 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Толкатель электромагнитный ТЭМ-30, ТЭМ-50, ТЭМ-80. Электромагнитный толкатель
Толкатели ТЭМ-30, ТЭМ-50, ТЭМ-80
Толкатель электромагнитный ТЭМ это гидравлически настроенные устройства, используемые в качестве привода пружинного тормоза колодочного типа, устанавливаемого в подъемно-транспортных установках и машинах. Предложенный тип толкателей может устанавливаться взамен электрогидравлических толкателей серии ТЭ.
Особенности толкателей ТЭМ
Толкатель ТЭМ-30, толкатель ТЭМ-50, толкатель ТЭМ-80 включают в свою конструкцию следующие основные узлы: модуль управления и электромагнит постоянного тока. Модуль управления может располагаться как непосредственно на корпусе толкателя, так и выноситься на расстояние до 50 метров и крепиться на корпусе оборудования, с которым работает толкатель. Коммутация между магнитом и управляющим модулем осуществляется при помощи специального кабеля. Для питания электромагнита может использоваться сеть с постоянным током и величиной напряжения от 220 В до 400 В.
Конструкция толкателя и принцип его работы позволяют выдерживать, в критических режимах, тяговое усилие, превышающее на 20% номинальное значение. Используемые в электронном блоке элементы владеют 3-кратным запасом по своим электрическим параметрам и могут выдерживать существенные перегрузки. Катушка электромагнита построена с использованием проводов, которые могут выдерживать нагревание до 2000С, а использование пропитки компаундом гарантирует оптимальный отвод тепла, влаго- и виброустойчивость прибора.
Принцип функционирования толкателя
По своему эксплуатационному режиму толкатели относятся к исполнительным системам мгновенного реагирования.
При поступлении рабочего напряжения на катушку толкателя, его блоком управления генерируется форсировочный импульс, посредством которого обеспечивается требуемое тяговое усилие для того, чтобы переместить шток в верхнюю точку, преодолев внешнюю нагрузку. Посредством этого процесса осуществляется растормаживание толкателя, и он будет находиться в таком положении, пока подается напряжение.
При отключении напряжения, под воздействием обратной пружины тормоза и веса якоря происходит возврат в начальное положение. Обслуживаемый толкателем механизм возвращается в исходное положение, а при повторной подаче напряжения рабочий цикл толкателя повторится.
amtorg.com.ru
21. Электромагнитные исполнительные устройства » Бауманки.НЕТ
Глава 21
ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
§ 21.1. Назначение электромагнитных исполнительных устройств
Исполнительные устройства в системах автоматики предназначены для приведения в действие (т. е. для привода) различных регулирующих органов, оказывающих непосредственное воздействие на объект управления с целью достижения выходной величиной этого объекта требуемого значения. Существует большое разнообразие регулирующих органов: для изменения подачи жидкостей и газов в трубопроводах устанавливаются заслонки, клапаны, шиберы и краны; в подъемно-транспортных устройствах это различные контакторы, муфты, тормоза, вариаторы скорости; в осветительных и нагревательных электроустановках это различные коммутационные аппараты.
Для воздействия па регулирующие органы необходимо выполнить механическую работу: повернуть заслонку или крап, соединить две половинки муфты, переместить шестерню на валу коробки передач, замкнуть контакты и т. д. Входным сигналом исполнительного устройства в электрических системах автоматики является электрический ток или напряжение, а выходным сигналом — механическое перемещение.
Для преобразования электрической энергии в механическую служат электромагниты и электродвигатели. В данной главе будут рассмотрены только электромагнитные исполнительные устройства. Электродвигатели являются электрическими машинами и изучаются в соответствующем курсе. Следует отметить, что почти всегда, когда ставится вопрос о разработке привода для регулирующего органа, приходится делать выбор между двумя вариантами: электромагнит или электродвигатель. Основное преимущество электромагнита — простота конструкции. У электродвигателя достоинств больше: высокий КПД, возможность получения любых скоростей и перемещений. Однако эти преимущества проявляются только в сравнительно сложных системах автоматики и при продолжительном режиме работы. При необходимости иметь небольшие перемещения (несколько миллиметров) и усилия (несколько десятков—сотен ньютон) электромагниты выгоднее, чем электродвигатель с редуктором.
В предыдущих главах уже рассматривались электромагниты, используемые как составная часть электромагнитных реле и контакторов. В данной главе будут рассмотрены общие вопросы классификации электромагнитов, их расчета, конструирования, применения в качестве исполнительных элементов систем автоматики.
§ 21.2. Классификация электромагнитов
В зависимости от вида тока в обмотке электромагниты подразделяют на электромагниты постоянного и переменного токов, по скорости срабатывания — на быстродействующие, нормальные и замедленного действия. По назначению электромагниты разделяют на приводные и удерживающие.
Приводные электромагниты служат для выполнения механической работы. При подаче питания они перемещают различные исполнительные устройства: клапаны, толкатели, заслонки, золотники, железнодорожные стрелки. Они перемещают контакты реле и контакторов, печатающие и перфорирующие устройства. Для выполнения этой работы электромагниты должны быть рассчитаны на определенную силу и перемещение.
Удерживающие электромагниты служат не для перемещения, а лишь для удерживания ферромагнитных деталей. Например, электромагнит, используемый при подъеме железного металлолома, только удерживает его, а перемещение осуществляется подъемным крапом. В этом случае, электромагнит выполняет лишь роль крюка подъемного крана. В металлообработке используются электромагнитные плиты для фиксации обрабатываемой детали на станке. Известны также электромагнитные замки. Поскольку удерживающие электромагниты не совершают работы, они рассчитываются лишь на определенное усилие. В некоторых случаях электромагнит имеет две катушки: одна, более мощная, используется для перемещения якоря, а другая — лишь для удерживания якоря в притянутом положении.
Велико разнообразие электромагнитов специального назначения. Они используются для фокусировки электронных пучков в телевидении, в ускорителях элементарных частиц, в разнообразных измерительных приборах, в медицинской аппаратуре и т. д.
По конструктивному выполнению различают клапанные (поворотные), прямоходовые и электромагниты с поперечным движением. Клапанные электромагниты имеют" небольшое перемещение якоря (несколько миллиметров) и развивают большое тяговое усилие.
Прямоходовые электромагниты имеют большой ход якоря и большее быстродействие; по размерам они меньше, чем клапанные. Часто они представляют собой соленоид (цилиндрическую катушку, втягивающую в себя ферромагнитный стержень), поэтому их иногда называют соленоидными электромагнитами.
Рис. 21.1. Варианты конструктивных схем электромагнитов
Различные конструкции электромагнитов показаны на рис. 21.1. Несмотря на большое их многообразие (далеко не все возможные конструкции показаны на этом рисунке), все они состоят из катушки 1, якоря (подвижного магнитопровода) 2, неподвижного магнитопровода (сердечника 3 и ярма 4). Кроме того, они имеют различные пружины, крепежные, фиксирующие и передающие детали, корпус. По конструкции магнитной цепи различают электромагниты с разомкнутым (рис. 21.1, г, е) и замкнутым магнитопроводом (рис. 21.1, а, б, в, д, ж, з). По форме магнитопровода различают электромагниты с П-образным, Ш-образным и цилиндрическим магнитопроводом.
