 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Механическая характеристика трехфазного асинхронного двигателя с фазным ротором. Механическая характеристика асинхронного двигателя амтк
Механическая характеристика асинхронного двигателя
Механическая характеристика представляет геометрическое место рабочих точек при постоянных частоте и напряжении.
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента . Эту характеристику можно получить, используя зависимостьи пересчитав частоту вращения ротора при разных значениях скольжения.
Так как , отсюда.
Участок 1-3 соответствует устойчивой работе, участок 3-4 – неустойчивой работе. Точка 1 соответствует идеальному холостому ходу двигателя, когда . Точка 2 соответствует номинальному режиму работы двигателя, ее координатыи. Точка 3 соответствует критическому моментуи критической частоте вращенияТочка 4 соответствует пусковому моменту двигателя. Механическую характеристику можно рассчитать и построить по паспортным данным.
Асинхронные двигатели имеют жесткую механическую характеристику, т.к. частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
Показать на графике как меняется рабочая точка при изменении нагрузки. Адаптация АД.
Пуск в ход асинхронного двигателя
В момент пуска в ход , т.е. скольжение. Т.к. токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении, пусковой ток двигателя в 5 ÷ 8 раз больше его номинального тока.
Из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент
Для пуска в ход двигателя необходимо, чтобы развиваемый им пусковой момент превышая момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели: уменьшение пускового тока и увеличение пускового момента.
Различают следующие способы пуска в ход асинхронных двигателей: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами.
Регулирование частоты вращения асинхронных двигателей
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
изменением скольжения;
изменением числа пар полюсов;
изменением частоты источника питания.
Изменение скольжения
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение.
Rр3>Rр2>0, Rр1=0.
Как следует из рисунка при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
studfiles.net
Вопрос 17. Устройство, Принцип действия и основные характеристики асинхронного двигателя. Механическая характеристика
Поиск ЛекцийАсинхронный двигатель – это машина переменного тока. Слово «асинхронный» означает неодновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
Рис.1. Устройство асинхронных двигателей
Статор – неподвижная часть машины (рис. 1, а). Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали (рис. 1, б, в). В пазах ротора укладывают обмотку, в зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни (рис. 1, г), соединенные с торцов кольцами из этого же материала («беличья клетка»).
У фазного ротора (см. рис. 1, в) в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Вращающееся магнитное поле это постоянный поток, вращающийся в пространстве с постоянной угловой скоростью.
Необходимыми условиями возбуждения вращающегося магнитного поля являются:
- пространственный сдвиг осей катушек статора,
- временной сдвиг токов в катушках статора.
Оси фаз обмотки смещены в пространстве на угол 120º. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки создают магнитное поле, вращающееся относительно статора с частотой n1, об/мин, которая называется синхронной частотой вращения двигателя:
, (1)
где f1– частота тока сети, Гц;
р – число пар полюсов магнитного поля.
При стандартной частоте тока сети Гц частота вращения поля по формуле (1) и в зависимости от числа пар полюсов имеет следующие значения:
| р | ||||||
| n1, об/мин |
Вращаясь, поле пересекает проводники обмотки ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Частота вращения ротора в двигательном режиме асинхронной машины всегда меньше частоты вращения поля, т.е. ротор «отстает» от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения
, (2)
где n2 – частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой 0 (холостой ход).
Для двигателей с короткозамнутым ротором используют прямой пуск и пуск при пониженном напряжении.
1. Прямой пуск – обмотка статора включается непосредственно в сеть на полное напряжение. Прямой пуск допустим только для асинхронных двигателей с короткозамкнутым ротором малой и средней мощности (до 15-20 кВт). Однако при значительной мощности питающей сети этот способ можно распространить на двигатели большей мощности (примерно до 50 кВт).
2. Пуск при пониженном напряжении. Пусковой ток двигателя пропорционален напряжению на фазах обмотки статора U1, поэтому уменьшение напряжения U1 сопровождается соответствующим уменьшением пускового тока. Однако такой способ приводит к уменьшению начального пускового момента, который пропорционален квадрату напряжения на фазах обмотки статора. Ввиду значительного снижения пускового момента указанный способ пуска применим только при малых нагрузках на валу.
