 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
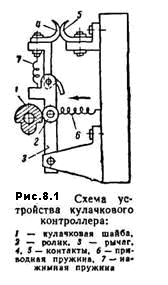
Кулачкового и плоского контроллера. Кулачковый контроллер
1.5.2. Контроллерное управление крановыми двигателями
Схема управления крановыми двигателями проектируются в соответствии с правилами эксплуатации крановых установок и технологическими требованиями, которые являются специфическими для различных видов кранов. К крановым механизмам предъявляются неодинаковые требования. Например, двигатели моста и тележки в ряде случаев не требуют регулирования скорости движения, в то время как подавляющее большинство подъемных устройств не может по технологическим условиям работать без регулирования скорости. Вследствие указанных обстоятельств появляется необходимость в применении для крановых механизмов различных систем электропривода и соответственно управления.
По способу управления крановые электроприводы могут быть разделены на две группы: с силовыми и магнитными контроллерами. Выбор способа управления в зависимости от рабочего режима и мощности двигателя производится в соответствии с табл. 3, где буква К означает силовой контроллер с ручным приводом, а буква М - магнитный контроллер. Рабочие режимы кранового электрооборудования в общем случае понятие, охватывающее условия выбора всех элементов крана, включая электрооборудование. В это понятие входит частота пусков, относительная продолжительность включения (ПВ), годовое и суточное использование механизма, степень ответственности. Все многообразие режимов эксплуатации сведено к четырем: Л - легкий, С - средний, Т - тяжелый, ВТ - весьма тяжелый.
Таблица 3
| Мощность двигателя при ПВ до 40% | Тип контроллера при режиме работы | |||
| Л | С | Т | ВТ | |
| До 10 кВт | К | К | К | М |
| До 30 кВт | К | К | М(К) | М |
| Свыше 30 Квт | К | М(К) | М | М |
В схемах управления электроприводами крановых механизмов на переменном и постоянном токе применяются кулачковые контроллеры соответственно ККТ и ККП. Схемы управления крановыми двигателями могут быть симметричными и несимметричными относительно нулевого положения контроллера или командоконтроллера. Симметричной схемой называется такая, при которой включение двигателя, а следовательно, и его характеристики на положениях рукоятки контроллера, имеющих одинаковый номер, аналогичны. Симметричные схемы применятся обычно на механизмах передвижения, когда требуется, чтобы при одинаковых положениях рукоятки контроллера в случае движения в разные стороны двигатель работал на аналогичных характеристиках. Несимметричные схемы применяются на механизмах подъема, когда при подъеме и спуске груза требуется, чтобы двигатель работал на различных характеристиках.
1.5.3. Схемы непосредственного управления с использованием кулачковых контроллеров
Для крановых механизмов с режимом работы Л и С могут использоваться электроприводы с силовыми кулачковыми контроллерами типа ККТ - 61, ККТ - 62, ККТ - 63. Электропривод этого типа охватывает диапазон номинальных мощностей двигателей 11 - 180 кВт для механизма подъема и 3.5 - 110 кВт для механизма передвижения. На рис. 12 представлена схема кулачкового контроллера ККТ - 61А.
Рис. 12. Схема кулачкового контроллера ККТ – 61А
Контроллер имеет пять фиксированных рабочих положений для каждого направления движения и одно фиксированное нулевое положение. Контроллер обеспечивает ступенчатый пуск, ступенчатое регулирование скорости, реверс и торможение. Включение электродвигателя и реверсирование производится контактами К2, К4, К6, К8. Коммутирование ступеней реостата ротора осуществляется контактами К7, К9 - К12 по несимметричной схеме, когда с целью увеличения числа пусковых характеристик при ограниченном числе коммутирующих контактов на каждой позиции контроллера выводится резистор только в одной фазе. Для остановки двигателя после его отключения предусмотрен тормоз с приводом от электромагнита YВ, подключенного наглухо к статору двигателя.
Рассмотрим работу схемы. Если контроллер установлен в нулевое положение, то контакты блокировки нулевого положения контроллера К1, К5, К3 замкнуты. Нажатием на кнопку SB можно включить линейный контактор КМ1 и через его контакты КМ1 напряжение будет подано на контроллер SA.
Одна фаза С3 питающей сети подводится к статору двигателя М непосредственно, а две фазы С1 и С2 - через контроллер. В первом положении Вперед (Подъем) рукоятки контроллера замкнуты контакты К4, К8 и статор двигателя включается в сеть при полностью введенных сопротивлениях в цепи ротора. В первом положении Назад (Спуск) замкнуты контакты К2 и К6, чем обеспечивается изменение порядка чередования фаз напряжения на зажимах статора. Одновременно со статором двигателя в сеть включается тормозной электромагнит YB, растормаживающий механизм.
