 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Большая Энциклопедия Нефти и Газа. Эксцентриковый механизм
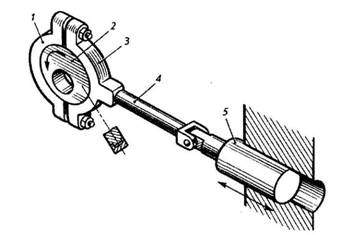
| Подобно кривошипно-ползунному работает эксцентриковый механизм, в котором роль кривошипа выполняет эксцентрик, укрепленный на ведущем валу. Цилиндрическая поверхность эксцентрика 2 (рис. 35) свободно охватывается хомутом 1 и бугелем 3, к которому прикреплен шатун 4, передающий во время вращения ведущего вала поступательное движение ползуну 5. В отличие от кривошипно-ползунного эксцентриковый механизм не может преобразовывать возвратно- поступательное движение ползуна во вращательное движение эксцентрика вследствие того, что между хомутом и эксцентриком, несмотря на наличие смазки, остается достаточное трение, чтобы препятствовать движению.
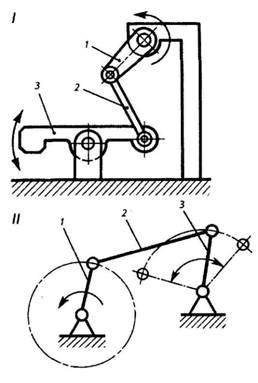
Рис. 35 По этой причине эксцентриковый механизм применяют только в тех машинах, где необходимо вращательное движение преобразовывать в возвратно-поступательное движение и создавать небольшой ход исполнительному органу при значительных силах. К таким машинам относятся штампы, прессы и др. Кривошипно-коромысловый механизм. Коромысло — звено рычажного механизма и представляет собой деталь в виде двуплечевого рычага, качающегося около средней неподвижной оси на стойке. На рис. 36 представлены конструктивная (I) и кинематическая (II) схемы такого механизма. Кривошип 1 может совершать вращательное движение. Кинематическая цепочка: кривошип 1, шатун 2 и коромысло 3, связанная шарнирными сочленениями, заставляет коромысло совершать качательные движения вокруг неподвижной оси на стойке.
Рис. 36 Применяют кривошипно-коромысловый механизм в рессорных подвесках паровозов, вагонов, в конструкциях машин для испытания материалов, весов, буровых станков и др. |
cherch.ru
Назначение, устройство, принцип работы эксцентрикового механизма — КиберПедия
Введение
Подобно кривошипно-ползунному работает эксцентриковый механизм, в котором роль кривошипа выполняет эксцентрик, укрепленный на ведущем валу. Цилиндрическая поверхность эксцентрика 2 (рис. 35) свободно охватывается хомутом 1 и бугелем 3, к которому прикреплен шатун 4, передающий во время вращения ведущего вала поступательное движение ползуну 5. В отличие от кривошипно-ползунного эксцентриковый механизм не может преобразовывать возвратно- поступательное движение ползуна во вращательное движение эксцентрика вследствие того, что между хомутом и эксцентриком, несмотря на наличие смазки, остается достаточное трение, чтобы препятствовать движению.
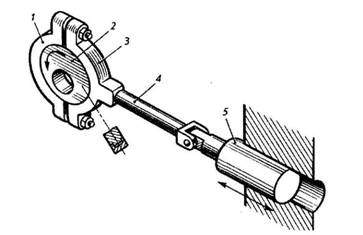
Рис. 35
По этой причине эксцентриковый механизм применяют только в тех машинах, где необходимо вращательное движение преобразовывать в возвратно-поступательное движение и создавать небольшой ход исполнительному органу при значительных силах. К таким машинам относятся штампы, прессы и др.
Кривошипно-коромысловый механизм. Коромысло — звено рычажного механизма и представляет собой деталь в виде двуплечевого рычага, качающегося около средней неподвижной оси на стойке. На рис. 36 представлены конструктивная (I) и кинематическая (II) схемы такого механизма. Кривошип 1 может совершать вращательное движение. Кинематическая цепочка: кривошип 1, шатун 2 и коромысло 3, связанная шарнирными сочленениями, заставляет коромысло совершать качательные движения вокруг неподвижной оси на стойке.
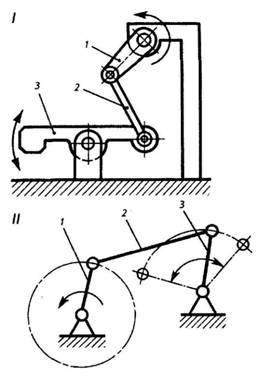
Рис. 36
Применяют кривошипно-коромысловый механизм в рессорных подвесках паровозов, вагонов, в конструкциях машин для испытания материалов, весов, буровых станков и др.
.
Технологическая часть
Маршрутная карта детали
а) Описание
Технологический процесс – это часть производственного процесса, содержащая действия по изменению и последующему определению состояния предмета производства. Технологический процесс непосредственно связан с изменением размеров, формы и свойств материала обрабатываемой заготовки, выполняемым в определенной последовательности. Чертеж детали «Вал-эксцентрик», которую необходимо получить в результате проведения технологического процесса, представлен на рисунке 4.1., а внешний вид детали – на рисунке 4.2.
Она представляет собой широко распространенную в машиностроении деталь типа ступенчатого вала. Анализ рабочего чертежа детали позволяет сделать следующие заключения:
· основными конструкторскими базами являются ось детали и торец, от которых заданы размеры;
·  в массовом и крупносерийном производстве заготовки получают методами штамповки или из круглого проката.
в массовом и крупносерийном производстве заготовки получают методами штамповки или из круглого проката.
Рис. 4.1.
Операция 005 – Заготовительная. Заготовку получаем прокатом.
Расчетная часть
Трудоемкость работы
Контроль
При выборе средств измерений в первую очередь должно учитываться допустимое значение погрешности для данного измерения, установленное в соответствующих нормативных документах.
В случае, если допустимая погрешность не предусмотрена в соответствующих нормативных документах, предельно допустимая погрешность измерения должна быть регламентирована в технической документации на изделие.
При выборе средств измерения должны также учитываться:
1. допустимые отклонения;
2. методы проведения измерений и способы контроля.
Главным критерием выбора средств измерений является соответствие средств измерения требованиям достоверности измерений, получения настоящих (действительных) значений измеряемых величин с заданной точностью при минимальных временных и материальных затратах.
Для оптимального выбора средств измерений необходимо обладать следующими исходными данными:
1. номинальным значением измеряемой величины;
2. величиной разности между максимальным и минимальным значением измеряемой величины, регламентируемой в нормативной документации;
3. сведениями об условиях проведения измерений.
Если необходимо выбрать измерительную систему,
руководствуясь критерием точности, то ее погрешность должна вычисляться как сумма погрешностей всех элементов системы (мер, измерительных приборов, измерительных преобразователей), в соответствии с установленным для каждой системы законом.
Предварительный выбор средств измерений производится в соответствии с критерием точности, а при окончательном выборе средств измерений должны учитываться следующие требования:
1. к рабочей области значений величин, оказывающих влияние на процесс измерения;
2. к габаритам средства измерений;
3. к массе средства измерений;
4. к конструкции средства измерений.
При выборе средств измерений необходимо учитывать предпочтительность стандартизированных средств измерений.
Точение производится на токарно-винторезном станке 16К20
Вес заготовки 3.55 кг. Материл резца Т15К6

