 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
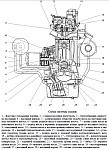
14.4. Гидравлические экскаваторы с рабочим оборудованием прямая лопата. Прямая лопата экскаватора
4. Одноковшовые экскаваторы типа прямая напорная лопата.
В зависимости от системы напорного механизма и конструкции стрелы различают три основных типа прямой механической лопаты:
с зубчато-реечным механизмом напора;
с канатным механизмом напора;
колено-рычажные напорные лопаты.
Напорные лопаты предназначены для разработки массивов, расположенных выше уровня стояния машины, и способны осуществлять черпание ниже уровня стояния на незначительную глубину, достаточную только для само заглубления экскаватора при проходке траншей.
4.1. Экскаваторы типа прямая напорная лопата с выдвижной рукоятью и зубчато-реечным механизмом напора.
Прямая напорная лопата с выдвижной рукоятью (см. рис.4.1.) состоит из ковша 1, рукояти 2, удерживаемой седловым подшипником 3 и деталями напорного механизма.
Рис.4.1. Конструктивная схема прямой напорной лопаты с выдвижной
рукоятью и зубчато-реечным механизмом напора
1 – ковш; 2 – рукоять; 3 – седловой подшипник; 4 – стрела; 5 – поворотная платформа; 6 – шарнир; 7 – подвеска стрелы; 8 – подъемный канат; 9 – лебедка; 10 – головной блок; 11 – зубчатая рейка; 12 – кремальерная шестерня.
Стрела 4 опирается на поворотную платформу 5 с помощью шарнира 6 и поддерживается посредством подвески 7. Подъемный канат 8 от лебедки 9 проходит через головной блок 10 стрелы и соединяется с подвеской ковша. Зубчато-реечный механизм напора расположен на стреле и передает усилие на зубчатую рейку 11 рукояти через кремальерную шестерню 12.
Напорное усилие на ковше прямой лопаты создается с помощью специального механизма – механизма напора (рис.4.2.).
Рис.4.2. Зубчато-реечный механизм напора
1 – кремальерная шестерня; 2 – зубчатая рейка; 3 – рукоять; 4 – ковш;
5 – седловой подшипник; 6 – стрела; 7 – подъемный канат.
Усилие от привода механизма напора через кремальерную шестерню 1 и зубчатую рейку 2 передается на рукоять 3 ковша 4, передвигающуюся в седловых подшипниках 5. Привод механизма напора (электродвигатель) расположен на стреле 6 у седлового подшипника. Положение рукояти в седловом подшипнике позволяет ей поворачиваться в вертикальной плоскости относительно горизонтальной оси под действием усилия в подъемном канате 7, а также поступательно перемещаться в седловом подшипнике в результате действия напорного механизма.
Рукоять служит для передачи на ковш напорного усилия. В зависимости от числа балок различают однобалочные (внутренние) и двухбалочные (внешние) рукояти. Экскаваторы с зубчато-реечным механизмом напора имеют внешнюю рукоять, которая состоит из двух балок, охватывающих стрелу, выполненную в виде одной балки. Двухбалочная рукоять охватывает стрелу снаружи и проходит через два направляющих гнезда седлового подшипника, смонтированного на напорном валу снаружи конструкции стрелы.
Таблица 4.1.
Техническая характеристика экскаваторов прямая напорная лопата с выдвижной рукоятью и зубчато-реечным механизмом напора производства АО «УЗТМ»
| Показатели | Модель экскаватора | |
| ЭКГ-5А | ЭКГ-20А | |
| Вместимость ковша, м3 | 5,2 | 20 |
| Угол наклона стрелы, градус. | 45 | 45 |
| Длина стрелы, м | 10 | 17 |
| Максимальный радиус черпания, м | 14,5 | 22,1 |
| Максимальная высота черпания, м | 10,3 | 17,9 |
| Максимальный радиус разгрузки, м | 12,3 | 20 |
| Скорость передвижения, км/ч | 0,55 | 0,9 |
| Теоретическая продолжительность цикла, с * | 23 | 28 |
| Конструктивная масса экскаватора (без противовеса), т | 154 | 900 |
| Масса противовеса, т | 40 | 160 |
На базе серийного экскаватора ЭКГ-5А выпускается экскаватор
ЭКГ-5Д, оборудованный дизель-электрическим приводом, дающим возможность эксплуатировать машину в условиях отсутствия линии электропередачи.
