 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Механические и электромеханические характеристики двигателей постоянного тока. Механическая характеристика двигателя постоянного тока
Механическая характеристика двигателя постоянного тока
 Полная механическая характеристика двигателя постоянного тока позволяет правильно определиться с основными свойствами электродвигателя, а также проконтролировать их соответствие всем требованиям, предъявляемым на сегодняшний день к машинам или устройствам технологического типа.
Полная механическая характеристика двигателя постоянного тока позволяет правильно определиться с основными свойствами электродвигателя, а также проконтролировать их соответствие всем требованиям, предъявляемым на сегодняшний день к машинам или устройствам технологического типа. Особенности конструкции
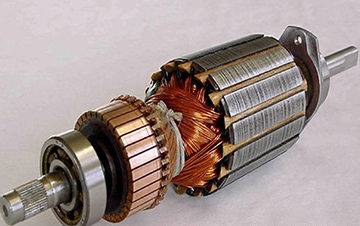
Двигатели постоянного тока представлены вращающимися нагнетательными элементами, которые размещаются на поверхности статически закрепленной станины. Устройства подобного типа получили широкое применение и эксплуатируются при необходимости обеспечивать разнообразие скоростного регулирования в условиях стабильности вращательных движений привода.
С конструктивной точки зрения все виды ДПТ представлены:
- роторной или якорной частью в виде большого количества катушечных элементов, покрытых специальной токопроводящей обмоткой;
- статичным индуктором в виде стандартной станины, дополненной несколькими магнитными полюсами;
- функциональным щеточным коллектором цилиндрической формы, располагающимся на валу и имеющим медную пластинчатую изоляцию;
- статично зафиксированными контактными щетками, используемыми с целью подведения достаточного количества электротока на роторную часть.
Как правило, электрические двигатели ПТ оснащаются специальными щетками графитового и медно-графитного типа. Вращательные движения вала провоцируют замыкание и размыкание контактной группы, а также способствуют искрению.
Определенное количество механической энергии поступает от роторной части к другим элементам, что обусловлено наличием передачи ременного типа.
Принцип функционирования
Синхронные устройства обращенного функционала характеризуются сменой выполнения задач статором и ротором. Первый элемент служит для возбуждения магнитного поля, а второй в этом случае преобразует достаточное количество энергии.
Якорное вращение в условиях магнитного поля наводится при помощи ЭДС, а движение направлено в соответствии с правилом правой руки. Поворот на 180о сопровождается стандартной сменой движения ЭДС.

Принцип действия двигателя постоянного тока
Коллекторы посредством щеточного механизма соединяются с двумя витковыми сторонами, что провоцирует удаление пульсирующего напряжения и вызывает образование постоянных токовых величин, а снижение якорной пульсации осуществляется добавочными витками.
Механическая характеристика
На сегодняшний день эксплуатируются электромоторы ПТ нескольких категорий, имеющие различные виды возбуждения:
- независимого типа, при котором обмоточное питание определяется независимым источником энергии;
- последовательного типа, при котором подключение якорной обмотки выполняется в последовательном направлении с обмоточным элементом возбуждения;
- параллельного типа, при котором роторная обмотка подключается в электрической цепи в параллельном для источника питания направлении;
- смешанного типа, основанном на наличии нескольких последовательных и параллельных обмоточных элементов.

Механическая характеристика двигателя постоянного тока независимого возбуждения ДПТ
Механические моторные характеристики подразделяются на показатели естественного и искусственного вида. Неоспоримые преимущества ДПТ представлены повышенными показателями производительности и увеличенным КПД.
Благодаря особым механическим характеристикам устройства с постоянными токовыми величинами способны легко переносить негативные внешние воздействия, что объясняется закрытым корпусом с уплотнительными элементами, абсолютно исключающими попадание влаги внутрь конструкции.
Модели независимого возбуждения
Моторы ПТ НВ обладают обмоточным возбуждением, подключаемым к отдельному виду источника для электрического питания. В таком случае обмоточная цепь возбуждения ДПТ НВ дополняется реостатом регулировочного типа, а якорная цепь снабжается добавочными или пусковыми реостатными элементами.
Отличительной особенностью такого вида мотора является независимость токового возбуждения от якорного тока, что обуславливается независимым питанием обмоточного возбуждения.

Характеристики электродвигателей с независимым и параллельным возбуждением
Линейная механическая характеристика при независимом типе возбуждения:
- ω — показатели вращательной частоты;
- U — показатели напряжения на эксплуатируемой якорной цепи;
- Ф — параметры магнитного потока;
- Rя и Rд — уровень якорного и добавочного сопротивления;
- Α — константа конструкции движка.