где Тшт – штучное время
То – основное время
Тв – вспомогательное время
Тобс – время обслуживания
Тотд – время отдыха, личные надобности
Торг – организационное время
То – 1,48 мин
Tв1 = 0,08 мин (установить, снять деталь)
Тв2 = 0,05 мин (очистка резца от стружки щеткой)
Тв3 = 0,08 мин (закрепить резец в резцедержатель )
Тв4 = 0,02 мин (включить и выключить движение суппорта )
Тв5 = 0,01 мин (подвести или отвести инструмент к детали при обработке)
Тв6 = 0,08 мин (подвод и отвод резца)
Тв7 = 0,12 мин (измерение штангельциркуль) Тв=0,08+0,05+0,08+0,02+0,01+0,08+0,12=0,44мин
Топ - оперативное время,
Топ. = То +Тв = 0,29+0,44=1,13 мин
Торг = 4% от То =0,04 · 0,29=0,0116 мин
Tотд - перерыв,
Тотд = 5% от То = 0,05 · 0,29=0,0145 мин
Тобс =3% от То =0,03·0,29=0,0087 мин
Тшт= 0,44 +0,29+ 0,0087+0,0145+0,0116= 1,165 мин
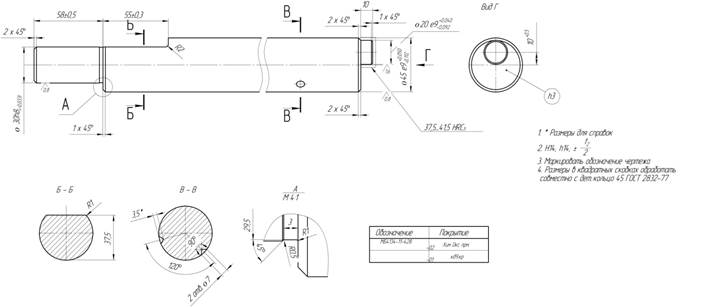
Приспособление представляет собой эксцентриковую втулку диаметром 78f9 мм, изготовленную из инструментальной стали У8 ГОСТ 1435-74. Во втулке имеется 3 паза (для легкой посадки втулки на вал) шириной 3 мм и длинной 100мм, на конце каждого паза отверстие диаметром 5мм (для снятия напряжений). Так же имеется внутренняя фаска 3×15⁰. Имеется две фаски 4×45⁰. Профрезерованна лыска под углом 30⁰, шероховатость 1,25, посредине размерами 0,5×8 гравируется и заливается черным лаком риска. Необходимо соблюдение параллельности оси втулки относительно оси вала с отклонениями 0,05. Глубина риски составляет 0,1 мм.
1.Определяем осевую силу.
По таблице 22 стр. 273 определяем значения коэффициентов и показатели
степеней.
 = 300
= 300
 = 1
= 1
 = 0,75
= 0,75

 Н
Н
К = К0 * К1 * К2 * К3 * К4 * К5
Где К0 = 1,5 – гарантированный коэффициент запаса для всех приспособлений;
К1 = 1,2 – коэффициент учитывающий состояние поверхности заготовки
для необрабатываемой заготовки;
К2 = 1 – коэффициент учитывающий влияние сил резания от
прогрессирующего затупления инструмента;
К3 = 1 – коэффициент учитывающий увеличение силы резания при
прерывистом резании;
К4 = 1,3 – коэффициент учитывающий постоянство силы зажима
развиваемый приводам приспособления; для ручного привода с удобным
расположением рукоятки;
К5 = 1 - коэффициент учитывающий установку деталей на планке с
большой поверхностью контакта.
К = 1,5 * 1,2 * 1 * 1 * 1,3 * 1 = 2,34
2. Определяем усилие зажима.

W= 1550*2,34=3627H
3. Определяем крутящий момент.
 - крутящий момент.
- крутящий момент.
Определяем крутящий момент:
где:  = 200 Н
= 200 Н
 = 0,28 М
= 0,28 М

4. Определяем действительное усилие зажима.



6. Определяем продольную силу
 Н
Н
7. Найдем силу трения, которая возникает между стенками втулки и валом.


