поднимается в гору).
Математически изменения частоты под нагрузкой описываются двумя величинами:
Падение скорости \({SD}\) и наклон графика мощность-частота, \(S_p\) .
Падение скорости, \({SD}\) определяется как
\[
\begin{выровнено}
SD & = \frac{n_{nl}-n_{fl}}{n_{fl}} \times 100\% \\
& = \frac{f_{nl}-f_{fl}}{f_{fl}} \times 100\%
\end{выровнено}
\]
Типичные значения падения скорости находятся в диапазоне 2% — 4%
Мощность генератора можно узнать с помощью
\[
P=S_p\влево(f_{nl}-f_{sys}\вправо)
\]
где
\[
S_p=\frac{\Delta P}{\Delta f} =\frac{P_{fl}}{f_{nl}-f_{nl}}
\]
Крутизна \(S_p\) часто указывается в кВт/Гц или МВт/Гц.
В приведенных выше уравнениях нижние индексы \(nl, fl \) относятся к холостому ходу и
при полной нагрузке соответственно, а \({sys}\) относится к частоте операционной системы.
Бесконечный автобус
Бесконечный автобус — это полезная концепция, которая резюмирует то, как большинство людей уже
посмотреть электросеть. Его можно применять, когда энергосистема достаточно велика, чтобы действие
любого пользователя или генератора не повлияет на работу энергосистемы.
В бесконечной шине:
- Частота системы постоянна, не зависит от потока мощности
- Напряжение системы постоянно, независимо от потребляемой или отдаваемой реактивной мощности
Бесконечная шина, используемая во многих небольших электрических приложениях. В качестве примера,
принимаем за данность, что напряжение питания в жилой розетке будет 120В и 60Гц:
напряжение и частота не меняются при включении телевизора.
Графики частоты-мощности и напряжения-реактивной мощности для бесконечной шины
показано на рис. 4.
Рис. 4. Графики f-P и V-Q для бесконечной шины
Параллельная работа синхронного генератора
Привет, друзья, надеюсь, у вас все хорошо. В сегодняшнем уроке мы рассмотрим Параллельная работа синхронного генератора. В настоящее время в электрической системе редко когда какой-либо синхронный генератор обеспечивает питание своих нагрузок в одиночку. В определенных условиях, например, если где-то питание отключено от сети, то для обеспечения питания нагрузки можно использовать один генератор, но его обычный генератор не работает один. В нормальном рабочем состоянии всегда параллельно работает более одного генератора. Примером этой системы является энергосистема Соединенных Штатов Америки, где более тысячи генераторов обеспечивают питание нагрузки в системе.
В сегодняшнем посте мы рассмотрим, как работает генератор параллельно, его особенности, подключения и некоторые другие условия. Итак, давайте начнем с параллельной работы синхронного генератора .
Параллельная работа синхронного генератора
- Перед изучением параллельной работы генераторов сначала обсудим преимущества параллельной работы. Которые описаны здесь.
Преимущество параллельной работы синхронного генератора
- Более одного генератора могут обеспечивать питание большей нагрузки.
- Большое количество генераторов в системе повышает стабильность системы, в некоторых случаях, если один генератор не работает, это не повлияет на общую нагрузку, что может произойти в случае одного генератора.
- Если в системе работает более одного генератора и нам нужно кого-то починить из системы, мы можем легко удалить его и можем починить. Другие продолжат подавать питание на нагрузку.
- Если в системе есть один генератор с более высокой номинальной мощностью, и он не обеспечивает питание нагрузки в номинальном состоянии, это нехорошо для системы. Вместо этого, если мы используем много генераторов меньшей номинальной мощности, и лишь немногие из них работают и обеспечивают питание нагрузки в номинальных условиях. Таким образом, для системы будет полезно использовать более одного генератора с меньшим номиналом, чем один генератор с более высоким номиналом.
Условия параллельной работы синхронного генератора
- На приведенной выше схеме видно, что два генератора подключены параллельно. Первый генератор G 1 подает электроэнергию на выход со вторым генератором G 2 , который соединен с первым переключателем S
- Если мы случайно замкнем переключатель в любое время и подключим эти генераторы, это может привести к серьезной аварии как для генератора, так и для нагрузки.
- И напряжение на клеммах обоих генераторов не одинаковое, оно будет производить такой большой ток, что повредит генераторы.
- Чтобы исключить эту ситуацию, все три фазы обоих генераторов должны быть на одном уровне напряжения и иметь одинаковые фазовые углы.
- Это означает, что фаза a имеет такой же уровень напряжения, что и фаза a’, фаза b равна фазе b’, а c равна c’.
- Чтобы получить такое же соответствие фаз, мы должны выполнить некоторые условия, описанные здесь.
- Среднеквадратичное значение напряжения этих двух генераторов должно быть одинаковым.
- Последовательность фаз обоих генераторов должна быть одинаковой, что означает, что a соединен с a’ другого генератора, b с b’ и c с c’.
- Фазовый угол двух одинаковых фаз должен быть равен. Означает, что (а) фазы обоих генераторов имеют одинаковый угол и так далее.
- Частота подключаемого генератора, также называемого текущим генератором , должна быть немного выше, чем у уже находящегося в рабочем состоянии генератора.
- Теперь мы подробно объясним эти 4 условия.
Условие 1 и 3:
- Для того, чтобы на клеммах обоих генераторов были одинаковые напряжения, должны быть одинаковые значения среднеквадратичного напряжения и их фазового угла, которые описаны в условии 3. Напряжение на фазах а и а ‘ будет оставаться таким же во время работы, если они будут следовать условиям один и три.
Условие 2:
Подключаемые фазы имеют одинаковую последовательность фаз.
- Если последовательность фаз не одинакова (как показано на данной диаграмме) или одна фаза, подобная (а), соединена с той же фазой, но другие 2 фазы не соединены должным образом с аналогичными фазами.
- Если эти 2 генератора имеют такую последовательность, то ничего не произойдет на фазе а, так как она подключена правильно, но на других 2 фазах b, c произойдет такое короткое замыкание, которое повредит оба генератора.
- Чтобы решить эту проблему, измените только положение 2 фаз на любом генераторе из трех фаз.
Условие 4:
- Если частота работающего генератора ненамного выше частоты работающего генератора, будет производиться огромное количество переходного тока, пока частоты обоих генераторов не сравняются.
- Частоты этих двух генераторов должны быть почти равными, но не совсем одинаковыми, что означает, что текущая частота генератора должна быть немного выше, чем у другого генератора.
- Должна быть некоторая разница между частотами двух генераторов, чтобы фазовый угол входящего генератора изменялся в соответствии с фазовым углом работающего генератора.
- С помощью этого метода можно наблюдать углы между напряжениями и замыкать S 1 , когда оба генератора имеют одинаковое значение напряжения.
Процедура параллельного подключения генераторов
- На данной схеме показаны генераторы G1 и G2, вы можете видеть, что G1 уже подключен к нагрузке, а G2 должен быть подключен к системе.
- Чтобы подключить генератор G2, мы должны выполнить следующие действия.
- Сначала мы должны отрегулировать напряжение генератора G2 равным системному. Для этого контролируют напряжение этого генератора по вольтметру и устанавливают равным системному.
- 2 nd предназначен для проверки последовательности фаз G2 и ее согласования с частотой системы. Существует множество методов проверки последовательности фаз, некоторые из которых описаны здесь.
- Первый способ заключается в подключении асинхронных двигателей малой мощности к обоим генераторам один за другим и соблюдении направления их вращения.
- Если направление вращения одинаково для обоих генераторов, то последовательность одинакова.
- Если направление вращения двигателей не одинаковое, последовательность фаз неодинакова, для одинаковой последовательности просто измените соединение двух фаз входящего генератора.
Метод трех лампочек для проверки чередования фаз
- Существует еще один метод проверки чередования фаз генератора.
- В этом методе есть 3 лампочки, подключенные к разомкнутым клеммам входящего генератора с выключателями, которые соединяют его с системой. это показано на заданной схеме.
- Если есть разница в последовательности фаз, то лампочка светится (значит большая разница фаз), затем темнеет (меньшая разница фаз).
- Если эти 3 лампочки загораются и гаснут одновременно, то оба генератора подключены к одним и тем же фазам.
- Если лампочки не горят одновременно или горят по одной, то будут подключены разные фазы, для решения этой проблемы нужно изменить одну из последовательностей.
- Другим моментом для параллельной работы является то, что частота входящего генератора должна быть немного выше частоты работающего генератора.
- Значение частоты устанавливается частотомером, затем измеряется по изменению фазы (разнице).
- Частота поступающего генератора должна быть немного выше частоты системы, чтобы при подключении к системе он работал как генератор, а не как двигатель.
- Когда частоты рабочего и входящего генератора почти одинаковы, 2 генератора будут постепенно изменять фазу в соответствии друг с другом,
- Различия в фазе обнаруживаются, и когда углы фаз одинаковы, переключатель, соединяющий оба генератора, замыкается.
Как узнать, когда 2 генератора находятся в фазе?
- Самый простой способ — наблюдать за тремя лампочками, которые подключены к схеме, как показано на рисунке выше.
- Когда все три лампочки горят одновременно, разности фаз нет и фазы соединяются в одинаковой последовательности.
- Этот метод работает, но имеет некоторые ограничения, иногда работает неточно.
- Для проверки последовательности фаз можно использовать другой метод, это использование
- Это прибор, который вычисляет разность фаз между (а) фазами генераторов.
- На данной схеме виден синхроноскоп.
- Вы можете увидеть стрелку на измерителе, которая будет указывать фазы, если она находится на нуле и на один восемьдесят градусов, чем напряжения в фазах.
- Как мы выяснили ранее, частота обоих генераторов различна, поэтому угол фаз будет меняться на измерителе постепенно.
- Если частота входящего генератора выше частоты работающего генератора (что в нашем случае), то угол фазы сдвинется и стрелка (стрелка) на измерителе будет двигаться по часовой стрелке.
- Если частота поступающего генератора меньше частоты работающего генератора, стрелка измерителя будет двигаться против часовой стрелки.
- Когда стрелка измерителя находится в положении 0 градусов или 180 0 , это означает, что последовательность фаз такая же, поэтому мы можем замкнуть переключатель, чтобы установить контакт между генераторами.
- Вы можете заметить, что этот счетчик показывает только одну фазу, которую мы обсуждали. Он не говорит о последовательности фаз.
- Для генераторов большой мощности, подключаемых в энергосистему, параллельная работа входящего генератора осуществляется компьютером, синхроноскоп для таких систем не используется.
Вы также можете ознакомиться с некоторыми темами, связанными с синхронным генератором, которые перечислены здесь.
Введение в синхронный генератор
Эквивалентная схема синхронного генератора
Векторная диаграмма синхронного генератора
Мощность и крутящий момент синхронного генератора
Параметры синхронного генератора
Синхронный генератор, работающий в одиночку
Синхронный генератор Параллель с большим энергосистемой
Параллель синхронного генератора
Синхронный генератор. полная статья о параллельной работе синхронного генератора, если вы хотите узнать что-то еще, можете спросить в комментариях. Увидимся в следующем уроке «Синхронные генераторы параллельно с большими энергосистемами».
Новое прибытие для алюминиевых плат, только 2 долл. США
$ 54 купоны также могут применяться к 3D -печать, для 3 -й печать, он начинается с 1
9plize. Генератор с сеткой (энергосистема) | Параллельная работа синхронных генераторов
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
При включении синхронного генератора мы сталкиваемся с необходимостью запараллелить его с остальной энергосистемой. Рисунок 1 иллюстрирует проблему.
Условия синхронизации генератора с сетью (энергосистема)
После того, как генератор заработает, мы хотели бы замкнуть переключатель, чтобы подключить его к энергосистеме. Тогда вопрос в том, какие условия должны присутствовать, прежде чем переключатель можно будет замкнуть?
Немного поразмыслив, можно получить следующие четыре коэффициента:
- Величины напряжения генератора и шины должны совпадать.
- Частота напряжения генератора и шины должна совпадать.
- Последовательность фаз трех фаз генератора и шины должна быть одинаковой.
- Напряжения генератора и шины должны быть в фазе.
Очевидно, что если какой-либо из этих четырех факторов не соответствует действительности, на разомкнутых клеммах переключателя может быть напряжение. Замыкание переключателя приведет к практически нулевому импедансу в цепи, что приведет к чрезвычайно высоким токам.
Последовательность фаз особенно важна. Если генератор производит последовательность ABC, а шина работает с последовательностью CBA, то замыкание переключателя создает вращающееся магнитное поле, противодействующее вращению машины. Когда ротор вращается в направлении, противоположном магнитному полю статора, создаются чрезвычайно высокие пульсирующие моменты, и были случаи, когда вал машины фактически ломался из-за этих высоких тормозных моментов.
Очевидно, мы хотели бы иметь указание на отсутствие напряжения на полюсах трехфазного переключателя на рисунке 1 до того, как мы замкнем переключатель.
К счастью, есть несколько ручных методов, которые использовались в течение многих лет, а также современные автоматические электронные устройства, которые позволяют безопасно включать синхронные генераторы параллельно.
РИСУНОК 1: Проблема синхронизации генератора с энергосистемой.
Метод с тремя лампочками
В методе с тремя лампочками на каждый полюс трехфазного переключателя, соединяющего генератор с энергосистемой, помещается лампочка, как показано на рис. 2(a).
Цель состоит в том, чтобы замкнуть выключатель, когда все огни погаснут, так как это будет означать, что на каждом полюсе переключателя почти нулевое напряжение.
Рассмотрим каждый из четырех перечисленных нами критериев. Если генератор и автобус работают на значительном уровне различные уровни напряжения или если они разделены постоянным фазовым углом, то все три полюса выключателя будут находиться под напряжением, и все три лампочки будут гореть все время.
Если генератор и шина имеют разных частот , то векторные напряжения будут вращаться с разными скоростями. Рисунок 2 (b) показывает два набора фазовых напряжений. В какой-то момент два набора совпадут по фазе друг с другом, и лампочки погаснут, но затем они будут смещаться по фазе из-за разных скоростей вращения. Таким образом, если шина и генератор имеют одинаковую последовательность фаз, как показано на рисунке, лампочки будут загораться и гаснуть одновременно.
С другой стороны, если последовательности фаз различны, как показано на рисунке 2(c), то только одна из фаз может быть в фазе в любой момент времени. Таким образом, огни будут гаснуть последовательно, по одному. Обратите внимание, что лампочки будут темными в течение периода времени, когда напряжение слишком низкое, чтобы их зажечь, но не равно нулю.
РИСУНОК 2: Метод с тремя лампочками для синхронизации генератора с бесконечной шиной.
- Схема.
- Векторные диаграммы напряжения генератора и шины с одинаковым чередованием фаз.
- Векторные диаграммы напряжения генератора и шины с противоположным чередованием фаз.
Чтобы правильно запараллелить генератор с использованием метода трех ламп, генератор должен быть разогнан до нескольких оборотов в минуту выше синхронной скорости, а возбуждение должно быть отрегулировано так, чтобы напряжения на двух сторонах переключателя были примерно равными.
Если чередование фаз правильное , то лампочки должны одновременно светиться и гаснуть. Когда генератор работает всего на несколько оборотов в минуту выше синхронной, время цикла включения и выключения ламп должно составлять от пяти до десяти секунд. Если это так, то переключатель может быть замкнут в середине темного цикла, и генератор синхронизируется с бесконечной шиной.
Если последовательность фаз неверна , лампочки будут гаснуть по одной. В этом случае следует отключить генератор и поменять местами два его соединения с выключателем. Затем процесс можно повторить.
«Обратите внимание, что важно, чтобы генератор работал немного выше синхронной скорости. Таким образом, когда переключатель замкнут, генератор должен немного замедлиться, а значит, подавать питание на шину. Если бы машина работала со скоростью ниже синхронной, она должна была бы увеличить скорость, когда переключатель был замкнут, что потребовало бы, чтобы она потребляла энергию от шины, превращая ее в двигатель».
Лампы накаливания должны иметь номинальное напряжение, в два раза превышающее фазное напряжение, так как напряжения могут смещаться по фазе на 180°. Очевидно, что в системах с более высоким напряжением это может быть проблемой. Чтобы решить эту проблему, можно использовать трансформаторы.
Метод трех ламп с трансформаторами
Трансформаторы можно использовать для снижения напряжения, воспринимаемого лампами, как показано на рис. 3(a). Работа системы идентична трехламповому методу. Здесь используются два трансформатора с открытым треугольником.
У одного банка с открытым треугольником верхняя сторона подключена между линиями шины, а у другой — высокая сторона подключена к выходу генератора. Низкие стороны двух рядов соединены с лампочками, как показано на рисунке.
Одна из проблем метода трех лампочек заключается в том, что он не дает указания, на какой стороне частота выше. Изменяя соединения, можно получить эту информацию.
РИСУНОК 3: Метод трех ламп с использованием трансформаторов.
- Схема.
- Соединение «открытый треугольник».
Метод двух светлых и одной темной
Вариант метода с тремя лампами, обеспечивающий получение информации о частоте, показан на рис. 4.
Здесь две внешние фазы соединены перекрестно. Когда система и генератор правильно сфазированы, средняя лампочка темная, а внешние яркие. Если частоты разные, лампочки будут мигать последовательно, а направление мигания говорит о высокой или низкой скорости генератора.
Преимущество этой методики заключается в том, что выключатель можно замкнуть, когда две внешние лампочки работают на максимуме (при одинаковой яркости). Так как легче определить максимальную яркость, чем середину темного периода, это позволяет оператору замыкать переключатель, когда система и генератор более близки по фазе. Другой способ определения относительной частоты или фазового угла — с помощью синхроноскопа.
РИСУНОК 4: Метод синхронизации с двумя яркими и одним темным.
Синхроноскоп
Синхроноскоп — это устройство, которое показывает мгновенный угол между двумя напряжениями одной и той же частоты или показывает разницу частот между ними, если они не совпадают.
Рис. 5 представляет собой чертеж измерителя фазового угла/синхроскопа. Очевидно, что если частоты разные, то угол между напряжениями постоянно меняется, а значит, стрелка будет вращаться.
Генератор будет подключен к левым клеммам, а шина — к правой (для понижения напряжения могут потребоваться трансформаторы). Если частота генератора слишком высока, стрелка будет вращаться по часовой стрелке; если оно слишком низкое, игла вращается против часовой стрелки.
РИСУНОК 5: Иллюстрация измерителя фазового угла/синхроскопа.
Вы нашли apk для андроида? Вы можете найти новые бесплатные игры и приложения для Android.
Параллельная работа синхронного генератора
Мы уже знаем, что синхронная машина подключена к бесконечным шинам. Будет рассмотрена параллельная работа синхронного генератора с двумя конечными размерами, что является способом использования генераторов больших практических размеров. В энергосистеме генераторы подключены к узлам сети, состоящей из сети трансформаторов и линий электропередач. Сеть национального уровня может включать даже сотни генераторов и сотни километров линии электропередачи. Формирование сети продиктовано соображениями надежности (непрерывность поставок), инвестиционной и эксплуатационной экономикой электростанции.
Параллельная работа синхронного генератора На рис. 8.62 показаны два синхронных генератора вместе с их первичными двигателями, работающими параллельно. После того, как два генератора доведены до соответствующих синхронных скоростей и их токи возбуждения отрегулированы так, чтобы обеспечить почти равные напряжения на клеммах, переключатель S замыкается в соответствии с процедурой синхронизации. Активная и реактивная мощности, подаваемые на общую нагрузку каждым генератором, регулируются соответственно дросселями их первичных двигателей и токами возбуждения.
Распределение активной мощности между параллельно включенными генераторами зависит от падения характеристик частоты (скорости) мощности первичных двигателей и их регуляторов. Эти характеристики почти линейны для небольших изменений рабочей (номинальной) частоты и мощности, как показано на рис. 8.63. Эти характеристики можно сдвигать вверх или вниз путем регулировки уставок их регуляторов. Падающие частотно-мощные характеристики необходимы для правильной нагрузки между генераторами и их регулировки.
Для характеристик, показанных сплошной линией на рис. 8.63, нагрузка P L = AB на частоте f (номинальная) делится как P 1 и P 2 так, что P 1 + P 2 = P L . Чтобы увеличить нагрузку на G 2 и соответственно уменьшить нагрузку на G 1 , частотно-мощная характеристика G 2 должна быть повышена путем регулировки настройки регулятора, а для поддержания постоянной частоты характеристика Г 1 должны быть одновременно опущены. Из рисунка видно, что при такой корректировке P L = P′ 1 + P′ 2 где (P 1 — P’ 1 ) = (P’ 2 — P 2 ) = ΔP, величина нагрузки, которая передается от G 1 к G 2 путем регулировки регуляторов. Из этого также следует, что если изменить настройку регулятора только одного из первичных двигателей, частота системы изменится. В процессе настройки регулятора в системе происходят переходные процессы с частотой нагрузки, которые вскоре исчезнут (при условии, что регуляторы должным образом демпфированы), и установится устойчивый режим частоты нагрузки с новым распределением нагрузки.
Изменения возбуждения при параллельной работе синхронного генератора влияют на нагрузку на клеммах по напряжению и реактивной мощности, при этом распределение активной мощности остается неизменным (настройки первичного регулятора не нарушаются). Это было выяснено в отношении одной машины, подключенной к бесконечным шинам. Для системы из двух генераторов, показанной на рис. 8.62, предположим, что два генератора идентичны, их регуляторы первичных двигателей настроены на равное распределение нагрузки при параллельной работе синхронного генератора и их возбуждения равны; чтобы они работали с одинаковыми токами и коэффициентами мощности (т. е. активная и реактивная мощности распределялись поровну). Векторная диаграмма при этих режимах работы, одинаковая для каждого генератора, показана на рис. 8.64 жирной линией.
KVAR Управление параллельными синхронными генераторами:
Для заданной общей нагрузки и равного распределения реальной нагрузки, пусть возбуждение G 1 теперь увеличивается, а возбуждение G 2 одновременно уменьшается таким образом, как чтобы напряжение на клеммах не менялось. Таким образом, каждый генератор ведет себя так, как если бы он был подключен к бесконечным шинам, т. е. E f sin δ останется постоянным. При фиксированной активной мощности каждого генератора (половина общей) проекция тока генератора (каждого) на V t (активная составляющая тока) также останется постоянной, в результате чего коэффициент мощности G 1 уменьшится, а G 2 улучшится (рисунок приведен для upf).
Таким образом, G 1 подает больше кВАР на нагрузку, а G 2 поставляет на такое же количество меньше. Таким образом можно управлять распределением реактивной нагрузки между генераторами. Если, однако, возбуждение только одного из генераторов будет повышено (или понижено), напряжение на клеммах увеличится (или уменьшится), пока этот генератор разделяет большую (или меньшую) часть кВАр нагрузки. Для повышения (понижения) напряжения на клеммах без изменения распределения кВАР возбуждение обоих генераторов должно быть повышено (или понижено).
Возбуждение автоматически регулируется регуляторами напряжения, воздействующими на цепи возбуждения генераторов. Все, что необходимо сделать, это изменить уставки регуляторов напряжения.
Вышеприведенное предполагается, что контуры управления регулятором первичного двигателя и регулятором напряжения генератора независимы. Однако они слабо связаны из-за потерь в генераторах. Независимость контуров управления является хорошим рабочим предположением.
▷ Параллельность генераторов и синхронизация
Всем привет, наш коллега-электрик А.Н. в очередной раз балует нас хорошей статьей. Ознакомьтесь с его материалами ниже:
Параллельное подключение генераторов увеличивает мощность, контроль при управлении нагрузкой, простоту обслуживания и резервирование. Процесс включает физическое соединение двух или более электрических генераторов и синхронизацию их выходов.
Синхронизация сопоставляет форму выходного напряжения одного генератора с формой волны напряжения другого генератора(ов).
Факторы, учитываемые при параллельном подключении генераторов
Мощность : простая синхронизация системы в зависимости от нагрузки; включение устройства при увеличении спроса и отключение устройства при снижении спроса.
Резервирование : обеспечение мягкой передачи мощности при отключении исходящего генератора и включении входящего. Конструкция должна исключать ситуацию, когда нагрузка не получает питания или не может работать от ИБП.
Соответствие с электрическими стандартами безопасности, защиты и эксплуатации.
Рис. 1: Базовое подключение параллельно соединенных генераторов | image: people.ucalgary.ca
Требования к параллельному соединению генераторов
В идеале любой тип генератора может быть включен параллельно с другим типом, если их частота и напряжение одинаковы в точке соединения. Однако существуют некоторые практические ограничения, такие как несовместимость между более старыми и новыми моделями или когда затраты на обеспечение их совместимости неоправданны.
Следует учитывать следующие моменты;
- Контроль скорости: Генераторы могут иметь одинаковую или разную скорость двигателя, но должны быть привязаны к конечной скорости системы.
- Баланс нагрузки: Вся нагрузка должна распределяться между всеми генераторами в соответствии с мощностью отдельных блоков.
- Синхронизация: Синхронизация необходима, чтобы гарантировать, что результирующий выходной сигнал находится в фазе, имеет одинаковую частоту и напряжение, следовательно, совместим с нагрузкой.
- Регулятор напряжения
Совместимые генераторы
Самый простой подход — использовать аналогичные генераторы или, по крайней мере, комплекты с одинаковым шагом генератора, выходным напряжением и частотой. Генераторы считаются совместимыми, если они обладают некоторыми общими свойствами, такими как совместимые генераторы переменного тока, двигатели, скорости, элементы управления распределением нагрузки, интерфейсы с другими системами управления и мониторинга и т. д. Помимо проблем с совместимостью, есть и другие проблемы на системном уровне, связанные с размерами.
Если размеры совпадают, система способна поддерживать нагрузку с более высоким приоритетом в случае чрезвычайной ситуации. Однако, если размеры (в кВт) различны, максимальная приоритетная нагрузка ограничивается наименьшим генератором; в противном случае более высокая нагрузка приведет к перегрузке генератора, если не будет предотвращено его включение. В таких ситуациях управление довольно сложное и может потребовать изменения последовательности операций. Кроме того, становится затруднительным ручное управление, а также устранение режимов отказа.
Конструкция должна обеспечивать отключение в первую очередь более крупных нагрузок в случае выхода из строя более мощного генератора; это гарантирует, что меньший генератор останется с нагрузкой, которую он может выдержать.
Синхронизация параллельно подключенных генераторов
Это процесс, при котором напряжение и частота генераторов согласовываются для обеспечения стандартной формы выходного сигнала переменного тока.
Для правильного запараллеливания и синхронизации генераторов каждый из комплектов должен иметь следующие характеристики:
- Частота: частоты должны быть одинаковыми
- Напряжение: Генераторы должны вырабатывать или быть настроены на выработку одинакового напряжения
- Номер фазы: две системы должны иметь одинаковое количество фаз, три или одну фазу.
- Чередование фаз: Для трехфазных систем каждая из трех фаз должна совпадать. Это предотвращает чрезмерные механические и электрические нагрузки, а также позволяет избежать скачков напряжения.
- Напряжение Фазовый угол: формы сигналов должны быть согласованы таким образом, чтобы они поднимались и опускались вместе. Не должно быть разницы углов и разность потенциалов между фазами должна быть равна нулю.
Рис. 2: Согласование фазового угла | image: cpower. com
Преимущества систем с параллельным генератором
Повышенная надежность и резервирование : Повышение надежности и резервирования как для критических, так и для некритических нагрузок. Система обеспечивает постоянную подачу питания на критические нагрузки, а в случае отказа одного из генераторов нагрузка питается от другого одного или нескольких параллельных блоков.
Низкая стоимость производства электроэнергии : Стоимость производства увеличивается с размером генератора и больше для двигателей мощностью более 600 кВт. Это связано с тем, что рынок двигателей меньшего размера выше, следовательно, больше производителей, что приводит к снижению стоимости. Использование нескольких небольших генераторов становится более экономичным, чем использование одного большого генератора.
Снижение легкой нагрузки на первичный двигатель генератора : В большинстве установок нагрузка время от времени меняется, и обычно генератор работает на 30% своей мощности при низкой нагрузке. Это может привести к влажной укладке. КПД первичного двигателя обычно выше, когда нагрузка составляет от 75% до 100%, а малая нагрузка означает, что работа генератора неэффективна. Использование генератора меньшего размера повышает эффективность и, следовательно, снижает затраты.
Больше контроля и экономии на затратах на производство : Суммарная мощность, вырабатываемая несколькими небольшими генераторами, равна мощности, вырабатываемой одним большим блоком. Однако в генераторах меньшего размера больше контроля и балансировки. Можно сбалансировать нагрузку по различным цепям и решить, какая мощность будет генерироваться в любой конкретный момент времени в зависимости от нагрузки.
- Параллельная система может обеспечить огромную экономию, когда все генераторы работают с нагрузкой выше 75% от их номинальной нагрузки. Это точка, в которой генераторы используют минимальное количество топлива.
Расширяемость и гибкость : Использование нескольких генераторов позволяет обеспечивать различную нагрузку без накопления дорогостоящих единиц или слишком больших затрат на большой генератор, полная мощность которого редко используется. Генераторы могут добавляться постепенно по мере увеличения спроса.
Заключение
Установка параллельных генераторов — сложная процедура, требующая квалифицированного специалиста-электрика.
Хорошо спроектированная система обеспечивает резервное питание и переменную мощность. Использование правильного распределительного устройства с параллельным включением помогает потребителю достичь максимальной мощности, когда потребность в мощности находится на пике, обеспечивая при этом минимальную мощность, когда требования к нагрузке низкие.
Спасибо за внимание,
А.Н.
И все! Эта статья помогла? Что еще можно добавить по этой теме?
Синхронный генератор | bartleby
Что такое синхронный генератор?
По сравнению с асинхронным генератором это машина, в которой скорость вращения ротора равна вращающемуся магнитному полю, создаваемому статором, т. е. механическая скорость равна электрической скорости, поэтому называется синхронной, а не асинхронной.
Это машина с двойным возбуждением, которая производит переменное напряжение и ток. Поскольку эта машина является самой громоздкой из всех электрических машин, на статоре размещена обмотка якоря, а на роторе — обмотка возбуждения.
CC Attribution-Share Alike 4.0 Международный | https://commons.wikimedia.org| Эрик Денг
Почему большая часть электроэнергии вырабатывается с помощью синхронного генератора?
Синхронный генератор может выдавать активную и реактивную мощность. Если он выдает реактивную мощность, она может быть поглощена нагрузкой. Асинхронные генераторы этого не делают.
Мы также можем контролировать коэффициент мощности синхронного генератора, управляя возбуждением магнитного поля, что невозможно для асинхронного генератора.
Синхронный генератор вырабатывает мощность на фиксированной частоте, поскольку синусоиды разных частот ортогональны друг другу и передают нулевые потери мощности.
Структура синхронного генератора
Конструкция статора изготовлена из CRGO (холоднокатаной ориентированной по зерну) стали и ламинирована для уменьшения потерь на вихревые токи. Он состоит из короткого шага и распределенной обмотки. Преимущество распределенной намотки в том, что вес распределяется равномерно. Преимущество короткого шага заключается в том, что доминирующие гармоники можно устранить, выбрав подходящее значение угла хорды. Поскольку длина катушки уменьшается, ее сопротивление и реактивность также уменьшаются, что приводит к уменьшению падения напряжения, что улучшает регулирование напряжения.
Конструкция ротора в основном бывает двух типов: ротор с явно выраженными полюсами и ротор с неявнополюсными
Ротор с явно выраженными полюсами синхронного генератора также известен как ротор с выступающими полюсами. Здесь полюса проецируются по периферии ротора. Воздушный зазор по периферии ротора неравномерный. Он может иметь максимум 120 полюсов. Поскольку вес распределен неравномерно, возникают центробежные силы, которые неравномерны и могут повредить ротор. Таким образом, этот тип ротора вращается с низкой скоростью, чтобы предотвратить механический дисбаланс. Эти роторы используются на гидроэлектростанциях.
Неявнополюсный ротор также известен как цилиндрический ротор. По периметру ротора имеется равномерный воздушный зазор. Он намотан только на два или четыре полюса и хорошо сбалансирован механически, поэтому его можно вращать на более высоких скоростях.
Отмечено как общественное достояние | https://picryl.com| Tekniskamuseet
Принцип работы синхронного генератора
Якорная обмотка синхронного генератора питается трехфазным переменным током, а обмотка возбуждения питается от источника постоянного тока.
Обмотка возбуждения постоянного тока создает ЭДС поля (электродвижущая сила), которая взаимодействует с ЭДС якоря для получения трехфазной мощности, т. е. трехфазного тока и напряжения.
Трехфазное высокое напряжение, генерируемое в обмотке якоря, не нужно выводить во внешнюю цепь через токосъемные кольца и скользящие контакты, но можно сделать прямое подключение к клеммам. По сравнению с асинхронным генератором низкое напряжение подается на поле через токосъемные кольца.
Синхронная скорость – это преобразование электрической частоты в механическую скорость в оборотах в минуту.
Ns=120fP
Здесь Ns — синхронная скорость, f — частота, а P — количество полюсов.
Уравнение ЭДС синхронного генератора:
Erms=4,44fϕNs
Здесь f — частота, ϕ — поток на полюс, а Ns — синхронная скорость.
При вращении ротор перерезает проводник статора и наводит ЭДС, уравновешенную в трехфазной обмотке статора. Если статор питает нагрузку, эта ЭДС вызывает уравновешенный ток в обмотке статора. Этот ток создает rmf (вращающееся магнитное поле), которое вращается с синхронной скоростью.
CC Attribution-Share Alike 3.0 Unported | https://commons.wikimedia.org|Давец
Методы устранения гармоник в синхронном генераторе
На стороне поля,
- с использованием явно выраженных полюсов со скошенными углами.
- наклон полюса поля для синусоидального изменения длины проводника.
- за счет увеличения воздушного зазора и сопротивления.
Со стороны якоря,
- короткой обмоткой.
- с использованием распределенной обмотки.
Регулирование напряжения в синхронном генераторе
Регулирование напряжения является важным параметром для синхронного генератора, поскольку более высокое регулирование напряжения означает более высокое синхронное сопротивление. Знание значения синхронного импеданса имеет решающее значение для определения распределения мощности при параллельной работе. Если нагрузка отключена или подключена от синхронного генератора, мы должны знать величину нарастания или падения напряжения соответственно.
Кроме того, он используется для разработки AVR (автоматического регулятора напряжения), системы автоматического управления, используемой для регулирования тока возбуждения.
Параллельная работа синхронного генератора
Параллельная работа генераторов переменного тока — это когда несколько генераторов переменного тока подключены параллельно для удовлетворения огромного спроса на мощность, поскольку один генератор переменного тока не может обеспечить такое количество энергии.
Предположим, мы заменяем один большой блок большим количеством маленьких блоков. В этом случае, по мере снижения нагрузки, мы можем отключить определенные агрегаты и использовать только некоторые агрегаты, чтобы работающие агрегаты работали с полной нагрузкой, а другие агрегаты были выключены, что снижает эксплуатационные расходы.
Параллельно соединив тепловую и гидроэлектростанцию, мы можем поставлять электроэнергию с минимальными затратами, позволяя гидроэлектростанции справляться с максимальной нагрузкой в сезон дождей, а теплоэлектростанции справляться с максимальной нагрузкой в летний сезон.
Для синхронизации нового генератора переменного тока с сетью или существующих параллельно подключенных генераторов переменного тока используются следующие различные методы:
- Метод темной лампы
- Метод двух ярких и одной темной лампы
- Метод синхроноскопа
Что произойдет, если первичный двигатель или турбина соединены с генератором переменного тока и включено возбуждение?
Если возбуждение отключено, но турбина все еще соединена с генератором, электрическая мощность генератора уменьшается.
Если первичный двигатель отсоединен, но возбуждение присутствует, генератор переменного тока будет работать как синхронный двигатель с бесконечной шиной.
Если клеммы генератора подключить к нагрузке вместо бесконечной шины, то через какое-то время первичный двигатель отсоединится, нагрузка не будет подавать электроэнергию, и двигатель постепенно остановится.
Использование синхронного генератора
Ниже приведены некоторые важные области применения синхронного генератора:
- Он используется на электростанциях из-за отсутствия потерь мощности.
- Используется везде, где требуется стабильность.
- Используется для поддержания коэффициента мощности сети.
- Помогает обеспечить постоянное напряжение в течение длительного времени.
Распространенные ошибки
Помните, что используются только 50 Гц и 60 Гц, потому что в энергосистеме турбина обычно дает больший КПД при 3000 об/мин или 3600 об/мин (рассчитывается по приведенной выше формуле), и в соответствии с этим , подходят частоты 50 Гц и 60 Гц.
Обратите внимание, что существуют ограничения по размеру генератора переменного тока.
Контекст и приложения
В каждом из экспертных экзаменов для бакалавров и аспирантов эта тема в основном используется в следующем контексте:
- Бакалавр технологии на факультете электротехники и электроники
- Бакалавр наук в области физики
- Магистр физики
- Трансформаторы
- Катушка индуктивности и индуктивность
- Конденсатор
Практические задачи
Q1. Для работы синхронного генератора требуется _____________.
- Переменный ток
- Постоянный ток
- Как переменный, так и постоянный ток
- Нет
Правильный вариант: (c)
ток Пояснение: переменный ток.
Q2. Возбуждение, подаваемое на синхронный генератор, имеет форму _____________.
- Тепловая энергия
- Гидроэнергия
- Атомная энергия
- Тепловая, гидро- и атомная энергия
Правильный вариант: (d)
который может быть в форме7 возбуждения пара6 генерируются с использованием тепловой, гидро- и ядерной энергии.
Q3. Что из следующего не учитывается для синхронности синхронных генераторов?
- Ток
- Напряжение
- Частота
- Фаза
Правильный вариант: (a)
Объяснение: Напряжение, частота и фаза являются необходимыми условиями для обеспечения синхронизма.
Q4. Что из следующего не является методом устранения гармоник в генераторе?
- Скошенный полюсный башмак
- Полюса с косым полем
- Уменьшение воздушного зазора и сопротивления
- Использование катушек с коротким шагом
Правильный вариант: (c)
Объяснение: Гармоники можно устранить, увеличив воздушный зазор и сопротивление, а не уменьшая их. С другой стороны, уменьшение воздушного зазора обеспечивает лучший постоянный ток в машинах постоянного тока.
Q5. 4-полюсный генератор имеет возбуждение, поэтому он вращается со скоростью 1500 об/мин.
 У этой секции также есть отверстие, предназначенное для слива масла, которое закрыто с помощью такой же пробки 24. В третьей секции между зубчатыми колесами четвертой 34 и третьей 32 передач стоит зубчатое колесо 33 привода спидометра. К передней части картера коробки прикрепляется картер сцепления, к задней части — задняя крышка 1.
У этой секции также есть отверстие, предназначенное для слива масла, которое закрыто с помощью такой же пробки 24. В третьей секции между зубчатыми колесами четвертой 34 и третьей 32 передач стоит зубчатое колесо 33 привода спидометра. К передней части картера коробки прикрепляется картер сцепления, к задней части — задняя крышка 1.
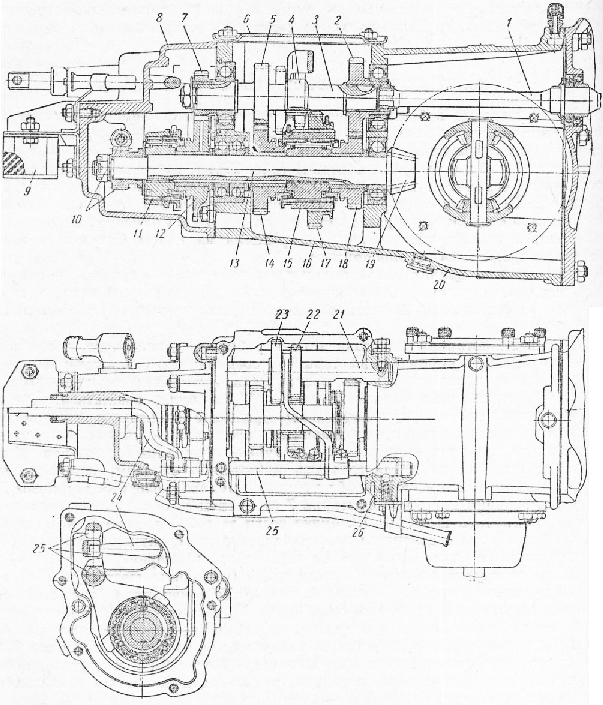