Данным типом уравнения определяется зависимость вращательной скорости мотора к моменту вала.
Модели последовательного возбуждения
ДПТ с ПТВ представляют собой устройство электрического типа с постоянными токовыми величинами, имеющими обмотку возбуждения, последовательно подключенную к якорной обмотке. Данный тип движков характеризуется справедливостью следующего равенства: током, протекающим в обмотке якоря, равным током обмоточного возбуждения, или I=Iв=Iя.

Механические характеристики при последовательном и смешанном возбуждении
При использовании последовательного типа возбуждения:
- n0 — показатели частоты вращения вала в условиях холостого хода;
- Δn — показатели изменения частоты вращения в условиях механической нагрузки.
Смещение механических характеристик вдоль оси ординат позволяет им оставаться в полностью параллельном расположении друг другу, благодаря чему регулирование вращательной частоты при изменении данного напряжения U, подведенного к якорной цепи, становится максимально благоприятным.
Модели смешанного возбуждения
Для смешанного возбуждения свойственно расположение между параметрами устройств параллельного и последовательного возбуждения, чем легко обеспечивается значительность пускового момента и полностью исключается любая возможность «разноса» движкового механизма в условиях холостого хода.
В условиях смешанного типа возбуждения:

Двигатель смешанного возбуждения
Регулировка частоты моторного вращения при наличии возбуждения смешанного типа осуществляется по аналогии с двигателями, имеющими параллельное возбуждение, а варьирование МДС-обмоток способствует получению практически любой промежуточной механической характеристики.
Уравнение механической характеристики
Наиболее важные механические характеристики ДПТ представлены естественными и искусственными критериями, при этом первый вариант сравним с номинальным напряжением питания в условиях полного отсутствия добавочного сопротивления на обмоточных цепях мотора. Несоответствие любому из заданных условий позволяет рассматривать характеристику в качестве искусственной.
ω = Uя/ kФ — ( Rя + Rд)/( kФ)
Это же уравнение может быть представлено в форме ω = ω о.ид. — Δ ω, где:
- ω о.ид. = Uя/kФ
- ω о.ид — показатели угловой скорости холостого идеального хода
- Δ ω = Мэм. [(Rя+Rд)/(kФ)2]— снижение показателей угловой скорости под воздействием нагрузки на вал мотора при пропорциональном сопротивлении цепи якоря
Характеристики уравнения механического типа представлены стандартной устойчивостью, жесткостью и линейностью.
Заключение
Согласно применяемым механическим характеристикам любые ДПТ отличаются конструктивной простотой, доступностью управления и возможностью осуществлять регулировку частоты валового вращения, а также легкостью пуска ДПВ. Кроме прочего, такие устройства могут применяться в качестве генератора и обладают компактными габаритами, что хорошо нивелирует недостатки в виде быстро изнашиваемых графитовых щеток, высокой себестоимости и необходимости обязательно подключать токовые выпрямители.
Видео на тему
proprovoda.ru
Рабочие характеристики
Рабочие характеристики ДПТ параллельного возбуждения малой мощности приведены на рис. 5.8.
Рис. 5.8
Рабочие характеристики двигателя представляют собой зависимости скорости вращения n, потребляемого тока I и мощности P1, момента на валу двигателя M, коэффициента полезного действия η от полезной мощности P2 при неизменном значении напряжения питания Uн = const, тока обмотки возбуждения Iвн=const и отсутствии добавочного сопротивления в якорной цепи Rд я = 0. Они дают возможность судить об эксплуатационных свойствах двигателей и определять наиболее экономичные их режимы работы в условиях производства.
Механическая характеристика двигателя постоянного тока
Механическими характеристиками двигателя называются зависимости установившейся частоты вращения от момента на валу двигателя – n=f1(M) или ω=f2(M).
Характеристики называют естественными, если они получены при номинальных условиях питания (при номинальном напряжении), номинальном возбуждении и отсутствии добавочных сопротивлений в цепи якоря.
Характеристики двигателя называются искусственными при изменении любого из перечисленных выше факторов.
Подставим в уравнение ,выражения для определения тока и ЭДС ДПТ
Ея = СЕnФ,
Механическая характеристика двигателя постоянного тока с независимым и параллельным возбуждением имеет вид:
,
где Rяц = Rя + Rдоб – полное сопротивление цепи якоря, Ом;
RЯ – сопротивление обмотки якоря, Ом;
Rдоб – добавочное сопротивление в цепи якоря, Ом.