В положениях контроллера 2 - 5 Вперед (Подъем) или Назад (Спуск) замыкаются контакты К10, К12, К11, К9, К7 и шунтируются ступени пусковых резисторов в цепи ротора двигателя. Резисторы выводятся по фазам несимметрично (возникающая при этом несимметрия ротора невелика и не оказывает существенного влияния на форму реостатных механических характеристик), что позволяет уменьшить число переключающих контактов контроллера при требуемом числе пускорегулировочных ступеней и получить механические характеристики (рис. 13), обеспечивающие требуемый режим работы механизма. Для механизмов передвижения они обеспечивают реостатное регулирование скорости в небольшом диапазоне и ограничение токов и моментов электропривода при пуске, которое осуществляет оператор, постепенно переставляя контроллер из положения 0 в положение 5 с допустимым темпом. Регулировочные возможности для механизмов подъема ограничены. При спуске грузов получить среднюю пониженную скорость спуска оператор может только периодически накладывая механический тормоз путем установки контроллера в нулевое положение.
Развернутые схемы соединения резисторов для различных положений контроллера приведены на рис. 14.
Рис. 13. Механические характеристики кранового асинхронного двигателя с пятью ступенями регулирования (контроллер ККТ61А)
Рис. 14. Развернутые схемы соединения резисторов для различных положений контроллера ККТ - 61А
Для управления двигателями постоянного тока последовательного возбуждения применяются контроллеры типа ККП - 101 (для механизмов передвижения), которые имеют симметричную схему, и типа ККП – 102 (для механизмов подъема) с несимметричной схемой. Схема контроллера ККП – 102 приведена на рис. 15.
На рис. 16 приведены развернутые схемы включения двигателя последовательного возбуждения, управляемого посредством кулачкового контроллера, при подъеме и спуске грузов. Напряжение к двигателю подводится в обоих случаях через контакты 0Л и 3Л. При подъеме грузов якорь двигателя М, обмотка возбуждения ОВ, обмотка тормозного электромагнита YB и пускорегулирующие резисторы Р1 - Р2, Р2 - Р3, Р3 - Р4, Р4 - Р5, Р5 - Р6 соединены последовательно.
Пуск двигателя на подъем и регулирование скорости осуществляется путем постепенного выключения резисторов в цепи якоря. В режиме спуска грузов используется потенциометрическая схема с параллельным соединением цепей якоря и обмотки возбуждения. Регулирование угловой скорости осуществляется изменением сопротивления в цепи обмотки возбуждения и в общей части схемы.
Каждому положению контроллера соответствует определенная характеристика, имеющая то же цифровое обозначение (рис. 17). Характеристика 1 подъема груза соответствует первому положению контроллера и получается при замкнутом сопротивлении Р1 - Р2 и введенном в цепь якоря Р2 - Р6. На всех положениях спуска последовательно с якорем включено сопротивление Р7 - Р8. При опускании грузов характеристика 1 получается путем введения сопротивления Р1 - Р3 последовательно с сетью, а в цепи обмотки возбуждения дополнительного сопротивления нет. На следующих положениях контроллера последовательно вводятся дополнительные сопротивления в цепь обмотки возбуждения. Причем до положения 5 общее дополнительное сопротивление, включенное последовательно с сетью, остается неизменным (Р1 -Р3), а начиная с положения 5 оно переводится в цепь обмотки возбуждения. В положении 6 обмотка возбуждения включается в сеть независимо от якоря, двигатель имеет в данном случае механическую характеристику, подобную двигателю независимого возбуждения. Это исключает при соответствующем подборе сопротивлений возможность значительного повышения скорости спуска грузов.
Тяжелые грузы спускаются в генераторном режиме (тормозной спуск). При этом контроллерное управление обеспечивает плавное регулирование и низкие скорости опускания грузов. Когда легкие грузы не могут спускаться за счет собственного веса вследствие того, что создаваемый ими момент меньше момента трения, двигатель создает дополнительный момент, преодолевающий совместно с грузом момент трения (силовой спуск).
Рис. 15. Принципиальная схема управления двигателем последовательного возбуждения с кулачковым контроллером ККП - 102
Перевод контроллера при спуске грузов в нулевое положение сопровождается генераторным (динамическим) торможением двигателя с самовозбуждением, так как при отключении двигателя от сети ЭДС якоря создает в обмотке возбуждения ток, который по направлению будет соответствовать протекавшему ранее току и возбудит машину.
Рис. 16. Развернутые схемы включения двигателя последовательного возбуждения, управляемого посредством кулачкового контроллера
Рис. 17. Механические характеристики ДПТ последовательного возбуждения, управляемого посредством контроллера ККП - 102
Если двигатель работал на подъем груза, то перевод контроллера в нулевое положение не вызовет динамического торможения, хотя соответствующая цепь будет создана. В этом случае при замыкании цепи машина будет размагничена.
