 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Механизм передвижения крана мостового типа. Механизм передвижения крана мостового
МЕХАНИЗМ ПЕРЕДВИЖЕНИЯ КРАНА — Мегаобучалка
Механизмы передвижения крана обычно выполняют с центральным (рис. 3, 4) или раздельным приводом (рис. 5).
| Рис. 3. Механизм передвижения с тихоходным валом | Рис. 4. Механизм передвижения с быстроходным валом | ||
| Рис. 5. Механизм передвижения с раздельным приводом | |||
При центральном расположении привода для уменьшения перекоса моста крана электродвигатель установлен примерно в средней части моста, и на приводные колеса вращение передается через трансмиссионный вал. В раздельном приводе (рис. 5) для каждого приводного ходового колеса имеется индивидуальный электродвигатель.
Механизмы передвижения с центральным расположением привода могут быть выполнены с тихоходным (рис. 3) и быстроходным (рис. 4) трансмиссионными валами.
Механизм передвижения с тихоходным валом применяют в мостовых кранах общего, специального назначения и особенно для мостов решетчатой конструкции при длине пролета м; он имеет электродвигатель 6, редуктор 5, трансмиссионный вал, выполненный из нескольких одинаковых секций 4, соединенных между собой и с концами выходного редуктора, а также с валами ходовых колес зубчатыми муфтами 1 и полумуфтами 3. Трансмиссионный вал опирается на промежуточные опоры 2, число которых должно быть согласовано с числом зубчатых муфт 1 или полумуфт 3.
Механизм передвижения с быстроходным трансмиссионным валом 8 имеет частоту вращения, равную частоте вращения соединенного с ним вала электродвигателя 6, установленного в средней части моста, от конца трансмиссионного вала вращение передается на два редуктора 5, а затем на ходовые колеса 7.
Быстроходный вал в отличие от тихоходного имеет меньшую массу (в 4-6 раз) и меньший диаметр (в 2-3 раза), но его применение требует высокой точности монтажа и динамической балансировки вращающихся частей. Использование быстроходных валов для крановых мостов рекомендуют при длине пролета более 15-20 м. Для предотвращения резонанса быстроходные валы должны иметь частоту вращения , отличную от критической, в следующих пределах: при работе в докритической зоне , при работе в закритической зоне . Критическую частоту можно приближенно определять , где диаметр вала в мм, – длина между опорами вала в м ( м).
Механизмы передвижения с раздельными приводами имеют по одному приводу для каждой стороны моста, состоящему из электродвигателя 6 с тормозом 9, редуктора 5, соединенного с приводными ходовыми колесами. Электродвигатели рассчитывают (каждый на 60% общей требуемой мощности) с учетом возможности неравномерности их загрузки.
В мостовых кранах механизмы передвижения с раздельным приводом применяют в пролетах более 15 м.
megaobuchalka.ru
Механизм передвижения крана мостового типа
МЕХАНИЗМ ПЕРЕДВИЖЕНИЯ КРАНА МОСТОВОГО ТИПА, содержащий двигатели, кинематически соединенные с приводными колесами ходовых тележек , механическими тормозами с ириводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми моментами инерции кинематически соединены с 1 fe . J грузовой тележкой крана, имеющей воз .можнось перемещения по пути, отличающийся тем, что, с целью повьциения надежности уменьшения перекоса моста крана, он снабжен направляющей балкой, расположенной вдоль пути грузовой тележки крана, отклоняющими блоками, установ .1С11Н1)1мп на металлоконструкции крана по обе стороны балки, гибкими органами, одни концы которых связаны с фИВОДНЫМИ звеньями механических тормозов, в средней части 11|бкие органы соединены с указанными блоками, а на других концах гибких органов подвешена направляющая балка, которая снабжена рычага.ми, одни концы которых 1нарнирно соединены с грузовой тележкой крана, а другие концы обоих рыш (Л чагов yciaHOB.icHbi друг на друге с перекрытием , н роликом, смонтированным на перекрыгом рычаге и установленным на направляющей балке, причем рычаг с перекрывающим концом снабжен б, механизма подъема гру.чоноГ TC.IOKKH. о ел о: со Фа. 1
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК
3
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К ABTOPCHOMY СВИДЕТЕЛЬСТВУ Ф)),ЙФ:Ь" М °
CO 3
Ю
Cb
ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ (21) 3508038/29- ! (22) 03.11.82 (46) 07.02.84. Бюл. № 5 (72) Е. С. Кузнецов, Ф. М. Мухамедшина, М. В. Меринова и В. М. Таугер (71) Уральский ордена Трудового Красного
Знамени политехнический институт им. С. М. Кирова (53) 621.874 (088.8) (56) 1. Авторское свидетельство СССР № 616222, кл. В 66 С 9/16, 05.07.76 (иротип). (54) (57) МЕХАНИЗМ ПЕРЕДВИЖЕН((Я
КРАНА МОСТОВОГО ТИПА, содерж31ций двигатели, кинематически соединенные с приводными колесами ходовых теле.кек кр itl3, механ ически ми тор моза ми с ири вод11ы ми звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми момеllтами инерции кинематиче. ки соединены с
„„SU„„1071569 А грузовой тележкой краны, имек)щей возможное ь перемещения ио пути, отличаюuI тем, что, с целью повышения надежное) и и) тем уменьшения перекоса моста крана, ои снабжен направляюгцей балкой, располож IIII0II вдоль пути грузовой тележкр;и13. 0TI лоияю1ц11)lи блоками, новлсииыми на металлоконструкции крана по обе стороны балки, гибкими органами, одни концы которых связаны с приводными звеньями механических тормозов, в средней части п1бкис органы с1)сдинены с указанными олоками, 3 на других концах гибких органов подвешена 11311 p313ляюи)ая балка, которая снабжена рычагами, одни концы которых 1иарнирно соединены с грузовой
TE 1e)Ii KOI1I кр ) н 3, 3 ) p) 1 ив !iOII LI hI 06OHX pblчагов установлены друг на друге с перекрытием, и роликом. с l()IITllpoB3HHhlì иа перекрь 1ом рычаге и установленным на наfIp3B;iÿoLLLåé балке, 1;ричем рычаг с перекрывающим концом снаб.кен блок1))1 Ioхаиизма
ПОДЪЕМ и ГР 3
107!569
Изобретение относится к подъемно-транс è ðïþìó машиностроению, а именно к механизмам передвижения кранов мостового тины.