Анализируя выражение для построения механической характеристики, видим, что математически это уравнения прямой линии, пересекающей ось скоростей в точке n0, где
n0 = U/(·Ф) – скорость холостого хода.
где Pн – номинальная мощность двигателя, Вт;
ωн – номинальная частота вращения, рад/сек.
Естественная механическая характеристика показана на рис. 5.9.
Для построения естественной механической характеристики (ЕМХ) необходимо найти две точки.
Одна из них определяется из паспортных данных двигателя для номинальных значений nн и Мн:
Мн = Pн/ωн , ωн = π·nн/30 = 0,105·nн,
где Pн – номинальная мощность двигателя, Вт;
ωн – номинальная частота вращения, рад/сек .
Вторая точка соответствует идеальному холостому ходу, когда I = 0 и М=0.
Скорость холостого хода можно найти из следующего уравнения при подстановке паспортных данных двигателя:
.
Регулирование скорости вращения дпт
Существует три основных способа регулирования частоты вращения машин постоянного тока: реостатное регулирование, регулирование изменением магнитного потока, регулирование изменением напряжения сети.
Реостатное регулирование частоты вращения осуществляется путем введения в цепь якоря дополнительных активных сопротивлений – резисторов, т.е. Rяц = (Rя + Rдоб) = var при U = Uн, Ф = Фн. Как видно из уравнения механической характеристики
при изменении величины добавочного сопротивления Rдоб в цепи якоря скорость идеального холостого хода n0 остается постоянной изменяется лишь жесткость характеристики.
Искусственные механические характеристики (ИМХ) при введении добавочного сопротивления в цепь ротора двигателя постоянного тока независимого возбуждения показаны на рис. 5.10.
Регулирование частоты вращения при изменении магнитного потока осуществляется преимущественно за счет ослабления магнитного потока Ф возбуждения двигателя, т.е. за счет уменьшения тока возбуждения iв.
При уменьшении магнитного потока обычно соблюдаются условия: U = Uн; Rдя= 0. В этом случае для скорости идеального холостого хода имеем
, тогда ,
где - скорость холостого хода для искусственной механической характеристики;
- скорость холостого хода для естественной механической характеристики.
Искусственные механические характеристики при уменьшении магнитного потока представлены на рис. 5.11.
Для регулирования частоты вращения двигателя постоянного токанезависимого возбуждения изменением питающего напряжения необходимы регулируемые источники напряжения.
Из уравнения механической характеристики видно, что с регулированием напряжения связано изменение скорости идеального холостого хода n0 = Uн/(·Фн) при сохранении жесткости характеристик. Это позволяет существенно расширить диапазон регулирования. Регулирование частоты вращения идет, как правило, вниз от основной характеристики.Искусственные характеристики при изменении (уменьшении) напряжения будут иметь вид прямых. Механические характеристики двигателя постоянного тока независимого возбуждения при изменении напряжения питания показаны на рис. 5. 12.
20
studfiles.net
Характеристики двигателя постоянного тока
Основной характеристикой двигателя постоянного тока, определяющей его свойства в установившемся режиме, является механическая характеристика
при и.
Уравнение механической характеристики получается из (6.1)
. (6.2)
На рис. 6.42 представлены механические характеристики при различных способах возбуждения. Механическая характеристика двигателя параллельного возбуждения при небольшой размагничивающей реакции якоря () имеет слабо падающий характер (кривая 1).
Если размагничивающая реакция двигателя параллельного возбуждения велика (поток Ф существенно снижается при увеличении нагрузки), то механическая характеристика будет иметь положительный наклон (кривая 1). Такая характеристика, как правило, не позволяет получить установившийся режим.
В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,
,
а электромагнитный момент пропорционален квадрату тока якоря,
.
С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид
. (6.3)
Этому уравнению соответствует кривая 2 (рис. 3), имеющая гиперболический характер. При частота вращения якоря, поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода.
Рис.3
Вместе с тем квадратичная зависимость электромагнитного момента от тока якоря дает важное преимущество двигателям последовательного возбуждения при перегрузках перед двигателями параллельного возбуждения, момент которых является линейной функцией тока . Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе () двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы.
Рис. 4
Механическая характеристика двигателя смешанного возбуждения (кривая 3 рис. 3) занимает промежуточное положение. Обладая близкими с двигателями последовательного возбуждения свойствами при перегрузках, двигатели смешанного возбуждения могут работать и при малых нагрузках, что позволяет осуществить рекуперацию энергии в сеть при (рис. 6.42), так как машина переходит в генераторный режим (). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.