Имеется несколько способов понижения напряжения U1 в момент пуска:
а) при легком пуске асинхронных двигателей средней мощности, которые нормально работают при соединении фаз обмотки статора треугольником, применяют снижение напряжения на зажимах этих фаз переключением их в звезду;
б) при любом типе соединения фаз обмотки статора понизить напряжение можно с помощью реактора (трехфазной индуктивной катушки), включенного последовательно в обмотку статора. Менее экономично снижать напряжение на статоре последовательным включением реостатов, так как они при этом сильно нагреваются и возникают дополнительные потери электрической энергии;
в) для двигателей большой мощности снижать напряжение целесообразно при помощи понижающего трехфазного автотрансформатора. Этот способ лучше предыдущего, но значительно дороже. После того, как ротор двигателя разгонится, и ток спадает, на обмотку статора подается полное напряжение сети.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора. Пусковой реостат снижает величину начального пускового тока и одновременно увеличивает начальный пусковой момент, который может достигнуть величины, близкой к максимальному моменту. По мере разгона двигателя пусковой реостат выводят.
Регулирование- принудительное изменение частоты вращения при постоянной нагрузке на валу. Недостатком асинхронных двигателей является плохая регулировочная способность. Но все же некоторые возможности регулирования имеются.
Из формулы скольжения (2) можно получить выражение частоты вращения ротора асинхронного двигателя
. (3)
Из равенства (3) следует, что изменять частоту вращения можно следующими способами: изменением частоты тока статора f1, числа пар полюсов р и скольжения s. Частоту вращения ротора можно регулировать и изменением напряжения питания U1. Рассмотрим эти способы.
Регулирование изменением частоты тока статора f1. Частотное регулирование асинхронных двигателей является наиболее перспективным в связи с наличием простых и надежных трехфазных тиристорных преобразователей частоты, которые включают между промышленной сетью и асинхронным двигателем. При регулировании частоты f1 скорость двигателя можно плавно изменять так, что ее максимальное значение будет в десятки или сотни раз превышать минимальные. p>
Регулирование изменением числа пар полюсов р. Переключение числа пар полюсов асинхронных двигателей обеспечивает ступенчатое регулирование частоты вращения ротора и отличается экономичностью. Оно применяется в машинах со специальным исполнением обмотки статора, допускающим переключение ее катушек на различное число пар полюсов, а также, когда в пазах магнитопровода статора размещено несколько поочередно включаемых обмоток, выполненных на разное число пар полюсов, например, р = 1 и р = 2. Двигатели с изменением числа пар полюсов называются многоскоростными, промышленностью выпускаются двигатели на две, три и четыре скорости.
Регулирование изменением подводимого напряженияU1. Понижение напряжения вызывает снижение скорости ротора. Уменьшать напряжение U1 можно включением в цепь статора реостатов, автотрансформаторов или регулируемых дросселей. Данный метод применяется только у двигателей малой мощности, так как при уменьшении напряжения уменьшается максимальный момент двигателя, который пропорционален квадрату напряжения. Снижение максимального момента уменьшает запас по устойчивости работы двигателя. Кроме того, диапазон регулирования частоты вращения сравнительно небольшой.
Перечисленные выше способы регулирования применяются для асинхронных двигателей с короткозамкнутым ротором.
У двигателей с фазным ротором частота вращения регулируется изменением скольжения. Для этого в обмотку ротора включают регулировочный реостат. При увеличении сопротивления регулировочного реостата скольжение увеличивается, а частота вращения уменьшается (рис. 2).
Этот способ обеспечивает плавное изменение частоты вращения.
Изменение направления вращения ротора называется реверсированием. Для реверса необходимо поменять местами два провода на зажимах статорной обмотки двигателя.
poisk-ru.ru
Механическая характеристика трехфазного асинхронного двигателя с фазным ротором
Схема подключения двигателя к сети показана на рис. 7.3, а. В отличие от электродвигателя с короткозамкнутым ротором, двигатель с, фазным ротором имеет фазную обмотку на роторе, концы которой выведены на кольца, закрепленные на валу ротора. При замыкании колец накоротко двигатель работает как короткозамкнутый.