Известен механизм передвижения крана мостового типа, содержащий двигатели, кинематически соединенные с приводными колесами ходовых тележек крана, механическими тормозами с приводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья махоВНКоВ с регулируемыми моментами инерции кинематически соединены с грузовой тележкой крана, имеющей возможность перемещения по пути (1).
Недостатком известного механизма является сравнительно низкая надежность, обусловленная отсутствием информации о весе груза при управлении механизмом.
Цель изобретения — повышение надежности механизма путем уменьшения перекоса моста крана.
Указанная цель достигается тем, что механизм передвижения крана мостового типа, содержащий двигатели, кинематически соединенные с приводными колесами ходовых тележек крана, механическими тормозами с приводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми моментами инерции кинематически соединены с грузовой тележкой крана, имеющей возможность перемещения по пути, снабжен направляющей балкой, расположенной вдоль пути грузовой тележки крана, отклоняющими блоками, установленными на металлоконструкции крана по обе стороны балки, гибкими органами, одни концы которых связаны с приводными звень ями механических тормозов, в средней части гибкие органы соединены с указанными блоками, а на других концах гибких органов подвешена на правляющая балка, которая снабжена рычагами, одни концы которых шарнирно соединены с грузовой тележкой крана, а другие концы обоих рычагов установлены друг на друге с перекрытием, и роликом, смонтированным на перекрытом рычаге и установленным на направляющей балке, причем рычаг с перекрывающим концом снабжен блоком механизма подъема грузовой тележки.
На фиг. 1 изображена кинематическая схема механизма передвижения крана мостового типа; на фиг. 2 грузовая тележка крана, вид спереди; на фиг. 3 кинематическая связь рычага с механическим тормозом.
Механизм передвижения крана мостового типа содержит двигатели 1 и 2, соединенные через редукторы 3 и 4 с приводными колесами 5 и 6 ходовых тележек 7 и 8 крана, с механическими тормозами 9 и !О, выполненными с приводными звеньями 11 и 12 и с маховиками 13 и 14 с регулируемыми моментами инерции, подвижные звенья 15 и 16 которых посредством гибких связей 17 и 18 соединены с грузовой тележкой 19, перемещающейся по пути вдоль моста крана.
Блок 20 механизма подъема тележки 19 смонтирован на рычаге 21, шарнирно установленном вместе с рычагом 22 на тележке
19 H перекрывающим Нос. te H É.
На рычаге 22 закреплен ролик 23, опирающийся на направляющую балку 24, расположенную вдоль пути тележки 19 и соединенную с двух сторон с помощью гибких органов 25 и 26 с приводными звенья25 ми 11 и 12 тормозов 9 и 10. Гибкие органы
25 и 26 связаны с отклоняющими блоками
27 и 28, смонтированными на металлоконструкции крана.
Механизм передвижения крана мостового типа работает следующим образом.
При перемещении тележки 19 вдоль пути с помощью гибких связей 17 и 18 изменяется момент инерции маховиков 13 и 14. В зависимости от веса груза и положения тележки !9 на приводные звенья l! и 12 тор35 мозов 9 и 10 со стороны блока 20 механизма подъема действует соответствующее по величине усилие, что позволяет уменьшить тормозной момент тормоза со стороны нагруженной ходовой тележки 8 и увеличить со стороны разгруженной ходовой тележки
40 7, благодаря чему стабилизируется движение крана независимо от положения грузовой тележки 19 и веса груза.
Таким образом, механизм передвижения крана в неустановившемся и установившемся режимах позволяет равномерно загружать приводы ходовых тележек, что снижает перекос моста крана, повышает точность остановки крана и erо надежность.
1071569
Составитель А. Гедеонов
Редактор Т.Митейко Техред И. Верес !(орректор А.Ференц
Заказ 11560/17 Тираж 82% Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 1 3035, Москва, Ж вЂ” 35, Раушская наб., д. 4/5
Филиал ППП «Патент>, г. Ужгород, ул. Проектная, 4



www.findpatent.ru
Механизмы передвижения кранов бывают двух типов
Механизмы передвижения кранов обеспечивают их перемещение в определенных пределах. Движение может осуществляться в горизонтальном направлении или по наклонным рельсам. Механизмы передвижения обычных и спецтехники с тележкой имеют схожую конструкцию, поэтому техническое обслуживание кранов не вызывает значительных затруднений для специалиста. У мостового крана механизм передвижения выполнен в нескольких вариантах – с приводными колесами, либо с цепной или канатной тягой. В случае с колесами элементы механизма расположены на передвигающейся тележке или раме, во втором случае электродвигатель размещен вне пределов тележки.
Устройство механизмов передвижения
На большинстве мостовых кранов применяют механизмы передвижения, оснащенные приводными колесными тележками. Сюда также входят электрический двигатель, система передач, движущаяся часть. В зависимости от вида привода различают механический и ручной тип передвижения. Если привод ручной, то грузоподъемность такого крана не превышает пятнадцати тонн, а длина пролета не более пятнадцати метров. Оснащенные электрическим приводом краны имеют гораздо большую производительность и грузоподъемность.
