 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
38. Механическая характеристика двигателя. Механическая характеристика
38. Механическая характеристика двигателя.
Механической характеристикой двигателяназывается зависимость частоты вращения ротора от момента на валуn=f(M2). Так как при нагрузке момент холостого хода мал, тоM2 ≈M и механическая характеристика представляется зависимостьюn=f(M). Если учесть взаимосвязьs= (n1 -n) /n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатахn и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателясоответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения.Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
39.Основные точки механической характеристики: критическое скольжение и частота, максимальный момент, пусковой момент, номинальный момент.
Механическая характеристика – это зависимость вращающего момента от скольжения, или, иначе говоря, от числа оборотов:
Из выражения видно, что эта зависимость очень сложна, поскольку, как показывают формулы)и, скольжение входит также в выражения дляI2иcosϕ2. Механическая характеристика асинхронного двигателя дается обычно графически
Начальная точка характеристики соответствует n= 0 иs= 1: это первое мгновение пуска двигателя. Величина пускового вращающего моментаMn– очень важная характеристика эксплуатационных свойств двигателя. ЕслиMnмал, меньше номинального рабочего момента, двигатель может запускаться только вхолостую или при соответственно сниженной механической нагрузке.
Обозначим символом Mnpпротиводействующий (тормозной) момент, создаваемый механической нагрузкой на валу, при которой двигатель пускается. Очевидным условием для возможности запуска двигателя является:Mn>Mnp. Если это условие выполнено, ротор двигателя придет в движение, число оборотов егоnбудет возрастать, а скольжениеsуменьшаться. Как видно из изображения выше, вращающий момент двигателя при этом растет отMnдо максимальногоMm, соответствующего критическому скольжениюskp, следовательно, растет и избыточная располагаемая мощность двигателя, определяемая разностью моментовMиMnp.
Чем больше разность между располагаемым моментом двигателя (возможным при данном скольжении по рабочей характеристике) Ми противодействующимМnp, тем легче режим запуска и тем быстрее двигатель достигает установившейся скорости вращения.
Как показывает механическая характеристика, при некотором числе оборотов (при s=skp) располагаемый вращающий момент двигателя достигает максимально возможного для данного двигателя (при данном напряженииU) значенияMт. Далее двигатель продолжает увеличивать скорость вращения, но располагаемый вращающий момент его быстро уменьшается. При каких-то значенияхnиsвращающий момент двигателя становится равным противодействующему: пуск двигателя заканчивается, число оборотов его устанавливается на значении, соответствующем соотношению:
Это соотношение является обязательным для всех нагрузочных режимов двигателя, то есть для всех значений Mnp, не выходящих за пределы максимального располагаемого вращающего момента двигателяМт. В этих пределах двигатель сам автоматически приспосабливается ко всем колебаниям нагрузки: если во время работы двигателя его механическая нагрузка увеличивается, на какое-то мгновениеMnpстанет больше момента, развиваемого двигателем. Обороты двигателя начнут снижаться, а момент увеличиваться.
Скорость вращения установится на новом уровне, отвечающем равенству MиMnp. При снижении нагрузки процесс перехода к новому нагрузочному режиму будет обратным.
Если нагрузочный момент MnpпревыситМт, двигатель сразу остановится, так как с дальнейшим уменьшением оборотов вращающий момент двигателя уменьшается.
Поэтому максимальный момент двигателя Мтназывается еще опрокидывающим или критическим моментом.
Если в формулу момента подставить:
и
то получим:
Взяв первую производную от Мпои приравняв ее к нулю, найдем, что максимальное значение вращающего момента наступает при условии:
то есть при таком скольжении s=skp, при котором активное сопротивление ротора равно индуктивному сопротивлению
Значения skpу большинства асинхронных двигателей лежат в пределах 10 – 25%.
Если в написанную выше формулу момента вместо активного сопротивления r2подставить индуктивное по формуле
получим:
Максимальный вращающий момент асинхронного двигателя пропорционален квадрату магнитного потока (а значит, и квадрату напряжения) и обратно пропорционален индуктивности рассеяния обмотки ротора.
При постоянстве напряжения, подводимого к двигателю, его поток Фостается практически неизменным.