Если между кольцами обмотки ротора включить дополнительное активное сопротивление R (как показано на рис. 7.2, а), то механическая характеристика станет более мягкой (рис. 7.2, б, кривая 2), при сохранении той же величины М,(. Чем больше по величине сопротивление R, тем при большем значении s двигатель будет иметь максимальный (критический) момент Мк. При этом изменится и величина пускового момента в сторону увеличения его.
Можно подобрать такое значение R, при котором пусковой момент станет равен критическому. Если в процессе работы сопротивление R не будет выведено, то двигатель будет работать при моменте сопротивления, равном номинальному моменту, с частотой вращения ni и скольжением S. При этом пх будет меньше лном (соответственно Si sHom)- Если для данного случая построить скоростную характеристику, то окажется, что при сопротивлении в цепи ротора Rpnт + R пусковой ток меньше, чем при работе двигателя только с сопротивлением R&л (т. е. при работе двигателя с короткозамкнутым ротором). Таким образом, включая в цепь ротора асинхронного двигателя с фазным ротором различные по величине дополнительные сопротивления, можно увеличить пусковой момент, одновременно уменьшая величину пускового тока, а также получать различную частоту вращения при заданном моменте сопротивления.
Указанные особенности асинхронного двигателя с фазным ротором дают возможность применять его в установках, где требуется большой пусковой момент, небольшой пусковой ток и регулирование частоты вращения.
Асинхронный двигатель с фазным ротором имеет ограниченное применение потому, что у него коэффициент мощности меньше, чем у таких же двигателей с коротко- замкнутым ротором, включение дополнительного сопротивления в цепь ротора вызывает неоправданные потери электрической энергии (на нагрев реостата), двигатель имеет искрящие части.
alyos.ru
21. Механическая характеристика асинхронного двигателя. Формула Клосса.
22. Искусственные механические характеристики асинхронного двигателя при изменении напряжения питания статора.
Асинхронный короткозамкнутый электродвигатель (рисунок 5.1) и АД с фазным ротором (рисунок 5.2) широко распространены в электроприводе благодаря большому ресурсу безотказной работы, высоким показателям в работе, хорошим регулировочным свойствам.
На рисунке 5.3 представлена схема замещения одной фазы электродвигателя с учетом параметров намагничивающего контура с активным rm и индуктивным xm сопротивлениями.
В схеме замещения:
r1 - активное сопротивление фазы статорной обмотки;
r2′ - приведенное к статору активное сопротивление фазы роторной обмотки;
x1 - индуктивное сопротивление фазы статорной обмотки;
x2′ - приведенное к статору индуктивное сопротивление фазы роторной обмотки;
xm - индуктивное сопротивление контура намагничивания.
В соответствии со схемой замещения, роторный ток I2’ имеет значение
Из (5.1) следует, что роторный ток I2’ зависит от скольжения s, т.е. от частоты вращения ротора машины, поскольку
Заметим, что при пуске скольжение s = 1 (текущее значение частоты вращения w = 0), а при частоте вращения w=w0 идеального холостого хода скольжение равно s = 0. Из соотношения следует также, что при пуске роторный ток достигает максимального значения I2к’@ (8¸10)Iном, и его следует ограничивать.
Частота тока ротора fp при значении частоты fc сетевого напряжения fp = fc×s, следовательно, при пуске s=1 и асинхронная машина может быть представлена трансформатором напряжения, поскольку fp=fc =50Гц. По мере разгона двигателя и его работе с номинальным скольжением sн, которое не превышает sн 0,1; падает и частота роторного тока fp = 1..5Гц.
Мощность Р1, потребляемая АД из сети, расходуется на покрытие потерь в контуре намагничивания ∆Рm и в обмотке статора ∆Р1, остаток ее преобразуется в электромагнитную мощность РЭ , которая равна
В свою очередь, , и, решая совместно и находим значение электромагнитного момента
.
Зависимость (5.4) является описанием механической характеристики АД и представляет сложную зависимость момента АД от скольжения. Исследуем ее на экстремум, взяв производную и приравняв ее нулю:
.
