 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
портальный погрузчик. Портальный погрузчик
Портальный погрузчик
Изобретение относится к портальным погрузчикам. Портальный погрузчик содержит раму (10), имеющую практически параллельные противоположные стороны (12,14) и конфигурацию, позволяющую охватывать контейнер с двух сторон. Погрузчик имеет три ходовых колеса (24, 26) и (28), позволяющих располагать раму над контейнером. Ходовые колеса включают первое ходовое колесо (24), расположенное по меньшей мере приблизительно по центру на одной стороне (12) рамы, а также второе и третье ходовые колеса (26, 28), расположенные на противоположных краях другой стороны (14) рамы. Второе и третье колеса (26, 28) способны изменять направление путем поворота вокруг своих соответствующих практически вертикальных осей (40, 42). Достигается упрощение конструкции, высокая маневренность и устойчивость в работе погрузчика с грузом. 5 з.п. ф-лы, 7 ил.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается портальных погрузчиков.
УРОВЕНЬ ТЕХНИКИ
Портальный погрузчик представляет собой транспортное средство, применяемое, например, в портовых терминалах и на погрузочных площадках для складирования и перемещения интермодальных контейнеров. Портальные погрузчики поднимают и перемещают контейнеры, охватывая груз с двух сторон, и в зависимости от грузоподъемности способны складировать контейнеры штабелями высотой до четырех контейнеров. Они могут передвигаться с груженым контейнером на относительно низкой скорости (обычно до 30 км/час) и в целом не предназначены для езды по дорогам.
Традиционные портальные погрузчики имеют четыре ходовых колеса. Если погрузчик работает не на горизонтальной поверхности, то ему требуется система подвески, обеспечивающая постоянный контакт всех четырех колес с землей. Однако из соображений стоимости у большинства портальных погрузчиков система подвески отсутствует. При отсутствии системы подвески колесо может потерять контакт с землей, в результате чего теряется тяговое усилие, тормозное усилие и снижается устойчивость.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает портальный погрузчик, содержащий раму с расположенными напротив друг друга практически параллельными сторонами и с конфигурацией, которая позволяет охватывать контейнер для подъема и транспортировки, удерживая его между указанными противоположными сторонами, множество ходовых колес, позволяющих располагать раму над контейнером, а также средство для подъема контейнера внутри рамы, при этом ходовые колеса содержат первое ходовое колесо, расположенное по меньшей мере приблизительно по центру с одной стороны рамы, а также второе и третье ходовые колеса, расположенные на противоположных краях другой стороны рамы или рядом с ними, при этом второе и третье колеса способны поворачиваться вокруг соответствующих практически вертикальных осей.
В предпочтительном варианте воплощения изобретения первое колесо не способно поворачиваться, а его ось вращения проходит по ширине шасси.
Предпочтительно поворот погрузчика осуществляется синхронным поворотом второго и третьего колес вокруг их вертикальных осей практически на равные углы в противоположных направлениях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже в качестве примера описан один из вариантов воплощения настоящего изобретения со ссылками на сопутствующие чертежи, где:
На Фигуре 1 представлен вид в перспективе портального погрузчика по данному варианту воплощения изобретения.
На Фигурах 2(А) - 2(С) схематично показаны виды сверху погрузчика по Фиг.1, иллюстрирующие выполнение поворота в различных направлениях.
На Фигурах 3(А) и 3(В) показаны виды сбоку погрузчика, поднимающего грузы различной длины.
На Фигуре 4 схематично показан вид с торца погрузчика по Фигуре 1.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Как показано на чертежах, портальный погрузчик содержит стальную раму 10, которая на виде с торца по Фиг.4 в целом имеет вид перевернутой буквы "U". Рама 10 имеет расположенные напротив друг друга практически параллельные стороны 12, 14, соединяющиеся на вершине траверсами 16, открытое основание 18 и расположенные напротив друг друга открытые торцы 20. Такая конструкция образует подобие тоннеля, что позволяет раме охватывать контейнер 22 для того, чтобы поднимать его и транспортировать. На Фиг.1 (пунктирные линии) и на Фиг.4 контейнер 22 показан стоящим на земле, а на Фиг.1 (сплошные линии) и на Фиг.3 контейнер 22 показан в поднятом положении внутри рамы. Рама 10 смонтирована на трех ходовых колесах 24, 26 и 28, таким образом, чтобы она могла перемещаться над контейнером 22, стоящим на земле, как показано на Фиг.4. Конструкция и работа колес 24-28 будет подробно описана ниже.
Контейнер 22 крепится к раме четырьмя гибкими стальными элементами 30, например цепями или тросами. В процессе работы один конец каждого из элементов 30 прикреплен к соответствующему углу днища контейнера 22, а сам элемент 30 проходит через соответствующий шкив 32 на верху рамы 10, где его второй конец прикреплен к одному концу соответствующего гидравлического цилиндра 34. Путем втягивания цилиндров 34 контейнер 22 можно поднимать с земли для транспортировки (Фигуры 1 и 3), а путем выдвижения цилиндров контейнер можно опускать обратно на землю, как показано на Фигурах 1 и 4 (элементы 30 на Фиг.4 не показаны).
Поскольку гибкие элементы 30 могут отклоняться на угол, показанный пунктирными линиями на Фиг.3 (А), их можно прикреплять к контейнерам 22 различной длины, как показано на Фигурах 3 (А) и 3 (В), таким образом, погрузчик способен поднимать и транспортировать грузы различной длины. Кроме того, этот портальный погрузчик способен снимать контейнеры с транспортирующих машин и ставить их на эти машины или складировать контейнеры штабелями высотой по два или больше, при условии, что высота внутреннего зазора рамы 10 достаточна для подъема контейнера на требуемую высоту. Для осуществления транспортировки контейнер 22 можно поднять до самой верхушки рамы 10, где он будет плотно прижат снизу к траверсам 16. Это обеспечивает надежность и устойчивость крепления контейнера.
Работой портального погрузчика управляет оператор, который сидит в кабине 36, смонтированной снаружи по отношению к раме 10 между колесами 26, 28. Позади кабины 36 находится гидравлический силовой агрегат 38, который под управлением оператора прикладывает гидравлическое усилие к цилиндрам 34 по гидравлической цепи (не показано). Оператор из кабины 36 может поднимать и опускать контейнер 22 посредством втягивания и выдвигания цилиндров 34 известным способом. Контейнер 22 можно поднять достаточно высоко для того, чтобы оператору хорошо было видно пространство под контейнером, см. Фиг.3.
Ходовые колеса портального погрузчика содержат одно колесо 24, расположенное под стороной 12, по меньшей мере приблизительно по центру между противоположными открытыми торцами 20 рамы 10, а также два колеса 26, 28, которые расположены под стороной 14 на открытых торцах рамы или рядом с ними. Эти три колеса образуют приблизительно равнобедренный треугольник, вершиной которого является колесо 24, а основание вытянуто от колеса 26 до колеса 28. Колесо 24 зафиксировано, т.е. не может поворачиваться, а его ось вращения Х (Фигура 3) проходит по ширине рамы перпендикулярно сторонам 12, 14. Однако каждое из колес 26, 28 может изменять направление движения путем поворота вокруг соответствующих практически вертикальных осей 40 и 42.
