 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Параметрическое регулирование скорости асинхронного двигателя. Способы регулирования скорости асинхронного двигателя
Регулирование скорости асинхронного двигателя
 Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна

При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов

Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.

Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания

Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания

При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также - Торможение асинхронного двигателя
electroandi.ru
Способы регулирования скорости асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.6.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0и скольжениемs:
ω = ω0 – sабс
ω = ω0 – ω0s (6.1)
Рис.6.1. Классификация способов регулирования асинхронных двигателей
Исходя из (6.1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора _f1, и числом пар полюсов двигателярп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно. Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменением величины питающего напряжения при постоянной (стандартной) его частоте для асинхронных двигателей с короткозамкнутым ротором имеет ограниченное применение вследствие того, что регулирование скорости здесь сопряжено с потерями энергии скольжения, выделяющимися в роторе двигателя и ведущими к его перегреву. Получаемые при этом способе механические характеристики неблагоприятны для качественного регулирования. Диапазон регулирования не превышает 1,5:1; более глубокое регулирование скорости можно допускать только кратковременно. Исходя из данной оценки, регулирование изменением величины питающего напряжения применяется, главным образом, только для обеспечения плавного пуска нерегулируемых асинхронных электроприводов или для кратковременного снижения скорости. Иногда этот способ регулирования используется для регулирования скорости насосов и вентиляторов (механизмов с вентиляторным характером нагрузки) небольшой мощности (до 15 кВт), однако и в этом случае необходимо увеличение установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирование скорости может производиться воздействием на роторную цепь двигателя. При введении добавочного сопротивления в цепь ротора энергия скольжения рассеивается не в объеме двигателя, а в сопротивлениях. Этот способ регулирования оценивается как неэкономичный. При использовании релейно-контакторных схем исключается плавность регулирования скорости. В настоящее время управление с введением добавочных сопротивлений в цепь ротора используется, в основном, для пуска асинхронных двигателей с фазным ротором. Электроприводы с реостатно-контакторным управлением не рассматриваются нами, как регулируемые электроприводы.
Все способы регулирования, основанные на изменении скольжения асинхронного двигателя, связаны с выделением энергии скольжения в роторной цепи двигателя. В рассматриваемых выше способах эта энергия расходовалась на нагрев обмотки ротора и роторных сопротивлений. Существуют системы регулируемого электропривода, в которых энергия скольжения не теряется в сопротивлениях, а используется полезно – возвращается в питающую сеть, что делает регулирование в этих системах экономичным. К таким системам регулируемого привода относятся асинхронные вентильные каскады и двигатели двойного питания. Особенностью каскадных схем асинхронного привода является ограниченный диапазон регулирования – не больше, чем 2:1. В этом диапазоне каскадные схемы обеспечивают плавное и экономичное регулирование скорости. Такие системы электропривода наиболее целесообразны для мощных турбомеханизмов-насосов и вентиляторов.
studfiles.net
Способы регулирования скорости асинхронного двигателя


Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
 Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
 Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2 : 1 = р2 : pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2 : 1 = Рг : Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
• Скачать схемы обмоток многоскоростных асинхронных двигателей
• Скачать лекцию "Регулирование частоты вращения асинхронных двигателей"
Свежие записи:
ukrlot.com
билеты_ЭМ / 39.Основные способы регулирования скорости асинхронного двигателя. Достоинства и недостатки каждого способа
39) Основные способы регулирования скорости асинхронного двигателя. Достоинства и недостатки каждого способа
Рис.1. Классификация способов регулирования асинхронных двигателей Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0:
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя. Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
-плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных;
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
1
studfiles.net
Параметрическое регулирование скорости асинхронного двигателя.
;.
Способы параметрического регулирования скорости асинхронного двигателя видны из анализа механической характеристики двигателя.
К параметрическим способам регулирования относятся:
Способ изменения активного сопротивления в цепях статора и ротора.
Реостатное регулирование изменением реактивного сопротивления в цепях ротора и статора.
Изменение числа пар полюсов.
Критическое скольжение
;
При введении сопротивления в цепь обмоток фаз ротора меняется критическое скольжение, а критический момент остается постоянным.
Если мы принимаем приведенный ток ротора I'2=const, то, как видно из выражения тока ротора, между скольжением и сопротивлением существует линейная зависимость
;; где- постоянно.
;- изменение сопротивления в цепи ротора.
Механические характеристики могут записаться следующим образом:
;;;
;.
Отметим, что cosасинхронного двигателя при реостатном регулировании скорости двигателя изменением сопротивления в цепи ротора и в случае постоянного момента не изменяется и это следует из следующего выражения
.
Реостатное регулирование асинхронного двигателя изменением сопротивления в цепи статора.
;
1R1>2R1
Из механической характеристики видно, что с увеличением дополнительного активного сопротивления статора уменьшается критический момент, максимальный момент, критическое скольжение и это приводит к сужению рабочего участка и к снижению жесткости.
;
Sне=0,020,13
Регулирование скорости асинхронного двигателя. Изменение числа пар полюсов.
Этот способ применяется для короткозамкнутых двигателей. Регулирование скорости ступенчатое. Принцип такого способа регулирования видно из применения скорости идеального холостого хода .
Для изменения числа пар полюсов необходимо, чтобы в пазы статора были вложены независимые обмотки с разными значениями числа пар полюсов, либо при одной обмотке имелась бы возможность изменять ее схему соединения.
Изменение числа пар полюсов за счет нескольких независимых обмоток приводит к повышенным габаритам двигателя, но при этом возможно любое соотношение числа пар полюсов двигателя. Как правило, многоскоростной двигатель выполнен с двумя независимыми обмотками с отношением числа пар полюсов от 3:1 до 12:1.
Для двигателей с переключением числа пар полюсов и изменением схемы обмотки статора каждой фазы, обмотка состоит из двух частей, в одной из которых меняется направление тока путем переключения этих частей согласно последнему соединению на встречно-последовательное или встречно-параллельное соединение. Такое переключение приводит к уменьшению числа пар полюсов вдвое, но скорость возрастает в два раза.
w0II=w0III=2w0I
При допустимом токе секции равная номинальная мощность для всех соединений будет следующая:
PдопI=3U1I1нcosI– последовательное согласное;
PдопII=3U1I1нcosII– последовательное встречное;
PдопIII=3U12I1нcosIII– последовательное параллельное.
Допустимый момент
;;.
Из полученного выражения видно, что с уменьшением числа пар полюсов с переходом с согласно-последовательного включения на встречно-последовательное включение, допустимая мощность остается постоянной, т.е. регулирование скорости производится при постоянной мощности. Тогда как при увеличении скорости перехода согласно- последовательного включения на параллельное включение, допустимый момент не изменяется, т.е. регулирование идет с постоянным моментом.
;
;
.
;.
Механические характеристики.
При параллельном соединении перегрузочная способность растет вдвое. Наибольшее практичное применение получили схемы переключения со звезды на двойную звезду и переключение с треугольника на двойную звезду.
Переключение с треугольника на двойную звезду. Характеристики аналогичны схеме переключения согласно-последовательного включения на параллельное, т.е. идет регулирование при постоянном моменте.
Допустимая мощность:
;