 .RS, RNA 49..2RS
.RS, RNA 49..2RS .RS, NA 49.. 2RS
.RS, NA 49.. 2RS .PP, KRV, KRV..PP, NUKR, KRE, KRE..PP, KRVE, KRVE..PP, NUKRE
.PP, KRV, KRV..PP, NUKR, KRE, KRE..PP, KRVE, KRVE..PP, NUKRE .CP
.CP ..ES
..ES .RB
.RB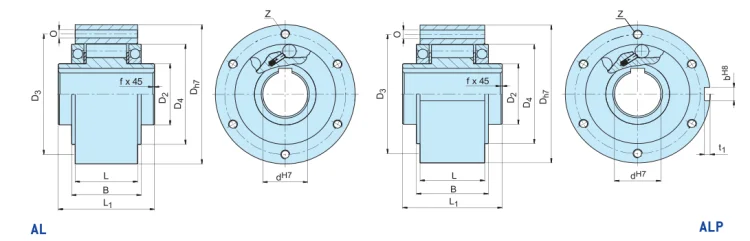 .BB-E
.BB-E .R
.R .E/ES
.E/ES A.C.
A.C. При этом не требуется никаких приводов управления. Классический пример использования – велосипедный привод.
При этом не требуется никаких приводов управления. Классический пример использования – велосипедный привод. д.
д. При этом существуют исполнения муфт свободного хода, которые обеспечивают суммирование несколько вращений в различном направлении и с различной скоростью. Функциональные возможности муфты свободного хода определяют область ее применения. В настоящее время для автоматического включения и отключения привода при изменяющихся условиях его работы муфты свободного хода применяются практически во всех областях техники и особенно в машиностроении. Существуют следующие виды муфт свободного хода: фрикционные, храповые, кулачковые и специальные. Кроме того муфты свободного хода могут применяться вместе с другими видами муфт, в том числе, соединительными, предохранительными и сцепными. К фрикционным муфтам свободного хода относятся следующие виды муфт: роликовые, шариковые и клиновые (эксцентриковые) муфты. Наибольшее распространение, прежде всего, по причине своей простоты и надежности, получили роликовые муфты свободного хода, которые делятся на следующие типы: одностороннего действия, двустороннего действия, реверсивные муфты.
При этом существуют исполнения муфт свободного хода, которые обеспечивают суммирование несколько вращений в различном направлении и с различной скоростью. Функциональные возможности муфты свободного хода определяют область ее применения. В настоящее время для автоматического включения и отключения привода при изменяющихся условиях его работы муфты свободного хода применяются практически во всех областях техники и особенно в машиностроении. Существуют следующие виды муфт свободного хода: фрикционные, храповые, кулачковые и специальные. Кроме того муфты свободного хода могут применяться вместе с другими видами муфт, в том числе, соединительными, предохранительными и сцепными. К фрикционным муфтам свободного хода относятся следующие виды муфт: роликовые, шариковые и клиновые (эксцентриковые) муфты. Наибольшее распространение, прежде всего, по причине своей простоты и надежности, получили роликовые муфты свободного хода, которые делятся на следующие типы: одностороннего действия, двустороннего действия, реверсивные муфты. 0 (150 л.с.), 4х2, МКПП, Kombi длин. база
0 (150 л.с.), 4х2, МКПП, Kombi длин. база база
база »
»
 Достигается это благодаря технологии выдерживания стали после штамповки, цинкованию деталей и использованию смесей для повышения сцепления лакокрасочного покрытия с поверхностью металла.
Достигается это благодаря технологии выдерживания стали после штамповки, цинкованию деталей и использованию смесей для повышения сцепления лакокрасочного покрытия с поверхностью металла.