Поворот колес 26, 28 синхронизирован таким образом, что оператор, поворачивая рулевое колесо 44 в кабине 36, вынуждает колеса 26, 28 поворачиваться вокруг их вертикальных осей 40, 42 практически на одинаковый угол в противоположных направлениях. Поворот управляемых колес 26, 28 вокруг их вертикальных осей осуществляется гидравлическими цилиндрами 46, 48, связанными с гидравлическим силовым агрегатом 38, а управление поворотом осуществляется рулевым колесом 44. Направление и величина угла поворота рулевого колеса 44 определяют, в каком направлении и на какой угол повернутся колеса 26,28 вокруг своих вертикальных осей.
Кроме гидравлических цепей, необходимых для работы подъемных цилиндров 34 и рулевых цилиндров 46 и 48, погрузчик также содержит гидравлическую цепь, подключенную к одному или более приводных гидродвигателей, связанных, соответственно, с одним или более колес 24-28, для того чтобы осуществлять движение погрузчика по земле под управлением оператора. Приводной гидродвигатель (гидродвигатели) и приводные гидравлические цепи здесь не показаны, однако квалифицированному специалисту хорошо известны способы их применения.
Как показано на Фиг.2, при движении прямо вперед (Фиг.2 (А)) все три колеса расположены параллельно сторонам 12, 14. Если при движении вперед оператор повернет рулевое колесо 44 по часовой стрелке, портальный погрузчик повернет по часовой стрелке (Фиг.2 (В)), при этом колеса 26, 28 повернутся на одинаковые углы в противоположных направлениях. Если при движении вперед оператор повернет рулевое колесо 44 против часовой стрелки, портальный погрузчик повернет против часовой стрелки (Фиг.2 (С)), при этом колеса 26, 28 опять повернутся на одинаковые углы в противоположных направлениях (но в этом случае направление поворота каждого колеса будет противоположным тому, что было при повороте погрузчика по часовой стрелке). При повороте на предельное значение, соответствующее положениям колес, показанным на Фигурах 2 (В) и 2 (С), погрузчик может поворачиваться вокруг своей оси.
В одной из модификаций представленного выше варианта воплощения изобретения одно или более из колес 24, 26 и 28 может содержать пару колес, расположенных вплотную друг к другу на одной оси, при этом такая колесная пара вращается и/или поворачивается как одна деталь.
В другой модификации кабину оператора можно убрать, а управление погрузчиком осуществлять дистанционно.
В представленном выше варианте воплощения изобретения ходовые колеса вращаются под воздействием приводных гидродвигателей (не показано) и поворачиваются под воздействием гидравлических цилиндров 46 и 48, а гибкими стальными подъемными элементами 30 управляют гидравлические цилиндры 34, при этом все указанные механизмы получают энергию от гидравлического силового агрегата 38, однако в альтернативном варианте любой их этих механизмов или все они могут работать от электрических двигателей, получающих питание от мощных аккумуляторных батарей, находящихся в блоке 38.
Три главных преимущества описанного выше трехколесного портального погрузчика состоят в том, что:
1. Не нужна система подвески. Все три колеса остаются в контакте с землей, независимо от формы рельефа.
2. Сохраняется тяговое и тормозное усилие. Все три колеса остаются в контакте с землей, независимо от формы рельефа, следовательно, ни у одного из колес не ослабевает тяговое или тормозное усилие.
3. Такой погрузчик является более маневренным. Погрузчик со своим грузом способен поворачиваться вокруг своей оси.
Настоящее изобретение не ограничивается описанными здесь вариантами его воплощения, которые можно модифицировать или варьировать, не выходя за пределы объема настоящего изобретения.
1. Портальный погрузчик, содержащий раму, имеющую практически параллельные противоположные стороны и конфигурацию, позволяющую охватывать контейнер для того, чтобы поднимать и транспортировать его, удерживая между указанными противоположными сторонами, множество ходовых колес, позволяющих располагать раму над контейнером, а также средства для подъема контейнера внутри рамы, при этом ходовые колеса включают первое ходовое колесо, расположенное в первом положении по меньшей мере приблизительно по центру на одной стороне рамы, а также второе и третье ходовые колеса, расположенные соответственно во втором и третьем положениях, находящихся на противоположных краях второй стороны рамы или возле них, при этом направлением движения второго и третьего колес можно управлять путем их поворота вокруг соответствующих практически вертикальных осей, и при этом опора погрузчика на поверхность земли осуществляется за счет его полного контакта с ней в указанных первом, втором и третьем положениях.
2. Портальный погрузчик по п.1, отличающийся тем, что первое колесо является неповорачиваемым, а его ось вращения проходит по ширине рамы.
3. Портальный погрузчик по п.1, отличающийся тем, что поворот второго и третьего колес вокруг их вертикальных осей для управления погрузчиком выполняется синхронно практически на одинаковый угол в противоположных направлениях.
4. Портальный погрузчик по п.1, отличающийся тем, что внутренний зазор рамы имеет достаточную высоту для того, чтобы складировать контейнеры штабелем высотой по меньшей мере в два контейнера.
5. Портальный погрузчик по п.1, отличающийся тем, что по меньшей мере одно из ходовых колес (первое, второе или третье) содержит пару колес, расположенных на одной оси вплотную друг к другу в указанных соответственно первом, втором или третьем положениях.
6. Портальный погрузчик по п.1, управление которым осуществляется дистанционно.
www.findpatent.ru
портальный погрузчик - патент РФ 2526019
Изобретение относится к портальным погрузчикам. Портальный погрузчик содержит раму (10), имеющую практически параллельные противоположные стороны (12,14) и конфигурацию, позволяющую охватывать контейнер с двух сторон. Погрузчик имеет три ходовых колеса (24, 26) и (28), позволяющих располагать раму над контейнером. Ходовые колеса включают первое ходовое колесо (24), расположенное по меньшей мере приблизительно по центру на одной стороне (12) рамы, а также второе и третье ходовые колеса (26, 28), расположенные на противоположных краях другой стороны (14) рамы. Второе и третье колеса (26, 28) способны изменять направление путем поворота вокруг своих соответствующих практически вертикальных осей (40, 42). Достигается упрощение конструкции, высокая маневренность и устойчивость в работе погрузчика с грузом. 5 з.п. ф-лы, 7 ил. 
Рисунки к патенту РФ 2526019
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается портальных погрузчиков.
УРОВЕНЬ ТЕХНИКИ
Портальный погрузчик представляет собой транспортное средство, применяемое, например, в портовых терминалах и на погрузочных площадках для складирования и перемещения интермодальных контейнеров. Портальные погрузчики поднимают и перемещают контейнеры, охватывая груз с двух сторон, и в зависимости от грузоподъемности способны складировать контейнеры штабелями высотой до четырех контейнеров. Они могут передвигаться с груженым контейнером на относительно низкой скорости (обычно до 30 км/час) и в целом не предназначены для езды по дорогам.