Магнитопроводы электромагнитов постоянного тока обычно выполняются сплошными из магнитомягких материалов: обычных конструкционных сталей и низкоуглеродистых электротехнических сталей. Высокочувствительные электромагниты имеют магнитопровод из пермаллоев (сплавов железа с никелем и кобальтом). В быстродействующих электромагнитах стремятся к уменьшению вихревых токов, для чего используют электротехнические кремнистые стали с повышенным электрическим сопротивлением и шихтованный (наборный) магнитопровод.
Для уменьшения потерь на вихревые токи магнитопровод электромагнитов переменного тока собирают (шихтуют) из изолированных пластин толщиной 0,35 или 0,5 мм. В качестве материала используются горячекатаные и холоднокатаные электротехнические стали. Отдельные части магнитопровода, которые трудно выполнить шихтованными, изготовляют из сплошного материала толщиной 2—3 мм.
Катушки электромагнитов по своей конструкции бывают каркасные и бескаркасные, а по форме сечения — круглые и прямоугольные. Провод каркасной катушки наматывают па каркас из изоляционного материала (текстолит, гетинакс, пластмасса). Провод бескаркасной катушки наматывают прямо на сердечник, обмотанный изоляционной лентой, или па специальный шаблон. Для обеспечения прочности катушки, выполненной на шаблоне, ее обматывают лентой (бапдажируют) и пропитывают компаундным лаком. Катушки, как правило, наматывают медным проводом с изоляцией, выбираемой исходя из назначения и условий работы электромагнита.
В зависимости от способа включения различают последовательные и параллельные катушки. Параллельные катушки имеют большое число витков и наматываются тонким проводом. Обычно они включаются на полное напряжение сети. Последовательные катушки имеют сравнительно малое сопротивление, так как выполняются толстым проводом и с малым числом витков. Ток такой катушки определяется не ее сопротивлением, а зависит от тех устройств, с которыми катушка включена последовательно.
Различают также электромагниты, предназначенные для длительной, кратковременной и повторно-кратковременной работы.
§ 21.3. Порядок проектного расчета электромагнита
Исходными данными для расчета электромагнита обычно являются требуемое тяговое усилие Fэ, ход (или угол поворота) якоря и напряжение питания U. Кроме того, в задании на проектирование указываются режим работы электромагнита и условия эксплуатации. Могут быть заданы требуемые быстродействие, габариты, вес, стоимость.
В результате расчета необходимо выбрать конструкцию электромагнита, материал магнитопровода, определить геометрические размеры магнитопровода и катушки, обмоточные данные.
На первом этапе проектного расчета необходимо выбрать конструкцию электромагнита, используя понятие конструктивного фактора А. Эта величина определяется в зависимости от тягового усилия и хода якоря :
(21.1)
где — в Н; — в см.
При используют прямоходовый электромагнит соленоидного типа; при —прямоходовый с коническим стопой; при -прямоходовый с плоским стопом; при 2,6<<26 — с поворотным якорем клапанного типа.
Форму электромагнита выбирают с учетом необходимой тяговой характеристики. На рис. 21.2 показаны типичные тяговые
характеристики электромагнитов. Если необходимо иметь пологую тяговую характеристику 1, то следует применять прямоходовый электромагнит, если крутую 2 — клапанный электромагнит. Ш-образпая форма электромагнита (5) используется преимущественно в схемах переменного тока.
На втором этапе выбирается индукция и определяется сечение магнитопровода.
Сила притяжения якоря в основном создается магнитным потоком в воздушном зазоре. Поэтому при проектном расчете влияние на тяговую силу потоков рассеяния обычно не учитывается. Оптимальный магнитный поток и индукция в рабочем воздушном зазоре может находиться в весьма широких пределах и зависит от соотношения между тяговым усилием и величиной хода, т. е. от конструктивного фактора А. На рис. 21.3 приведены зависимости индукции от конструктивного фактора для трех конструкций электромагнитов (с плоским стопом, с коническим стопом, клапанного типа). После выбора по этим кривым индукции можно определить площадь сечения полюсного наконечника. Напомним формулу (17.13), связывающую тяговое усилие синдукцией в зазоре и сечением полюсного наконечника При определении диаметра сердечника необходимо предварительно задаться индукцией в стали и коэффициентом рассеяниямагнитной системы. Для мощных электромагнитовпринимается в пределах , для небольших магнитных систем реле — в пределах от . Коэффициент рассеяния Меньшие значения берутся при малых ходах якоря, большие — для перемещений в несколько сантиметров. Сечение сердечника определяется по формуле
(21.2)
Сечение ярма обычно принимается равным сечению сердечника , а сечение якоря — меньшим:
(21.3)
На следующем этапе определяются геометрические размеры электромагнита, связанные с размещением катушки. При протекании по катушке с числом витков тока катушка должна создать МДС, обеспечивающую индукцию в зазоре . Так как часть этой МДС теряется в паразитных зазорах и в стали магнитопровода, то следует учесть долю МДС, не участвующую в создании
Рис. 21.3. Зависимость индукции в зазоре электромагнита и размеров катушки от величины конструктивного фактора
требуемого тягового усилия. Введем коэффициент , представляющий собой отношение МДС, не участвующей в создании тягового усилия, к общей МДС катушки. Тогда, полагая проводимость воздушного зазора , определяем полную МДС катушки:
(21.4)
Ее можно уточнить при расчете магнитной цепи с использованием кривых намагничивания для выбранного материала магнитопровода.
Соотношение высоты обмоточного пространства катушки к его ширине обычно выбирается по конструктивному фактору (нижняя кривая на рис. 21.3). Конкретные размеры катушки выбирают на основании условий нагрева катушки. При этом учитываются режим работы, коэффициент теплоотдачи , способ намотки, влияющий на коэффициент заполнения , изоляция провода, определяющая допустимую температуру . Кроме того, необходимо учесть и возможность снижения напряжения питания до
С учетом этих факторов ширина обмоточного пространства катушки определяется по формуле
(21.5)
Зная размеры катушки, можно определить все размеры магнитопровода электромагнита: высоту сердечника и ярма, расстояние между ними и т. д.
§ 21.4. Особенности расчета электромагнитов переменного тока
В электромагнитах переменного тока индукция в магнитной цепи изменяется по синусоидальному закону. Так как максимальное (амплитудное) значение индукции враз больше действующего значения, а величина тягового усилия пропорциональна квадрату индукции, то электромагнит переменного тока при одинаковой степени насыщения магнитопровода развивает в два раза меньшее значение тягового усилия. Поэтому при определении конструктивного фактора для электромагнита переменного тока принимается удвоенное значение тягового усилия"
(21.6)
Оптимальные соотношения между высотой и шириной обмоточного пространства катушки t = h/a получаются меньшими, чем для электромагнитов постоянного тока. Поэтому катушки электромагнитов переменного тока будут короче и толще. Более короткая катушка уменьшает длину сердечника и его объем, что приводит к снижению потерь в стали, вызванных гистерезисом и вихревыми токами. Этих потерь не было в электромагнитах постоянного тока. Там стремились к уменьшению потерь в меди, что обеспечивалось уменьшением средней длины витка катушки за счет малой ее толщины. В электромагнитах переменного тока надо стремиться к уменьшению суммарных потерь (и в меди, и в стали).