Зависимость имеет максимум при критическом значении скольжения, равном
и критическом (максимальном) моменте
Заметим, знак (+) относится к двигательному режиму, а знак (-) к генераторному режиму машины.
Для практических расчетов, удобнее использовать формулу Клосса, полученную из выражений
, где .
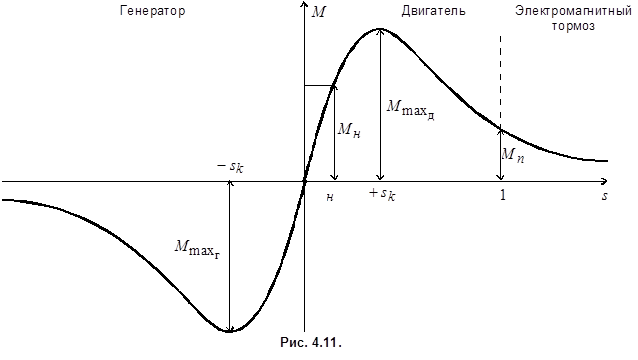
В крупных асинхронных машинах r1 << r2’ , и ε ≈0. Механическая характеристика АД имеет вид, изображенный на рисунке 2.4. Характерные точки характеристики:
1- s=0; М=0, при этом скорость двигателя равна синхронной;
2- s=sном, М=Мном - номинальный
режим работы двигателя;
3- s = sк, М = Мкр.Д - максимальный момент в двигательном режиме;
4- s = 1, М = Мп - начальный пусковой момент;
5- s = -sк, М = Мкр.Г - максимальный момент в генераторном режиме.
Анализируя влияние напряжения питания U на механические характеристики электродвигателя, имеем на основании соотношений (5.6) и (5.7), что критическое скольжениеsкостается постоянным при понижении напряжения, а критический момент Mкр.д уменьшается пропорционально квадрату питающего напряжения (рисунок 5.5).
При понижении сетевого напряжения до значения 0,9×Uном, т.е. на 10% от Uном, критический момент Mкр.д уменьшается на 19%. При снижении питающего напряжения для развития прежнего значения момента двигатель должен работать с большими роторными токами.
При проектировании электродвигателя следует убедиться, что значение пускового (s = 1) и критического моментов (s = sк) при минимально возможном напряжении удовлетворяют требованиям рабочей машины.
Анализируя влияние активного сопротивления, вводимого в роторную цепь, на основании соотношений (5.5)-(5.6), что с увеличением роторного
сопротивления, которое становится равным (r2’ + Rдоб), увеличивается критическое скольжение Sк, но величина критического момента двигателя Mкр.д остается без изменения.
Механические характеристики приведены на рисунке 12. Метод используется для запуска машины, когда на время пуска в роторную цепь включается значительное по величине Rдоб. Диаграмма запуска аналогична диаграмме запуска двигателя постоянного тока независимого возбуждения. Для расчета искусственных механических характеристик при введении сопротивления Rдоб в роторную цепь используется соотношение
где sи и se – скольжения соответственно на искусственной и естественной характеристиках.
Зная величину Rдоб, вводимого в роторную цепь, для тех же значений момента по соотношению (5.8) производится расчет скольжений sи на искусственной характеристике.
Введение активно – индуктивных сопротивлений в роторную цепь машины (рисунок 14) используется для поддержания большего постоянства пускового момента машины по сравнению с естественной характеристикой машины – механическая характеристика машины в области скольжений 1<s<sк представляется более плавной кривой.
Критический момент машины Mкр.д и критическое скольжение sк машины изменяются в соответствии с соотношениями. Введение активных и индуктивных сопротивлений в статорную цепь машины (рисунок ) используется для уменьшения броска пускового тока машины, поскольку напряжение непосредственно на зажимах статора становится функцией тока и по мере уменьшения пускового тока (разгон) указанное напряжение растет и восстанавливается до значения, близкого к Uном. Вывод активных и индуктивных сопротивлений из статорной цепи машины осуществляется релейно - контакторной или бесконтактной схемой.
studfiles.net
Механическая характеристика асинхронной машины
Механической характеристикой называется зависимость  при
при  и
и  . При выводе уравнения механической характеристики будем исходить из базовых соотношений для электромагнитного момента:
. При выводе уравнения механической характеристики будем исходить из базовых соотношений для электромагнитного момента:
 . (4.8)
. (4.8)
Расчет тока ротора  выполним по схеме замещения асинхронной машины (рис. 4.8) методом эквивалентного генератора.
