 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Большая Энциклопедия Нефти и Газа. Электрогидравлический привод
Электрогидравлический привод - Большая Энциклопедия Нефти и Газа, статья, страница 1
Электрогидравлический привод
Cтраница 1
Электрогидравлический привод со смешанным управлением в функции пути и давления часто применяется в технологическом оборудовании для выполнения ряда вспомогательных действий, связанных с зажимом и освобождением изделия. Привод часто оформляют в виде типовой гидропанели, которая в сочетании с двухнасосной станцией ( рис. 5.36) позволяет выполнить быстрый подвод зажимного элемента в соприкосновение с изделием, зажим, быстрый отвод зажимного элемента, останов и возврат в исходное положение. [2]
Электрогидравлические приводы обладают наиболее существенными преимуществами электрических и гидравлических приводов: возможностью применения электрических и корректирующих устройств цепей самонастройки, точным заданием программы управления с помощью электрических сигналов. [3]
Электрогидравлические приводы могут быть выполнены по однокаскадной или двухкаскадной схеме. Построение привода зависит от требуемой мощности на выходе, точности позиционирования и от других факторов. [4]
Электрогидравлический привод ( см. рис. 7.19) состоит из трех основных частей: копировального прибора с выходным блоком. [6]
Электрогидравлические приводы широко используются в ПР большой ( 50 - 100 кг) и сверхбольшой ( более 100 кг) грузоподъемности. [7]
Электрогидравлические приводы осуществляют параллельный и наклонный подъем хобота, перемещающегося во время ковки при помощи шарнирных подвесок в любом направлении. Удары, передающиеся на хобот, воспринимаются пружинными амортизаторами, расположенными в вертикальной плоскости вдоль оси ковки и в поперечном направлении. [9]
Электрогидравлические приводы роботов применяются в основном двух классов: дроссельного управления и объемного управления, причем дроссельное управление различается на управление с гидронасосом постоянной подачи и переменной подачи. Во всех случаях может происходить управление либо гидроцилиндром, либо гидро мотором. [11]
Электрогидравлические приводы подач строятся на основе электромеханического либо шагового преобразователя. [13]
Электрогидравлические приводы роботов имеют сложную динамическую структуру и должны удовлетворять высоким энергетическим и динамическим требованиям. При разработке таких приводов необходимо учитывать большое число технических требований, которые, как правило, противоречивы. Поэтому трудно корректно сформулировать единый критерий качества для разрабатываемых приводов, использование которого позволило бы полностью автоматизировать проектирование, начиная с ввода технического задания и кончая выдачей рассчитанных значений конструктивных параметров привода. Таким образом, технические требования, предъявляемые к приводам современных роботов, предопределяют их проектирование как интерактивный процесс, позволяющий рационально распределить функции между проектировщиком и ЭВМ. [14]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Электрогидравлический следящий привод - Большая Энциклопедия Нефти и Газа, статья, страница 1
Электрогидравлический следящий привод
Cтраница 1
Электрогидравлический следящий привод с объемным регулированием имеет силовую часть, состоящую из регулируемого объемного насоса, гидродвигателя, вспомогательных устройств, и управляющую часть, которой служит электрогидравлический привод с дроссельным регулированием. Электрогидравлические приводы с объемным регулированием различаются принципиальной схемой, конструкцией гидромашин силовой части, видом элементов управляющей части, типом корректирующих устройств и другими признаками. [1]
Электрогидравлический следящий привод состоит из четырех элементов: электромеханического преобразователя, гидравлического усилителя, гидродвигателя и системы обратной связи. Каждый из элементов соответственно характеризуется следующими параметрами: предельно возможная вероятность безотказной работы Р1оо Р2оо Р3оо Р4оо 0 99; удельные стоимости а, 1 2; О2 2 5; а3 3; а4 1.0 выражены в условных единицах. [2]
Электрогидравлический следящий привод был применен при этом для перемещения поперечного суппорта токарного многорезцового станка Берингер, оснащенного ранее механическим копировальным устройством. [3]
Электрогидравлические следящие приводы применяют в средних и тяжелых станках с программным управлением. [4]
Электрогидравлические следящие приводы о дроссельным регулированием могут различаться по типу исполнительных двигателей, числу ступеней усиления сигналов управления, наличию или отсутствию корректирующих элементов и дополнительных обратных связей. Однако все особенности принципиальных схем и конструктивного исполнения электрогидравлических приводов с дроссельным регулированием не препятствуют построению их структурных схем по общей методике, которая состоит в том, что сначала соединяют вместе структурные схемы электрогидравлического усилителя и исполнительного гидродвигателя, а затем полученная таким образом прямая цепь замыкается обратной связью по положению выходного звена привода. Если для корректирования характеристик привода необходимы дополнительные элементы или дополнительные обратные связи, то они должны быть добавлены к указанным выше основным блокам структурной схемы. При этом могут появиться новые замкнутые контуры внутри основного контура привода, а также могут измениться и параметры отдельных звеньев. [6]
Электрогидравлические следящие приводы снабжены одно -, двух - или трехкаскадньш электрогидравлическим усилителем. Рассматриваемая распределительно-дросселирующая пара золотник-втулка представляет собой выходной каскад электрогидравлического усилителя. Однако с увеличением значения л р более 1 мм существенно снижается быстродействие электрогидравлического усилителя. [7]
Линейные электрогидравлические следящие приводы ( ЛЭГСП) имеют усилитель напряжения, электромеханический преобразователь ( ЭМП), гидроусилитель типа сопло-заслонка ( см. рис. 70), силовой цилиндр и датчик перемещения рабочего органа. Сигнал управления приводом формируется в виде рассогласования между сигналом U программы и сигналом у фактического положения или перемещения рабочего органа. [8]
Рассмотрим электрогидравлические следящие приводы с различными обратными связями. На рис. 6.34 показан привод, который состоит из электрического усилителя-сумматора 1, элекгрогид-равлического усилителя 2, гидродвигателя 5 и датчика отрицательной обратной связи по положению. Обязательной принадлежностью конструкции следящего ЭГП является фильтр 3, который обычно монтируется или на корпусе ЭГУ, или на корпусе гидродвигателя. [10]
В электрогидравлических следящих приводах электрогидравлические преобразователи обычно состоят из электромеханического преобразователя и гидравлического усилителя. [11]
В электрогидравлическом следящем приводе перемещение датчика вызывает появление электрического сигнала, который усиливается и затем преобразуется в механическое перемещение золотника. [12]
В роторном электрогидравлическом следящем приводе ( РЭГСП) исполнительным двигателем, как и в РШЭГП, обычно является аксиально-поршневой гидромотор. Гидравлический усилитель мощности ( ГУ) - двухкаскадный. В первом каскаде может быть использован гидроусилитель типа сопло-заслонка, второй каскад - следящий гидрораспределитель. [13]
При корректировании электрогидравлических следящих приводов с дроссельным регулированием с помощью электрических устройств используют различные вспомогательные контуры, которые составлены из элементов, обладающих емкостью, индуктивностью и активным сопротивлением. Соединения из таких элементов позволяют получить динамические звенья с характеристиками, близкими к характеристикам форсирующих звеньев первого и второго порядков, или реальные дифференцирующие звенья ( см. гл. [14]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Электрогидравлический привод - Большая Энциклопедия Нефти и Газа, статья, страница 2
Электрогидравлический привод
Cтраница 2
Электрогидравлические приводы роботов применяются в основном двух классов: дроссельного управления и объемного управления, причем дроссельное управление различается на управление с гидронасосом постоянной подачи и переменной подачи. Во всех случаях может происходить управление либо гидроцилиндром, либо гидромотором. [16]
Гидравлические и электрогидравлические приводы находят применение в подъемно-транспортных ПР грузоподъемностью 10 кг и выше с цикловой, позиционной и контурной СПУ. В технологических ПР гидроприводы и электрогидравлические приводы применяют при меньшей грузоподъемности. Например, окрасочный ПР Колер грузоподъемностью 3 кг снабжен гидроприводом. [17]
У электрогидравлических приводов хорошие характеристики: при наличии обратной связи по положению, скорости, со стабилизирующей коррекцией и скоростным сигналом управления они позволяют получить отношение максимальной скорости к минимальной D 1000 - 10 000, наибольшую скорость движения до 5000 - 10 000 мм / мин, коэффициент усиления по скорости 20 - 100, скоростную ошибку О-003 мм и общую нечувствительность ( 0 01 - 0 001) мм. Но они нестабильно работают при изменении температуры, и расчет их трудоемок. [18]
При электрогидравлическом приводе вспомогательная пружина отсутствует. [19]
В электрогидравлическом приводе ( ЭГП) с широтно-импульсным ( ШИ) управлением информация о динамическом состоянии некоторых его элементов передается не в виде непрерывных сигналов, а в виде импульсов той или иной формы и постоянной частоты, называемой несущей. В зависимости от соотношения несущей частоты и динамики элемента различают элементы дискретные и импульсные. Если при подаче на вход элемента последовательности импульсов выходную координату можно представить в виде последовательности импульсов той или иной формы, то такой элемент называется дискретным. Если же элемент реагирует на среднее за период значение дискретного входного сигнала, то такой элемент называется импульсным. Очевидно, что один и тот же элемент может быть как дискретным, так и импульсным. Все зависит от несущей частоты. Обычно считают, что если период несущей частоты вдвое больше постоянной времени элемента, то это все еще дискретный режим; при большей частоте-импульсный. Введенные здесь понятия нужны для описания работы ЭГП в различных режимах ШИ управления. [21]
В многоканальных электрогидравлических приводах ( ЭГП) кроме отказов гидравлических элементов могут иметь место отказы электрической части и разброс входных сигналов управления каждого канала. [22]
Каретка имеет электрогидравлический привод. [23]
Устройство имеет электрогидравлический привод, его центрирующие элементы разжимаются независимо один от другого, а сжимаются одновременно. [25]
Состоят из электрогидравлического привода центрирующих элементов, которые разжимаются независимо друг от друга. В комплекте с самоходным устройством СЦ121 центраторы ( кроме ЦВЮН) можно эффективно использовать для сборки и сварки труб в секции на полевых стеллажах. [27]
Гидростанция для шаговых электрогидравлических приводов типа Г48 - 44, разработанная ЭНИМСом, включает в себя резервуар для масла, насосный агрегат, системы подпитки, фильтрации и охлаждения рабочей жидкости, а также необходимую контрольно-регулирующую гидроаппаратуру. [28]
Обособленной группой электрогидравлических приводов тормозных устройств являются приводы с плунжерными или шестеренчатыми насосами, соединяемыми внешними трубопроводами с цилиндрами управления тормозов. Этот агрегат может быть установлен в любом месте независимо от тормоза и соединен с цилиндром 19, размыкающим тормоз напорным и сливным трубопроводами. [29]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Электрогидравлический привод
Использование: в системах нагружения испытательных стендов и в системах управления самолетов, подъемно-транспортных и других машин. Сущность изобретения: обмотка управления электромеханического преобразователя электрогидравлического усилителя мощности подключена к выходу электронного блока управления, один выход к-рого соединен с выходом задатчика управляющего сигнала. Каждая рабочая полость дифференциального гидроцилиндра соединена с источником питания постоянного давления и сливом через индивидуальный электрогидравлический усилитель мощности, обмотки управления преобразователей к-рых подключены к разным выходам электронного блока управления. Отношение электрических сигналов на выходах электронного блока управления равно отношению эффективных площадей поршня гидроцилиндра со стороны его соответствующих рабочих полостей, возведенному в степень с показателем, определяемым для обоих возможных направлений движения выходного звена гидроцилиндра исходя из заданной системы неравенств. 1 ил.