Главным определяющим моментом практически для всех мостовых кранов, помимо скорости, считается количество колес на передвижном механизме, оно, как правило, рассчитывается в зависимости от размеров и характеристик самого крана. Но в любом случае их диаметр не должен быть более одного метра. Естественно, что при этом максимальная нагрузка будет ограничена. Для кранов грузоподъемностью в 50 тонн ходовых колес предусмотрено четыре, до 80 тонн – восемь, а в 160 и более тонн – шестнадцать колес.
Если количество колес превышает четыре, то нужно применять балансиры, чтобы равномерно распределять нагрузку. Это несколько увеличивает сочлененные концевые балки и высоту самой конструкции. Сами механизмы передвижения кранов включают мотор-редуктор, смонтированный прямо на валах ходовых колес. Оснащаются колеса роликовыми подшипниками качения бочкообразной формы. Для металлургических предприятий, а также для кранов большой грузоподъемности применяется трансмиссия. При этом каждый механизм передвижения оснащается буферными устройствами.
Для качественной и безопасной работы необходимо обеспечить максимальную плавность хода , точность позиционирования груза и бесступенчатое регулирование скорости передвижения. Добиться этого можно за счет установки приводов частотных преобразователей. Также необходимо обеспечить безопасность работы как самого оператора крана, так и других людей, работающих в непосредственной близости и нужно не забывать о ремноте крановых путей и техническом обслуживании кранов и своевременном обслуживании крановых установок. Для этого на передвижном и подъемном механизмах устанавливаются концевые выключатели – они не допускают съезда крана с рельсов и вовремя останавливают подъемный механизм.
Смотрите также:
Все статьи
kr-tver.ru
Механизм передвижения мостового крана
0 Il И C А Н И Е 185029
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советских
Социалистических
Республик
Зависимое от авт, свидетельства №
Заявлено 08. IV.1965 (№ 1001614/27-11) с присоединением заявки №
Приоритет
Опубликовано ЗО.VII.1966. Бюллетень № 16
Дата опубликования описания 16.IX.1966
Кл. 35Ь, 1/03
МПК В 66с
УДК 621.874,629.11.011.1 (088.8) Комитет по делам изобретений и открытий при Совете Министров
СССР
Авторы изобретения
Заявитель
В, Е. Гора, П. Н. Рыбкин и А. Ю. Шпигель
Всесоюзный научно-исследовательский институт подьетйнотранспортного машиностроения ь (г )H;, (МЕХАНИЗМ ПЕРЕДВИЖЕНИЯ МОСТОВОГО КРАНА
Известны механизмы передвижения мостового крана, состоящие из приводных и неприводных пневматических ходовых колес и направляющих горизонтальных обрезиненных роликов, смонтированных на концевых балках крана.
Описываемый механизм отличается от известных тем, что ступицы ходовых колес расположены на полых осях. Последние закреплены в стенках концевых балок с помощью шаровых опор, которые выполнены регулируемыми в вертикальной плоскости.
Закрепление горизонтальных роликов на эксцентричных валах позволяет при движении крана изменять зазор между роликами и подкрановыми балками.
Все это упрощает конструкцию механизма и увеличивает срок службы ходовых колес и роликов, На фиг. 1 изображен описываемый мостовой кран с механизмами передвижения в двух проекциях; на фиг. 2 — ходовое колесо; на фиг. 3 — горизонтальный ролик.
Ходовая часть крана состоит из восьми ходовых пневматических колес 1 типа автомобильных (два из них — приводные). Каждое колесо жестко заделано в концевых балках 2 без каких-либо балансирных тележек. Это объясняется тем, что пневмоколеса, деформируясь под действием приложенных к ним сил, компенсируют неточности изготовления конструкции и одновременно касаются подкрановых балок.
Ходовое колесо ступицей 8 опирается на полую ось 4. В ней проходит приводной вал
5, который передает крутящий момент от привода на ступицу колеса.
Ось 4 смонтирована в концевой балке 2 с помощью шаровых опор б, дающих возмож10 ность посредством винтового устройства 7 изменять угол наклона колес к опорной поверхности, создавая так называемый развал колеса.
Такое регулирование развала колес необ15 ходимо в связи с тем, что в процессе эксплуатации вследствие деформации моста крана колеса вынуждены отклоняться от своего вертикального положения, что приводит к одностороннему износу покрышки колеса.
Для предупреждения этого колеса заранее устанавливаются с таким расчетом, чтобы при какой-то оптимальной нагрузке они заняли вертикальное положение.
25 Для восприятия горизонтальных перемещений крана поперек пролета цеха в нем предусмотрены четыре горизонтальных ролика 8 с обрезиненными ободами 9. Ролик смонтирован на эксцентричном вертикальном валу И
30 закрепленном на концевой балке 2 крана.
185029
Такое выполнение вала обеспечивает регулировку зазора между роликом и подкрановой балкой 11.
Предмет изобретения
Механизм передвижения мостового крана, состоящий из приводных и неприводных пневматических ходовых колес и направляющих горизонтальных обрезиненных роликов, смонтированных на концевых балках, отличаюбийся тем, что, с целью упрощения конструкции и увеличения срока службы колес и роликов, ступицы колес расположены на полых осях, закрепленных в стенках концевых балок
5 посредством регулируемых в вертикальной плоскости шаровых опор, а горизонтальные ролики укреплены на эксцентричных вертикальных валах, что позволяет при движении крана изменять зазор между роликами и под10 крановыми балками.
