 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
РАЗРАБОТКА КИНЕМАТИЧЕСКОЙ СХЕМЫ ПРИВОДА. Кинематические схемы
_Глава 9 Кинематические схемы - Стр 2
Примечание. Обозначения других видов движения следует строить по аналогии с приведенными в табл. 2.
Условные обозначения некоторых элементов машин и механизмов в схемах, вычерчиваемых в аксонометрических проекциях, рекомендуется изображать, как показано в таблице.
| Наименование | Обозначение |
| 1. Вал, валик, ось, стержень | |
| 2. Знак, характеризующий неподвижность кинематического элемента | |
| 3. Соединение карданное: |
|
| а) нерегулируемое | |
| б) регулируемое | |
| 4. Подшипник вала или направляющие для прямолинейного движения | |
| 5. Соединение двух валов телескопическое | |
| 6. Передача цилиндрическими зубчатыми или фрикционными колесами внешнего и внутреннего зацепления | |
| 7. Передача червячная | |
| 8. Передача винтовыми зубчатыми колесами | |
| 9. Передача зубчатая реечная | |
| 10. Колесо зубчатое с выборкой мертвого хода | |
| 11. Передача некруглыми колесами | |
| 12. Маховичок | |
| 13. Муфта предохранительная | |
| 14. Тормоз | |
| 15. Эксцентрики: |
|
| а) со щупом поступательного движения б) со щупом качающимся | |
| 16. Передача коническими зубчатыми или фрикционными колесами | |
| 17. Маховичок с фиксацией установленного положения на корпус | |
| 18. Рукоятка | |
| 19. Концы вала под съемную рукоятку: |
|
| а) цилиндрические со штифтом | |
| б) квадратные | |
| 20. Конец вала под съемную рукоятку с фиксацией установленного положения на корпус | |
| 21. Поводок | |
| 22. Муфта-поводок | |
| 23. Муфта необратимой передачи | |
| 24. Шкала: | Дисковая Барабанная Линейная |
| а) подвижная с неподвижным указателем | |
| б) неподвижная с подвижным указателем | |
| 25. Устройство шкальное: |
|
| а) шкала двухотсчетная | |
| б) шкала трехотсчетная | |
| 26. Кнопка | |
| 27. Счетчик механический | |
| 28. Фиксатор |
9.2 Правила выполнения кинематических схем
Корпусные части составляющей единицы (машиныилимеханизма) не показывают совсем или наносят их контур сплошными тонкими линиями. Пространственные кинематические механизмы изображают обычно в виде развёрнутых схем вортогональных проекциях. Их получают путём размещения всех осей в одной плоскости. Такие схемы позволяют прояснить последовательность передачи движения, но не показывают действительного расположения деталей механизма. Кинематические схемы допускается выполнять ваксонометрии.
Все детали (звенья) на кинематических схемах изображают условно в виде графических символов, которые лишь раскрывают принцип их работы. Соединения смежных звеньев, которое допускает их относительное движение, называют кинематической парой. Наиболее распространённые кинематические пары:шарнир, ползун и направляющая,винт и гайка, шаровой шарнир. Допускается использовать нестандартные условные графические обозначения, но с соответствующими пояснениями на схеме. На кинематической схеме разрешается изображать отдельные элементысхемдругих видов, которые непосредственно влияют на их работу (например,электрическиеилигидравлические).
Кроме условных графических обозначений, на кинематических схемах дают указания у виде надписей, поясняющих изображённый элемент. Например, указывают тип и характеристику двигателя, диаметры шкивов, модуль и число зубьев зубчатых колёс и др. Взаимное расположение звеньев на кинематической схеме должно соответствовать начальному, среднему или рабочему положению исполнительных органов механизма или машины. Если звено при работе изделия меняет своё положение, то на схеме допускается указывать её крайние положения тонкими штрихпунктирными линиями. На кинематической схеме звеньям присваивают номера в порядке передачи движения, начиная от двигателя. Валы номеруют римскими цифрами, остальные элементы — арабскими. Порядковый номер элемента проставляют на полочке выносной линии. Под полочкой указывают основные характеристики и параметры кинематического звена.
На кинематических схемах валы,оси,стержниизображают сплошными основными линиями;зубчатые колёса,червяки,звёздочки,шкивы,кулачки— сплошными тонкими линиями.
9.3 Чтение кинематических схем
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. Определяя последовательно по условным обозначениям каждый элементкинематической цепи, устанавливают его назначение и характер передачи движения.
ГОСТ 2.770-68 (2000) ЕСКД. Обозначения условные графические на схемах. Элементы кинематики.
ГОСТ 2.703-68. ЕСКД. Правила выполнения кинематических схем.
ISO 3952 Kinematic diagrams — Graphical symbols.
В соответствии с ГОСТ 2.701-84 «Схемы. Виды и типы. Общие требования к выполнению» схемы классифицируются по назначению, а также по типу элементов и связей между ними. Наименование и код схем определяют их видом и типом. Код схемы должен состоять из буквенной части, определяющей вид схемы, и цифровой части, определяющей тип схемы (таблица 16). Таблица 16 – Виды и типы схем
Например, схема электрическая принципиальная - ЭЗ; схема гидравлическая соединений - Г4; схема деления структурная - E1; схема электрогидравлическая принципиальная - СЗ; схема электрическая соединений и подключения - ЭО; схема гидравлическая структурная, принципиальная и соединений - ГО. Структурные схемы определяют основные функциональные части изделия или процесса, их назначение и взаимосвязи. Этот тип схем применяется наиболее часто, он объединяет схемы, отражающие состав изделий; блок-схемы, определяющие алгоритмы обработки информации; организационно-управленческие схемы и т. п. Функциональные схемы содержат информацию о процессах, протекающих в объектах. Такие схемы позволяют анализировать возможности вновь разрабатываемых объектов, обосновывать проведение отладки и ремонта. Принципиальные схемы определяют полный состав элементов объекта и связей между ними, служат основанием для разработки комплекта конструкторской документации на объект. Схемы соединений отображают только связи между частями объекта, осуществляемые с помощью связующих элементов, с указанием их геометрического положения относительно частей объекта. Схемы подключений показывают внешние подключения объектов. Схемы расположения отображают геометрическое расположение элементов объектов относительно друг друга. Общие схемы составляются с целью наглядного представления информации о составе очень сложных объектов и видах связи между их частями. | |||||||||||||||||||||||||||||||||||||||||||||
studfiles.net
Принципиальная кинематическая схема — википедия фото
Принципиальная кинематическая схема — это такая схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины (например, шпинделю станка, режущему инструменту, ведущим колёсам автомобиля и др.) и их взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения (зубчатые колёса, ходовые винты, валы, шкивы, муфты и др.) без соблюдения размеров и пропорций.