Индуктивность рассеяния роторной цепи тоже практически постоянна. Поэтому при изменении активного сопротивления в цепи ротора максимальное значение вращающего момента Mтизменяться не будет, но будет наступать при разных скольжениях (с увеличением активного сопротивления ротора – при больших значениях скольжения).
Очевидно, что максимум возможной нагрузки двигателя определяется значением его Mт. Рабочая часть характеристики двигателя лежит в узком диапазоне чисел оборотов отn, соответствующегоMт, до. Приn=n1(конечная точка характеристики)М= 0, так как при синхронной скорости ротораs= 0 иI2= 0.
Номинальный вращающий момент, определяющий значение паспортной мощности двигателя, принимается обычно равным 0,4 – 0,6 от Mт. Таким образом, асинхронные двигатели допускают кратковременные перегрузки в 2 – 2,5 раза.
Основным параметром, характеризующим режим работы асинхронного двигателя, является скольжение s – относительная разность частоты вращения ротора двигателя n и его поля nо: s = (no - n) / no.
Область механической характеристики, соответствующая 0 ≤ s ≤ 1 – область двигательных режимов, причем при s < sкр работа двигателя устойчива, при s > sкр – неустойчива. При s < 0 и s > 1 момент двигателя направлен против направления вращения его ротора (соответственно рекуперативное торможение и торможение противовключением).
Устойчивый участок механической характеристики двигателя часто описывается формулой Клосса, подстановкой в которую параметров номинального режима можно определить критическое скольжение sкр:
,
где: λ = Mkp / Mн – перегрузочная способность двигателя.
Механическая характеристика по данным справочника или каталога приближенно может быть построена по четырем точкам (рис.7.1):
точка 1 – идеальный холостой ход, n = no = 60 f / p, М = 0, где: р - число пар полюсов магнитного поля двигателя;
точка 2 - номинальный, режим: n = nн, М = Мн = 9550 Pн / nн, где Pн – номинальная мощность двигателя в кВт;
точка 3 – критический режим: n = nкр, М = Мкр =λ Мн ;
точка 4 – режим пуска: n = 0, М = Мпуск = β Мн.
При анализе работы двигателя в диапазоне нагрузок до Мн и несколько больше устойчивый участок механической характеристики можно приближенно описать уравнением прямой линии n=n0-вМ, где коэффициент “в” легко определяется подстановкой в уравнение параметров номинального режима nн и Мн.
studfiles.net
38. Механическая характеристика двигателя.
Механической характеристикой двигателяназывается зависимость частоты вращения ротора от момента на валуn=f(M2). Так как при нагрузке момент холостого хода мал, тоM2 ≈M и механическая характеристика представляется зависимостьюn=f(M). Если учесть взаимосвязьs= (n1 -n) /n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатахn и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателясоответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения.Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
39.Основные точки механической характеристики: критическое скольжение и частота, максимальный момент, пусковой момент, номинальный момент.
Механическая характеристика – это зависимость вращающего момента от скольжения, или, иначе говоря, от числа оборотов:
Из выражения видно, что эта зависимость очень сложна, поскольку, как показывают формулы)и, скольжение входит также в выражения дляI2иcosϕ2. Механическая характеристика асинхронного двигателя дается обычно графически
Начальная точка характеристики соответствует n= 0 иs= 1: это первое мгновение пуска двигателя. Величина пускового вращающего моментаMn– очень важная характеристика эксплуатационных свойств двигателя. ЕслиMnмал, меньше номинального рабочего момента, двигатель может запускаться только вхолостую или при соответственно сниженной механической нагрузке.
Обозначим символом Mnpпротиводействующий (тормозной) момент, создаваемый механической нагрузкой на валу, при которой двигатель пускается. Очевидным условием для возможности запуска двигателя является:Mn>Mnp. Если это условие выполнено, ротор двигателя придет в движение, число оборотов егоnбудет возрастать, а скольжениеsуменьшаться. Как видно из изображения выше, вращающий момент двигателя при этом растет отMnдо максимальногоMm, соответствующего критическому скольжениюskp, следовательно, растет и избыточная располагаемая мощность двигателя, определяемая разностью моментовMиMnp.
Чем больше разность между располагаемым моментом двигателя (возможным при данном скольжении по рабочей характеристике) Ми противодействующимМnp, тем легче режим запуска и тем быстрее двигатель достигает установившейся скорости вращения.