Расчет механических и электромеханических характеристик ДПТ
последовательного возбуждения, управляемого посредством
контроллера ККП - 102
, ,,,,,,
1. Двигательный режим работы ДПТ последовательного возбуждения (первый квадрант подъем груза).
Схема включения двигателя имеет вид
Расчет искусственных характеристик можно вести различными методами:
А. Если известны естественная электромеханическая характеристика двигателя и зависимость , то по выражению
рассчитывают электромеханическую характеристику, а пользуясь зависимостью механическую характеристику.
В. Если естественная характеристика двигателя последовательного возбуждения не известна, то пользуются зависимостью .
Тогда методика расчета реостатных характеристик следующая:
– задаемся рядом значений , ;
– по известной зависимости для каждогоопределяем соответствующее значение, при;
– определяем значение скорости
;
– определяем значение момента
.
2. Динамическое торможение с самовозбуждением ДПТ последовательного возбуждения (четвертый квадрант спуск груза).
Схема включения двигателя имеет вид
Методика расчета (на основании кривой ):
– задаемся рядом значений
;
– по известной зависимости для каждого определяем соответствующее значение
при величина;
– определяем значение скорости
;
– определяем значение момента
.
3. Характеристики ДПТ в режиме спуска (обмотка возбуждения включена параллельно) – первый и второй квадранты.
Рис. 18
Методика расчета:
– задаемся рядом значений ,
;
– определяем
,
– определяем ток в обмотки возбуждения
;
– по известной зависимости для каждогоопределяем соответствующее значение
при величина;
– определяем ток якоря
;
– определяем значение скорости (знак «+» соответствует генераторному режиму работы, знак «-» – двигательному)
– определяем значение момента
.
Рис. 19
studfiles.net
Кулачковый контроллер - Большая Энциклопедия Нефти и Газа, статья, страница 1
Кулачковый контроллер
Cтраница 1
Кулачковые контроллеры способны осуществлять до 600 коммутационных операций в час. [1]
Кулачковые контроллеры имеют фиксирующий механизм, благодаря которому остановка вала кулачкового барабана происходит в положении, соответствующем полному замыканию или полному размыканию контактов. [3]
Кулачковые контроллеры ( рис. 124) включают в себя контактные элементы и вал с кулачковыми шайбами. Замыкание и размыкание подвижного и неподвижного контактов происходит с помощью кулачковых шайб вала и пружин контактных элементов. [5]
Кулачковые контроллеры более совершенны, они не имеют указанного недостатка барабанного контроллера. Кулачковый контроллер состоит из вала с маховиком; на вал насажены кулачки ( рис. 16), по которым скользят ролики рычагов контактов. [6]
Кулачковый контроллер ( рис. 8 - 23) выполнен следующим образом: на вращающемся валу укреплены кулачковые шайбы 3 фасонного профиля. Шайбы с квадратным валом вращаются при помощи штурвала. [8]
Кулачковые контроллеры и командоаппараты монтируют подобно пусковым реостатам с масляным охлаждением. Контроллер или командоаппарат устанавливают непосредственно на опорной поверхности пли через дополнительную конструкцию по отвесу и уровню так, чтобы высота штурвала над полом была не более 1100 мм. При их установке следует обеспечить хороший обзор рабочего места н удобство управления. [9]
Кулачковые контроллеры применяют для управления крановым электрооборудованием. Они более просты и совершенны, чем барабанные, и отличаются большей отключающей способностью ( до 600 отключений в час) из-за особой конструкции контактов ( рис. 8, а и б) и наличия дугогасительных устройств. [11]
Кулачковые контроллеры имеют значительные преимущества по сравнению с плоскими и барабанными. Они допускают до 600 переключений в час, могут работать при больших токах, обладают высокой коммутационной способностью. [12]
Кулачковые контроллеры имеют значительные преимущества по сравнению с плоскими. Они допускают до 600 переключений в час, могут работать при больших токах, обладают высокой коммутационной способностью. [13]
Кулачковый контроллер ( рис. 33) состоит из неподвижной и вращающейся частей. [14]
Кулачковый контроллер ( рис. 46) состоит из верхнего и нижнего литых чугунных или алюминиевых оснований, между кото - рыми встроен и вращается на подшипниках качения стальной вал 1 с закрепленными на нем фасонными шайбами. Вырезы в шайбах соответствуют моментам включения контактов цепи. Кроме контактов главной цепи, включаемых в Цепь статора или ротора электродвигателя, кулачковые контроллеры имеют кулачковые контакты для цепи управления. Цепью управления называется вспомогательная цепь, в которую включены катушки аппаратов управления. Так как в цепи управления проходят небольшие токи, то элементы этих контактов имеют меньшие размеры и более простое устройство. [15]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Силовые контроллеры: назначение, устройство, технические характеристики
 Контроллером именуется многоступенчатый, многоцепной аппарат с ручным управлением, созданный для конфигурации схемы главной цепи мотора либо цепи возбуждения. Не считая того, контроллеры также используются для конфигурации сопротивлений, включенных в эти цепи. По собственному конструктивному выполнению контроллеры делятся на барабанные, кулачковые и плоские.