Традиционные портальные погрузчики имеют четыре ходовых колеса. Если погрузчик работает не на горизонтальной поверхности, то ему требуется система подвески, обеспечивающая постоянный контакт всех четырех колес с землей. Однако из соображений стоимости у большинства портальных погрузчиков система подвески отсутствует. При отсутствии системы подвески колесо может потерять контакт с землей, в результате чего теряется тяговое усилие, тормозное усилие и снижается устойчивость.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает портальный погрузчик, содержащий раму с расположенными напротив друг друга практически параллельными сторонами и с конфигурацией, которая позволяет охватывать контейнер для подъема и транспортировки, удерживая его между указанными противоположными сторонами, множество ходовых колес, позволяющих располагать раму над контейнером, а также средство для подъема контейнера внутри рамы, при этом ходовые колеса содержат первое ходовое колесо, расположенное по меньшей мере приблизительно по центру с одной стороны рамы, а также второе и третье ходовые колеса, расположенные на противоположных краях другой стороны рамы или рядом с ними, при этом второе и третье колеса способны поворачиваться вокруг соответствующих практически вертикальных осей.
В предпочтительном варианте воплощения изобретения первое колесо не способно поворачиваться, а его ось вращения проходит по ширине шасси.
Предпочтительно поворот погрузчика осуществляется синхронным поворотом второго и третьего колес вокруг их вертикальных осей практически на равные углы в противоположных направлениях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже в качестве примера описан один из вариантов воплощения настоящего изобретения со ссылками на сопутствующие чертежи, где:
На Фигуре 1 представлен вид в перспективе портального погрузчика по данному варианту воплощения изобретения.
На Фигурах 2(А) - 2(С) схематично показаны виды сверху погрузчика по Фиг.1, иллюстрирующие выполнение поворота в различных направлениях.
На Фигурах 3(А) и 3(В) показаны виды сбоку погрузчика, поднимающего грузы различной длины.
На Фигуре 4 схематично показан вид с торца погрузчика по Фигуре 1.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Как показано на чертежах, портальный погрузчик содержит стальную раму 10, которая на виде с торца по Фиг.4 в целом имеет вид перевернутой буквы "U". Рама 10 имеет расположенные напротив друг друга практически параллельные стороны 12, 14, соединяющиеся на вершине траверсами 16, открытое основание 18 и расположенные напротив друг друга открытые торцы 20. Такая конструкция образует подобие тоннеля, что позволяет раме охватывать контейнер 22 для того, чтобы поднимать его и транспортировать. На Фиг.1 (пунктирные линии) и на Фиг.4 контейнер 22 показан стоящим на земле, а на Фиг.1 (сплошные линии) и на Фиг.3 контейнер 22 показан в поднятом положении внутри рамы. Рама 10 смонтирована на трех ходовых колесах 24, 26 и 28, таким образом, чтобы она могла перемещаться над контейнером 22, стоящим на земле, как показано на Фиг.4. Конструкция и работа колес 24-28 будет подробно описана ниже.
Контейнер 22 крепится к раме четырьмя гибкими стальными элементами 30, например цепями или тросами. В процессе работы один конец каждого из элементов 30 прикреплен к соответствующему углу днища контейнера 22, а сам элемент 30 проходит через соответствующий шкив 32 на верху рамы 10, где его второй конец прикреплен к одному концу соответствующего гидравлического цилиндра 34. Путем втягивания цилиндров 34 контейнер 22 можно поднимать с земли для транспортировки (Фигуры 1 и 3), а путем выдвижения цилиндров контейнер можно опускать обратно на землю, как показано на Фигурах 1 и 4 (элементы 30 на Фиг.4 не показаны).
Поскольку гибкие элементы 30 могут отклоняться на угол, показанный пунктирными линиями на Фиг.3 (А), их можно прикреплять к контейнерам 22 различной длины, как показано на Фигурах 3 (А) и 3 (В), таким образом, погрузчик способен поднимать и транспортировать грузы различной длины. Кроме того, этот портальный погрузчик способен снимать контейнеры с транспортирующих машин и ставить их на эти машины или складировать контейнеры штабелями высотой по два или больше, при условии, что высота внутреннего зазора рамы 10 достаточна для подъема контейнера на требуемую высоту. Для осуществления транспортировки контейнер 22 можно поднять до самой верхушки рамы 10, где он будет плотно прижат снизу к траверсам 16. Это обеспечивает надежность и устойчивость крепления контейнера.
Работой портального погрузчика управляет оператор, который сидит в кабине 36, смонтированной снаружи по отношению к раме 10 между колесами 26, 28. Позади кабины 36 находится гидравлический силовой агрегат 38, который под управлением оператора прикладывает гидравлическое усилие к цилиндрам 34 по гидравлической цепи (не показано). Оператор из кабины 36 может поднимать и опускать контейнер 22 посредством втягивания и выдвигания цилиндров 34 известным способом. Контейнер 22 можно поднять достаточно высоко для того, чтобы оператору хорошо было видно пространство под контейнером, см. Фиг.3.
Ходовые колеса портального погрузчика содержат одно колесо 24, расположенное под стороной 12, по меньшей мере приблизительно по центру между противоположными открытыми торцами 20 рамы 10, а также два колеса 26, 28, которые расположены под стороной 14 на открытых торцах рамы или рядом с ними. Эти три колеса образуют приблизительно равнобедренный треугольник, вершиной которого является колесо 24, а основание вытянуто от колеса 26 до колеса 28. Колесо 24 зафиксировано, т.е. не может поворачиваться, а его ось вращения Х (Фигура 3) проходит по ширине рамы перпендикулярно сторонам 12, 14. Однако каждое из колес 26, 28 может изменять направление движения путем поворота вокруг соответствующих практически вертикальных осей 40 и 42.
Поворот колес 26, 28 синхронизирован таким образом, что оператор, поворачивая рулевое колесо 44 в кабине 36, вынуждает колеса 26, 28 поворачиваться вокруг их вертикальных осей 40, 42 практически на одинаковый угол в противоположных направлениях. Поворот управляемых колес 26, 28 вокруг их вертикальных осей осуществляется гидравлическими цилиндрами 46, 48, связанными с гидравлическим силовым агрегатом 38, а управление поворотом осуществляется рулевым колесом 44. Направление и величина угла поворота рулевого колеса 44 определяют, в каком направлении и на какой угол повернутся колеса 26,28 вокруг своих вертикальных осей.
Кроме гидравлических цепей, необходимых для работы подъемных цилиндров 34 и рулевых цилиндров 46 и 48, погрузчик также содержит гидравлическую цепь, подключенную к одному или более приводных гидродвигателей, связанных, соответственно, с одним или более колес 24-28, для того чтобы осуществлять движение погрузчика по земле под управлением оператора. Приводной гидродвигатель (гидродвигатели) и приводные гидравлические цепи здесь не показаны, однако квалифицированному специалисту хорошо известны способы их применения.
Как показано на Фиг.2, при движении прямо вперед (Фиг.2 (А)) все три колеса расположены параллельно сторонам 12, 14. Если при движении вперед оператор повернет рулевое колесо 44 по часовой стрелке, портальный погрузчик повернет по часовой стрелке (Фиг.2 (В)), при этом колеса 26, 28 повернутся на одинаковые углы в противоположных направлениях. Если при движении вперед оператор повернет рулевое колесо 44 против часовой стрелки, портальный погрузчик повернет против часовой стрелки (Фиг.2 (С)), при этом колеса 26, 28 опять повернутся на одинаковые углы в противоположных направлениях (но в этом случае направление поворота каждого колеса будет противоположным тому, что было при повороте погрузчика по часовой стрелке). При повороте на предельное значение, соответствующее положениям колес, показанным на Фигурах 2 (В) и 2 (С), погрузчик может поворачиваться вокруг своей оси.