Как показывает механическая характеристика, при некотором числе оборотов (при s=skp) располагаемый вращающий момент двигателя достигает максимально возможного для данного двигателя (при данном напряженииU) значенияMт. Далее двигатель продолжает увеличивать скорость вращения, но располагаемый вращающий момент его быстро уменьшается. При каких-то значенияхnиsвращающий момент двигателя становится равным противодействующему: пуск двигателя заканчивается, число оборотов его устанавливается на значении, соответствующем соотношению:
Это соотношение является обязательным для всех нагрузочных режимов двигателя, то есть для всех значений Mnp, не выходящих за пределы максимального располагаемого вращающего момента двигателяМт. В этих пределах двигатель сам автоматически приспосабливается ко всем колебаниям нагрузки: если во время работы двигателя его механическая нагрузка увеличивается, на какое-то мгновениеMnpстанет больше момента, развиваемого двигателем. Обороты двигателя начнут снижаться, а момент увеличиваться.
Скорость вращения установится на новом уровне, отвечающем равенству MиMnp. При снижении нагрузки процесс перехода к новому нагрузочному режиму будет обратным.
Если нагрузочный момент MnpпревыситМт, двигатель сразу остановится, так как с дальнейшим уменьшением оборотов вращающий момент двигателя уменьшается.
Поэтому максимальный момент двигателя Мтназывается еще опрокидывающим или критическим моментом.
Если в формулу момента подставить:
и
то получим:
Взяв первую производную от Мпои приравняв ее к нулю, найдем, что максимальное значение вращающего момента наступает при условии:
то есть при таком скольжении s=skp, при котором активное сопротивление ротора равно индуктивному сопротивлению
Значения skpу большинства асинхронных двигателей лежат в пределах 10 – 25%.
Если в написанную выше формулу момента вместо активного сопротивления r2подставить индуктивное по формуле
получим:
Максимальный вращающий момент асинхронного двигателя пропорционален квадрату магнитного потока (а значит, и квадрату напряжения) и обратно пропорционален индуктивности рассеяния обмотки ротора.
При постоянстве напряжения, подводимого к двигателю, его поток Фостается практически неизменным.
Индуктивность рассеяния роторной цепи тоже практически постоянна. Поэтому при изменении активного сопротивления в цепи ротора максимальное значение вращающего момента Mтизменяться не будет, но будет наступать при разных скольжениях (с увеличением активного сопротивления ротора – при больших значениях скольжения).
Очевидно, что максимум возможной нагрузки двигателя определяется значением его Mт. Рабочая часть характеристики двигателя лежит в узком диапазоне чисел оборотов отn, соответствующегоMт, до. Приn=n1(конечная точка характеристики)М= 0, так как при синхронной скорости ротораs= 0 иI2= 0.
Номинальный вращающий момент, определяющий значение паспортной мощности двигателя, принимается обычно равным 0,4 – 0,6 от Mт. Таким образом, асинхронные двигатели допускают кратковременные перегрузки в 2 – 2,5 раза.
Основным параметром, характеризующим режим работы асинхронного двигателя, является скольжение s – относительная разность частоты вращения ротора двигателя n и его поля nо: s = (no - n) / no.
Область механической характеристики, соответствующая 0 ≤ s ≤ 1 – область двигательных режимов, причем при s < sкр работа двигателя устойчива, при s > sкр – неустойчива. При s < 0 и s > 1 момент двигателя направлен против направления вращения его ротора (соответственно рекуперативное торможение и торможение противовключением).
Устойчивый участок механической характеристики двигателя часто описывается формулой Клосса, подстановкой в которую параметров номинального режима можно определить критическое скольжение sкр:
,
где: λ = Mkp / Mн – перегрузочная способность двигателя.
Механическая характеристика по данным справочника или каталога приближенно может быть построена по четырем точкам (рис.7.1):
точка 1 – идеальный холостой ход, n = no = 60 f / p, М = 0, где: р - число пар полюсов магнитного поля двигателя;
точка 2 - номинальный, режим: n = nн, М = Мн = 9550 Pн / nн, где Pн – номинальная мощность двигателя в кВт;
точка 3 – критический режим: n = nкр, М = Мкр =λ Мн ;
точка 4 – режим пуска: n = 0, М = Мпуск = β Мн.