 Это увеличивает безопасность в техническом плане и исключает факторы, отвлекающие водителя от дороги. Первый пассажирский ряд кресел поворачивается вокруг своей оси, образуя салон купейного типа. Между ними предусмотрен складной подвижной столик рядом с подстаканников. Кресла регулируются вперед-назад. Задний ряд раскладывается, образуя место для сна.
Это увеличивает безопасность в техническом плане и исключает факторы, отвлекающие водителя от дороги. Первый пассажирский ряд кресел поворачивается вокруг своей оси, образуя салон купейного типа. Между ними предусмотрен складной подвижной столик рядом с подстаканников. Кресла регулируются вперед-назад. Задний ряд раскладывается, образуя место для сна. Сегодня приобрести такую технику можно только на вторичном рынке, но и там, благодаря отменному качеству, стоимость на эти машины держится в диапазоне 1,5-15 тысяч долларов. Самые редкие модификации — кемпинговые. Они выпускались ограниченным тиражом, поэтому и стоимость на них достаточно высока. Цена на последние модели VW Т6 в полной комплектации класса «премиум» доходит до 120 тысяч евро.
Сегодня приобрести такую технику можно только на вторичном рынке, но и там, благодаря отменному качеству, стоимость на эти машины держится в диапазоне 1,5-15 тысяч долларов. Самые редкие модификации — кемпинговые. Они выпускались ограниченным тиражом, поэтому и стоимость на них достаточно высока. Цена на последние модели VW Т6 в полной комплектации класса «премиум» доходит до 120 тысяч евро. від 2530$
від 2530$ км
км 09.2022
09.2022 09.2022
09.2022 Бензин Ручна / Механіка
Бензин Ручна / Механіка Дизель Інша
Дизель Інша Ручна / Механіка 2.5 л.
Ручна / Механіка 2.5 л. Інша 1.9 л.
Інша 1.9 л. Газ/бензин
Газ/бензин в Запоріжжя
в Запоріжжя в Луцьку
в Луцьку в Сумах
в Сумах в Черкасах
в Черкасах
 2.5 літра
2.5 літра 1992 року
1992 року 1998 року
1998 року

 Переход на низкорамные шасси позволил выпустить версии,ранее не предусмотренные типажом семейства Transporter, например, шасси с кабиной для монтажа различных спецкузовов. Качественно возрос уровень пассивной безопасности: ведь при полукапотной
Переход на низкорамные шасси позволил выпустить версии,ранее не предусмотренные типажом семейства Transporter, например, шасси с кабиной для монтажа различных спецкузовов. Качественно возрос уровень пассивной безопасности: ведь при полукапотной  Но автомобиль все же не идеален — в поворотах микроавтобус и фургон довольно сильно кренятся, а вот бортовые грузовики подвержены этому в меньшей степени благодаря меньшей высоте центра тяжести. Просторный салон позволяет сравнительно свободно перемещаться по нему даже в движении. В зависимости от длины колесной базы и планировки 8-местного салона объем багажника варьируется от 540 до 1320 л. На фургонах и грузопассажирских версиях Kombi задняя дверь выполнена двустворчатой распашной, а на микроавтобусах — подъемной с газовыми амортизаторами. О продуманности конструкции говорит и такой факт, как освещение входной подножки сдвижной двери. Оснащение пассажирских версий близко к легковым моделям, например, имеется центральная блокировка замков дверей.На Volkswagen Transporter/ Caravelle T4 устанавливали 2,0-литровую «четверку» (AAC) или 2,5-литровую «пятерку» (AAF), а на утилитарный Transporter не слишком мощные и тяговитые, но шумные и вибронагруженные атмосферные дизели: 1,9-литровую «четверку» (1Х) и 2,4-литровую «пятерку» (ААВ).
Но автомобиль все же не идеален — в поворотах микроавтобус и фургон довольно сильно кренятся, а вот бортовые грузовики подвержены этому в меньшей степени благодаря меньшей высоте центра тяжести. Просторный салон позволяет сравнительно свободно перемещаться по нему даже в движении. В зависимости от длины колесной базы и планировки 8-местного салона объем багажника варьируется от 540 до 1320 л. На фургонах и грузопассажирских версиях Kombi задняя дверь выполнена двустворчатой распашной, а на микроавтобусах — подъемной с газовыми амортизаторами. О продуманности конструкции говорит и такой факт, как освещение входной подножки сдвижной двери. Оснащение пассажирских версий близко к легковым моделям, например, имеется центральная блокировка замков дверей.На Volkswagen Transporter/ Caravelle T4 устанавливали 2,0-литровую «четверку» (AAC) или 2,5-литровую «пятерку» (AAF), а на утилитарный Transporter не слишком мощные и тяговитые, но шумные и вибронагруженные атмосферные дизели: 1,9-литровую «четверку» (1Х) и 2,4-литровую «пятерку» (ААВ). После 1991 года была значительно увеличена мощность систем обогрева и вентиляции. Для тех, кому надо нужно много ездить по скользким дорогам, рекомендуем обратить внимание на полноприводную версию Syncro, выпускаемую с 1991 года (грузовик с такой трансмиссией появился только в августе 1992-го). Для настоящего бездорожья эта модель не предназначена, причем надо учитывать, что автоматическое подключение заднего моста через межосевую вискомуфту не отличается оперативностью (система первого поколения), а и при интенсивной эксплуатации быстро выходит из строя.
После 1991 года была значительно увеличена мощность систем обогрева и вентиляции. Для тех, кому надо нужно много ездить по скользким дорогам, рекомендуем обратить внимание на полноприводную версию Syncro, выпускаемую с 1991 года (грузовик с такой трансмиссией появился только в августе 1992-го). Для настоящего бездорожья эта модель не предназначена, причем надо учитывать, что автоматическое подключение заднего моста через межосевую вискомуфту не отличается оперативностью (система первого поколения), а и при интенсивной эксплуатации быстро выходит из строя.  Число главной передачи может меняться: 4,94 для 4-цилиндровых моделей и 4,61 для 5-цилиндровых.
Число главной передачи может меняться: 4,94 для 4-цилиндровых моделей и 4,61 для 5-цилиндровых.  Производство модели было завершено в 2003 году, но она до сих пор ездит по дорогам по всему миру. Учитывая легендарное немецкое качество, машина еще долго будет в эксплуатации.
Производство модели было завершено в 2003 году, но она до сих пор ездит по дорогам по всему миру. Учитывая легендарное немецкое качество, машина еще долго будет в эксплуатации.

