 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
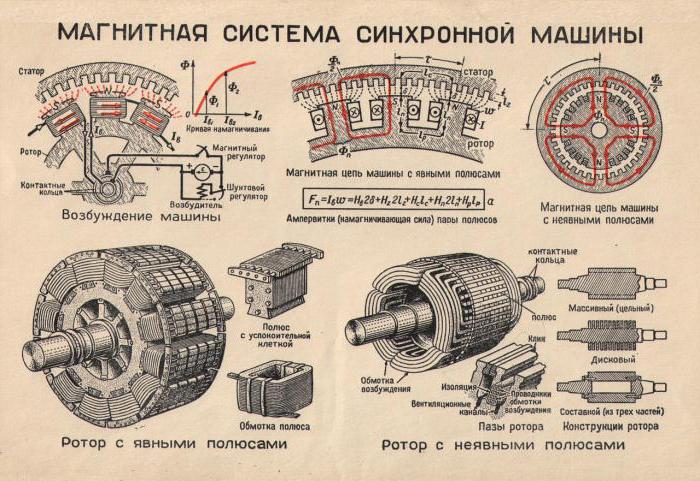
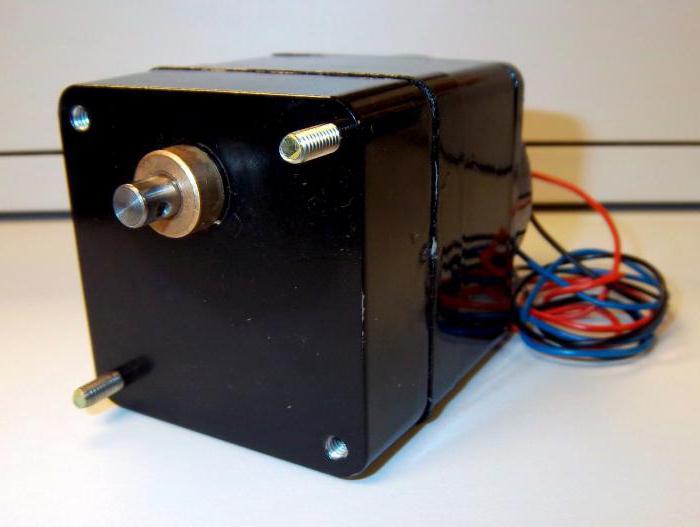
Устройство и принцип действия синхронного двигателя. Синхронный электродвигатель
Синхронные электродвигатели. Работа и применение. Особенности
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
• Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.• Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Похожие темы:
electrosam.ru
Принцип действия синхронного двигателя
Содержание:- Устройство синхронного двигателя
- Принцип работы
- Запуск двигателя и его регулировка
- Различия синхронных и асинхронных двигателей
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
electric-220.ru
Синхронные электродвигатели: устройство, схема
Особенностью синхронных электродвигателей является то, что у магнитного потока и ротора скорости вращения одинаковы. По этой причине ротор электрического двигателя не изменяет свою скорость при увеличение нагрузки. На роторе находится обмотка, которая создает магнитное поле.
Иногда используются мощные постоянные магниты. Обычно в синхронных машинах на роторе столько же обмоток, сколько и на статоре. Так получается выровнять скорости вращения магнитного потока и ротора. Нагрузка, которая подключена к электродвигателю, на скорость не влияет вообще.
Конструкция электродвигателя

Устройство синхронного электродвигателя состоит из следующих элементов:
- Неподвижная часть — статор, на котором располагаются обмотки.
- Подвижный ротор, его иногда называют индуктором или якорем.
- Передние и задние крышки.
- Подшипники, устанавливаемые на роторе.
Между якорем и статором имеется свободное пространство. В пазах закладываются обмотки, они соединяются в звезду. Как только на двигатель подается напряжение, по обмотке якоря начинает протекать ток. Образуется магнитное поле вокруг индуктора. Но на статор тоже подаётся напряжение. И здесь возникает магнитный поток. Эти поля смещены относительно друг друга.
Как работает синхронный мотор
В синхронных машинах электромагниты на статоре являются полюсами, так как они работают на постоянном токе. Всего существует две схемы, по которым соединяются обмотки статоров:
- Явнополюсная.
- Неявнополюсная.
Для того чтобы снизить магнитное сопротивление и оптимизировать условия прохода поля, применяются сердечники, изготовленные из ферромагнетиков. Они имеются как в статоре, так и в роторе.