При анализе работы двигателя в диапазоне нагрузок до Мн и несколько больше устойчивый участок механической характеристики можно приближенно описать уравнением прямой линии n=n0-вМ, где коэффициент “в” легко определяется подстановкой в уравнение параметров номинального режима nн и Мн.
studfiles.net
Механическая характеристика
 Рис. 11.11
Рис. 11.11
|
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу  . Так как при нагрузке момент холостого хода мал, то
. Так как при нагрузке момент холостого хода мал, то  и механическая характеристика представляется зависимостью
и механическая характеристика представляется зависимостью  . Если учесть взаимосвязь
. Если учесть взаимосвязь  , то механическую характеристику можно получить из (11.43) или (11.46), представив ее графическую зависимость в координатах
, то механическую характеристику можно получить из (11.43) или (11.46), представив ее графическую зависимость в координатах  и
и  (рис. 11.11).
(рис. 11.11).
Пример 11.1. Трехфазный асинхронный двигатель с короткозамкнутым ротором питается от сети с напряжением  = 380 В при
= 380 В при  = 50 Гц. Параметры двигателя:
= 50 Гц. Параметры двигателя:  = 14 кВт,
= 14 кВт,  = 960 об/мин,
= 960 об/мин,  = 0,85,
= 0,85,  = 0,88, кратность максимального момента
= 0,88, кратность максимального момента  = 1,8.
= 1,8.
Определить: номинальный ток в фазе обмотки статора, число пар полюсов, номинальное скольжение, номинальный момент на валу, критический момент, критическое скольжение и построить механическую характеристику.
Решение. Номинальная мощность, потребляемая из сети
 кВт.
кВт.
Номинальный ток, потребляемый из сети
 А.
А.
Число пар полюсов
 ,
,
где  = 1000 – синхронная частота вращения, ближайшая к номинальной частоте = 960 об/мин.
= 1000 – синхронная частота вращения, ближайшая к номинальной частоте = 960 об/мин.
Номинальное скольжение
 .
.
Номинальный момент на валу двигателя
 Н·м.
Н·м.
Критический момент
 Н·м.
Н·м.
Критическое скольжение находим по (11.46), подставив  ,
,  и
и 
 .
.
Для построения механической характеристики с помощью  определим характерные точки: точка холостого хода
определим характерные точки: точка холостого хода  = 0, = 1000 об/мин, = 0, точка номинального режима
= 0, = 1000 об/мин, = 0, точка номинального режима  = 0,04, = 960 об/мин,
= 0,04, = 960 об/мин,  = 139,3 Н·м и точка критического режима
= 139,3 Н·м и точка критического режима  = 0,132,
= 0,132,  = 868 об/мин,
= 868 об/мин,  =250,7 Н·м.
=250,7 Н·м.
Для точки пускового режима  = 1, = 0 из (11.46) находим
= 1, = 0 из (11.46) находим
 Н·м.
Н·м.
По полученным данным строят механическую характеристику. Для более точного построения следует увеличить число расчетных точек и для заданных скольжений по (11.46) определить моменты, а по (11.4) – частоту вращения.
11.13. Пуск и регулирование скорости асинхронного двигателя
Способы пуска
При пуске ротор разгоняется от частоты вращения = 0 до некоторой частоты . Пуск возможен только тогда, когда вращающий момент двигателя больше момента сопротивления. Ниже рассмотрены основные способы пуска.
Прямой пуск осуществляется включением обмотки статора на напряжение сети. В первый момент скольжения = 1, пусковой ток максимален
 . (11.47)
. (11.47)
Кратность пускового тока  .
.
Пусковой момент по (11.43)
 . (11.48)
. (11.48)
Анализ (11.48) показывает, что при прямом пуске возникают большой бросок тока и относительно небольшой пусковой момент. Это оказывает отрицательное влияние на возможность пуска самого электродвигателя и на устойчивость работы других электродвигателей из-за снижения напряжения.