1Ь5029
Составитель В. Гаврилов
Техред Г. Е. Петровская
Корректор Г. Е. Опарина
Редактор Джарагетти
Типография, пр. Сапунова, 2
Заказ 2718/5 Тираж 1550 Формат бум. 60X90 /8 Объем 0,41 изд. л. Г1одписное
ЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССР
Москва, Центр, пр. Серова, д. 4




www.findpatent.ru
Механизм передвижения мостового кран;»
ОП ИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОР СИОМУ СВИДЕТЕЛЬСТВУ
Сок>а Соеетекнт
Социалистически) Республик
Зависимое от авт. свидетельства о
Заявлено 13.Х.1967 (№ 1190742i27-11) с присоединением заявки, №
Приоритет
Опубликовано 22Х1.1972. Бюллетень )х" 20
Дата опубликования описания 8Х111.1972
М. Кл. В 66с 9 00
Номитет по делам иаобретемий и открытий при Совете (>лимкстров
СССР
У11, 0>21.874:629.11. .0 I 1.1(088.8) Anторы изобретения Б. M. Крылов, Г. П. Кулешов, П. И. Каяйкин и Н, Н. Карасев
Заявитель Ленинградский металлический завод имени XXII съезда КПСС
МЕХАН ИЗ
Известны механизмы передвижения мостовых кранов с безребордными колесами и боковыми направляющими роликами.
Предлагаемый механизм отличается от известных тем, что ролики попарно вмонтированы на осях в каретки, нс связанныс с ходовыми колесами и съсмпа прикрепленные к боковым частям торцов крана.
Механизмы в таком выполнении пригодны для установки как на вновь создаваемых, так и на действующих кранах, при этом нагрузка на ролики уменьшается.
Чтобы удержать кран в рабочем поло)кении при поломке одной из осей роликов, стенку корпуса каждой каретки, с помощью которой эти каретки крепятся к крану, целесообразно удлинять так, чтобы в прикрепленном к крану виде опа была опущена ниже уровня головки рельса подкряновых путей и в зоне расположения этого рельса имела
П-образный паз.
Для регулирования расстояния между направляющими роликами и рельсом подеряноBbIx путей оси роликов могут быть вмонтированы в съемные кронштейны, которые прикрепляются к корпусу каретки через мерные прокладки.
Кронштейны целесообразно Выполнять псреставпыми относите,пьно корпуса каретки для изменения установочного размера мсж7у парями роликов.
С целью уменьшения габаритны
i, T (>1 |ТЬ i CÒ!1
5 павлспы II3 fio;Iliilllllllli
ИЯ фпг, ) — 2 изображ дВ >х п)>0(ец!1Я; 1 I!i ф llг. 3 — — е 3 Р(те Xlc:
|ЧСХЯППЗМ ПСРЕДВИжСППЯ М;СТОВОГО «РЯНЯ т содержит безрсбардные ео Iccà 2 и:;яретеп 3 с баеовы:(|и н ап р явл lfofir!I. I II po Ill
15 крана при помощи балтов и сварен. 1,ранштсйны 6, имеющие отверстия для усгя;! >BI!l асей 7 роликов.
3 ядll515! CTCIIIBhlx I» 1 (!l и п зоне этого рельса имеет 11-абра.:«I,> fi ! Я е слУ511,7, Iff ",!(. *;>не (|(|(и
ЕР31! 2 В C;I) Ч ЯЕ ПОЛО \|КП OCII PO, I II
25 .(|алого расстояния от Осп рсл(,ся(!(> л ны
IIcx |1 пл!1 еа 1 Он пы н 2 РУ)1С|В.Е(! I 1 f5!, IÒO !!O3hO, |5!(Т !I(Р(ВО I!! I h ЕР !!Ih! I 1 (>(Зf)C(>! >>,IIII IC еа icc3 в пролетах.
247483
Во время установки механизма и в процессе эксплуатации его можно регулировать расстояние между роликами и рельсом за счет предусмотренных мерных прокладок 10, устанавливаемых между кронштейнами и кор- 5 пусом. Установка корпуса каретки сбоку торца крана позволяет увеличить установочную базу колес крапа на 1800 — 2000 л>л, вследствие чего значительно снижается нагрузка па боковые ролики н улучшаются условия для 10 осзопасной эксплу3THII,nn Крап3.
Расстояние мс>кду роликами и рельсом pef) лнрустся с учетом фактичсского состояния эксплуатируемых рельсовых путей, причем наружныс ролики нагру>каются незначитсль- 15 но. Вся нагрузка в основном распределяется на ролики, установленные с внутренней стороны крана.
1(онструкцня механизма позволяет переводить на безребордные колеса действующие 20 мостовые краны разной грузоподъемности независимо от того установлены краны на колесах с подшнпннкамн качения нли скольжения.
П р е-д м 0 т. -„и 3 о б р е т е н и я
1. Механизм передвижения мостового крана с безреборднйми колесами н боковыми направляющими роликами, отличающийся 30 тем, что, с целью "применения его как на вновь создаваемых, так и на действующих кранах и уменьшения при этом нагрузок на ролики, ролики эти попарно вмонтированы на осях в каретки, не связанные с ходовыми колесами и съемно прикрепленные к боковым частям торцов крана.
2. Механизм по и, 1, отличающийся тем, что, с целью удержания крана в рабочем положении при поломке одной из осей роликов, стенка корпуса каждой каретки, с помощью которой эти каретки крепятся к крану, удлинена так, что в прикрепленном к крану виде она опущена ниже уровня головки рельса подкрановых путей и в зоне расположения этого рельса имеет П-образный паз.
3. Механизм по пп. 1 и 2, отличающийся тем, что, с целью регулирования расстояния между направляющими роликами и рельсом подкрановых путей, оси роликов вмонтированы в съемные кронштейны, прикрепляемые к корпусу каретки через мерные прокладки.
4. Механизм по пп. 1 — 3, отличи>ощийся тем, что, с целью изменения установочного размера между парами роликов, кронштейны выполнены переставными по отношению к корпусам кареток.
5. Механизм по пп. 1 — 4, отличающийся тем, что, с целью уменьшения габаритных размеров кареток, внутренние ролики их установлены на подшипниках качения, а нару>кные — на подшипниках скольжения.