 - коэффициент трения сталь о сталь, = 1,4
- коэффициент трения сталь о сталь, = 1,4
Т = 1,4*708=991,2Н
Список литературы:
1. Конструирование узлов и деталей машин: Учеб. пособие для студ. техн. спец. вузов/П.Ф. Дунаев, О.П. Леликов. – 4-е изд., перераб. и доп. – М.: «Высшая школа», 1985. – 420 с.
2. Горбацевич А.Ф. - Курсовое проектирование по технологии машиностроения.(Изд. 3е) 1975
3. Косилова А.Г., Мещеряков Р.К. "Справочник технолога-машиностроителя" в 2-х томах. Том 2 (1986)
4. Приспособления для металлорежущих станков Автор: Ансеров М.А. Издательство: Машиностроение Год: 1975
Введение
Подобно кривошипно-ползунному работает эксцентриковый механизм, в котором роль кривошипа выполняет эксцентрик, укрепленный на ведущем валу. Цилиндрическая поверхность эксцентрика 2 (рис. 35) свободно охватывается хомутом 1 и бугелем 3, к которому прикреплен шатун 4, передающий во время вращения ведущего вала поступательное движение ползуну 5. В отличие от кривошипно-ползунного эксцентриковый механизм не может преобразовывать возвратно- поступательное движение ползуна во вращательное движение эксцентрика вследствие того, что между хомутом и эксцентриком, несмотря на наличие смазки, остается достаточное трение, чтобы препятствовать движению.
Рис. 35
По этой причине эксцентриковый механизм применяют только в тех машинах, где необходимо вращательное движение преобразовывать в возвратно-поступательное движение и создавать небольшой ход исполнительному органу при значительных силах. К таким машинам относятся штампы, прессы и др.
Кривошипно-коромысловый механизм. Коромысло — звено рычажного механизма и представляет собой деталь в виде двуплечевого рычага, качающегося около средней неподвижной оси на стойке. На рис. 36 представлены конструктивная (I) и кинематическая (II) схемы такого механизма. Кривошип 1 может совершать вращательное движение. Кинематическая цепочка: кривошип 1, шатун 2 и коромысло 3, связанная шарнирными сочленениями, заставляет коромысло совершать качательные движения вокруг неподвижной оси на стойке.
Рис. 36
Применяют кривошипно-коромысловый механизм в рессорных подвесках паровозов, вагонов, в конструкциях машин для испытания материалов, весов, буровых станков и др.
.
Технологическая часть
Назначение, устройство, принцип работы эксцентрикового механизма
Изобретение относится к машиностроению, а именно к механизмам, преобразующим вращательное движение в возвратно-поступательное или колебательное. Эксцентриковый механизм для преобразования вращательного движения в возвратно-поступательное или колебательное содержит стойку, ведущий вал, шатун, ведомое звено и эксцентриковый подшипник с телами качения разного диаметра. Наружное кольцо указанного подшипника жестко соединено с шатуном, а внутреннее - с ведущим валом. Причем наружное и внутреннее кольца, а также тела качения снабжены зубчатыми венцами, находящимися в зацеплении. Внутреннее кольцо подшипника закреплено на ведущем валу эксцентрично.
Эксцентрик представляет собой два соединённых жёстко вала со смещёнными осями (либо вал с нецентральным отверстием). Один из валов (либо ось) вставляется в кольцо на опоре, на второй (рабочий) вал надевается кольцо, воспринимающее результирующее движение. По своей сути это кривошип очень маленького размера, и иногда эксцентрик используется именно в таком качестве, например, для создания вибраций.
Однако чаще всего такая конструкция используется для регулировки: подвод опор колодок барабанных тормозов, регулировка натяжения приводных ремней на двигателях, согласование входов водопроводного смесителя и выходов на стене и т. п.
Эксцентрик сам по себе выполнен как в предыдущем пункте, однако результирующее движение воспринимается в одной или в двух противоположных точках плоскостью (торцом) поступательного либо качающегося звена — толкателя. По своей сути это (простейший) вариант кулачкового механизма, создающий гармоничное движение, при котором перемещения толкателя пропорциональны косинусу (или синусу) угла поворота эксцентрика. Чаще всего применяется для привода поршней или мембран маломощных насосов (топливные насосы двигателей), а также для небольшого поступательного перемещения, например, преобразования вращательного движения ручки замка́ в возвратно-поступательное движение засова-защёлки.
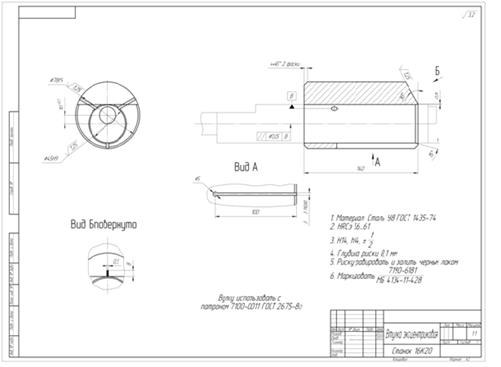
Вал – эксцентрик представляет собой сборочную единицу, входящую в состав устройства для удержания бабы в верхнем положении.
Устройство для удержания бабы в верхнем положении обеспечивает безопасность при выполнении ремонтных и наладочных работ.
Принцип работы устройства следующий: на режиме "Держание бабы на весу" рукоятка Р переводится влево на 180°.
Упор С, вмонтированный в буксе бабы, концом входит под нижний торец бабы. Одновременно толкатель Т нажимает на конечный выключатель В и цепь пуска электродвигателя разрывается. Средний (атмосферный) кран при этом необходимо оставить в положении "Закрыт".
Вновь молот может быть включен только при возврате рукоятки Р в первоначальное положение поворотом на 180°вправо. Баба под действием собственного веса опустится на нижний боек. Самопроизвольное смещение рукоятки из крайних положений предупреждается шариковым фиксатором К.
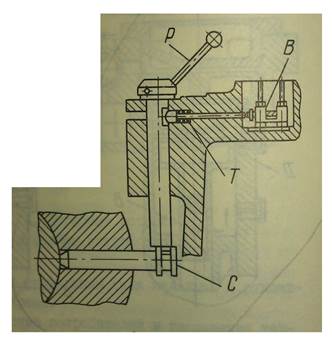 |
Рис.1
Вал эксцентрика является телом вращения, имеет три ступени:
1 ступень диаметром 30h8 мм является базовой для установки рукоятки
2 ступень диаметром 45e9 имеет лыску длиной 55 мм для упора толкателя
3 ступень диаметром 20е9 для сопряжения упора С, вмонтированного в буксе бабы.
На валу предусмотрено два отверстия расположенных под углом друг относительно друга 120°, для лучшей смазки.
cyberpedia.su
Эксцентриковый механизм - Большая Энциклопедия Нефти и Газа, статья, страница 1
Эксцентриковый механизм
Cтраница 1
Эксцентриковый механизм заменяет кривошипно-шатунный при малой длине хода. Движение хомута передается дальнейшим частям механизма эксцентриковой тягой. [1]
Эксцентриковый механизм для прижатия диска а фрикционной муфты, в котором используется схема включения по фиг. [2]
Эксцентриковый механизм заменяет кривошипно-шатунный при малой длине хода. Движение хомута передается дальнейшим частям механизма эксцентриковой тягой. [3]
Эксцентриковый механизм состоит из электродвигателя с редуктором, вращающего кулачок 6, который через систему рычагов 7 постепенно перемещает отдельные участки нижней полуформы. [4]
Эксцентриковый механизм состоит из эксцентрика 1, насаженного на вал редуктора, и корпуса 2, в пазах которого перемещается эксцентрик. [5]
Эксцентриковый механизм монтируется на вертикальной и горизонтальной частях станины. [7]
Эксцентриковый механизм служит для преобразования вращательного движения в возвратно-поступательное. [8]
Эксцентриковый механизм обычно используют, когда нужно создать большие давления при малом ходе ползуна. [9]
Эксцентриковый механизм представляет собой разновидность кривошипно-шатунного механизма с небольшим радиусом кривошипа - R, называемым эксцентриситетом. [10]
Эксцентриковый механизм для аррети-ровання весов: / - круглый эксцентрик; 2-стержень; 3-стойка. [11]
Эксцентриковые механизмы находят также широкое применение для авто матизации рабочих операций и движений в станках и автоматах. [12]
Эксцентриковый механизм монтируется на вертикальной и горизонтальной частях станины. Он состоит из вала, большой шестерни, конической шестерни, двух эксцентриков, двух шатунов, двух муфт, двух колонок ( штанг), траверсы и восьми подшипников. [14]
Эксцентриковый механизм для аррети-рования весов: / - круглый эксцентрик; 2 -стержень; 3-стойка. [15]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Механизм двигателя ткани - Швейная машина - Элементы машиноведения (VIII класс)
Механизм двигателя ткани состоит из трех узлов: узла горизонтального перемещения, узла вертикального перемещения и узла лапки.
Механизм двигателя ткани