Изготавливаются они из специальных сортов электротехнической стали, в которой содержится огромное количество такого элемента, как кремний. С помощью этого удается значительно понизить вихревой ток, а также увеличить электрическое сопротивление металла.
В основе работы синхронных электродвигателей лежит взаимодействие полюсов статора и ротора. При запуске происходит ускорение до скорости движения потока. Именно в таких условиях электрический двигатель действует в синхронном режиме.
Метод запуска с помощью дополнительного электромотора
Ранее использовались специальные двигатели для запуска, которые соединялись с мотором при помощи механических устройств (ременной передачей, цепной, и пр.). Во время запуска ротор начинал вращаться и, постепенно ускоряясь, достигал значения синхронной скорости. После этого электродвигатель сам начинал работать. Именно такой принцип действия у синхронного электродвигателя, независимо от конструкции и производителя.
Обязательным условием является то, что пусковой электродвигатель должен иметь мощность около 15% от аналогичной характеристики разгоняемого мотора. Такой мощности оказывается вполне достаточно, чтобы запустить любой синхронный электродвигатель, даже если к нему подключена небольшая нагрузка. Этот метод довольно сложный, а себестоимость всего оборудования значительно повышается.
Современный метод запуска
Современные конструкции синхронных электродвигателей не оснащаются подобными схемами для разгона. Используется другая система запуска. Примерно таким образом происходит включение синхронной машины:
- При помощи реостата замыкаются обмотки ротора. В результате якорь становится короткозамкнутым, как на простых асинхронных электродвигателях.
- На роторе имеется еще и короткозамкнутая обмотка, которая является успокоительной, с ее помощью предотвращается качание якоря во время синхронизации.
- Как только якорь достигает минимальной скорости вращения, к его обмоткам подключается постоянный ток.
- Если используются постоянные магниты, то применять внешние пусковые двигатели придется обязательно.
Существуют криогенные синхронные электромоторы, в которых используется конструкция обращенного типа. Обмотки возбуждения изготавливаются из сверхпроводниковых материалов.
Преимущества синхронных машин

Асинхронные и синхронные электродвигатели имеют очень схожие конструкции, но различия всё равно имеются. В последних имеется явное преимущество в том, что происходит возбуждение от источника постоянного тока. В этом случае может мотор работать при очень большом коэффициенте мощности. Существуют также другие преимущества синхронных двигателей:
- Они работают с завышенным коэффициентом. Это позволяет уменьшить расход электроэнергии, а также существенно снижает потери тока. Коэффициент полезного действия синхронной машины будет намного выше, нежели у асинхронного двигателя с такой же мощностью.
- Крутящий момент напрямую зависит от того, какое напряжение в питающей сети. Даже при условии, что напряжение в сети уменьшится, мощность сохранится.
Но всё равно асинхронные машины используется намного чаще, нежели синхронная. Дело в том, что они имеют большую надежность, простую конструкцию, не требуют дополнительного ухода.
Недостатки синхронных двигателей

Оказывается, что недостатков у синхронных машин намного больше. Вот только основные:
- Схема синхронного электродвигателя довольно сложная, она состоит из большого количества элементов. Именно по этой причине себестоимость устройства оказывается очень высокой.
- Обязательно нужно использовать для питания индуктора источник постоянного тока. Это значительно усложняет всю конструкцию.
- Процедура запуска электрического двигателя довольно сложная, нежели у асинхронных машин.
- Произвести регулировку частоты вращения ротора можно только при помощи использования частотных преобразователей.
В целом же, преимущества существенно перекрывают недостатки синхронных электродвигателей. По этой причине они очень часто используются там, где необходимо вести непрерывный постоянный производственный процесс, где не нужно часто останавливать и запускать оборудование. Синхронные машины можно встретить в мельницах, дробилках, насосах, компрессорах. Они редко выключаются, работают почти постоянно. За счет применения таких моторов можно достичь существенной экономии электроэнергии.
fb.ru
Устройство и принцип действия синхронного двигателя
Принцип действия синхронного двигателя примерно такой же, как и у асинхронного. Но есть несколько отличий, которые имеют ключевое значение при выборе мотора для той или иной конструкции. В промышленности получили широкое распространение асинхронные машины – их доля достигает 96% от общего количества электрических двигателей. Но это вовсе не говорит о том, что отсутствуют другие типы электрических агрегатов.
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока. И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение. В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.

Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны. Конструкция включает в себя такие элементы, как:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.

Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя

В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
- Явнополюсными.
- Неявнополюсными.
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Самое сложное в работе синхронного мотора – это его запуск. Именно поэтому его используют крайне редко. Ведь конструкция усложняется за счет системы запуска. На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним. Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты. Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
fb.ru
Синхронный и асинхронный двигатель: отличия, принцип работы, применение
Классификация двигателей основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни синхронному генератору. Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается синхронный двигатель от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей - в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
 В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.

Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
fb.ru
Синхронные двигатели — принцип работы, конструкции
Все электродвигатели построены на одном и том же принципе взаимодействия магнитных полей. Катушка с сердечником из ферромагнитного материала оказывает заметное механическое воздействие на другую аналогичную катушку. Разноименные полюсы соленоидов притягиваются, а одноименные — отталкиваются.
Поэтому в двигателе должно быть пространственное перемещение полюсов магнитного поля, создаваемое одной его частью. А другая часть движка создает свои полюсы и откликается вращением на пространственное перемещение полюсов. Она может содержать как постоянные магниты, так и катушки с сердечником. Далее расскажем о том, как магнитные поля функционируют в синхронных двигателях, а также предоставим другую информацию об этих машинах.
Конструктивные особенности
Синхронный двигатель содержит
- часть конструкции, в которой создается перемещающееся магнитное поле, называемую статором;
- часть двигателя, которая вращается от воздействия магнитного поля, называемую ротором;
- провод, соединяющий движок с источником питания, который сравнивают с якорной цепью корабля. Чтобы указать на ту часть двигателя, которая присоединена к проводу, ее называют якорем. В рассматриваемой машине питающий провод присоединен к статору. Следовательно, это якорь.
 Составные частит синхронных двигателей
Составные частит синхронных двигателей Чем больше витков содержат взаимодействующие катушки, тем меньший ток потребуется для эффективной работы движка. Но сила тока — это не самая сложная проблема. Главное — создать пространственное перемещение магнитного поля, что весьма непросто.
По этой причине синхронный двигатель появился только после того, как заработал первый генератор. Его создал в 1891 г. М.О. Доливо-Добровольский. Обратимость электрических машин позволяет использовать их и генераторами, и двигателями. Обратима и синхронная машина. Но для движков существуют определенные конструктивные ограничения, которых нет у генераторов.
Принцип работы
Для получения направления вращения статор двигателя должен содержать как минимум две катушки. Только в такой конструкции можно создать направленное перемещение магнитного поля. Это определяет устройство и принцип работы многих электродвигателей, питаемых от сети. Для нормальной работы синхронной машины, если это генератор, статор может содержать только одну катушку и быть источником ЭДС. Его ротор вращается принудительно. При этом, независимо от направления вращения, на клеммах статора появится переменное напряжение.