247483
Составитель А. Новожилов
Техред Л. Куклина
Корректор А. Васильева
Редактор В. Борисова
Типография, пр. Сапунова, 2
Заказ 2481/7 Изд. № 1063 Тираж 406 Подписное
11НИИПИ Комитета по делам изобретений и открытия при Совете Министров СССР
Москва, 5К-35, Раушская наб., д. 4/5




www.findpatent.ru
РАЗДЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ МОСТОВОГО КРАНА
Изобретение относится к грузоподъемным машинам, в особенности, к электроприводу с асинхронными двигателями переменного тока, которые используются в мостовых, козловых кранах, применяемых в различных отраслях промышленности. Может быть использовано для выравнивания нагрузок между приводами механизма передвижения крана.
Если в подъемном кране используется раздельный привод, при котором каждая концевая балка моста приводится в движение своим самостоятельным приводом, причем между приводами, расположенными на различных концевых балках, не предусматривается дополнительная связь кроме самой металлоконструкции (смотри, например, Александров М.П. Подъемно-транспортные машины: Учебник для вузов. - 5-е изд., перераб. и доп. - М.: Высш. школа, 1979. 558 с.), где на стр.258 описана работа такого механизма, согласно которому «если на одну из опорных (концевых) балок моста нагрузка меньше, чем на другую, то скорость вращения двигателя первой опоры несколько увеличивается и эта опора начинает забегать относительно второй, более нагруженной опоры. Но при этом забегании первый двигатель начинает воспринимать через металлоконструкцию моста повышенную нагрузку, разгружая двигатель второй опоры, что приводит к уменьшению скорости первого двигателя и соответствующему увеличению скорости второго двигателя. При этом скорости движения обеих опорных балок моста автоматически выравниваются. Таким образом, в процессе движения крана с раздельным приводом происходит перераспределение нагрузок между обоими двигателями за счет нагружения металлоконструкции моста в горизонтальной плоскости и за счет сил сцепления ведущих колес с рельсами.
Исследование механизмов передвижения с раздельным приводом показывает, что этот привод обеспечивает нормальную работу кранов при отношении пролета крана к его базе не более 6. При величине этого отношения более 6 отмечается повышенная упругая деформация моста крана и значительные забегания одной концевой балки относительно другой (при расположении тележки с грузом около одной из концевых балок). Для обеспечения нормальной работы крана в этом случае необходимо значительно повысить жесткость моста в горизонтальной плоскости, что связано с утяжелением моста, что весьма нежелательно.
Для выравнивания хода опор при индивидуальном асинхронном приводе некоторое применение нашла система синхронного вращения (электрического вала) в которую включаются двигатели ходовых тележек. Такое решение поставленной задачи позволяет получить синхронное вращение двигателей, однако оно не может устранить расхождение опор, вызванное неодинаковым износом колес ходовых тележек, пробуксовыванием и т.п. По указанным причинам и вследствие относительной сложности синхронного вращения не получили широкого распространения в электроприводе передвижения мостов портальных кранов, (смотри, например, стр.187 в книге Соколов М.М. Автоматизированный электропривод общепромышленных механизмов, М., «Энергия», 1969, изд. 2-е переработанное и дополненное. 544 с. с илл.
Техническим эффектом изобретения является выравнивание нагрузок между двигателями, для повышения КПД и повышения надежности работы крана.
Для достижения указанного технического эффекта предлагается осуществлять привод первого из ходовых колес от асинхронного электродвигателя с фазным ротором, а другое ходовое колесо от асинхронного короткозамкнутого электродвигателя, причем статорные обмотки второго электродвигателя подключены к роторным обмоткам первого через согласующий трансформатор, коэффициент трансформации которого равен коэффициенту приведения статорной обмотки к обмотке ротора.
Суть предложения поясняется чертежом. Привод механизма передвижения мостового крана, включающий ходовое колесо 1, которое через редуктор 2 получает вращение от асинхронного электродвигателя с фазным ротором 3, к роторной обмотке которого через согласующий трансформатор 4, подключена статорная обмотка асинхронного короткозамкнутого электродвигателя 5, вращающего через редуктор 6 ходовое колесо 7. При этом коэффициент трансформации согласующего трансформатора 4 равен коэффициенту приведения роторной обмотки к статорной обмотке.
Электропривод работает следующим образом: при подаче напряжения питающей сети на статорные обмотки электродвигателя 3, в обмотках его ротора наводится напряжение, которое, увеличенное согласующим трансформатором 4 до напряжения питающей сети, подается на статорные обмотки асинхронного электродвигателя 5. При этом происходит запуск электродвигателей 3 и 5 в соответствии с законами электротехники. После запуска электродвигатели 3 и 5 соответственно через редукторы 2 и 6 приводят во вращение ходовые колеса 1 и 7 и развивают вращающие моменты в соответствии с моментами сопротивления на колесных парах. При равенстве моментов сопротивления электродвигатели развивают одинаковые моменты и вращаются с одинаковой скоростью. Если же равенство моментов нарушается (например, при изменении, от износа, диаметра колеса), то на ходовом колесе, у которого диаметр больше, будет и больше момент сопротивления, (например, у колеса 1). Это приведет к тому, что вращающий момент и скольжение электродвигателя 3 увеличится, а частота вращения уменьшится. Одновременно с этим рост скольжения приведет к тому, что частота тока в роторе электродвигателя 3 увеличится и увеличится частота питающего напряжения, подаваемого на статор электродвигателя 5, что приведет к увеличению частоты вращения вала электродвигателя 5, что, в свою очередь, увеличит момент сопротивления на второй колесной паре до достижения равенства нагрузок на колесных парах.
Таким образом, предлагаемое соединение обмоток асинхронных электродвигателей позволяет выравнивать нагрузки на ходовых колесах.