Регулирование частоты вращения двигателей постоянного тока
а) б)
Рис.4
Согласно (6.2), регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока Ф, введения дополнительного сопротивления в цепь якоря иизменения напряжения сети . В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостатав цепи возбуждения. При увеличении сопротивленияпотокФ уменьшается и частота вращения растет. На рис. 4а представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах ,. Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
Регулирование частоты вращения двигателя путем введения в цепь якоря дополнительного сопротивления позволяет изменять частоту вращения вниз от номинальной в широких пределах (рис. 4 б). Но этот способ не экономичен. Полезная мощность двигателя при постоянном моменте пропорциональна частоте вращения (без учета потерь в якоре):
,
а потребляемая из сети мощность от частоты вращения не зависит,
.
Поэтому КПД двигателя пропорционален частоте вращения якоря,
.
Рис.5
Кроме того, при введении дополнительного сопротивления жесткость механической характеристики двигателя снижается, что может привести к ухудшению работы приводного механизма.
Более совершенным способом регулирования частоты вращения вниз является регулирование путем изменения подводимого к двигателю напряжения. На рис. 5 представлены механические характеристики двигателя параллельного возбуждения для трех значений напряжений. Жесткость механических характеристик практически не меняется, поэтому таким способом можно регулировать частоту вращения от номинальной до нуля.
В качестве источников регулируемого напряжения используются генератор постоянного тока (рис. 2, а) либо полупроводниковый выпрямитель (рис. 2, б). Схема с полупроводниковым выпрямителем обладает более высоким быстродействием по сравнению со схемой генератор-двигатель, но уступает по перегрузочной способности. Кроме того, работа полупроводникового преобразователя ухудшает качество электрической энергии сети переменного тока из-за генерации высших гармоник напряжения и тока.
Рассмотренные способы регулирования частоты вращения двигателей параллельного возбуждения применяются и в двигателях смешанного возбуждения.
Регулирование частоты вращения двигателей последовательного возбуждения осуществляется путем изменения тока в последовательной обмотке или напряжения якоряU с помощью шунтирующих реостатов (рис. 6.46).
При шунтировании обмотки возбуждения ток уменьшается и частота вращения якоря растет, а при шунтировании якоря напряжение якоря уменьшается, поэтому частота вращения падает.
Регулирование частоты вращения вверх осуществляется практически при постоянном КПД
.
Верхний уровень частоты вращения ограничивается условиями коммутации.
Регулирование частоты вращения вниз может осуществляться вплоть до нуля, однако КПД этого способа снижается пропорционально напряжению якоря и частоте вращения:
,
где - частота вращения якоря при.
Таким образом, этот способ регулирования так же, как и реостатный способ регулирования частоты вращения двигателя с параллельным возбуждением, является неэкономичным. Он используется лишь в случае двигателей малой мощности.
studfiles.net
Механические и электромеханические характеристики двигателей постоянного тока.
Область применения.
Двигатели постоянного тока подразделяют на двигатели с независимым, последовательным и смешанным возбуждением. Двигатели с независимым возбуждением применяют, как правило, для длительного режима работы, когда требуется широкое регулирование скорости вращения станочного электропривода трубопроката, листо-прокатных станов и т.д. Эти двигатели реже применяются в режиме повторно кратковременной нагрузки, где требуется устойчивая постоянная и полная скорость. Двигатели постоянного тока с независимым возбуждением (ДПТ НВ) широко применяют в системе регулирования генератора-двигателя, в системе ТПД, в системе ШИР-Д (широко-импульсное регулирование-двигатель).
Двигатель последовательного возбуждения применяют для вспомогательных механизмов прокатных станов, для подъемных кранов на приводах хода моста и хода тележки. При их применении на кранах, уменьшается число троллей.
ДПТ ПВ широко используют на транспорте. Постоянный ток здесь удобен тем, что при нем достаточно иметь один троллей, а последовательное возбуждение по той причине, что двигатель при этом не боится больших снижений напряжения, которые имеют место при питании троллем на большие расстояния и лучше выдерживает перегрузку на подъемах и спусках, благодаря тому, что с увеличением тока растет момент.
Двигатель с последовательным возбуждением надежнее, чем другие двигатели постоянного тока, потому что у него обмотка возбуждения выполнена проводом большего сечения, и обмотка возбуждения имеет ничтожно малое напряжение между витками.