Корпусные части составляющей единицы (машины или механизма) не показывают совсем или наносят их контур сплошными тонкими линиями. Пространственные кинематические механизмы изображают обычно в виде развёрнутых схем в ортогональных проекциях. Их получают путём размещения всех осей в одной плоскости. Такие схемы позволяют прояснить последовательность передачи движения, но не показывают действительного расположения деталей механизма. Кинематические схемы допускается выполнять в аксонометрии.
Все детали (звенья) на кинематических схемах изображают условно в виде графических символов (ГОСТ 2.770-68 (2000)), которые лишь раскрывают принцип их работы. Соединения смежных звеньев, которое допускает их относительное движение, называют кинематической парой. Наиболее распространённые кинематические пары: шарнир, ползун и направляющая, винт и гайка, шаровой шарнир. Допускается использовать нестандартные условные графические обозначения, но с соответствующими пояснениями на схеме. На кинематической схеме разрешается изображать отдельные элементы схем других видов, которые непосредственно влияют на их работу (например, электрические или гидравлические).
Кроме условных графических обозначений, на кинематических схемах дают указания в виде надписей, поясняющих изображённый элемент. Например, указывают тип и характеристику двигателя, диаметры шкивов, модуль и число зубьев зубчатых колёс и др. Взаимное расположение звеньев на кинематической схеме должно соответствовать начальному, среднему или рабочему положению исполнительных органов механизма или машины. Если звено при работе изделия меняет своё положение, то на схеме допускается указывать его крайние положения тонкими штрихпунктирными линиями. На кинематической схеме звеньям присваивают номера в порядке передачи движения, начиная от двигателя. Валы номеруют римскими цифрами, остальные элементы — арабскими. Порядковый номер элемента проставляют на полочке выносной линии. Под полочкой указывают основные характеристики и параметры кинематического звена.
На кинематических схемах валы, оси, стержни изображают сплошными основными линиями; зубчатые колёса, червяки, звёздочки, шкивы, кулачки — сплошными тонкими линиями.
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
org-wikipediya.ru
Схемы кинематические принципиальные
Министерство образования и науки РФ
ФГБОУ ВПО «Удмуртский государственный университет»
Институт гражданской защиты
Кафедра общеинженерных дисциплин
Учебно-методическое пособие
Ижевск 2012
УДК 744.42:62(075)
ББК 30.112я 7
В673
Рекомендовано к изданию Учебно-методическим советом УдГУ
Рецензент к.т.н., доцент кафедры дизайна промышленных изделий ИИиД
ФГБОУ ВПО УдГУ Д.В.Скуба
Волжанова О.А.
В673 Схемы кинематические принципиальные: учеб.- метод. пособие / Ижевск: Изд-во «Удмуртский университет», 2012. 34 с.
В пособии рассматривается раздел «Инженерной графики» - схемы. Даны основные положения и правила выполнения кинематических принципиальных схем, а также варианты индивидуальных заданий и указания по их выполнению.
Изложена информация по условным графическим и буквенно-цифровым обозначениям в кинематических схемах. Приведены примеры оформления схемы кинематической принципиальной.
Предназначено для студентов 1-го курса инженерных направлений УдГУ. Данное учебно-методическое пособие будет полезным студентам, осваивающим дисциплины "Механика", "Детали машин", "Метрология" на старших курсах, а также при выполнении курсовых работ, выпускной квалификационной работы.
УДК 744.42:62(075)
ББК 30.112я 7
© Сост. О.А. Волжанова, 2012
© ФГБОУ ВПО «Удмуртский
государственный университет, 2012
Содержание
Предисловие……………………………………………………………………..…...4
Введение.......................................................................................................................6
1.Определения, термины.............................................................................................7
2.Виды и типы схем.....................................................................................................7
3. Правила выполнения схем......................................................................................9
3.1. Общие требования к выполнению схем.......................................................9
3.2. Условные графические обозначения элементов........................................10
3.3. Позиционные обозначения элементов........................................................13
3.4. Перечень элементов......................................................................................13
4. Кинематические схемы.........................................................................................16
4.1. Структурные схемы......................................................................................16
4.2. Функциональные схемы...............................................................................16
4.3. Принципиальные схемы...............................................................................17
5. Графическое оформление кинематической принципиальной схемы..............17
5.1. Общие сведения о задании..........................................................................17
5.2.Условные обозначения элементов кинематических схем.........................20
5.3.Приложение 1. Варианты индивидуальных графических заданий..........................................................................................................................26
5.4. Приложение 2. Схемы и наглядные изображения технических устройств....................................................................................................................32
Список рекомендуемой литературы….................................................................34
studfiles.net
РАЗРАБОТКА КИНЕМАТИЧЕСКОЙ СХЕМЫ ПРИВОДА
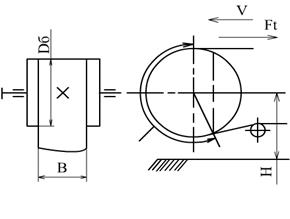
Привод цепного или ленточного конвейера, как и любая другая машина, включает в себя три основных сборочных единицы:

В качестве двигателя (1) у большинства конвейеров используется стандартный электромотор трехфазного тока. Передаточный механизм (2) в зависимости от задания на курсовой проект содержит или открытую передачу (зубчатую, ременную, цепную) и редуктор, или один редуктор. Редукторы представлены различными типами (например, цилиндрические, конические, коническо-цилиндрические, червячные), как одноступенчатые, так и двухступенчатые. Исполнительным механизмом (ИМ) (3) в выполняемом проекте является приводной вал конвейера: для ленточного конвейера  это вал приводного барабана, а для цепного конвейера вал с одной или двумя приводными звездочками.
это вал приводного барабана, а для цепного конвейера вал с одной или двумя приводными звездочками.
Кинематическая схема привода разрабатывается в соответствии с условными обозначениями кинематических схем (табл. 1.1).