В одной из модификаций представленного выше варианта воплощения изобретения одно или более из колес 24, 26 и 28 может содержать пару колес, расположенных вплотную друг к другу на одной оси, при этом такая колесная пара вращается и/или поворачивается как одна деталь.
В другой модификации кабину оператора можно убрать, а управление погрузчиком осуществлять дистанционно.
В представленном выше варианте воплощения изобретения ходовые колеса вращаются под воздействием приводных гидродвигателей (не показано) и поворачиваются под воздействием гидравлических цилиндров 46 и 48, а гибкими стальными подъемными элементами 30 управляют гидравлические цилиндры 34, при этом все указанные механизмы получают энергию от гидравлического силового агрегата 38, однако в альтернативном варианте любой их этих механизмов или все они могут работать от электрических двигателей, получающих питание от мощных аккумуляторных батарей, находящихся в блоке 38.
Три главных преимущества описанного выше трехколесного портального погрузчика состоят в том, что:
1. Не нужна система подвески. Все три колеса остаются в контакте с землей, независимо от формы рельефа.
2. Сохраняется тяговое и тормозное усилие. Все три колеса остаются в контакте с землей, независимо от формы рельефа, следовательно, ни у одного из колес не ослабевает тяговое или тормозное усилие.
3. Такой погрузчик является более маневренным. Погрузчик со своим грузом способен поворачиваться вокруг своей оси.
Настоящее изобретение не ограничивается описанными здесь вариантами его воплощения, которые можно модифицировать или варьировать, не выходя за пределы объема настоящего изобретения.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Портальный погрузчик, содержащий раму, имеющую практически параллельные противоположные стороны и конфигурацию, позволяющую охватывать контейнер для того, чтобы поднимать и транспортировать его, удерживая между указанными противоположными сторонами, множество ходовых колес, позволяющих располагать раму над контейнером, а также средства для подъема контейнера внутри рамы, при этом ходовые колеса включают первое ходовое колесо, расположенное в первом положении по меньшей мере приблизительно по центру на одной стороне рамы, а также второе и третье ходовые колеса, расположенные соответственно во втором и третьем положениях, находящихся на противоположных краях второй стороны рамы или возле них, при этом направлением движения второго и третьего колес можно управлять путем их поворота вокруг соответствующих практически вертикальных осей, и при этом опора погрузчика на поверхность земли осуществляется за счет его полного контакта с ней в указанных первом, втором и третьем положениях.
2. Портальный погрузчик по п.1, отличающийся тем, что первое колесо является неповорачиваемым, а его ось вращения проходит по ширине рамы.
3. Портальный погрузчик по п.1, отличающийся тем, что поворот второго и третьего колес вокруг их вертикальных осей для управления погрузчиком выполняется синхронно практически на одинаковый угол в противоположных направлениях.
4. Портальный погрузчик по п.1, отличающийся тем, что внутренний зазор рамы имеет достаточную высоту для того, чтобы складировать контейнеры штабелем высотой по меньшей мере в два контейнера.
5. Портальный погрузчик по п.1, отличающийся тем, что по меньшей мере одно из ходовых колес (первое, второе или третье) содержит пару колес, расположенных на одной оси вплотную друг к другу в указанных соответственно первом, втором или третьем положениях.
6. Портальный погрузчик по п.1, управление которым осуществляется дистанционно.
www.freepatent.ru
Портальный погрузчик
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК
ОПИСАНИЕ ИЗОБРЕТЕНИ
К А ВТОРСКОМ,Ф СВИДЕТЕЛЬСТВУ
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ (21) 3835893/27-11 (22) 02.01.85 (46) 30.04.86. Бюл. № 16 (71) Научно-исследовательский зональный институт садоводства Нечерноземной полосы (72) В. Н. Ожерельев, Н. В. Ожерельева и Т. М. Константинова (53) 621.869.4 (088.8) (56) Краткий автомобильный справочник.
НИИАТ, изд. Транспорт, 1979, с. 277. (54) (57) 1. ПОРТАЛЬНЫЙ ПОГРУЗЧИК, содержащий закрепленную на транспортном средстве с возможностью поворота вокруг горизонтальной оси П-образную раму, на которой смонтирован захват, отличающийся тем, что, с целью повышения производительности путем уменьшения непроизводительности затрат времени на захват груза и
ÄÄSUÄÄ 1227532 А1
m 4 В 60 P 1 60 В 60 P 1 00 В 66 F 9 06 маневрирование, верхняя поперечина П-образной рамы установлена в стойках на цилиндрических шарнирах, а захват выполнен вильчатым и связан с ее средней частью верTHKBJlbHblM валом.
2. Погрузчик по п. 1, отличающийся тем, что верхняя поперечина установлена внутри трубы, жестко прикрепленной одним концом к одной из стоек рамы, а на другом конце трубы жестко закреплен зубчатый венец, зацепленный с шестерней, которая установлена на вертикальном валу.
3. Г1огрузчик по пп. 1 и 2, отличающийся тем, что вилы захвата установлены с возможностью горизонтального перемещения приводом по поперечным опорным стержням, которые закреплены на указанном вертикальном валу.
1227532
Изобретение относится к подьемно-транспортному оборудованию и может быть использовано для выполнения погрузочноразгрузочных работ, преимущественно для тарно-штучных грузов, например контейне5 ров с сельскохозяйственной продукцией.
Цель изобретения — повышение производительности погрузчика путем умеHbllJEния непроизводительности затрат времени на захват груза и маневрирование.
На фиг. 1 изображен вильчатый захват портального погрузчика, вид сбоку; на фиг. 2 — разрез А — А на фиг. 1; на фиг. 3— узел 1 на фиг. 2; на фиг. 4 — схема работы портального погрузчика.
Портальный погруз IHK состоит из двух
15 закрепленных нижними концами на раме транспортного средства стоек 1 с возможностью поворота в местах крепления вокруг общей горизонтально установленной оси 2.
Стойки 1 соединены в верхней части поперечиной 3, образуя П-образную раму порталь- 20 ного погрузчика. Поперечина 3 установлена с возможностью поворота в отверстиях стоек 1 вокруг горизонтальной оси. В центральной части поперечины 3 выполнено перпендикулярно к ее оси сквозное отверстие, в котором на подшипниках 4 и 5 качения вертикально установлен вал 6. На последнем жестко закреплен корпус 7 захвата с опорными стержнями 8, на которых установлены вилы 9 с возможностью перемещения по ним в направлениях, указанных стрелками 10, посредством гидроцилиндра 11. На одной из стоек 1 жестко закреплена одним из своих концов труба 12, охватывающая поперечину 3. На втором конце трубы 12 жестко закреплен зубчатый венец 13, который находит
На одном из концов поперечины 3 в месте установки ее в отверстии стойки 1 выполнены лунки. Внутри стойки 1 на оси 15 смонтирован силовой цилиндр 16 с фиксатором 17.
На фиг. 4 дополнительно обозначены контейнеровоз 18,, соединенный с транспортным средством, поднимаемый контейнер 19 с грузом, толкатель 20 и привод 21 поворота стоек.
Предлагаемый портальный погрузчик работает следующим образом.