Двигатель со смешанным возбуждением применяется редко, работает в механизмах с циклической нагрузкой. Как правило используется динамическое торможение на остановке, работает с большей частотой включения, при которой требуется принудительное охлаждение воздухом продуваемого через двигатель.
Механические и электромеханические характеристики.
ДПТ НВ:
При рассмотрении механических характеристик двигателя считают, что источник питания или сеть бесконечной мощности, ее внутреннее сопротивление близко к нулю, напряжение сети неизменно Uс=const.
Поэтому цепи возбуждения и якоря не зависят друг от друга. Не зависят эти цепи друг от друга и потому, что во многих системах привода для обмотки возбуждения используется отдельный источник питания.
Схема двигателя постоянного тока с независимым возбуждением следующая:
КО – компенсационная обмотка;
ДП – обмотка дополнительных полюсов;
rпя– дополнительное сопротивление, включенное последовательно с якорем;
rпв– дополнительное сопротивление, включенное последовательно с обмоткой возбуждения.
Uся=Е+Iя(rя+rпя)– для якоря;
Uc=Iов(rов+rпв) –для обмотки возбуждения;
Е=КФw;;
Ф – магнитный поток;
w– угловая скорость;
К – конструкторский коэффициент;
Р – число пар полюсов;
N– число активной проводимости релейной ветви;
а – число параллельных ветвей обмоток якоря.
Uся=КФw+Iя(rя+rпя);
- уравнение для скорости двигателя;
Связь между моментом и током М = КФIя
.
Уравнение характеристики представляет из себя прямую линию, которой отсекают от оси ординат отрезок ,w0– скорость идеального холостого хода.
Из выражения механических и электромеханических характеристик видно, что при Ф=constэлектромеханические и механические характеристики представляют собой прямую линию пересекающую ось координат.
;
Из графических выражений характеристику можно выразить следующим образом:
;
Варьируя величинами Uс, rпя, Ф,можно получить семейство кривых, в этих семействах сложно выделить естественную и искусственную электромеханические и механические характеристики. Под естественной понимают характеристику, когдаUс=Uн, Ф=Фн, rпя=0. Все остальные характеристики искусственные.
studfiles.net
Тема 4 Механические и скоростные характеристики двигателя постоянного тока
Основные типы машин постоянного тока
Машины постоянного тока параллельного возбуждения (шунтовые)
Машины постоянного тока последовательного возбуждения (сериесные)
Машины постоянного тока независимого возбуждения
Машины постоянного тока смешанного возбуждения
Основные уравнения и соотношения машин постоянного тока.
Уравнение баланса напряжений якорной цепи
U = E+Iя (Rя + Rд) – для двигателя
Под якорной цепью понимают обмотку якоря дополнительных полюсов, сопротивление перехода щетки коллектора.
Добавочное сопротивление включают последовательно с обмоткой якоря.
Е – ЭДС якоря;
U– напряжение подведенное к цепи якоря;
Iя – ток якоря;
Rя – сопротивление якорной обмотки дополнительных полюсов и перехода щетка – коллектор;
Rд – добавочное сопротивление цеп якоря
2. Уравнение пропорциональности ЭДС и частоты вращения
Е = Се Ф w; Е = Се Ф n; w = pn / 30
Се – коэффициент пропорциональности, включает в себя конструкционные параметры двигателя (якоря)
w- угловая скорость (с-1)
3. Выражение для определения электромагнитного вращающегося момента.
М = См Ф Iя;
M– момент развиваемый двигателем .
4.Скоростная характеристика
U = Ce Ф w + Iя (Rя + Rд)
;
5. Механическая характеристика
М = См Ф Iя
Се=См
Механическая характеристика двигателя постоянного тока независимого возбуждения или шунтового (параллельного) возбуждения
Сопротивление обмотки возбуждения значительно больше сопротивления якорной, следовательно Iв составляет 5…10% токаIя.
Iв = (0,05…0,1) Iя
При номинальном напряжении по ней протекает номинальный ток при отсутствии добавочных сопротивлений.
Характерная особенность двигателей постоянного тока то, что ток в обмотке возбуждения Iв не зависит от тока якоряIя, соответственно от нагрузки машины.
Ток якоря зависит от нагрузки машины.
Р = U Iя от потребляемой мощности
Допускаем, что ток возбуждения и магнитный поток являются постоянными при любой нагрузке.
Iв =const; Ф = const.
