 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Магнитный усилитель - принцип действия и сферы применения. Магнитный усилитель принцип работы
Магнитные усилители, их назначение и классификация
Измерительные устройства систем автоматического регулирования обычно вырабатывают маломощные сигналы управления, которые непосредственно не могут привести в действие исполнительные механизмы. Малая мощность сигналов объясняется стремлением уменьшить влияние нагрузки на точность измерений, а также конструктивными особенностями и физической природой измерительных устройств.
Чтобы получить мощность, необходимую для работы исполнительных устройств, применяют магнитные усилители. Они практически нечувствительны к вибрациям и механическим воздействиям, позволяют получить на выходе значительные токи, просты в эксплуатации, сравнительно недороги и очень надежны.
В зависимости от характера физических процессов, определяющих принцип работы магнитного усилителя, различают дроссельные и трансформаторные магнитные усилители.
В дроссельных усилителях рабочая обмотка (обмотка переменного тока) выполняет функцию дроссельной «заслонки», ограничивающей ток в нагрузке, включенной (обычно последовательно) в цепь рабочей обмотки.
В трансформаторных усилителях цепь нагрузки электрически не связана с цепью питания. Передача энергии из цепи питания в цепь нагрузки осуществляется за счет магнитной связи между ними. При этом, воздействуя на общий магнитный поток, сцепленный с витками обмоток цепей питания и нагрузки, можно менять мощность, передаваемую в цепь нагрузки.
Как дроссельные, так и трансформаторные усилители могут быть собраны по однотактной или двухтактной схеме. В однотактных магнитных усилителях фаза тока в нагрузке не зависит от полярности входного сигнала. В двухтактных магнитных усилителях фаза тока в нагрузке меняется на 180° при изменении полярности тока в обмотке управления.
В зависимости от типа обратной связи различают магнитные усилители с внешней обратной связью, у которых выпрямленный рабочий ток проходит по специальной обмотке обратной связи, и магнитные усилители с внутренней обратной связью, у которых постоянная составляющая рабочего тока проходит по той же рабочей обмотке (дополнительная обмотка отсутствует).
Двухтактный магнитный усилитель может быть собран по дифференциальной схеме с подмагничиванием и с обратной связью, а также по мостовой схеме.
Принцип действия дроссельного магнитного усилителя
Ферромагнитный материал, из которого изготовляются магнитопроводы магнитных усилителей, можно представить состоящим из отдельных малых областей (доменов), самопроизвольно намагничивающихся в различных направлениях.
При наложении на магнитопровод магнитного поля обмотки эти намагниченные области («магнитики») ориентируются преимущественно вдоль силовых линий внешнего поля, в результате чего общий магнитный поток резко возрастает. При изменении полярности тока в обмотке «магнитики» поворачиваются и направление общего магнитного потока в магнитопроводе изменяется на обратное.
Будем называть магнитодвижущей силой (МДС) Aw произведение тока в обмотке на число ее витков. Эта величина пропорциональна току, так как число витков обмотки обычно постоянно.
На рис. 10.15 изображена полученная опытным путем зависимость магнитного потока в магнитопроводе от количества ампер-витков его обмоток. Это усредненная кривая, характерная для магнитомягких материалов.
На рис. 10.16 изображен магнитопровод, на который намотаны две обмотки: рабочая wр, питаемая синусоидальным напряжением, и управляющая wу к которой подводится усиливаемое напряжение.
Предположим, что управляющая обмотка обесточена, а МДС рабочей обмотки изменяются по синусоидальному закону от +Awр до —Awр При этом магнитный поток в магнитопроводе изменяется на ДФ (см. рис. 10.15).
Предположим, что через управляющую обмотку проходит ток и ее МДС равна некоторому значению Awy. МДС рабочей обмотки изменяется в прежних пределах от +Awр до —Awp. При этом магнитный поток в магнитопроводе изменяется на Ф'. Из рис. 10.15 видно, что Ф' значительно меньше Ф.
Таким образом, в первом случае скорость изменения магнитного потока будет большой, во втором — незначительной. ЭДС самоиндукции рабочей обмотки, пропорциональная скорости изменения магнитного потока (закон электромагнитной индукции), в первом случае будет значительно больше, чем во втором. Эта ЭДС направлена навстречу приложенному напряжению и ограничивает ток в цепи. При постоянном действующем значении синусоидального напряжения питания в первом случае ток в рабочей обмотке будет меньше, чем во втором.
Изменяя магнитное состояние магнитопровода, можно менять ток в рабочей обмотке, а следовательно, и в нагрузке Zн, которая включена последовательно
С wp.
Пока магнитопровод не насыщен, основная часть напряжения питания тратится на преодоление ЭДС самоиндукции рабочей обмотки, падение напряжения на нагрузке невелико, ток в нагрузке мал. Когда магнитопровод переходит в насыщенное состояние, ЭДС самоиндукции рабочей обмотки практически исчезает и все напряжение питания оказывается приложенным к нагрузке. Ток в нагрузке возрастает.
На рис. 10.17 изображена зависимость тока в нагрузке (рабочего тока) IР от тока в обмотке управления Iу. Из рисунка видно, что с увеличением тока управления Iу, т. е. по мере насыщения магнитопровода и уменьшения ЭДС самоиндукции рабочей обмотки, увеличивается ток в нагрузке Iр. При этом небольшие изменения тока Iу вызывают значительные изменения рабочего тока. Следовательно, устройство работает как усилитель.
Следует отметить, что в действительности картина физических процессов несколько сложнее. В современных магнитных усилителях применяются магнитопроводы с прямоугольной кривой намагничивания. Они либо сразу размагничиваются, либо полностью насыщаются. Поэтому перераспределение напряжения питания между рабочей обмоткой и нагрузкой происходит в течение каждого периода. Например, в течение четверти каждого периода напряжение питания приложено к нагрузке, а в течение 3/4 периода гасится на рабочей обмотке (рис. 10.18).
Изменяя ток управления в обмотке wу, это распре деление можно изменить увеличив или уменьшив часть периода, в течение которой напряжение приложено к нагрузке, а следовательно, увеличив или уменьшив (в среднем) ток в нагрузке.