Контроллером именуется многоступенчатый, многоцепной аппарат с ручным управлением, созданный для конфигурации схемы главной цепи мотора либо цепи возбуждения. Не считая того, контроллеры также используются для конфигурации сопротивлений, включенных в эти цепи. По собственному конструктивному выполнению контроллеры делятся на барабанные, кулачковые и плоские.
Силовые контроллеры являются комплектными устройствами для обеспечения включения цепей обмоток электродвигателей по заблаговременно данной программке, заложенной в конструкции контроллера. Простота конструкции, безотказность в работе и малые габариты — главные достоинства силовых контроллеров.
При правильном выборе и использовании силовых контроллеров в согласовании сих коммутационными способностями контроллеры являются надежными и комфортными в эксплуатации комплектными устройствами управления крановыми электроприводами, потому что в этих устройствах стопроцентно исключены нарушения данной программки, а включениеи отключение, зависящие от действий машиниста, обеспечивают 100 %-ную готовность привода к работе.Но к недочетам этих комплектных устройств можно отнести низкую износостойкость и коммутационную способность, также отсутствие автоматического запуска и торможения.
Барабанные контроллеры
На рис.1 показан контактный элемент барабанного контроллера. На валу 1 укреплён сегментодержатель 2 с подвижным контактом в виде сектора 3. Сегментодержатель изолирован от вала изоляцией 4. Недвижный контакт 5 размещен на изолированной рейке 6. При вращении вала 1 сектор 3 набегает на недвижный контакт 5, чем осуществляется замыкание цепи. Нужное контактное нажатие обеспечивается пружиной 7. Повдоль вала размещено огромное число контактных частей. На одном валу устанавливается ряд таких контактных частей. Сегментодержатели примыкающих контактных частей можно соединять меж собой в разных нужных композициях. Определенная последовательность замыкания разных контактных частей обеспечивается различной длиной их частей.

Рис.1. Контактный элемент барабанного контроллера.
Кулачковые контроллеры
У кулачковых контроллеров размыкание и замыкание контактов обеспечивается смонтированными на барабане кулачками, поворот которых осуществляется при помощи ручки маховика либо педали и могут коммутировать от 2 до 24 электронных цепей. Кулачковые контроллеры делятся по количеству коммутируемых цепей, виду привода, диаграммам замыкания контактов.

В кулачковом контроллере переменного тока (рис.2) перекатывающийся подвижный контакт 1 имеет возможность крутиться относительно центра О2, размещенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра O1. Контакт 1 замыкается с недвижным контактом 3 и соединяется с выходным контактом при помощи гибкой связи 4. Замыкание контактов 1,3 и нужное контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 5 на контактный рычаг. При всем этом сжимается пружина 5 и контакты1, 3 размыкаются. Момент включения и отключения контактов находится в зависимости от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет прирастить число включений в час до 600 при ПВ-60 %.
В контроллер входят два комплекта контактных частей / и //, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко уменьшить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала.
Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В их инсталлируются только дугостойкие асбестоцементные перегородки 10. Контроллеры неизменного тока имеют дугогасительное устройство, аналогичное используемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на ручку и передаче этого воздействия через кулачковую шайбу, включение происходит при помощи силы пружины 5 при соответственном положении ручки. Потому контакты удается развести даже в случае их сваривания. Недочет конструкции заключается в большенном моменте на валу за счет включающих пружин при значимом числе контактных частей. Нужно отметить, что вероятны и другие конструктивные решения привода контактов контроллера.
Рис.2. Кулачковый контроллер.
Плоские контроллеры
Для плавного регулирования поля возбуждения больших генераторов и для запуска в ход и регулирования частоты вращения огромных движков нужно иметь огромное число ступеней. Применение кулачковых контроллеров тут нецелесообразно, потому что огромное число ступеней ведет к резкому возрастанию габаритов аппарата. Число операций в час при регулировании и пуске невелико (10—12). Потому особенных требований к контроллеру исходя из убеждений износостойкости не предъявляется. В данном случае обширное распространение получили плоские контроллеры.