Скоростная характеристика
; (y=Rx+b–прямая)
При повышении тока якоря понижается угловая частота
w0 = U / СФточка идеального холостого хода
- пусковой ток якоря при введении добавочного сопротивления
Режим при токе якоря равным ??? называется режимом идеального холостого хода, при этом двигатель постоянного тока имеет частоту вращения w0 = U / СФ.
При пуске w0 =0. Ток зависит лишь от величиныRя иRд. При этом пусковой ток больше номинального токаIп >Iном; Rдя – выбирается таким образом, что бы пусковой ток не превышал номинального более чем в 2,5 раза. При отсутствииRд возникает аварийный режим при которомIя во много раз (10…30) превышает номинальный ток двигателя. Следовательно пуск осуществляют только при введенном добавочном сопротивлении.
Механическая характеристика Механическая характеристика – имеет такой же вид как и скоростная
При повышении момента понижается угловая частота
Различают естественные и искусственные характеристики машин постоянного тока.
Естественными называются характеристики при получении расчетных данных двигателя отсутствуют добавочные сопротивления.
Искусственными называют характеристики полученные при изменении хотя бы одного параметра.
Искусственные характеристики шунтовых двигателей постоянного тока.
При естественной характеристики при изменении нагрузки машины постоянного тока от 0 до номинальной, скорость изменяется в пределах 10%.
Dw- изменение скорости характеризует потери в цепи якоря.
Величина характеризующая отличие номинальной частоты вращения от частоты идеального холостого хода называется скольжением.
Для шунтовых двигателей постоянного тока, S=3…6%, то есть характеристика жесткая.
Механическая характеристика двигателя постоянного тока
(1)
Искусственные характеристики можно получить исходя из механической характеристики (1) изменяя следующие параметры:
напряжение сети
величину добавочного сопротивления
Величину магнитного потокаRд с помощью изменения тока обмотки возбуждения. ИзменяяRд якоря.
Rд2 > Rд1
w0 = U / СФ
При увеличении Rд характеристики становятся мягче.
При w=0 всё напряжение теряется в цепи якоря.
studfiles.net
4.5 Механические характеристики двигателя постоянного тока независимого возбуждения в тормозных режимах
Рис. 4.6 Механические характеристики двигателя постоянного тока независимого возбуждения при различных режимах работы
Выше была рассмотрена работа двигателя независимого возбуждения в двигательном режиме, чему соответствовали механические характеристики, представленные на рис. 4.3 и расположенные в первом квадранте координат осей. Однако этим не исчерпываются возможные режимы работы электродвигателя и его механические характеристики.
Весьма часто в современных электроприводах необходимо быстро и точно остановить механизм или изменить направление его движения. Быстрота и точность, с какой будут проделаны эти операции, во многих случаях определяют производительность механизма, а иногда и качество вырабатываемого продукта. Во время торможения или перемены направления движения (реверса) электродвигатель работает в тормозном режиме на одной из механических характеристик, соответствующих осуществляемому способу торможения. Графическое изображение механических характеристик двигателя независимого возбуждения для разных режимов работы, представлено на рис. 4.6. Здесь, кроме участка характеристик, соответствующих двигательному режиму (квадрант I), показаны участки характеристик в квадрантах II и IV, характеризующие три возможных способа генераторного электрического торможения, а именно:
Торможение с отдачей энергии в сеть (рекуперативное).
Динамическое торможение.
Торможение противовключением.
Каждый тормозной режим является генераторным, так как энергия поступает в машину с вала, преобразуется в электрическую и либо отдается в сеть, либо затрачивается на нагрев элементов якорной цепи, обладающих активным сопротивлением, и рассеивается в окружающую среду.
Рассмотрим подробнее особенности механических характеристик при указанных способах торможения.