Но если такой генератор используется как двигатель, направление вращения его ротора может быть в обе стороны.
Оно будет определяться
- либо положением ротора в момент подачи напряжения на клеммы статора;
- либо принудительно направлением стартового вращения.
Конструкцию большинства электрических машин в основном определяет система электроснабжения, с которой они связаны. В наши дни первичными источниками ЭДС являются трехфазные генераторы. Эти машины создают трехфазное напряжение. Оно позволяет непосредственно получать перемещающееся магнитное поле. Без него синхронные двигатели переменного тока не могут работать, так же, как и асинхронные движки.
Для этого используются три или две фазы, питающие обмотки статора движка. Устройство синхронного двигателя должно соответствовать схеме электропитания. Наилучший результат получается при трехфазной конструкции статора. В этом случае магнитное поле получается вращающимся. По этой причине трехфазный синхронный двигатель является наиболее эффективным, если его сравнивать с аналогами, но при меньшем числе фаз.
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула
 Формула
ФормулаВ результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
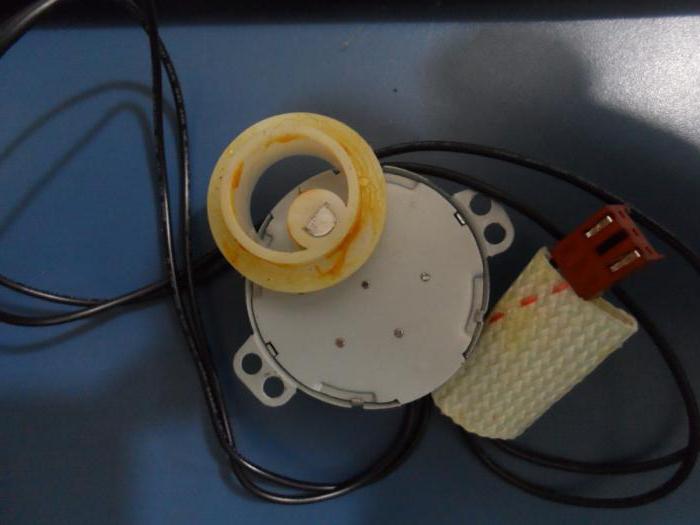
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
 Варианты устройства синхронных двигателей
Варианты устройства синхронных двигателей Разновидности роторов
Разновидности роторов Принцип работы ротора
Принцип работы ротора Один из вариантов конструкции двигателя
Один из вариантов конструкции двигателя Ротор с постоянными магнитами
Ротор с постоянными магнитами Гистерезисный движок
Гистерезисный движок
 Три разновидности конструкции ротора реактивного двигателя
Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.
 Классический движок с индуктором
Классический движок с индукторомТакое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.
 Движки-компенсаторы на подстанции
Движки-компенсаторы на подстанцииРазвитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Похожие статьи:domelectrik.ru
принцип работы, схема, характеристики / Школа электрика / Коллективный блог
Содержание:
Синхронный двигатель – это электрическая машина, работающая от переменного тока. Главная её особенность которой заключается в том, что скорость (частота), с которой вращается ротор, равна частоте вращения магнитного поля. Именно поэтому частота ротора остается неизменной вне зависимости от подключаемой нагрузки. Этого удается достичь благодаря тому, что ротор синхронного двигателя – это электромагнит (как вариант – постоянный магнит), чье число пар полюсов полностью совпадает с числом пар полюсов у вращающегося магнитного поля. Именно взаимодействие этих полюсов гарантирует постоянство угловой скорости, с которой вращается ротор, вне зависимости от момента, приложенного в любой момент к валу.
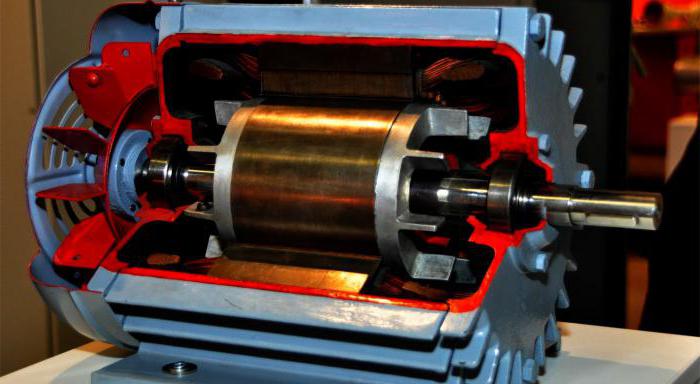
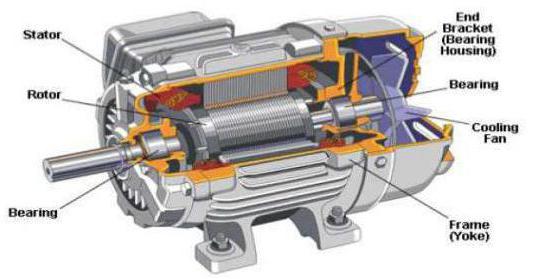
Рис. 1 Синхронный двигатель (разрез)
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
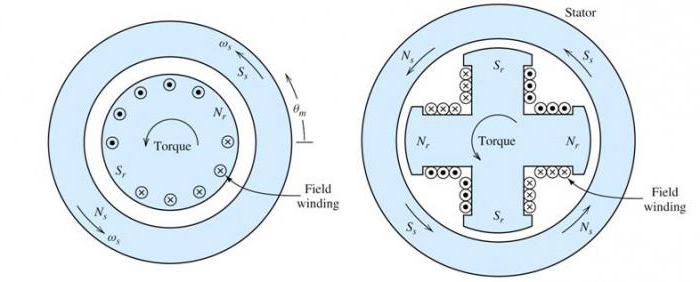
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Синхронный двигатель: угловая характеристика
В синхронном двигателе вращающий момент зависит от угла Ø, получающегося между полем статора и осями полюсов ротора и описывается формулой
М = Мм * sin Ø, в которой Мм – максимально возможное значение момента.
Для синхронной машины полученную зависимость М = f (θ) называют угловой характеристикой
Рис. 5 Угловая характеристика работы синхронного двигателя