Пуск переключением обмотки статора применяется для двигателей, работающих при соединении обмоток статора в треугольник. При пуске обмотка статора с помощью переключателя соединяется в звезду. В результате линейный пусковой ток уменьшается примерно в три раза, пусковой момент также уменьшается в три раза. Если пусковой момент достаточен для разгона электропривода, то такой пуск допустим. После пуска обмотку статора переключают на схему треугольника, и двигатель работает в нормальном режиме.
При автотрансформаторном пуске обмотка статора включается на пониженное напряжение с помощью автотрансформатора. Двигатель разгоняется при пусковом токе и моменте в  раз меньше по сравнению с прямым пуском, где
раз меньше по сравнению с прямым пуском, где  – коэффициент трансформации понижающего автотрансформатора. В конце разгона двигатель переключается на напряжение сети.
– коэффициент трансформации понижающего автотрансформатора. В конце разгона двигатель переключается на напряжение сети.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора чере5з контактные кольца и щетки. Сопротивление пускового резистора  в фазе выбирают таким, чтобы пусковой момент был максимальным. Так как
в фазе выбирают таким, чтобы пусковой момент был максимальным. Так как  = 1 и
= 1 и  , то с помощью (11.45) находим
, то с помощью (11.45) находим
 ,
,
откуда
 .
.
Пуск двигателя поясняется схемой на рис. 11.11. В момент пуска двигатель развивает максимальный момент и разгон происходит на участке  механической характеристики 1.
механической характеристики 1.
 Рис. 11.12
Рис. 11.12
|
В момент, соответствующий точке  , выключается первая ступень резистора и момент скачком увеличивается до точки
, выключается первая ступень резистора и момент скачком увеличивается до точки  механической характеристики 2; при разгоне до точки
механической характеристики 2; при разгоне до точки  выключается вторая ступень резистора и рабочая точка скачком переходит в точку
выключается вторая ступень резистора и рабочая точка скачком переходит в точку  естественной механической характеристики 3. Установившийся режим наступает в точке
естественной механической характеристики 3. Установившийся режим наступает в точке  соответствующей равенству моментов двигателя и нагрузки. Резистор закорачивается и щетки отводятся от колец.
соответствующей равенству моментов двигателя и нагрузки. Резистор закорачивается и щетки отводятся от колец.
Такой способ пуска применяют, как правило, для двигателей большой мощности при ограниченном пусковом токе и высоких требованиях к приводу. Недостатками способа являются значительные потери электрической энергии в пусковом резисторе и сложность устройства ротора.
Пример 11.2. Асинхронный двигатель с фазным ротором имеет номинальные параметры: = 30 кВт, = 1500 об/мин,  = 0,03 Ом и
= 0,03 Ом и  = 0,144 Ом. Определить сопротивление добавочного резистора
= 0,144 Ом. Определить сопротивление добавочного резистора  , который должен быть включен в фазу ротора для обеспечения пускового момента, равного критическому.
, который должен быть включен в фазу ротора для обеспечения пускового момента, равного критическому.
Решение. Согласно (11.45) в режиме пуска
 ,
,
откуда
 Ом.
Ом.
Похожие статьи:
poznayka.org
Механические характеристики производственных механизмов и электрических двигателей. Понятие жесткости механической характеристики
Для правильного и экономичного использования электродвигателей необходимо выявить механических характеристик двигателя характеристике производственного механизма.
Зависимость между приведенными к валу двигателя скоростью и моментом сопротивления механизма  называют механической характеристикой производственного механизма.
называют механической характеристикой производственного механизма.
Различные производственные механизмы обладают различными механическими характеристиками. Однако можно выделить отдельные категории механизмов на основании вида механической характеристики. Общий вид характеристики
 ,
,
где  – момент сопротивления производственного механизма при скорости
– момент сопротивления производственного механизма при скорости  ;
;  – момент сопротивления трения в движущихся частях механизма;
– момент сопротивления трения в движущихся частях механизма;  – момент сопротивления при номинальной скорости
– момент сопротивления при номинальной скорости  ; x – показатель скорости.
; x – показатель скорости.
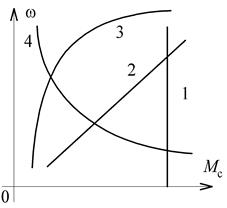
1. Не зависящая от скорости механическая характеристика (прямая 1 на рис. 2.8, а). показатель степени  и момент не зависит от скорости. Такой характеристикой обладают подъемные краны, лебедки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи. Сюда же можно отнести механизмы, у которых основным моментом сопротивления является момент трения.