При уточненном расчете электромагнитов необходимо учитывать потоки рассеяния и падения МДС в нерабочих зазорах и в стали. Кроме того, в электромагнитах переменного тока необходимо учитывать потери на гистерезис и на вихревые токи в магнитопроводе
Эти потери пропорциональны частоте питания, массе магнитопровода и индукции в квадрате. Для материалов, используемых в магнитной цепи электромагнита, в справочниках приводятся удельные потери (в зависимости от толщины листа и частоты) на единицу массы.
Число витков обмотки электромагнита переменного тока
(21.7)
Диаметр провода определяется по допустимой с точки зрения нагрева плотности тока. При этом ток определяется с учетом потерь в стали:
(21.8)
где —ток потерь в стали; —ток намагничивания.
Значения и можно определить с помощью электрической схемы замещения электромагнита (рис. 21.4). На схеме приняты следующие обозначения:—активное сопротивление обмотки;
— индуктивное сопротивление, соответствующее рабочему потоку; — индуктивное сопротивление, соответствующее потоку рассеяния; —активное сопротивление, обусловленное потерями в магнитопроводе на гистерезис и вихревые токи.
Если пренебречь падением напряжения на активном сопротивлении обмоткии потоком рассеяния, то ток потерь
(21.9)
Намагничивающий ток, создающий рабочий магнитный поток, определяется по МДС (). Если пренебречь падением МДС в стали и нерабочих зазорах, то
где—действующеезначение переменного магнитного потока в рабочем зазоре; —магнитная проводимость рабочего зазора.
Предварительный расчет электромагнита с короткозамкнутым витком проводится без учета экранирующего действия этого витка. Точный расчет параметров короткозамкнутого витка довольно сложен. На практике его выполняют из меди или латуни таким образом, чтобы он охватывал примернополюса электромагнита. При Ш-образном магнитопроводе короткозамкнутый виток 3 располагается на среднем (рис. 21.5, а) или на крайних стержнях (рис. 21.5, б). С витком на среднем стержне выполнены широко распространенные электромагниты серии МИС. Для уменьшения падения МДС в нерабочем зазоре между якореми сердечником 2 имеется так называемый воротничок 5. Номинальное тяговое усилие электромагнитов серии МИС изменяется от 15 до 120 Н при ходе якоря 15—30 мм. Механическая износостойкость составляет примерно 106 циклов включений-отключений.
С витками на крайних стержнях (рис. 21.5, б) вы полнены длинноходовые электромагниты серии ЭД. Они имеют Т-образный якорь 1. Тяговое усилие создается во всех трех стержнях, т. е. магнитная цепь содержит три рабочих зазора. Тяговое усилие электромагнитов серии ЭД достигает 250 Н при максимальном перемещении якоря до 40 мм. Электромагниты срабатывают при подаче тока в обмотку 4.
§ 21.5. Электромагнитные муфты
Электромагнитная муфта предназначена для передачи вращающего момента двигателя к рабочему механизму. Муфта состоит из двух частей: ведущей и ведомой, — которые образуют замкнутую магнитную систему. Муфта выполнена из ферромагнитных материалов и имеет одну или несколько обмоток возбуждения.
Различают фрикционные муфты и асинхронные (индукционные) муфты. Во фрикционных муфтах передача вращения происходит за счет силы трения между ведущей частью, закрепленной на валу электродвигателя, и ведомой частью, которая может перемещаться вдоль вала рабочего механизма на шлицах или шпонке. При подаче тока в обмотку возбуждения создается магнитодвижущая сила и подвижная часть муфты прижимается к неподвижной. Такая муфта работает как электромагнит. Для передачи значительных моментов используются многодисковые конструкции электромагнитных муфт. Как на ведущем, так и на ведомом валу имеется несколько стальных дисков, которые под действием МДС притягиваются друг к другу и благодаря трению их поверхностей передается вращение. Соприкасающиеся поверхности фрикционных муфт выполняют из специального материала — сплава фер-радо, имеющего коэффициент трения в 3—4 раза больший, чем у стали.
Различают конструкции электромагнитных фрикционных муфт с неподвижной катушкой электромагнита и с вращающейся катушкой.
В маломощных муфтах (рис. 21.6, а) ведущая 1 и ведомая 2 полумуфты не имеют обмоток, но одна из них (обычно ведомая) может перемещаться вдоль вала по шпонке или шлицам. Обе муфты окружены неподвижной катушкой электромагнита 3, которая при подключении к напряжению создает магнитный поток. Возникающие электромагнитные силы прижимают ведомую полумуфту к ведущей. Момент трения между полумуфтами должен быть больше момента нагрузки на ведомом валу. При отключении катушки муфты неподвижная полумуфта отжимается от подвижной с помощью пружины (на рисунке не показана). Обычно эта же пружина прижимает полумуфту к тормозным поверхностям, что
обеспечивает быструю остановку ведомого вала. В мощных муфтах (рис. 21.6, б) для увеличения величины передаваемого момента в подвижной части муфты используется несколько стальных дисков 2, имеющих свободу перемещения вдоль оси вращения ведущего и ведомого валов. Соответствующее количество стальных дисков 1 жестко закреплено на ведущем валу. На этом же валу закреплена катушка электромагнита 3, подача тока к которой осуществляется с помощью контактных колец и щеток. Электромагнитные силы притягивают подвижные диски к неподвижным. Большая площадь соприкосновения обеспечивает большой момент трения.
В электромагнитных муфтах с ферромагнитным наполнителем (рис. 21.6, в) передача вращения осуществляется за счет того, что зазор между ведомой 1 и ведущей 2 полумуфтами заполнен смесью 4 из зерен ферромагнитного материала и наполнителя. При пропускании тока через катушку 3 муфты создается магнитный поток, заставляющий ферромагнитные зерна ориентироваться вдоль силовых линий и образовывать мостики, связывающие ведущую и ведомую полумуфты. Зерна ферромагнитного материала имеют размеры от 4 до 50 мкм. Наполнитель может быть сухим (тальк, графит) или жидким (трансформаторные и силиконовые масла, фтористые соединения).
Электромагнитные муфты с ферромагнитным наполнителем более надежны, чем фрикционные, имеют меньшее время срабатывания (до 20 мс). Необходима регулярная смена наполнителя.