Видно, что работа синхронного двигателя будет стабильна и устойчива на начальном участке, поэтому обычно выбирает угол Ø, не превышающий значение 30-35°. С ростом угла устойчивость работы существенно снижается, в точке В (Ø = 90, так называемая предельная точка), стабильная работа невозможна. Поэтому момент, который соответствует пределу устойчивости, принято называть опрокидывающим (максимальным) моментом.
Если нагрузка синхронного двигателя превысит Мм, то произойдет выпадение ротора двигателя из режима синхронизма, произойдет его остановка, машина переходит в аварийный режим. Именно поэтому, с учетом резервирования мощности, номинальный момент для двигателя подбирают меньше в 2-3 раза, чем опрокидывающий.
Синхронный двигатель: плюсы и минусы
Несомненным преимуществом синхронных двигателей, если сравнивать их с асинхронными аналогами, является то, что возбуждение постоянным током от независимого источника позволяет работать им при высоком значении cosφ (коэффициента мощности) и даже при условиям с опережающим током. Такая особенность позволяет благодаря подключению синхронного двигателя поднять показатель cosφ для всей сети. Кроме того, следует отметить и другие преимущества:
- благодаря тому, что синхронный двигатель работает с высоким cosφ, это обеспечивает снижение потребляемого тока и уменьшение потерь. По сравнению с асинхронным двигателем, имеющим ту же мощность, КПД синхронного будет выше
- у синхронного двигателя вращающий момент пропорционален действующему напряжению сети (Uc). Поэтому синхронный двигатель даже при снижении напряжения в сети сохраняет нагрузочную способность больше, чем асинхронный. Это говорит о большей надежности такого типа двигателей.
В то же время, если сравнивать конструктивные особенности двух типов двигателей, синхронный и асинхронных, стоит отметить, что конструкция синхронных – сложнее, а значит они будут дороже при производстве. Так же существенным минусом для синхронных двигателей является необходимость наличия источника постоянного тока (выпрямитель или специальный возбудитель). Кроме того, по сравнению с асинхронным двигателем, пуск у них происходит гораздо сложнее. К недостаткам следует отнести и то, что единственная возможность регулировать (корректировать) угловую частоту вращения у синхронного двигателя – это частотное регулирование.
Рис. 6 Синхронные двигатели
В результате сравнительного анализа стоит сделать вывод, что преимущества, характерные для синхронных двигателей (особенно на высокомощных, больше 100 кВт двигателях ) значительно превосходят имеющиеся недостатки. Именно поэтому они получили подавляющее распространение в тех длительных технологических процессах, не требующих производить частые остановки/запуски и где нет необходимости регулировать частоту вращения. На сегодняшних день синхронные двигатели практически безальтернативный вариант для мельниц, насосов, компрессоров, вентиляторов, дробилок, нерегулируемых прокатных станах и в качестве привода для различных преобразовательных агрегатов.
При выборе конкретной модели синхронного двигателя основополагающими являются факторы:
- условия, где будет производиться эксплуатация. От этого зависит тип двигателя (открытый, закрытый, защищенный), защита токоведущих частей и обмоток двигателя от влаги, пыли, высокой температуры, едких паров. При работе во взрывоопасной среде предусматриваются специальные меры защиты, направленные на недопущение искрообразования в машине
- особенности соединения синхронного двигателя с нагрузкой (рабочей машиной).
44kw.com









423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)