Изобретение относится к области объемного гидропривода, а именно к электрогидравлическим приводам с дроссельным управлением и дифференциальными гидроцилиндрами, и может быть использовано, например, в системах нагружения испытательных стендов и в системах управления самолетов, подъемно-транспортных и других машин.
Известен электрогидравлический привод, содержащий источник питания постоянного давления, дифференциальный гидроцилиндр и электрогидравлический усилитель мощности, обмотка управления электромеханического преобразователя которого подключена к выходу электронного блока управления, один из входов которого соединен с выходом задатчика управляющего сигнала (1). В данном электрогидравлическом приводе одна из рабочих полостей дифференциального гидроцилиндра соединена с источником питания постоянного давления и сливом через электрогидравлический усилитель мощности, а другая рабочая полость гидроцилиндра непосредственно соединена со сливом, вследствие чего на выходном звене гидроцилиндра возможно создание усилий только одного знака (направления), что ограничивает область применения известного привода и является его техническим недостатком. Наиболее близким по технической сущности к заявляемому объекту является принятый в качестве прототипа электрогидравлический привод, содержащий источник питания постоянного давления, дифференциальный гидроцилиндр и электрогидравлический усилитель мощности, обмотка управления электромеханического преобразователя которого подключена к выходу электронного блока управления, один из входов которого соединен с выходом задатчика управляющего сигнала (2). Если потери давления на рабочем окне выходного каскада электрогидравлического усилителя мощности, сообщающем со сливом рабочую полость гидроцилиндра, со стороны которой эффективная площадь поршня имеет меньшее значение, в силу соответствующей величины попутной (совпадающей по направлению со скоростью движения выходного звена гидроцилиндра) нагрузки близки к значению давления питания электрогидравлического привода, то в другой рабочей полости гидроцилиндра, которая при этом сообщается с выходом источника питания, и, таким образом, является напорной, давление снижается до упругости насыщенного пара рабочей жидкости и начинается кавитация, что отрицательно сказывается на характеристиках работы привода в целом, т.е. является его техническим недостатком. Параметры гидропривода с дроссельным управлением выбирают, в первую очередь, исходя из условия обеспечения требуемого закона движения объекта управления, или, говоря другими словами, из условия совместимости диаграммы нагрузки, представляющей собой связь потребных усилия на выходном звене гидродвигателя и скорости его движения, и механической характеристики гидропривода, представляющей собой зависимость скорости движения выходного звена гидродвигателя, которую может обеспечить привод, от нагружения на этом звене. Суть указанного условия состоит в том, что диаграмма нагрузки всеми своими точками должна располагаться внутри области скоростей и усилий на выходном звене гидродвигателя, обеспечиваемых согласно механической характеристике гидропривода, то есть при любом допустимом значении нагрузки должна обеспечиваться скорость движения выходного звена гидродвигателя, не меньшая той, что требуется по диаграмме нагрузки. Для исключения кавитационных явлений при работе с попутной нагрузкой на выходном звене рассматриваемого электрогидравлического привода с дроссельным управлением и дифференциальным гидроцилиндром приходится завышать давление питания привода по сравнению со значением, необходимым при прочих равных условиях из условия обеспечения требуемого закона движения объекта управления. Завышение величины давления питания известного электрогидравлического привода приводит к повышенным потерям энергии при его эксплуатации, что также является его техническим недостатком. Технической задачей данного изобретения является создание электрогидравлического привода с дроссельным управлением и дифференциальным гидроцилиндром, обладающего пониженными потерями энергии и повышенными динамической жесткостью и частотой собственных колебаний и исключающего кавитационные явления в полостях гидроцилиндра при нагружении выходного звена последнего попутным усилием. Сущность изобретения заключается в том, что в электрогидравлическом приводе, содержащем источник питания постоянного давления, дифференциальный гидроцилиндр и электрогидравлический усилитель мощности, обмотка управления электромеханического преобразователя которого подключена к выходу электронного блока управления, один из входов которого соединен с выходом задатчика управляющего сигнала, каждая из рабочих полостей дифференциального гидроцилиндра соединена с источником питания и сливом через индивидуальный электрогидравлический усилитель мощности, обмотки управления электромеханических преобразователей которых подключены к разным выходам электронного блока управления, причем отношение электрических сигналов на упомянутых выходах электронного блока управления равно отношению эффективных площадей поршня дифференциального гидроцилиндра со стороны его соответствующих рабочих полостей, возведенному в степень с показателем R, определяемым для обоих возможных направлений движения выходного звена гидроцилиндра из системы неравенств: где Aнп, Aсп эффективные площади поршня дифференциального гидроцилиндра соответственно со стороны его напорной и сливной полостей; fнп, fсп коэффициенты пропорциональности переменных составляющих силы трения в подвижных парах гидроцилиндра значениям давления рабочей жидкости соответственно в напорной и сливной полостях гидроцилиндра;
где Aнп, Aсп эффективные площади поршня дифференциального гидроцилиндра соответственно со стороны его напорной и сливной полостей; fнп, fсп коэффициенты пропорциональности переменных составляющих силы трения в подвижных парах гидроцилиндра значениям давления рабочей жидкости соответственно в напорной и сливной полостях гидроцилиндра;  постоянная составляющая силы трения в подвижных парах гидроцилиндра; Pсл давление слива; Рп давление рабочей жидкости, создаваемое источником питания постоянного давления; Rпопmax максимально возможное значение попутной нагрузки на выходном звене гидроцилиндра; PдопminPдопmax соответственно минимальное и максимальное допустимые значения давления в рабочих полостях гидроцилиндра. Соединение каждой из рабочих полостей дифференциального гидроцилиндра с источником питания постоянного давления и сливом через индивидуальный электрогидравлический усилитель мощности, обмотки управления электромеханических преобразователей которых подключены к разным выходам электронного блока управления, и обеспечение равенства отношения электрических сигналов на упомянутых выходах электронного блока управления отношению эффективных площадей поршня дифференциального гидроцилиндра со стороны его соответствующих рабочих полостей в степени с показателем R, определяемым из приведенной выше системы неравенств, обеспечивают при принятом значении давления питания электрогидравлического привода и прочих условиях: исключение в процессе работы привода уменьшения давления в рабочих полостях дифференциального гидроцилиндра ниже допустимой величины Pдопmin и, соответственно, исключение кавитационных явлений в полостях гидроцилиндра, исключение увеличения давления в полостях гидроцилиндра сверх допустимой величины Pдопmax, а также одновременное изменение в противофазе давления в обеих рабочих полостях гидроцилиндра во всем рабочем диапазоне изменения нагрузок на его выходном звене. В силу последнего обстоятельства (по сравнению со случаем, когда уменьшение давления в полостях гидроцилиндра ограничивается определенным уровнем посредством системы подпитки) предлагаемый электрогидравлический привод обладает повышенными значениями динамической жесткости и частоты собственных колебаний. На чертеже изображена структурная схема электрогидравлического привода. Электрогидравлический привод, включает в себя дифференциальный гидроцилиндр 1, каждая из рабочих полостей 2 и 3 которого через индивидуальный электрогидравлический усилитель мощности соединена с источником питания постоянного давления 4 и сливом, а именно: полость 2 через усилитель 5, а полость 3 через усилитель 6. Электрогидравлические усилители мощности 5 и 6 выполнены идентичными и имеют конструкцию, обеспечивающую пропорциональность площади (в соответственно и проводимости) рабочих окон, открываемых дросселирующим золотником выходного каскада усиления, величине управляющего электрического сигнала на обмотке управления электромеханического преобразователя усилителя (на чертеже дросселирующие золотники и электромеханические преобразователи электрогидравлических усилителей мощности 5 и 6 не показаны). Это могут быть усилители мощности с подпружиненным относительно корпуса дросселирующим золотником или с неподпружиненным золотником и механической силовой, гидромеханической, либо электрической обратной отрицательной связью по положению золотника. Обмотки управления электромеханических преобразователей электрогидравлических усилителей мощности 5 и 6 подключены к разным выходам электронного блока управления 7, причем отношение электрических сигналов на упомянутых выходах электронного блока управления 7 равно отношению эффективных площадей поршня дифференциального гидроусилителя 1 со стороны его соответствующих рабочих полостей, возведенному в степень с показателем R, определяемым из системы неравенств:
постоянная составляющая силы трения в подвижных парах гидроцилиндра; Pсл давление слива; Рп давление рабочей жидкости, создаваемое источником питания постоянного давления; Rпопmax максимально возможное значение попутной нагрузки на выходном звене гидроцилиндра; PдопminPдопmax соответственно минимальное и максимальное допустимые значения давления в рабочих полостях гидроцилиндра. Соединение каждой из рабочих полостей дифференциального гидроцилиндра с источником питания постоянного давления и сливом через индивидуальный электрогидравлический усилитель мощности, обмотки управления электромеханических преобразователей которых подключены к разным выходам электронного блока управления, и обеспечение равенства отношения электрических сигналов на упомянутых выходах электронного блока управления отношению эффективных площадей поршня дифференциального гидроцилиндра со стороны его соответствующих рабочих полостей в степени с показателем R, определяемым из приведенной выше системы неравенств, обеспечивают при принятом значении давления питания электрогидравлического привода и прочих условиях: исключение в процессе работы привода уменьшения давления в рабочих полостях дифференциального гидроцилиндра ниже допустимой величины Pдопmin и, соответственно, исключение кавитационных явлений в полостях гидроцилиндра, исключение увеличения давления в полостях гидроцилиндра сверх допустимой величины Pдопmax, а также одновременное изменение в противофазе давления в обеих рабочих полостях гидроцилиндра во всем рабочем диапазоне изменения нагрузок на его выходном звене. В силу последнего обстоятельства (по сравнению со случаем, когда уменьшение давления в полостях гидроцилиндра ограничивается определенным уровнем посредством системы подпитки) предлагаемый электрогидравлический привод обладает повышенными значениями динамической жесткости и частоты собственных колебаний. На чертеже изображена структурная схема электрогидравлического привода. Электрогидравлический привод, включает в себя дифференциальный гидроцилиндр 1, каждая из рабочих полостей 2 и 3 которого через индивидуальный электрогидравлический усилитель мощности соединена с источником питания постоянного давления 4 и сливом, а именно: полость 2 через усилитель 5, а полость 3 через усилитель 6. Электрогидравлические усилители мощности 5 и 6 выполнены идентичными и имеют конструкцию, обеспечивающую пропорциональность площади (в соответственно и проводимости) рабочих окон, открываемых дросселирующим золотником выходного каскада усиления, величине управляющего электрического сигнала на обмотке управления электромеханического преобразователя усилителя (на чертеже дросселирующие золотники и электромеханические преобразователи электрогидравлических усилителей мощности 5 и 6 не показаны). Это могут быть усилители мощности с подпружиненным относительно корпуса дросселирующим золотником или с неподпружиненным золотником и механической силовой, гидромеханической, либо электрической обратной отрицательной связью по положению золотника. Обмотки управления электромеханических преобразователей электрогидравлических усилителей мощности 5 и 6 подключены к разным выходам электронного блока управления 7, причем отношение электрических сигналов на упомянутых выходах электронного блока управления 7 равно отношению эффективных площадей поршня дифференциального гидроусилителя 1 со стороны его соответствующих рабочих полостей, возведенному в степень с показателем R, определяемым из системы неравенств:  (1)
(1) (2) где Aнп, Aсп эффективные площади поршня дифференциального гидроцилиндра 1 соответственно со стороны его напорной и сливной полостей; fнп, fсп коэффициенты пропорциональности переменных составляющих силы трения в подвижных парах гидроцилиндра 1 значениям давления рабочей жидкости соответственно в напорной и сливной полостях гидроцилиндра; постоянная состоящая силы трения в подвижных парах гидроцилиндра 1; Pсл давление слива; Pп давление рабочей жидкости, создаваемое источником питания постоянного давления 4; Rпопmax максимально возможное значение попутной нагрузки на выходном звене гидроцилиндра 1 при рассматриваемом направлении движения выходного звена; Pдопmin, Рдопmax соответственно минимальное и максимальное допустимые значения давления в рабочих полостях гидроцилиндра 1. Выходным звеном дифференциального гидроцилиндра 1 в зависимости от способа его установки может быть шток или корпус гидроцилиндра. Один из выходов электронного блока управления 7 соединен с выходом задатчика 8 управляющего сигнала. В зависимости от значения и области применения электрогидравлического привода другие входы электронного блока 7 могут быть соединены через устройства обратной связи с датчиками контролируемых параметров (на чертеже устройства обратной связи и датчики контролируемых параметров не показаны). Электронный блок управления 7 предназначен для формирования (на основании поступающих на его входы сигналов от задатчика 8 и устройств обратной связи) усиленных электрических сигналов для управления электрогидравлическими усилителями мощности 5 и 6. Электрогидравлический привод работает следующим образом. При поступлении на соответствующий вход электронного блока 7 управляющего сигнала с выхода задатчика 8 на выходах блока 7, к которым подключены обмотки управления электромеханических преобразователей электрогидравлических усилителей мощности 5 и 6 (на чертеже электромеханические преобразователи не показаны), формируются усиленные электрические сигналы, которые отличаются в (А2/А3)R раз, где А2, А3 эффективные площади поршня дифференциального гидроцилиндра 1 соответственно со стороны его рабочих полостей 2 и 3. На нарушая общности рассуждений, для определенности положили, что в рассматриваемом случае рабочая полость 2 дифференциального гидроцилиндра 1 посредством усилителя 5 сообщается с источником питания постоянного давления 4, то есть является напорной, а полость 9 гидроцилиндра 1 посредством усилителя 6 сообщается со сливом, то есть является сливной. При этом A2
(2) где Aнп, Aсп эффективные площади поршня дифференциального гидроцилиндра 1 соответственно со стороны его напорной и сливной полостей; fнп, fсп коэффициенты пропорциональности переменных составляющих силы трения в подвижных парах гидроцилиндра 1 значениям давления рабочей жидкости соответственно в напорной и сливной полостях гидроцилиндра; постоянная состоящая силы трения в подвижных парах гидроцилиндра 1; Pсл давление слива; Pп давление рабочей жидкости, создаваемое источником питания постоянного давления 4; Rпопmax максимально возможное значение попутной нагрузки на выходном звене гидроцилиндра 1 при рассматриваемом направлении движения выходного звена; Pдопmin, Рдопmax соответственно минимальное и максимальное допустимые значения давления в рабочих полостях гидроцилиндра 1. Выходным звеном дифференциального гидроцилиндра 1 в зависимости от способа его установки может быть шток или корпус гидроцилиндра. Один из выходов электронного блока управления 7 соединен с выходом задатчика 8 управляющего сигнала. В зависимости от значения и области применения электрогидравлического привода другие входы электронного блока 7 могут быть соединены через устройства обратной связи с датчиками контролируемых параметров (на чертеже устройства обратной связи и датчики контролируемых параметров не показаны). Электронный блок управления 7 предназначен для формирования (на основании поступающих на его входы сигналов от задатчика 8 и устройств обратной связи) усиленных электрических сигналов для управления электрогидравлическими усилителями мощности 5 и 6. Электрогидравлический привод работает следующим образом. При поступлении на соответствующий вход электронного блока 7 управляющего сигнала с выхода задатчика 8 на выходах блока 7, к которым подключены обмотки управления электромеханических преобразователей электрогидравлических усилителей мощности 5 и 6 (на чертеже электромеханические преобразователи не показаны), формируются усиленные электрические сигналы, которые отличаются в (А2/А3)R раз, где А2, А3 эффективные площади поршня дифференциального гидроцилиндра 1 соответственно со стороны его рабочих полостей 2 и 3. На нарушая общности рассуждений, для определенности положили, что в рассматриваемом случае рабочая полость 2 дифференциального гидроцилиндра 1 посредством усилителя 5 сообщается с источником питания постоянного давления 4, то есть является напорной, а полость 9 гидроцилиндра 1 посредством усилителя 6 сообщается со сливом, то есть является сливной. При этом A2 Aнп, A3 Aсп u и поршень гидроцилиндра 1 перемещается относительно его корпуса в сторону сливной полости. Поскольку проводимости рабочих окон, открываемых дросселирующими золотниками выходных каскадов усиления усилителей 5 и 6 (на чертеже дросселирующие золотники не показаны), пропорциональны величинам управляющих электрических сигналов, поступающих на обмотки управления электромеханических преобразователей усилителей, то проводимость Gнп рабочего окна, через которое напорная полость гидроцилиндра 1 сообщается с источником питания 4, в (Aнп/Aсп)R раз отличается от проводимости Gсп рабочего окна, через которое сливная полость гидроцилиндра 1 сообщается со сливом, то есть Gнп (Aнп/Aсп)RGмп (3) При квадратичном законе сопротивления, который в подавляющем большинстве случаев имеет место при течении жидкости через рабочее окно, открываемое дросселирующим золотником:
Aнп, A3 Aсп u и поршень гидроцилиндра 1 перемещается относительно его корпуса в сторону сливной полости. Поскольку проводимости рабочих окон, открываемых дросселирующими золотниками выходных каскадов усиления усилителей 5 и 6 (на чертеже дросселирующие золотники не показаны), пропорциональны величинам управляющих электрических сигналов, поступающих на обмотки управления электромеханических преобразователей усилителей, то проводимость Gнп рабочего окна, через которое напорная полость гидроцилиндра 1 сообщается с источником питания 4, в (Aнп/Aсп)R раз отличается от проводимости Gсп рабочего окна, через которое сливная полость гидроцилиндра 1 сообщается со сливом, то есть Gнп (Aнп/Aсп)RGмп (3) При квадратичном законе сопротивления, который в подавляющем большинстве случаев имеет место при течении жидкости через рабочее окно, открываемое дросселирующим золотником:
 где Qнп,
где Qнп,  Pнп соответственно расход рабочей жидкости и потери давления на рабочем окне с проводимостью Gнп; Qсп, Pсп соответственно расход рабочей жидкости и потери давления на рабочем окне с проводимостью Gсп. При пренебрежении утечками и перетечками рабочей жидкостью, а также сжимаемостью рабочей жидкости и податливостью стенок каналов, в которых она заключена: Qсп=AспQнп/Aнп (6) При пренебрежении потерями давления на остальных участках привода по сравнению с потерями давления Pнп и Pсп на рабочих окнах, открываемых дросселирующими золотниками электрогидравлических усилителей мощности, текущие значения давления Pнп и Рсп соответственно с напорной и сливной рабочих полостях гидроцилиндра 1 могут быть представлены следующим образом: Pнп=Pп-Pнп (7) Pсл=Pсл+Pсп (8) Сила трения в подвижных парах гидроцилиндра может быть представлена в виде суммы составляющих: постоянной и переменной, равной fнпPнп+fспPсп (fнп; fсп<A)Тогда уравнение сил, действующих на выходное звено гидроцилиндра 1, имеет вид:(Aнп-fнп)Pнп=(Aсп+fсп)Pсп++R (9)где R усилие на выходном звене гидроцилиндра. На основании выражений (3)-(9) получаем соотношения:
Pнп соответственно расход рабочей жидкости и потери давления на рабочем окне с проводимостью Gнп; Qсп, Pсп соответственно расход рабочей жидкости и потери давления на рабочем окне с проводимостью Gсп. При пренебрежении утечками и перетечками рабочей жидкостью, а также сжимаемостью рабочей жидкости и податливостью стенок каналов, в которых она заключена: Qсп=AспQнп/Aнп (6) При пренебрежении потерями давления на остальных участках привода по сравнению с потерями давления Pнп и Pсп на рабочих окнах, открываемых дросселирующими золотниками электрогидравлических усилителей мощности, текущие значения давления Pнп и Рсп соответственно с напорной и сливной рабочих полостях гидроцилиндра 1 могут быть представлены следующим образом: Pнп=Pп-Pнп (7) Pсл=Pсл+Pсп (8) Сила трения в подвижных парах гидроцилиндра может быть представлена в виде суммы составляющих: постоянной и переменной, равной fнпPнп+fспPсп (fнп; fсп<A)Тогда уравнение сил, действующих на выходное звено гидроцилиндра 1, имеет вид:(Aнп-fнп)Pнп=(Aсп+fсп)Pсп++R (9)где R усилие на выходном звене гидроцилиндра. На основании выражений (3)-(9) получаем соотношения:
 Для того, чтобы при выбранном исходя из условия обеспечения требуемого закона движения объекта управления, значении Pп давления питания привода при работе последнего с попутной нагрузкой на выходном звене Rпоп дифференциального гидроцилиндра давление в напорной полости гидроцилиндра не уменьшалось ниже величины Pдопmin, а сливной полости гидроцилиндра не повышалась сверх величины Pдопmax, согласно выражениям (10) и (11) должны выполняться неравенства:
Для того, чтобы при выбранном исходя из условия обеспечения требуемого закона движения объекта управления, значении Pп давления питания привода при работе последнего с попутной нагрузкой на выходном звене Rпоп дифференциального гидроцилиндра давление в напорной полости гидроцилиндра не уменьшалось ниже величины Pдопmin, а сливной полости гидроцилиндра не повышалась сверх величины Pдопmax, согласно выражениям (10) и (11) должны выполняться неравенства:
 Но поскольку неравенства (12) и (13) полностью совпадают с неравенствами (1) и (2), на основании которых для обоих возможных направлений движения выходного звена дифференциального гидроцилиндра 1 приводился выбор значения показателя степени R то для рассматриваемого электрогидравлического привода они заведомо выполняются. Отметим, что для случая: =0, fсп=fнп=0, Pcл=Pдопmin=0 Pдорmax=Pп и Rпопmax=AспPп неравенства (1) и (2) имеют единственное решение: R 1. В известных гидроприводах с дроссельным управлением проводимости рабочих окон, через которые жидкость движения от источника питания постоянного давления в напорную полость гидроцилиндра и из сливной полости гидроцилиндра на слив, практически равны, что соответствует значению R 0. При известном значении показателя степени R неравенства (12) и (13) позволяют определить давление питания гидропривода P*, необходимое для того, чтобы при работе привода с попутной нагрузкой на выходном звене дифференциального гидроцилиндра давление в напорной полости гидроцилиндра не уменьшалось ниже допустимой величины Pдоп, а в сливной полости гидроцилиндра не повышалось сверх допустимой величины Pдопmax. Для случая: R 0, =0,, fнп=fсп=0, Pсл=Pдопmin 0 Pдопmax=P* и Rпоп= AспPп из условия выполнения сформулированных выше требований получаем, что давление питания гидропривода P* должно быть не меньше большего из значений(Aнп/Aсп)2Pп и [(Aнп/Aсп)3-Aнп/Aсп+1)-1Pпвычисленных для обоих возможных направлений движения выходного звена гидроцилиндра. При отношении большей из эффективных площадей поршня дифференциального гидроцилиндра к меньшей, равном, например, 1,25, имеем P*
Но поскольку неравенства (12) и (13) полностью совпадают с неравенствами (1) и (2), на основании которых для обоих возможных направлений движения выходного звена дифференциального гидроцилиндра 1 приводился выбор значения показателя степени R то для рассматриваемого электрогидравлического привода они заведомо выполняются. Отметим, что для случая: =0, fсп=fнп=0, Pcл=Pдопmin=0 Pдорmax=Pп и Rпопmax=AспPп неравенства (1) и (2) имеют единственное решение: R 1. В известных гидроприводах с дроссельным управлением проводимости рабочих окон, через которые жидкость движения от источника питания постоянного давления в напорную полость гидроцилиндра и из сливной полости гидроцилиндра на слив, практически равны, что соответствует значению R 0. При известном значении показателя степени R неравенства (12) и (13) позволяют определить давление питания гидропривода P*, необходимое для того, чтобы при работе привода с попутной нагрузкой на выходном звене дифференциального гидроцилиндра давление в напорной полости гидроцилиндра не уменьшалось ниже допустимой величины Pдоп, а в сливной полости гидроцилиндра не повышалось сверх допустимой величины Pдопmax. Для случая: R 0, =0,, fнп=fсп=0, Pсл=Pдопmin 0 Pдопmax=P* и Rпоп= AспPп из условия выполнения сформулированных выше требований получаем, что давление питания гидропривода P* должно быть не меньше большего из значений(Aнп/Aсп)2Pп и [(Aнп/Aсп)3-Aнп/Aсп+1)-1Pпвычисленных для обоих возможных направлений движения выходного звена гидроцилиндра. При отношении большей из эффективных площадей поршня дифференциального гидроцилиндра к меньшей, равном, например, 1,25, имеем P* 1,5625 Pп, то есть в рассматриваемом случае при традиционном исполнении гидропривода величина его давления питания, необходимая из условия обеспечения бескавитационной работы привода, в 1,5625 раза превышает величину, необходимую исходя из условия обеспечения требуемого закона движения объекта управления. Из описания работы заявляемого электрогидравлического привода видно, что реализация предложенного технического решения, характеризующегося вышеизложенными отличительными признаками, обеспечивает уменьшение потребной величины давления питания привода от значения, необходимого исходя из условия обеспечения бескавитационной работы привода, до значения, необходимого исходя из условия обеспечения требуемого закона движения объекта управления, т. е. реализация предложенного технического решения обеспечивает бескавитационную работу гидропривода с дроссельным управлением с дифференциальным гидроцилиндром и при пониженном значении давления питания привода. Указанное уменьшение величины давления питания электрогидравлического привода влечет за собой снижение потерь энергии в процессе его эксплуатации и, соответственно, повышение экономичности привода. Помимо этого, снижение потерь энергии способствует улучшению теплового режима работы привода. Уменьшение величины давления питания гидропривода позволяет использовать в нем насос и проводящий двигатель с меньшими значениями установочной мощности, что ведет к снижению массы и габаритов привода. При изменении условий эксплуатации предлагаемого электрогидравлического привода требуемое в новых условиях соотношение проводимостей рабочих окон, через которые жидкость поступает в напорную полость дифференциального гидроцилиндра 1 и вытесняется из его сливной полости, легко устанавливается путем регулирования отношения электpических сигналов на выходах электронного блока управления 7, к которым подключены обмотки управления электрогидравлических усилителей мощности 5 и 6.