 Сиденья водителя во многих модификациях отделены от пассажирских, что позволяет ослабить силу удара со стороны элементов моторного отсека и усиленных вставок боковых стоек. С места водителя открывается отличный обзор, панель приборов эргономична, все органы управления находятся в пределах досягаемости.
Сиденья водителя во многих модификациях отделены от пассажирских, что позволяет ослабить силу удара со стороны элементов моторного отсека и усиленных вставок боковых стоек. С места водителя открывается отличный обзор, панель приборов эргономична, все органы управления находятся в пределах досягаемости.


 9, 2.4, 2.5 дизель и бензин
9, 2.4, 2.5 дизель и бензин Модель 1995 года, мотор 2.5 бензиновый. Неплохо едет, хорошо держится на мокрой дороге, на слякоти. Дизель не брал лишь потому, что частенько холодно и могут возникать проблемы. Расход топлива не пугает, ведь автомобиль неприхотлив — спокойно работает на 92ом и даже на 86ом. Расход по городу составляет 13-14 литров по городу и 10 литров на шоссе.
Модель 1995 года, мотор 2.5 бензиновый. Неплохо едет, хорошо держится на мокрой дороге, на слякоти. Дизель не брал лишь потому, что частенько холодно и могут возникать проблемы. Расход топлива не пугает, ведь автомобиль неприхотлив — спокойно работает на 92ом и даже на 86ом. Расход по городу составляет 13-14 литров по городу и 10 литров на шоссе. Езжу 10 лет, поэтому не трудно понять, что автомобилем доволен на все 100. Расход топлива дизеля небольшой – в городе в пределах 10 литров, а в среднем составляет 8.5 литра на сотку.
Езжу 10 лет, поэтому не трудно понять, что автомобилем доволен на все 100. Расход топлива дизеля небольшой – в городе в пределах 10 литров, а в среднем составляет 8.5 литра на сотку. К линейке дизельный моторов добавился двигатель с объемом 2.5 литра. Вариации остальных силовых установок не изменялись до 2012 года, им добавили немного мощности и появился 3.2-литровый в максимальной комплектации. Средний расход топлива: от 7.3 до 13.3 л на 100 км.
К линейке дизельный моторов добавился двигатель с объемом 2.5 литра. Вариации остальных силовых установок не изменялись до 2012 года, им добавили немного мощности и появился 3.2-литровый в максимальной комплектации. Средний расход топлива: от 7.3 до 13.3 л на 100 км. Средний расход составляет 8.3 литра.
Средний расход составляет 8.3 литра. По всем этим показателям можно поставить 5+. Расход топлива в среднем составляет 7 литров, по городу показатель больше 8 литров не поднимался.
По всем этим показателям можно поставить 5+. Расход топлива в среднем составляет 7 литров, по городу показатель больше 8 литров не поднимался. США ниже рынка
США ниже рынка Вслед за первой моделью Volkswagen, Type 1 (Beetle), ему было присвоено заводское обозначение Type 2. подняться до передового контроля конкурентов в Соединенных Штатах в 1960-х годах, включая Ford Econoline, Dodge A100 и Chevrolet Corvair 9.5 Corvan, последний адаптировал конфигурацию заднего двигателя автомобиля Corvair таким же образом, как VW Type 2 адаптировал компоновку Type 1.
Вслед за первой моделью Volkswagen, Type 1 (Beetle), ему было присвоено заводское обозначение Type 2. подняться до передового контроля конкурентов в Соединенных Штатах в 1960-х годах, включая Ford Econoline, Dodge A100 и Chevrolet Corvair 9.5 Corvan, последний адаптировал конфигурацию заднего двигателя автомобиля Corvair таким же образом, как VW Type 2 адаптировал компоновку Type 1. [4] Это (после закрытия в 2002 году его преемника T3 в Южной Африке) ознаменовало конец эры производства автомобилей Volkswagen с задним расположением двигателя, которые возникли в 1935 со своими прототипами Type 1.
[4] Это (после закрытия в 2002 году его преемника T3 в Южной Африке) ознаменовало конец эры производства автомобилей Volkswagen с задним расположением двигателя, которые возникли в 1935 со своими прототипами Type 1. По мере увеличения габаритных размеров колесной ниши аэродинамическое сопротивление и подъемная сила колеса возрастают. Это связано с увеличением объема турбулентного, перемешиваемого при вращении колеса, завихренного воздуха.
По мере увеличения габаритных размеров колесной ниши аэродинамическое сопротивление и подъемная сила колеса возрастают. Это связано с увеличением объема турбулентного, перемешиваемого при вращении колеса, завихренного воздуха. 07, а с колесами — 0.18, т.е. С, возрос в 2,5 раза. Ориентировочно можно принимать, что колеса увеличивают аэродинамическое сопротивление легкового автомобиля примерно на 0,054-0,06. Увеличение аэродинамического сопротивления автомобиля создается главным образом передними колесами, особенно это проявляется при косом натекании потока, практически выравнивающих наружные поверхности колес и кузова. По данным фирмы «Пининфарина» (Италия), исследовавшей колпаки на 14 автомобилях, в среднем наличие колпаков снижает коэффициент С, на 0,009.
07, а с колесами — 0.18, т.е. С, возрос в 2,5 раза. Ориентировочно можно принимать, что колеса увеличивают аэродинамическое сопротивление легкового автомобиля примерно на 0,054-0,06. Увеличение аэродинамического сопротивления автомобиля создается главным образом передними колесами, особенно это проявляется при косом натекании потока, практически выравнивающих наружные поверхности колес и кузова. По данным фирмы «Пининфарина» (Италия), исследовавшей колпаки на 14 автомобилях, в среднем наличие колпаков снижает коэффициент С, на 0,009. Однако при проектировании перспективных транспортных средств важно располагать возможностью расчетного определения аэродинамического сопротивления колесного движителя при различном конструктивном исполнении колес с шинами и способе установки их относительно кузова. К числу основных конструктивных и установочных факторов, влияющих на аэродинамику колеса и транспортного средства в целом, следует отнести тип и конструкцию колеса и шины, их габаритные размеры, способ установки относительно кузова, характер расположения в колесной нише.
Однако при проектировании перспективных транспортных средств важно располагать возможностью расчетного определения аэродинамического сопротивления колесного движителя при различном конструктивном исполнении колес с шинами и способе установки их относительно кузова. К числу основных конструктивных и установочных факторов, влияющих на аэродинамику колеса и транспортного средства в целом, следует отнести тип и конструкцию колеса и шины, их габаритные размеры, способ установки относительно кузова, характер расположения в колесной нише. Заметное влияние на аэродинамическое сопротивление колес оказывает место их расположения по длине подднищевой зоны, поскольку при этом происходит существенное уменьшение скорости воздушного потока по мере приближения его к кормовой части транспортного средства. На аэродинамическое сопротивление колес, установленных друг за другом, влияет» и степень затенения их впереди стоящими колесами.
Заметное влияние на аэродинамическое сопротивление колес оказывает место их расположения по длине подднищевой зоны, поскольку при этом происходит существенное уменьшение скорости воздушного потока по мере приближения его к кормовой части транспортного средства. На аэродинамическое сопротивление колес, установленных друг за другом, влияет» и степень затенения их впереди стоящими колесами. д., вводятся поправки, учитывающие изменение коэффициента трения соответствующих поверхностей от относительной шероховатости.
д., вводятся поправки, учитывающие изменение коэффициента трения соответствующих поверхностей от относительной шероховатости.
 При этом необходимо учитывать, что регулировать ходовую часть следует только после проведённого ремонта, или возникновения проблем в этой ходовой части.
При этом необходимо учитывать, что регулировать ходовую часть следует только после проведённого ремонта, или возникновения проблем в этой ходовой части.

 Если она направлена вправо вперёд, то угол называется отрицательным.
Если она направлена вправо вперёд, то угол называется отрицательным.

 Благодаря поперечному наклону оси поворота при повороте управляемых колёс кузов автомобиля приподнимается, вследствие чего возникают силы, стремящиеся вернуть колесо в прямолинейное положение.
Благодаря поперечному наклону оси поворота при повороте управляемых колёс кузов автомобиля приподнимается, вследствие чего возникают силы, стремящиеся вернуть колесо в прямолинейное положение.


 Угол бокового увода возникает в том случае, когда на катящийся автомобиль действуют посторонние боковые силы, такие, как сила ветра и центробежная сила. При этом колёса меняют направление своего движения и движутся под определённым углом к прежнему направлению движения.
Угол бокового увода возникает в том случае, когда на катящийся автомобиль действуют посторонние боковые силы, такие, как сила ветра и центробежная сила. При этом колёса меняют направление своего движения и движутся под определённым углом к прежнему направлению движения.

 Смещение оси позволяет сделать вывод о возможных повреждениях кузова.
Смещение оси позволяет сделать вывод о возможных повреждениях кузова.
 9 м
9 м
 5d MT 2003 — 2009
5d MT 2003 — 2009
 Но в середине 90 годов прошлого века в концерне задумались о создании комфортного семейного Volkswagen Multivan на базе классического Фольксваген Транспортер. Название новой марки расшифровывается просто: Multi — легко трансформируемый, van — вместительный. В 2018 году выпускается Мультиван уже шестого поколения. Этот микроавтобус бизнес-класса, рассчитанный на 7 сидячих мест, пользуется спросом в коммерческих структурах и среди больших семей, благодаря комфортному передвижению как по улицам миллионных мегаполисов, так и во время поездок за город или многодневных автомобильных путешествиях.
Но в середине 90 годов прошлого века в концерне задумались о создании комфортного семейного Volkswagen Multivan на базе классического Фольксваген Транспортер. Название новой марки расшифровывается просто: Multi — легко трансформируемый, van — вместительный. В 2018 году выпускается Мультиван уже шестого поколения. Этот микроавтобус бизнес-класса, рассчитанный на 7 сидячих мест, пользуется спросом в коммерческих структурах и среди больших семей, благодаря комфортному передвижению как по улицам миллионных мегаполисов, так и во время поездок за город или многодневных автомобильных путешествиях. Светодиодные фары отличаются оригинальным дизайном со слегка наклонённым стеклом. В них встроены светодиодные ходовые огни. Кузов оснащён хромированным пакетом декоративных деталей (дополнительный хромированный кант на каждой фаре, боковые молдинги с хромированным обрамлением, хромированный кант задней двери, боковая мигалка в шильдике). Средняя часть переднего бампера выполнена в виде дополнительного воздухозаборника, в нижней части расположены противотуманные фары, которые поочерёдно автоматически включаются при прохождении поворотов в условиях недостаточной видимости (при правом повороте включается правая противотуманка, при левом — левая). В целом, внешний вид Multivan смотрится строго, солидно, современно.
Светодиодные фары отличаются оригинальным дизайном со слегка наклонённым стеклом. В них встроены светодиодные ходовые огни. Кузов оснащён хромированным пакетом декоративных деталей (дополнительный хромированный кант на каждой фаре, боковые молдинги с хромированным обрамлением, хромированный кант задней двери, боковая мигалка в шильдике). Средняя часть переднего бампера выполнена в виде дополнительного воздухозаборника, в нижней части расположены противотуманные фары, которые поочерёдно автоматически включаются при прохождении поворотов в условиях недостаточной видимости (при правом повороте включается правая противотуманка, при левом — левая). В целом, внешний вид Multivan смотрится строго, солидно, современно.
 Второй ряд состоит из двух поворотных сидений, которые позволяют пассажирам сидеть по ходу или против хода движения.
Второй ряд состоит из двух поворотных сидений, которые позволяют пассажирам сидеть по ходу или против хода движения.

 Ёмкость бака рассчитывалась на дальний пробег и у всех моделей равняется 80 литрам.
Ёмкость бака рассчитывалась на дальний пробег и у всех моделей равняется 80 литрам. 2/6.9/8.1
2/6.9/8.1 В Европе дизеля и бензиновые версии комплектуются дополнительно с автоматической КПП и вариатором.
В Европе дизеля и бензиновые версии комплектуются дополнительно с автоматической КПП и вариатором. В зависимости от выбранной калибровки изменяется не только демпфирование амортизаторов, но и дорожный просвет. Доступный выбор режимов: Normal, Comfort и Sport. Спортивный вариант — это жёсткие настройки упругих элементов подвески, с понижением клиренса на 40 мм. Большинство водителей выбирает режим Comfort, который рассчитан на мягкую комфортную езду. В шасси Multivan нового поколения применено оригинальное решение борьбы с вибрациями кузова на неровной дороге. Крепление поперечных тяг у независимой передней подвески сделано не к днищу кузова, а к подрамнику. К нему же прикручен и стабилизатор поперечной устойчивости. А подрамник болтами крепится к усиленным местам кузова через сайлентблоки. Колёсная база исполняется в двух вариантах: 3000 и 3400 мм. Задняя подвеска независимого типа, закреплённая на двойных поперечных рычагах.
В зависимости от выбранной калибровки изменяется не только демпфирование амортизаторов, но и дорожный просвет. Доступный выбор режимов: Normal, Comfort и Sport. Спортивный вариант — это жёсткие настройки упругих элементов подвески, с понижением клиренса на 40 мм. Большинство водителей выбирает режим Comfort, который рассчитан на мягкую комфортную езду. В шасси Multivan нового поколения применено оригинальное решение борьбы с вибрациями кузова на неровной дороге. Крепление поперечных тяг у независимой передней подвески сделано не к днищу кузова, а к подрамнику. К нему же прикручен и стабилизатор поперечной устойчивости. А подрамник болтами крепится к усиленным местам кузова через сайлентблоки. Колёсная база исполняется в двух вариантах: 3000 и 3400 мм. Задняя подвеска независимого типа, закреплённая на двойных поперечных рычагах.
 Этим самым тормоза постоянно находятся в рабочем состоянии независимо от погодных условий.
Этим самым тормоза постоянно находятся в рабочем состоянии независимо от погодных условий. Одно — в качестве семейного автомобиля с большим количеством родственников. Второе — как коммерческий автомобиль для корпоративных клиентов. Роднит оба направления переднеприводная платформа для легковых автомобилей и большие возможности переоборудования салона под разные нужды. У всех моделей Multivan T6 посадочные места рассчитаны на 6–8 человек, включая водителя. Это радует, потому что для их управления не надо в водительском удостоверении открывать дополнительную категорию.
Одно — в качестве семейного автомобиля с большим количеством родственников. Второе — как коммерческий автомобиль для корпоративных клиентов. Роднит оба направления переднеприводная платформа для легковых автомобилей и большие возможности переоборудования салона под разные нужды. У всех моделей Multivan T6 посадочные места рассчитаны на 6–8 человек, включая водителя. Это радует, потому что для их управления не надо в водительском удостоверении открывать дополнительную категорию. 1, габариты и ходовые качества
1, габариты и ходовые качества Для прохождения тест-драйва при себе необходимо иметь водительское удостоверение и паспорт.
Для прохождения тест-драйва при себе необходимо иметь водительское удостоверение и паспорт. 0 MT (1992 — 2003):
0 MT (1992 — 2003): 5d AT (1998 — 2003)
5d AT (1998 — 2003) 8 AT (1998 — 2003)
8 AT (1998 — 2003) 0 AT 4WD (2011 — н.в.)
0 AT 4WD (2011 — н.в.) 0 MT (2012 — н.в.)
0 MT (2012 — н.в.)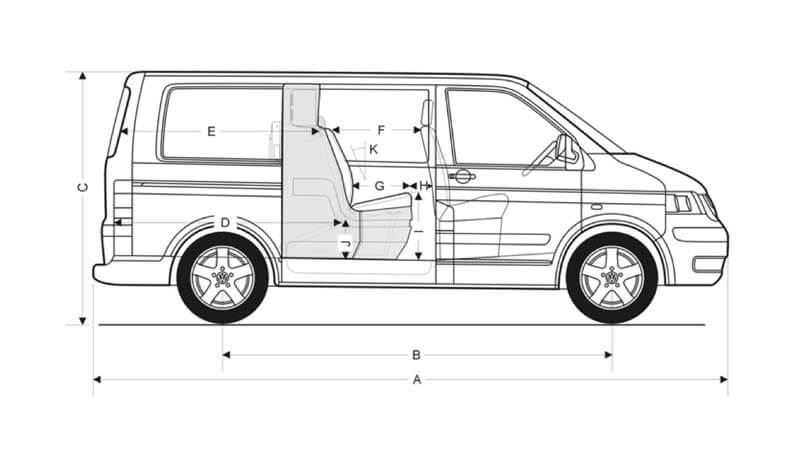 0d AT (2009 — 2010)
0d AT (2009 — 2010) 0d AT 4WD (2009 — н.в.)
0d AT 4WD (2009 — н.в.).jpg) 0d MT (2009 — н.в.)
0d MT (2009 — н.в.) 0d MT 4WD (2010 — н.в.)
0d MT 4WD (2010 — н.в.)

