 |
|
|||
|
|
|

звонок бесплатный
Наши сотрудники:
[email protected]
Екатерина - специалист по продаже а/м КАМАЗ
 [email protected]
[email protected]






Техника в наличии

Тягач КАМАЗ 44108-6030-24
2014г, 6х6, Евро3, дв.КАМАЗ 300 л.с., КПП ZF9, бак 210л+350л, МКБ,МОБ,рестайлинг.
цена 2 220 000 руб.,

КАМАЗ 4308-6063-28(R4)
4х2,дв. Cummins ISB6.7e4 245л.с. (Е-4),КПП ZF6S1000, V кузова=39,7куб.м., спальное место, бак 210л, шк-пет,МКБ, ТНВД BOSCH, система нейтрализ. ОГ(AdBlue), тент, каркас, рестайлинг, внутр. размеры платформы 6112х2470х730 мм
цена 1 950 000 руб.,

Самосвал КАМАЗ 6520-057
2014г, 6х4,Евро3, дв.КАМАЗ 320 л.с., КПП ZF16, ТНВД ЯЗДА, бак 350л, г/п 20 тонн, V кузова =20 куб.м.,МКБ,МОБ, со спальным местом.
цена 2 700 000 руб.,

Самосвал 6522-027
2014, 6х6, дв.КАМАЗ 740.51,320 л.с., КПП ZF16,бак 350л, г/п 19 тонн,V кузова 12куб.м.,МКБ,МОБ,задняя разгрузка,обогрев платформы.
цена 3 190 000 руб.,
СУПЕР ЦЕНА
на АВТОМОБИЛИ КАМАЗ
| 43118-010-10 (дв.740.30-260 л.с.) | 2 220 000 |
| 43118-6033-24 (дв.740.55-300 л.с.) | 2 300 000 |
| 65117-029 (дв.740.30-260 л.с.) | 2 200 000 |
| 65117-6010-62 (дв.740.62-280 л.с.) | 2 350 000 |
| 44108 (дв.740.30-260 л.с.) | 2 160 000 |
| 44108-6030-24 (дв.740.55,рест.) | 2 200 000 |
| 65116-010-62 (дв.740.62-280 л.с.) | 1 880 000 |
| 6460 (дв.740.50-360 л.с.) | 2 180 000 |
| 45143-011-15 (дв.740.13-260л.с) | 2 180 000 |
| 65115 (дв.740.62-280 л.с.,рест.) | 2 190 000 |
| 65115 (дв.740.62-280 л.с.,3-х стор) | 2 295 000 |
| 6520 (дв.740.51-320 л.с.) | 2 610 000 |
| 6520 (дв.740.51-320 л.с.,сп.место) | 2 700 000 |
| 6522-027 (дв.740.51-320 л.с.,6х6) | 3 190 000 |

подробнее про услугу перегона можно прочесть здесь.

|
Нужны самосвалы? Обратите внимание на Ford-65513-02. |
КАМАЗы в лизинг
ООО «Старт Импэкс» имеет возможность поставки грузовой автотехники КАМАЗ, а так же спецтехники на шасси КАМАЗ в лизинг. Продажа грузовой техники по лизинговым схемам имеет определенные выгоды для покупателя грузовика. Рассрочка платежа, а так же то обстоятельство, что грузовики до полной выплаты лизинговых платежей находятся на балансе лизингодателя, и соответственно покупатель автомобиля не платит налогов на имущество. Мы готовы предложить любые модели бортовых автомобилей, тягачей и самосвалов по самым выгодным лизинговым схемам.Контактная информация.
г. Набережные Челны, Промкомзона-2, Автодорога №3, база «Партнер плюс».
тел/факс (8552) 388373.
Схема проезда
Как происходит управление двигателем постоянного тока. Управление двигателем постоянного тока
Управление двигателем постоянного тока - схема и важные нюансы

Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление двигателем постоянного тока осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.

Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.

Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.

Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
 Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику. Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.

Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.

Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.

Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
proprovoda.ru
Управление двигателем постоянного тока | joyta.ru
Чтобы двигатель постоянного тока начал вращаться, ему необходимо обеспечить нужное количество энергии. Как правило, для маломощных двигателей достаточно несколько ватт. Блок управления (микроконтроллер), который принимает решения о запуске двигателя, не может непосредственно управлять двигателем, то есть обеспечить необходимую мощность со своего вывода. Это связано с тем, что порты микроконтроллера имеют очень ограниченную нагрузочную способность (максимальный ток на выходе микроконтроллера обычно не более 20 мА).
Поэтому нужен усилитель мощности - устройство, которое может на своем выходе генерировать сигнал мощностью большей, чем мощность на его входе. Такими устройствами являются транзистор и реле, которые прекрасно подходят для управления двигателем постоянного тока.
Управление двигателем при помощи биполярного транзистора
Самый простой способ приведения в действие двигателя показан ниже:

Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.
Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора.
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора - это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:

Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:

Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:

Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Управление двигателем при помощи реле
Если вам необходимо управление двигателем постоянного тока, и вы знаете, что частота переключения не будет слишком большая (ниже 20 Гц), то вы можете для коммутации использовать реле (реле не подходят для управления ШИМ). Преимуществом такого решения является, прежде всего, малое выделение тепла.
Существуют малогабаритные реле способные управлять токами до 10 А ! Для таких больших токов, потери мощности в реле являются приемлемыми, но для небольших токов хуже. Катушка управления контактами реле можно работать даже от нескольких сотен мА. Так что нет никакого смысла в использовании такого реле для управления током подобной величины. К счастью, есть отдельные экземпляры, которые потребляют ток около 40 мА и это уже гораздо лучше.
Если речь идет о напряжении управления реле, то оно бывает от 3 до 24 В. Как мы уже писали ранее, максимальный выходной ток микроконтроллера 20 мА, а это слишком мало, чтобы управлять реле напрямую. Поэтому для управления необходимо использовать транзистор. Схема такого подключения, как правило, выглядит следующим образом:

Так и так, нам нужен транзистор. Следует, отметить, что в данном случае выделяется гораздо меньше тепла, чем на схеме, основанной только на транзисторе, так как через транзисторный ключ в этой системе течет небольшой ток, а само реле почти не рассеивает энергию в выходной цепи.
Защитный диод на реле не является обязательным. Его наличие зависит от силы тока, индуктивности катушки и максимального напряжения Uкэ транзистора. А вот наличие диода в выходной цепи больше зависит от того, хотим ли мы продлить срок службы контактов реле.
В конце рассуждений о реле приведем ситуацию, когда данный вид управления двигателем является оптимальным. Предположим, что мы хотим управлять двигателем, у которого номинальное рабочее напряжение 2,5 В и ток 3А и работает он от источника напряжением 2,5 В (переключение с небольшой частотой). Если вы будете использовать усилитель, построенный на транзисторе, то на выходе мы будем иметь падение напряжения около 1 В, что в данном случае является слишком большим значением. При использовании же реле у нас никакого падения напряжения не будет.
Управление двигателем при помощи H-моста
Решения, которые мы привели до этого, имеют основной недостаток - с их помощью не возможно управлять двигателем в двух направлениях! Такая необходимость, скорее всего, нам пригодиться, например, при строительстве роботов. H-моста - это конструкция, которая может быть построена как из обоих типов транзисторов, как и с реле.

Буква «H» исходит из того, что четыре реле и двигатель в середине образуют на схеме букву «H».
Подробно о том, как работает H-мост можно почитать здесь
Управление шаговым двигателем
Шаговые двигатели, так же как и коллекторные, состоят в основном из катушек. То есть для вращения нужно пропустить ток через катушки. Таким образом, все из представленных схем управления двигателями могут быть использованы и для управления шаговым двигателем. (все, кроме H-моста)Разница в схеме усилителя мощности для шаговых двигателей заключается в том, что здесь немного другие напряжения и токи, и также в основном требуется 4 переключателя на один двигатель (когда двигатель имеет пять контактов).
Номинальное рабочее напряжение, в основном, находится в диапазоне 9 - 24 В. При таких не малых напряжениях мы имеем дело также с большим током: 0,3 - 1A на одну фазу! Ниже приведен пример подключения шагового двигателя с 5 выводами:

В роли ключей мы можем также использовать MOSFET - транзисторы. Это даже более простое решение.Так как нам нужно до 4-х транзисторов, которые занимают довольно много места на плате, хорошим решением будет использовать микросхему ULN2003A.
www.joyta.ru
Как управлять мотором постоянного тока
Как подключить мотор к МК
В данной статье мы будем разбираться как управлять с помощью МК скоростью и направлением вращения обычным двигателем постоянного тока.
Для того чтобы коллекторный мотор постоянного тока заработал, достаточно подать на него определённое напряжение. Полярность данного напряжения будет определять направление его вращения, а величина напряжения — скорость вращения. Напряжение нельзя менять безгранично. Каждый мотор рассчитан на определённый диапазон напряжений. Максимальной мощности он достигает на указанном в документации напряжении. Как правило, ниже 30-50% от этого напряжения он перестаёт вращаться. Чем больше нагрузка на мотор, тем больший ток он потребляет. Если же мотор не сможет прокрутить вал (его заклинило), то мотор по сути станет сопротивлением и потребляемый ток достигает максимальной величины, зависящей от внутреннего сопротивления его обмоток. Мотор не рассчитан на работу в таком режиме и может сгореть.
Для того чтобы вы поняли как меняется ток от нагрузки, посмотрим на реальный мотор R380-2580.
Мы видим, что рабочее напряжение данного мотора — 12В, потребляемый ток под нагрузкой — 1.5А. Ток останова мотора вырастает до 8А, а в холостом же вращении, потребляемый ток равен всего 0.8А.
Как мы знаем, порт микроконтроллера не может выдать ток больше 50мА, и напряжение питания 12В для него слишком большое. Для управления моторами нам понадобится электронный ключ — транзистор, возьмём обычный биполярный транзистор NPN и подключим его по следующей схеме.
Чтобы мотор начал вращаться, на базу транзистора необходимо подать небольшой ток, далее транзистор откроется и сможет пропустить через себя гораздо больший ток и напряжение — мотор будет вращаться. Стоит отметить что, если мы соберём такую схему, то транзистор очень скоро, если не сразу, выйдет из строя. Чтобы этого не произошло, его необходимо защитить.
Обмотки мотора обладают достаточно большой индуктивностью, а как известно индуктивность сопротивляется изменению тока. Поэтому, когда мы закроем транзистор, чтобы выключить мотор, то его сопротивление резко увеличится и он перестанет пропускать через себя ток. Однако индуктивность будет сопротивляться этому, и для того, чтобы удержать ток на прежнем уровне, по закону Ома, напряжение на коллекторе транзистора начнёт резко повышаться (может достигнуть даже 1000В, правда очень на малое время) и транзистор сгорит. Чтобы этого не произошло необходимо параллельно обмоткам мотора поставить диод, который откроет путь для обратного тока и замкнёт его на обмотке мотора, тем самым защитит транзистор. Также, все постоянные моторы имеют еще одну неприятность — их щётки искрят в процессе работы, создавая помехи, что может привести к сбою микроконтроллера. Чтобы снизить эти помехи, необходимо использовать конденсаторы небольшой ёмкости, подключенный параллельно выводам мотора (как можно ближе к самому мотору). Вот окончательная схема.
Биполярные транзисторы имеют один недостаток — в открытом состоянии они ведут себя как диоды (на них падает около 0.7 В). А это, в свою очередь, вызывает их большой нагрев на больших токах и снижаем КПД схемы управления мотором. Поэтому лучше управлять моторами с помощью полевых (MOSFET) транзисторов. В настоящее время они достаточно распространены и имеют невысокую цену. Их низкое сопротивление в открытом состоянии позволяет коммутировать очень высокие токи. Однако и у них есть свои недостатки. Так как MOSFET транзисторы управляются напряжением, а не током (и обычно оно составляет 10В), то нужно выбирать специальные логические MOSFET, которые могут управляться низким напряжением — 1.8 .. 2.5В или использовать специальные схемы драйверов полевых транзисторов. Как выбирать MOSFET под вашу схему мы рассмотрим в других статьях, на конкретных приборах.
Теперь, подавая на выход микроконтроллера логическую единицу, мы заставим мотор вращаться, а логический ноль — остановится. Однако вращаться он будет с постоянной скоростью и в только одну сторону. Хотелось бы иметь возможность менять направление вращения мотора, а также его скорость. Рассмотрим, как этого можно добиться с помощью микроконтроллера.