На рис.3 показан вид плоского контроллера для регулирования возбуждения. Недвижные контакты 1, имеющие форму призмы, укреплены на изоляционной плите 2, являющейся основанием контроллера. Размещение недвижных контактов по полосы дает возможность иметь огромное число ступеней. При той же длине контроллера число ступеней может быть увеличено методом внедрения параллельного ряда контактов, сдвинутого относительно первого ряда. При сдвиге на полшага число ступеней умножается.
Подвижный контакт выполнен в виде медной щетки. Щетка размещается в траверсе 3 и изолируется от нее. Нажатие создается цилиндрической пружиной. Передача тока с контактной щетки 4 на выходной зажим осуществляется при помощи токосъемной щетки и токосъемной шипы 5. Контроллер рис.3 может сразу создавать переключения в 3-х независящих цепях. Траверса перемещается при помощи 2-ух винтов 6, приводимых в движение вспомогательным движком 7. При наладочных работах перемещение траверсы вручную делается ручкой 8. В конечных положениях траверса повлияет на конечные выключатели 9, которые останавливают движок.
Для того чтоб иметь возможность четкой остановки контактов на хотимой позиции, скорость движения контактов берется малой: (5—7)10-3 м/с, а движок обязан иметь торможение. Тонкий контроллер может иметь и ручной привод.

Рис.3. Тонкий контроллер.
Достоинства и недочеты различных типов контроллеров
Барабанные контроллеры
 Вследствие малой износостойкости контактов допустимое число включений контроллера в час превосходит 240. При всем этом мощность запускаемого мотора приходится снижать до 60% номинальной, из-за чего такие контроллеры используются при редчайших включениях.
Вследствие малой износостойкости контактов допустимое число включений контроллера в час превосходит 240. При всем этом мощность запускаемого мотора приходится снижать до 60% номинальной, из-за чего такие контроллеры используются при редчайших включениях.
Кулачковые контроллеры
В контроллере употребляется перекатывающийся линейный контакт. Благодаря перекатыванию контактов дуга, загорающаяся при размыкании, не повлияет на поверхность контакта, участвующую в проведении тока в стопроцентно включенном состоянии.
Малый износ контактов позволяет прирастить число включений в час до 600 при длительности включения 60%.
Конструкция контроллера имеет последующую особенность: выключение происходит за счет выступа кулачка, а включение за счет силы пружины. Благодаря этому контакты удается развести даже в случае их сваривания.
Недочетом этой системы является большой момент на валу, создаваемый включающими пружинами при значимом числе контактных частей. Вероятны и другие конструктивные дизайна привода контактов. В одном из их контакты замыкаются под действием кулачка и размыкаются под действием пружины, в другом и включение и отключение совершается кулачком. Но они используются изредка.
Плоские контроллеры
Плоские контроллеры получили обширное распространение для плавного регулирования поля возбуждения больших генераторов и для запуска в ход и регулирования частоты вращения огромных движков. Потому что нужно иметь огромное число ступеней, то применение кулачковых контроллеров тут нецелесообразно, так как огромное число ступеней ведет к резкому возрастанию габаритов аппарата.
При размыкании меж подвижным и недвижным контактом возникает напряжение, равное падению напряжения на ступени. Для того чтоб не появлялась дуга, допустимое падение напряжения на ступени берется от 10 В (при токе 200 А) до 20 В (при токе 100 А). Допустимое число включений в час определяется износом контактов и не превосходит обычно 10—12. Если напряжение на ступени равно 40—50 В, то применяется особый контактор, который перемыкает примыкающие контакты во время перемещения щетки.
В случае, когда нужно создавать коммутацию цепи при токах 100 А и поболее с частотой включений в час 600 и выше, применяется система, состоящая из контактора и командоаппарата.
Применение силовых контроллеров в крановом электроприводе
Для управления электродвигателями крановых устройств используют контроллеры последующих серий: ККТ-60А на переменном токе и контроллеры пультов DVP15и UP35/I. Контроллеры этих серий изготовляют в защищенных корпусах с крышками и степенью защиты от наружной среды 1Р44.

Механическая износостойкость силовых контроллеров составляет (3,2-5) х 10 млн. циклов ВО. Коммутационная износостойкость находится в зависимости от силы коммутируемого тока. При номинальной силе тока она составляет около 0,5х 10 млн. циклов ВО, а при силе тока 50 % номинальной можно получить износостойкость1х 10 млн. циклов ВО.