Раздельный электропривод механизма передвижения мостового крана, включающий ходовые колеса с редукторами, получающими вращение от асинхронных электродвигателей, отличающийся тем, что одно из ходовых колес получает вращение от асинхронного электродвигателя с фазным ротором, а другое ходовое колесо получает вращение от асинхронного короткозамкнутого электродвигателя, статорная обмотка которого подключена к роторной обмотке первого двигателя через согласующий трансформатор, коэффициент трансформации которого равен коэффициенту приведения обмотки статора к обмотке ротора первого двигателя.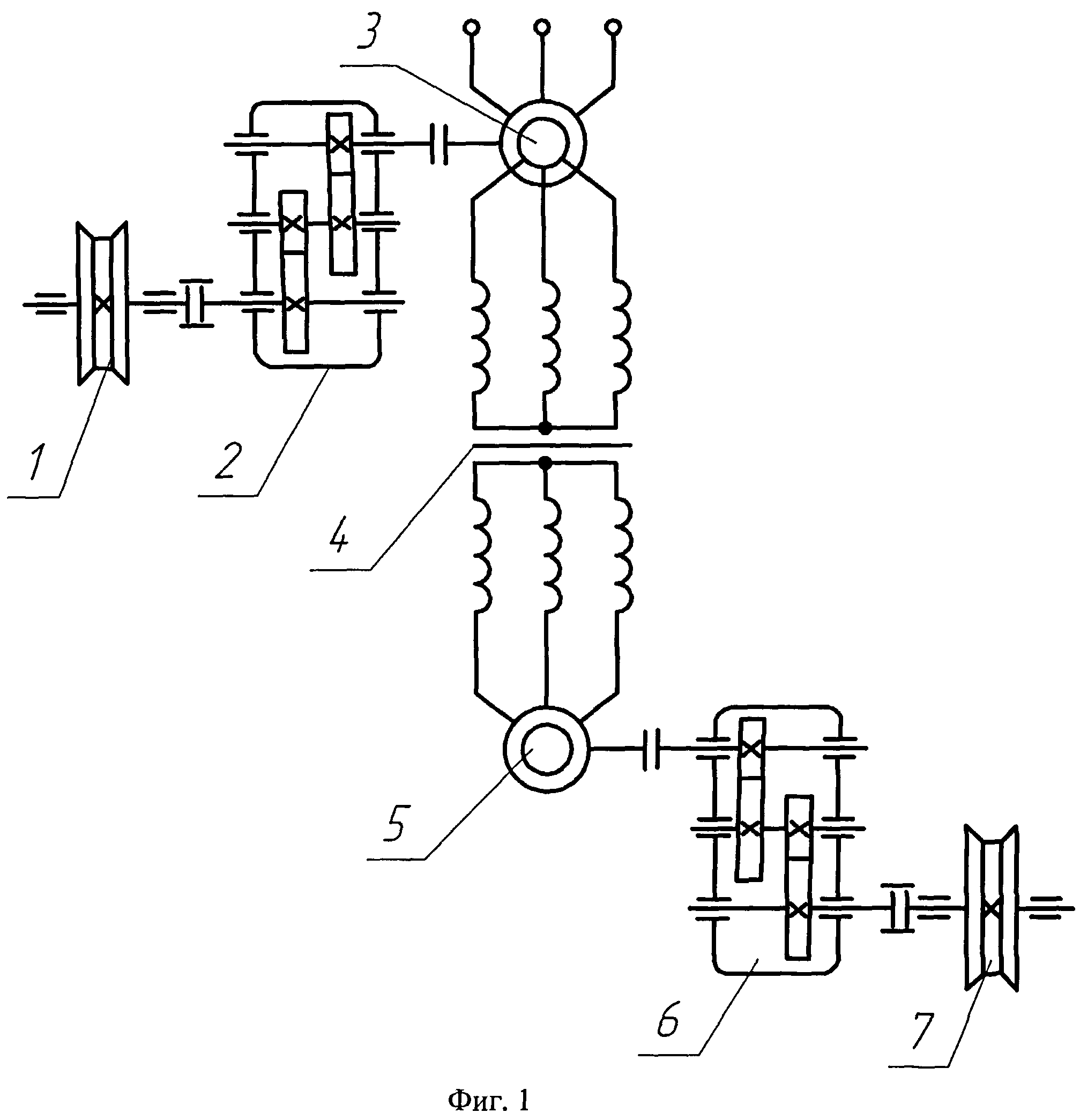
edrid.ru
Механизмы передвижения кранов - Энциклопедия по машиностроению XXL
Двигатели параллельного возбуждения постоянного тока и асинхронные электродвигатели переменного тока обладают жесткими естественными характеристиками (в рабочей их части), Скорость этих двигателей мало зависит от нагрузки. Такие характеристики целесообразны для насосов, вентиляторов, большинства станков, конвейеров, механизмов передвижения кранов и др. [c.127]Устройства, работающие на данном принципе, могут быть использованы не только в механизмах подъема для быстрого опускания груза, но и когда требуется ограничить скорость движения механизма. Так, для механизмов передвижения кранов, работающих на эстакадах, для перегрузочных мостов и их тележек желательно для уменьщения динамической нагрузки при подходе к концевым упорам, чтобы они автоматически снижали скорость движения до определенной величины, с которой и продолжали бы свое движение. Обычные схемы управления движением крана с торможением здесь не подходят, так как они затормаживают механизм, не обеспечивая дальнейшего движения с уменьшенной скоростью. В этом случае применяется тормозное устройство, выполненное по схеме фиг. 215, а, где двигатель механизма, соединенный со шкивом 2, служит одновременно и для управления тормозом. Поворачивающийся корпус двигателя соединен с рычагами 4 управления тормозом таким образом, что его крутящий момент при обоих направлениях движения воздействует на тормоз, размыкая его. Однако и в этом случае перед размыканием тормоза двигателю приходится преодолевать усилие предварительно сжатой пружины 3. Как и в механизме по фиг. 214, процесс регулирования скорости протекает в весьма узких пределах, [c.329]
Максимально допускаемая величина тормозного момента тормоза механизма передвижения крана (тележки), при котором обеспечивается заданный запас сцепления определяется по уравнению [c.381]В механизмах передвижения кранов мостового типа с раздельным приводом тормоз должен быть установлен на каждом приводе. [c.386]
К а 3 а к С. А. О допустимых величинах замедлений и тормозных моментов рельсовых механизмов передвижения кранов. — Вестник машиностроения , 1960, № 3. [c.666]
Под нагр узкой с умеренными ударами понимают нагрузку со значительными отклонениями от средней-величины, с редкими перегрузками (не более двукратной величины), вызванными пусками, остановками и реверсированием. Такая нагрузка характерна для механизма передвижения кранов и приводов смесителей и мешалок ншдкостей различной плотности, неравномерно нагруженных конвейеров и т. п. [c.502]
Многомоторный привод подвесных конвейеров многомоторный привод механизмов передвижения кранов с большими пролётами (при работе в закрытых помещениях) [c.842]
Многомоторный привод механизмов передвижения кранов и перегружателей с большими пролётами (при работе на открытых площадях и в помещениях) [c.842]
Контакторные контроллеры типа Т применяются для механизмов передвижения кранов и имеют симметричную схему включения двигателя для обоих направлений движения. Контакторные контроллеры типа ТС применяются для управления приводами механизмов подъёма, имеющими различную нагрузку при подъёме и опускании грузов, и схема их несимметрична при подъёме двигатель включается по нормальной схеме аналогично контроллеру Т на первых положениях спуска груза двигатель включается в сторону подъёма и работает в качестве электрического тормоза на последующих положениях спуска двигатель включается в сторону спуска и работает в режиме двигателя или генератора в зависимости от величины и направления грузового момента. [c.851]
Механизм передвижения крана на гусеничном ходу отдельно показан на фиг. 29. Главный распределительный вал гусеничного хода приводится во вращение от передаточной трансмиссии крана через пустотелую центрирующую цапфу и пару конических шестерен. На этом валу насажены две кулачковые муфты, включающие звёздочки цепного при- [c.913]