Дроссельный магнитный усилитель сравнительно прост как по устройству, так и по принципу работы, однако его применение в системах автоматического регулирования ограничено, так как ему присущ ряд недостатков. Прежде всего отметим существенную не линейность зависимости тока в нагрузке от тока управления (см. рис. 10.17). Так, при токе управления Iу = 0 ток нагрузке Этот нулевой ток I0 увеличивает погрешность регулирования и потери мощности. Другой недостаток дроссельного усилителя — сравнительно низкий коэффициент усиления. Кроме того, во многих случаях существенно и то, что дроссельный усилитель не реагирует на полярность сигнала управления. Эти недостатки устранены в более сложных схемах магнитных усилителей.
studfiles.net
Магнитный усилитель - принцип действия и сферы применения
Магнитный усилитель — это такой статический электрический аппарат, который предназначен для управления значением величины переменного тока с помощью постоянного. Принцип действия такого прибора основан на нелинейных характеристиках намагниченного магнитопровода. Магнитный усилитель часто применяют в сфере автоматического регулирования электрических двигателей ( как синхронных, так и асинхронных), которые работают на переменном токе.
Устройство такого приспособления довольно простое. Магнитный усилитель состоит из рабочей обмотки, которая находится на его крайних стержнях. Она сделана из двух последовательно соединенных катушек. Обмотка управления с большим количеством витков размещается на среднем стержне. Если на нее ток не подаётся, а проходит по рабочей обмотке, которая последовательно соединена с нагрузкой, то магнитопровод не будет насыщаться подведенным переменным напряжением из-за небольшого количества витков. В этом случае все напряжение будет падать на сопротивление рабочей обмотки (оно в этом случае будет реактивным). На нагрузке в этом случае будет выделяться малая мощность.

Магнитопровод такого прибора, как магнитный усилитель, насыщается благодаря тому, что ток проходит по обмотке управления. Из за большого количества витков на ней достаточно даже небольшого значения тока. В результате такого процесса реактивная составляющая сопротивления рабочей обмотки будет резко уменьшаться, а значение тока в цепи регулирования будет стремительно возрастать. Таким образом, с помощью довольно малых сигналов на обмотке управления можно управлять большими мощностями.
В самом простом случае такой прибор, как магнитный усилитель, представляет собой индуктивность, которая управляется постоянным током. Для соответствующего управления индуктивность должна быть подключена последовательно к нагрузке в цепи переменного тока.

При больших значениях индуктивности значение тока в последовательной цепи и нагрузке небольшое. При малой индуктивности в последовательной цепи ток будет большой. На нагрузке, соответственно, его значение также будет возрастать пропорционально к уменьшению индуктивности. Существуют многочисленные разработки, в которых такой прибор, как магнитный усилитель, используют как, например, бесконтактное реле ( для осуществления бесконтактного переключения тока), для двоения значения частоты, для стабилизации напряжения в цепи, для модуляции высокочастотных сигналов низкочастотными сигналами, в качестве такого устройства, как усилитель тока, для регулирования напряжением питания и прочее.
Хотя в последнее время магнитные усилители были в некоторых сферах своего применения потеснены полупроводниковыми аппаратами, в таких областях, как управление электроприводами в строительной технике, регулировании освещением концертных залов и кинотеатров, в управлении тепловозами магнитный усилитель не имеет конкурентов и по сей день.
fb.ru
Магнитный усилитель | Сфера применения, характеристики, принцип работы, схемы и формулы расчетов – на промышленном портале Myfta.Ru
 Магнитный усилитель мощности представляет собой статический прибор, назначение которого, используя слабый постоянный ток, менять величину переменного тока. На практике это находит применение в управлении силовым электроприводом разнообразных механизмов, в том числе в строительной технике, на транспорте, в горной и металлургической промышленности. Также их используют при создании бытовых стабилизаторов переменного тока, в конструкциях регуляторов освещения киноконцертных залов. Диапазон их использования очень широкий.
Магнитный усилитель мощности представляет собой статический прибор, назначение которого, используя слабый постоянный ток, менять величину переменного тока. На практике это находит применение в управлении силовым электроприводом разнообразных механизмов, в том числе в строительной технике, на транспорте, в горной и металлургической промышленности. Также их используют при создании бытовых стабилизаторов переменного тока, в конструкциях регуляторов освещения киноконцертных залов. Диапазон их использования очень широкий.
представляет собой статический прибор, назначение которого, используя слабый постоянный ток, менять величину переменного тока. На практике это находит применение в управлении силовым электроприводом разнообразных механизмов, в том числе в строительной технике, на транспорте, в горной и металлургической промышленности. Также их используют при создании бытовых стабилизаторов переменного тока, в конструкциях регуляторов освещения киноконцертных залов. Диапазон их использования очень широкий.
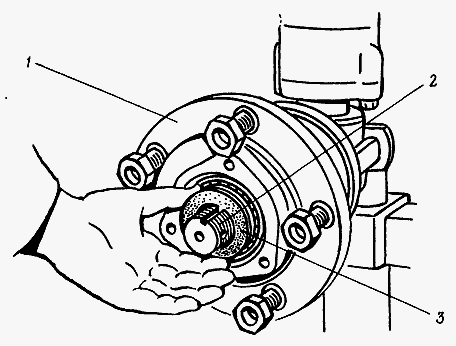
Вот один из образцов таких приборов, ТУМ-В1-24-14У3 , что означает Тороидальный Усилитель Магнитный, (В) — ?, 1 го габарита. Цифрами далее определяется количество и типы рабочих обмоток и обмоток управления.

Принцип работы магнитного усилителя построен на нелинейности характеристик при намагничивании магнитопровода. В конструкции магнитных усилителей предусмотрено три стержня, где на крайних находятся, в качестве рабочей обмотки, две катушки последовательно соединены между собой, а на средний стержень насажена обмотка управления, имеющая гораздо большее количество витков по сравнению с рабочей обмоткой.
При отсутствии подачи тока на обмотку управления, при том, что рабочая обмотка, соединенная последовательно с нагрузкой, находится под переменным напряжением, магнитопровод не насыщается, а напряжение падает за счет реактивного сопротивления рабочих обмоток. Нагрузка в этом случае дополнительной мощности не получает.
В случае подачи на обмотку управления ток, даже небольшой силы, в следствии большого количества витков обмотки управления в магнитопроводе возникает насыщение. Это ведет к резкому уменьшению реактивного сопротивления рабочей обмотки и увеличению силы тока в рабочей цепи. Так, посылая малые сигналы в обмотку управления, можно контролировать значительные величины мощности в рабочей цепи, в которой находится магнитный усилитель мощности.
Получив широкое признание по применению в самых разных отраслях науки и техники, магнитные усилители имеют самые разные модификации схем и конструкции, отличающиеся по видам нагрузочных характеристик, способам выполнения обратной связи, количеством и формой сердечников, видам усиливаемых сигналов, системам смещения, режимам работы. Выбирать тип магнитного усилителя необходимо так, чтобы он обладал требуемыми коэффициентами усиления, частотами усиливаемых колебаний, соответствовал области применения.