В электромагнитных индукционных муфтах передача вращающего момента происходит за счет индукционных токов, т. е. без непосредственного механического соприкосновения обеих частей муфты. Одна из частей муфты (рис. 21.7) имеет электромагнитные полюсы 1 с обмоткой возбуждения, питаемой постоянным током. Она называется индуктором и конструктивно выполнена подобно ротору синхронного генератора. Другая часть муфты имеет короткозамкнутую. обмотку 2, аналогичную роторной обмотке .асинхронного двигателя. Эта часть называется якорем. При вращении индуктора в обмотке якоря наводится ЭДС и идет ток. Взаимодействие этого тока с магнитным потоком возбуждения
создаст электромагнитный момент, приводящий во вращение якорь. В муфте происходят те же физические процессы, что и в асинхронном электродвигателе. Разница заключается в том, что вращение магнитного поля в двигателе происходит при подаче трехфазного переменного тока в обмотку неподвижного статора, а в муфте вращение магнитного поля происходит за счет механического вращения индуктора, возбужденного постоянным током. Так же как и в асинхронном двигателе, вращающий момент возникает лишь при неодинаковой скорости индуктора и якоря. Ведомая часть муфты вращается с частотой , где
— частота вращения ведущего вала,—скольжение. Величина скольжения обычно составляет
Если момент нагрузки приводного механизма оказывается больше максимального момента муфты, то происходит опрокидывание— вращение ведомой части прекращается. Благодаря способности к опрокидыванию муфта может защитить приводной двигатель от больших перегрузок. Величина вращающего момента, передаваемого муфтой, зависит от магнитного поля возбуждения. Изменяя ток возбуждения, можно регулировать величину критического момента муфты. Разница в скоростях вращения ведомой и ведущей частей асинхронной муфты принципиально необходима для создания вращающего момента на ведомой части. Поэтому асинхронные муфты называют еще электромагнитными муфтами скольжения. Они получили наибольшее распространение в качестве элемента регулируемого автоматизированного электропривода переменного тока, включающего помимо муфты нерегулируемый электродвигатель и систему автоматического регулирования тока возбуждения муфты. К достоинствам такого привода с муфтой скольжения относятся простота устройства и эксплуатации, низкая стоимость, высокая надежность. Но с увеличением скольжения растут потери мощности и КПД привода снижается.
studizba.com
Тормозные электромагниты и электрогидравлические толкатели крана
Строительные машины и оборудование, справочник

Категория:
Грузоподъемные краны предприятий
Тормозные электромагниты и электрогидравлические толкатели кранаДля открывания тормозов механизмов грузоподъемных кранов (дополнительного сжатия силовых замыкающих пружин) в зависимости от конструкции тормозов применяют специальные тормозные магнитные или электрогидравлические толкатели.
Для управления работой тормоза типа ТКТ созданы тормозные электромагниты типа МО-Б (магнит однофазный), отличающиеся малым ходом якоря (короткоходовые), работающие на переменном токе промышленной частоты и приспособленные для крепления к одному из рычагов тормоза.
Короткоходовой тормозной электромагнит МО-Б состоит из магнитопровода, включающего обмотку возбуждения (катушку), и якоря.
Рис. 88. Крановый короткоходовой тормозной электромагнит типа МО-Б
Ярмо и якорь набраны из листов активной электротехнической стали и соединены заклепками. Однофазная катушка надета на ярмо и закреплена на нем крышкой с четырьмя болтами. Концы проводов катушки выведены на клеммы. В нерабочем (поднятом) положении якорь удерживает силовая пружина тормоза. При подаче напряжения на клеммы катушки в ярме возникает магнитный поток, притягивающий якорь. При повороте якорь упором давит на шток тормоза и смещает его влево. Соотношение плеч (длины якоря и места приложения усилия к штоку) обеспечивает выигрыш усилия примерно в 6 раз, что позволяет дополнительно сжать силовую пружину тормоза.
Освободившаяся вспомогательная сжатая пружина 13, развивающая в зависимости от типоразмера тормоза усилие 20…60 Н, давит одним концом на рычаг, а другим через торец скобы на рычаг и разводит их, т.е. обеспечивает^ отвод обоих колодок от шкива. Кроме того, освободившийся рычаг отходит от шкива под -действием изгибающего момента, создаваемого весом электромагнита, закрепленного на рычаге эксцентрично его продольной оси. Для ограничения Действия этого момента на рычаге установлен кронштейн с регулируемым упорным болтом, обеспечивающий равные зазоры между тормозными колодками и шкивом.
Рис. 89. Одноштоковый электрогидравлическмй толкатель типа ТГМ-50
К недостаткам указанных магнитов относят резкое включение, сопровождающееся ударом якоря об ярмо и вызывающее большие динамические нагрузки на детали тормоза и механизма, быстрое нарастание тормозного момента, повышенный шум и вибрации, малое число включений — не более 300 ч-1 при ПВ = 40%, малый срок службы, сложность технического обслуживания и пр.
В связи с этим в современных грузоподъемных кранах широко применяют тормоза типа ТКГ с электрогидравлическими толкателями типа ТЭГ или ТГМ. Электрогидравлический толкатель — это независимый механизм, преобразующий электрическую энергию через гидравлическую в механическую поступательно движущегося штока. Электрогидротолкатель состоит из корпуса, в котором размещены электродвигатель с лопастным центробежным колесом на валу, образующий центробежный насос, поршень со штоком и цилиндр (рис. 89). Корпус заполнен рабочей жидкостью гидропривода РЖГ. В нижней части корпуса имеется проушина для крепления толкателя к основанию тормоза и пробка для слива РЖГ при замене. В крышке имеется заливное отверстие и установлены уплотнительные манжеты.
При включении электродвигателя толкателя центробежный насос подает РЖГ в подпоршневое пространство и поршень под действием избыточного давления плавно поднимается. В это время РЖГ из надпоршневого пространства по каналам между цилиндром и поршнем перетекает в подпоршневое пространство. При этом связанный с поршнем шток, преодолевая сопротивление силовой пружины, поворачивает двуплечий рычаг против часовой стрелки и открывает тормоз. При выключении электродвигателя насос останавливается, и поршень под воздействием внешней нагрузки и собственного веса опускается в исходное положение.
Избыточное давление РЖГ в современных конструкциях электрогидротолкателей не превышает 0,1 МПа во избежание вспенивания ее при обратном ходе поршня. Большинство конструкций электрогидротолкателей имеют один шток, а толкатель ТГМ-160Б с усилием 1,6 кН тормозов с моментом 500… 1250 Н-м имеет два штока.
К преимуществам электрогидравлических толкателей в сравнении с электромагнитами относят возможность регулирования времени срабатывания тормоза, плавное нарастание тормозного момента, большое число включений — до 2000 ч~1, высокую долговечность, простоту эксплуатации, бесшумность, меньший расход меди и пр. Однако наличие РЖГ требует высокой степени точности изготовления деталей, надежных уплотнений и осложняет эксплуатацию электрогидротолка- теля при низких температурах. Отклонение оси электрогидравлического толкателя от вертикали не должно превышать 0,25 рад.