РдопРдоп,т.к.cosтреугольника за счет потребления реактивной энергии больше.
coscosза счет потребления реактивной энергии.
;;.
;;
;;.
Из всех параметрических способов регулирования скорости изменение числа пар полюсов наиболее прост для практической реализации, и наиболее экономичен, так как в нем значительно меньше максимальные потери скольжения.
studfiles.net
11. Способы регулирования скорости асинхронных двигателей
Из соотношения
следует, что существует два принципиально отличных друг от друга способа регулирования скорости АД: изменением скорости вращения электромагнитного поля статора и изменением скольженияs. В свою очередь, величина зависит от числа пар полюсов р и частоты напряжения статора. Для выявления причин изменения скольжения проанализируем выражение вращающего момента АД:
.
Очевидно, что при постоянных величинах числа пар полюсов p, частоты напряжения статора и вращающего момента М скольжение зависит от напряжения, а также активных и реактивных сопротивлений цепей статора и ротора.
Отсюда следует классификация практических способов регулирования скорости АД
18. Пуск в ход асинхронных двигателей
Основные требования, предъявляемые при пуске двигателей:
а) пуск по возможности должен осуществляться просто, без сложных пусковых устройств; б) пусковой момент должен быть достаточным для приведения в движение исполнительного органа рабочей машины; в) пусковые токи должны быть по возможности малыми для того, чтобы они не создавали чрезмерных динамических усилий на ИО РМ и превышения температуры обмотки двигателя.
Иногда к этим требованиям добавляются необходимость плавного пуска (например, в электроприводах лифтов), максимального пускового момента и другие.
Практически применяют следующие способы пуска: а) прямой пуск;
Используется для асинхронных двигателей с короткозамкнутым ротором малой и средней мощности. Последние обычно проектируются так, что при непосредственном подключении к сети не создаются опасные электродинамические усилия и нагрев обмоток.
б) понижение напряжения, подводимого к обмотке статора;
Используют для АД с короткозамкнутым ротором большой мощности, а также для АД средней мощности при недостаточно мощных электрических сетях (мощность сети соизмерима с мощностью АД). в) подключение секционированного пускового реостата (добавочного сопротивления) к обмотке ротора АД с фазным ротором.
Как было показано выше, при увеличении активного сопротивления цепи ротора растет критическое скольжение и пусковой момент. Полное сопротивление пускового реостата рассчитывается так, чтобы пусковой момент был равен критическому (максимальному). По мере разгона двигателя сопротивление реостата уменьшают, замыкая отдельные секции с помощью ключа. В конце пуска реостат полностью замкнут и двигатель переходит на работу на естественной механической характеристике
22. Способы пуска синхронного двигателя
Одним из основных недостатков СД являются его плохие пусковые свойства – при подключении обмоток статора и ротора к источникам питания двигатель не развивает пускового момента. За один период изменения токов в обмотках статора электромагнитный момент будет дважды менять свое направление, т. е. магнитное поле статора будет подвергать ротор равным по величине, но противоположным по направлению механическим воздействиям. Ротор из-за своей инерционности не может разогнаться до синхронной скорости (когда направление механических воздействий на него одинаково) в течение одного полупериода питающего напряжения и остается неподвижным.
Таким образом, пуск СД состоит из двух этапов: 1) асинхронный разгон при отсутствии возбуждения () до величины подсинхронной скорости; 2) втягивание в синхронизм после включения тока в обмотку возбуждения. При этом необходимо, чтобы на подсинхронной скорости вращающий момент пусковой обмотки (момент втягивания в синхронизм) был больше, чем момент сопротивления исполнительного органа рабочей машины.
В зависимости от соотношения мощности питающей сети и синхронного двигателя его пуск может происходить без ограничения пускового тока (прямой пуск) или с ограничением. В последнем случае СД подключается к сети через реакторы, автотрансформаторы или тириcторные устройства “мягкого” пуска.
studfiles.net
Регулирование скорости вращения асинхронных двигателей.
Скорость вращения ротора асинхронных двигателей определяют из выражения
N2 = n1 (1 – s) = 60f / р (l – s),
откуда следует, что скорость ротора можно регулировать, изменяя частоту тока питающей сети f, число пар полюсов статорной обмотки р и величину скольжения s.
Регулирование скорости вращения путём изменения величины скольжения s можно применять только для двигателей с фазным ротором, для чего в цепь ротора вводят регулировочный реостат. Плавное изменение сопротивления этого реостата приводит к плавному изменению величины скольжения и, следовательно, - скорости вращения двигателя. Таким способом можно регулировать скорость вращения только нагруженного двигателя в пределах от 1 до 0,7 номинальной скорости вращения ротора. В режиме холостого хода изменение активного сопротивления цепи ротора почти не влияет на скорость вращения.