В случае представления технического задания в виде шифра кинематическая схема разрабатывается в следующем порядке:

Таблица 2.1.1
Условные обозначения элементов кинематических схем
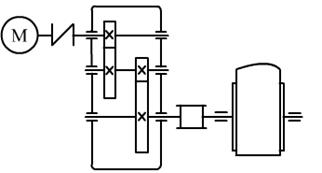
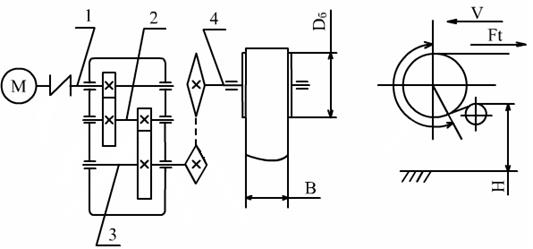
Последовательно выбирая нужные элементы (рис. 1.1, 1.2, 1.3), разрабатывают кинематическую схему.


 Д1
Д1
Рис. 1.1. Варианты принципиальных схем привода
|
|
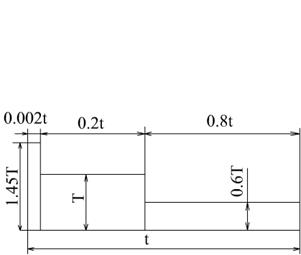
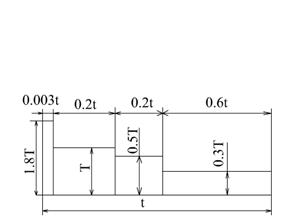
Срок службы – 5 лет Кгод= 0,5; Ксут = 0,33 |
Срок службы – 5 лет Кгод = 0,6; Ксут= 0,5 |
|
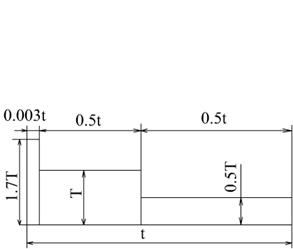
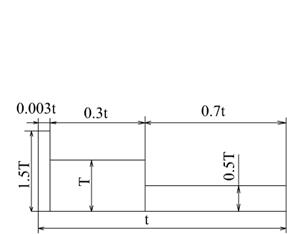
Срок службы – 5 лет Кгод = 0,7; Ксут = 0,75 |
Срок службы – 5 лет Кгод = 0,8; Ксут = 0,6 |
|
КП.15.Д1.34. КП.15.Д3.12.

|

|
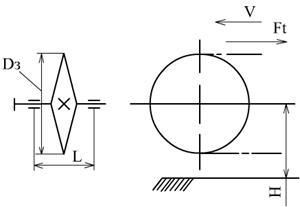
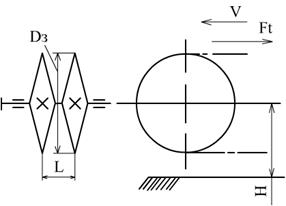
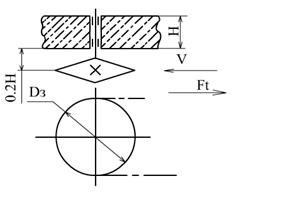
Составляя кинематические схемы (рис. 1.4), следует учитывать, что при передаче тягового усилия Ft зацеплением с помощью тяговых цепей (цепные конвейеры) в приводе необходимо предусмотреть предохранительное устройство в виде предохранительной муфты предельного момента. Например, соединение приводной звездочки со ступицей можно выполнить через срезной штифт.
Похожие статьи:
poznayka.org
Кинематические схемы | Конструкция бурильных и бурильно-крановых машин
Кинематической схемой машины называется условное схематическое изображение ее механизмов, показывающее их взаимосвязь и способ передачи движения от двигателя рабочим механизмам. Условные обозначения различных элементов механизмов, принятые для упрощения чертежа, приведены в табл.2.
Рассмотрим кинематическую схему наиболее распространенной бурильно-крановой машины БМ-205 (рис. 13), представляющую собой привод бурильной штанги с бурильным инструментом и барабана лебедки грузоподъемного оборудования.
Рис. 13. Кинематическая схема бурильно-крановой машины БМ-205: 1 — двигатель, 2 — подвижная блок-шестерня, 3, 9, 16, 27, 37 — конические подшипники, 4, 24 — подвижная шестерня, 5, 8, 10, 14, 15, 17—19, 26 — неподвижные цилиндрические шестерни, 6, 11, 21, 23, 25, 33, 35 — шарикоподшипники, 7, 20 — паразитные цилиндрические шестерни, 12 — червячное колесо. 13 — червяк, 22 — фрикционная муфта, 28 — вал-шестерня, 29 — цилиндрический роликоподшипник, 30 — канат, 31 — крюк, 32 — бурильная штанга, 34 — коническая шестерня, 36— барабан; I, III—VIII — валы, II, IX — карданные валыПривод бурильной штанги. От вала 1 отбора мощности трактора через карданный вал II вращение передается установленному на подшипниках 25 входному валу III с сидящей на нем шестерней 26 раздаточной коробки и далее через связанную с ней шестерню 15, вал VI, установленный на конических подшипниках 16, и сидящую на нем шестерню 14 — на шестерню 17 и вал V. Вместе с валом V вращаются неподвижно закрепленные на нем шестерни 18, 19, 5 и подвижная шестерня 4. Введение в зацепление подвижной блок-шестерни 2 с шестерней 5 или 17 обеспечивает две прямые передачи вращения валу IV, установленному на подшипниках 3 и 23. При зацеплении подвижной шестерни 24 с шестерней 18 валу IV передается третья прямая передача вращения, а с паразитной шестерней 20, сидящей на шарикоподшипнике 21 и связанной постоянно с шестерней 19,— обратное вращение. С вала IV через сидящую на нем фрикционную муфту 22 и карданный вал IX вращение передается валу-шестерне 28 вращателя, установленному на конических подшипниках 27 и цилиндрическом роликоподшипнике 29, и далее через шестерню 34 с проходным квадратным отверстием, сидящую на шарикоподшипниках 33 и 35, на бурильную штангу 32 квадратного наружного профиля с бурильным инструментом (на схеме не показан), имеющую возможность осевого перемещения в отверстии шестерни 34. Бурильная штанга получает три прямые и одну обратную передачи вращения в соответствии с вращением вала IV.
Привод барабана лебедки грузоподъемного оборудования. Получение вращения валом V было описано выше. При зацеплении подвижно сидящей на валу V шестерни 4 с шестерней 10 вал VII, сидящий на подшипниках 9 и 11, получает прямое вращение; при зацеплении шестерни 4 (через паразитную шестерню 7, сидящую на шарикоподшипнике 6) с шестерней 8 — обратное вращение. От вала VII через жестко сидящий на нем червяк 13 вращение передается червячному колесу 12, валу VIII, установленному на конических подшипниках 37, и барабану 36 лебедки с находящимся на нем канатом 30 и крюком 31.