Ручной мостовой од но балочный кран состоит из моста, механизма передвижения крана и нормальной подвесной кошки. [c.923]Кран-балки нормального типа перемещаются по обычному подкрановому пути. Механизм передвижения кран-балок этого типа состоит из электродвигателя и вертикального редуктора, помещённых на площадке моста, из трансмиссионного вала, подвешенного к конструкции мостового настила, и четырёх ходовых колёс (двух приводных и двух неприводных). На вал редуктора насаживается шкив электромагнитного тормоза. [c.948]
Вид механической характеристики, которая определяет степень зависимости скорости от нагрузки (момента) на валу двигателя. Двигатели параллельного возбуждения постоянного тока и асинхронные электродвигатели переменного тока обладают жесткими естественными характеристиками. Их скорость мало зависит от нагрузки. Такая характеристика целесообразна для очень многих производственных механизмов насосов, вентиляторов, большинства станков, конвейеров, механизмов передвижения кранов и т. д. [c.431]
И широкий диапазон регулировки скоростей, автоматическое получение тяговых характеристик для механизмов передвижения крана, возможность получения малых посадочных скоростей, что особенно важно при монтажных работах, и осуществление электродинамического торможения. Для питания от внешней сети на кране предусмотрен кабельный барабан с электрическим кабелем длиной 50 м. [c.247]
Периодическое динамическое испытание стреловых кранов, имеющих силу или несколько грузовых характеристик, производится в положении, соответствующем наибольшей грузоподъемности крана. Механизм передвижения крана, снабженного дополнительными опорами, испытывается после окончания испытания крана на дополнительных опорах при этом величина испытательной нагрузки принимается для передвижения крана с минимальным вылетом стрелы. [c.592]
Механизм передвижения крана испытывается только в том случае, если кран рассчитан на передвижение с грузом. [c.592]
Ветровую нагрузку рабочего состояния учитывают при расчете металлоконструкций на прочность и выносливость, при проверке грузовой устойчивости крана против опрокидывания, а также при расчете механизмов крана. Ввиду непостоянства и нерегулярности ветрового воздействия при определении мощности двигателей крановых механизмов учитывают не более 60% от полной ветровой нагрузки рабочего состояния. Ветровую нагрузку нерабочего состояния учитывают при расчете на прочность металлоконструкций, механизмов передвижения крана и их противоугонных устройств, а также при расчете собственной устойчивости крана против опрокидывания. [c.186]Козловые краны оборудуют ограничителями перекоса для отключения привода механизма передвижения крана при забегании одной стороны крана относительно другой. [c.191]
Если нет специальных указаний, то для механизмов передвижения крана рекомендуется принимать Х = 30 м, а для тележек Ь = 2/3 пролета крана. [c.102]
Механизмы передвижения кранов. Ходовые колеса тележек, опоры механизмов поворота кранов, приводы подвесных конвейеров и каретки, приводы пластинчатых и скребковых конвейеров, механизмы передвижения вилочных погрузчиков и вагонеток........... 1,4 [c.107]
Гидропровод находит все большее применение в мостовых кранах. Так, на рис. 112, а показан механизм передвижения крана с высокомоментным гидродвигателем. Электродвигатель 1 приводит в движение аксиально-поршневой насос 2, от которого жидкость под давлением передается в гидродвигатель 4- За счет перепада давлений на входе и выходе гидродвигателя его ротор вращается и через вал 5 приводит во вращение ходовое колесо 6. Для предохранения механизма от перегрузки установлен предохранительный клапан 8. Ходовое колесо каждой концевой балки моста приводится во вращение своим отдельным механизмом. Для синхронизации движения при различных нагрузках на концевых балках установлены дроссели. [c.300]
В механизмах передвижения кранов и крановых тележек современных кранов все большее применение находят редукто- [c.365] В механизмах передвижения кранов мостового типа с раздельным приводом тормоз устанавливают на каждом приводе. Момент каждого тормоза для этих конструкций принимают равным 0,5 от общего тормозного момента, определенного по уравнению (52). [c.402]Крановая тележка перемещается по рельсам, уложенным на верхних поясах основных балок. Механизм передвижения крана и троллеи тележки располагают на консольных площадках, что обеспечивает легкий доступ к выкатным буксам ходовых колес, расположенных внутри концевых балок. [c.511]
Электродвигатель механизма передвижения крана [c.23]
I — механизм передвижения крана 2 — механизм подъема груза 3 — механизм передвижения тележки 4 — тележка 6 — стрела 6 — крюк. [c.264]