Агрегат в составе транспортного средства с портальным погрузчиком и контейнеровоза
18 въезжает в междурядье, по центру которого размещены контейнеры 19 с плодами.
Вилы 9 опускают до уровня почвы поворотом вокруг горизонтальной оси 2 стоек
1 приводом 21. Фиксатор 17 посредством силового цилиндра 16 стопорит поперечину 3.
Гидроцилиндром 11 перемещают вилы 9 по опорным стержням 8 до совпадения их с соответствующими отверстиями поддона контейнера !9. При движении транспортного средства вперед происходит захват контейнеа 19, стойки 1 поворачиваются приводом
21 вокруг горизонтальных осей 2 обеспечивая подъем контейнера 19. При этом поперечина 3 расстопоривается и может свободно поворачиваться в отверстиях стоек 1 вокруг горизонтальной оси. Поскольку шестерня 14 находится в зацеплении с неподвижным зубчатым венцом 13, происходит поворот вил 9 с контейнером 19 вместе с корпусом 7 захвата, опорными стержнями 8 и валом 6 вокруг вертикальной оси на 180 .
Контейнер 19 устанавливают на площадку контейнеровоза 18 и толкателем 20 передвигают по рольгангу контейнеровоза 18, освобождая вилы 9. При этом поперечина 3 находится в застопоренном состоянии. После освобождения вил 9 поперечина 3 расстопоривается и поворотом стоек 1 погрузчик приводится в исходное положение, при этом вилы 9 поворачиваются в обратную сторону на 180 и также приводятся в исходное положение.
1227532
17 (11иг. 4
Редактор М. Петрова
Заказ 1994/21
Составитель В. Феликсов
Техред И. Верес Корректор М. Максимишинец
Тираж 647 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий! 13035, Москва, Ж вЂ” 35, Раушская наб., д. 4/5
Филиал ППП «Патент», г. Ужгород, ул. Проектная, 4



www.findpatent.ru
Портальный погрузчик
(72) Авторы изобретения
И. Г. Беккер, И, В. Воскобойников, О.
В. С. Бубенцов н А. В. Бепюкнн (73) Заявитель
Специальное проектно-конструкторское (54) ПОРТАЛЬНЫЙ ПОГРУЗЧИК .
Изобретение относится к подъемнотранспортным средствам, в частности к. портальным погрузчикам.
Известен портальный погрузчнк, содер жащнй снабженную манипулятором площадку, установленную на двух парах стоек, 5 одна из которых шарнирно соединена c pa мой, опирающейся HB ведущие н ведомые колеса (Д.
Недостатком погрузчика является цемесская надежность работы из-за отсутст- О вня. постоянного контакта его вещлцих ко-. лес с грунтом. Это происходит потому, : что в нем стойки шарнирно соедяненные с рамой, располагаются с одного конца
1 t5 шасси, что приводиг в случае попадания одного нз колес в выбоину грунта к пе рекосу его портала, прн этом не достигается стабильность горизонтального поло жения площадки.
Gemü изобретения - повышение надежности путем обеспечения продольной н поперечной стабилизации площадки в горизонтальной плоскости..2
Поставленная цель достигается тем, что ведущие и ведомые .колеса установлены диагонально, при етом шарнирно соединенная с рамой пара стоек расположена по диагонали, проходящей через ведомые колеса, а вторая пара - через ведущие н соединена с рамой посредством упругого элемента, состоящего нз установленных одна в другую подвижных обойм, между которыми расположена в сжатом состоянии пружина.
На фиг. 1 изображено предлагаемое устройство,-вид сбоку; на фиг. 2 - то же, схема работы ходовой частя, на фнг. 3разрез AM на фнг. 2 на фиг. 4 — разрез Б-Б на фиг. 2.
Портальный погрузчнк содержит: ходо- вую часть в виде рамы, состоящей нз двух боковин 1 н 2, опнракщихся на ведущие 3 н 4 и ведомые 5 н 6 колеса.
Порта,. погрузчика имеет верхнюю площадку 7 и стойки 8-11. На площадке смонтирован поворотный манипулятор 12 с грузозахватным органом 13. Пара стоУ
6947 4 жина 30 расширяется и выталкивает ниж.нюю обойму 22 совместно с концом одной из боковин 1 и 2 рамы .и соответствующим ведущим колесом вниз. Это перемещение продолжается до тех пор, пока ве5 .душее колесо не касается днища впадины дороги. В процессе перемещения другой конец боковины рамы поворачивается совместно с нижней samoA 14 на пальце 16 о. относительно верхней вилки 15, связанной с соответствующей стойкой IlopTBllB, В результате ведущее колесо занимает такое положение при котором его шина имеет нормальную площадку контакта с грунтом, что обеспечивает повышение надежности !
5 работы погрузчика путем. постоянного контакта его ведущих колес с грунтом.
3 81 ек 8 и 10 портала, расположенных по
\ диагонали, проходящей через ведомые ко- . песа 5 и 6, соединена с боковыми 1 и 2 рамы при помощи шарнирных устройств, каждое иэ которых состоит иэ нижней вилки 14, жестко прикрепленной к боковинам
1 и 2 рамы и верхней 15 прикрепленной к стойкам 8 и 10 портала. В соосных отверстиях верхней и нижней вилок установлен полый соединительный палец 16, опирающийся на втулки 17 гипьзы 18, закрепленной в нижней вилке 14. Палец зафиксирован от продоцьного перемещения с помощью торцовых крышек 19, прикрепленных болтами 20 и стойкам 21 пальца.
Пара стоек Э и 11 портала, расположенных по диагонали, проходящей через ведущие колеса 3 и 4, соединена с боковинами 1 и 2 рамы при помощи упругих устройств, каждое иэ которых состоит иэ нижней обоймы 22, жестко прикреппен- . ной K боковинам рамы, и верхней 23, прикрепленной к стойкам 9 и 11 портала. В верхней обойме установлены ограничительные пальцы 24, прикрепленные к ней боптами.25 и расположенные в овапьных пазах 26 нижней обоймы. В боковинах, выполнякхцих роль дниш нижних обойм 22, при помощи втупки 27 закреплен направляющий шток 28, пропущенный через отверстие в пластине 29 верхней обоймы
23. Между пластиной 29 и боковинами
1 и 2 рамы установлена пружина 30 в сжатом состоянии.
Устройство работает следующим Образом.
- Грузозахватный орган 13 при помощи манипулятора 12 опускается и захватывает груз, посце чего он действует на портал. В результате происходит сжатие пружин 30 упругих устройств до состояния, при котором их витки почти соприкасаются друг с другом; Затем погрузчик начинает передвижение с грузом. При попадании одного из ведущих колес 3 и 4 на неровность дороги, например, впадину.пруФормула изобре тения
Источники информации, принятые во внимание при экспертизе
1. Патент Англии И. 1086917, кл. В 8 В, опублик. 1964 (прототип).
Портальный погрузчик, содержащий снабженную манипулятором площадку, установленную на двух парах стоек, одна из.которых шарнирно соединена с рамой, опирающейся на ведущие и ведомые колеса, отличающийся тем, что, с цепью повышения надежности путем обеспечения продольной и поперечной стабипи30 зации площадки в горизонтальной ппоскости, ведущие и ведомые копеса установлены диагонально, при этом шарнирно соединенная с рамой пара стоек расположена по диаГонапи, проходящей через ведомые копеса, а вторая пара - через ведущие и
35 динен с рамой цредством упругого элемента; состоящего из установленных одна в другую подвижных обойм, между которыми расположена в сжатом состоянии пружина.