Контроллеры ККТ-60А имеют номинальную силу тока 63 А при режиме работы ПВ = 40 %, но их коммутационная способность очень низкая, что ограничивает внедрение этих контроллеров в томных критериях коммутации. Номинальное напряжение контроллеров переменного тока 38G В, частота 50 Гц.
elektrica.info
Кулачковый контроллер - Большая Энциклопедия Нефти и Газа, статья, страница 3
Кулачковый контроллер
Cтраница 3
Кулачковый контроллер представляет собой набор контактных элементов, помещенных в стальной кожух, подобный корпусу барабанного контроллера. [31]
Кулачковые контроллеры ( рис. 17 - 9) допускают до 600 включений в час. Они могут выполняться на большие токи по сравнению с барабанными. Поэтому они обладают высокой отключающей способностью. Управление контактами осуществляется фигурным кулачком. Передача движения через вращающийся ролик обеспечивает малый износ. [32]
Кулачковые контроллеры КВ1 02, предназначенные для механизмов подъема, применяются исключительно для управления двигателями последовательного возбуждения. Это объясняется тем, что двигатели последовательного возбуждения имеют большую перегрузочную способность, благоприятную естественную механическую характеристику на подъеме, при котором имеет место автоматическое повышение скорости при операциях с легкими грузами и ненагруженным крюком. Кроме того, схема управления с такими двигателями позволяет получить надежное электрическое торможение и требует минимального числа троллеев для подвода тока. [34]
Кулачковый контроллер заменен на более компактный угольный командоконтроллер КУБ-160 и магнитные контакторы серии КМ. [35]
Кулачковые контроллеры независимо от типа состоят из трех основных частей: корпуса, вала с кулачковыми шайбами и коммутационных контактных элементов. Контактный элемент имеет изолятор с неподвижным контактом, рычаг с подвижным контактом на одном и роликом на другом конце и пружины, обеспечивающие замыкание контактов. Ролик скользит по профилю кулачковой шайбы. Поворот кулачковых шайб осуществляется с помощью рукоятки или педали, насаженных на выходной конец вала, причем коммутационные контактные элементы разомкнуты до тех пор, пока ролик рычага находится на гребне кулачковой шайбы. Когда ролик входит во впадины кулачковой шайбы, под действием пружины, поворачивающий рычаг с подвижным контактом до его соприкосновения с неподвижным, происходит включение. [36]
Кулачковые контроллеры ( рис. 17 - 12) допускают до 600 включений в час. Они могут выполняться на большие токи по сравнению с барабанными. Поэтому они обладают высокой отключающей способностью. Управление контактами осуществляется фигурным кулачком. Передача движения через вращающийся ролик обеспечивает малый износ. [37]
Кулачковые контроллеры допускают до 600 включений в час. Они могут выполняться на большие токи по сравнению с барабанными. Поэтому они обладают высокой отключающей способностью. Управление контактами осуществляется фигурным кулачком. Передача движения через вращающийся ролик обеспечивает малый износ. [38]
Кулачковые контроллеры собираются на литых или штампованных основаниях и могут выполняться с числом кулачков до 15 - 16 или 30 - 32 при двух кулачках на контакт. Для удержания рукоятки в установленном положении применяется фиксатор положения. [39]
Кулачковые контроллеры состоят из трех основных частей: корпуса, вала с профилированными кулачками и контактных элементов. [41]
Кулачковый контроллер - комплект элементов контакторного типа, которые замыкаются и размыкаются кулачковыми шайбами, посаженными на вал контроллера. [42]
Кулачковый контроллер состоит из корпуса, в который встроены кулачковый барабан и рейка с набором кулачковых элементов. Кулачковый барабан представляет собой стальной вал с закрепленными на нем пластмассовыми фасонными шайбами, который вращается в шариковых подшипниках. Кулачковые элементы главного тока и цепи управления закрепляются на стальной рейке, которая в свою очередь крепится к чугунным основаниям корпуса. При проворачивании кулачкового барабана с помощью насаженного на него штурвала производится, замыкание и размыкание кулачковых элементов. [43]
Кулачковые контроллеры, в которых переключения осуществляются отдельными выключателями ( контакторными элементами), замыкаемыми общим распределительным кулачковым валом, совмещают элементы как барабанных, так и контакторных контроллеров. Рассчитанные на тяжелый режим работы при числе включений до 600 в час, они применяются в случаях, когда мощность электродвигателей и число включений превышают разрывные мощности и допустимое число включений для барабанных контроллеров. Отсутствие постоянно трущихся контактных плоскостей и наличие искрогашения уменьшают в них износ, истирание и обго-рание контактов. Они надежны и требуют меньшего ухода, чем барабанные контроллеры. [44]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Кулачкового и плоского контроллера.
Контроллером называется многоступенчатый, многоцепной аппарат с ручным управлением, предназначенный для изменения схемы главной цепи двигателя или цепи возбуждения. Кроме того, контроллеры также применяются для изменения сопротивлений, включенных в эти цепи. По своему конструктивному исполнению контроллеры делятся на барабанные, кулачковые и плоские.