 Один из недостатков – то, что параметры положения колеса вроде развала, схождения и ширины колеи могут меняться при работе подвески.
Один из недостатков – то, что параметры положения колеса вроде развала, схождения и ширины колеи могут меняться при работе подвески. В целом здесь работает простой принцип «чем сложнее, тем дороже».
В целом здесь работает простой принцип «чем сложнее, тем дороже».
 09.2022
09.2022 09.2022
09.2022 ..
.. Нередко перед водителями возникает вполне обоснованный вопрос: зависимая или независимая подвеска – какая лучше. Сегодня мы постараемся на него ответить, но перед этим, мы узнаем конкретно, из чего состоит подвеска, и рассмотрим каждый ее вид по отдельности.
Нередко перед водителями возникает вполне обоснованный вопрос: зависимая или независимая подвеска – какая лучше. Сегодня мы постараемся на него ответить, но перед этим, мы узнаем конкретно, из чего состоит подвеска, и рассмотрим каждый ее вид по отдельности. В СССР в качестве примера можно привести подвеску автомобиля ЗАЗ-965.
В СССР в качестве примера можно привести подвеску автомобиля ЗАЗ-965.

 Также выделяют торсионно-рычажную конструкцию и систему типа De Dion;
Также выделяют торсионно-рычажную конструкцию и систему типа De Dion; Это один из ключевых способов, как отличить конструкции между собой. Просто взгляните, как левое и правое колесо соединяются друг с другом.
Это один из ключевых способов, как отличить конструкции между собой. Просто взгляните, как левое и правое колесо соединяются друг с другом.
 Также это прямо влияет на надежность.
Также это прямо влияет на надежность. Зависимые подвески на такое не способны.
Зависимые подвески на такое не способны. В роли упругих элементов использовались витые пружины, торсионы или пневмобаллоны. Данный вариант независимой подвески чаще применялся для задней оси автомобилей, исключение составлял лишь чешский Trabant, передняя подвеска которого была выполнена по такой схеме.
В роли упругих элементов использовались витые пружины, торсионы или пневмобаллоны. Данный вариант независимой подвески чаще применялся для задней оси автомобилей, исключение составлял лишь чешский Trabant, передняя подвеска которого была выполнена по такой схеме. Такое устройство имела задняя подвеска автомобилей ЗАЗ-968, Ford Sierra, Opel Senator и многих других.
Такое устройство имела задняя подвеска автомобилей ЗАЗ-968, Ford Sierra, Opel Senator и многих других. Задний торец пружины упирается в перегородку между моторным отсеком и салоном. Для того чтобы передать усилие от амортизатора пружине, потребовалось ввести дополнительный рычаг, качающийся в вертикальной продольной плоскости вдоль каждого борта. Один конец рычага шарнирно соединяется с верхом амортизационной стойки, а второй также шарнирно с перегородкой. Посередине рычаг имеет упор для пружины.
Задний торец пружины упирается в перегородку между моторным отсеком и салоном. Для того чтобы передать усилие от амортизатора пружине, потребовалось ввести дополнительный рычаг, качающийся в вертикальной продольной плоскости вдоль каждого борта. Один конец рычага шарнирно соединяется с верхом амортизационной стойки, а второй также шарнирно с перегородкой. Посередине рычаг имеет упор для пружины.
 Из минусов можно отметить изменения колесной базы при наезде на препятствия и изменение развала колес при кренах кузова. Также, вследствие того, что рычаги подвергаются постоянным сильным нагрузкам на изгиб и кручение, приходится усиливать их, увеличивая размер и массу.
Из минусов можно отметить изменения колесной базы при наезде на препятствия и изменение развала колес при кренах кузова. Также, вследствие того, что рычаги подвергаются постоянным сильным нагрузкам на изгиб и кручение, приходится усиливать их, увеличивая размер и массу. Ее плюсы – небольшой вес, если разговор идет о ведомой оси, достаточно высокий центр поперечного крена и самое главное – постоянство развала и колеи. Независимо от крена и раскачки на ровной дороге угол наклона колес к дорожной поверхности не изменяется, это значит, что в любых режимах машина имеет наилучшее сцепление с поверхностью. Хотелось бы сказать, что больше ни одна подвеска не может похвастаться подобными свойствами.
Ее плюсы – небольшой вес, если разговор идет о ведомой оси, достаточно высокий центр поперечного крена и самое главное – постоянство развала и колеи. Независимо от крена и раскачки на ровной дороге угол наклона колес к дорожной поверхности не изменяется, это значит, что в любых режимах машина имеет наилучшее сцепление с поверхностью. Хотелось бы сказать, что больше ни одна подвеска не может похвастаться подобными свойствами. Для того чтобы поперечина перестала разворачиваться, с каждой стороны вместо одного продольного рычага можно использовать два, расположенных по системе механизма Уатта. Устранить проблему осевых смещений поможет монтаж продольного рычага, удерживающего балку по центру вместо тяги Панара. Но на практике становится ясно, что такое изменение бессмысленно – конструкция заметно усложняется и требует больше места в высоту. А ведь главная область применения подвески зависимого типа – бюджетные автомобили.
Для того чтобы поперечина перестала разворачиваться, с каждой стороны вместо одного продольного рычага можно использовать два, расположенных по системе механизма Уатта. Устранить проблему осевых смещений поможет монтаж продольного рычага, удерживающего балку по центру вместо тяги Панара. Но на практике становится ясно, что такое изменение бессмысленно – конструкция заметно усложняется и требует больше места в высоту. А ведь главная область применения подвески зависимого типа – бюджетные автомобили.
 Тем самым обеспечивается хорошая управляемость. По этой причине подвеска на двойных поперечных рычагах применяется в гоночных автомобилях. С точки зрения кинематики эта подвеска не имеет недостатков.
Тем самым обеспечивается хорошая управляемость. По этой причине подвеска на двойных поперечных рычагах применяется в гоночных автомобилях. С точки зрения кинематики эта подвеска не имеет недостатков.
 Но характер автомобилей во многом все равно зависит именно от того, как реализованы те или иные узлы. Сегодня разговор пойдет о сравнении независимой многорычажной и полузависимой подвески, так называемой подвески со скручиваемой балкой, и об области применения различных технических решений.
Но характер автомобилей во многом все равно зависит именно от того, как реализованы те или иные узлы. Сегодня разговор пойдет о сравнении независимой многорычажной и полузависимой подвески, так называемой подвески со скручиваемой балкой, и об области применения различных технических решений. Также при ходе подвески продольные углы установки подвески должны были оставаться неизменными или меняться по заданному конструктором правилу (обычно требовалось отрицательное схождение при любом ходе). И при ходе сжатия развал относительно уровня поверхности должен оставаться неизменным либо меняться в сторону отрицательного.
Также при ходе подвески продольные углы установки подвески должны были оставаться неизменными или меняться по заданному конструктором правилу (обычно требовалось отрицательное схождение при любом ходе). И при ходе сжатия развал относительно уровня поверхности должен оставаться неизменным либо меняться в сторону отрицательного. Такие конструктивно простые варианты, как подвеска на продольных рычагах и подвеска с качающимся рычагом, оказались по эластокинематике даже хуже зависимой подвески. А очень распространенный в передних подвесках макферсон для задней подходит плохо.
Такие конструктивно простые варианты, как подвеска на продольных рычагах и подвеска с качающимся рычагом, оказались по эластокинематике даже хуже зависимой подвески. А очень распространенный в передних подвесках макферсон для задней подходит плохо. Подвеска на диагональных рычагах заметно ей уступала по характеристикам, но зато конструктивно была значительно проще и надежнее.
Подвеска на диагональных рычагах заметно ей уступала по характеристикам, но зато конструктивно была значительно проще и надежнее. Этот тип подвески позволяет задать кинематику движения колеса с большой точностью. Можно «запрограммировать» любое поведение подвески в зависимости от хода сжатия и направления приложения нагрузки за счет эластокинематики упругих элементов и геометрии рычагов.
Этот тип подвески позволяет задать кинематику движения колеса с большой точностью. Можно «запрограммировать» любое поведение подвески в зависимости от хода сжатия и направления приложения нагрузки за счет эластокинематики упругих элементов и геометрии рычагов. Эта конструкция тоже позволяет задать сложную кинематику движения колеса в любых условиях. Оба варианта подвесок обеспечивают отличные возможности по настройке управляемости для машин.
Эта конструкция тоже позволяет задать сложную кинематику движения колеса в любых условиях. Оба варианта подвесок обеспечивают отличные возможности по настройке управляемости для машин. Практически инженерный шедевр.
Практически инженерный шедевр. И кинематика подвески зависит в основном от взаимного расположения элементов. У подвески со скручиваемой балкой конструкция гибкая, что делает возможным задавать кинематику движения колес. Такая конструкция работоспособна в сравнительно небольшом диапазоне изменения нагрузки и перегрузок.
И кинематика подвески зависит в основном от взаимного расположения элементов. У подвески со скручиваемой балкой конструкция гибкая, что делает возможным задавать кинематику движения колес. Такая конструкция работоспособна в сравнительно небольшом диапазоне изменения нагрузки и перегрузок.

 Ее предназначение заключается в создании достаточно упругой связи кузова и колес автомобиля. Такой род подвески отличается повышенной устойчивостью на поворотах и плавным ходом, так как она имеет свойство гасить самую большую часть колебаний, создаваемых в процессе передвижения по неровному дорожному покрытию.
Ее предназначение заключается в создании достаточно упругой связи кузова и колес автомобиля. Такой род подвески отличается повышенной устойчивостью на поворотах и плавным ходом, так как она имеет свойство гасить самую большую часть колебаний, создаваемых в процессе передвижения по неровному дорожному покрытию. Рычаги, в свою очередь, крепятся на подрамнике.
Рычаги, в свою очередь, крепятся на подрамнике. Это связано с использованием алюминия в процессе изготовления.
Это связано с использованием алюминия в процессе изготовления. Обнаруженные, при этом, люфты сайлентблоков должны быть устранены, как можно скорее, так как это очень сильно влияет на угол постановки колес и способствует неравномерному износу резины.
Обнаруженные, при этом, люфты сайлентблоков должны быть устранены, как можно скорее, так как это очень сильно влияет на угол постановки колес и способствует неравномерному износу резины.
 Иными словами, изменится колея, что является крайне нежелательным эффектом с точки зрения управляемости. Как следствие, верхний рычаг обычно в 1,5 – 1,8 раза короче нижнего. Этим удается добиться такого изменения развала колес, чтобы внешнее по отношению к центру поворота колесо (как более нагруженное) всегда оставалось перпендикулярным дорожной поверхности, что в свою очередь означает максимальную способность передачи боковой нагрузки.
Иными словами, изменится колея, что является крайне нежелательным эффектом с точки зрения управляемости. Как следствие, верхний рычаг обычно в 1,5 – 1,8 раза короче нижнего. Этим удается добиться такого изменения развала колес, чтобы внешнее по отношению к центру поворота колесо (как более нагруженное) всегда оставалось перпендикулярным дорожной поверхности, что в свою очередь означает максимальную способность передачи боковой нагрузки. Кроме того, горизонтальная ориентация подвески «съедает» место под капотом, а также в багажном отсеке, если речь о задней подвеске. Как следствие, двухрычажную подвеску сейчас почти нереально встретить на переднеприводных компактах с поперечным расположением мотора. Затрудняет такой тип подвески и проектирование сминаемых при ударе зон кузова.
Кроме того, горизонтальная ориентация подвески «съедает» место под капотом, а также в багажном отсеке, если речь о задней подвеске. Как следствие, двухрычажную подвеску сейчас почти нереально встретить на переднеприводных компактах с поперечным расположением мотора. Затрудняет такой тип подвески и проектирование сминаемых при ударе зон кузова.
 Верхний и нижний рычаги в подвеске сдвоенные (что уже в сумме дает четыре), и в плане они образуют трапеции. Когда на торможении концы рычагов подаются назад, боковые стороны трапеций работают примерно так же, как тяги моста «Вайсзах», придавая колесам обратное движение, и так устраняют неустойчивость. Пятый рычаг ориентирован косо вперед и при боковом крене машины подруливает в пользу легкой недостаточной поворачиваемости независимо от интенсивности торможения.
Верхний и нижний рычаги в подвеске сдвоенные (что уже в сумме дает четыре), и в плане они образуют трапеции. Когда на торможении концы рычагов подаются назад, боковые стороны трапеций работают примерно так же, как тяги моста «Вайсзах», придавая колесам обратное движение, и так устраняют неустойчивость. Пятый рычаг ориентирован косо вперед и при боковом крене машины подруливает в пользу легкой недостаточной поворачиваемости независимо от интенсивности торможения.
 В повороте развал уходит в плюс, колесо как бы подворачивается под машину, в связи чем резко ухудшается способность автомобиля проходить поворот на большой скорости. Это основной минус подвески Макферсон, именно поэтому данный
В повороте развал уходит в плюс, колесо как бы подворачивается под машину, в связи чем резко ухудшается способность автомобиля проходить поворот на большой скорости. Это основной минус подвески Макферсон, именно поэтому данный К амортизаторам через шаровые соединения подходят две тяги от амортизатора поперечнойустойчивости, которые отвечает за поперечную устойчивость. Как видите устройство подвески достаточно простое, чтобы описать его в 3 строчки.
К амортизаторам через шаровые соединения подходят две тяги от амортизатора поперечнойустойчивости, которые отвечает за поперечную устойчивость. Как видите устройство подвески достаточно простое, чтобы описать его в 3 строчки. к. из-за размеров автомобиля не хватало места для размещения такой подвески. С тех прошло много времени и сейчас подвеска на двойных поперечных рычагах считается идеальным видом независимой подвески. Из-за своих конструктивных особенностей она обеспечивает лучший контроль за положением колеса относительно дороги, ведь двойные рычаги всегда держат колесо перпендикулярно дороге, по этой причине управляемость таких автомобилей гораздо лучше.
к. из-за размеров автомобиля не хватало места для размещения такой подвески. С тех прошло много времени и сейчас подвеска на двойных поперечных рычагах считается идеальным видом независимой подвески. Из-за своих конструктивных особенностей она обеспечивает лучший контроль за положением колеса относительно дороги, ведь двойные рычаги всегда держат колесо перпендикулярно дороге, по этой причине управляемость таких автомобилей гораздо лучше. В отличии от Макферсона, тут два рычага, каждый из рычагов крепится к кузову через сайлентблоки и к поворотному кулаку через шаровое соединение.Верхний рычаг, как правило, имеет меньшую длину, что дает отрицательный угол развала колеса при сжатии и положительный – при растяжении (отбое). Данное свойство придает дополнительную устойчивость автомобилю при прохождении поворотов, оставляя колесо перпендикулярным дороге независимо от положения кузова.
В отличии от Макферсона, тут два рычага, каждый из рычагов крепится к кузову через сайлентблоки и к поворотному кулаку через шаровое соединение.Верхний рычаг, как правило, имеет меньшую длину, что дает отрицательный угол развала колеса при сжатии и положительный – при растяжении (отбое). Данное свойство придает дополнительную устойчивость автомобилю при прохождении поворотов, оставляя колесо перпендикулярным дороге независимо от положения кузова. Т.к. подвеска крепится к подрамнику через сайлент блоки, которые при торможении деформируются и задние колеса начинают смотреть наружу. В этом явлении казалось бы ничего страшного, но представьте что вы перебрали со скоростью в повороте и решили прибегнуть к торможению, тормозить в поворте сама по себе уже не очень хорошая идея. А тут еще и внешнее нагруженное колесо начинает смотреть наружу поворота, автомобиль очень быстро приобретает избыточную поворачиваемость и последствия могут быть самыми печальными. Можно предотвратить данное явление заменив сайлент блоки на шарнирные соединения, но тогда очень сильно пострадает комфорт, ведь никому не хочется стучать зубами на кочках. Поэтому инженеры пошли другим путем.
Т.к. подвеска крепится к подрамнику через сайлент блоки, которые при торможении деформируются и задние колеса начинают смотреть наружу. В этом явлении казалось бы ничего страшного, но представьте что вы перебрали со скоростью в повороте и решили прибегнуть к торможению, тормозить в поворте сама по себе уже не очень хорошая идея. А тут еще и внешнее нагруженное колесо начинает смотреть наружу поворота, автомобиль очень быстро приобретает избыточную поворачиваемость и последствия могут быть самыми печальными. Можно предотвратить данное явление заменив сайлент блоки на шарнирные соединения, но тогда очень сильно пострадает комфорт, ведь никому не хочется стучать зубами на кочках. Поэтому инженеры пошли другим путем. Их количество обычно варьируется от трех до пяти элементов. При изготовлении учитываются особенности конструкции остальных элементов подвески и их взаимодействие. Благодаря схеме Multilink ступичный узел получает дополнительные точки крепления и повышенную подвижность, что значительно улучшает ходовые качества и общую управляемость автомобиля.
Их количество обычно варьируется от трех до пяти элементов. При изготовлении учитываются особенности конструкции остальных элементов подвески и их взаимодействие. Благодаря схеме Multilink ступичный узел получает дополнительные точки крепления и повышенную подвижность, что значительно улучшает ходовые качества и общую управляемость автомобиля. В зависимости от схемы расположения, поперечные рычаги могут также ограничивать и продольные перемещения.
В зависимости от схемы расположения, поперечные рычаги могут также ограничивать и продольные перемещения. Самая простая схема включает в себя два поперечных и один продольный нижний рычаг. Роль верхней опоры выполняет амортизационная стойка, соединенная со ступицей колеса. Данная конструкция подвески Multilink отличается относительной простотой и доступностью производства.
Самая простая схема включает в себя два поперечных и один продольный нижний рычаг. Роль верхней опоры выполняет амортизационная стойка, соединенная со ступицей колеса. Данная конструкция подвески Multilink отличается относительной простотой и доступностью производства.
 Также необходимо предусмотреть сложную структуру взаимодействия элементов, обладающих большей подвижностью, особенно при повороте колеса. В связи с этим передняя подвеска типа Multilink не применяется в основной массе легковых автомобилей, в производстве которых основными критериями остаются невысокая цена, надежность и ремонтопригодность.
Также необходимо предусмотреть сложную структуру взаимодействия элементов, обладающих большей подвижностью, особенно при повороте колеса. В связи с этим передняя подвеска типа Multilink не применяется в основной массе легковых автомобилей, в производстве которых основными критериями остаются невысокая цена, надежность и ремонтопригодность. В настоящее время она широко используется в производстве как легковых автомобилей, так и кроссоверов. Прогрессивная конструкция объединяет достоинства двухрычажной схемы – устойчивость и плавность хода, улучшая их благодаря раздельному расположению направляющих элементов. Подвеска Multilink позволяет повысить управляемость автомобиля, а также реализовать его наилучшее сцепление с дорожным покрытием.
В настоящее время она широко используется в производстве как легковых автомобилей, так и кроссоверов. Прогрессивная конструкция объединяет достоинства двухрычажной схемы – устойчивость и плавность хода, улучшая их благодаря раздельному расположению направляющих элементов. Подвеска Multilink позволяет повысить управляемость автомобиля, а также реализовать его наилучшее сцепление с дорожным покрытием.