и момент не зависит от скорости. Такой характеристикой обладают подъемные краны, лебедки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи. Сюда же можно отнести механизмы, у которых основным моментом сопротивления является момент трения.
2. Линейно-возрастающая механическая характеристика (прямая 2 на рис. 2.8, а) В этом случае  и момент сопротивления линейно зависит от скорости . Главный привод некоторых станков.
и момент сопротивления линейно зависит от скорости . Главный привод некоторых станков.
3. Параболическая механическая характеристика (кривая 3 на рис. 2.8, а). Этой характеристике соответствует  . Механизмы, обладающие такой зависимостью, называют механизмы с чисто-вентиляторной нагрузкой. Сюда относят центробежные насосы, гребные винты.
. Механизмы, обладающие такой зависимостью, называют механизмы с чисто-вентиляторной нагрузкой. Сюда относят центробежные насосы, гребные винты.
4. Нелинейно-спадающая механическая характеристика (кривая 4 на рис. 2.8, а). При этом  и момент сопротивления
и момент сопротивления  изменяется обратно-пропорционально скорости, а мощность потребляемая механизмом остаётся постоянной. В эту группу относят некоторые токарные, расточные, фрезерные станки, моталки в металлургическом производстве.
изменяется обратно-пропорционально скорости, а мощность потребляемая механизмом остаётся постоянной. В эту группу относят некоторые токарные, расточные, фрезерные станки, моталки в металлургическом производстве.
Существуют механизмы и с промежуточными характеристиками.
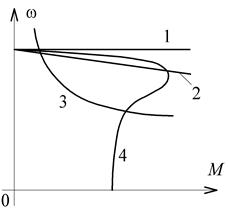
Механической характеристикой электродвигателя называют зависимость его угловой скорости от вращающего момента  . Наиболее распространённые виды характеристик двигателей представлены на рис. 2.8, б.
. Наиболее распространённые виды характеристик двигателей представлены на рис. 2.8, б.
 |  |
| а | б |
| Рис. 2.8. Механические характеристики производственных механизмов (а) и электродвигателей (б) |
Механическая характеристика характеризуется жесткостью. Под жесткостью понимают отношение приращения момента к приращению скорости, которое было вызвано приращением момента. Жесткость механической характеристики показывает, как (насколько) изменяется скорость двигателя (механизма) при изменении момента на валу двигателя (статического момента). В общем случае жесткость  вычисляется по формуле
вычисляется по формуле
 .
.
Для линейных механических характеристик производные могут быть заменены приращениями
 .
.
Механические характеристики двигателей в зависимости от жесткости могут быть разделены на следующие категории:
1. Абсолютно жесткая механическая характеристика (  ) – скорость при изменении момента остаётся неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 2.8, б).
) – скорость при изменении момента остаётся неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 2.8, б).
2. Жесткая механическая характеристика. Скорость двигателя уменьшается не значительно при изменении момента. Такой характеристикой обладают двигатели постоянного тока с независимым возбуждением (ДПТ с НВ). И асинхронные двигатели (АД) в пределах рабочей характеристики (прямая 2 и кривая 3 на рис. 2.8, б).
3. Мягкая механическая характеристика – при изменении момента значительно меняется скорость (кривая 3 на рис.2.8, б). Такой характеристикой обладают ДПТ с последовательным возбуждением, особенно в зоне малых моментов.
4. Абсолютно мягкая механическая характеристика (  ) – такая характеристика, при которой момент двигателя при изменении скорости остаётся неизменным. Такими характеристиками обладают замкнутые САР тока при работе в режиме ограничения тока якоря.
) – такая характеристика, при которой момент двигателя при изменении скорости остаётся неизменным. Такими характеристиками обладают замкнутые САР тока при работе в режиме ограничения тока якоря.
Асинхронный двигатель обладает механической характеристикой с переменной жесткостью.