А — эксцентриковый механизм, Б — кулачковый механизм,
а — механизм двигателя ткани, б — кинематическая схема механизма:
- главный вал,
- эксцентрик,
- регулятор строчки,
- шатун-вилка,
- коромысло,
- винт,
- качающийся валик,
- кулачок,
- вилка,
- вал подъема,
- коромысло,
- ролик,
- вилка рычага,
- зубчатая рейка,
- вал продвижения.
В узле горизонтального перемещения используется эксцентриковый механизм (на рисунке выше положение — а), который служит для преобразования вращательного движения в возвратно-поступательное или колебательное. Основным звеном данного механизма является эксцентрик — круглый диск, ось вращения которого не совпадает с его геометрической осью.
На рисунке ниже показана общая схема эксцентрикового механизма.
Общая схема эксцентрикового механизма

- главный вал,
- эксцентрик,
- головка шатуна,
- шатун,
- ползун,
- направляющие.
При вращении главного вала наиболее утолщенный участок эксцентрика будет перемещаться по окружности по движению часовой стрелки. На рисунке он Обращен вниз (I), влево (II), вверх (III) и вправо (IV). Как видно, схема движения эксцентрика сходна со схемой движения кривошипа и его пальца.
Шатун 4 и его головка 3, надетая на эксцентрик 2, совершает колебательные движения. Ползун 5 совершает прямолинейные движения вверх и вниз по направляющим 6.
В швейной машине к узлу горизонтального перемещения относится вал продвижения 15.
Смотрите рисунок — Механизм двигателя ткани
Коромысло вала 11, соединенное с нижней головкой шатуна-вилки 4, получает движение от главного вала через эксцентрик 2. При вращении главного вала шатунвилка совершает колебательное движение.
Шатун поднимается, и вместе с ним поднимается коромысло 5, поворачивая вал продвижения против часовой стрелки. Рычаг 13, закрепленный на левом конце вала, отклоняется вместе с валом и продвигает зубчатую вилку от работающего. Продольное перемещение рейки 14 регулируется с помощью рычага регулятора строки 3, который соединен с шатуном через шарнирный винт и одетый на него ползун. Ползун, в свою очередь, вставлен в паз рычага регулятора строчки. Опуская или поднимая рычаг, мы изменяем величину поворота шатуна, что приводит к большому повороту вала продвижения, т. е. увеличивается продольное перемещение рейки и, следовательно, длина стежка.
Эксцентриковый механизм
Эксцентриковый механизм состоит из эксцентрика, шатуна-вилки и коромысла.
Эксцентрик жестко закреплен на валу и совершает вращательное движение, является ведущим звеном. Шатун-вилка (как и в кривошипно-шатунном механизме) совершает колебательные движения, соединение эксцентрика с шатуном и шатуна с коромыслом — подвижное. Коромысло жестко закреплено на валу продвижения и совершает колебательные движения, является ведомым звеном.
В узле вертикального перемещения применен кулачковый механизм, который служит для преобразования вращательного движения в сложное повторяющееся, совершающееся по определенному замкнутому циклу. Основной деталью данного механизма является кулачок (различают кулачки плоские (дисковые) и цилиндрические).
Смотрите рисунок — Механизм двигателя ткани (положение – б)
При колебательных движениях качающегося валика 7 кулачок 8 нажимает на рожки вилки 9, которые его охватывают. Вилка поворачивается вместе с валом подъема 10, поднимающим коромысло), на конце которого находится ролик 12, вставленный в вилку рычага двигателя ткани 13. При подъеме рычаг давит на верхний рожок вилки и поднимает его вместе с рейкой.
Вал подъема получает движение от главного вала и качающегося валика, который, в свою очередь, получает движение от коленчатого вала через шатун. Его конструкция позволяет регулировать высоту подъема рейки в зависимости от толщины стачиваемых тканей.
«Обслуживающий труд», С.И.Столярова, Л.В.Домненкова