816947 б-Б
Составитель Н. Саргсян
r Редактер Т. Мермепштайн Техред . МГолинка Корректор М. Шароши
Заказ 1146/27 Тираж 929 Подписное
ВНИИПИ Государственного комитета, СССР ло делам изобретений и открытий
113035, Москва, Ж 35 Раушская наб., д;.4/5
Филйал ИПП Патент», r. Ужгород, ул, Проектная, 4





www.findpatent.ru
Портальный погрузчик
ПОРТАЛЬНЫЙ ПОГРУЗЧИК, содержащий установленное на портале опорно-поворотное устройство, на котором закреплены манипулятор и кабина, и установленные на шасси накопителидлинномерных грузов, о тличающийся тем, что, с целью улучшения эксплуатационных характеристик путем повышения Рстойчивости погрузчика в транспортном положении и расширения функциональных возможностей, накопители длинномерных грузов смонтированы на шасси с возможностью вертикального перемещения приводом. (Л
COlO3 СОВЕТСНИХ
СОЦИАЛИСТИЧЕСНИХ
РЕСПУБЛИН (50 В б б F 9/06
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Н АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ю
ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬГГИЙ (21) 3388609/27-11 (22) 01,02.82 (46) 07.04.83, Бюл, рр 13 (72) И. Г. Беккер, И. В. Воскобойников, О. Н. Гусев и A. В. Белюкин (71),Специальное проектно-конструкторское технологическое бюро с опытным производством Государственного промышленного объединения ремонтных и машиностроительных заводов (53) 621.868,27(088.8), (56) 1. Авторское свидетельство СССР по заявке Р 3258579/27-11 кл В 66 F9/00 р,1981 (прототип) .
„„SIJ„„1010004 A (5 4 ) (5 7 ) ПОРТАЛЬНЫЙ ПОГРУЗЧИК р содержащий установленное на портале опорно-поворотное устройство, на котором закреплены манипулятор и кабина, и установленные на шасси накопители длинномерных грузов, о тл и ч а ю шийся тем, что, с целью улучшения эксплуатационных харйктеристик путем повышения . рстойчивости погрузчика в транспортном положении и расширения функциональных возможностей, накопители длинномерных грузов смонтированы на шасси с возможностью вертикального перемещения приводом.
Изобретение относится к устройствам для подъема и погрузки громоздких или тяжелых грузов, в частности к погрузчикам.
Известен портальный погрузчик, содержащий установленное на портале опорно-поворотное устройство, на. коТором закреплены манипулятор и кабина, и установленные на шасси накопители длинномерных грузов (13.
Однако известный погруэчик отличается невысокими эксплуатационными характеристиками, ограниченными его невысокой устойчивостью в транспортном положении ограниченной воэмсжностью формирования штабеля длинномерных грузов путем подачи на его вершину.
Цель изобретения — улучшение эксплуатационных характеристик путем повышения устойчивости погрузчика в транспортном положении и расширение функциональных возможностей.
Указанная цель достигается тем,, что портальный погрузчик, содержащий установленное на портале опорноповоротное устройство, на котором закреплены манипулятор и кабина, и установленные на шасси накопители длинномерных грузов, накопители длинномерных грузов смонтированы на шасси с возможностью вертикального перемещения приводом.
На фиг, 1 изображен портальный погрузчик, вид сбоку; на фиг. 2 то же, вид спереди.
Портальный погруз чик содержит портал 1, смонтированный на колесном шасси 2. На портале 1 установлено опорно-поворотное устройство 3, на котором закреплены манипулятор 4 и кабина 5. На шасси 2 смонтированы также накопители длинномерных грузов б с приводами 7 их вертикального перемещения. Манипулятор 4 снабжен приводом 8 и 9 и содержит стрелу 10 с закрепленным на ней челюстным захватом 11 с приводом 12.
При работе портального погрузчика, например на складе переработки древесины, челюстный захват 11 под действием привода 12 захватывает пачку длинномерных грузов, преимущественно лесоматериалов, с помощью приводов 8, 9 и 12 укладывает их в накопители б, находящиеся в нижнем крайнем положении. Затем погруэчик на максимальной скорости перемещается в зону формирования штабеля.
Здесь накопители с длинномерными грузами с помощью приводов 7 поднимаются в крайнее верхнее положение для обеспечения формирования штабеля максимально возможной высоты, над которым может пройти погруэчик.
Использование изобретения позволяет улучшить эксплуатационные характеристики погрузчика и расширить его технологические возможности.
1010004
Заказ 2389/7 Тираж 859
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
Филиал tttttt "Патент", г. Ужгород, ул. Проектная, 4
Составитель П. Григорченко
Редактор М. Келемеш Техред Ж.Кастелевич корректор А. Ференц



www.findpatent.ru
Специальные погрузчики
Строительные машины и оборудование, справочник

Категория:
Строительная техника и оборудование 4
Специальные погрузчикиПогрузчиками называют специальные самоходные подъемно-транспортные машины, способные захватывать свободно лежащие грузы, перемещать их на небольшие расстояния и погружать в транспорт или укладывать в штабель. Их используют для погрузки строительных материалов (песка, гравия, щебня) и штучных грузов.
Различают погрузчики периодического (одноковшовые) и непрерывного действия на пневмоколесном и гусеничном ходу.
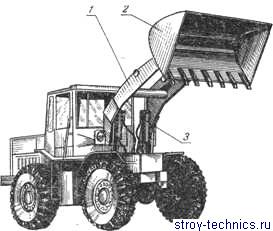
Рис. 1. Одноковшовый фронтальный погрузчик: 1 — стрела; 2 — ковш; 3 — гндродилиндр подъема стрелы.
Одноковшовые погрузчики выпускают в виде навесного оборудования на тракторах, тягачах и специальных шасси. В состав навесного оборудования входят стрела, ковш, гидроцилиндры подъема стрелы и поворота ковша. Основными параметрами современных одноковшовых погрузчиков являются грузоподъемность 0,5…5,0 т, вместимость ковша 0,25…3,0 м3, высота разгрузки 2,3…3,5 м.
Вилочные погрузчики (автопогрузчики) в отличие от одноковшовых предназначаются для погрузки, транспортирования и разгрузки не только сыпучих, но и штучных грузов. Автопогрузчик представляет собой шасси, выполненное на базе узлов грузовых автомобилей, на которое навешивается грузоподъемник. Грузоподъемник имеет гидравлический привод и обеспечивает вертикальное перемещение рабочего органа вдоль направляющей рамы. Основным рабочим органом служит вилочный подхват. Автопогрузчик снабжен набором сменного рабочего оборудования: безблочная стрела, крановая стрела, ковш и др. Подъемник соединен шарнирно с рамой шасси и с помощью гидроцилиндров 8 может наклоняться вперед на 3…5° и назад на 10…15°. Грузоподъемность автопогрузчиков 1…10 т. высота подъема груза до 4,5 м при оборудовании вилами и ковшом и до 7,2 м безблочной стрелой.