Похожие статьи:
poznayka.org
Вид - механическая характеристика - Большая Энциклопедия Нефти и Газа, статья, страница 1
Вид - механическая характеристика
Cтраница 1
Вид механической характеристики ( рис. 18.12) зависит от активного сопротивления R2 в цепи ротора. [1]
Вид механической характеристики п - ( М) или М f ( n) при U const зависит от того, как с изменением момента М изменяется поток машины Фв, и различен для двигателей с различными способами возбуждения. [2]
Вид механической характеристики определяется главным образом конструкцией якоря, влияющей на соотношение его активного и реактивного сопротивлений при изменяющемся скольжении. Индуктивное сопротивление пропорционально скольжению. Активное сопротивление зависит сложным образом от скольжения в связи с изменением глубины проникновения поля, зависящей от частоты, а также от конфигурации и покрытия поверхности якоря. Применение медной гильзы на якоре, узких аксиальных разрезов, короткозамкнутой обмотки уменьшает критическое скольжение. При массивном якоре максимум момента смещается в сторону больших скольжений тем сильнее, чем меньше диаметр якоря. [4]
Вид механической характеристики при некоторых значениях Rm и Rn показан на рис. 4.14. Сопоставление механических характеристик при реостатном регулировании и при регулировании по схеме на рис. 4 13 показывает, что модуль жесткости в последнем случае значительно выше. [6]
Вид механической характеристики определяет устойчивость работы двигателя под нагрузкой. [8]
Вид механической характеристики определяет зону устойчивой работы и регулировочные свойства асинхронного двигателя. Асинхронный двигатель работает устойчиво в пределах скольжений от s0 до S SK, где возможное уменьшение или увеличение скорости приводит соответственно к увеличению или уменьшению вращающего момента двигателя, что при неизменном моменте нагрузки на валу приведет к восстановлению первоначальной скорости вращения. В зоне от SSK до s l соотношение обратное, что соответствует неустойчивой работе. [9]
Вид механической характеристики п - f ( М) или Mf ( n) при U const зависит от того, как с изменением момента М изменяется поток машины Фб, и различен для двигателей, с различными способами возбуждения. [10]
Вид механических характеристик рассматриваемого двигателя показан на рис. 42 - 7, где штриховая линия разделяет области устойчивой ( /) и неустойчивой ( 2) работы. В устойчивой области эти характеристики подобны характеристикам последовательного двигателя постоянного тока. Для регулирования скорости вращения двигатель снабжается механизмом поворота щеток. [11]
Какой вид механической характеристики требуется для электропривода ротора. [12]
Различают три вида механических характеристик электродвигателей ( рис. 4): твердую, жесткую и мягкую. [14]
Страницы: 1 2 3 4
www.ngpedia.ru
Механическая характеристика - система - Большая Энциклопедия Нефти и Газа, статья, страница 1
Механическая характеристика - система
Cтраница 1
Механические характеристики системы Г - Д ( рис. 3.2) ниже частоты вращения идеального холостого хода п0 представляют собой прямые линии, параллельные друг другу. [2]
Механические характеристики системы ионный преобразователь - двигатель подобны характеристикам системы генератор - двигатель с некоторым искажением в зоне, близкой к холостому ходу двигателя. Для повышения жесткости механических характеристик и увеличения диапазона регулирования скорости вращения двигателя в этих системах используют обратные связи по току и напряжению якоря двигателя. [3]
Из сравнения механических характеристик системы РТП - Д ( см. рис. 28.6) следует, что наилучшие характеристики имеет система с совместным согласованным управлением тиристорными группами. Раздельное управление приводит к появлению нелиней-ностей и разрывов характеристик при малых нагрузках, вызванных прерывистостью тока в якорной цепи. [4]
В этом случае механические характеристики системы ШИП - двигатель линейны. Они аналогичны механическим характеристикам привода, в котором скорость регулируется изменением сопротивления в цепи якоря машины. [5]
Таким образом, механические характеристики системы ШИП двигатель постоянного тока аналогичны механическим характеристикам системы генератор - двигатель. [7]
На рис. 1 - 37 показаны механические характеристики системы Г - Д при регулировании изменением питающего напряжения и потока двигателя. [8]