В соответствии с направлением вращения вала VII вращается барабан 36, наматывая или стравливая канат 30. Нагрузка на лебедку ограничивается кулачковой муфтой, которую настраивают на момент, соответствующий максимальной грузоподъемности кранового оборудования машины.
Фрикционная муфта 22 предохраняет привод бурильной штанги 32 от перегрузки и отключает вращатель с бурильной штангой от раздаточной коробки при переключении ее передач.
Унифицированные бурильно-крановые машины БМ-202А, БМ-302А и БМ-305 имеют аналогичные кинематические схемы. Схемы остальных машин рассмотрены при описании их устройства (см. гл. IV).
www.stroitelstvo-new.ru
Принципиальная кинематическая схема - это... Что такое Принципиальная кинематическая схема?
Принципиальная кинематическая схема — это такая схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины (например, шпинделю станка, режущему инструменту, ведущим колёсам автомобиля и др.) и их взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения (зубчатые колёса, ходовые винты, валы, шкивы, муфты и др.) без соблюдения размеров и пропорций.
Нормативные документы
Стандарты, регламентующие условные обозначения и выполнение кинематических схем:
- ГОСТ 2.770-68 (2000) ЕСКД. Обозначения условные графические на схемах. Элементы кинематики.
- ГОСТ 2.703-2011. ЕСКД. Правила выполнения кинематических схем.
- ISO 3952 Kinematic diagrams — Graphical symbols.
Правила выполнения кинематических схем
Корпусные части составляющей единицы (машины или механизма) не показывают совсем или наносят их контур сплошными тонкими линиями. Пространственные кинематические механизмы изображают обычно в виде развёрнутых схем в ортогональных проекциях. Их получают путём размещения всех осей в одной плоскости. Такие схемы позволяют прояснить последовательность передачи движения, но не показывают действительного расположения деталей механизма. Кинематические схемы допускается выполнять в аксонометрии.
Все детали (звенья) на кинематических схемах изображают условно в виде графических символов (ГОСТ 2.770-68 (2000)), которые лишь раскрывают принцип их работы. Соединения смежных звеньев, которое допускает их относительное движение, называют кинематической парой. Наиболее распространённые кинематические пары: шарнир, ползун и направляющая, винт и гайка, шаровой шарнир. Допускается использовать нестандартные условные графические обозначения, но с соответствующими пояснениями на схеме. На кинематической схеме разрешается изображать отдельные элементы схем других видов, которые непосредственно влияют на их работу (например, электрические или гидравлические).
Кроме условных графических обозначений, на кинематических схемах дают указания в виде надписей, поясняющих изображённый элемент. Например, указывают тип и характеристику двигателя, диаметры шкивов, модуль и число зубьев зубчатых колёс и др. Взаимное расположение звеньев на кинематической схеме должно соответствовать начальному, среднему или рабочему положению иполнительных органов механизма или машины. Если звено при работе изделия меняет своё положение, то на схеме допускается указывать её крайние положения тонкими штрихпунктирными линиями. На кинематической схеме звеньям присваивают номера в порядке передачи движения, начиная от двигателя. Валы номеруют римскими цифрами, остальные элементы — арабскими. Порядковый номер элемента проставляют на полочке выносной линии. Под полочкой указывают основные характеристики и параметры кинематического звена.
На кинематических схемах валы, оси, стержни изображают сплошными основными линиями; зубчатые колёса, червяки, звёздочки, шкивы, кулачки — сплошными тонкими линиями.
Чтение кинематических схем
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
Литература
- Артоболевский И. И. Теория машин и механизмов. М. Наука 1988.
См. также
dic.academic.ru
Кинематические схемы экскаваторов
Строительные машины и оборудование, справочник

Категория:
Эксплуатация экскаваторов
Кинематические схемы экскаваторовКинематической схемой машины называется условное схематическое изображение ее механизмов, показывающее их взаимосвязь и способ передачи движения от двигателя к рабочим механизмам.
На рис. 44 показана кинематическая схема распространенного экскаватора Э-652А оборудованного прямой лопатой, а на рис. 45 — взаимное расположение механизмов этого экскаватора (без дизеля).
Движение от двигателя к рабочим механизмам передается следующим образом. На валу двигателя установлена однодисковая фрикционная муфта, обычно называемая главной муфтой. При помощи этой муфты вал двигателя соединяется с главной трансмиссией экскаватора или отсоединяется от нее. Главной трансмиссией называются элементы механизмов, вращающиеся при включенной главной муфте и выключенных остальных фрикционах, управляющих движениями рабочих механизмов.
Так, при включении главной муфты начинают вращаться цепная передача, шестерни, а также вала.
Все это и составляет главную трансмиссию экскаватора. Вместе с этими элементами вращаются жестко связанные с ними элементы механизмов, а именно: вместе с валом, называемым горизонтальным валом реверсивного механизма, вращаются шкивы двухконусных колодочных фрикционов 26\ с шестерней — диск с фрикционными колодками двухконусного фрикциона, а с валом (вал главной лебедки)-—ведущий диск фрикциона механизма открывания днища ковша и крестовины ленточных фрикционов внутреннего типа.

Рис. 44. Кинематическая схема экскаватора Э-652А с прямой лопатой:1 — вал двигателя, 2 — главная муфта, 3 — цепная передача, 4, 5, 9, 35, 45, 46, 47, 48, 50 — цилиндрические шестерни, 6, 26, 30 — двухконусные фрикционы, 7, 8, 27, 31, 33, 42 — валы, 10, 21 — ленточные фрикционы, 11, 18, 20 — тормоза, 12, 16, 19, 24, 37, 41 — звездочки 13 — возвратный канат, 14 — напорный канат, 15 — напорный барабан, 17 — подъемный барабан, 22 — стрелоподъемный барабан, 23, 32, 34, 39 — кулачковые муфты, 25, 28, 29, 38, 43 — конические шестерни, 36 — зубчатый венец, 40 — ведущие колеса гусениц, 44 — двухсторонний управляемый стопор, 49 — вертикальный вал реверса
Рис. 45. Расположение механизмов экскаватора Э-652А (обозначения те же, что и на рис. 44)
Если смотреть на трансмиссию со стороны радиатора„двигателя (справа), то вал двигателя и валы с закреплениями на них деталями вращаются по часовой стрелке, а шестерня — против часовой стрелки. Это следует иметь в виду, чтобы правильно определять направление движения рабочих механизмов во время подключения их к главной трансмиссии.