studfiles.net
14.4. Гидравлические экскаваторы с рабочим оборудованием прямая лопата
На гидравлический экскаватор для разработки грунтов выше уровня стоянки навешивают рабочее оборудование прямая лопата (рис. 14.5, а),состоящее из стрелы /, рукояти 3и ковша 5.Стрела здесь обычно короче, чем у обратной лопаты. Привод стрелы обеспечивается двумя гидроцилиндрами 8,а рукояти — гидроцилиндром 2.
Относительно рукояти ковши могут быть поворотными, неповоротными и челюстными. Поворотный ковшможет изменять свое положение относительно рукояти как для установки требуемого угла резания, так и для выгрузки фунта с помощью гидроцилиндра 4,коромысла 7 и тяги 6.
Рис. 14.5. Гидравлический одноковшовый экскаватор с рабочим оборудованием прямая лопата (а), неповоротный (б) и челюстной (в) ковши
Неповоротные ковши(рис. 14.5, б)устанавливают на рукояти с постоянным углом резания, который может быть изменен заменой тяги 10соответствующей длины. В нижней части корпуса ковша на шарнире 11установлено откидывающееся днище 13,закрываемое подпружиненной щеколдой 15.Для разгрузки грунта Посредством гидроцилиндра 9через рычаг 12и цепь 14щеколду ^вдергивают из своего гнезда на корпусе, после чего днище открывается под действием собственной силы тяжести. Захлопывается днище автоматически при опускании ковша в нижнее положение для начала копания.
Челюстной ковш(рис. 14.5, в)состоит из шарнирно соединенных между собой двух челюстей — корпуса 18и днища 17.В режиме копания и транспортирования грунта челюсти сомкнуты, а для разгрузки грунта они размыкаются гидроцилиндром 16,вмонтированным в днище ковша.
Экскаватор с рабочим оборудованием прямая лопата разрабатывает грунт движением ковша снизу (от уровня стоянки экскаватора) вверх (до верхнего обреза забоя). Максимальная кинематическая высота копания реализуется лишь для маневровых дви
жений. Из-за опасности обрушения грунта копать на этой высоте нельзя. При копании на максимальном вылете ковша образуются навесы (козырьки), уже начиная с высоты оси пяты стрелы. Соблюдая требования безопасности, высоту забоя можно довести до 2/3 максимальной кинематической высоты. Хотя кинематика рабочего оборудования позволяет разрабатывать грунт ниже уровня стоянки экскаватора, реализовать это удается крайне редко — лишь на последней по ходу движения позиции экскаватора, так как отрытая перед ним выемка не позволяет экскаватору перемещаться вперед «на забой».
Для копания грунта поворачивают рукоять относительно стрелы, а толщину грунтовой стружки регулируют кратковременными движениями стрелы с перемещением ковша «на забой» или от него. В случае использования поворотных и челюстных ковшей возможна разработка грунта поворотом ковша. Структура рабочего цикла такая же, как и у экскаватора с рабочим оборудованием обратная лопата.
14.5. Погрузочное рабочее оборудование
Гидравлические экскаваторы с погрузочным оборудованием (рис. 14.6) применяют также для погрузки дробленых и сыпучих материалов. При загрузке ковша последний перемещают по подошве осыпающегося откоса штабеля, работая на малых вылетах. По условиям устойчивости машины и наилучшего использования энергетических параметров ее силовой установки на этих работах их ковши имеют повышенную вместимость (в 1,5—2 раза больше вместимости ковшей прямых лопат). Для погрузочного оборудова-
Рис. 14.6. Рабочее оборудование погрузчика
дня обычно используется корневая секция составной стрелы обратной лопаты 1.Она связана с подвеской 6ковша 4посредством рукояти 2и тяги 3.Рукоять, тяга, стрела и подвеска образуют шарнирный четырехзвенник (параллелограмм), благодаря которому при повороте рукояти относительно стрелы гидроцилиндром 8подвеска с ковшом совершает плоско-параллельное движение. Дополнительно, управляя положением стрелы с помощью гидроцилиндра 7, можно добиться поступательного движения ковша по подошве штабеля, менее энергоемкого, чем при внедрении ковша в штабель движением всей машины.