Рассмотренный способ регулирования имеет два недостатка: большие потери энергии в реостате и сильное влияние тормозного момента на скорость вращения. Однако этот способ регулирования получил широкое распространение.
Регулирование скорости изменением числа пар полюсов не позволяет получать плавного изменения скорости вращения. Этот способ применяется в основном у двигателей с короткозамкнутой обмоткой ротора и даёт возможность осуществлять лишь ступенчатое регулирование, что легко установить из выражения для скорости вращения магнитного поля n = 60f / р. При частоте тока f = 50 гц и различных значениях числа пар полюсов р можно получить 3000, 1500, 1000, 750 и 600 об/мин. Промышленность выпускает многоскоростные асинхронные двигатели, у которых каждая фаза статорной обмотки состоит из нескольких отдельных частей. Соединение этих частей различным способом даёт возможность изменять число пар полюсов, следовательно, и скорость вращения двигателя.
Многоскоростные асинхронные двигатели применяют в подъёмно-транспортных механизмах, насосах и других установках, в которых не требуется плавность регулирования скорости. В тех случаях, когда необходимо плавное регулирование скорости электропривода, могут быть использованы системы электромеханического регулирования скорости вращения (например, механические вариаторы, электромагнитные муфты скольжения, порошковые муфты и другие). В качестве примера рассмотрим схему электропривода серии ПМС с асинхронным двигателем и электромагнитной муфтой скольжения (рис.56 а).
Муфта скольжения – 1 состоит из ведущего массивного якоря – Я и индуктора – И с катушкой возбуждения – К. Якорь муфты соединён валом – 2 приводного двигателя, а индуктор с валом рабочего механизма – 3. В катушку возбуждения индуктора через контактные кольца – 4 подаётся постоянный ток Iн от выпрямителя – 5.
Приводной двигатель вращает якорь электромагнитной муфты с постоянной скоростью. При этом якорь пересекает магнитные силовые линии, созданные током Iн катушки возбуждения индуктора, и в нём возникают вихревые токи. В результате взаимодействия этих токов с магнитным полем появляются электромагнитные силы, увлекающие индуктор, а с ним и ведомый вал рабочего механизма. Так же, как и в асинхронном двигателе, индуктор вращается медленнее якоря. Величину скольжения муфты определяют по формуле:
S = (n1 – n2) / n1
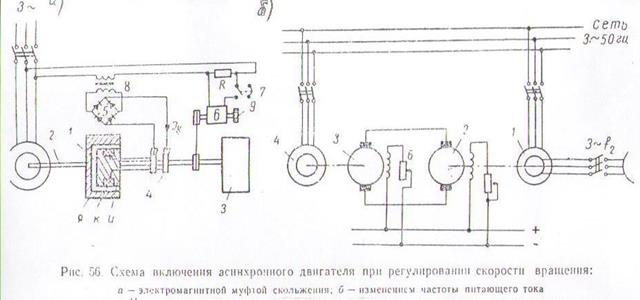
Для плавного регулирования скорости вращения индуктора необходимо изменить ток возбуждения Iв. Повышение жёсткости механических характеристик привода обеспечивается центробежным регулятором – 6 путём автоматического изменения тока возбуждения индуктора. Если скорость вращения вала рабочего механизма меньше заданной, контакты – 7 центробежного регулятора замыкаются, шунтируя сопротивление R. В этом случае через катушку возбуждения индуктора пойдёт максимальный ток и скорость вращения индуктора возрастёт. Наоборот, при увеличении скорости вращения вала контакты центробежного регулятора размыкаются и ток, проходящий через первичную обмотку трансформатора – 8, уменьшается. При этом ток возбуждения Iв падает, индуктор вращается медленнее, контакты центробежного регулятора снова замыкаются и т.д. В рассмотренной схеме контакты замыкаются и размыкаются от 10 до 40 раз в секунду, что позволяет поддерживать скорость вращения вала рабочего механизма фактически равной заданной скорости, устанавливаемой поворотом рукоятки – 9 центробежного регулятора.
Регулирование скорости изменением частоты тока, питающего обмотку статора асинхронного двигателя, позволяет получить плавное регулирование в широких пределах. При этом способе используется преобразователь частоты тока (рис. 56 б), состоящий из асинхронного преобразователя частоты – 1, двигателя – 2, генератора – 3 постоянного тока и асинхронного двигателя – 4.
Асинхронный двигатель – 4, питаемый из сети током нормальной частоты f = 50 гц, приводит во вращение генератор постоянного тока – 3, служащий источником электрической энергии для двигателя постоянного тока – 2. Этот двигатель вращает асинхронный преобразователь – 1, являющийся источником электрической энергии переменной частоты для асинхронного двигателя привода – 5. При помощи регулировочного реостата – 6 изменяется напряжение генератора и, следовательно, скорость вращения двигателя постоянного тока. Это в свою очередь вызывает изменение частоты тока f2, вырабатываемого асинхронным преобразователем – 1.
Рассмотренный частотный способ регулирования скорости вращения двигателя требует сложной и дорогостоящей аппаратуры и применяется главным образом для одновременного регулирования скорости группы асинхронных двигателей.
Похожие статьи:
poznayka.org




423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)