Следовательно, при включении главной муфты рабочие механизмы экскаватора только подготовлены к работе, но не включены. Для передачи движения рабочим механизмам, выполняющим операции рабочего цикла (копание, поворот платформы и др.), нужно включить соответствующий фрикцион, соединяющий данный механизм с главной трансмиссией. Для включения некоторых механизмов необходимо предварительно (перед включением фрикциона) включать кулачковую муфту или подвижную шестерню, так как в ряде случаев один и тот же фрикцион можно использовать для подключения к трансмиссии нескольких механизмов, причем тот или иной механизм соединяется с ведомой частью фрикциона кулачковой муфтой или подвижной шестерйей.
Основные рабочие механизмы экскаватора Э-652А приводятся в движение следующим образом.
Подъем ковша осуществляется включением ленточного фрикциона, соединяющего свободно вращающийся подъемный барабан с валом. При вращении этого барабана на него навивается канат подъема ковша и ковш подтягивается к головным блокам стрелы. Если нужно остановить ковш и задержать его в поднятом положении, фрикцион выключают и одновременно включают тормоз, затормаживающий барабан. Ковш опускается под действием собственного веса. Скорость его спуска регулируется тормозом. Фрикцион включен во время копания грунта и подъема ковша для выгрузки. Тормозом (ленточным наружного типа) пользуются для удержания груженого ковша в поднятом положении при повороте платформы к месту разгрузки и во время разгрузки, а также для опускания опорожненного ковша при обратном повороте в забой.
Выдвижение рукояти с ковшом (напор) осуществляется включением ленточного фрикциона внутреннего типа. Сдвоенная звездочка начинает вращаться по часовой стрелке и в этом же направлении вращаются соединенные однорядными цепями со звездочкой звездочки. При вращении барабана по часовой стрелке на него снизу навиваются оба конца напорного канала, а с верхней части барабана отпускается возвратный канат. Длина ненавитой на барабан части напорного каната сокращается настолько, насколько увеличивается длина ненавитой части возвратного каната. Напорный канат проходит через расположенные на оси седлового цодшипника стрелы крайние блоки и огибает уравнительный блок на заднем конце рукояти ковша. Возвратный канат, огибающий средний блок на оси седлового подшипника, закреплен одним концом в передней части рукояти, у ковша. Таким образом, при вращении барабана по часовой стрелке задний конец рукояти подтягивается к подшипнику, то есть рукоять с ковшом .выдвигается, осуществляя напор.
Двухсторонняя кулачковая муфта может жестко соединять с валом либо звездочку, либо стрелоподъемный барабан.
Во время работы прямой лопатой муфта обычно включает звездочку (к барабану эту муфту подключают очень редко, так как при таком виде оборудования угол наклона стрелы не изменяется). Поэтому при включении фрикциона звездочка, кулачковая муфта и вал со шкивом двухконусного фрикциона вращаются вместе со звездочкой по часовой стрелке навстречу шестерне и укрепленным на ней фрикционным колодкам фрикциона 6.
Втягивание рукояти с ковшом (возврат) осуществляется включением фрикциона. Вал начинает вращаться против часовой стрелки и вращение передается через кулачковую муфту и звездочки напорному барабану. При вращении барабана против часовой стрелки на него навивается возвратный канат и разматывается напорный канат, то есть происходит втягивание рукояти.
При копании грунта обычно пользуются фрикционом одновременно с фрикционом, регулируя таким образом толщину срезаемой стружки грунта и направление движения ковша. С помощью фрикционов ковш устанавливают точно над местом разгрузки. Длй удержания рукояти ковша от выдвижения или втягивания используют ленточный тормоз наружного типа. Тормоз необходим также для забрасывания ковша «под себя» при подготовке к следующей операций копания.
Для подъема стрелы кулачковую муфту включают направо, жестко соединяя стрелоподъемный барабан с валом. Затем включают двухконусный фрикцион и вал с барабаном начинают вращаться против часовой стрелки. Стрелоподъемный канат навивается на барабан и стрела поднимается.
При выключенном фрикционе барабан удерживается от проворачивания управляемым замкнутым ленточным тормозом наружного типа. Для опускания стрелы необходимо ослабить затяжку тормоза специальным рычагом. Если не нажимать на этот рычаг, то рабочая пружина тормоза снова затянет его и затормозит барабан.
Во избежание падения стрелы при неосторожном растормажи-вании или выходе из строя тормоза применено противообгонное устройство, состоящее из звездочки, жестко соединенной с барабаном, цепи, соединяющей эту звездочку со звездочкой противообгонной муфты, и собственно противообгонной муфты. При вращении стрелового барабана против часовой стрелки (подъем стрелы) звездочка противообгонной муфты вращается навстречу ^алу главной лебедки и противообгонная муфта проворачивается беспрепятственно. При опускании стрелы звездочка противообгонного устройства вращается по часовой стрелке все с большей скоростью и, когда скорости вращения звездочки и вала будут равны, противообгонная муфта срабатывает. Таким образом, скорость опускания стрелы ограничивается скоростью вращения вала главной лебедки и стрела не падает.
Особенностью механизмов поворота платформы и передвижения экскаваторов (ходового механизма) является возможность передачи движения в противоположных направлениях, что необходимо для поворота платформы вправо и влево, а также передвижения вперед и назад.
Изменение направления вращения (реверсирование) осуществляется механизмом реверса, через который движение передается на поворотный и ходовой механизмы. Механизм реверса экскаватора Э-652А, состоящий из двух валов, трех конических шестерен и двух двухконусных фрикционов, действует следующим образом. На горизонтальном валу, вращающемся по часовой стрелке, укреплены на шпонках шкивы фрикционов, которые могут перемещаться вдоль вала и вращаться вместе с ним. На этом же валу смонтированы на подшипниках качения шестерни, находящиеся в постоянном зацеплении с шестерней 28, жестко (на шлицах) посаженной на конец вертикального вала реверса. К шестерням прикреплены болтами фрикционные колодки двухконусных фрикционов.