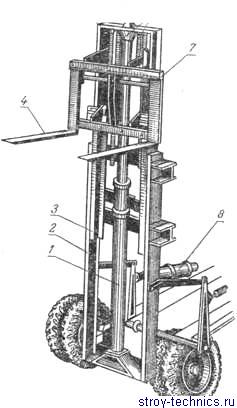
Рис. 2. Грузоподъемник вилочного погрузчика:1 — гидроцнлиндр подъема; 2 — рама основная; 3 — рама выдвижная; 4 — грузозахватное устройство; 5 — грузовая цепь; 6 — звездочка; 7 — каретка; 8— гидроцнлиндр наклона.
Погрузчики непрерывного действия используют для погрузочных работ, для засыпки траншей и фундаментных пазух грунтом, для перегрузки заполнителей и в других случаях. Строительные погрузчики состоят из шасси, зачерпывающего устройства в виде сдвоенного винта, ковшового элеватора и ленточного конвейера. Материал захватывается винтом и подается к движущимся ковшам элеватора, который перегружает материал на поворотный ленточный конвейер.
—-
Портальный контейнеровоз 7801 предназначен для работы с крупнотоннажными контейнерами типоразмеров 1С и 1СС массой брутто 20 т. Шасси погрузчика представляет собой объемный портал, опирающийся на восемь ходовых бездисковых колес, по четыре с каждой стороны, расположенных последовательно друг за другом. Из них четыре передних колеса управляемые и четыре задних — ведущие. Силовым агрегатом служит дизель ЯМЭ-236 мощностью 132 кВт с двухдисковым сцеплением и механической коробкой передач. За ней установлен механизм обратного хода, что позволяет использовать все ступени коробки передач при движении передним и задним ходом. Крутящий момент к главным редукторам сообщается карданными валами и к полуосевым головкам цепными передачами.

Рис. 3. Портальный контейнеровоз 7801:1 и 2 — управляемые и ведущие ходовые колеса; 3 — контейнерный захват; 4 -двигатель
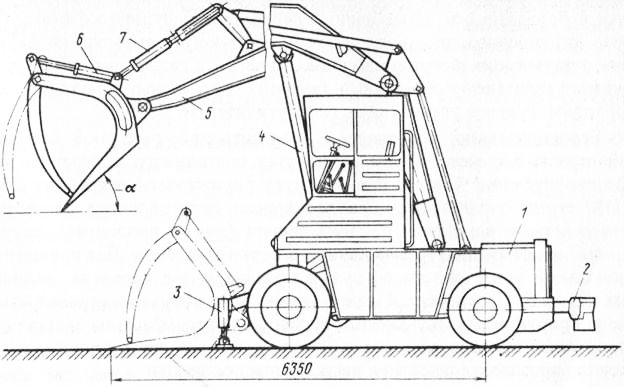
Рис. 4. Погрузчик ЛТ-28 с челюстным захватом для круглого леса
Силовой агрегат и грузоподъемный механизм установлены на верху портала. Кабина водителя — цельнометаллическая, одноместная. Рулевое управление содержит гидроусилитель.
Грузоподъемный механизм состоит из двух горизонтальных гидроцилиндров, соединенных канатами через систему блоков с контейнерным захватом. Застропка контейнера производится за верхние угловые фитинги дистанционно управляемыми кулачками, которые, поворачиваясь на 90° во внутренних полостях фитингов, заходят под их заплечики своими выступами. После фиксации захватных кулачков в рабочем положении контейнер можно перемещать.
В цилиндры грузоподъемного механизма рабочая жидкость нагнетается двумя шестереночными насосами НШ-50/160, а в гидроусилитель руля — шестереночным насосом НШ-32.
Погрузчик ЛТ-28 предназначен для механизации погрузки на железнодорожный открытый подвижной состав, автомобили и прицепы (полуприцепы) к ним, а также выгрузки с них тарно-штучных грузов, сформированных пакетами и перемещаемых отдельными единицами, и длинномерных грузов, преимущественно лесоматериалов. Погрузчик должен применяться на открытых складах с твердым ровным покрытием.
Шасси погрузчика—коробчатое из листового и сортового проката. Передние колеса ведущие, задние управляемые. Машина неподрессорен-ная. Источник энергии — карбюраторный двигатель автомобиля ГАЗ-53А мощностью 84,5 кВт. Трансмиссия механизма передвижения — механическая, содержит агрегат сцепления, реверсивный редуктор, четырехскоростную коробку передач, карданные валы, главную передачу и бортовые открытые цепные передачи к ведущим колесам. Тормоза автономного действия: рабочий (ножной) с тормозйым барабаном и двумя колодками на ходовых колесах, с гидроприводом и вакуумным усилителем; стояночный (ручной) центральный с механическим приводом. Рулевое управление с гидроусилителем.
Грузоподъемник выполнен в виде шарнирно-рычажной сочлененной стрелы с механизмом сохранения постоянного положения вил. Подъем-опускание стрелы производится плунжерным гидроцилиндром. На стреле установлены два поршневых гидроцилиндра двустороннего действия: изменения наклона захвата (вил) в продольном направлении и замыкания (размыкания) верхней челюсти. Для повышения продольной устойчивости погрузчика имеются две передние выдвижные опоры. Противовес может выдвигаться назад за очертание машины в транспортном положении. Механизмы перемещения выдвижных опор и противовеса оборудованы автономными гидроприводами. На рисунке противовес показан в выдвинутом положении.
Сменным рабочим оборудованием погрузчика являются вилы, грейфер и челюстной (клещевой) захват.
Портальные погрузчики А-210, Т-110, Т-130, Т-140 и Т-150 служат для перемещения на открытых складах преимущественно пиломатериалов и других длинномерных грузов, сформированных пакетами или уложенных пачками на подкладках, а также тарно-штучных грузов и контейнеров. Погрузчики могут работать на спланированных площадках с твердым покрытием. Для этих погрузчиков является характерным размещение транспортируемого груза под шасси между левыми и правыми ходовыми колесами. Шасси —неподре ссоренное в виде коробчатой сварной рамы из стальных листов и сортового проката. Ходовая часть содержит четыре колеса с пневмошинами, из них передние управляемые, а задние ведущие. Колея передних и задних колес одинаковая. Рулевое управление с гидроусилителем. Рабочие тормоза — колесные, двухколодочные, стояночные — центральные с механическим приводом, воздействующие на трансмиссию. На погрузчиках А-210, Т-130 и Т-140 ножной тормоз имеет гидравлический привод; Т-110 — пневматический, Т-150 гидравлический с вакуумным усилителем.
Источник энергии – автомобильные карбюраторные двигатели.
Грузоподъемное устройство погрузчиков А-210, Т-110, Т-140 и Т-150 имеет механизмы с гидравлическим приводом: зажима груза с двумя полочными подхватами и подъема-опускания. Погрузчик Т-130 оборудован четырьмя поворачивающимися на 90° в горизонтальной плоскости вилочными подхватами, расположенными попарно с левой и правой сторон. После захватывания груза вилы поднимаются в транспортное положение. Портальный погрузчик А-210 оборудован грузоподъемником, позволяющим опускать грузозахватное устройство на 2 м ниже своей опорной поверхности. Это дает возможность укладывать груз в люки складов, магазинов, производственных помещений или поднимать груз из углубленных хранилищ (рис. 3.7). На погрузчиках Т-140 и Т-150 в передней и задней частях шасси установлены съемные подпружиненные рамки для поджатая при перевозке неплотно уложенных пиломатериалов.