Барабанные контроллеры.На рис.1 показан контактный элемент барабанного контроллера. На валу 1 укреплён сегментодержатель 2 с подвижным контактом в виде сегмента 3. Сегментодержатель изолирован от вала изоляцией 4. Неподвижный контакт 5 расположен на изолированной рейке 6. При вращении вала 1 сегмент 3 набегает на неподвижный контакт 5, чем осуществляется замыкание цепи. Необходимое контактное нажатие обеспечивается пружиной 7. Вдоль вала расположено большое число контактных элементов. На одном валу устанавливается ряд таких контактных элементов. Сегментодержатели соседних контактных элементов можно соединять между собой в различных необходимых комбинациях. Определенная последовательность замыкания различных контактных элементов обеспечивается различной длиной их сегментов.
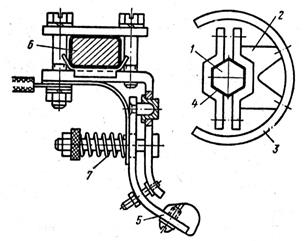
Рис.1. Контактный элемент барабанного контроллера.
Кулачковые контроллеры. В кулачковом контроллере переменного тока (рис.2) перекатывающийся подвижный контакт 1 имеет возможность вращаться относительно центра О2, расположенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра O1. Контакт 1 замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1,3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 5 на контактный рычаг. При этом сжимается пружина 5 и контакты /, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %. В контроллер входят два комплекта контактных элементов / и //, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала. Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на рукоятку и передаче этого воздействия через кулачковую шайбу, включение происходит с помощью силы пружины 5 при соответствующем положении рукоятки. Поэтому контакты удается развести даже в случае их сваривания. Недостаток конструкции заключается в большом моменте на валу за счет включающих пружин при значительном числе контактных элементов. Надо отметить, что возможны и другие конструктивные решения привода контактов контроллера.

Рис.2. Кулачковый контроллер.
Плоские контроллеры. Для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей необходимо иметь большое число ступеней. Применение кулачковых контроллеров здесь нецелесообразно, так как большое число ступеней ведет к резкому возрастанию габаритов аппарата. Число операций в час при регулировании и пуске невелико (10—12). Поэтому особых требований к контроллеру с точки зрения износостойкости не предъявляется. В этом случае широкое распространение получили плоские контроллеры.
На рис.3 показан общий вид плоского контроллера для регулирования возбуждения. Неподвижные контакты 1, имеющие форму призмы, укреплены на изоляционной плите 2, являющейся основанием контроллера. Расположение неподвижных контактов по линии дает возможность иметь большое число ступеней. При той же длине контроллера число ступеней может быть увеличено путем применения параллельного ряда контактов, сдвинутого относительно первого ряда. При сдвиге на полшага число ступеней удваивается. Подвижный контакт выполнен в виде медной щетки. Щетка располагается в траверсе 3 и изолируется от нее. Нажатие создается цилиндрической пружиной. Передача тока с контактной щетки 4 на выходной зажим осуществляется с помощью токосъемной щетки и токосъемной шипы 5. Контроллер рис.3 может одновременно производить переключения в трех независимых цепях. Траверса перемещается с помощью двух винтов 6, приводимых в движение вспомогательным двигателем 7. При наладочных работах перемещение траверсы вручную производится рукояткой 8. В конечных положениях траверса воздействует на конечные выключатели 9, которые останавливают двигатель. Для того чтобы иметь возможность точной остановки контактов на желаемой позиции, скорость движения контактов берется малой: (5—7)10-3 м/с, а двигатель должен иметь торможение. Плоский контроллер может иметь и ручной привод.

Рис.3. Плоский контроллер.
Преимущества и недостатки разных типов контроллеров.
Похожие статьи:
poznayka.org
Силовой кулачковый контроллер
Количество просмотров публикации Силовой кулачковый контроллер - 132
Устройство силового кулачкового контроллера показано на рис.9.34.
Рис. 9.34. Силовой кулачковый контроллер:
а – общий вид; б – контактное устройство;
1 – дугогасительный рог; 2 – полюсные наконечники; 3 – асбоцементная камера;
4 – подвижный контакт; 5 – суппорт; 6 – пружина контакта; 7 – рычаг; 8 – ролик;
9 – пружина; 10 – дугогасительная катушка; 11 – сердечник катушки; 12 – непод-
вижный контакт
С маховиком контроллера в виде штурвала ( рис. 9.34, а, нижняя проекция ) механи
чески связан вал, на котором смонтированы кулачковые шайбы с переменным профилем
( отсюда название этого типа контроллера – кулачковый ).
Против каждой кулачковой шайбы на неподвижной изоляционной панели располо-
жены контактные устройства ( рис. 9.34, б ).