Структурно рабочий цикл погрузочного оборудования такой же, как у прямой лопаты, но отличается характером рабочих движений. После описанной выше операции заполнения ковша его поворачивают гидроцилиндром 5 в положение транспортировки. Далее стреловым гидроцилиндром 7 поднимают рабочее оборудование с одновременным вращением поворотной платформы до положения разгрузки. Для разгрузки грунта поворачивают ковш, а рабочее оборудование возвращают на позицию следующего рабочего цикла, осуществляя теми же движениями в обратном порядке.
В ряде случаев, например, при разработке слежавшихся или смерзшихся в штабеле материалов, к ведению погрузочных работ предъявляют те же требования безопасности, что и при работе прямых лопат.
studfiles.net
10. Технология разработки грунтов экскаваторами с рабочим оборудованием «прямая лопата»
Экскаваторы с прямой лопатой, ведут разработку грунта выше уровня своей стоянки. Ковш при этом движется снизу вверх и от экскаватора. Прямой лопатой разрабатывают грунт чаще с погрузкой в транспортные средства.
Ковш прямой лопаты заполняется грунтом при движении вверх вдоль откоса забоя (рис.5.4). Радиус резания прямой лопаты — расстояние от зубьев ковша до оси поворота экскаватора — величина, переменная по высоте.
Наиболее характерные радиусы резания — наибольший и на уровне стояния. Каждый из них имеет два значения: минимальное Rрmin и R0min при втянутом положении рукояти до отказа назад и максимальное Rрmax и Romax при выдвижении рукоятки вперед напорным механизмом. Значение их зависит также от угла наклона стрелы. Наибольший радиус резания экскаватора измеряют на уровне расположения напорного вала.
Рис. 5.4. Рабочее оборудование для земляных работ и рабочие параметры прямых лопат.
Рис. 5.5. Схема забоя и основные рабочие параметры гидравлических экскаваторов
с рабочим оборудованием прямая лопата: максимально возможная высота копания; наибольший и наименьший радиусы копания (резания) на уровне стоянки экскаватора Rрmax и Rрmin; радиус выгрузки Rв; высота выгрузки Hв.
Минимальный радиус резания на уровне стояния прямой лопаты определяется расстоянием от оси экскаватора до точки касания земли зубьями ковша, которая находится примерно на вертикали, проходящей через ось напорного вала.
Высота забоя прямой лопаты имеет три значения: минимальное, нормальное, максимальное.
Минимальная высота забоя соответствует глубине выемки, при которой достигается заполнение ковша за одно черпание. На легких грунтах с малым сопротивлением резанию толщина стружки может быть большая, что позволяет сократить длину набора. В тяжелых грунтах из-за малой толщины стружки минимальная высота забоя будет больше.
В среднем нормальная высота забоя прямой лопаты равна высоте напорного вала hнв над уровнем стояния экскаватора.
Максимальная высота забоя соответствует наибольшей возможной высоте подъема ковша над уровнем стояния экскаватора. При высоте забоя, превышающей наибольшую высоту резания грунта экскаватором, сверху образуется так называемый козырек, особенно в связных и влажных грунтах. При обрушении козырька могут быть нанесены повреждения механизмам и обслуживающему персоналу.
Наибольший радиус выгрузки Rвmax так же как и радиус резания, измеряют при положении зубьев ковша на уровне оси напорного вала (рис. 5.5). Этому же положению соответствует нормальная высота выгрузки Нв, измеряемая от уровня стояния экскаватора до нижней кромки открытого, свободно висящего днища ковша. При максимально поднятом вверх ковше будет наибольшая высота выгрузки Rвmax и соответствующий ей радиус выгрузки Rв.
Разработку грунта ЭО прямая лопата производят лобовым и боковым забоем.