Все машины, независимо от своего устройства, состоят из отдельных узлов и деталей. При ознакомлении с устройством, принципом действия механизмов швейной машины применяют кинематические схемы. Условные обозначения деталей швейной машины, передач и соединений определяются ГОСТом 3462 — 62 и ГОСТом 2.770 — 68.Смотрите таблицу — Условные обозначения деталей швейной машины Смотрите таблицу — Условные обозначения деталей…

Рейка работает с прижимной лапкой, которая должна с определенной силой прижимать ткань к рейке по всей ее площади. В узле лапки для этого имеется регулируемая пружина, а также детали, с помощью которых осуществляется подъем лапки и опускание ее на ткань. Прижимная лапка может быть с подвижной подошвой и с качающейся на шарнире. Такие лапки удобны…
www.ktovdome.ru
Сборка эксцентрикового механизма - Слесарно-механосборочные работы
 Сборка эксцентрикового механизма
Сборка эксцентрикового механизма Категория:
Слесарно-механосборочные работы
Сборка эксцентрикового механизма Эксцентриковый механизм служит для преобразования вращательного движения в возвратно-поступательное. Его применяют в станках, штамповочных прессах, в золотниковом и клапанном распределении машин-двигателей. Эксцентриковый механизм представляет собой разновидность кривошипно-ша-тунного механизма с небольшим радиусом кривошипа.
Эксцентриковый механизм показан на рис. 1. Разъемный эксцентриковый механизм (рис. 1) имеет круглый диск (эксцентрик), сидящий на шпонке и на валу. Оси вала и диска не должны совпадать. Расстояние между осями (эксцентриситет) является радиусом кривошипа. Диск охватывается разъемным хомутом, скрепляемым болтами. С хомутом соединяется шатун (и тяга 6), вилка которого через палец шарнирно соединяется с ползуном, получающим возвратно-поступательное движение (например, с ползуном пресса или с золотником распределения).
Эксцентриковый механизм может быть с двумя эксцентриками (рис. 1,б). Внутренний эксцентрик сидит на валу и охватывается внешним эксцентриком. Последний можно поворачивать и закреплять в различных положениях, что приводит к изменению эксцентриситета, а следовательно, и изменению длины хода ползуна. Применяется эксцентриковый механизм в золотниковых парораспределителях и регуляторах нефтяных двигателей. Эксцентрики изготовляются из чугуна или из углеродистой стали. Внутреннюю поверхность хомута заливают баббитом.