Поле применения магнитных усилителей очень широкое, они применяются — от точных измерительных приборов до устройств, с помощью которых автоматически управляют мощными производственными механизмами, такими как прокатные станы, экскаваторы и т.п. Такому широкому применению магнитные усилители обязаны целому ряду преимуществ, к ним относятся длительный срок службы, высокая надежность, простота обслуживания, значительный коэффициент усиления.
Они отличаются:
- низким порогом чувствительности к сигналам постоянного тока,
- широким диапазоном усиления мощности,
- постоянной готовностью к работе,
- возможностью суммирования на входе нескольких управляющих сигналов,
- значительной способностью выдерживать перегрузки,
- пожаро- и взрывобезопасностью.
Магнитные усилители отличаются стабильностью характеристик во время эксплуатации.
Простейшую схему магнитного усилителя можно рассматривать в следующем виде:
~ U — напряжение переменного тока;
Rн — нагрузка;
W1 — количество первичных обмоток;
W2 — количество вторичных обмоток;
МС — ферромагнитные сердечники;
= U — напряжение постоянного тока;
i1 — сила тока на выходе из первичной обмотки;
i2 — сила тока на входе во вторичную обмотку (усиливаемый сигнал).

Здесь видно, что у простейшего магнитного усилителя имеется два замкнутых магнитопроводов, первичные обмотки на них W1 включены последовательно и находятся под переменным напряжением. Вторичные обмотки W2 тоже последовательно подключены, но навстречу друг другу, когда обмотки W2 замкнуты на небольшое сопротивление, то это не вызывает изменений силы тока i1 в первичных обмотках. Но когда на обмотки W2 подается постоянный ток, то нелинейный характер кривой намагничивания сердечников ведет к уменьшению динамической магнитной проницаемости с уменьшением индуктивности L1 на первичных обмотках с возрастанием тока в обмотках.
Устройство, изготовленное по схеме, изображенной выше (без сопротивления нагрузки RH), носит название — управляемый дроссель. Но его можно превратить в дроссельный магнитный усилитель, если последовательно к его обмоткам W1 подключить нагрузку RH, а на обмотку W2 вместо слабого постоянного тока подать сигнал постоянного либо усиливаемого, либо медленно уменьшаемого тока i2.
Коэффициент усиления по току Ki и коэффициент увеличения мощности Кр при расчете простейших магнитных усилителей определяются по формулам:

где Ry — сопротивление в обмотках W2, Δi1ср — прирост тока нагрузки, соответствующий приросту тока при сигнале Δi2, n1 и n2 — количество витков в первичных и вторичных обмотках.
Наряду с коэффициентом усиления по току магнитный усилитель характеризуют следующие параметры: коэффициент кратности тока, постоянная времени, добротность. Также учитываются показатели чувствительности, максимальной мощности в нагрузке, КПД рабочей цепи.
Так же к параметрам, характеризующим магнитный усилитель, относится коэффициент зависимости действующей или средней величины тока под нагрузкой от тока в цепи управления: Iн =f ( Iу)
Обозначим ток на холостом ходу усилителя Iо, а ток при максимальной нагрузке — I к. Допустим, что перед нами идеальный усилитель, тогда отсутствующий входной сигнал (I у = 0) приводит к нулевому показателю и выходного сигнала (I н = 0). Но на практике в цепях имеются погрешности. Поэтому, чтобы определить их роль в работе усилителя, введен коэффициент отношения величины максимального тока к величине тока холостого хода и дали ему название коэффициент кратности тока К = Iк / Iо. Этот параметр один из важных характеристик магнитного усилителя, чем выше этот коэффициент, тем качественнее усилитель.
Т — постоянная времени, ею характеризуется быстродействие усилителя, она определяется как отношение индуктивности к активному сопротивлению обмотки управления
Т= Ly/ R
Добротность — это универсальный параметр, он определяется с учитом коэффициентов усиления и быстродействия:
D = kP/T.
Расчет магнитных усилителей проводится по всем этим показателям
myfta.ru
Магнитные усилители
Магнитным усилителем называют электромагнитный аппарат, служащий для плавного регулирования переменного тока, поступающего к нагрузке, путем изменения индуктивного сопротивления. Принцип действия магнитного усилителя основан на изменении индуктивности катушки с ферромагнитным сердечником при подмагничивании ее постоянным током. С помощью такого аппарата можно регулировать большие токи посредством сравнительно слабых электрических сигналов. Магнитные усилители широко применяют на тепловозах для автоматического регулирования возбуждения главного генератора и на ЭПС для регулирования напряжения источника служебного тока при зарядке аккумуляторных батарей, в стабилизаторах напряжения и для других целей.
Магнитные усилители с насыщающимися реакторами. В таком магнитном усилителе используют два насыщающихся реактора L1 и L2 (рисунок 28, а).

Рисунок 28- Схемы магнитных усилителей с насыщающимися реакторами с выходом на переменном (а) и постоянном (б) токе
Каждый из них выполнен в виде катушкис ферромагнитным сердечником 3 и подмагни-чиваюшей обмоткой 2, по которой проходит постоянный ток (ток управления ).
Рабочие обмотки реакторов L1 и L2 включают согласованно, чтобы переменные ЭДС, индуцированные в них, складывались, а обмотки управления 2 включают встречно, чтобы ЭДС, индуцированные в них, были направлены навстречу друг другу и взаимно уничтожались.
Входом магнитного усилителя, на который подается управляющий сигнал, являются зажимы а и b обмоток управления обоих реакторов. Выходом усилителя служат точки с и d, к которым подключают нагрузку R. Если нагрузка питается переменным током, то она включается последовательно с рабочими обмотками реакторов L1 и L2. Такой магнитный усилитель называют усилителем с выходом на переменном токе. Если нагрузка R рассчитана на питание постоянным током, то ее включают через выпрямитель В (рисунок 28,б). Магнитный усилитель в этом случае называют усилителем с выходом на постоянном токе.
Источником питания магнитного усилителя служит сеть переменного тока или трансформатор, подключенный к питающей сети (когда напряжение питания отличается от напряжения сети).
Магнитный усилитель обладает способностью усиливать электрические сигналы.