 В любом случае должна срочно ремонтироваться независимая подвеска, своими руками сделать это можно, если починка заключается в замене деталей или подтяжке резьбовых соединений, в иных случаях не обойтись без посещения СТО.
В любом случае должна срочно ремонтироваться независимая подвеска, своими руками сделать это можно, если починка заключается в замене деталей или подтяжке резьбовых соединений, в иных случаях не обойтись без посещения СТО. Проверьте следом на целостность шаровые опоры, рычаг, штангу, сайлентблоки. Обратите внимание на все крепежные болты и резиновые уплотнители. Нигде не должно быть трещин, разрывов, разрезов и прочих повреждений. Внимательно пройдитесь взглядом по периметру кузова: там, где детали касаются кузова, должна быть целая и невредимая резиновая прокладка.
Проверьте следом на целостность шаровые опоры, рычаг, штангу, сайлентблоки. Обратите внимание на все крепежные болты и резиновые уплотнители. Нигде не должно быть трещин, разрывов, разрезов и прочих повреждений. Внимательно пройдитесь взглядом по периметру кузова: там, где детали касаются кузова, должна быть целая и невредимая резиновая прокладка. Глушитель внимательно обследуют, можно покачать его в разные стороны, вероятно, это уберет странный стук, также осмотрите крепление.
Глушитель внимательно обследуют, можно покачать его в разные стороны, вероятно, это уберет странный стук, также осмотрите крепление. Устанавливали его исключительно на гоночные автомобили.
Устанавливали его исключительно на гоночные автомобили.



 Поэтому вот несколько советов, которые помогут вам как можно дольше обходиться без ремонта подвески:
Поэтому вот несколько советов, которые помогут вам как можно дольше обходиться без ремонта подвески: 1 Подвеска с качающимися полуосями
1 Подвеска с качающимися полуосями Чаще всего этот вид подвески используется для грузовых машин.
Чаще всего этот вид подвески используется для грузовых машин. На каждом борте автомобиля был рычаг с реактивной тягой. Рычаг оказывал действие на пружину, а реактивная тяга соединялась с кожухом, в котором находилась пружина и передавала усилия при торможении. Этот тип подвески не прижился, потому как из кожуха постоянно вытекала жидкость.
На каждом борте автомобиля был рычаг с реактивной тягой. Рычаг оказывал действие на пружину, а реактивная тяга соединялась с кожухом, в котором находилась пружина и передавала усилия при торможении. Этот тип подвески не прижился, потому как из кожуха постоянно вытекала жидкость. Преимущество данного типа подвески в том, что у Вас есть возможность отрегулировать все необходимые параметры и ее характер во время работы. Эта подвеска очень популярна на спорткарах, потому как на ней можно отрегулировать:
Преимущество данного типа подвески в том, что у Вас есть возможность отрегулировать все необходимые параметры и ее характер во время работы. Эта подвеска очень популярна на спорткарах, потому как на ней можно отрегулировать: В новой подвеске уже не было ввинчивания.
В новой подвеске уже не было ввинчивания.
 Основным ее элементом являются полуоси, имеющие шарниры на внутренних концах, посредством которых они соединяются с дифференциалом. Внешние концы жестко соединяются со ступицей. В роли упругих элементов выступают пружины или листовые рессоры. Особенность конструкции заключается в том, что при наезде на какое-либо препятствие положение колеса относительно полуоси остается неизменно перпендикулярным.
Основным ее элементом являются полуоси, имеющие шарниры на внутренних концах, посредством которых они соединяются с дифференциалом. Внешние концы жестко соединяются со ступицей. В роли упругих элементов выступают пружины или листовые рессоры. Особенность конструкции заключается в том, что при наезде на какое-либо препятствие положение колеса относительно полуоси остается неизменно перпендикулярным. Среди достоинств можно назвать простое устройство, дешевое обслуживание и ремонт.
Среди достоинств можно назвать простое устройство, дешевое обслуживание и ремонт. Благодаря этому сводится к минимуму изменение колесной базы машины, а крены кузова почти не влияют на угол наклона колес автомобиля, однако на неровностях, изменяется ширина колеи, и меняются углы схождения и развала, а значит, ухудшается управляемость. В роли упругих элементов использовались витые пружины, торсионы или пневмобаллоны. Данный вариант независимой подвески чаще применялся для задней оси автомобилей, исключение составлял лишь чешский Trabant, передняя подвеска которого была выполнена по такой схеме.
Благодаря этому сводится к минимуму изменение колесной базы машины, а крены кузова почти не влияют на угол наклона колес автомобиля, однако на неровностях, изменяется ширина колеи, и меняются углы схождения и развала, а значит, ухудшается управляемость. В роли упругих элементов использовались витые пружины, торсионы или пневмобаллоны. Данный вариант независимой подвески чаще применялся для задней оси автомобилей, исключение составлял лишь чешский Trabant, передняя подвеска которого была выполнена по такой схеме. К продольной оси авто она располагается под углом 10-25 градусов, это предпочтительнее для кинематики подвески поскольку отклонения величин колеи, колесной базы и развала остаются в пределах нормы. Такое устройство имела задняя подвеска автомобилей ЗАЗ-968, Ford Sierra, Opel Senator и многих других.
К продольной оси авто она располагается под углом 10-25 градусов, это предпочтительнее для кинематики подвески поскольку отклонения величин колеи, колесной базы и развала остаются в пределах нормы. Такое устройство имела задняя подвеска автомобилей ЗАЗ-968, Ford Sierra, Opel Senator и многих других. Особых преимуществ перед «МакФерсоном» она не имеет, и сохранила все кинематические недостатки, зато утратила главные достоинства, такие как компактность, технологическая простота, малое количество шарнирных соединений.
Особых преимуществ перед «МакФерсоном» она не имеет, и сохранила все кинематические недостатки, зато утратила главные достоинства, такие как компактность, технологическая простота, малое количество шарнирных соединений. Также, вследствие того, что рычаги подвергаются постоянным сильным нагрузкам на изгиб и кручение, приходится усиливать их, увеличивая размер и массу.
Также, вследствие того, что рычаги подвергаются постоянным сильным нагрузкам на изгиб и кручение, приходится усиливать их, увеличивая размер и массу. Кроме того, у производителя есть возможность выбрать наиболее оптимальный способ размещения рычагов, жестко задав тем самым требуемые параметры. Тем самым обеспечивается хорошая управляемость. По этой причине подвеска на двойных поперечных рычагах применяется в гоночных автомобилях. С точки зрения кинематики эта подвеска не имеет недостатков.
Кроме того, у производителя есть возможность выбрать наиболее оптимальный способ размещения рычагов, жестко задав тем самым требуемые параметры. Тем самым обеспечивается хорошая управляемость. По этой причине подвеска на двойных поперечных рычагах применяется в гоночных автомобилях. С точки зрения кинематики эта подвеска не имеет недостатков.
 (бензин/дизель)
(бензин/дизель) Рулевой привод с ГУР интегрального типа. Рулевая колонка, регулируемая по высоте и углу наклона.
Рулевой привод с ГУР интегрального типа. Рулевая колонка, регулируемая по высоте и углу наклона. ГУР, КПП 5-ступенчатая. Панель приборов «Оптима».
ГУР, КПП 5-ступенчатая. Панель приборов «Оптима».

 с.)
с.)


 с.)
с.)

 с.)
с.)


 При общей диагностике определяют техническое состояние агрегатов и узлов автомобиля, обеспечивающих безопасность движения. Поэлементная диагностика позволяет определить техническое состояние агрегатов и узлов автомобиля, выявить причины возникновения тех или иных неисправностей и уточнить объем необходимых работ по техническому обслуживанию и ремонту автомобиля.
При общей диагностике определяют техническое состояние агрегатов и узлов автомобиля, обеспечивающих безопасность движения. Поэлементная диагностика позволяет определить техническое состояние агрегатов и узлов автомобиля, выявить причины возникновения тех или иных неисправностей и уточнить объем необходимых работ по техническому обслуживанию и ремонту автомобиля. Все работы по диагностированию и основным регулировкам выполняются до поступления автомобиля на линию ТО-1. После диагностирования у автомобиля, поступившего на посты линии ТО-1, выполняют главным образом крепежные и смазочные работы. Такая схема требует большей площади для всей зоны технического обслуживания.
Все работы по диагностированию и основным регулировкам выполняются до поступления автомобиля на линию ТО-1. После диагностирования у автомобиля, поступившего на посты линии ТО-1, выполняют главным образом крепежные и смазочные работы. Такая схема требует большей площади для всей зоны технического обслуживания.

 Соединяющая их траншея делается более широкой (до 2 м) и в ней располагаются верстаки и оборудование, необходимое для обслуживания автомобиля снизу. Все канавы обрамляются ребордами для направления колес автомобиля.
Соединяющая их траншея делается более широкой (до 2 м) и в ней располагаются верстаки и оборудование, необходимое для обслуживания автомобиля снизу. Все канавы обрамляются ребордами для направления колес автомобиля. При обслуживании автомобилей с малым дорожным просветом глубина канавы может быть увеличена.
При обслуживании автомобилей с малым дорожным просветом глубина канавы может быть увеличена. В качестве материала для строительства эстакад используют дерево, железобетон или стальной прокат.
В качестве материала для строительства эстакад используют дерево, железобетон или стальной прокат. На каждый винт надета грузо- несущая гайка, закрепленная в зубчатой муфте, установленной в шестерне конического редуктора.
На каждый винт надета грузо- несущая гайка, закрепленная в зубчатой муфте, установленной в шестерне конического редуктора. Опасность самопроизвольного опускания подъемника устраняется применением откидывающихся стоек, которые крепятся к раме.
Опасность самопроизвольного опускания подъемника устраняется применением откидывающихся стоек, которые крепятся к раме. Опорная чашка дополнительно соединяется с рамой двумя тягами, которые позволяют поддерживать опорную чашку в горизонтальном положении независимо от угла наклона стрелы. Масляный насос приводится в действие качательными движениями рычага, используемого также для передвижения тележки. Передвижной домкрат рассчитан на нагрузку до 6 тс и высоту подъема до 600 мм.
Опорная чашка дополнительно соединяется с рамой двумя тягами, которые позволяют поддерживать опорную чашку в горизонтальном положении независимо от угла наклона стрелы. Масляный насос приводится в действие качательными движениями рычага, используемого также для передвижения тележки. Передвижной домкрат рассчитан на нагрузку до 6 тс и высоту подъема до 600 мм. Для смазки механизмов и узлов автомобиля консистентными маслами используют ручное и механизированное оборудование. К простейшему оборудованию относятся нагнетатели с ручным приводом, входящие в комплект инструмента.
Для смазки механизмов и узлов автомобиля консистентными маслами используют ручное и механизированное оборудование. К простейшему оборудованию относятся нагнетатели с ручным приводом, входящие в комплект инструмента. Для отсчета количества выданного моторного масла имеется счетчик. Все шланги, самонаматывающиися на барабаны, выполнены в виде катушек пустотелой осью. Спиральная пружина, закрепленная одним концом на крестовине оси, а другим концом — в корпусе катушки, обеспечивает самонаматыватель шланга. Стопорное устройство позволяет зафиксировать длину шланга, необходимую для выполнения смазочных работ.
Для отсчета количества выданного моторного масла имеется счетчик. Все шланги, самонаматывающиися на барабаны, выполнены в виде катушек пустотелой осью. Спиральная пружина, закрепленная одним концом на крестовине оси, а другим концом — в корпусе катушки, обеспечивает самонаматыватель шланга. Стопорное устройство позволяет зафиксировать длину шланга, необходимую для выполнения смазочных работ. 0 из
0 из


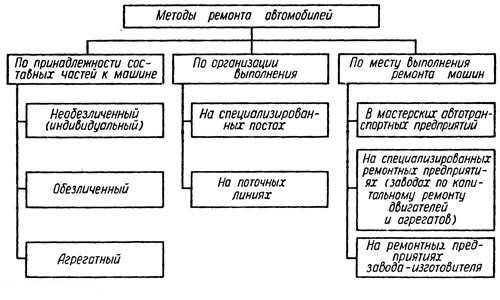 Относительно небольшое количество оборудования, которое при этом лучше используется, обеспечивает более полную механизацию работ. В результате специализации работ, выполняемых на каждом посту рабочими более узкой квалификации, повышается производительность труда на 20%. Техническая диагностика автомобилей (ТД) в значительной степени способствует внедрению поточного метода, так как на обслуживание поступают автомобили с более стабильной трудоемкостью.
Относительно небольшое количество оборудования, которое при этом лучше используется, обеспечивает более полную механизацию работ. В результате специализации работ, выполняемых на каждом посту рабочими более узкой квалификации, повышается производительность труда на 20%. Техническая диагностика автомобилей (ТД) в значительной степени способствует внедрению поточного метода, так как на обслуживание поступают автомобили с более стабильной трудоемкостью.
 Высокий уровень организации технического обслуживания позволяет не только повысить качество технического обслуживания, но и снизить его стоимость, более эффективно использовать материальную базу, кадры и другие резервы предприятия.
Высокий уровень организации технического обслуживания позволяет не только повысить качество технического обслуживания, но и снизить его стоимость, более эффективно использовать материальную базу, кадры и другие резервы предприятия. Машины, отличающиеся малой мобильностью, остаются на месте выполнения строительных работ, и их техническое обслуживание выполняется с широким использованием агрегатов технического обслуживания и передвижных мастерских.
Машины, отличающиеся малой мобильностью, остаются на месте выполнения строительных работ, и их техническое обслуживание выполняется с широким использованием агрегатов технического обслуживания и передвижных мастерских.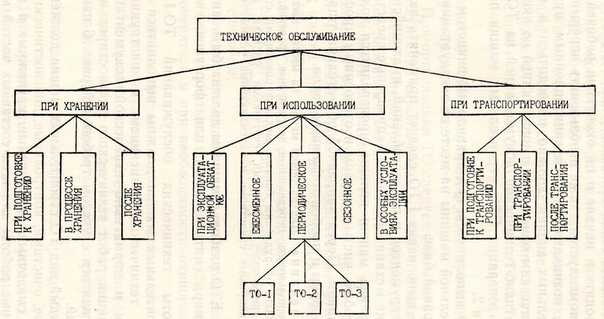 Централизованная форма технического обслуживания характеризуется тем, что все рабочие операции выполняются бригадами рабочих высокой квалификации под руководством инженерно-технического персонала. Таким образом, при этой форме обслуживания машинист машины полностью освобождается от участия в работах. Эта форма технического обслуживания наиболее прогрессивна, так как она прежде всего направлена на выполнение всех элементов системы планово-предупредительного технического обслуживания и ремонта в соответствии с техническими условиями и при наименьших затратах средств.
Централизованная форма технического обслуживания характеризуется тем, что все рабочие операции выполняются бригадами рабочих высокой квалификации под руководством инженерно-технического персонала. Таким образом, при этой форме обслуживания машинист машины полностью освобождается от участия в работах. Эта форма технического обслуживания наиболее прогрессивна, так как она прежде всего направлена на выполнение всех элементов системы планово-предупредительного технического обслуживания и ремонта в соответствии с техническими условиями и при наименьших затратах средств.