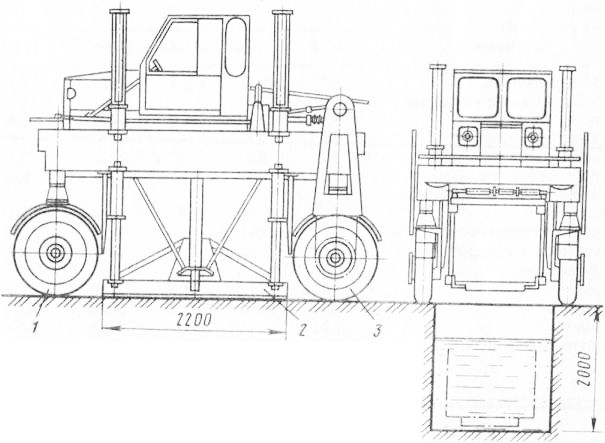
Рис. 5. Портальный погрузчик А-210:1,3 — управляемые и ведущие ходовые колеса; 2 — грузозахватное устройство
Лесопогрузчики изготовляются на базе гусеничных тракторов серийного производства с двухчелюстными захватами, имеющими гидравлический привод. Базой погрузчиков ПЛ-2 и ПЛ-2А являются тракторы Т-100, погрузчиков ПЛ-3 — тракторы Т-130Г, их габариты — ширина 3450 мм и высота соответственно 3195 и 3230 мм, масса 15,2; 17,1 и 20,5 т. Остальные параметры перечисленных погрузчиков и погрузчика П-2С одинаковы.
—
Когда универсальные цогрузчики использовать для штабелирования грузов трудно либо невозможно, применяют специальные погрузчики.
На рис. 6 показан общий вид специального погрузчика для длинномеров с боковым втягивающимся грузоподъемником. Такой погрузчик состоит из самоходного шасси и грузоподъемника, расположенного сбоку шасси. Кроме телескопических рам, механизма подъема и механизма наклона, грузоподъемное устройство имеет механизм выдвижения грузоподъемника.
К штабелю длинномерного груза погрузчик подводят Рис вплотную правым бортом, поднимают вилочный подхват — на необходимую высоту и выдвигают грузоподъемник до упора груза в стенки вил. После этого движением каретки вверх пакет отделяют от штабеля, грузоподъемник и груз втягивают на стол.
На рис. 7 показан специальный погрузчик, применяемый для работы в узких проездах. Он имеет втягивающийся грузоподъемник, расположенный фронтально. В положении, показанном на рисунке, погрузчик подходит к штабелю, захватывает груз и втягивает его.
Благодаря такому устройству груз в транспортном положении располагается над передними колесами.
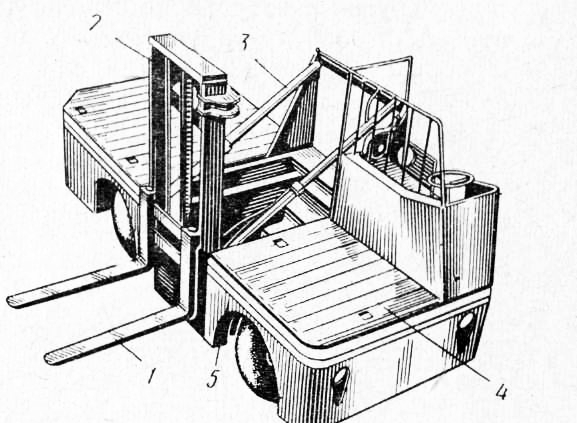
Рис. 6. Специальный погрузчик для перевозки длинномерных грузов: 1 — вилочный подхват, 2 — грузоподъемник, 3 — гидроцилиндры, 4 — стол, 5—шасси
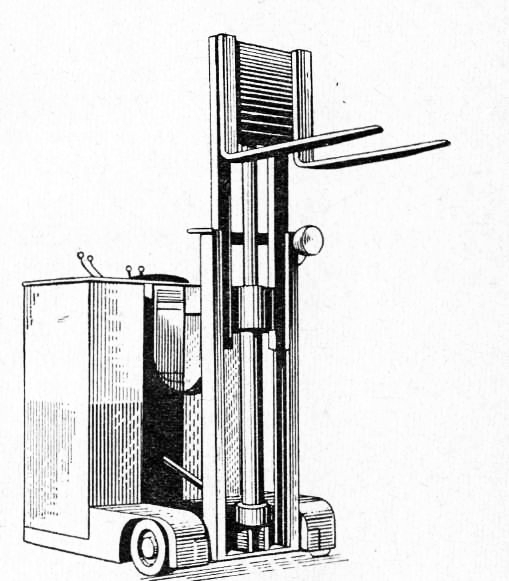
Рис. 7. Специальный погрузчик с фронтальным втягивающимся грузо-подъемником
Читать далее: Самоходные экскаваторы
Категория: - Строительная техника и оборудование 4
Главная → Справочник → Статьи → Форум
stroy-technics.ru
портальный погрузчик - это... Что такое портальный погрузчик?
портальный погрузчикstraddle truck
Русско-английский морской словарь. 2013.
- портальный кран
- портальный пресс
Смотреть что такое "портальный погрузчик" в других словарях:
ПОГРУЗЧИК — Самоходная подъемно транспортная машина на пневмоколесном или гусеничном ходу, оснащенная захватным устройством и используемая для перегрузки штучных либо насыпных грузов в портах. Различают П. периодического и непрерывного действия. К П.… … Морской энциклопедический справочник
Вилочный погрузчик — Toyota … Википедия
Техника движения материалов — одна из важнейших составляющих Логистики. Она отвечает за улучшение логистических процессов, а именно улучшение трех основных целей логистики (увеличения качества, уменьшения времени, снижения затрат) путем использования современных технических… … Википедия
Грузоподъёмный кран — У этого термина существуют и другие значения, см. Кран. Выставка Bauma 2007 Кран грузоподъёмный общее название для подкласса грузоподъёмных маши … Википедия
Индексация кранов — Эта статья или раздел описывает ситуацию применительно лишь к одному региону. Вы можете помочь Википедии, добавив информацию для других стран и регионов. Индексы (краткое кодированное название) определяют тип крана … Википедия
Балткран — ОАО «Балткран» Тип Открытое акционерное общество Год основания 1945 Основатели Министерство монтажных и специальных строительных работ СССР Расположение … Википедия
КП — кавалерийский полк категория прочности каток прицепной катушка пусковая кислородный прибор клепальный пресс Клуб потребителей (приложение к газете Комсомольская правда ) кнопка пусковая кокс пековый кольцевая податливая крепь командир полка… … Словарь сокращений русского языка
КП — командный процессор Словарь: С. Фадеев. Словарь сокращений современного русского языка. С. Пб.: Политехника, 1997. 527 с. КП колёсная пара КП командир пулемёта воен. Словарь: Словарь сокращений и аббревиатур армии и спецслужб. Сост. А. А. Щелоков … Словарь сокращений и аббревиатур
sea_ru_en.academic.ru







423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)