выполним по схеме замещения асинхронной машины (рис. 4.8) методом эквивалентного генератора.
Разомкнем цепь ротора и найдем напряжение эквивалентного генератора:
 ,
,
где  .
.
Для получения сопротивления эквивалентного генератора закоротим источник напряжения  ,
,
 .
.
Полученные соотношения позволяют определить ток ротора:
 .
.
Отсюда, полагая  , получаем действующее значение тока ротора:
, получаем действующее значение тока ротора:
 .
.
С учетом этого выражения формула для электромагнитного момента (4.8) приобретает вид
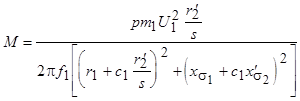 . (4.9)
. (4.9)
Выражение (4.9) удобно для анализа механической характеристики , так как при  и
и  оно содержит только одну переменную s.
оно содержит только одну переменную s.
Исследуем сначала общий характер зависимости :
при 
 ;
;
при 
 ;
;
при 
 ;
;
при 
 .
.
 |
Этим условиям удовлетворяет кривая , представленная на рис. 4.11.
Кривая имеет экстремумы при скольжении  , которое называется критическим скольжением. Это скольжение определяется из условия
, которое называется критическим скольжением. Это скольжение определяется из условия  .
.
Для удобства дифференцирования введем обозначения:  ;
;  ;
; 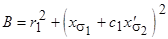 ;
;  . Тогда выражение для электромагнитного момента преобразуется к виду
. Тогда выражение для электромагнитного момента преобразуется к виду
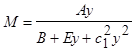 .
.
Дифференцируя это выражение по y, получим
 .
.
Отсюда после преобразований имеем
 .
.
Переходя вновь к скольжению, получим
 . (4.10)
. (4.10)
Подставляя значение  в (4.9), определяем максимальный момент асинхронной машины:
в (4.9), определяем максимальный момент асинхронной машины:
 , (4.11)
, (4.11)
знак «+» относится к двигательному режиму, а «-» - к генераторному режиму.
Для асинхронных машин большой мощности можно считать, что  и
и  , тогда
, тогда
 ; (4.12)
; (4.12)
 . (4.13)
. (4.13)
 |
Отсюда следует, что максимальный момент асинхронной машины прямо пропорционален квадрату напряжения сети  и обратно пропорционален
и обратно пропорционален  .
.
Положение максимума зависит от сопротивления ротора  . На рис. 4.12 показана механическая характеристика асинхронной машины в режиме двигателя. Чем больше , тем больше , при этом, как следует из (4.13), величина
. На рис. 4.12 показана механическая характеристика асинхронной машины в режиме двигателя. Чем больше , тем больше , при этом, как следует из (4.13), величина  остается неизменной.
остается неизменной.
Кратность максимального момента  . Более высокие значения
. Более высокие значения  имеют быстроходные двигатели с малым числом полюсов.
имеют быстроходные двигатели с малым числом полюсов.
Выражение (4.9) позволяет определить пусковой момент двигателя, если подставить в него  :
:
 . (4.14)
. (4.14)
Пусковой момент  так же, как и максимальный , пропорционален квадрату напряжения, но его величина в отличие от зависит от сопротивления . Как следует из (4.10), пусковой момент будет равен максимальному, если
так же, как и максимальный , пропорционален квадрату напряжения, но его величина в отличие от зависит от сопротивления . Как следует из (4.10), пусковой момент будет равен максимальному, если
 . (4.15)
. (4.15)
При упрощенных расчетах механическую характеристику определяют с помощью формулы Клосса:
 . (4.16)
. (4.16)
Для этого необходимо знать две точки на реальной механической характеристике. Их можно получить по каталожным данным для пускового и номинального режимов. В этом случае погрешность формулы Клосса составляет 10-15%.