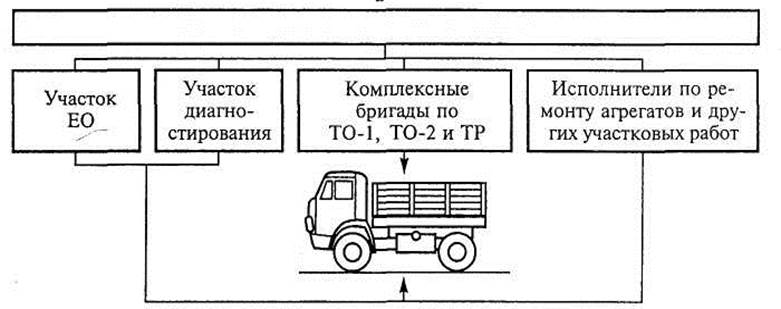

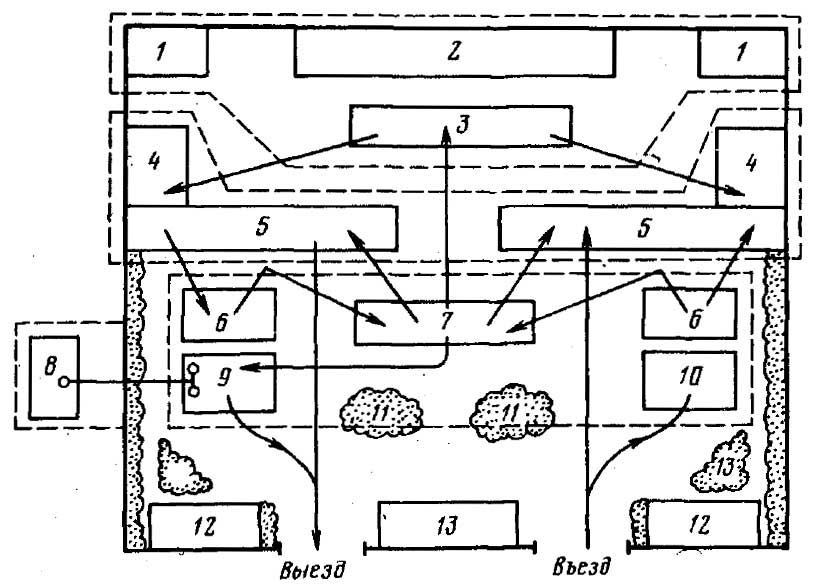 д.
д.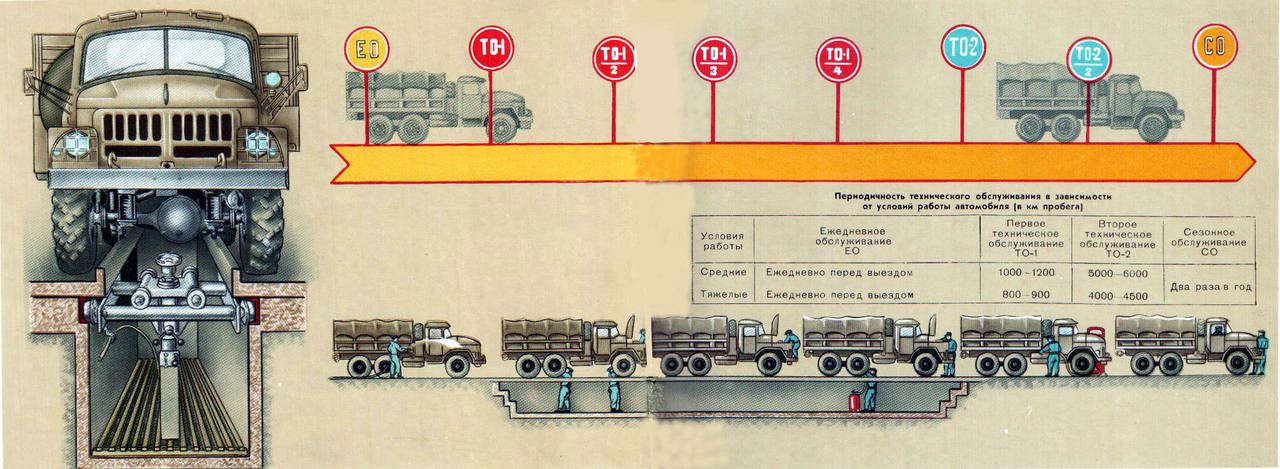

 Типовой перечень основной документации приведен в Приложении 5.
Типовой перечень основной документации приведен в Приложении 5. 2.2.03-87 и ГОСТ 25478-91. На предприятиях автотехобслуживания осуществляется проверка всех автомобилей, прошедших ТО и ремонт.
2.2.03-87 и ГОСТ 25478-91. На предприятиях автотехобслуживания осуществляется проверка всех автомобилей, прошедших ТО и ремонт.
 ru
ru Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 16 февраля 2018; проверки требуют 22 правки. Ремонт уличной лампы с платформы в Днипро
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 16 февраля 2018; проверки требуют 22 правки. Ремонт уличной лампы с платформы в Днипро

 Устраняются выявленные замечания во время технологических перерывов, переходов и обычно без остановки технологического процесса, или с кратковременной остановкой.
Устраняются выявленные замечания во время технологических перерывов, переходов и обычно без остановки технологического процесса, или с кратковременной остановкой.
 При этом трудоемкость должна соответствовать фактическому объему выполненных работ)
При этом трудоемкость должна соответствовать фактическому объему выполненных работ) Для расчета его трудоемкости допускается использовать не более 20 % от скорректированной трудоемкости соответствующего ТО
Для расчета его трудоемкости допускается использовать не более 20 % от скорректированной трудоемкости соответствующего ТО
 Длительное сохранение оборудованием работоспособности и уменьшение суммы затрат на ее поддержание и потерь основного производства, связанных с простоями оборудования из-за неисправности, требуют рациональной организации эксплуатации и обязательного выполнения комплекса работ по его техническому обслуживанию.
Длительное сохранение оборудованием работоспособности и уменьшение суммы затрат на ее поддержание и потерь основного производства, связанных с простоями оборудования из-за неисправности, требуют рациональной организации эксплуатации и обязательного выполнения комплекса работ по его техническому обслуживанию. 







 Сокращение времени простоя оборудования в ремонте и снижение трудозатрат на ремонт.
Сокращение времени простоя оборудования в ремонте и снижение трудозатрат на ремонт. Техническое обслуживание оборудования осуществляют в период между ремонтами через интервал времени, установленный нормативно-технической документацией. При этом вводят понятие цикла технического обслуживания, как наименьшего повторяющегося интервала времени (или наработки изделия), в течение которого в определенной последовательности выполняют все необходимые виды операций. При техническом обслуживании оборудование не подвергают разборке.
Техническое обслуживание оборудования осуществляют в период между ремонтами через интервал времени, установленный нормативно-технической документацией. При этом вводят понятие цикла технического обслуживания, как наименьшего повторяющегося интервала времени (или наработки изделия), в течение которого в определенной последовательности выполняют все необходимые виды операций. При техническом обслуживании оборудование не подвергают разборке. Перед пуском в работу всю сварочную установку, пульт, шкаф управления и источник питания протирают чистой ветошью.
Перед пуском в работу всю сварочную установку, пульт, шкаф управления и источник питания протирают чистой ветошью. Подтягивают болтовые соединения.
Подтягивают болтовые соединения. Если технологическое обслуживание выполняется персоналом и средствами одного подразделения организации или предприятия, то его называют централизованным методом технического обслуживания. Метод технического обслуживания, выполняемый эксплуатационным персоналом, работающим на данном оборудовании, при использовании его по назначению, называют методом технического обслуживания эксплуатационным персоналом. Техническое обслуживание персоналом, специализированным на выполнении этой операции, называют методом технического обслуживания специализированным персоналом. Методом технического обслуживания специализированной организацией называют метод при выполнении его такой организацией.
Если технологическое обслуживание выполняется персоналом и средствами одного подразделения организации или предприятия, то его называют централизованным методом технического обслуживания. Метод технического обслуживания, выполняемый эксплуатационным персоналом, работающим на данном оборудовании, при использовании его по назначению, называют методом технического обслуживания эксплуатационным персоналом. Техническое обслуживание персоналом, специализированным на выполнении этой операции, называют методом технического обслуживания специализированным персоналом. Методом технического обслуживания специализированной организацией называют метод при выполнении его такой организацией.


 При обезличенном методе ремонта не сохраняют принадлежность воcстановленных составных частей к определенному экземпляру изделия. При необезличенном — сохраняют. Агрегатный метод ремонта — это обезличенный метод, при котором неисправные агрегаты заменяют новыми или заранее отремонтированными. Его считают наиболее прогрессивным из-за значительного сокращения сроков ремонта.
При обезличенном методе ремонта не сохраняют принадлежность воcстановленных составных частей к определенному экземпляру изделия. При необезличенном — сохраняют. Агрегатный метод ремонта — это обезличенный метод, при котором неисправные агрегаты заменяют новыми или заранее отремонтированными. Его считают наиболее прогрессивным из-за значительного сокращения сроков ремонта.
 Техническая служба автотранспортного предприятия может корректировать план-график в зависимости от фактического пробега того или иного автомобиля, перенося отдельные виды обслуживания на более близкие или далекие сроки.
Техническая служба автотранспортного предприятия может корректировать план-график в зависимости от фактического пробега того или иного автомобиля, перенося отдельные виды обслуживания на более близкие или далекие сроки.

 В техническом отделе автотранспортного предприятия на основе записей в этих листах контролируется выполнение плана- графика работ по техническому обслуживанию.
В техническом отделе автотранспортного предприятия на основе записей в этих листах контролируется выполнение плана- графика работ по техническому обслуживанию.
 При этом применяется одна из двух схем организации технологического процесса диагностирования.
При этом применяется одна из двух схем организации технологического процесса диагностирования.

 Т.е. если фондоотдача равна 2-м, то на 1 рубль вложений в основные фонды приходится 2 рубля дохода.
Т.е. если фондоотдача равна 2-м, то на 1 рубль вложений в основные фонды приходится 2 рубля дохода. Данный коэффициент показывает эффективность использования оборудования по времени. Если по норме он должен работать 8 часов в смену, а отработал 6 часов, то коэффициент равен 0,75, что меньше 1. Оборудование используется не эффективно.
Данный коэффициент показывает эффективность использования оборудования по времени. Если по норме он должен работать 8 часов в смену, а отработал 6 часов, то коэффициент равен 0,75, что меньше 1. Оборудование используется не эффективно.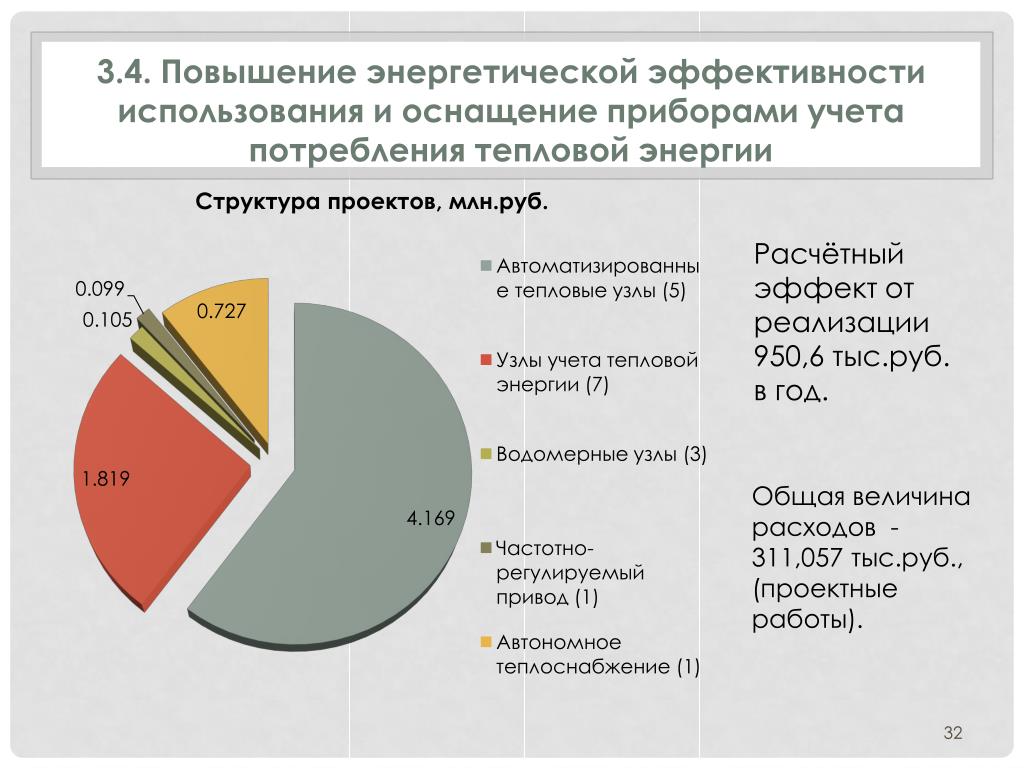 е. если станок по норме должен произвести 5 деталей за смену, а произвел 6, то коэффициент равен 1,2, что больше 1-цы, и это говорит, что оборудование используется эффективно.
е. если станок по норме должен произвести 5 деталей за смену, а произвел 6, то коэффициент равен 1,2, что больше 1-цы, и это говорит, что оборудование используется эффективно. д.
д.


 Мы кардинально изменили свой подход к техническому обслуживанию и ремонту, снизив долю ремонтов «по событию», когда ремонт оборудования производится только в случае отказа или повреждения составных частей оборудования, и увеличив долю ремонтов «по состоянию», когда контроль технического состояния выполняется с периодичностью и в объеме, установленном в нормативно-технической документации, а момент начала ремонта и объем восстановления определяется техническим состоянием составных частей оборудования:
Мы кардинально изменили свой подход к техническому обслуживанию и ремонту, снизив долю ремонтов «по событию», когда ремонт оборудования производится только в случае отказа или повреждения составных частей оборудования, и увеличив долю ремонтов «по состоянию», когда контроль технического состояния выполняется с периодичностью и в объеме, установленном в нормативно-технической документации, а момент начала ремонта и объем восстановления определяется техническим состоянием составных частей оборудования:
 В большинстве случаев целесообразно регистрировать три параметра работы оборудования: готовность (процент времени, в течение которого оборудование в порядке и может начать работу в любой момент), производительность (скорость работы) и качество выхода.
В большинстве случаев целесообразно регистрировать три параметра работы оборудования: готовность (процент времени, в течение которого оборудование в порядке и может начать работу в любой момент), производительность (скорость работы) и качество выхода.

 Бизнес-логика системы нацелена на предотвращение возникновения поломок путем автоматичного формирования заказ-нарядов на профилактическое обслуживание по расписанию или по отклонениям от нормативных показателей по результатам диагностики оборудования. Очень важным моментом в работе информационной системы является также то, что без анализа и указания коренной причины отказа невозможно закрыть заказ-наряд или забыть о нем.
Бизнес-логика системы нацелена на предотвращение возникновения поломок путем автоматичного формирования заказ-нарядов на профилактическое обслуживание по расписанию или по отклонениям от нормативных показателей по результатам диагностики оборудования. Очень важным моментом в работе информационной системы является также то, что без анализа и указания коренной причины отказа невозможно закрыть заказ-наряд или забыть о нем.