1,5625 Pп, то есть в рассматриваемом случае при традиционном исполнении гидропривода величина его давления питания, необходимая из условия обеспечения бескавитационной работы привода, в 1,5625 раза превышает величину, необходимую исходя из условия обеспечения требуемого закона движения объекта управления. Из описания работы заявляемого электрогидравлического привода видно, что реализация предложенного технического решения, характеризующегося вышеизложенными отличительными признаками, обеспечивает уменьшение потребной величины давления питания привода от значения, необходимого исходя из условия обеспечения бескавитационной работы привода, до значения, необходимого исходя из условия обеспечения требуемого закона движения объекта управления, т. е. реализация предложенного технического решения обеспечивает бескавитационную работу гидропривода с дроссельным управлением с дифференциальным гидроцилиндром и при пониженном значении давления питания привода. Указанное уменьшение величины давления питания электрогидравлического привода влечет за собой снижение потерь энергии в процессе его эксплуатации и, соответственно, повышение экономичности привода. Помимо этого, снижение потерь энергии способствует улучшению теплового режима работы привода. Уменьшение величины давления питания гидропривода позволяет использовать в нем насос и проводящий двигатель с меньшими значениями установочной мощности, что ведет к снижению массы и габаритов привода. При изменении условий эксплуатации предлагаемого электрогидравлического привода требуемое в новых условиях соотношение проводимостей рабочих окон, через которые жидкость поступает в напорную полость дифференциального гидроцилиндра 1 и вытесняется из его сливной полости, легко устанавливается путем регулирования отношения электpических сигналов на выходах электронного блока управления 7, к которым подключены обмотки управления электрогидравлических усилителей мощности 5 и 6.Формула изобретения
Электрогидравлический привод, содержащий источник питания постоянного давления, дифференциальный гидроцилиндр и электрогидравлический усилитель мощности, обмотка управления электромеханического преобразователя которого подключена к выходу электронного блока управления, один из входов которого соединен с выходом задатчика управляющего сигнала, отличающийся тем, что каждая из рабочих полостей дифференциального гидроцилиндра соединена с источником питания постоянного давления и сливом через индивидуальный электрогидравлический усилитель мощности, обмотки управления электромеханических преобразователей которых подключены к разным выходам электронного блока управления, причем отношение электрических сигналов на упомянутых выходах электронного блока управления равно отношению эффективных площадей поршня дифференциального гидроцилиндра со стороны его соответствующих рабочих полостей, возведенному в степень с показателем R, определяемым для обоих возможных направлений движения выходного звена гидроцилиндра из системы неравенств где Aн.п и Aс.п эффективные площади поршня дифференциального гидроцилиндра соответственно со стороны его напорной и сливной полостей;fн.п и fc.п коэффициенты пропорциональности переменных составляющих силы трения в подвижных парах гидроцилиндра значениям давления рабочей жидкости соответственно в напорной и сливной полостях гидроцилиндра; постоянная составляющая силы трения в подвижных парах гидроцилиндра;Pсл давление слива;Pп давление рабочей жидкости, создаваемое источником питания постоянного давления;Rпоп.max максимальное возможное значение попутной нагрузки на выходном звене гидроцилиндра;Pдоп.min и Pдоп.max соответственно минимальное и максимальное допустимые значения давления в рабочих полостях гидроцилиндра.
где Aн.п и Aс.п эффективные площади поршня дифференциального гидроцилиндра соответственно со стороны его напорной и сливной полостей;fн.п и fc.п коэффициенты пропорциональности переменных составляющих силы трения в подвижных парах гидроцилиндра значениям давления рабочей жидкости соответственно в напорной и сливной полостях гидроцилиндра; постоянная составляющая силы трения в подвижных парах гидроцилиндра;Pсл давление слива;Pп давление рабочей жидкости, создаваемое источником питания постоянного давления;Rпоп.max максимальное возможное значение попутной нагрузки на выходном звене гидроцилиндра;Pдоп.min и Pдоп.max соответственно минимальное и максимальное допустимые значения давления в рабочих полостях гидроцилиндра.РИСУНКИ
Рисунок 1www.findpatent.ru
Электрогидравлический привод | Банк патентов
Электрогидравлический привод предназначен для высокоточных электрогидравлических систем дистанционного управления. В объемном электрогидравлическом приводе параллельно каждому из двух подпиточных клапанов установлен дополнительный подпиточный клапан, по сравнению с имеющимся настроенный на меньшее давление срабатывания и имеющий большую крутизну статической характеристики, которая определяется по формуле
,
где pср.1 - давление срабатывания первого и второго подпиточных клапанов; pср.2 - давление срабатывания третьего и четвертого подпиточных клапанов; Qут - максимальный расход утечек из магистралей в режиме отработки управляющих воздействий, например гармонических, с заданной точностью. Технический результат - уменьшение зоны нечувствительности электрогидравлического привода и связанных с ней динамических качеств следящих электрогидравлических приводов. 3 ил.
Изобретение относится к области машиностроения и может быть использовано в высокоточных дистанционно управляемых электрогидравлических приводах.
Известен регулируемый гидропривод (Д.Н. Попов. Динамика и регулирование гидро- и пневмосистем. М., «Машиностроение», 1977, стр.330-332 [1]). Регулируемый насос магистралями соединен с гидромотором, имеющим постоянный рабочий объем. Подача насоса регулируется изменением угла наклона блока цилиндров с помощью механизма управления. Вал гидромотора кинематически связан с нагрузкой. Для восполнения утечек рабочей жидкости в замкнутом объеме «насос-гидромотор» служит вспомогательный насос.
Давление в напорной гидролинии вспомогательного насоса поддерживается постоянным с помощью предохранительного клапана. Напорная гидролиния вспомогательного насоса через фильтр и два подпиточных клапана подключена к магистралям гидропривода, соединяющим регулируемый насос и гидромотор. Подпиточные клапаны позволяют поддерживать в магистралях давление подпитки, достаточное для обеспечения бескавитационной работы гидропривода при различной (в зависимости от режима работы привода) величине компенсируемых утечек рабочей жидкости.
В качестве механизма управления регулируемого насоса могут быть использованы механические, электрические и электрогидравлические устройства.
Известен также электрогидравлический привод (ЭГП) (В.Н. Прокофьев. Динамика гидропривода. М, «Машиностроение», 1972, стр.15-18 [2]), обладающий более высокой чувствительностью к управляющему сигналу за счет использования в качестве механизма управления регулируемого насоса электрогидравлического устройства. Регулирование подачи при этом происходит за счет изменения величины электрического управляющего сигнала, подаваемого на вход механизма управления. Компенсация утечек из силовой части ЭГП осуществляется посредством вспомогательного насоса, к напорной гидролинии которого подключен предохранительный клапан, поддерживающий в ней постоянное давление, и через два подпиточных клапана, входы каждого из которых соединены с напорной гидролинией вспомогательного насоса, а их выходы - с соответствующими магистралями ЭГП.
Для обеспечения необходимого уровня давления подпитки во всех режимах работы ЭГП выбор параметров подпиточных клапанов проводится из условия обеспечения наименьшей интенсивности нарастания крутизны их статических характеристик, близкой к нулевому значению (т.е. отношение изменения давления к изменению расхода dp/dQ≈0) (фиг.1).
Наиболее близким к заявляемому электрогидравлическому приводу является ЭГП изделия СП190Э АЮИЖ 461324.001-01 ТО (ФГУП «ВНИИ «Сигнал», г.Ковров, 2002), выбранный за прототип. Данный следящий ЭГП дистанционного управления состоит из регулируемого насоса с электрогидравлическим механизмом управления, соединенного магистралями с гидромотором, вал которого кинематически связан с нагрузкой. Подпитка магистралей осуществляется вспомогательным насосом, напорная гидролиния которого соединена в входами первого и второго подпиточных клапанов, выходы которых соединены с соответствующими магистралями, соединяющими регулируемый насос и гидромотор. Постоянное давление (2+0,1 МПа) в напорной гидролинии вспомогательного насоса поддерживается предохранительным клапаном. Крутизна статической характеристики каждого из подпиточных клапанов БК2.505.295-07, выпускаемых ОАО «КЭМЗ» г.Ковров, составляет
, а давление срабатывания - 1,1 МПа.
Во время работы ЭГП вхолостую (при нулевом значении управляющего сигнала на входе механизма управления регулируемого насоса) каждый из двух подпиточных клапанов открыт для восполнения естественных утечек рабочей жидкости из магистралей ЭГП посредством подачи рабочей жидкости под давлением от вспомогательного насоса, входящего в его состав.