Магнитный усилитель работает следующим образом. Когда на вход усилителя не подается управляющий сигнал (напряжение на входе усилителя Uy и ток управления Iу равны нулю), сердечники реакторов не насыщены и рабочие обмотки имеют большое индуктивное сопротивление. Поэтому ток в цепи нагрузки будет мал. Его называют начальным, или током холостого хода усилителя. Напряжение на нагрузке U (выходное напряжение) будет также мало, так как большая часть напряжения питания теряется в виде падения напряжения, в рабочих обмотках. Следовательно, будет мала и мощность, поступающая к нагрузке от источника питания.
При подаче в обмотки управления 2 тока управления Iу сердечники реакторов подмагничиваются и индуктивное сопротивление XL рабочих обмоток уменьшается. При этом растут ток в цепи нагрузки и поступающая к ней мощность.
Магнитный усилитель, выполненный по схемам рисунок 28, имеет симметричную характеристику управления, т. е. одинаково реагирует на то или иное направление тока управления. В ряде случаев требуется, чтобы ток нагрузки изменялся различным образом в зависимости от полярности сигнала управления. Для этой цели в усилителе создают некоторое начальное подмагничивание при помощи специальной обмотки, обтекаемой постоянным током. Она называется обмоткой смещения и располагается на сердечнике так же, как и обмотка управления (при наличии нескольких обмоток управления одну из них обычно используют в качестве обмотки смещения).
Вопросы для самоконтроля:
1. Что такое реактор?
2. Как применяются индуктивные шунты?
3. Зачем нужны токоограничивающие реакторы?
4. Что такое дроссели напряжения и как их используют?
5. Что называется трансформатором, и каков принцип работы трансформатора?
6. Как устроен трансформатор?
7. Что такое коэффициент трансформации трансформатора?
8. Как классифицируются трансформаторы?
Похожие статьи:
poznayka.org
2.5.5 Достоинства и недостатки магнитных усилителей.
Магнитные усилители обладают рядом достоинств.
Они просты по устройству, надежны в работе и имеют большой срок службы. Этим объясняется широкое использование магнитных усилителей в авиационном оборудовании.
Магнитные усилители по сравнению с усилителями других принципов действия обладают достаточно высоким коэффициентом усиления сигнала по мощности. Выполнение сердечника из пермаллоя обеспечивает высокую чувствительность магнитных усилителей, способных реагировать на входные сигналы очень малой мощности.
Магнитные усилители способны реагировать на несколько входных сигналов, действующих одновременно на намагниченность сердечника. При этом выходной сигнал будет зависеть от алгебраической суммы сигналов на входе. Поэтому магнитные усилители находят применение в качестве суммирующих устройств. Такая необходимость встречается в системах автоматического регулирования, у которых регулирующее действие создается несколькими командными сигналами от различных датчиков (например, в автопилотах со связанным регулированием по каналам курса, крена и тангажа).
Существенным недостатком магнитных усилителей является их инерционность, постоянная времени их может достигать десятых долей секунды.
3. Виды регуляторов напряжения.
3.5. Транзисторные регуляторы напряжения
Все современные полупроводниковые регуляторы напряжения – регуляторы дискретного действия. Аналогом бесконтактных регуляторов напряжения дискретного действия были широко распространены до и во время Великой Отечественной войны так называемые вибрационные регуляторы напряжения, в которых в качестве импульсного элемента использовались электромагнитные реле. Исследование рабочих процессов в так их регуляторах было проведено В. С. Кулебакиным в 1942 г.
Рис. 3.1.1. Принципиальные схемы выходного каскада полупроводникового регулятора напряжения:
а – с добавочным сопротивлением; б – без добавочного сопротивления
Увеличение мощности генераторов привело к тому, что мощность цепи возбуждения, которую необходимо прерывать, превысила допустимую разрывную мощность контактов реле (~ 150 В·А), и вибрационные регуляторы были заменены угольными регуляторами.
Появление полупроводниковых приборов, способных при работе в ключевом режиме коммутировать большие мощности, привело вновь к использованию дискретных регуляторов для регулирования напряжения авиационных генераторов. Во всех многочисленных схемах регуляторов напряжения на транзисторах принципиальная схема оконечного каскада имеет вид, представленный на рис. 3.1.1. Различия полных схем регуляторов связаны главным образом с различием схем управления импульсным элементом, роль которого выполняет транзистор VT1, включенный последовательно с обмоткой возбуждения и работающий в режиме ключа.
Когда транзистор работаете режиме отсечки или, как говорят, когда он находится в закрытом состоянии, можно считать, что сопротивление цепи эмиттер — коллектор весьма велико («ключ закрыт»). Если транзистор работает в режиме насыщения («ключ открыт»), то сопротивление весьма мало.
Диод VD1 включенный параллельно обмотке возбуждения, обеспечивает работу ее в режиме «непрерывного тока», т.е. протекание тока по обмотке возбуждения и в период разомкнутого состояния транзисторного ключа. В режиме «непрерывного тока» при одинаковом среднем значении тока за период наибольшее значение тока возбуждения меньше, чем в режиме «прерывистого тока», вследствие чего потери в транзисторе, пропорциональные квадрату прерываемого тока, существенно меньше. Кроме того, диод защищает транзистор VT1 от пробоя, так как при прерывании цепи возбуждения или при резком изменении напряжения на обмотке возбуждения возникает э.д.с. самоиндукции, приложенная к переходу эмиттер-коллектор транзистора. Если транзистор включен в цепь возбуждения, то при работе в режиме ключа на зажимах генератора устанавливается напряжение, имеющее пульсирующий характер (рис. 3.1.2).
Рис. 3.1.2. Форма пульсаций напряжения при импульсном регулировании:
а - нагруженный генератор: б - холостой ход
Для релейных регуляторов, напряжения амплитуда пульсаций определяется коэффициентом возврата релейного элемента и остается постоянной при всех режимах работы генератора. При этом, исходя из требований к качеству электрической энергии, амплитуду пульсаций напряжения генератора стремятся сделать как можно меньше. Если частота вращения генератора и его нагрузка изменяются в широком диапазоне, то при стабилизации напряжения относительное время открытого состояния транзистора приобретает два крайних значения: 0 и 1, при которых автоколебания в системе прекращаются, а частота замыканий транзисторного ключа становится равной нулю. При некотором значениичастота замыканий достигает максимума (рис. 3.1.3). С увеличением нагрузки генератора частота возрастает до определенного значения, а затем начинает постепенно убывать.