 Вот такое идеальное представление. Возможно, вы дополните его своими характеристиками и качествами. Тем не менее, перечисленного выше уже будет достаточно, чтобы получить представление об эффективно работающем оборудовании.
Вот такое идеальное представление. Возможно, вы дополните его своими характеристиками и качествами. Тем не менее, перечисленного выше уже будет достаточно, чтобы получить представление об эффективно работающем оборудовании. На нём слева направо в виде столбцов отображено время использования или время эффективной и неэффективной работы оборудования.
На нём слева направо в виде столбцов отображено время использования или время эффективной и неэффективной работы оборудования. Таким образом из 24 часов общего времени может остаться до 5-6 часов доступного времени, т.е. того времени, которое мы выделили (запланировали) на работу. Мы предполагаем, что в течение доступного времени оборудование будет жужжать, пыхтеть и работать, производя продукт.
Таким образом из 24 часов общего времени может остаться до 5-6 часов доступного времени, т.е. того времени, которое мы выделили (запланировали) на работу. Мы предполагаем, что в течение доступного времени оборудование будет жужжать, пыхтеть и работать, производя продукт. На протяжении всего фактического времени работы оборудование по факту жужжало, пыхтело и производило продукт.
На протяжении всего фактического времени работы оборудование по факту жужжало, пыхтело и производило продукт. Чистое время представляет собой разницу фактического времени работы и потерь скорости и производительности, выраженной во времени. Таким образом, на производство продукта мы имеем ещё меньше времени.
Чистое время представляет собой разницу фактического времени работы и потерь скорости и производительности, выраженной во времени. Таким образом, на производство продукта мы имеем ещё меньше времени.  Эффективность работы оборудования в классическом TPM, принято измерять коэффициентом OEE, который мы рассматриваем в следующем разделе.
Эффективность работы оборудования в классическом TPM, принято измерять коэффициентом OEE, который мы рассматриваем в следующем разделе. Измерение эффективности поможет оценить результаты ваших работ, а также подобрать более действенные и результативные мероприятия.
Измерение эффективности поможет оценить результаты ваших работ, а также подобрать более действенные и результативные мероприятия.
 Они могут быть двух типов: плановые и внеплановые.
Они могут быть двух типов: плановые и внеплановые.


 У вас появятся данные о простое оборудования, о потреблении конкретным станком электроэнергии.
У вас появятся данные о простое оборудования, о потреблении конкретным станком электроэнергии.


 Ввиду разнообразия типоразмеров одноименных машин нормы даны на условный измеритель: для экскаваторов — на 1 м3 емкости ковша, для бетономешалок — на 1 м3 номинальной емкости смесительного барабана, для кранов — на 1 т грузоподъемности и т. д.
Ввиду разнообразия типоразмеров одноименных машин нормы даны на условный измеритель: для экскаваторов — на 1 м3 емкости ковша, для бетономешалок — на 1 м3 номинальной емкости смесительного барабана, для кранов — на 1 т грузоподъемности и т. д.

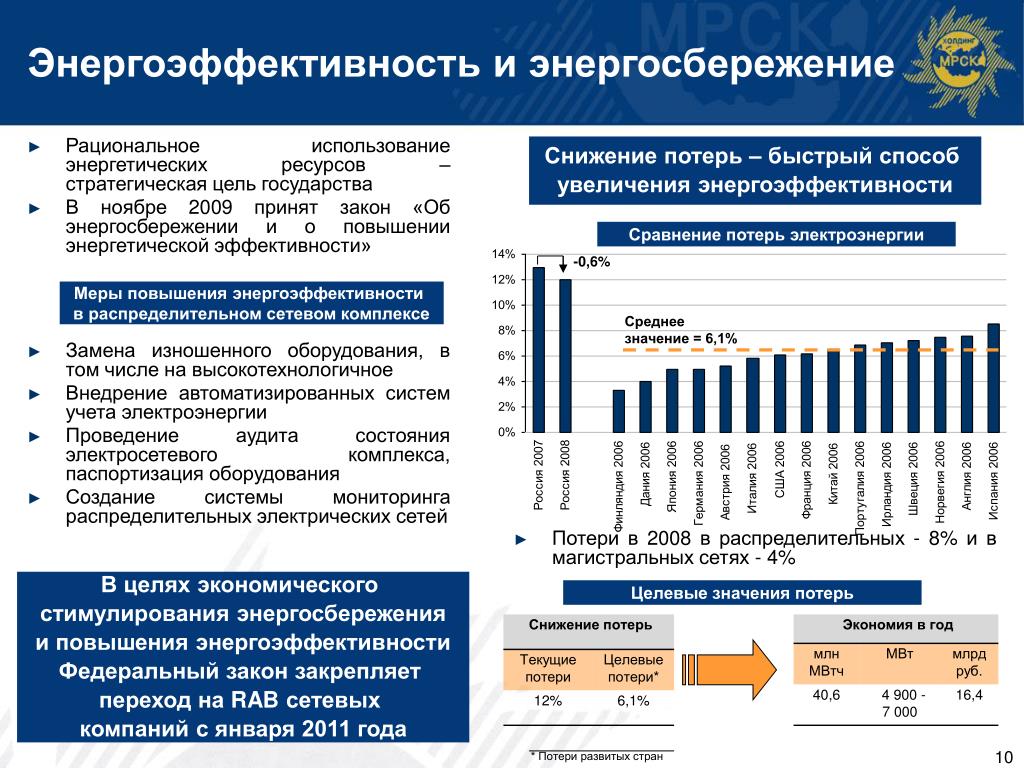
 Поэтому они резко повышают себестоимость при низкой выработке и неполном использовании машин. Текущие эксплуатационные расходы составляют около 50% всех затрат ма-шино-смены и несколько увеличиваются при интенсивной работе машин. Однако при хорошей организации обслуживания машин может быть достигнуто снижение расходов по этой статье на экономии топлива, смазочных материалов, а также на текущих ремонтах.
Поэтому они резко повышают себестоимость при низкой выработке и неполном использовании машин. Текущие эксплуатационные расходы составляют около 50% всех затрат ма-шино-смены и несколько увеличиваются при интенсивной работе машин. Однако при хорошей организации обслуживания машин может быть достигнуто снижение расходов по этой статье на экономии топлива, смазочных материалов, а также на текущих ремонтах. ua
ua Но как правильно произвести расчет? И существует ли идеальный показатель ОEЕ?
Но как правильно произвести расчет? И существует ли идеальный показатель ОEЕ?
 Здесь существенную роль играют 3 и 4 причины: небольшие простои и снижение производительности.
Здесь существенную роль играют 3 и 4 причины: небольшие простои и снижение производительности.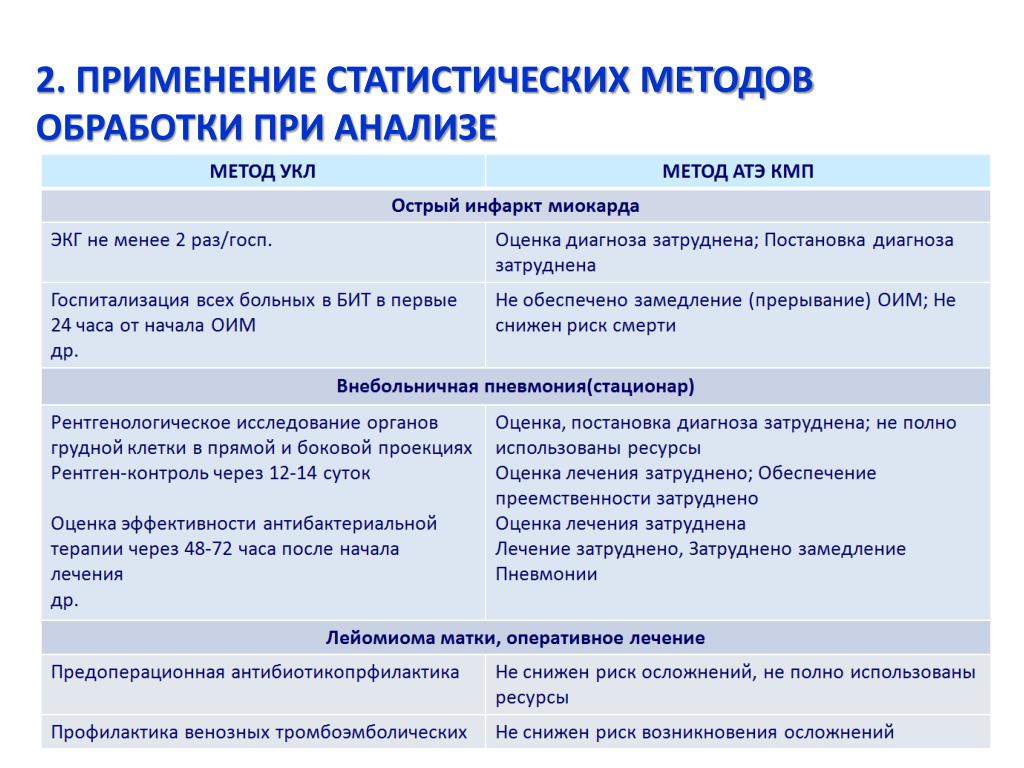 Не стоит занижать планку, используя среднюю скорость работы оборудования. Вы рискуете не увидеть влияние шести основных причин потери эффективности на вашем производстве.
Не стоит занижать планку, используя среднюю скорость работы оборудования. Вы рискуете не увидеть влияние шести основных причин потери эффективности на вашем производстве.
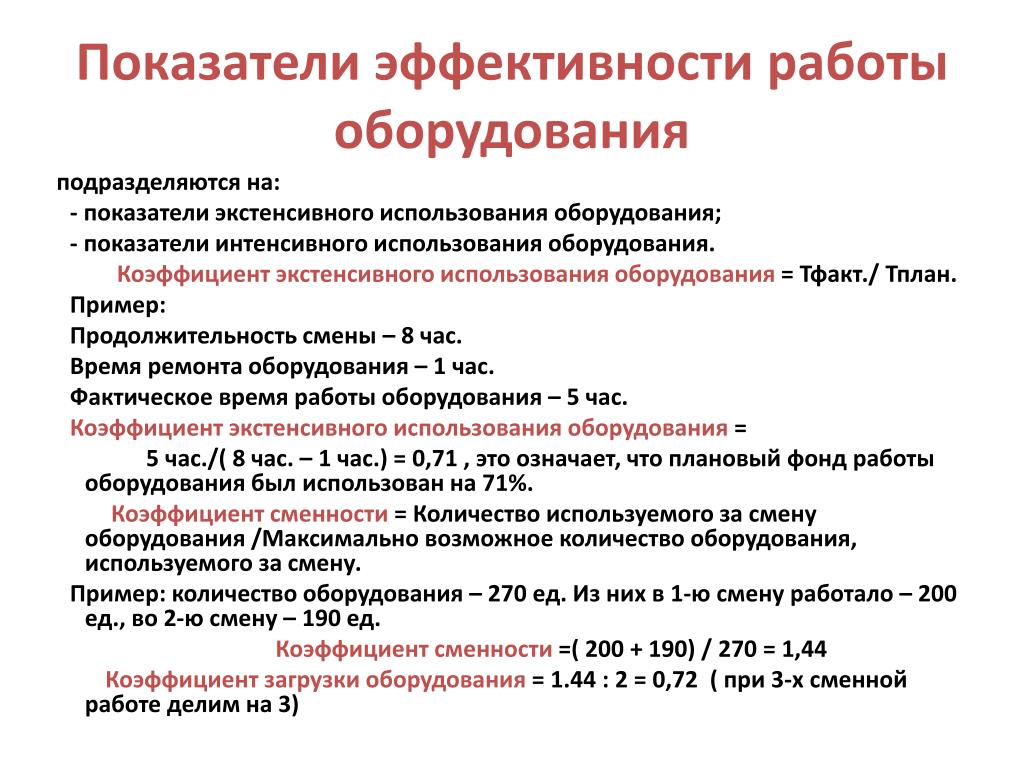
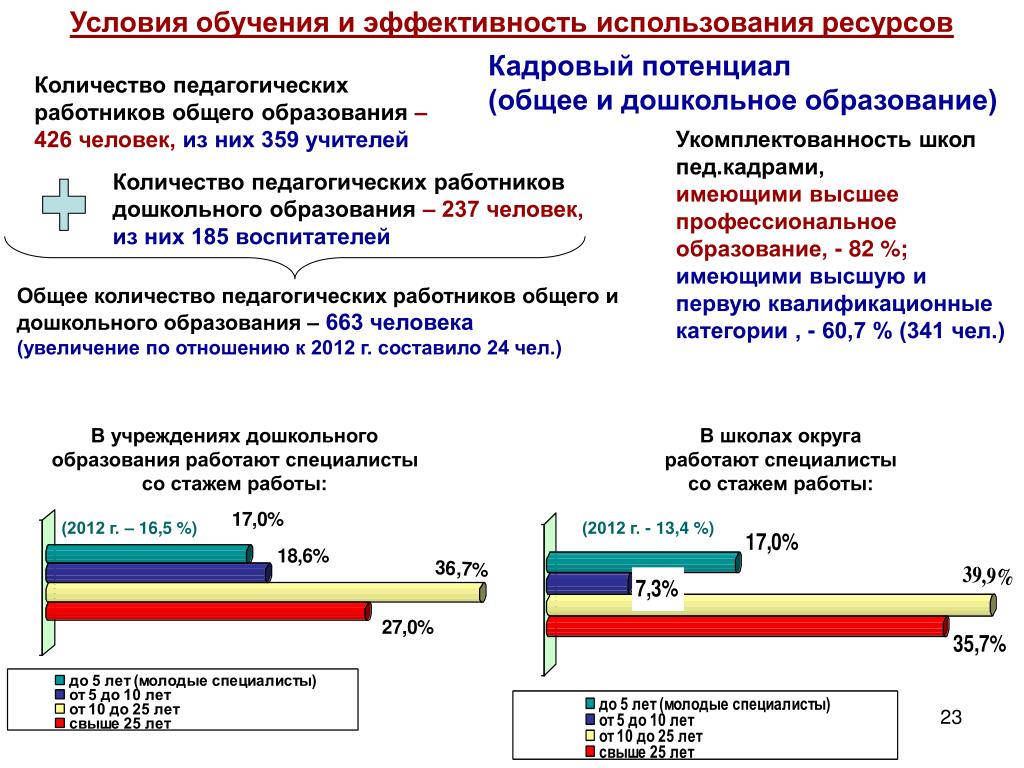
 Это может сэкономить вам деньги за счет уменьшения количества ошибок и предоставления более точной информации.
Это может сэкономить вам деньги за счет уменьшения количества ошибок и предоставления более точной информации.

 Они также могут помочь сотрудникам осознать важную роль, которую они играют в успехе компании, позволяя им более активно участвовать в повышении операционной эффективности.
Они также могут помочь сотрудникам осознать важную роль, которую они играют в успехе компании, позволяя им более активно участвовать в повышении операционной эффективности.


 Технологии удивительны, но есть пределы их чудесам.
Технологии удивительны, но есть пределы их чудесам.
 Они могут достать ноутбук, подключиться к своим коллегам в Интернете и начать работать в ту же минуту, когда они отправятся в путь. Это все равно, что добавить несколько часов к своему дню, не нуждаясь в еще одной чашке кофе, чтобы пережить дополнительное время.
Они могут достать ноутбук, подключиться к своим коллегам в Интернете и начать работать в ту же минуту, когда они отправятся в путь. Это все равно, что добавить несколько часов к своему дню, не нуждаясь в еще одной чашке кофе, чтобы пережить дополнительное время. Дефляция времени здесь, чтобы остаться.
Дефляция времени здесь, чтобы остаться. У них есть функции, которые облегчают повторяющиеся и трудоемкие задачи. К ним относятся такие действия, как сбор и сортировка информации или оплата счетов.
У них есть функции, которые облегчают повторяющиеся и трудоемкие задачи. К ним относятся такие действия, как сбор и сортировка информации или оплата счетов. Это также снижает вероятность человеческой ошибки. Более того, позволяя технологиям выполнять всю тяжелую работу, вы и ваши сотрудники можете сосредоточиться на основных бизнес-задачах и деятельности, приносящей доход.
Это также снижает вероятность человеческой ошибки. Более того, позволяя технологиям выполнять всю тяжелую работу, вы и ваши сотрудники можете сосредоточиться на основных бизнес-задачах и деятельности, приносящей доход.