Контактное устройство представляет собой рычаг 7, на одном конце которого на оси закреплен подпружиненный суппорт 5 с подвижным контактом 4. На втором конце рычага размещён ролик 8, находящийся во впадине шайбы. На данный конец рычага давит пружина 9, заставляя подвижный контакт 4 надавливать на неподвижный контакт 12.
При повороте маховика ролик 8 выходит из впадины шайбы и попадает на её вы-
ступ. При этом шайба надавливает на ролик, заставляя рычаг повернуться по часовой стрелке вокруг оси. Верхний край рычага сжимает пружину 9, а нижний отводит подвиж-
ный контакт 4 от неподвижного 12, контакты размыкаются.
Углы поворота вала с шайбами фиксируются в определенных положениях с помо-
щью храпового устройства. Профиль кулачковых шайб определяет программу управления электроприводом – пуск, первая скорость, вторая скорость, остановка и т.п.
Дугогасительное устройство постоянного тока состоит из последовательной искро
гасительной катушки 10, сердечника катушки 11, полюсных наконечников 2, дугогаситель
ного рога 1 и асбестоцементной камеры 3.
На переменном токе дугогашение обеспечивается установкой между кулачковыми элементами асбестоцементных перегородок, которые препятствуют перекрытию дугой рядом расположенных полюсов аппарата.
Контактные устройства цепей управления устроены и работают аналогичным обра
зом, но их контакты – не пальцевые, а мостиковые и без дугогашения.
referatwork.ru
Кулачковый контроллер - Большая Энциклопедия Нефти и Газа, статья, страница 4
Кулачковый контроллер
Cтраница 4
Кулачковые контроллеры предназначаются для управления двигателями большей мощности и рассчитаны на большее число включений, чем контроллеры барабанные. [46]
Кулачковый контроллер ( рис. 6 - 1 а) состоит из набора секций ( рис. 6 - 1 6), содержащих контактную систему и кулачки. Секции смонтированы в металлическом кожухе. Неподвижный контакт / крепится к колодке 2 из изоляционного материала. [47]
Кулачковые контроллеры и командоаппараты монтируют подобно пусковым реостатам с масляным охлаждением. Контроллер или командоаппарат устанавливают или непосредственно на опорной поверхности или через дополнительную конструкцию по отвесу и уровню так, чтобы высота штурвала над полом была не более 1100 мм. При их установке, особенно на кранах, следует обеспечить крановщику хороший обзор рабочего места и удобства управления. [48]
Кулачковый контроллер ( рис. 1 - 20 а, б) представляет собой аппарат, собранный в стальном кожухе со съемной передней стенкой. При повороте маховичка / происходит вращение фасонных шайб 2, установленных на - главном вал-ике, соединенном с маховичком. [50]
Кулачковые контроллеры применяют для управления двигателями больших мощностей. Число контактных элементов в зависимости от схемы может достигать 15 и более. [51]
Кулачковые контроллеры ККТ-61 и ККТ-62 имеют по пять положений маховичка в каждую сторону от нулевого положения, контроллеры ККТ-101 и ККТ-102 - по шесть положений. [52]
Кулачковые контроллеры снабжены переключающим контактным устройством со стыковыми перекатывающимися контактами, приводимыми в действие при помощи фасонных кулачков. Перекатывающиеся контакты имеют ряд преимуществ по сравнению со скользящими. [53]
Крановые кулачковые контроллеры служат для пуска, регулирования скорости вращения и реверсирования крановых двигателей переменного и постоянного тока путем изменения схемы главной цепи или цепи возбуждения, а также величины включенных в электрическую цепь сопротизле-ний. [54]
Кулачковые контроллеры ККТ 61А, ККТ 62А и ККТ 68А отличает невысокое качество регулирования скорости двигателя. [56]
Кулачковые контроллеры ККТ 65А и ККТ 69А применяются вместе с защитной панелью ПЗКБ, обеспечивающей нулевую ( контактор К. [58]
Кулачковые контроллеры НП-102 и НП-152 имеют несимметричную схему и применяются для подъемных механизмов; конечный выключатель предусмотрен лишь в направлении движения вверх. В нулевом положении контроллера образуется цепь электрического торможения. В положениях спуска якорь двигателя включается параллельно цепи, образуемой обмоткой главных полюсов и частью сопротивлений. Контроллер обеспечивает кроме двигательных режимов тормозной режим с регулированием скорости и силовой спуск для малых грузов. [59]
Кулачковые контроллеры ККТ имеют двухрядную конструкцию, при которой каждая шайба вала соединяется одновременно с двумя роликами контактных элементов. [60]
Страницы: 1 2 3 4 5
www.ngpedia.ru






423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)