При выключенных фрикционах все конические шестерни неподвижны. Если включить фрикцион, то шестерня будет вращаться вместе с валом и передаст движение шестерне и валу, которые будут вращаться по часовой стрелке (если смотреть сверху, со стороны шестерни). При этом шестерня вращается навстречу валу.
При включении фрикциона шестерня вращается по часовой стрелке вместе с валом, а шестерня и вал — против часовой стрелки. Навстречу валу вращается шестерня. Таким образом осуществляется реверсирование вертикального вала механизма реверса.
Управление фрикционами сконструировано так, чтобы предотвратить одновременное включение обоих фрикционов, так как это вызывает останов двигателя, а иногда может привести к по-лоЛке шестерен.
От вала движение передается поворотному и ходовому механизмам следующим образом. Вдоль вала по шлицам перемещается сдвоенная шестерня, которая может вводиться в зацепление с шестернями, жестко закрепленными на промежуточном вертикальном валу. Шестерня находится в постоянном зацеплении с шестерней и через нее с шестерней, свободно вращающимися: первая — на вертикальном поворотном валу, вторая —на вертикальном ходовом валу. Обе шестерни могут быть жестко соединены со своими валами при помогай кулачковых муфт. Конструкция механизма включений муфт позволяет включать одновременно только одну из них; вторая муфта при выключается.
На шлицах нижнего конца поворотного вала жестко закрепит шестерня, находящаяся в постоянном зацеплении с поворотным зубчатым венцом, приваренным к ходовой раме. При вращении вала шестерня обкатывается по венцу, поворачивая платформу относительно ходовой части. Включая правый или левый фрикционы механизма реверса, можно изменять направление вращения шестерни, поворачивая таким образом платформу в одну или другую сторону.
Платформу можно поворачивать с большей или меньшей скоростью. Если сдвоенная шестерня находится в зацеплении с шестерней, поворот происходит с меньшей скоростью, при зацеплении шестерни с шестерней — с большей скоростью.
Большую скорость поворота платформы используют при работе с землеройным оборудованием, а меньшую — с крановым оборудованием.
Платформу останавливают в требуемом положении ленточным тормозом открытого типа, затормаживающим шкив, жестко укрепленный на верхнем конце поворотного вала. Для передачи движения ходовому механизму экскаватора нужно включить муфту; при этом выключится муфта поворотного механизма.
Вращение будет передаваться через вал и закрепленную на его нижнем конце коническую шестерню шестерне, жестко связанной с горизонтальным валом ходового механизма.
Вал состоит из трех частей: средней и двух боковых (полуосей). Полуоси можно соединять со средней частью двумя кулачковыми муфтами. Эти муфты постоянно включены пружинами, то есть все три части вала представляют собой одно целое. При вращении шестерни движение передается ведущим цепным звездочкам, а затем втулочно-роликовыми цепями — ведомым звездочкам, закрепленным на валах ведущих колес гусениц.
Направление вращения колес, а следовательно, и направление движения экскаватора изменяют фрикционами механизма реверса аналогично тому, как изменяют движение поворотного механизма.
Для передвижения экскаватора по кривой нужно отключить от вращающейся трансмиссии одну из гусениц, а для крутого поворота остановить ее. Это осуществляется кулачковыми муфтами, причем при повороте вправо отключается правая гусеница, а при повороте влево — левая. Гусеница отключается перемещением подвижной полумуфты по направлению к цепной звездочке. Полуось сначала отключается от средней части вала, а затем стопорится, так как своими кулачками полумуфта соединяется с неподвижным стопором, приваренным к раме ходовой части. Таким образом, одна из гусениц экскаватора останавливается, а вторая, движущаяся, гусеница поворачивает экскаватор вокруг неподвижной гусеницы.
На время передвижения экскаватора тормоз механизма поворота платформы должен быть обязательно включен, так как иначе может произойти неожиданный поворот платформы, вызванный поперечным наклоном дороги или инерцией движения платформы при повороте гусениц.
При работе ходовая часть экскаватора должна быть неподвижной. Непроизвольное перемещение экскаватора под влиянием усилий, действующих на ковш во время копания грунта, нарушает четкость управления процессом копания и может привести к аварии. Так, например, при работе драглайном или обратной лопатой усилие в тяговом канате стремится неГ только подтянуть ковш к машине, но и сдвинуть экскаватор к ковшу, причем это усилие бывает максимальным тогда, когда ковш упирается в какое-либо препятствие. Поэтому весьма серьезное значение имеет надежность устройства, предотвращающего перемещение экскаватора при работе и при остановке на уклоне. В экскаваторе Э-652А это обеспечивается двухсторонним управляемым стопором.
Экскаватор может перемещаться с меньшей или большей скоростью, что достигается переключением сдвоенной шестерни.
Особенности кинематической схемы экскаватора Э-652А заключаются в следующем:1) на поворотной платформе расположены в одной плоскости три основных горизонтальных вала — вал 8 главной лебедки, промежуточный вал и вал реверсивного механизма;2) стрелоподъемный механизм может работать одновременно с механизмом поворота платформы и независимо от него; движение стрелоподъемному механизму передается шестернями;3) реверс механизма поворота платформы и ходового механизма экскаватора осуществляется коническими шестернями и двухконусными фрикционами, причем имеются две скорости поворота и передвижения;4) рабочее оборудование прямой лопаты имеет канатный напорный механизм.
На рис. 46 и 47 показаны кинематическая схема и расположение механизмов экскаваторов Э-1251А, Э-1252А.
Движение от двигателя передается трансмиссии через муфту (у экскаватора Э-1251А — эластичную муфту, постоянно соединяющую вал электродвигателя и трансмиссию; у экскаватора Э-1252А —однодисковый фрикцион). В главную трансмиссию экскаватора входят: редуктор, шестерни, главный трансмиссионный вал реверсивного механизма и вал главной лебедки.
Подъем ковша осуществляется включением наружного ленточного фрикциона, соединяющего установленный на подшипниках барцбан с валом. Останавливается барабан при помощи наружного ленточного тормоза.