В процессе увеличения входного управляющего сигнала на электрогидравлическом механизме управления регулируемого насоса (управляющем входе ЭГП) в напорную магистраль ЭГП начинает поступать рабочая жидкость, нагнетаемая регулируемым насосом из всасывающей магистрали. Величина потока рабочей жидкости пропорциональна величине управляющего сигнала. При этом расход рабочей жидкости через подпиточный клапан, соединенный с напорной магистралью, уменьшается, т.к. часть необходимого расхода рабочей жидкости для ее подпитки обеспечивает сам регулируемый насос. Подпиточный клапан прикрывается. Расход через подпиточный клапан, связанный с всасывающей магистралью, соответственно возрастает, т.к. часть необходимого для подпитки расхода рабочей жидкости из нее регулируемый насос забирает. Подпиточный клапан открывается еще больше.
Однако из-за близости к нулевому значению крутизны статической характеристики подпиточных клапанов (dp/dQ≈0) давления в магистралях ЭГП в процессе нарастания входного управляющего сигнала от нулевого значения остаются практически неизменными и равны разности между давлением вспомогательного насоса и перепадом давления на соответствующем подпиточном клапане. Перепад давления на гидромоторе ЭГП и крутящий момент на его валу остаются нулевыми. Нулевой перепад давления на гидромоторе сохраняется до тех пор, пока подача рабочей жидкости от регулируемого насоса не вырастет до значения, соответствующего полному закрытию подпиточного клапана, соединенного с напорной магистралью ЭГП. Лишь после этого начинается рост перепада давления на гидромоторе. Таким образом, общим недостатком для ЭГП-прототипа и вышерассмотренных является наличие значительной зоны нечувствительности к управляющему сигналу, т.е. требуется значительное время для возникновения необходимого перепада давления на гидромоторе при увеличении входного управляющего сигнала от нуля до момента полного закрытия подпиточного клапана.
Изобретение направлено на уменьшение зоны нечувствительности ЭГП и, как следствие, на снижение ошибки ЭГП при отработке входного управляющего сигнала.
Для достижения указанного технического результата в ЭГП, содержащий гидравлически замкнутые между собой гидродвигатель, например гидромотор, и регулируемый насос с электрогидравлическим механизмом управления, электрический вход которого является управляющим входом электрогидравлического привода, вспомогательный насос, напорная гидролиния которого соединена с входами первого и второго подпиточных клапанов с давлением срабатывания рср.1, равным 0,8 МПа, и с крутизной статической характеристики, равной 0,0065 МПа·мин/л, выходы которых соединены с магистралями, соединяющими гидродвигатель и регулируемый насос, вход вспомогательного насоса и выход предохранительного клапана соединены с гидробаком, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса, введены третий и четвертый подпиточные клапаны, выходы которых соединены с магистралями, соединяющими гидродвигатель и регулируемый насос, а входы - с напорной гидролинией вспомогательного насоса, при этом каждый из вновь введенных подпиточных клапанов имеет минимально возможное давление срабатывания рср.2, например, 0,1+0,05 МПа, а крутизна статической характеристики каждого из них определяется по формуле
,
где Qут - максимальный расход утечек из магистралей в режиме отработки управляющих воздействий, например гармонических, с заданной точностью.
Заявляемый электрогидравлический привод иллюстрируется чертежами, представленными на фиг.1-3.
На фиг.1 показаны графики статической характеристики совокупности подпиточных клапанов и зависимость давления подпитки от расхода, где а - статическая характеристика вновь введенного клапана; б - статическая характеристика имеющегося клапана; в - суммарная статическая характеристика совокупности имеющегося и вновь введенного подпиточных клапанов; А - точка перелома; рс.х. - давление статической характеристики; рпод - давление подпитки; Q - расход через клапаны.
На фиг.2 приведена принципиальная гидравлическая схема заявляемого электрогидравлического привода.
На фиг.3 - осциллограммы экспериментальных исследований электрогидравлического привода, где г - кривая частоты вращения вала гидромотора при штатном исполнении ЭГП; д - кривая частоты вращения при использовании в ЭГП вновь введенных подпиточных клапанов; е - зона нечувствительности.
Электрогидравлический привод (фиг.2) содержит регулируемый насос 1 с электрогидравлическим механизмом управления 2 и связанный с ним магистралями 3 и 4 гидромотор 5. Вспомогательный насос 6 электрогидравлического привода своей напорной гидролинией 7 подключен к первому 8 и второму 9 подпиточным клапанам, а также к третьему 10 и четвертому 11 подпиточным клапанам. Выходы подпиточных клапанов первого 8 и третьего 10 соединены с магистралью 3, а выходы второго 9 и четвертого 11 подпиточных клапанов - с магистралью 4. К напорной гидролинии 7 подключен также предохранительный клапан 12 и линия 13 гидропитания электрогидравлического механизма управления 2. Выход предохранительного клапана 12 и вход вспомогательного насоса 6 связаны с гидробаком 14.
При работе насосов 1 и 6 от приводного двигателя (на фиг.2 не показан) вспомогательный насос 6 подает рабочую жидкость по напорной гидролинии 7 к предохранительному клапану 12, поддерживающему в ней постоянное давление, по линии 13 - к электрогидравлическому механизму управления 2 и к входам первого 8, второго 9, третьего 10 и четвертого 11 подпиточных клапанов для восполнения утечек рабочей жидкости из магистралей 3 и 4. При отсутствии на электрогидравлическом механизме управления 2 регулируемого насоса 1 управляющего электрического сигнала насос 1 подачу рабочей жидкости не производит, и вал гидромотора 5 неподвижен. При этом восполнение утечек из магистралей 3 и 4 (подпитка) из напорной гидролинии 7 вспомогательного насоса 6 происходит через вновь введенные третий 10 и четвертый 11 подпиточные клапаны соответственно. Поддерживаемое в магистралях 3 и 4 давление равно разности давления регулировки предохранительного клапана 12 и давления, соответствующего расходу через вновь введенные третий 10 и четвертый 11 подпиточные клапаны согласно их статическим характеристикам (фиг.1). При этом давление срабатывания каждого из вновь введенных третьего 10 и четвертого 11 подпиточных клапанов - минимально возможное и определяемое возможностью обеспечения их герметичности, например рср.1=0,1+0,05 МПа.
При подаче на электрогидравлический механизм управления 2 регулируемого насоса 1 электрического управляющего сигнала (Uyпp. на входе ЭГП) поршни регулируемого насоса 1 начинают совершать возвратно-поступательные движения, нагнетая рабочую жидкость в одну из магистралей, например, 3 и всасывая ее из другой 4. Сразу после отклонения входного управляющего сигнала от нулевого значения по мере возрастания подачи рабочей жидкости регулируемым насосом 1 расход для подпитки магистрали 3 через вновь введенный третий 10 подпиточный клапан уменьшается, а через четвертый 11 подпиточный клапан для подпитки магистрали 4 - увеличивается.
В связи с уменьшением расхода через третий 10 подпиточный клапан и увеличением расхода через четвертый 11 подпиточный клапан перепад давления на них соответственно уменьшается и увеличивается пропорционально крутизне статических характеристик этих клапанов, определяемой для каждого клапана по формуле
,
где Qут - максимальный расход утечек из магистралей в режиме отработки управляющих воздействий, например гармонических, с заданной точностью.
При этом давление подпитки в магистрали 3 увеличивается, а в магистрали 4 - уменьшается, что вызывает появление перепада давления между магистралями 3 и 4. Появление крутящего момента на валу гидромотора 5 наблюдается сразу после отклонения входного управляющего сигнала от нулевого значения, что способствует существенному снижению зоны нечувствительности по сравнению с прототипом.
Вал гидромотора начинает вращение с частотой, соответствующей величине управляющего электрического сигнала на входе электрогидравлического механизма управления 2 регулируемого насоса 1.
При дальнейшем увеличении расхода через четвертый 11 подпиточный клапан и понижении давления подпитки в магистрали 4 в соответствии с расходной характеристикой подпиточного клапана 11 и при достижении точки перелома 4 (фиг.1) в работу вступает второй 9 подпиточный клапан с давлением срабатывания рср.1, равным 0,8 МПа, и крутизной статической характеристики, равной 0,0065 МПа·мин/л, что происходит, например, при отработке ступенчатого воздействия в момент его появления или при существенных перегрузках привода. При этом работа ЭГП соответствует работе прототипа.
В ФГУП «ВНИИ «Сигнал» были проведены сравнительные испытания образцов электрогидравлических приводов в штатном исполнении (изделия «Панцирь-C1», «СП-190») и экспериментальных образцов, в которых параллельно со штатными подпиточными клапанами были установлены вновь введенные подпиточные клапаны, настроенные на меньшее давление срабатывания и с повышенной крутизной статической характеристики. При давлении настройки предохранительного клапана напорной гидролинии вспомогательного насоса (20+1) кгс/см2 давление срабатывания имеющегося подпиточного клапана составляло (8+1) кгс/см2 при крутизне статической характеристики
, а давление срабатывания вновь введенного подпиточного клапана составляло 1 кгс/см2 при крутизне статической характеристики
. Осциллограммы результатов испытаний показаны на фиг.3. Зона нечувствительности у экспериментального электрогидравлического привода уменьшена на 25-30% по сравнению со штатным. При этом снижение величины ошибки приводов наведения составило 30%, улучшилась плавность отработки управляющих воздействий.