Рис. 1. Эксцентрики: а — с разъемным хомутом, б — с механизмом для регулировки эксцентриситета
Сборку и регулирование эксцентрикового механизма обычно начинают с посадки эксцентрика на вал. Эксцентрик закрепляют на валу шпонкой. Собранный вал устанавливают в подшипники, после этого на эксцентрик надевают хомут и скрепляют болтами. Предварительно нижнюю половину хомута соединяют с шатуном.
Регулируют зазор между эксцентриком и хомутом прокладками, устанавливаемыми между плоскостями разъема хомута. По мере износа рабочей поверхности хомута во время работы эксцентрика эти прокладки постепенно удаляют.
После сборки и регулирования эксцентрика соединяют вилки шатуна с ползуном. Шатун регулируют только по длине стяжной гайкой. Это регулирование необходимо для установки конечных положений хода ползуна.
Из контрольных операций при сборке эксцентриков наиболее важной является проверка перпендикулярности оси вала эксцентрика направляющим ползуна. Если будут перекосы, то это приведет к увеличенному износу направляющих ползуна и рабочих поверхностей эксцентрика хомута.
Читать далее:
Сборка кулисного механизма
Статьи по теме:
pereosnastka.ru
Эксцентриковый механизм
Использование: в эксцентриковых преобразователях вращательного движения в возвратно-поступательное. Сущность: на приводном валу эксцентрично установлены подшипники. В корпусе установлены взаимно перпендикулярно с возможностью вращения и возвратно-поступательного перемещения рамки. На рамках закреплены подшипники, которые связаны хомутами с подшипниками. Для уравновешивания суммарной составляющей сил инерции движущихся частей на приводной валу установлена балансировочная масса. 2 з. п. ф-лы, 2 ил.
Изобретение относится к машиностроению, а именно к эксцентриковым преобразователям вращательного движения в возвратно-поступательное, может найти применение в частности в конструкциях объемных нагнетателей - поршневых, сильфонных или мембранных насосах, компрессорах и вакуумных насосах.
Известен эксцентриковый привод, содержащий корпус, установленный в нем с возможностью вращения приводной вал и ступень преобразования движения, состоящую из эксцентрично установленного на приводном валу подшипника и рамки, установленной в корпусе с возможностью перемещения в направлении, перпендикулярном оси приводного вала. Недостатком известного привода заключается в повышенном шуме, обусловленном обкатыванием внешнего кольца эксцентричного подшипника по рамке и неустранимой неуравновешенностью возвратно-поступательно движущихся масс, а также ограниченностью функциональных возможностей механизма, определяемой наличием только двух выходных элементов для подсоединения исполнительных органов. Цель изобретения - снижение шума путем устранения обкатывания подшипника по рамке и полного уравновешивания, а также расширение функциональных возможностей путем обеспечения большего числа подсоединяемых рабочих органов. Для достижения цели предлагается ступень преобразования движения известного эксцентрикового механизма снабдить дополнительным подшипником, одно из колец которого закреплено на рамке, а другое жестко соединено с внешним кольцом эксцентричного подшипника. Кроме того, механизм снабжен балансировочной массой и дополнительной ступенью преобразования движения, ориентированной таким образом, что направление движения ее рамки перпендикулярно направлению движения рамки основной ступени. Кроме того, приведенные массы обеих ступеней выполнены одинаковыми, эксцентричные подшипники размещены на общей оси, а балансировочная масса закреплена на приводном валу со смещением в сторону, противоположную эксцентриситету. На фиг. 1 показан эксцентриковый механизм; на фиг. 2 - диаграмма сил инерции возвратно-поступательно движущихся масс. Эксцентриковый механизм содержит корпус 1, установленный в нем с возможностью вращения (ось О-О) приводной вал 2 и ступень преобразования движения, состоящую из эксцентрично (эксцентриент е1) установленного на приводном валу 2 подшипника 3 и рамки 4, установленной в корпусе 1 с возможностью перемещения в направлении А-А, перпендикулярном оси О-О приводного вала 2. При этом ступень преобразования движения снабжена дополнительным подшипником 5, одно из колец 6 (внутреннее) которого закреплено на рамке 4, а другое кольцо 7 (наружное) жестко соединено хомутами 8 с внешним кольцом 9 подшипника 3. Кроме того, механизм может быть снабжен балансировочной массой 10 и дополнительной ступенью преобразования движения с эксцентричным подшипником 11 и рамкой 12. При этом дополнительная ступень ориентирована таким образом, что направление Б-Б движения ее рамки 12 перпендикулярно направлению А-А движения рамки 4 основной ступени. На рамке 12 закреплен подшипник 13, наружное кольцо которого жестко соединено с подшипником 11 хомутом 14. Кроме того, приведенные массы подвижных деталей (подшипники, рамка с рабочими органами и частично - хомуты) обеих ступеней выполнены одинаковыми, эксцентричные подшипники 3 и 11 размещены на общей оси, а балансировочная масса 10 закреплена на приводному валу 2 со смещением в сторону, противоположную е1. Механизм работает следующим образом. При вращении приводного вала 2 эксцентричные подшипники 3 и 11 совершают вращательное движение по окружности радиусом е1. Через хомуты 8 и 14, надетые на их наружные кольца 9 и на наружные кольца 7 подшипников 5 и 13 вращательное движение вала 2 и колец 6 преобразуется в возвратно-поступательное движение рамок 4 и 12 в направляющих корпуса 1. Закрепленные на концах рамок 4 и 12 исполнительные органы (например поршни, диафрагмы, сильфоны) совершают полезную работу. С достаточной степенью точности можно считать зависимость линейного перемещения рамок 4 и 12 от угла поворота приводного вала 2 синусоидальной. XA= e1 sin A= e1 sin
A= e1 sin t; XБ= e1 sin Б. Поскольку оси А-А и Б-Б взаимно перпендикулярны, то Б= A-90о, ХБ= е1 sin( A-90o)= e1 cos A= e1 cos t. Тогда выражения для сил инерции FA= mA e12 sin t; FБ= mБ e12 cos t, при равенстве приведенных масс mA= mБ= m FA= F sin t FБ= F cos t. Очевидно, что такие же проекции силы энерции имеет постоянная масса m, вращающаяся по радиусу е1 с угловой скоростью , т. о. наличие балансировочной массы 10 со стороны, противоположной эксцентритету е1, позволяет уравновесить суммирующую сил инерции, действующих по осям А и Б. Таким образом, исключая обкатывание подшипников по рамке и уравновешивая механизм, можно добиться существенного снижения шума и вибрации. Предложенная конструкция эксцентрикового механизма реализована в опытных образцах диафрагменных вакуумных насосов. Практически достигнутое улучшение шумовых и вибрационных характеристик позволило удовлетворить высокие требования, предъявляемые к насосам в медицинской технике. (56) Авторское свидетельство СССР N 1397653, кл. F 16 H 21/18, 1988.
t; XБ= e1 sin Б. Поскольку оси А-А и Б-Б взаимно перпендикулярны, то Б= A-90о, ХБ= е1 sin( A-90o)= e1 cos A= e1 cos t. Тогда выражения для сил инерции FA= mA e12 sin t; FБ= mБ e12 cos t, при равенстве приведенных масс mA= mБ= m FA= F sin t FБ= F cos t. Очевидно, что такие же проекции силы энерции имеет постоянная масса m, вращающаяся по радиусу е1 с угловой скоростью , т. о. наличие балансировочной массы 10 со стороны, противоположной эксцентритету е1, позволяет уравновесить суммирующую сил инерции, действующих по осям А и Б. Таким образом, исключая обкатывание подшипников по рамке и уравновешивая механизм, можно добиться существенного снижения шума и вибрации. Предложенная конструкция эксцентрикового механизма реализована в опытных образцах диафрагменных вакуумных насосов. Практически достигнутое улучшение шумовых и вибрационных характеристик позволило удовлетворить высокие требования, предъявляемые к насосам в медицинской технике. (56) Авторское свидетельство СССР N 1397653, кл. F 16 H 21/18, 1988.Формула изобретения
1. ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ, содержащий корпус, установленный в нем с возможностью вращения приводной вал и ступень преобразования движения, состоящую из эксцентрично установленного на приводном валу подшипника и рамки, установленной в корпусе с возможностью перемещения в направлении, перпендикулярном к оси приводного вала, отличающийся тем, что он снабжен первым дополнительным подшипником, одно из колец которого закреплено на рамке, а другое жестко соединено с внешним кольцом эксцентричного подшипника. 2. Механизм по п. 1, отличающийся тем, что он снабжен балансировочной массой, закрепленной на валу, дополнительной ступенью преобразования движения, расположенной так, что направление движения ее рамки перпендикулярно направлению движения рамки ступени преобразования движения, вторым дополнительным подшипником, одно из колец которого закреплено на рамке дополнительной ступени преобразования движения, а другое жестко соединено с внешним кольцом эксцентричного подшипника дополнительной ступени преобразования движения. 3. Механизм по пп. 1 и 2, отличающийся тем, что приведенные массы подвижных деталей обеих ступеней преобразования движения выполнены одинаковыми, эксцентричные подшипники размещены на общей оси, а балансировочная масса закреплена противоположно эксцентриситету.РИСУНКИ
Рисунок 1, Рисунок 2Похожие патенты:

Изобретение относится к машиностроению и может быть использовано для регистрации суммарного эксцентриситета двух эксцентриков

Изобретение относится к машиностроению , а именно к кривошипно-ползунным механизмам, и может быть использовано в устройствах, где требуется преобразование вращательного движения в колебательное


Изобретение относится к машиностроению и может быть использовано в двигателях внутреннего сгорания

Изобретение относится к устройствам, служащим для перемещения подвижных валов , например, сукнои сетконатяжек, сеточной и прессовой частей бумагеи картоноделательных машин Целью изобретения является снижение энергоемкости путем поддержания заданного усилия прижима в процессе работы

Изобретение относится к машиностроению, а именно к механизмам для преобразования одного вида движения в другой

Изобретение относится к механизмам для преобразования возвратно-поступательного движения во вращательное и может быть использовано в механизмах поршневых машин, компрессоров, насосов и др

Изобретение относится к механизмам преобразования вращательного движения в возвратно-поступательное с регулируемой длиной хода ползуна

Изобретение относится к машиностроению и может быть использовано для организации возвратно-поступательного движения рабочих органов нагнетателей различных типов

Изобретение относится к преобразователям врашательного движения и возвратно-поступательное и наоборот и найдет применение, в частности, в поршневых машинах

Изобретение относится к области машиностроения и может найти применение в поршневых машинах

Изобретение относится к машиностроению, в частности к механизмам для преобразования вращательного движения в возвратно-поступательное или наоборот, и может быть использовано в транспорте и поршневых машинах
Изобретение относится к поршневым машинам

Изобретение относится к машиностроению, а более конкретно, к устройству ДВС

Изобретение относится к машиностроению, а более конкретно, к поршневым машинам и в частности, к механизмам поршневого привода


Изобретение относится к механизмам для преобразования вращательного движения в возвратно-поступательное и может быть использовано также в качестве суммирующего механизма

Изобретение относится к области машиностроения и может быть использовано для преобразования прямолинейного возвратно-поступательного движения поршней во вращательное движение валов в двигателях внутреннего сгорания, компрессорах, пневмомоторах, гидронасосах, гидромоторах и т.д