Для импульсных регуляторов напряжения частота замыкания постоянна. При этом в процессе поддержания среднего значения напряжения величина может приобретать два крайних значения: 0 и 1, при которых амплитуда пульсации тока возбуждения и напряжения генератора равна нулю. При переходе тока возбуждения от одного крайнего значения к другому амплитуда пульсаций будет постепенно нарастать и по достижении определенногомаксимума убывать.
При включении транзистора в цепь возбуждения без добавочного сопротивления (см. рис. 3.1.1, б) непрерывность протекания тока в обмотке возбуждения в период закрытого состояния транзистора обеспечивается включением параллельно обмотке возбуждения диода VD1. При отключении обмотки в ней наводится э.д.с. самоиндукции, и ток при закрытом ключе продолжает протекать по контуру. Режим непрерывного тока возможен только при условии, что постоянная времени обмотки возбуждения значительно больше периода квантования(периода замыканий транзисторного ключа).
Для выявления основных свойств импульсного метода управления рассмотрим квазистационарные процессы. Для интервала(рис. 3.1.4), в течение которого обмотка возбуждения подключена к источнику питания
Рис. 3.1.3. Зависимость частоты замыканий транзисторного ключа от τ0 для релейных регуляторов
Рис. 3.1.4. Изменение тока в цепи возбуждения в режиме непрерывного тока при широтно-импульсном регулировании
(допустим, что сопротивление импульсного элемента равно нулю), баланс напряжений и э.д.с. определяется уравнением
, (3.1)
где — сопротивление обмотки возбуждения; — индуктивность обмотки возбуждения.
Для интервала , в течение которого транзистор закрыт, и при условии, что, справедливо уравнение
. (3.2)
Среднее значение тока возбуждения за период можно получить, интегрируя уравнения (3.1) и (3.2):
, (3.3)
так как , а.
Т
Рис. 3.1.5. Транзисторный регулятор напряжения:
Ф — фильтр; С — схема выделения наибольшего напряжения; ГП — генератор пилы;
ЭС — эталонный сигнал; УМ ~ усилитель мощности; УР- устройство рекуперации;
КЗ — корректирующее звено
аким образом, регулировать напряжение можно, изменяя среднее значение тока возбуждения, воздействуя на скважность импульсов. В качестве примера на рис. 3.1.5 приведен транзисторный широтно-импульсный регулятор напряжения, поддерживающий в симметричных режимах среднее фазное напряжение и ограничивающий наибольшее из фазных напряжений в несимметричных режимах работы трехфазного генератора. Наибольший из этих четырех сигналов суммируется с пилообразным напряжением и поступает на вход компаратора, где сравнивается с опорным напряжением. Полученный широтно-модулированный сигнал поступает на базу силового транзистора, управляющего током возбуждения возбудителя. На рис. 3.13 показано изменение сигнала на выходе компаратора при повышении напряжения генератора.Опорное напряжение представляет собой сумму трех сигналов: собственно эталонного сигнала, сигнала с распределителя реактивной мощности (при параллельной работе) и сигнала гибкой обратной связи, обеспечивающей необходимое качество переходных процессов.
Рис. 3.1.6. Диаграмма работы регулятора напряжения:
1 — сумма и «пилы»; 2— эталон; 3 — выход регулятора
studfiles.net
2. Магнитные усилители
2.1. Дроссельный магнитный усилитель.
Для предварительного усиления сигналов постоянного тока с одновременным преобразованием их в пропорциональные сигналы переменного тока применяются магнитные усилители.
2.1.1. Принцип работы дроссельного магнитного усилителя.
Рассмотрим принцип работы магнитного усилителя па примере дроссельного магнитного усилителя, схема которого показана на рис. 2.1.1,а. На сердечнике кольцевой или прямоугольной формы из пермаллоя помещены две обмотки.
Одна из них—обмотка у выполняет роль управляющей обмотки. На нее подается входной сигнал ис, подлежащий усилению, следовательно, выводные зажимы управляющей обмотки являются входом усилителя.
Входной сигнал ис намагничивает сердечник усилителя и изменяет его магнитную проницаемость,
Другая обмотка р—рабочая. В ее цель включены источник питания с переменным напряжением и сопротивление нагрузки RН. В связи с этим рабочую обмотку иногда называют обмоткой переменного тока пли нагрузочной обмоткой. Выходной, усиленный по мощности сигнал переменного тока выделяется на сопротивлении нагрузки усилителя.
Очевидно, для того чтобы данная схема обладала усилительными свойствами, необходимо, чтобы постоянный ток, протекающий по управляющей обмотке, управлял переменным током в нагрузочной цепи, а следовательно, и напряжением на выходе схемы.
Рис. 2.1.1. Схема дроссельного магнитного усилителя (а) и его статистическая характеристика (б)
Такое управление основано на известных из электротехники зависимостях:
L- индуктивность рабочей обмотки;
Р- число витков рабочей обмотки;
SМ-площадь сечения магнитной цени;
lср-средняя длина магнитной це;пи;
а-абсолютная магнитная проницаемость магнитоировода
xL—индуктивное сопротивление рабочей обмотки;
f—частота питающего напряжений.
С изменением небольшого по мощности сигнала на входе усилителя меняются намагниченность сердечника и его магнитная проницаемость, что
приводит к изменению индуктивности и индуктивного сопротивления рабочей обмотки. В этом заключается принцип работы усилителя- Физически это объясняется тем, что с изменением магнитной проницаемости изменяются магнитное сопротивление
магнитный поток рабочей обмотки Фр н индуктируемая этим потоком э.д.с. самоиндукции еL , которая и определяет индуктивное сопротивление рабочей обмотки.
Рассмотрим работу усилителя более подробно.
Первый случай: входной сигнал не подается (ис=0). Сердечник при этом размагничен и имеет наибольшую магнитную проницаемость. Индуктивность и индуктивное сопротивление рабочей обмотки также максимальны, поэтому по сопротивлению нагрузки протекает минимальный ток, называемый начальным. На выходе усилителя создается минимальное напряжение.
Второй случай: ис >0 (полярность показана на схеме). При этом ток и магнитный поток в управляющий обмотке увеличатся, сердечник намагнитится и его магнитная проницаемость уменьшится, что приведет к увеличению магнитного сопротивления магнитной цепи. Следовательно, уменьшатся магнитный поток ФР, э, д. с. самоиндукции еL и индуктивное сопротивление xL рабочей обмотки. При этом возрастут ток в рабочей цепи Iн
и напряжение выхода ивых.