1. Торможение с отдачей энергии в сеть (генераторный режим работы параллельно с сетью) осуществляется в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его ЭДС Е больше приложенного напряжения U. Двигатель здесь работает в режиме генератора параллельно с сетью, которой он отдает электрическую энергию, ток при этом изменяет свое направление. Последнее очевидно из равенства
, (4.24)
следовательно, изменяет знак и момент двигателя, т. е. он становится тормозным М=- kФI. Если обозначить тормозной момент через =- М, то уравнение (4.6) при примет следующий вид:
. (4.25)
Первый член в правой части уравнения показывает, что механическая характеристика двигателя независимого возбуждения в этом генераторном режиме при М = 0 проходит через точку, соответствующую угловой скорости идеального холостого хода, как и в случае двигательного режима. Наклон (жесткость) механической характеристики определяется сомножителем второго члена уравнения , который по абсолютному значению (при заданном сопротивленииR) остается неизменным. Следовательно, наклон механической характеристики в рассматриваемом генераторном режиме будет таким же, как и в двигательном. Поэтому графически механические характеристики двигателя в режиме торможения с отдачей энергии в сеть являются продолжением характеристик двигательного режима в область квадранта II (рис. 4.6). Этот способ торможения возможен, например, в приводах транспортных и подъемных механизмов при спуске груза и при некоторых способах регулирования скорости, когда двигатель, переходя к низшим скоростям, проходит значения . Такое торможение является весьма экономичным, поскольку оно сопровождается отдачей в сеть электрической энергии (за вычетом потерь в двигателе), которую двигатель преобразует из механической, поступающей к нему с вала. Но торможение этим способом может быть осуществлено в ограниченных пределах, так как не во всех приводах возможно соблюдение условия.
Необходимо отметить, что чем больше сопротивление в якорной цепи двигателя, тем выше его угловая скорость в генераторном режиме работы параллельно с сетью при том же тормозном моменте (рис. 4.6).
Рис. 4.7 Схема включения двигателя постоянного тока независимого возбуждения при динамическом торможении
2. Динамическое торможение происходит при отключении якоря двигателя от сети и замыкании его на резистор, поэтому иногда его называют реостатным торможением. Обмотка возбуждения при этом должна оставаться присоединенной к сети. Режим динамического торможения также соответствует работе машины в качестве генератора. Однако этот режим отличается от описанного выше торможения с отдачей энергии в сеть. При динамическом торможении, так же как и в предыдущем случае, механическая энергия, поступающая с вала, например, в виде кинетической энергии, запасенной в двигателе и в движущихся элементах приводимого им механизма, преобразуется в электрическую. Однако эта энергия не отдается в сеть, а выделяется в виде теплоты в сопротивлениях цепи якоря.
Вследствие того, что ЭДС двигателя сохраняет при торможении такой же знак, как и в двигательном режиме, а напряжение извне к якорю не прикладывается, ток якоря определяется по формуле
, (4.26)
где R - сопротивление якорной цепи;
Тормозной момент при динамическом торможении, если пренебречь реакцией якоря, может быть выражен равенством
(4.27)
При получим:
При динамическом торможении механическая характеристика двигателя, как это видно из (4.27), представляет собой прямую, проходящую через начало координат. Семейство характеристик динамического торможения при различных сопротивлениях R якорной цепи показано в квадранте II на рис. 4.6. Как видно из этого рисунка, жесткость характеристик уменьшается с увеличением сопротивления якорной цепи.
Динамическое торможение широко используется для останова привода при отключениях его от сети (особенно при реактивном характера момента), при спуске грузов и подъемных механизмах. Оно достаточно экономично, хотя и уступает в этом отношении торможению с отдачей энергии в сеть.
3. Торможение противовключением (генераторный режим работы последовательно с сетью) осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону. Это может происходить, например, в приводе подъемника, когда двигатель включен на подъем, а момент, развиваемый грузом, заставляет привод вращаться в сторону спуска груза. Такой же режим получается и при переключении обмотки якоря (или обмотки возбуждения) двигателя для быстрой остановки или для изменения направления вращения на противоположное.
Графическое изображение механической характеристики для торможения противовключением, когда имеет место, например, так называемый тормозной спуск груза, приведено на рис. 4.8. Как видно из этого рисунка, а также из рис. 4.6, механическая характеристика при торможении противовключением является продолжением характеристики двигательного режима в область квадранта IV. Последнее вытекает из уравнения механической характеристики двигателя, если полагать момент большим момента короткого замыкания и положительным по знаку.
При включении обмоток двигателя для подъема двигатель может быть пущен в ход лишь тогда, когда момент сопротивления груза будет меньше момента(рис. 4.8). В этом случае после включения двигателя в сеть угловая скорость его увеличивается и достигает установившегося значения (точка А)
При этом ток в якоре, как обычно в двигательном режиме, определяется по формуле
С увеличением момента груза угловая скорость двигателя уменьшается соответственно характеристике АВ, и если момент груза будет равен , двигатель остановится. В этом состоянии приЭДС двигателя равна нулю, поэтому ток определяется равенством
Когда момент сопротивления при дальнейшем увеличении груза превысит момент двигателя в неподвижном состоянии, последний начнет вращаться в противоположном направлении и груз станет опускаться. При моменте, равном , будет достигнута установившаяся скорость спуска, соответствующая точкеС на приведенной характеристике. Поскольку якорь теперь вращается в обратную сторону, а направление магнитного потока не изменилось, ЭДС двигателя изменит направление на обратное.