В механизме передвижения кранов, работающих на открытом воздухе, часто необходимо тормозить движущийся кран с относительно небольшой величиной тормозного момента, чтобы не вызвать пробуксовки ходовых колес по рельсам. А затем, когда кран остановится, необходимо, чтобы тормоз развивал значительно больший тормозной момент, способный удержать кран в неподвижном состоянии при действии ветровой нагрузки нерабочего состояния. Для этой цели фирма MAN (Nurnberg — ФРГ) [157] применяет двухступенчатые тормоза (фиг. 288). Эти тормоза при поршне толкателя /, находящемся в нижнем положении, замыкаются усилием веса замыкающего груза 2, расположенного на коленчатом рычаге 3, и усилием сжатой замыкающей пружины 4. Максимальный тормозной момент тормоза Мх равен [c.480]
Посадочный кран был запроектирован на основе унификации следуюш,их деталей, узлов и механизмов с колодезного крана был взят механизм вращения клеш,ей с напольно-завалочной машины — редуктор механизма передвижения машины с пратцен-крана — ходовые колеса механизма передвижения моста, зубчатые передачи и подшипники трансмиссионных валов. Достигнутая степень конструктивной преемственности деталей, узлов и механизмов посадочного крана может быть охарактеризована не только обычными коэффициентами конструктивной нормализации (см. главу IV), но также отношением веса унифицированных деталей, узлов и механизмов, входяш,их в посадочный кран, к общему весу этой машины. Так, в механизме передвижения тележки унифицированные элементы составляют по весу 70%, в механизме вращения кабины 20%, в механизме передвижения крана 80% и во вспомогательной тележке 87%. [c.154]
Для приближённого определения статической мощности электродвигателей механизмов передвижения крана можно принимать сопротивление движению а) при ходовых колёсах на подшипниках скольжения — 20 кг на 1 т веса крана б) при ходовых колёсах с цилиндрической поверхностью катания на подшипниках качения — 12 Kijm и в) при конических ходовых колёсах на подшипниках качения — 7 Kzjm. [c.949]
Iрансмис ионные валы механизмов передвижения кранов, соединяемые непосредственно с валами электродвигателей, необходимо проверять на критическое число оборотов по формуле [c.950]
Общий схематически вид крана К-255 показан на рис. 133. Кран состоит из трех основных частей стрелового хозяйства с системой канатов и полиспастов силовой установки и системы управления краном, смонтированных на поворотной раме крана, и нижней неповоротной опорной рамы с механизмами передвижения. Кран имеет индивидуальный дизель-электрическнй привод ис-нолиительных механизмов. Кинематическая схема привода пока- [c.223]
Механизм передвижения крана состоит из двух электродвигателей 20 и 22 типа ДК-309А мощностью по 43 кет при 1000 об мин. Электродвигатели соединены через муфты с ведущим валом коробки передач. Коробка передач представляет собой двухступенчатый редуктор.На выходном валу внутри редуктора установлены две шестерни, находящиеся в постоянном сцеплении с шестернями промежуточного вала. На выходном валу между шестернями крепится зубчатая муфта, которая включает одну из двух пар шестерен. С помощью муфты редуктор может обеспечивать передаточные числа 5,66 или 3,0. [c.249]
В течение 1963 и 1964 гг. Институт организации и механизации строительного производства Госплана УССР разработал и испытал противоугонное устройство, которое автоматически включает сигнализацию и рельсовые захваты кранов при ветре в 6 баллов и более и одновременно выключает механизмы передвижения крана. [c.711]
Максимальный тормозной момент механизма передвижения крана или тележки, если не заданы дополнительные требования к значению замедления, при практических расчетах можно определить по уравнению (52) при допускаемых значениях замедления а (см. табл, 37). Краны, работающие на открытом воздухе и перемещающиеся по рельсовым путям, кроме тормоза механизма передвижения имеют противоугонные устройства с ручным или мащинйым приводом, автоматического или принудительного действия, предотвращающие возможность движения крана под действием ветровой нагрузки нерабочего состояния. Мостовые краны, работающие на открытом воздухе, могут не иметь противоугонных устройств, если тормоз механизма передвижения обеспечивает удержание крана (без груза) в неподвижном состоянии при коэффициенте запаса кх = 1,2 при действии на кран ветровой нагрузки нерабочего состояния. В этом случае тормозной момент [c.401]
Проверка устойчивости козловых, полукозловых кранов и перегрузочных мостов правилами Госгортехнадзора не регламентирована. Однако и эти краны должны обладать достаточной устойчивостью, так как они обычно имеют большую подветренную площадь и высоко расположенные центр тяжести и точку приложения равнодействующей ветровой нагрузки. Поэтому динамические нагрузки при неустановившихся процессах работы механизма передвижения кранов в сочетании с ветровыми нагрузками могут создавать значительные опрокидывающие моменты. [c.480]
mash-xxl.info






423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)