Физические процессы, происходящие в дроссельном магнитном усилителе при увеличении входного сигнала, можно представить в виде цепочки изменения физических величин:
Третий случай: ис <0 (изменилась полярность сигнала). В этом случае физические процессы будут протекать аналогично второму случаю, только изменения физических величин будут обратными. Покажем это в виде цепочки, но уже через математическую связь величин:
studfiles.net
МАГНИТНЫЕ УСИЛИТЕЛИ, ИХ НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ - Магнитные усилители, их назначение и классификация
приобрестиМагнитные усилители, их назначение и классификацияскачать (136.4 kb.)Доступные файлы (1):n1.doc
МАГНИТНЫЕ УСИЛИТЕЛИ, ИХ НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯИзмерительные устройства систем автоматического регулирования обычно вырабатывают маломощные сигналы управления, которые непосредственно не могут привести в действие исполнительные механизмы. Малая мощность сигналов объясняется стремлением уменьшить влияние нагрузки на точность измерений, а также конструктивными особенностями и физической природой измерительных устройств.
Чтобы получить мощность, необходимую для работы исполнительных устройств, применяют магнитные усилители. Они практически нечувствительны к вибрациям и механическим воздействиям, позволяют получить на выходе значительные токи, просты в эксплуатации, сравнительно недороги и очень надежны.
В зависимости от характера физических процессов, определяющих принцип работы магнитного усилителя, различают дроссельные и трансформаторные магнитные усилители.
В дроссельных усилителях рабочая обмотка (обмотка переменного тока) выполняет функцию дроссельной «заслонки», ограничивающей ток в нагрузке, включенной (обычно последовательно) в цепь рабочей обмотки.
В трансформаторных усилителях цепь нагрузки электрически не связана с цепью питания. Передача энергии из цепи питания в цепь нагрузки осуществляется за счет магнитной связи между ними. При этом, воздействуя на общий магнитный поток, сцепленный с витками обмоток цепей питания и нагрузки, можно менять мощность, передаваемую в цепь нагрузки.
Как дроссельные, так и трансформаторные усилители могут быть собраны по однотактной или двухтактной схеме. В однотактных магнитных усилителях фаза тока в нагрузке не зависит от полярности входного сигнала. В двухтактных магнитных усилителях фаза тока в нагрузке меняется на 180° при изменении полярности тока в обмотке управления.
В зависимости от типа обратной связи различают магнитные усилители с внешней обратной связью, у которых выпрямленный рабочий ток проходит по специальной обмотке обратной связи, и магнитные усилители с внутренней обратной связью, у которых постоянная составляющая рабочего тока проходит по той же рабочей обмотке (дополнительная обмотка отсутствует).
Двухтактный магнитный усилитель может быть собран по дифференциальной схеме с подмагничиванием и с обратной связью, а также по мостовой схеме.ПРИНЦИП ДЕЙСТВИЯ ДРОССЕЛЬНОГО МАГНИТНОГО УСИЛИТЕЛЯ
Ферромагнитный материал, из которого изготовляются магнитопроводы магнитных усилителей, можно представить состоящим из отдельных малых областей (доменов), самопроизвольно намагничивающихся в различных направлениях.
При наложении на магнитопровод магнитного поля обмотки эти намагниченные области («магнитики») ориентируются преимущественно вдоль силовых линий внешнего поля, в результате чего общий магнитный поток резко возрастает. При изменении полярности тока в обмотке «магнитики» поворачиваются и направление общего магнитного потока в магнитопроводе изменяется на обратное.
Будем называть магнитодвижущей силой (МДС) Aw произведение тока в обмотке на число ее витков. Эта величина пропорциональна току, так как число витков обмотки обычно постоянно.
На рис. 10.15 изображена полученная опытным путем зависимость магнитного потока в магнитопроводе от количества ампер-витков его обмоток. Это усредненная кривая, характерная для магнитомягких материалов.На рис. 10.16 изображен магнитопровод, на который намотаны две обмотки: рабочая wр, питаемая синусоидальным напряжением, и управляющая wу к которой подводится усиливаемое напряжение.
Предположим, что управляющая обмотка обесточена, а МДС рабочей обмотки изменяются по синусоидальному закону от +Awр до —Awр При этом магнитный поток в магнитопроводе изменяется на ДФ (см. рис. 10.15).
Предположим, что через управляющую обмотку проходит ток и ее МДС равна некоторому значению Awy. МДС рабочей обмотки изменяется в прежних пределах от +Awр до —Awp. При этом магнитный поток в магнитопроводе изменяется на Ф'. Из рис. 10.15 видно, что Ф' значительно меньше Ф.
Таким образом, в первом случае скорость изменения магнитного потока будет большой, во втором — незначительной. ЭДС самоиндукции рабочей обмотки, пропорциональная скорости изменения магнитного потока (закон электромагнитной индукции), в первом случае будет значительно больше, чем во втором. Эта ЭДС направлена навстречу приложенному напряжению и ограничивает ток в цепи. При постоянном действующем значении синусоидального напряжения питания в первом случае ток в рабочей обмотке будет меньше, чем во втором.
Изменяя магнитное состояние магнитопровода, можно менять ток в рабочей обмотке, а следовательно, и в нагрузке Zн, которая включена последовательно
С wp.
Пока магнитопровод не насыщен, основная часть напряжения питания тратится на преодоление ЭДС самоиндукции рабочей обмотки, падение напряжения на нагрузке невелико, ток в нагрузке мал. Когда магнитопровод переходит в насыщенное состояние, ЭДС самоиндукции рабочей обмотки практически исчезает и все напряжение питания оказывается приложенным к нагрузке. Ток в нагрузке возрастает.
На рис. 10.17 изображена зависимость тока в нагрузке (рабочего тока) IР от тока в обмотке управления Iу. Из рисунка видно, что с увеличением тока управления Iу, т. е. по мере насыщения магнитопровода и уменьшения ЭДС самоиндукции рабочей обмотки, увеличивается ток в нагрузке Iр. При этом небольшие изменения тока Iу вызывают значительные изменения рабочего тока. Следовательно, устройство работает как усилитель.
Следует отметить, что в действительности картина физических процессов несколько сложнее. В современных магнитных усилителях применяются магнитопроводы с прямоугольной кривой намагничивания. Они либо сразу размагничиваются, либо полностью насыщаются. Поэтому перераспределение напряжения питания между рабочей обмоткой и нагрузкой происходит в течение каждого периода. Например, в течение четверти каждого периода напряжение питания приложено к нагрузке, а в течение 3/4 периода гасится на рабочей обмотке (рис. 10.18).