Читать далее: Дополнительное электрооборудование кранов
Категория: - Грузоподъемные краны предприятий
Главная → Справочник → Статьи → Форум
stroy-technics.ru
Электрогидравлический толкатель - Большая Энциклопедия Нефти и Газа, статья, страница 4
Электрогидравлический толкатель
Cтраница 4
Электрогидравлический толкатель приводится в действие от электродвигателя. Действие электрогидравлического толкателя передается на колодки тормоза через систему рычагов. При вращении крыльчатки давлением жидкости поршень поднимается, возвратные пружины 5 сжимаются и направляющие штоки, соединенные вверху с рычажной системой тормоза, отводят колодки от шкива. [46]
Электрогидравлический толкатель показан на фиг. Электрогидро-толкатель присоединяется в нижней части проушиной 1 к раме тормоза, а в верхней части - проушиной 9 к верхнему рычагу ( позиция 10 на фиг. Электродвигатель толкателя соединен параллельно с электродвигателем подъемного механизма. При включении двигателя подъемного механизма включается и двигатель толкателя, насос 3 ( фиг. Давление жидкости, образующееся под поршнем, вынуждает поршень 4 вместе с направляющими штоками 5 и траверсой 8 перемещаться вверх. Траверса толкателя 8, будучи связана с верхним рычагом 10 ( фиг. Во время работы насоса под поршнем создается постоянное давление, которое удерживает траверсу в верхнем положении, а тормоз в расторможенном состоянии. [47]
Двухштоковые электрогидравлические толкатели требуют повышенной точности изготовления, чтобы не происходило заклинивания поршня. Поэтому более совершенной моделью являются одноштоковые толкатели ( рис. 96, б), выпускаемые отечественной промышленностью. В этом толкателе электродвигатель 1 размещен в нижней части корпуса 2 и погружен в рабочую жидкость - масло АМГ-10 или специальную жидкость ПМС-20 и ПГ-271, что обеспечивает лучшие условия охлаждения двигателя и возможность его более интенсивного использования. [48]
Одноштоковые электрогидравлические толкатели более надежны, чем двухштоковые, так как в конструкции с одним штоком исключаются возможные при двух штоках заедания. Электрогидротолкатели допускают до 720 включений в час, время их срабатывания составляет 0 6 - 1 5 сек и может быть увеличено до 12 сек. Вместе с тормозом Электрогидротолкатели используются иногда для целей подрегулирования скорости привода крана. [50]
Преимуществом электрогидравлических толкателей по сравнению с электромагнитами является плавная работа привода с большим числом включений в час; высокая износоустойчивость элементов; простота эксплуатации, резкое уменьшение пусковых токов; возможность изменения регулировочными клапанами времени срабатывания тормоза в широких пределах; меньшие расходы меди. [51]
Недостатками электрогидравлических толкателей являются изменение времени опускания и подъема поршня в зависимости от окружающей температуры вследствие изменения вязкости рабочей жидкости; трудность обеспечения необходимых уплотнений, предотвращающих вытекание рабочей жидкости, особенно при отклонении толкателя от вертикального положения; существенное уменьшение подъемной силы толкателя при отклонении его от вертикального положения; замедленное ( по сравнению с электромагнитным приводом) срабатывание толкателя, что приводит к увеличению времени замыкания и размыкания тормоза. [52]
Достоинствами электрогидравлических толкателей по сравнению с электромагнитами являются плавная работа привода тормоза, возможность более частых включений, высокая износостойкость, простота эксплуатации, резкое уменьшение пусковых токов, возможность изменения регулировочными клапанами времени срабатывания тормоза в широких пределах, меньшие расходы меди. [53]
Преимуществом электрогидравлических толкателей является плавное торможение и значительная сила, развиваемая на поперечине. [54]
Преимущества электрогидравлических толкателей следующие: 1) постоянство тяговой силы; 2) плавность и быстрота включения и выключения; 3) возможность совершать большое число включений ( до 600 в час), что не может быть достигнуто при применении электромагнитов. [56]
Электродвигатель электрогидравлического толкателя тормоза ТКТГ-300 Мб грузовой лебедки подключен параллельно с электродвигателем Ml грузовой лебедки. Катушки электромагнитов YB5 и YB4 тормозов механизма передвижения подключены одним проводом к фазе статора электродвигателя МЗ через вспомогательные контакты КМ5 и КМ6, а вторым проводом - к нулевому проводу. Катушки электромагнитов YB3 и YB2 тормоза механизма поворота подключены к нулевому проводу и через вспомогательные контакты КМЗ, КМ4 или КМ12 к фазам электродвигателя поворота. Тормозной электромагнит YB3 включается только со второго положения контроллера, а в первом положении выключен и притормаживает шкив, обеспечивая плавный разгон и остановку тормозной системы. Электродвигатель Мб тормоза стреловой лебедки питается через контакты промежуточного реле КА2, причем, если реле включено, электродвигатель тормоза Мб питается параллельно со статором электродвигателя М5 стреловой лебедки. [57]
Однако и электрогидравлические толкатели имеют недостатки. Так, наличие рабочей жидкости требует обеспечения надежного уплотнения и создает неудобства в эксплуатации при низких температурах. [59]
Электромагнит и электрогидравлический толкатель при размыкании тормоза перемещают на величину хода ( или угла поворота) якоря, преодолевая усилие замыкающего груза или пружины, пропорциональное рабочему усилию тормоза. Выбор тормозного электромагнита или электрогидравлического толкателя производится исходя из равенства работы, совершаемой электромагнитом на его ходе, и произведения рабочего усилия тормоза на установочный зазор. [60]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Магнитогидравлический толкатель
ОПИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советскими
Социалистически к
Республик р,763242 (61) Дополнительное к авт. сеид-ву(51) М. Кл.3 (22) Заявлено 10. 05. 78 (21) 2614638/29-11
В 66 0 5/26 с присоединением заявки Мо—
Государственный комитет
СССР по делам изобретений н открытий (23) Приоритет
Опубликовано. 150980 Бюллетень йо 34
Дата опубликовани я описания 17 . 09. 80 (53) УДК 621. .866(088.8) (72) Автор изобретения
С.Г. Бицадзе
Грузинский ордена Ленина и ордена Трудового КраСного
Знамени политехнический институт им. В.И. Ленина (71) Заявитель (54) МАГНИТОГИДРАВЛИЧЕСКИЙ ТОЛКАТЕЛЬ
Изобретение относится к грузоподьемному оборудованию и может быть использовано для привода тормозов эскалаторов, конвейеров и других механизмов, работающих в режиме про- 5 должительного включения.
Известен магнитогидравлический толкатель, содержащий корпус с двумя взаимосвязанными между собой обеими полостями гидроцилиндрами разных диаметров, шток поршня меньшего из которых соединен с исполнительным органом, а корпус большего охвачен кольцевой катушкой электромагнита (1) .
Недостатком такого толкателя является то, что его невозможно использовать в режиме продолжительного включения, так как он быстро выходит из строя в связи с перегревом 2р катушки электромагнита.
Целью изобретения является повышение надежности и безопасности работы в режиме продолжительного включения. 25
Для этого предлагаемый толкатель снабжен смонтированными на корпусе дополнительным электромагнитом,-на якоре которого закреплен подпружи- .ненный фиксатор, и конечными выклю- Зр чателями, электрически связанными один с катушкой электромагнита толкателя, а другой — с катушкой электромагнита фиксатора, при этом шток выполнен с выступом, взаимодействующим с фиксатором и снабжен закрепленным в его верхней части упором, взаимодействующим с конечными выключателями.
С целью обеспечени ручного управления положением фиксатора, якорь электромагнита фиксатора снабжен рукояткой.