Рис. 46. Кинематическая схема экскаватора Э-1251А (Э-1252А):1 — двигатель, 2 — муфта, 3 — редуктор, 4, 5, 6, 7, 12, 31, 34, 35, 37, 41, 42 — цилиндрические шестерни, 8, 19 — ленточные фрикционы, 9, 18, 32, 46 — ленточные тормоза, 10, 11 — сдвоенные звездочки, 13 — рукоять 14 — сед-ловой подшипник, 15, 20, 27, 30, 38, 40, 43 — валы, 16, 21 — цепные передачи

Pис. 47. Расположение механизмов экскаватора Э-1251А и Э-1252А v (обозначения те же, что и на рис. 46)
Напорный механизм останавливают ленточным тормозом, шкив которого жестко соединен со сдвоенной звездочкой для втягивания рукояти нужно включить одноконусный фрикцион, соединяющий звездочку с валом. От звездочки движение цепью передается сдвоенной звездочке, которая будет при этом вращаться навстречу валу, то есть в направлении, противоположном движению напора. От звездочки на рукоять движение передается таким же образом, как и при выдвижении рукояти, только в обратном направлении.
На экскаваторе Э-1251А (Э-1252А) установлен механизм реверса, состоящий из трех конических шестерен и двух одноконусных фрикционов. Механизм реверса работает так же, как описанный выше механизм реверса экскаватора Э-652А. С вертикального вала механизма реверса движение через шестерник передается находящимся в постоянном зацеплении шестерням. Шестерня свободно вращается на поворотном валу и может соединяться с ним кулачковой муфтой. Шестерня свободно вращается на вертикальном валу ходового механизма и также может соединяться с этим валом кулачковой муфтой. Управление муфтами сблокировано таким образом, что при включении одной из них вторая обязательно выключается, то есть движение может передаваться либо на поворотный, либо на ходовой механизм.
Для поворота платформы включают кулачковую муфту, после чего с помощью одного из фрикционов поворотный вал приводят во вращение. Шестерня, связанная с валом, обкатывается вокруг приваренного к ходовой раме неподвижного зубчатого венца с внешними зубьями и платформа поворачивается. Шестерня находится с венцом в постоянном зацеплении.
Для остановки и фиксации поворотной платформы установлен ленточный наружный тормоз.
Передвижение экскаватора производится при включении кулачковой муфты, соединяющей вал с шестерней. В остальном кинематическая схема ходового механизма экскаватора Э-1251А (Э-1252А) не отличается от кинематической схемы, экскаватора Э-652А.
Поворот платформы и передвижение экскаватора Э-1251А могут осуществляться только с одной скоростью (вместо двух скоростей у экскаватора Э-652А), так как передаточное отношение от двигателя к этим рабочим механизмам остается неизменным.
Подъем и опускание стрелы осуществляют стрело-подъемным барабаном, который соединен с трансмиссией подвижной шестерней, вводимой в зацепление с шестерней. Шестерня перемещается по шлицам вала червяка, находящегося в постоянном зацеплении с червячным колесом 45 на валу стрелоподъемного барабана. Направление вращения барабана (подъем и опускание стрелы) изменяют механизмом реверса. При включенном стрелоподъемном механизме должны быть включены кулачковые муфты поворотного и ходового механизмов.
При выключенной шестерне, вследствие вибрации машины, вызванной работой двигателя, стрела экскаватора может самопроизвольно опуститься. Это объясняется тем, что в червячной передаче стрелоподъемного механизма экскаватора Э-1251А (Э-1252А) для получения достаточно высоких скоростей подъема и опускания стрелы угол подъема червяка несколько больше, чем необходимо для самоторможения передачи, работающей в масляной ванне. Чтобы предотвратить это, на валу червяка установлен ленточный тормоз 46 замкнутого типа, постоянно притормаживающий вал. Этот тормоз должен находиться под постоянным наблюдением, так как при его ослаблении или сильном замасливании стрела может неожиданно упасть, что особенно опасно при работе с крановым оборудованием.
Особенности кинематической схемы экскаватора Э-1251А заключаются в следующем:1) на поворотной платформе расположены два основных горизонтальных вала — вал главной лебедки и вал реверсивного механизма;2) стрелоподъемный барабан приводят в движение через червячную передачу, а управляют им с помощью того же механизма реверса, который передает движение на механизмы поворота и передвижения; поэтому стрелоподъемный механизм не может работать одновременно с механизмом поворота платформы, что отрицательно сказывается на производительности машины при работе с крановым оборудованием;3) механизмы поворота платформы и передвижения экскаватора реверсируют коническими шестернями и одноконусными фрикционами, причем возможна только одна скорость поворота платформы и передвижения экскаватора;4) рабочее оборудование прямой лопаты имеет зубчато-реечный Скремальерный) напорный механизм.
Подъем ковша осуществляется барабаном, установленным на валу и управляемым при помощи ленточного фрикционавнутреннего типа и тормоза наружного типа.
Подтягивание ковша драглайна производится барабаном, управляемым ленточным фрикционом внутреннего типа и тормозом наружного типа. Если экскаватор оборудуют прямой лопатой, барабан заменяют (аналогично экскаватору Э-652А) сдвоенной цепной звездочкой, которую крепят болтами к шкиву фрикциона. Эта звездочка связана одной цепью с напорным барабаном, а другой со свободно вращающейся на валу звездочкой возврата ковша. При втягивании рукояти эта звездочка соединяется с валом ленточным фрикционом внутреннего типа. При оборудовании экскаватора драглайном звездочку не используют.

Рис. 48. Кинематическая схема экскаватора Э-10011А с драглайном:1 — двигатель, 2 — соединительная муфта, 3 — турботрансформатор, 4, 5, 26 — звездочки, в, 17, 20, 24, 32, 36— валы. 7, 8, 9, 11, 13, 14, 33 — цилиндрические шестерни, 10, 12, 22, 23, 28— фрикционы, 31, 35—кулачковые муфты, 15, 18, 27 — барабаны, 16, 19, 29 — тормоза, 21 — цепная передача, 25 — противообгонная муфта, 30 — коническая передача, 34 —поворотный зубчатый венец, 37 — стопор, 38 — клиноременная передача, 39 — компрессор
Подъем стрелы осуществляется барабаном, свободно вращающимся на валу и управляемым ленточным фрикционом внутреннего типа и тормозом наружного типа. Стрела опускается на тормозе, однако для ограничения скорости опускания барабан связан цепной передачей с противообгонной муфтой роликового типа.
В отличие от экскаваторов Э-652А и Э-1251А у экскаватора Э-10011А реверсируют не вертикальный, а горизонтальный вал, причем механизм реверса состоит не из конических, а из цилиндрических шестерен. Он работает следующим образом. Шестерни соединяются с валами ленточными фрикционами внутреннего типа. Валвращаются в разные стороны. При включении фрикциона шестерня вращается вместе с валом против часовой стрелки, а шестерня, находящаяся в постоянном зацеплении с шестернями, — по часовой стрелке. Если включить фрикцион, то вращение через шестерню передается шестерне и она вращается против часовой стрелки. На вал движение передается с шестерни И, жестко укрепленной на нем.