Изменяя ток управления в обмотке wу, это распре деление можно изменить увеличив или уменьшив часть периода, в течение которой напряжение приложено к нагрузке, а следовательно, увеличив или уменьшив (в среднем) ток в нагрузке.
Дроссельный магнитный усилитель сравнительно прост как по устройству, так и по принципу работы, однако его применение в системах автоматического регулирования ограничено, так как ему присущ ряд недостатков. Прежде всего отметим существенную не линейность зависимости тока в нагрузке от тока управления (см. рис. 10.17). Так, при токе управления Iу = 0 ток нагрузке Этот нулевой ток I0 увеличивает погрешность регулирования и потери мощности. Другой недостаток дроссельного усилителя — сравнительно низкий коэффициент усиления. Кроме того, во многих случаях существенно и то, что дроссельный усилитель не реагирует на полярность сигнала управления. Эти недостатки устранены в более сложных схемах магнитных усилителей.
ПРИНЦИП ДЕЙСТВИЯ ТРАНСФОРМАТОРНОГО
МАГНИТНОГО усилителя
Схема трансформаторного магнитного усилителя изображена на рис. 10.19. Синусоидальное напряжение питания подводится к обмотке w1, а нагрузка Z„ вклинена в цепь специальной обмотки w2.
Пока сердечник не насыщен, синусоидальный ток, проходящий по обмотке w1, вызывает значительные изменения магнитного потока в магнитопроводе. Переменный магнитный поток, пронизывая витки об мотки W2, наводит в этой обмотке ЭДС, которая ис пользуется для питания нагрузки Zн. Чем больше скорость изменения магнитного потока, тем больше на веденная ЭДС и ток в нагрузке.
Когда происходит насыщение магнитопровода, скорость изменения магнитного потока резко уменьшается (см. § 10.6), ЭДС, индуцируемая во вторичной обмотке w2, становится небольшой, соответственно уменьшается и ток в нагрузке.
Рабочая характеристика трансформаторного магнитного усилителя (зависимость рабочего тока от тока управления) изображена на рис. 10.20. Видно, что с увеличением тока управления Iу ток в нагрузке IР уменьшается.
Нетрудно заметить, что рабочие характеристики дроссельного и трансформаторного усилителей являются как бы зеркальным отображением друг друга. Это объясняется тем, что ЭДС, индуцируемая в цепи нагрузки, в одном случае играет роль «заслонки», в другом — источника питания нагрузки.
ВЛИЯНИЕ ОБРАТНОЙ СВЯЗИ НА КОЭФФИЦИЕНТ УСИЛЕНИЯ МАГНИТНОГО УСИЛИТЕЛЯ
Для характеристики усилительных свойств вводят коэффициенты усиления по току kI по напряжению kUt по мощности kP. Коэффициентом усиления магнитного усилителя по току называют отношение изменения действующего значения рабочего тока к соответствующему изменению тока управления (полагаем Iн = IР):
kI = IР/Iу.
Аналогично,
ku = UP/y; kP = Pp/Py,
где Up — напряжение на нагрузке; Uy — управляющее напряжение; Рр — мощность, выделяемая в на грузке; Ру — мощность, потребляемая цепью управления.
Для магнитных усилителей справедливо (с достаточной степенью точности) следующее равенство:
Iрwр = Iуwу.
С учетом этого равенства выражение для коэффициента усиления по току можно представить в виде
kI =wy/wp.
Коэффициент усиления по току магнитных усилителей, собранных по схемам, изображенным ранее, составляет несколько десятков единиц.
Приведенные формулы показывают, что коэффициенты усиления магнитного усилителя теоретически не зависят, а практически очень мало зависят от колебаний напряжения, частоты источника питания и изменений сопротивления нагрузки.
Такая стабильность характеристик позволяет использовать в магнитном усилителе глубокую положительную обратную связь. Обратной связью называют подачу сигнала с выхода усилителя на его вход. В магнитных усилителях наибольшее распространение получила обратная связь по току (рис. 10.21).
Обмотка обратной связи w0Cнамотана на том же стержне, что и обмотка управления. Если магнитный поток обмотки обрат ной связи усиливает магнитный поток обмотки управления, то обратная связь называется положительной, в противном случае — отрицательной. Изменить характер обратной связи можно поменяв полярность управляющего напряжения.
При наличии положительной обратной связи уравнение магнитного усилителя принимает вид
Ipwp = IyWy+Ipwoc
Отношение koc = woc/wp называют коэффициентом обратной связи. При этом
Коэффициент усиления по току усилителя с обратной связью
kocI = /р//у =k1(1— koc).
Если koc1, т. е. число витков обмотки обратной связи приближается к числу витков рабочей обмотки, то коэффициент усиления усилителя с обратной связью увеличивается и стремится к бесконечности. Это значит, что бесконечно малым изменениям тока управления соответствуют конечные (скачкообразные) изменения рабочего тока.Обычно , так как при слишком большом коэффициенте усиления нарушается стабильность параметров усилителя. Кроме того, положительная обратная связь увеличивает рабочий ток при отсутствии тока в управляющей обмотке /о в 1/(1 — kос) paз,
Уже отмечалось, что при изменении полярности управляющего сигнала положительная обратная связь становится отрицательной. Вследствие этого характеристика усилителя с обратной связью приобретает несимметричную форму. Действительно, при отрицательной обратной связи уравнение магнитного усилителя и выражение для коэффициента усиления по току записываются в следующем виде:
Из рис. 10.22 видно, что коэффициент усиления по току можно представить как тангенс угла наклона линейного участка к оси абсцисс. При этом
Поскольку из последних выражений следует, что tga > tgb, то ясно, что правая ветвь характеристики магнитного усилителя идет круче, чем левая, как это и изображено на рисунке.
Отличительная особенность схемы магнитного усилителя с внешней обратной связью — наличие специальной обмотки обратной связи wос. В технике находят широкое применение усилители с внутренней положительной обратной связью, которые иногда называют усилителями с самонасыщением (рис. 10.23). Здесь функцию обмотки обратной связи выполняет сама рабочая обмотка, в которой с помощью выпрямительных диодов создается постоянная составляющая рабочего тока, магнитный поток которой совпадает по направлению с магнитным потоком управления и «помогает» ему изменять состояние магнитопровода.ДИФФЕРЕНЦИАЛЬНЫЙ МАГНИТНЫЙ УСИЛИТЕЛЬ С ОБМОТКАМИ СМЕЩЕНИЯ
Чтобы сделать магнитный усилитель чувствительным к полярности тока управления, вводят обмотку смещения wсм, с помощью которой создают постоянное начальное подмагничивание магнитопровода (рис. 10.24). К МДС управления добавляется постоянная величина — МДС смещения, при этом характеристика магнитного усилителя сдвигается влево. Рабочая характеристика усилителя с обмоткой смещения дана на рис. 10.25. Смещение можно менять с помощью резистора Rcм..