На фиг. 1 схематично изображен предлагаемый толкатель, разрез; на фиг. 2 — электрическая схема включения электродвигателя исполнительного механизма, электромагнитов толкателя, фиксирующего устройства и их конечных выключателей; на фиг. 3 верхняя часть корпуса магнитогидравлического толкателя с фиксирующим устройством, разрез; на фиг. 4— то же, при включенном фиксирующем устройстве.
Толкатель содержит корпус 1, в нижней части которого помещена катушка 2 электромагнита постоянного тока. В катушке 2 смонтирована направляющая труба 3 из немагнитного
763242 материала, выполняющая функцию гидравлического цилиндра, в которой подвижно установлен поршень 4 большого диаметра, являющийся одновременно и якорем электромагнита. В корпусе выполнен масляный резервуар
5 с центральной трубой 6, представляющий собой второй гидравлический цилиндр, в котором перемещается второй поршень 7 малого диаметра, соединенный штоком 8 с исполнительным
10 механизмом. Шток имеет выступ 9 для фиксатора и упор 10 для конечных выключателей. Рабочее пространство
A через отверстия 11 соединено с подпоршневой полостью Б поршня 7. Посредством трубы 12 через вентиль 13 масляный резервуар 5 соединен с полостью В под поршнем 4. К масляному резервуару 5 прикреплен электромагнит
14, якорь 15 которого имеет с одной стороны фиксатор 16 20 а с другой стороны — ручку 18 механического снятия фиксации. В верхней части корпуса 1 толкателя закреплены конечные выключатели 19 электромагнита фиксатора и 20 электромагнита толкателя.
Нажимом на кнопку 21 пуска (фиг.2) магнитный пускатель 22 получает питание, самоблокируется, в .результате чего подключается к сети электродви" гатель 23 исполнительного механизма и выключается катушка 2 электромагни та толкателя (ЭМТ). При включении поршень 4 начинает подниматься, вытесняя жидкость из рабочего пространства A в полость под поршнем 7 через отверстие З5
11, создавая избыточное давление, вследствие чего поршень 7 вместе с жестко связанным с ним штоком 8 поднимается на величину рабочего хода.
В этот момент фиксатор 16 окажется 4Q выше выступа 9 и благодаря профилю выступа 9 с помощью пружины 17 фиксируется в верхнем рабочем положении, при этом упор 10, перемещаясь со штоком 8,освобождает конечный выключатель 19 фиксирующего устройства, а его электромагнит 14 ЭМФ не включается, так как цепь его прервана нормально закрытым контактом, 24 магнитного пускателя. Упор 10 при крайнем верхнем положении штока 8 нажимает на конечный выключатель 20, в результате чего прерывается цепь питания электромагчита толкателя, и толкатель выключается. В этом положении привод готов для работы в режиме продолжительного включения.
Электродвигатель 23 исполнительного механизма функционирует, катушка 2 электромагнита выключена, шток 8 зафиксирован, и фиксирующее устрой- ф) ство готово к включению для снятия фиксации при обратном ходе штока толкателя.
Для остановки приводного двигателя 23 нажимается кнопка 25 управления у
"стоп". Магнитный пускатель 22 теряет питание, электродвигатель 23 отключается и нормально замкнутым контактом 24 включается электромагнит 14, так как конечный выключатель
19 освобожден и якорь 15 вместе с фиксатором 16 притягивается, и фиксатор 16, сжимая пружину 17, выходит из зацепления с выступом 9, чем освобождается шток 8, и он под действием внешней нагрузки возвращается в нижнее исходное положение. При этом упор 10 освобождает конечный выключатель 20, но катушка 2 электромагнита не включается, так как магнитный пускатель 22 обесточен и erо нормально открытый контакт
26 в цепи оТкрывается. При опускании штока 8; в исходное положение упор 10 нажимает на конечный выключатель 19,:и электромагнит фиксирующего устройства выключается, после чего вся система приходит в исходное положение и готова для следующего цикла работы в режиме продолжительного включения. Толкатель питается постоянным током через выпрямитель
27.
Предлагаемый магнитогидравлический толкатель позволяет использовать его для тормозов эскалаторов, конвейеров и для привода других механизмов, работающих в режиме продолжительного включения, и заменить применяемые для этой цели электрогидравлические толкатели, являющиеся как более сложными конструктивно по сравнению с магнитогидравлическими толкателями, так и менее надежными в эксплуатации вследствие наличия изнашивающихся вращающихся деталей.
Формула изобретения
1., Магнитогидравлический толкатель, содержащий корпус с двумя взаимосвязанными между собой обеими полостями гидроцилиндрами разных диаметров, шток поршня меньшего из которых соединен с исполнительным органом, а корпус большего охзачен кольцевой катушкой электромагнита, о т -л и ч а ю щ и й.с я тем, что, с целью повышения надежности и безопасности работы в режиме продолжительного включения, он снабжен смонтированными на корпусе дополнительным электромагнитом, на якоре которого закреплен подпружиненный фиксатор, и конечными выключателями, электрически связанными один.с катушкой электромагнита толкателя, а другой— с катушкой электромагнита фиксатора, при этом шток выполнен с выступом, взаимодействуиицим с фиксатором и снабжен закрепленным в его верхней части упором, взаимодействующим с конечными выключателямй.
763242
2. Толкатель по п. 1, о т л и— ч а ю шийся тем, что, с целью обеспечения ручного управления поло.женнем фиксатора, якорь электромагнита фиксатора снабжен рукояткой.
Источники информации, принятые во внимание при экспертиэе
1. Патент Австрии М 202738, кл. 35 в, 11, 1962 (прототип) 763242
®ue.2 акаэ тираж Подписное
ВИИИПИ Государственного комитета СССР па делам изобретений .и .открытий ..
113035 Москва З-35 Раушская наб. . 4 5 илиал ППП Патент, г. жгород, ул. Проектная, Составитель Н.. Тютюнникав
Ре акто М. Ха итонова Текред М.Левицкая Ко кто Е. Папп




www.findpatent.ru
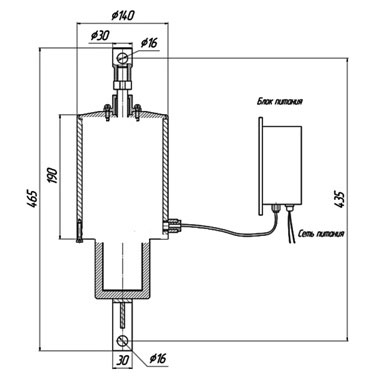
Толкатель электромагнитный ТЭМ-30, ТЭМ-50, ТЭМ-80 в Москве
Толкатели электромагнитные ТЭМ (далее толкатели) предназначены для привода пружинных колодочных тормозов типа ТКГ подъемно-транспортных машин и механизмов и могут применяться взамен электрогидротолкателей типа ТЭ.
Толкатели рассчитаны на работу от сети трехфазного переменного тока 380В частотой 50 Гц через блок управления.
Гарантийный срок: для толкателей, работающих в закрытых помещениях — 3 года с момента ввода в эксплуатацию и 2 года для толкателей, установленных на открытых рабочих площадках, но не более 6000 ч общей продолжительности работы.