Рис. 4.8 Механическая характеристика двигателя постоянного тока независимого возбуждения при торможении противовключением в случае тормозного спуска
Ток, определяемый уравнением
будет больше, чем в двигательном режиме, и соответственно момент, развиваемый двигателем при торможении противовключением, тоже возрастет.
В таблице на рис. 4.9 стрелками показаны направления напряжения, ЭДС и падения напряжения, а также даны соотношения для токов якоря в случае двигательного режима, короткого замыкания и торможения противовключением при одном и том же значении сопротивления якорной цепи. Для ограничения тока и момента при торможении противовключением приходится включать дополнительный резистор.
Рассмотренное торможение противовключениём при установившейся скорости используется, например, в подъемных устройствам при спуске груза G (рис. 4.9). Как видно из таблицы на рис. 4.9, при торможении противовключением ЭДС двигателя направлена последовательно согласно с напряжением сети, т.е. двигатель работает в генераторном режиме последовательно с сетью, получая механическую энергию с вала и преобразуя ее в электрическую энергию. Потребляется электрическая энергия и из сети. Вырабатываемая двигателем и потребляемая из сети энергия выделяется в виде теплоты в сопротивлениях цепи якоря, поэтому торможение противовключением не экономично, требует больших затрат энергии.
Значительно чаще, чем за счет груза, торможение противовключением получают, изменяя полярность напряжения, подводимого к якорю двигателя при его вращении. В этом случае, так же как и в предыдущем (при спуске груза), ЭДС направлена согласно с напряжением сети, а момент двигателя направлен против вращения якоря. Как было сказано выше, в режиме противовключения необходимо включать дополнительный резистор в якорную цепь для ограничения тока и момента. При этом механические характеристики будут иметь большой наклон к оси абсцисс.
Рис. 4.9 Иллюстрация возможных режимов работы двигателя при подъеме и спуске груза
На рис. 4.10 представлены механические характеристики при торможении противовключением. Здесь при изменении полярности напряжения, подводимого к якорю, двигатель, работавший до этого со скоростью, соответствующей точке А квадранта I, переходит на работу по характеристике ВС (индуктивностью якорной цепи пренебрегаем) в точку В квадранта II. Сохранение неизменной скорости в первый момент переключения двигателя обусловливается механической инерцией электропривода. Под влиянием тормозного момента скорость двигателя уменьшается соответственно характеристике ВС до нулевого значения. При скорости, равной нулю (точка С, рис. 4.10), двигатель в случае торможения для останова, а не реверса, должен быть отключен от сети. Если такого отключения не произойдет, скорость двигателя начнет увеличиваться в обратном направлении (характеристика CD квадранта III). Вместе с изменением направления вращения изменяет направление ЭДС якоря, которая снова в двигательном режиме направлена встречно напряжению сети. Теперь привод вновь работает в двигательном режиме с постоянной угловой скоростью, будучи переведенным на естественную характеристику при противоположном направлении вращения (точка F характеристики FE).
Если еще раз изменить полярность напряжения на выводах якоря, то двигатель вновь перейдет в режим противовключения. Торможение и последующее увеличение угловой скорости двигателя в обратном направлении происходят по характеристике GKL.
Изменение направления вращения двигателя может быть осуществлено двояко. Чтобы получить режим противовключения, можно переключить либо обмотку якоря, либо обмотку возбуждения. Однако переключение обмотки возбуждения практикуется реже, так как вследствие значительной ее индуктивности время торможения возрастает по сравнению с временем торможения при переключении обмотки якоря.
Рис. 4.10 Механические характеристики двигателя постоянного тока независимого возбуждения при торможении противовключением
Электрическое торможение получило в настоящее время широкое применение, особенно в часто пускаемых приводах. Для обеспечения необходимого времени торможения и требуемой точности остановки в практике чаще всего применяется динамическое торможение или торможение противовключением. Для нереверсивных приводов чаще применяют динамическое торможение, так как оно осуществляется по более простой схеме. Для реверсивных приводов, где торможение и пуск двигателя в обратном направлении представляют собой единый процесс, целесообразно применять торможение противовключением, которое дает выигрыш во времени.
studfiles.net
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iвне зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
 Рисунок 1
Рисунок 1Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.

откуда:

На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
electrikam.com









423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)