Похожие статьи:
poznayka.org
Механическая характеристика асинхронного двигателя | el-dvizhok.ru
Механической характеристикой называется зависимость скорости асинхронного двигателя от момента на его валу.
Выражение механической характеристики можно получить из выражения потерь для асинхронного двигателя.
Δp2 = Pэм – P2 = M•ω0 – Mω = M•(ω0 – ω) = M•ω0•s
Pэм – электромагнитная мощность – мощность, передаваемая через воздушный зазор из статора двигателя в ротор. Она может быть электрической и механической.
P2 – полезная мощность, может быть только механическая, и равна произведению момента на валу двигателя на его скорость.
ω0 – ω0•(1 – s) = ω0 – ω0 + ω0•s
Δp2 = 3•(I2’)2•r2’
3•(I2’)2•r2’ = M•ω0•s
M = [3•(I2’)2•r2’] / [ω0•s] (1) – упрощенная формула механической характеристики асинхронного двигателя. Подставим в нее значения тока I2’, определенного по схеме замещения.
M = [3•Uф2•(r2’/s)] / [ω0•[(r1 + r2’/s)2 + xк2]] (2) – выражение полной формулы механической характеристики. Если в нее подставить s от 0 до ±∞, то получиться механическая характеристика асинхронного двигателя.

Как видно из механической характеристики, она имеет два экстремума: первый в области положительных скольжений, второй в области отрицательных скольжений.
dM/ds = 0, можно определить максимальное значение момента, которое называют критическим моментом.
Mmax = Mкр = [3•Uф2] / [2•ω0•(r1 ± √(r12 + xк2))] (3)
sкр = ±(r2’/xк) (4)
Как видно из формулы (3), момент критический будет иметь разные значения, в области скольжений больше нуля будет знак «+», в области скольжений меньше нуля будет знак «–».
Величина критического скольжения одинаковая и в двигательном и в генераторном режимах, только имеет разные знаки.
Если выражение (1) разделить на выражение (2), можно получить, так называемую, формулу Клосса:
M = [2•Mк•(1 + a•sкр)] / [s/sкр + sкр/s + 2•a•sкр] (5)
a – это коэффициент.
a = r1/r2’
Обычно у асинхронных двигателей активное сопротивление статора r1 на порядок меньше активного сопротивления ротора r2’, поэтому с достаточной степенью точности можно записать, что r1=0, и тогда a=0.
M = [2•Mк] / [s/sкр + sкр/s] (6)
Если (5) называется полной формулой Клосса, то (6) называется упрощенной формулой Клосса.
Mкр = [3•Uф2] / [2•ω0•xкр] – упрощенная формула критического момента.
В двигательном режиме скольжение изменяется от 1 до 0.
Рассмотрим анализ формулы Клосса для двигательного режима работы. Как видно из характеристики, ее можно разбить на два участка: s > sкр и s < sкр.
Рассмотрим участок s > sкр, тогда отношением sкр/s можно пренебречь:
M = 2•Mк• sкр / s = A/s
Как видно из получившейся формулы, связь между моментом и скольжением носит гиперболический характер. Это нелинейная не рабочая часть механической характеристики.
Рассмотрим участок s < sкр, тогда отношением s/sкр можно пренебречь:
M = 2•Mк• s / sкр = B•s
На участке s < sкр связь между моментом и скольжением линейная.
Из анализа формулы Клосса видно, что механическая характеристика имеет два участка: линейный рабочий и нелинейный нерабочий.
Для того чтобы определить характеристику двигателя в генераторном режиме, которая имеет также два участка: линейный и нелинейный, достаточно знать значение критического момента в генераторном режиме. Нелинейная область в генераторном режиме не может быть использована из-за больших значений токов и моментов.
λ = Mкр.д./Mн
Критический момент можно определить для двигательного режима по паспортным данным, в них задается отношение Mкр.д./Mн.
Mкр.г. = Mкр.д. • [r1 + √(r12 + xк2)] / [r1 – √(r12 + xк2)]
Похожие материалы:
el-dvizhok.ru











423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)