Эксплуатация и конструкция
Толкатели состоят из следующих основных конструктивных элементов: магнит постоянного тока и блок управления. Блок управления может крепиться как непосредственно к корпусу толкателя, так и отнесен от него на расстояние от 1м до 50м с креплением на конструкции оборудования с которым используется электромагнит путем кабельного присоединения.
Электропитание толкателя осуществляется через сеть переменного тока напряжением от 220 до 440В.
Все остальные вышеперечисленные толкатели имеют одинаковый принцип действия и отличаются только размерами.
Толкатель своей конструкцией и принципом действия обеспечивает превышение номинального тягового усилия на 20% при критических режимах работы.
Примененные в блоке управления радиоэлементы имеют 3-4-х кратный запас по электрическим параметрам.
Применение провода с рабочей температурой до 200 °С и пропитка катушки компаундом обеспечивает достаточную виброустойчивость, влагоустойчивость и отвод тепла.
При подаче напряжения на толкатель блок управления вырабатывает импульс форсировки, который обеспечивает номинальное тяговое усилие и ход штока толкателя до верхнего положения, преодолевая внешнюю нагрузку. Таким образом происходит растормаживание. Шток толкателя находится в верхнем положении до тех пор, пока подается напряжение.
При снятии напряжения с толкателя блок управления обесточивает обмотку и под действием пружины исполнительного механизма (тормоза) и собственного веса якорь перемещается в первоначальное положение(нижнее). Обслуживаемый механизм приводится в исходное положение.
При подаче питающего напряжения вновь, цикл работы толкателя повторяется.
Толкатели электромагнитные относятся к исполнительным механизмам мгновенного действия.
Основные преимущества
- Упрощенное техническое обслуживание, не требующее демонтажа.
- Не требует применения дорогой рабочей жидкости.
- Повышенная пыле и влагозащита, позволяющая надежно работать в условиях загрязненной рабочей атмосферы.
- Малое энергопотребление в режиме удержания.
- Запас тяговых характеристик при критических значениях напряжения питающей среды
- Малая зависимость работоспособности от низких и высоких температур окружающей среды.
- Не требует применения комплекта ЗИП для герметизации штока и корпуса.
- Возможность контроля за работой толкателя и, следовательно, тормозного механизма в кабине оператора подъемно-транспортного механизма (при вынесенном блоке).
- Наличие сигнального блока-контакта (при комплектации) позволяет не допустить выход из строя основного электродвигателя подъемно-транспортного механизма.
| Наименование параметра | Тип толкателя электромагнитного | ||
| ТЭМ-30 | ТЭМ-50 | ТЭМ-80 | |
| Номинальное толкающее усилие, кг, не менее ном./мах | 30/35 | 50/60 | 80/90 |
| Ход штока, мм | 30-50 | 45-55 | 50-65 |
| Время подъема штока на тормозе, с, не более | 0,25 | 0,4 | 0,55 |
| Время обратного хода штока совместно с рычагом тормоза(нерегулируемое), с, не более | 0,35 | 0,35 | 0,4 |
| Потребляемая мощность в режиме форсированного вкл. (t=1,5 сек), Вт, не более | 900 | 1050 | 1500 |
| Потребляемая мощность в рабочем режиме, Вт, не более | 35 | 50 | 90 |
| Номинальное напряжение питающей сети, В | 220 | 380, 440 | 380, 440 |
| Число включений в час, циклов в час, не более | 720 | 300-600 | 300-600 |
| Продолжительность включений ПВ при ном. режиме, % | 60 | 100-60 | 100-60 |
| Масса толкателей, кг, не более | 18 | 24 | 35 |
Структурное обозначение
ТЭМ-Х-Х1-Х2-Х3-Х4
ТЭМ — Толкатели электромагнитные;
- Х - номинальное толкающее усилие, кг;
- Х1 — порядковый номер модификации;
- Х2 — блок выносной, встроенный
- Х3 — наличие сигнального блока контактов;
- Х4 — климатическое исполнение (У, ХЛ, Т) и категория размещения по ГОСТ 15150-69.
skidkosnab.ru
Тормозные электромагниты и электрогидравлические толкатели электрических кранов
Строительные машины и оборудование, справочник
Категория:
Мостовые электрические краны
Тормозные электромагниты и электрогидравлические толкатели электрических крановДля управления механическим тормозом служит электромагнит, разжимающий колодки и освобождающий тормозной шкив при прохождении тока через обмотку магнита. При отключении электромагнита от сети отпадает его якорь и происходит затормаживание под действием груза или пружины. При любом отключении электродвигателя, как аварийного, так и преднамеренного, колодки или лента тормоза автоматически приходят в действие. Тормоз также приходит в действие и в случае срабатывания конечных выключателей при переходе крайних положений.
В зависимости от рода тока тормозные электромагниты изготовляются следующих типов:1) переменного трехфазного тока — тип КМТ;2) переменного однофазного тока — тип МО;3) постоянного тока — тип КМП, ВМ, МП и А.
Тормозные электромагниты изготовляются короткоходовыми и длинноходовыми.
Ходом электромагнита называется расстояние, на которое перемещается подвижная часть электромагнита при включении и отключении тока. Величина хода у разных электромагнитов колеблется в пределах от 10 до 150 мм.
При установке электромагнитов стремятся использовать неполный ход магнита, чтобы оставался запас не менее 10% в нижнем положении якоря для возможности его опускания по мере срабатывания колодок.
Тормозные электромагниты постоянного тока изготовляются для параллельного или последовательного соединения с электродвигателем. Электромагнит постоянного тока типа КМП (рис. 1) представляет собою стальной или чугунный цилиндр, внутри которого помещена катушка и подвижный якорь из мягкой стали. На нижней части корпуса имеются лапы для крепления к механической части тормоза. Для того чтобы сила тяги в начале и в конце движения якоря была равномерной, сердечник магнита и противолежащий ему упор на крышке делают конической формы.
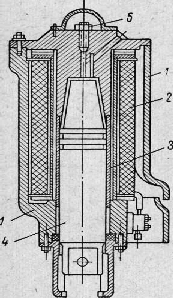
Рис. 1. Тормозной электромагнит постоянного тока типа КМП: 1 — корпус; 2 — катушка; 3 —направляющая немагнитная втулка; 4 — подвижной якорь; 5 — винт успокоителя (буфера)
Сердечник свободно скользит в направляющей втулке из немагнитного металла. Для смягчения ударов служит воздушный буфер. Ток подводится к клеммной коробке в нижней части корпуса.
Катушки электромагнитов параллельного включения делаются из тонкой изолированной проволоки с большим числом витков и обладают большой индуктивностью. Поэтому к зажимам такого электромагнита подключается гасящее или разрядное сопротивление, предназначенное для ( снижения величины перенапряжений, возникающих при его отключении.
Электромагниты последовательного включения не требуют разрядного сопротивления, они имеют катушку из толстой проволоки с малым числом витков. По конструкции они не отличаются от электромагнитов параллельного включения. Эти электромагниты имеют один существенный недостаток, ограничивающий их применение: изменение тока двигателя при подъеме различных грузов влечет за собой изменение и втягивающего усилия.