Изобретение относится к машиностроению

Изобретение относится к поршневым машинам и может быть использовано при создании компактных двигателей внутреннего сгорания
Изобретение относится к машиностроению, а именно к эксцентриковым преобразователям вращательного движения в возвратно-поступательное, может найти применение в частности в конструкциях объемных нагнетателей - поршневых, сильфонных или мембранных насосах, компрессорах и вакуумных насосах
www.findpatent.ru
Эксцентриковый механизм
Изобретение относится к механизмам для преобразования вращательного движения в возвратно-поступательное и может быть использовано также в качестве суммирующего механизма. Механизм представляет собой расположенные последовательно одна в другую n пар эксцентриков, в которых внутренние эксцентрики расположены концентрично, а внешние - эксцентрично ведомому звену, расположенному в центре устройства. Каждый эксцентрик в паре снабжен приводом его вращения относительно другого эксцентрика, а последний внешний эксцентрик шарнирно установлен в корпусе. При вращении по взаимосвязанным законам любой пары эксцентриков ведомое звено перемещается по прямой линии, а при вращении нескольких пар эксцентриков ведомое звено перемещается на расстояние, равное алгебраической сумме эксцентриситетов отдельных эксцентриков. Таким образом, расширяется диапазон перемещений ведомого звена без изменения эксцентриситета эксцентриков. 2 ил.
Изобретение относится к машиностроению, в частности к механизмам для преобразования вращательного движения в возвратно-поступательное, и может быть использовано в качестве суммирующего механизма.
Известен суммирующий механизм, содержащий корпус, в котором установлены элементы ввода, выполненные в виде толкателей и сопряженные с суммирующим элементом, пластину с выступом, ролики и пружины, в корпусе выполнен паз, а суммирующий элемент выполнен в виде клиньев, сопряженных с выступом пластины, на которой установлены ролики, размещенные в пазу корпуса, паз расположен перпендикулярно выступу пластины, элементы ввода и элемент вывода соединены с корпусом посредством соответствующей пружины (авт. свид. СССР N 746564, кл. G 06 G 3/00, 1980). Данный механизм отличается конструктивной сложностью, невысокой точностью и неудобен в работе. Известен суммирующий механизм, содержащий корпус и винтовые пары, взаимосвязанные между собой, винты расположены телескопически с возможностью осевого перемещения одного относительно другого и относительно корпуса, гайка большей пары установлена неподвижно в осевом направлении относительно корпуса, а гайки последующих винтовых пар установлены так же относительно винтов предыдущих пар (авт. свид. СССР N 316885, кл. F 16 H 25/02, 1970). Известный механизм имеет сложную конструкцию. Наиболее близким по технической сущности к изобретению является эксцентриковый механизм, содержащий два эксцентрика, один из которых расположен внутри другого, причем один из них шарнирно установлен в корпусе, привод относительного вращения эксцентриков, эксцентрик, установленный в корпусе, является внешним и также снабжен приводом вращения относительно корпуса (авт. свид. СССР N 1573271, кл. F 16 H 21/18, 1990, прототип). Данный механизм обладает недостаточным диапазоном перемещения ведомого звена и не позволяет осуществлять суммирование перемещений. Цель изобретения - расширение диапазона перемещений ведомого звена без изменения эксцентриситета его ведущих звеньев и обеспечение суммирования перемещений. Для этого эксцентриковый механизм, содержащий два эксцентрика, один из которых расположен внутри другого, ведомое звено, установленное с возможностью вращения внутри внутреннего эксцентрика, и привод относительного вращения эксцентриков, снабжен "n" дополнительными парами эксцентриков, расположенных в одной плоскости с основной парой эксцентриков, так что основная пара эксцентриков расположена внутри первой дополнительной пары, при этом во всех парах внешний эксцентрик расположен концентрично относительно ведомого звена и эксцентрично относительно внутреннего эксцентрика последующей пары, при этом последний внешний эксцентрик шарнирно установлен в корпусе. Такое выполнение эксцентрикового механизма расширяет диапазон перемещений ведомого звена и позволяет осуществлять суммирование перемещений. На фиг. 1 изображена схема предложенного механизма; на фиг. 2 - разрез А-А на фиг. 1. Эксцентриковый механизм содержит корпус 1, эксцентрики 2 и 3 и установленное внутри эксцентрика 2 ведомое звено 4. Механизм снабжен n дополнительными парами аналогичных эксцентриков, расположенных в одной плоскости с основными эксцентриками 2 и 3. На чертеже показаны две пары дополнительных эксцентриков 5, 6 и 7, 8. Все внешние эксцентрики в парах расположены концентрично, а все внутренние эксцентрики - эксцентрично относительно ведомого звена 4. Последний внешний эксцентрик 8 с возможностью вращения установлен в корпусе 1, а ведомое звено 4 также с возможностью вращения установлено в эксцентрике 2. Все последующие внутренние эксцентрики 5 и 7 также с возможностью вращения расположены внутри внешних эксцентриков 6 и 8 соответственно. Последний эксцентрик 8 снабжен приводом его вращения относительно корпуса 1, а находящийся в паре с ним эксцентрик 7 - приводом его вращения относительно эксцентрика 8. В другой крайней паре эксцентрик 2 снабжен приводом его вращения относительно эксцентрика 3, а эксцентрик 3 - приводом его вращения относительно эксцентрика 2. Аналогичными приводами в каждой паре снабжены и эксцентрики, расположенные между крайними парами. Кинематическая связь эксцентриков с соответствующими приводами (не показаны) осуществляется через редукторные шестерни 9-14 соответственно. Ведомое звено 4 снабжено роликами 15, расположенными в направляющих 16, выполненных в корпусе 1. Механизм работает следующим образом. При вращении по взаимосвязанным законам (по стрелкам А и Б), например, эксцентриков 2 и 3, ведомое звено 4 (точнее некоторая его точка, например точка "0" - центр осей) перемещается по прямой линии. Изменяя начальную фазу положения каждого эксцентрика можно изменять положение траектории в плоскости перемещения. В случае равенства эксцентриситетов обоих эксцентриков можно обеспечить перемещение ведомого звена 4 через геометрический центр эксцентрика 2 на длину, равную четырем эксцентриситетам. Механизм работает аналогично, если по взаимосвязанным законам осуществлять вращение эксцентриков какой-либо другой пары. При этом заметим, что при вращении эксцентриков 5 и 6 (вторая пара) ведомым звеном будет эксцентрик 3, а при вращении эксцентриков 7 и 8 (третья пара) ведомым звеном будет эксцентрик 6. При этом вместе с указанными ведомыми звеньями одновременно будет перемещаться и основное ведомое звено 4. При одновременном вращении эксцентриков во всех парах ведомыми звеньями одновременно будут: основное ведомое звено 4 и эксцентрики 3 и 6, т.е. те звенья механизма, которые расположены концентрично основному ведомому звену 4. В случае равенства эксцентриситетов всех эксцентриков можно обеспечить перемещение ведомого звена 4 через геометрический центр эксцентрика 2 на длину S, равную S = 4n , (I) где n - число пар эксцентриков; - величина эксцентриситета отдельного эксцентрика. Формула (I) предусматривает согласное направление эксцентриситетов (например, так, как показано на фиг. 1) и одинаковое направление вращения приводов. При несоблюдении этого будет происходить не арифметическое, а алгебраическое сложение перемещений ведомого звена 4. Очевидно, что при этом суммируются также и усилия перемещения. При четном числе пар эксцентриков в идеальном случае (одновременность включения приводов, равенство скоростей вращения и других электромеханических характеристик, например времени разгона привода и др.) при соответствующем включении эксцентриков и приводов, перемещения ведомого звена 4, вызываемые отдельными парами эксцентриков будут компенсировать друг друга, в результате чего ведомое звено 4 не будет перемещаться, а будет оставаться на месте. Если же в данном случае отдельные привода включать не одновременно, а поочередно, то можно получить возвратно-поступательное движение ведомого звена 4, причем с разными длинами перемещения в том и другом направлении.
, (I) где n - число пар эксцентриков; - величина эксцентриситета отдельного эксцентрика. Формула (I) предусматривает согласное направление эксцентриситетов (например, так, как показано на фиг. 1) и одинаковое направление вращения приводов. При несоблюдении этого будет происходить не арифметическое, а алгебраическое сложение перемещений ведомого звена 4. Очевидно, что при этом суммируются также и усилия перемещения. При четном числе пар эксцентриков в идеальном случае (одновременность включения приводов, равенство скоростей вращения и других электромеханических характеристик, например времени разгона привода и др.) при соответствующем включении эксцентриков и приводов, перемещения ведомого звена 4, вызываемые отдельными парами эксцентриков будут компенсировать друг друга, в результате чего ведомое звено 4 не будет перемещаться, а будет оставаться на месте. Если же в данном случае отдельные привода включать не одновременно, а поочередно, то можно получить возвратно-поступательное движение ведомого звена 4, причем с разными длинами перемещения в том и другом направлении.Формула изобретения
Эксцентриковый механизм, содержащий два эксцентрика, один из которых расположен внутри другого, ведомое звено, установленное с возможностью вращения внутри внутреннего эксцентрика, и привод относительного вращения эксцентриков, отличающийся тем, что он снабжен n дополнительными парами эксцентриков, расположенных в одной плоскости с основной парой эксцентриков так, что основная пара эксцентриков расположена внутри первой дополнительной пары, при этом во всех парах внешний эксцентрик расположен концентрично относительно ведомого звена и эксцентрично относительно внутреннего эксцентрика последующей пары, при этом последний внешний эксцентрик шарнирно установлен в корпусе.РИСУНКИ
Рисунок 1, Рисунок 2www.findpatent.ru







423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)