При лобовом забое экскаватор разрабатывает за один проход грунт впереди и сбоку от оси хода, которую совмещают с осью выемки. Разрабатываемый грунт грузят в транспортные средства, располагаемые на уровне подошвы забоя сзади экскаватора. При данном способе разработки угол поворота ЭО к транспортному средству достигает 140…1800, что значительно снижает производительность экскаватора. Поэтому лобовой забой принимают крайне редко, в основном при устройстве въездного пандуса в котлован или при разработке первой (пионерной) проходки.
При боковой разработке экскаватор черпает грунт преимущественно сбоку от оси по ходу экскаватора, который выгружают в транспортные средства, размещаемые либо на уровне стояния экскаватора, либо несколько выше на уступе, причем ось передвижения транспортных средств располагают параллельно оси хода экскаватора. Этот вид разработки возможен при широкой выемке, осуществляемой за два и более прохода.
Разработка боковым забоем предпочтительна, так как обеспечиваются лучшие условия для подъезда и погрузки транспортных средств, уменьшается угол поворота экскаватора, что способствует более производительной работе машин.
Ширина выемки поверху при лобовом забое может колебаться в значительных пределах
Вл = (0,8…1,9) Rр.
При ширине забоя поверху (0,8... 1,5) Rр безрельсовые транспортные средства (самосвалы) подают с одной стороны сзади экскаватора, а при ширине поверху (1,5...1,9) Rр — с обеих сторон экскаватора попеременно, что исключает простои экскаватора при смене транспортных единиц и уменьшает среднее значение угла поворота. В некоторых случаях для сокращения холостых проходов экскаватора и облегчения условий маневрирования автосамосвалов можно применить уширенный до 2,5 Rр лобовой забой с перемещением экскаватора по зигзагу.
При ширине выемки, превышающей 2Rр разработку грунта осуществляют при боковом забое прямых лопат, когда экскаватор черпает грунт преимущественно с одной стороны от оси перемещения и частично впереди себя.
С одной стоянки экскаватор может выбрать грунт впереди себя на длину не больше чем длина напорного хода рукояти — lн.
Шаг экскаватора
Ш = (0,75…0,08) lн.
Чтобы уменьшить недоборы по откосу уступа, не допускают работу экскаватора с предельными значениями радиусов резания. Тогда с учетом длины шага экскаватора расстояние от оси экскаватора до бровки откоса забоя не может быть больше:
Вести разработку грунта в сторону транспортных средств нецелесообразно с поворотом в плане на угол более 45°, так как при большем угле затрудняется набор грунта, который отодвигается в выработанное пространство, за пределы радиуса резания экскаватора.
Наибольшая ширина ленты при боковой разработке
Вл = В1 + В2 – (Rр – R0 max).
При боковом забое транспортные средства могут размещаться не только на уровне стояния экскаватора, на уступе со стороны выработанного пространства, на поверхности земли (при небольшой глубине выемки).
Транспортные средства следует размещать на некотором расстоянии от подошвы откоса (0,5...1,0 м), а также вне зоны обрушения грунта, если они стоят на уступе выше экскаватора.
Среднее значение угла поворота в плане определяется между направлениями на центр тяжести разрабатываемой части грунта в центр тяжести места выгрузки.
Возможность опускания рукояти ниже уровня стояния экскаватора позволяет ему самостоятельно войти в забой без помощи других механизмов. Заглубление происходит с постепенным продвижением вперед при уклоне пути не более 1:8...1:10. Образовавшаяся траншея дает возможность пройти следующую ленту с большей глубиной, так как транспортные средства уже могут перемещаться по дну первой (пионерной) траншеи.
Если проектная глубина выемки значительно превышает максимальную глубину резания экскаватора, то разработку ведут в несколько ярусов, число которых определяется так:
nя = Н/Нр max,
где Н — глубина выемки; Нрmax — максимальная глубина резания принятым экскаватором; nя — число ярусов разработки с округлением до большего целого.
Вход экскаватора в каждый ярус осуществляется прокладкой пионерных траншей, глубина которых определяется условиями погрузки грунта.
В процессе разработки грунта прямой лопатой откосы выемки получают криволинейную форму, что обычно не соответствует заданной форме откоса. Это требует последующих доработок другими механизмами (драглайнами, бульдозерами, экскаваторами и др.).
studfiles.net
4.8. Рабочие параметры экскаватора типа прямая напорная лопата.