Если смещения нет, то при любой полярности тока управления магнитопровод намагничивается. При наличии тока в обмотке смещения магнитопровод изначально уже подмагничен, а ток управления в зависимости от полярности либо увеличивает, либо уменьшает намагниченность магнитопровода. Таким образом, при положительной полярности тока управления ток в рабочей обмотке увеличивается, а при отрицательной полярности уменьшается (в пределах линейного участка характеристики).
Обмотка смещения используется также для начального симметрирования сложных схем, включающих два (или более) магнитных усилителя. В этом случае регулировочный резистор RCM выводится на щит управления автоматической системой.
Для устранения отмеченных ранее недостатков магнитные усилители собирают по различным двухтактным схемам. Наиболее простой из усилителей — дифференциальный магнитный усилитель с обмотками смещения (рис. 10.26). Этот усилитель собран из двух трансформаторных усилителей, но можно использовать и два дроссельных магнитных усилителя.
Рассмотрим его работу.
В цепи нагрузки действуют две ЭДС, индуцируемые в обмотках W2- Эти ЭДС направлены навстречу друг другу. Если управляющий сигнал отсутствует (Uy = 0), то магнитное состояние магнитопроводов W2, полностью компенсируют друг друга. Результирующая ЭДС Е = Е1 — E2=0, ток в нагрузке отсутствует.
Если к управляющим обмоткам пoдведено положительное напряжение, то левый магнитопровод размагничивается, а правый переходит в более насыщенное состояние, ЭДС Е1 увеличивается, а ЭДС E2. уменьшается, результирующая ЭДС Е совпадает по фазе с Е1.
Если к управляющим обмоткам подвести отрицательное напряжение, то левый магнитопровод подмагничивается еще больше, правый размагничивается; ЭДС Е2> Е1и результирующая ЭДС Е совпадает по фазе с E2. Ток в нагрузке Z„ пропорционален результирующей ЭДС E. Зависимость тока Iн в нагрузке от тока управления Iу изображена на рис. 10.27.
ДИФФЕРЕНЦИАЛЬНЫЙ МАГНИТНЫЙ УСИЛИТЕЛЬ С ОБРАТНОЙ СВЯЗЬЮ
Схема (рис. 10. 28) состоит из двух одинаковых магнитных усилителей, каждый из которых снабжен обмоткой обратной связи, питаемой выпрямленным рабочим током. Управляющие обмотки намотаны так, что в одном усилителе обратная связь положительна, в другом — отрицательна. Регулировочные резисторы Rр обеспечивают начальную регулировку коэффициентов обратной связи. Схема собрана так, что в резисторе нагрузки ZH рабочие токи левого и правого однотактных усилителей направлены встречно.
На рис. 10.29 изображены нагрузочные характеристики левого I1(Iу) и правого I2(Iу) усилителей. Ток в нагрузке Iн рассматривается как алгебраическая сумма направленных встречно токов I1 и I2. (Нагрузочные характеристики усилителей с обратной связью были рассмотрены в § 10.8.)
При положительной полярности тока управления с увеличением Iу ток I1 резко возрастает (положительная обратная связь), ток I2 почти не изменяется (отрицательная обратная связь). Результирующий ток Iн = I1+I2 возрастает, совпадая по фазе с током I1.
При отрицательной полярности тока управления Iу характерp обратной связи меняется (положительная обратная
связь становится отрицательной, и, наоборот, отрицательная—положительной). При этом ток Iн близок по значению к току I2 и совпадает с ним по фазе.
Так как токи I1 и I2 сдвинуты по фазе на 180° относительно друг друга, то результирующий ток в нагрузке Iн меняет фазу на 180° при изменении полярности тока управления.
Из рис. 10.29 видно, что характеристика результирующего тока в нагрузкеIн(Iу) проходит через начало координат и линейна в широком диапазоне изменений Iу.
Коэффициент усиления по току рассмотренной дифференциальной схемы примерно равен коэффициенту усиления однотактных усилителей, составляющих схему, и достигает значений 104— 105 ввиду наличия положительной обратной связи.
МАГНИТНЫЙ УСИЛИТЕЛЬ, СОБРАННЫЙ ПО МОСТОВОЙ СХЕМЕ
Магнитный усилитель, собранный по мостовой схеме, изображен на рис. 10.30. Чтобы понять его работу, следует иметь в виду, что рабочие обмотки w1, w 2, w3, w4 соединены по мостовой схеме (рис. 10.31). В этом нетрудно убедиться, рассмотрев, какие элементы включены между точками а, b, с, d на рис. 10.30 и 10.31.
При отсутствии управляющего сигнала магнитное состояние магнитопроводов одинаково, сопротивления всех четырех рабочих обмоток одинаковы, мост уравновешен.
При положительной полярности управляющего напряжения левый магнитопровод размагничивается, правый — насыщается. При этом сопротивление обмоток w1 и w2 растет (вследствие увеличения ЭДС самоиндукции), а сопротивление обмоток w3 и w4 уменьшается.
Балансировка моста нарушается, и через нагрузку Zн проходит рабочий ток, который тем больше, чем больше различаются магнитные состояния левого и правого магнитопроводов, зависящие от управляющего тока.
При изменении полярности управляющего напряжения происходит насыщение левого и размагничивание правого магнитопроводов. Сопротивление обмоток w3, w4 станет больше, чем сопротивление обмоток w1, w2. Фаза рабочего тока изменится на 180°, а его значение будет увеличиваться по мере роста управляющего напряжения (тока).
Поскольку разбалансировка моста происходит вследствие согласованного изменения сопротивлений всех четырех плеч, коэффициент усиления усилителя, собранного по мостовой схеме, в четыре раза больше, чем дроссельного.
Рабочая характеристика магнитного усилителя, собранного по мостовой схеме, проходит через начало координат и линейна в широком диапазоне изменений сигнала управления (рис. 10.32). Питание любого магнитного усилителя осуществляется переменным током. Что касается нагрузки, то ею могут быть и потребители постоянного тока, включаемые через выпрямители. Последние обычно собираются на кристаллических диодах.
МАГНИТНЫЕ УСИЛИТЕЛИ, ИХ НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯnashaucheba.ru







423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)