На рис. 22 проиллюстрирован графический расчет механических характеристик системы электропривода десятитонной подъемной лебедки с асинхронным двигателем МТ-42-8. По выбранному приводному асинхронному двигателю и элементам схемы ( в рассматриваемом случае исключен промежуточный трансформатор роторной цепи) определены исходные данные: Л / от, Fno, SP, по которым на рис. 22 0 построены расчетные тормозные характеристики и характеристики используемых при этом величин h и NT. II и III квадрантах характеристики пружин тормозной системы и построенные в I квадранте тяговые характеристики ЭГТ в функции скольжения параметра управления ДП. Ход построения тормозной характеристики и кривых других переменных указан стрелками. [9]
На рис. 4 - 41 изображена серия механических характеристик системы для зон прерывистого и непрерывного тока в якоре. Граница между зонами согр / ( 7гр) обозначена штриховой линией. [10]
Ср) ПРИ Y const, являющиеся механическими характеристиками системы в относительных единицах. [11]
Заметим еще, что часть параметров являются механическими характеристиками системы, таковы масса, объем, давление. К ним принадлежит фактически и энергия системы, складывающаяся из механических энергий входящих в нее частиц. Другие параметры описывают электрические или, скажем, оптические свойства. А третьи специфичны для термодинамики как науки о тепловых свойствах тел; это, например, температура, энтропия и др. Известно, что давление, энер гия и другие характеристики систем зависят от температуры. Отсюда видно, что эти термодинамические величины не вполне тождественны со своими механическими аналогами. [12]
Таким образом, механические характеристики системы ШИП двигатель постоянного тока аналогичны механическим характеристикам системы генератор - двигатель. [14]
Это даст возможность иметь две тормозные характеристики, и, следовательно, семейство механических характеристик системы расширяется. [15]
Страницы: 1 2 3
www.ngpedia.ru
Жесткая механическая характеристика - Большая Энциклопедия Нефти и Газа, статья, страница 1
Жесткая механическая характеристика
Cтраница 1
Жесткая механическая характеристика - характеристика, у которой при значительном изменении момента частота вращения почти не изменяется. [1]
Жесткая механическая характеристика, при которой с увеличением момента скорость снижается, но не очень сильно. [2]
Жесткая механическая характеристика, при которой скорость с изменением момента хотя и падает, но в малой степени. [4]
Жесткая механическая характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. [5]
Жесткая механическая характеристика - это характеристика, при которой скорость с изменением Момента хотя и уменьшается, но в малой степени. [6]
Еще более жесткими механическими характеристиками обладает двигатель, включенный по схеме, данной на рис. 3 - 50, д, что позволяет обеспечить больший диапазон регулирования скорости, чем в предыдущих случаях. [8]
Для получения жестких механических характеристик п - F ( M) в схеме электропривода должно быть предусмотрено автоматическое регулирование степени насыщет ния дросселей, обеспечивающее относительную стабилизацию скорости вращения якоря при переменной нагрузке на валу электродвигателя. [10]
Двигатель имеет жесткую механическую характеристику. Скорость его вращения не регулируется. Используется для нереверсивных приводов мощностью от 10 до 500 кат. [12]
Такой же жесткой механической характеристикой, но значительно меньшими возможностями регулирования скорости обладают двигатели параллельного ( шунтового) возбуждения. Кроме того, они весьма чувствительны к нестабильности напряжения питающей сети, так как это обусловливает изменение тока якоря при неизменной нагрузке на валу. В силу указанных особенностей эти двигатели применяют в приводах металлорежущих станков, где требуется постоянство угловой скорости в определенном диапазоне изменения нагрузки. При эксплуатации двигателей независимого и параллельного возбуждения предусматривают автоматические устройства защиты якорных цепей от недопустимо больших токов. В двигателях параллельного возбуждения предусматривают также защиту от снижения напряжения на обмотке возбуждения ниже определенного предела. [13]
Двигатель Шраге имеет жесткие механические характеристики. Применяется в текстильной, резиновой, полиграфической и бумажной промышленности. Изготовляется мощностью до 50 кет. Стоимость его высока, требует квалифицированного обслуживания. [14]
Они походят на менее жесткие механические характеристики системы генератор-двигатель. Снижение жесткости происходит в основном за счет падения напряжения в выпрямителе. При использовании кремниевых управляемых вентилей жесткость характеристик может быть увеличена. [15]
Страницы: 1 2 3 4 5
www.ngpedia.ru





423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)