К рабочим параметрам экскаватора прямая лопата относятся: радиус и высота черпания и разгрузки (см. рис. 4.13). Эти параметры зависят от длины рукояти и стрелы, угла наклона стрелы, а также от положения пунктов черпания и разгрузки.
Рис.4.13. Рабочие параметры экскаватора прямая лопата.
Радиус черпания (Rч) – горизонтальное расстояние от оси вращения экскаватора до режущей кромки ковша при черпании.
Высота черпания(Нч) – вертикальное расстояние от горизонта установки экскаватора до режущей кромки ковша при черпании.
Радиус разгрузки(Rр) – горизонтальное расстояние от оси вращения экскаватора до оси ковша при разгрузке.
Высота разгрузки(Нр) – вертикальное расстояние от горизонта установки экскаватора до нижней кромки открытого ковша.
5. Экскаваторы-драглайны.
Драглáйны используются на карьерах при бестранспортной системе разработки с укладкой породы в выработанное пространство или на борт карьера в условиях, где длинная стрела дает им преимущества перед мехлопатами, а также при недостаточной несущей способности грунта. Возможна погрузка драглайном горной массы в транспортное средство.
Достоинства экскаваторов-драглайнов заключаются в возможности эффективного черпания ниже горизонта установки, длинной стреле (до 130 % длиннее, чем у мехлопат той же массы) и малом удельном давлении на грунт за счет использования шагающего ходового оборудования. Экскаваторы предназначены для выемки пород I – II категорий крепости (или III – IV категорий после их взрывного рыхления).
5.1. Конструктивная схема экскаватора-драглайна.
Драглайн содержит следующие конструктивные элементы (см. рис.5.1.): ковш 1, тяговый 2, подъемный 3 и разгрузочный 4 канаты, стрелу 5 с головным блоком 6 и пятой 7.
Рис.5.1. Конструктивная схема экскаватора-драглайна
1 – ковш; 2 – тяговый канат; 3 – подъемный канат; 4 – разгрузочный канат;
5 – стрела; 6 – головной блок; 7 – пята; 8 – лебедка подъема;
9 – лебедка тяги; 10 – стреловой полиспаст; 11 – противовес.
Для перемещения ковша служат лебедки подъема 8 и тяги 9. Угол наклона стрелы во время работы обычно не меняется и определяется длиной стрелового полиспаста 10. В задней части поворотной платформы установлен противовес 11. Рабочие движения ковша осуществляются в результате перемещений подъемного и тягового канатов.
Производство шагающих экскаваторов сосредоточено на АО «УЗТМ» и АО «НКМЗ» (см. табл.5.1. и 5.2.) и ГП «Крастяжмаш».
Таблица 5.1.
Техническая характеристика экскаваторов-драглайнов АО «УЗТМ»
| Показатели | Модели экскаваторов | |||||
| ЭШ-20.90 | ЭШ-15.100 | ЭШ-40.100 | ЭШ-65.100 | ЭШ-100.100 | ЭШ-100.125 | |
| Емкость ковша, м3 | 20 | 15 | 40 | 65 | 100 | 100 |
| Длина стрелы, м | 90 | 100 | 100 | 100 | 100 | 125 |
| Угол наклона стрелы, градус | 32 | 32 | 32 | 32 | 35 | 35 |
| Глубина черпания, м | 42,5 | 42,5 | 47 | 46 | 47 | 52 |
| Высота разгрузки, м | 38,5 | 45 | 40 | 38,5 | 43 | 56 |
| Радиус черпания (разгрузки), м | 83 | 91,5 | 94,8 | 97,6 | 97,2 | 118 |
| Рабочая масса, т | 1740 | 1725 | 3320 | 5460 | 10300 | 100000 |
Таблица 5.2.