Формула изобретения
Электрогидравлический привод, содержащий гидравлически замкнутые между собой гидродвигатель, например гидромотор, и регулируемый насос с электрогидравлическим механизмом управления, электрический вход которого является управляющим входом электрогидравлического привода, вспомогательный насос, напорная гидролиния которого соединена с входами первого и второго подпиточных клапанов с давлением срабатывания рср.1, равным 0,8 МПа, и с крутизной статической характеристики, равной 0,0065 МПа·мин/л, выходы которых соединены с магистралями, соединяющими гидродвигатель и регулируемый насос, вход вспомогательного насоса и выход предохранительного клапана соединены с гидробаком, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса, отличающийся тем, что в него введены третий и четвертый подпиточные клапаны, выходы которых соединены с магистралями, соединяющими гидродвигатель и регулируемый насос, а входы - с напорной гидролинией вспомогательного насоса, при этом каждый из вновь введенных подпиточных клапанов имеет минимально возможное давление срабатывания рср.2, например, 0,1+0,05 МПа, а крутизна статической характеристики каждого из них определяется по формуле
,где Qут - максимальный расход утечек из магистралей в режиме отработки управляющих воздействий, например гармонических, с заданной точностью.
bankpatentov.ru
Электрогидравлический следящий привод - Большая Энциклопедия Нефти и Газа, статья, страница 2
Электрогидравлический следящий привод
Cтраница 2
Пример схемы электрогидравлического следящего привода с устройствами, осуществляющими дополнительную обратную связь по скорости выходного звена, показан на рис. 13.17. В приводе, кроме всех основных элементов, имеются два датчика дополнительной обратной связи. Клапаны пере-крывают каналы, сообщающие золотниковый распределитель со сливной линией. [16]
Важнейшим элементом любого электрогидравлического следящего привода ( ЭГСП) является электрогидравлический усилитель. С другой стороны, электрогидравлический усилитель представляет собой прецизионное устройство, некоторые детали которого изготавливаются с микронными допусками, и как никакое другое электрогидромеханическое устройство, входящее в состав электрогидравлического следящего привода, подвержен влиянию внешних факторов, таких как изменение температуры окружающей среды, вибрация, загрязнение и изменение свойств рабочей жидкости, износ и технологический разброс параметров деталей электрогидравлического усилителя. [17]
В книге рассмотрены гидравлические и электрогидравлические следящие приводы с дроссельным и объемным управлением, приведены методики расчета их статических и динамических характеристик и приближенные методы решения задач устойчивости с учетом нелинейностей путем их гармонической линеаризации. Освещены вопросы построения схем и конструкций специальных гидравлических систем для работы при больших скоростях слежения, при скоростях, изменяющихся по заданной программе, и при синхронизации движений, а также явления, связанные со спецификой конструкций и действия электрогидравлических преобразователей. Даны рекомендации по расчету электромагнитных управляющих элементов. Приведены результаты исследования быстродействующих следящих приводов с гидроусилителем сопло-заслонка, в том числе при использовании в управлении принципа широт-но-импульсной модуляции, и изложена методика их расчета. [18]
Силовая часть рассматриваемого электрогидравлического следящего привода ( см. рис. 4.14) содержит приводящий электродвигатель ( ЯД), регулируемый насос ( Я), нерегулируемый гидродвигатель вращательного движения СГД) и силовую механическую передачу ( СЯ) в виде зубчатого редуктора. Насос и гидродвигатель соединены магистральными трубопроводами, обеспечивающими замкнутую циркуляцию жидкости. [19]
Сегодня при проектировании электрогидравлического следящего привода, как и при проектировании большинства подобных систем автоматического управления, часто пренебрегают влиянием внешних случайных факторов, которые могут привести к изменению характеристик системы управления в процессе ее эксплуатации. Не учитывают также статистику влияния неизбежного разброса параметров системы в пределах технологических допусков при серийном изготовлении системы ( изделия), ограничиваясь только требованием, чтобы эти параметры не выходили за пределы заданных технологических допусков. Однако вопросы о том, насколько технологический разброс параметров влияет на статистический разброс характеристик изделий в пределах серии, можно ли задать такие оптимальные настройки параметров, которые бы обеспечили наилучшую точность работы всей серии изделий с учетом допусков на их параметры, а также вопрос выбора оптимальных полей допусков на отдельные параметры системы остаются без должной проработки. [20]
В рассматриваемой схеме электрогидравлического следящего привода ( см. рис. 4.14) применены сельсины и зубчатые передачи. [21]
Электрогидравлические следящие системы ( электрогидравлический следящий привод) широко применяют в машиностроении как эффективное средство автоматизации. В станкостроении и роботостроении электрогидравлические следящие системы ( ЭГСС) составляют основу большинства систем с числовым программным управлением. Применение ЭГСС в системах управления самолетами, а также колесными и гусеничными транспортными машинами позволяет обеспечить достаточно простое и легкое управление при высоком быстродействии. [22]
На рис. 6.33 показан электрогидравлический следящий привод, в состав которого входит электрический датчик, электрогидравлическое промежуточное устройство и гидравлический исполнительный двигатель. В контакте с копиром 13 находится щуп 14 электрического датчика, в данном случае трехпозиционного с вибрирующим контактом. [24]
Основная трудность при создании электрогидравлических следящих приводов для ПР заключается в разработке и освоении промышленностью серийного производства электрогидравлических усилителей - устройств, преобразующих маломощный электрический сигнал управления в энергию потока рабочей жидкости большой мощности, поступающего в гидравлический исполнительный механизм. [25]
Использование струйных усилителей в электрогидравлических следящих приводах дает возможность непосредственно преобразовывать электрические сигналы в гидравлические без каких-либо промежуточных подвижных механических элементов. [27]
Выше были рассмотрены вопросы динамики электрогидравлических следящих приводов с дроссельным регулированием на основе линейных математических моделей, получаемых без учета существенных нелинейностей. Такой подход к исследованию и расчету приводов позволяет определить влияние постоянных времени и коэффициентов усиления элементов на устойчивость и качество переходных процессов, выбрать коэффициент усиления обратной связи в зависимости от требуемой точности управления каким-либо объектом и, наконец, провести сравнение динамических свойств приводов с различными корректирующими элементами и дополнительными обратными связями. Перечисленные задачи решаются методами анализа и методами синтеза по логарифмическим амплитудным частотным характеристикам разомкнутого контура привода. Результаты расчетов линейных моделей при малых отклонениях переменных величин лучше подтверждаются экспериментами при совершенной конструкции и технологии изготовления приводов и при меньших отличиях действительных характеристик нагрузок от принятых в исследуемой модели. [28]
Как формируется линейная математическая модель электрогидравлического следящего привода с машинным управлением. [29]
Подача электрода-инструмента на станке осуществляется высокочувствительным электрогидравлическим следящим приводом. Станок имеет электромагнитное закрепление сменных электродо-держателей с координированным положением электрода-инструмента относительно направлений перемещения стола. При изготовлении электрода совместно со сменной оправкой электродо-держателя обеспечивается высокая точность отображения обрабатываемой формы в изделии. Электромеханический следящий привод продольного перемещения каретки стола позволяет выполнять обработку горизонтальных пазов и отверстий сложной конфигурации. Станок комплектуется генератором ШГИ-16-880, позволяющим обрабатывать сквозные отверстия с точностью до 0 01 мм, фасонные поверхности и полости - до 0 03 мм. [30]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Электрогидравлический шаговый привод
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ШАГОВЫЙ ПРИВОД, содержащий корпус с установленными в нем гибким и жестким зубчатыми колесами, электрогидравлический генератор волн деформации, содержащий корпус, радиально установленные в нем с возможностью взаимодействия с гибким зубчатым колесом поршни и электрогидравлический дискретный преобразователь, выполненный в виде-управляемого от электро25 магнитов через два толкателя плоского четырехкромочного золотника, установленного на упругом подвесе с возможностью перекрытия четырех коммутационных окон, расположенных в корпусе генератора, каждое из которых сообщено с парой диаметрально расположенных порщней, и выходной вал, соединенный с гибким зубчатым колесом, отличающийся тем, что, с целью упрощения конструкции, повышения надежности и улучщения энергомассовых характеристик, коммутационные окна расположены со стороны внутреннего торца корпуса генератора попарно симметрично относительно оси выходного вала, упругий подвес выполнен в виде нескольких тонкостенных цилиндрических упругих колец и жестких секторных проставок , а плоский золотник выполнен в виде цилиндрической шайбы, установленной в (Л корпусе генератора эксцентрично оси выходного вала с возможностью перемещения в двух взаимно перпендикулярных плоскостях симметрии коммутационных окон. оо СХ) 01 ел
СОЮЗ СОВЕТСНИХ
СОЦИАЛИСТИЧЕСНИХ
РЕСПУБЛИН
4цв F 15 В 11/12; F 16 Н 1/00
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
«Ф»фа» ц,р»
ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ (21) 3663100/25-06 (22) 17.11.83 (46) 07.02.85. Бюл. № 5 (72) Э. В. Боровский, В. И. Лалабеков, Е. М. Пархоменко, Д. Н. Попов, Ю. П. Секретта и С. С. Уринцев (71) МВТУ им. Н. Э. Баумана (53) 621-225 (088.8) (56) 1. Авторское свидетельство СССР № 530961, кл. F 15 В 11/12, 1973.