В связи с этим, они регулируются на срабатывание при самом малом токе двигателя. Номинальное тяговое усилие магнитов параллельного включения гарантируется при падении напряжения до 10%.
Тормозные электромагниты переменного тока типа КМТ являются длинноходовыми и применяются для грузовых тормозов.
Магнитопровод трехфазного магнита похож на сердечник трехфазного трансформатора. Он набирается из листов трансформаторного железа для уменьшения потерь от вихревых токов. Верхняя часть магнитопровода неподвижна, укреплена на корпусе, а нижняя может двигаться и во включенном состоянии плотно прижимается к верхней (рис. 2). Чугунный корпус состоит из двух частей, соединенных между собой болтами. На верхней части сердечника укреплены три катушки. Выводы катушек подводятся к клеммному щитку, установленном на боковой стенке корпуса. Сердечник может свободно перемещаться в вертикальном направлении; при своем движении он давит на шток находящегося внутри цилиндра плотно пригнанного к нему поршня. В свою очередь, поршень при своем движении сжимает воздух в цилиндре, что смягчает удары при включении и отключении магнита.
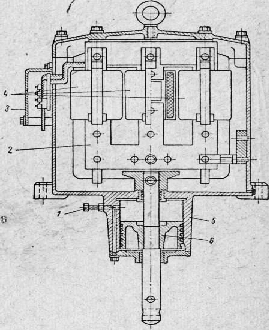
Рис. 2. Тормозной электромагнит трехфазного тока типа КМТ: 1 — регулировочный винт буфера; 2 — подвижная часть; 3 — клеммная коробка; 4 — катушки; 5 — цилиндр воздушного буфера; 6 — поршень буфера
Регулировка работы воздушного буфера производится винтом изменяющим при завинчивании сечение воздушного канала, соединяющего полости над поршнем и под. поршнем. Для сцеплений штока магнита с механическими деталями тормоза в нем сделано два отверстия,, расположенных под углом 90° относительно друг друга.
При втягивании подвижной части сердечника в ее крайнем положении зазор между подвижной и неподвижной частями должен отсутствовать. Попадание грязи и пыли на торцовые части сердечника ведет к образованию зазора, сердечник плотно не смыкается, вследствие чего ток резко возрастает и катушки будут перегреваться, что может привести к их перегоранию.
Тормозные электромагниты однофазного переменного тока типа МО имеют одну катушку, насаженную на неподвижную часть магнитопро-вода (рис. 3). Подвижная часть отжимается от неподвижной специальной пружиной. При включении катушки возбуждается магнитный поток, подвижная часть притягивается к неподвижной, преодолевая силу пружины, и нажимает на шток тормоза.
При отключении тока подвижная часть отходит от неподвижной под действием пружины, тормоз закрывается и механизм затормаживается.
Для устранения вибрации в магнитах типа МО применяют успокоитель в виде короткозамкнутого витка или кольца из толстой медной проволоки, вставленного в пазы подвижной части магнитопровода. Под действием переменного магнитного потока в этом витке индуктируется своя Электродвижущая сила и возникает довольно значительный ток, протекающий по короткозамкну тому витку. Благодаря его наличию электромагнит работает спокойно, без шума. При разрыве короткозамкнутого витка тормозной магнит будет сильно гудеть. Иногда неопытные крановщики или монтеры при ремонте снимают короткозамкнутый виток, как «лишнюю» деталь, что совершенно недопустимо.
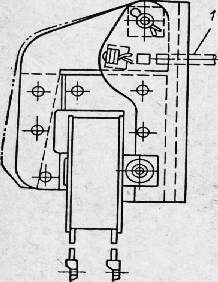
Рис. 3. Тормозной электромагнит однофазного тока
(Пунктиром показано положение электромагнита в отключенном состоянии).
При тяжелом и весьма тяжелом режимах работы применение электромагнитов типа МО нежелательно ввиду их быстрого износа. В этих случаях устанавливают магниты постоянного тока типа МП и А, питаемые от выпрямителя.
У всех электромагнитов постоянного и переменного тока имеется существенный недостаток: в начале движения якоря, когда требуется наибольшее усилие, магниты дают наименьшее усилие, а в конце хода, когда требуется уменьшение усилия для ослабления удара, магнит развивает наибольшую силу.
У тормозных электромагнитов переменного тока могут сгореть катушки, если магнит включен, а сердечник не замкнулся по какой-либо причине (например, вследствие перекоса или заклинивания, а также при попадании грязи на поверхности ярма и сердечника). Ток при незамкнутом сердечнике будет в несколько раз больше, чем при замкнутом.
В настоящее время все большее распространение на кранах с тяжелым и весьма тяжелым режимом работы получают распространение электрогидравлические толкатели, обладающие большей надежностью, чем электромагниты.
Кроме плавного торможения они позволяют регулировать скорость крановых механизмов. Для этого двигатели толкателей подключают к ротору приводного двигателя, который питает толкатель током пониженной частоты, и поэтому толкатель развивает неполное число оборотов, вследствие чего тормоз открывается неполностью, механизм лишь притормаживается.
На рис. 4 приведен разрез электрогидравлического толкателя. Электрогидравлический толкатель состоит из двигателя и гидравлического насоса, расположенного в корпусе, в нижней части которого имеется поддон. Внутри корпуса насоса помещается золотник, крыльчатка насоса и поршень, с которым скреплен шток, выходящий наружу из корпуса через специальные сальники.
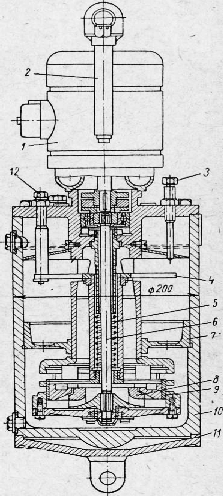
Рис. 4. Гидравлический толкатель
При подаче напряжения на двигатель вращается вал. Крыльчатка насоса, вращаясь, создает избыточное давление в золотниковой коробке, вследствие чего золотник поднимается и открывает доступ рабочей жидкости.
Рабочая жидкость перекачивается из пространства над поршнем под него и поднимает поршень вверх.
При отключении двигателя насос останавливается, поршень под действием внешней нагрузки и собственного веса опускается вниз и жидкость вытекает в верхнюю часть цилиндра.
Когда поршень придет в крайнее нижнее положение, возвратная пружина опустит золотник вниз и закроет золотниковое отверстие.
Ход поршня вверх, а следовательно, и время работы электро-гидротолкателя при подъеме тормозных колодок регулируется шпилькой, которая ограничивает ход крестовины вверх. Золотники вследствие этого неполностью открывают отверстия, и движение штоков замедляется.
Ход поршня вниз регулируется шпилькой с удерживающим кольцевым выступом, также замедляющим движение штока.
Электрогидравлические толкатели допускают до 720 включений в час, время их срабатывания составляет от 0,6 до 1,5 сек, но может быть доведено до 12 сек.
Электрогидравлические толкатели соединяются с тормозной системой так же, как и тормозные электромагниты.
Читать далее: Конечные выключатели электрических кранов
Категория: - Мостовые электрические краны
Главная → Справочник → Статьи → Форум
stroy-technics.ru









423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)