Движение от шестерни передается через вал и коническую передачу к находящимся в постоянном зацеплении цилиндрическим шестерням, установленным на подшипниках на поворотном валу и вертикальном валу ходового механизма.
Механизм поворота включается кулачковой муфтой. Платформу поворачивают так же, как это делают на экскаваторе Э-652А при обкатывании шестерни, жестко укрепленной на валу, по венцу с внутренним зацеплением, приваренному к раме ходовой части.
Ходовой механизм включаю! кулачковой муфтой. Кинематическая схема ходового механизма экскаватора 2Ы0011А не отличается от кинематических схем экскаваторов Э-652.А, и Э-1251А.
Экскаватор фиксируют на месте при работе управляемым стопором.
К особенностям кинематической схемы экскаватора Э-10011А относятся следующие:1) наличие турботрансформатора;2) стрелоподъемный механизм может работать одновременно с механизмом поворота платформы и независимо от него; передача движения стрелоподъемному механизму — шестеренная;3) механизм поворота платформы и передвижения экскаватора реверсируют цилиндрическими шестернями и ленточными фрикционами;4) рабочее оборудование прямой лопаты имеет зубчато-реечный (кремальерный) напорный механизм.
Таким образом, можно сделать вывод, что кинематические схемы, помещенные на рис. 44—48, отличаются одна от другой числом основных горизонтальных валов на поворотной платформе, конструкцией механизма реверса, конструкцией привода стрелоподъем-ного барабана, числом скоростей поворота платформы и передвижения экскаватора, а также возможностью опускать стрелу независимо от поворота платформы и одновременно с ним.
Последнее обстоятельство имеет существенное значение при работе с кранадьш оборудованием, так как маневрирование стрелой во время поворота платформы позволяет сокращать продолжительность рабочего цикла и, следовательно, увеличивать производительность крана.
Наличие двух скоростей поворота также улучшает эксплуатационные качества машины, так как при работе краном обычно нужно медленно поворачивать платформу, чтобы избежать сильного раскачивания груза, и достаточно точно его устанавливать. Две скорости передвижения позволяют, с одной стороны, сокращать время на перебазирование экскаватора собственным ходом по хорошей дороге (при большой скорости), а с другой стороны, сохранять хорошую проходимость (при малой скорости) в условиях бездорожья и на подъемах.
В современных экскаваторах широко применяют подшипники качения, что значительно увеличивает срок службы механизмов и снижает потери на трение в механизмах, передающих мощность от двигателя к рабочим органам. Некоторые готовящиеся к выпуску новые модели экскаваторов имеют подшипники качения также и в гусеничных тележках.
Лучшей кинематической схемой может считаться та, которая при наименьшем числе кинематических элементов (шестерен, валов, звездочек, цепей, кулачковых муфт, фрикционных механизмов и пр.) обеспечивает нужное в эксплуатации число скоростей поворота платформы и передвижения экскаватора, независимый привод стрелоподъемного барабана, возможность принудительного опуска” ния груза (крюка) на режиме двигателя, наименьшие потери на трение при передаче мощности от двигателя к главной лебедке (подъемному и тяговому барабанам) экскаватора, так как именно через эти барабаны и передается основная часть мощности при работе машины.

Рис. 49. Схема расположения механизмов экскаватора Э-4013:1 — двигатель, 2 —редуктор отбора мощности с гидравлическими насосами, 3 — редуктор реверса, 4— стрелоподъемная лебедка с г^дромотором, 5 — главная лебедка, 6 — конический редуктор передачи движения на ходовую часть, 7 — механизм поворота с гидромотором, 8 — раздаточный редуктор хода, 9 — редуктор привода главной лебедки, 10 — коробка перемены передач механизма передвижения
Выше были рассмотрены кинематические схемы экскаваторов, в которых все рабочие механизмы смонтированы непосредственно в металлоконструкции поворотной рамы.
Такие конструктивные решения дают возможность уменьшить вес машины, однако вызывают и существенные недостатки:– нарушение нормальных условий работы передач при деформациях поворотной рамы или основных валов (например, вала главной лебедки) под влиянием нагрузок при работе;– сложность использования агрегатного метода ремонта, так как замена изношенного или сломанного механизма (узла) требует разборки механизмов, что связано с большой затратой времени и не может быть выполнено в полевых условиях;– длительный процесс сборки машины при изготовлении ее на заводе, что требует значительного увеличения сборочных производственных площадей, особенно при современном крупносерийном выпуске экскаваторов;– практически невозможность добиться широкого применения унифицированных узлов на разных машинах.
В последние годы на универсальных экскаваторах все более широко применяют индивидуальный (многомоторный) дизель-элек-трический и дизель-гидравлический привод, позволяющие избежать этих недостатков.
На рис. 49 показано расположение агрегатов пневмоколесного экскаватора Э-4013 с гидромеханическим приводом. У этого экскаватора механический привод имеют главная лебедка и ходовая часть, гидравлический — механизм поворота и стрелоподъемная лебедка.
Между муфтой сцепления двигателя и редуктором реверса расположен редуктор отбора мощности, через который приводятся в движение два расположенных на нем насоса. От этих насосов и осуществляется гидравлический привод стрелоподъемной чебедки и механизма поворота.
Зубчатые передачи редуктора входят в состав главной трансмиссии экскаватора.
В редукторе — два выходных вала со шли-дезыми концами, на которых крепят головки двух карданных валов. Один из них соединяет передачи редуктора с передачами редуктора привода главной лебедки; второй, реверсируемый при помощи двух фрикционов редуктора, идет к коробке перемены передач. От этой коробки также при помощи карданного вала движение передается коническому редуктору, установленному на вертикальном валу ходовой части экскаватора, а от него через раздаточный редуктор к ходовым (переднему и заднему) мостам.
Преимущество такой конструкции экскаватора заключается в возможности демонтажа и замены даже в полевых условиях практически любого из этих узлов без разборки остальных. Кроме того, применение карданных валов и специального способа крепления редукторов удобно для сборки машины и повышает срок службы передач, так как при деформации поворотной рамы и основных валов не нарушается работа передач.
Читать далее: Главные муфты экскаватора
Категория: - Эксплуатация экскаваторов
Главная → Справочник → Статьи → Форум
stroy-technics.ru








423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)