2. Авторское свидетельство СССР № 949229, кл. F 15 В 11/12, 1980. (54) (57) ЭЛЕКТРОГИДРАВЛИЧЕСКИй
ШАГОВЫЛ ПРИВОД, содержащий корпус с установленными в нем гибким и жестким зубчатыми колесами, электрогидравлический генератор волн деформации, содержащий корпус, радиально установленные в нем с возможностью взаимодействия с гибким зубчатым колесом поршни и электрогидравлический дискретный преобразователь, выполненный в виде-управляемого от электро„,Я(.1 1138551 А магнитов через два толкателя плоского четырехкромочного золотника, установленного на упругом подвесе с возможностью перекрытия четырех коммутационных окон, расположенных в корпусе генератора, каждое из которых сообщено с парой диаметрально расположенных поршней, и выходной вал, соединенный с гибким зубчатым колесом, отличающийся тем, что, с целью упрощения конструкции, повышения надежности и улучшения энергомассовых характеристик, коммутационные окна расположены со стороны внутреннего торца корпуса генератора попарно симметрично относительно оси выходного вала, упругий подвес выполнен в виде нескольких тонкостенных цилиндрических упругих колец и жестких секторных проставок, а плоский золотник выполнен в виде цилиндрической шайбы, установленной в корпусе генератора эксцентрично оси выходного вала с возможностью перемещения в двух взаимно перпендикулярных плоскостях симметрии коммутационных окон.
1 138551
Изобретение относится к средствам гидропневмоавтоматики, в частности к приводам систем автоматического управления, и может быть использовано в выходных каскадах цифровых систем управления в роботах, автоматических станочных линиях ит. д.
Известен дискретный исполнительный механизм, содержащий корпус с установленными в нем гибким и жестким зубчатыми колесами, электрогидравлический генератор волн деформации, электрогидравлический дискретный преобразователь, выходной вал, связанный с гибким колесом (1) .
Однако известный механизм имеет недостаточно высокую надежность, обусловленную сложностью конструкции электрогидравлического генератора волн деформации.
Известен также электрогидравлический шаговый привод, содержащий корпус с установленными в нем гибким и жестким зубчатыми колесами, электрогидравлический генератор волн деформации, содержащий корпус, радиально установленные в нем с возможностью взаимодействия с гибким зубчатым колесом поршни и электрогидравлический дискретный преобразователь, выполненный в виде управляемого от электромагнитов через два толкателя плоского четырехкромочного золотника установленного на упругом подвесе с возможностью перекрытия четырех коммутационных окон, расположенных в корпусе генератора, каждое из которых сообщено с парой диаметрально расположенных поршней, и выходной вал, соединенный с гибким зубчатым колесом (2).
Недостатком известного шагового привода является то, что электрогидравлический преобразователь закреплен снаружи корпуса привода, что приводит к увеличению габаритов и массы привода. Наличие двух элементов в плоском золотнике и сложная пространственная система коммутационных окон и каналов усложняет технологию изготовления и уменьшает надежность привода.
Цель изобретения — упрощение конструкции, повышение надежности и улучшение энергомассовых характеристик привода.
Поставленная цель достигается тем, что в электрогидравлическом шаговом приводе, содержащем корпус с установленными в нем гибким и жестким зубчатыми копесами, электрогидравлический генератор волн деформации, содержащий корпус, радиально установленные в нем с возможностью взаимодействия с гибким зубчатым колесом поршни и электрогидравлический дискретный преобразователь, выполненный в виде управляемого от электромагнитов через два толкателя плоского четырехкромочного золотника, установленного на упругом подвесе с возможностью перекрытия четырех коммутационных окон, расположенных в корпусе ,.генератора, каждое из которых сообщено с парой диаметрально расположенных поршней, и выходной вал, соединенный с гибким зубчатым колесом, коммутационные окна раеположены со стороны внутреннего торца корпуса генератора попарно симметрично относительно оси выходного вала, упругий подвес выполнен в виде нескольких тонкостенных цилиндрических упругих колец и жестких секторных проставок, а плоский золотник выполнен в виде цилиндрической шайбы, установленной в корпусе генератора эксцентрично оси выходного вала с возможностью перемещения в двух взаимно перпендикулярных плоскостях симметрии коммутационных окон.
На фиг. 1 представлен электрогидравлический шаговый привод, общий вид; на фиг. 2 — разрез А-А на фиг. 1; на фиг. 3— разрез Б-Б на фиг. 1.
Электрогидравлический шаговый привод содержит корпус 1 с установленными в нем гибким и жестким зубчатыми колесами 2 и 3, электрогидравлический генератор волн деформации, содержащий корпус 4. Гибкое зубчатое колесо 3 жестко связано с выходным валом 5, установленным в подшипниках 6 и 7. В корпусе 4 радиально расположены с возможностью взаимодействия с гибким колесом 2 поршни 8. Пружины 9, установленные в рабочих полостях 10, обеспечивают постоянный контакт поршней 8, с гибким колесом 2. На внутреннем торце 11 корпуса 4 выполнены окно 12 питания, окно 13 слива и четыре коммутационных окна 14, а последние расположены попарно
35 симметрично относительно оси 15 выходного вала 5. Каждое окно 14 сообщено с парой рабочих полостей 10 диаметрально расположенных поршней 8 каналом 16. Кроме того, электрогидравлический генератор волн деформации содержит гидравлический дискретный преобразователь, содержащий управляемый от двух электромагнитов 17 через два толкателя 18 плоский четырехкромочный золотник, выполненный в виде цилиндрической шайбы 19, установленной в корпусе 4
45 эксцентрично оси 15 выходного вала 5 с возможностью перемещения в двух взаимно. перпендикулярных плоскостях 20 и 21 (фиг. 2) симметрии коммутационных окон 14.
Шайба 19 установлена на упругом подвесе, выполненном в виде нескольких тонкостенных цилиндрических упругих колец 22 и жестких секторных проставок 23, соединяющих, например, с помощью точечной сварки все упомянутые узлы упругого подвеса и золотника в единое целое. Обойма 24 обеспечивает
55 требуемый зазор между шайбой 19 и корпусом 4. Опора 25 шайбы 19 фиксируется на корпусе 4 с помощью штифта 26. Электромагниты 7 расположены на .опоре 27.
1138551
Якорь 28 каждого электромагнита 17 выполнен как одно целое с толкателем 18 и имеет пружинные шарниры 29.
Привод работает следующим образом.
В исходном положении цилиндрической шайбы 19, когда оба электромагнита 17 обесточены, под действием упругих сил шайба 19 перекрывает коммутационные окна 14 таким образом, что два из них сообщаются с окном 12 питания, а два другие — с окном 13 слива. Рабочая жидкость, поступающая через окно 12 питания и связанные с ним через шайбу 19 коммутационные окна 14, 1збеснечивает контакт по зубьям гибкого и жесткого колес 2 и 3. При подаче элект-. рического..управляющего импульса на один 15 из электромагнитов 17 его якорь 28 втягивается, что вызывает перемещение толкателя 18 и вместе с ним и шайбы 19 вдоль одной из взаимно перпендикулярных осей 20 или 21, переключая коммутационные окна 14.
В результате одна из пар рабочих полостей 10, заполненная рабочей жидкостью в исходном положении шайбы 19, сообщается с окном 13 слива, а расположенная под углом 90 по отношению к ней пара рабочих полостей 10, ранее сообщавшаяся с окном 13 25 слива, заполняется рабочей жидкостью.
При этом вершина волн деформации смещает на фазовый угол гибкое колесо 2 и вместе с ним и выходной вал 5. При подаче следующего электрического импульса на второй электромагнит 17 происходит сообщение пары рабочих полостей 10, расположенных под углом 90 по отношению к предыдущей паре с окном 12 питания, а предыдущая пара рабочих полостей 10 сообщается с окном 13 слива. В результате осуществляется второй шаг поворота гибкого колеса 2 и выходного вала 5. Если следует серия управляющих импульсов, цилиндрическая шайба 19 совершает плоское планетарное движение, подключая пары диаметрально противоположных рабочих полостей 10 к окну 12 питания, каждый раз сообщая пары полостей 10, расположенных под углом 90, с вновь включенными к окну 13 слива. Когда серия управляющих импульсов отработана, оба электромагнита 17 могут оставаться включенными или обесточенными в любом сочетании, определяющем новое фиксированное положение выходного вала 5 в конце процесса регулирования.
Технико-экономическая эффективность от использования предлагаемого привода, заключается в упрощении конструкции за счет выполнения плоского четырех кром очного золотника в виде шайбы с возможностью перемещения ее в двух взаимно перпендикулярных плоскостях симметрии коммутационных окон, а также в повышении надежности улучшении энергомассовых характеристик путем расположения электрогидравлического дискретного преобразователя на внутреннем торце корпуса генератора, что в целом расширяет область применения привода.
1138551
1g
Фиг.d
Составитель В. Коваль
Редактор Н. Яцола Техред И. Верес Корректор В. Синицкая
Заказ 10658/25 Тираж 648 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1! 3035, Москва, Ж вЂ” 35, Раушская наб., д. 4/5
Филиал ПГ1П




www.findpatent.ru





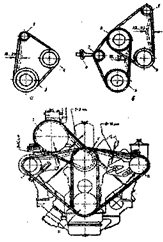
423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)