Техническая характеристика экскаваторов-драглайнов АО «НКМЗ»
| Показатели | Модели экскаваторов | |||||
| ЭШ-6,5.45 | ЭШ-10.70А | ЭШ-14.50 | ЭШ-15.80 | ЭШ-20.65 | ЭШ-10.100 | |
| Емкость ковша, м3 | 6,5 | 10 | 14 | 15 | 20 | 10 |
| Длина стрелы, м | 45 | 70 | 50 | 80 | 65 | 100 |
| Угол наклона стрелы, градус | 35 | 30 | 35 | 30 | 32 | 25 |
| Глубина черпания, м | 22 | 35 | 21 | 40 | 32 | 50 |
| Высота разгрузки, м | 19,5 | 27,5 | 20,5 | 32 | 27 | 42 |
| Радиус черпания (разгрузки), м | 43,5 | 66,5 | 46,5 | 76,5 | 61 | 93,5 |
| Рабочая масса, т | 305 | 767 | 620 | 1120 | 1070 | 1200 |
ГП «Крастяжмаш» осуществляет производство экскаваторов
ЭШ-40.85С и ЭШ-20.90.
studfiles.net
прямая лопата экскаватора — с русского на английский
См. также в других словарях:
Прямая лопата — (a. power shovel; н. Hochschaufel; ф. pelle butte; и. pala excavadora, excavadora) рабочее оборудование одноковшового экскаватора, обеспечивающее копание движением стрелы (иногда и рукояти) c ковшом от машины и вверх, как правило, выше… … Геологическая энциклопедия
ПРЯМАЯ ЛОПАТА — рабочее оборудование одноковшового экскаватора для разработки грунта выше уровня его стоянки с укреплённым на рукояти ковшом, копающим в направлении от экскаватора (см. рис.). Один из наиболее распространённых видов рабочего оборудования,… … Большой энциклопедический политехнический словарь
лопата прямая — Сменное рабочее оборудование одноковшового экскаватора для разработки грунтов выше стоянки экскаватора с движением ковша от экскаватора [Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)] Тематики строит. машины,… … Справочник технического переводчика
Лопата прямая — – сменное рабочее оборудование одноковшового экскаватора для разработки грунтов выше стоянки экскаватора с движением ковша от экскаватора. [Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)] Рубрика термина:… … Энциклопедия терминов, определений и пояснений строительных материалов
ЛОПАТА ПРЯМАЯ — сменное рабочее оборудование одноковшового экскаватора для разработки грунтов выше стоянки экскаватора с движением ковша от экскаватора (Болгарский язык; Български) права лопата (на багер) (Чешский язык; Čeština) výšková lopata (Немецкий язык;… … Строительный словарь
Рабочее оборудование одноковшового экскаватора — Рабочее оборудование одноковшовых экскаваторов совокупность рабочего оборудования одноковшового экскаватора. Эту страницу предлагается объединить с Экскаватор. Пояснение при … Википедия
Механическая лопата — 1) вид одноковшового экскаватора, характеризуемый жёсткой связью между стрелой и ковшом. М. л. выполняется в виде прямой либо обратной лопаты. Прямая лопата (рис., а) применяется для земляных работ в строительстве, для вскрышных и… … Большая советская энциклопедия
Обратная лопата — (a. backhoe, backacting shovel, drag shovel; н. Tiefloffelbagger; ф. pelle retro; и. pala de arrastre, pala mecanica de arrastre) тип рабочего оборудования одноковшового экскаватора, обеспечивающий копание движением стрелы и рукояти c… … Геологическая энциклопедия
Механическая лопата — Прямая электрическая мехлопата на гусеничном ходу с канатно реечным напором с объёмом ковша 55 м³ при погрузке вскрыши на открытых горных работах … Википедия
Одноковшовый экскаватор — Эту страницу предлагается объединить с Экскаватор. Пояснение причин и обсуждение на странице Википедия:К объединению/25 февраля 2012. Обсуждение длится одну неделю (или дольше, если оно идёт медл … Википедия
Гидравлический экскаватор — (a. hydraulic excavator; н. Hydraulikbagger, Baggermaschine mit hydraulischem Antrieb; ф. excavateur hydraulique; и. excavadora hidraulica) самоходная выемочно погрузочная машина, у к рой все виды рабочих органов (основное или сменное… … Геологическая энциклопедия
translate.academic.ru








423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)