H-Мост — меняем направление вращения мотора
Для управления направлением вращения мотора существует специальная схема, которая называется H-мост (схема выглядит как буква H).
Работает схема очень просто. Если открыть верхний правый и левый нижний транзистор, то на клемах мотора справа будет плюс, а слева будет минус. Мотор будет крутиться в одну сторону. Если открыть левый верхний и правый нижний, то справа будет минус, а слева плюс — полярность тока сменится, и мотор будет крутиться в другую сторону. Паразитные диоды внутри MOSFET транзисторов будут защищать всю схему (параметры этих диодов не очень хорошие и в реальных схемах могут понадобиться более быстродействующие диоды Шотке параллельно паразитным диодам, для снижения нагрева полевого транзистора), так что лишние компоненты не понадобятся, кроме искрогасящего конденсатора.
В схеме H-моста в качестве нижних транзисторов всегда используются N-канальные, а вот верхние могут быть как N-канальные, так и P-канальные. P-канальными транзисторами в верхнем ключе проще управлять, достаточно сделать схему смещения уровня напряжения на затворе. Для этого можно использовать маломощный N-канальный полевой или биполярный транзистор. Нижним транзистором можно управлять напрямую от МК, если выбрать специальный логический полевой транзистор.
Если в вашей схеме будет использоваться высоковольтный мотор постоянного тока (больше 24В) или мощный мотор с токами более 10А, то лучше использовать специальные микросхемы — драйверы MOSFET транзисторов. Драйверы управляются, как правило, сигналами микроконтроллера от 2 до 5В, а на выходе создают напряжение необходимое для полного открытия MOSFET транзисторов — обычно это 10-15В. С помощью драйверов легко организовать управление верхним N-канальным транзистором. Очень хорошим драйвером является микросхема L6387D от компании ST. Данная микросхема хороша тем, что не требует диода для схемы накачки напряжения. Вот так она подключается для управления H-мостом на всех N-канальных транзисторах.
N-канальные полевые транзисторы, стоят дешевле P-канальных, а также имеют меньшее сопротивление в открытом состоянии, что позволяет коммутировать большие токи. Но ими сложнее управлять в верхнем положении. Проблема использования N-канального транзистора в верхнем ключе состоит в том, что для его открытия нужно подать напряжение 10В относительно Истока, а как вы видите на схеме там может быть все напряжение питания мотора, а не 0 вольт. Таким образом, на базу необходимо подать 10В + напряжение питания мотора. Нужна специальная bootstrap схема для повышения напряжения. Обычно, для этих целей используется схема накачки напряжения на конденсаторе и диоде. Однако такая схема работает только, если вы постоянно подзаряжаете конденсатор — открывая, закрывая нижний транзистор (в ШИМ управлении), или нужно еще усложнять схему — добавлять схему внешней подпитки конденсатора. Вот пример схемы управления N-канальными транзисторами без использования микросхем.
Рассмотрим теперь, как управлять скоростью вращения мотора.
ШИМ сигнал — управляем скоростью вращения мотора
Моторы постоянного тока имеют линейную зависимость скорости вращения от приложенного напряжения. Таким образом, чтобы снизить скорость вращения, надо подать меньше напряжения. Но надо помнить, что с падением напряжения, у мотора падает мощность. Поэтому, на практике, можно управлять скоростью мотора только в пределах 30%-50% от полной скорости вращения мотора. Для управления скоростью мотора без потери мощности, необходима обратная связь от мотора по оборотам вращения, например как в электрическом шуруповерте. Такой режим управления, требует более сложной схемы. Рассмотрим простой вариант — управление скоростью мотора без обратной связи.
Итак, нам необходимо менять напряжение подаваемое на мотор. В нашем распоряжении есть MOSFET транзистор. Мы помним, что наш мотор — это в первую очередь индуктивность. Индуктивность сопротивляется изменению тока. И если быстро включать и выключать напряжение на моторе, то в момент выключения ток будет продолжать течь благодаря индуктивности. А мотор будет продолжать вращаться по инерции, а не остановится. Но естественно, вращаться он будет медленнее, среднее напряжение на его обмотках будет меньшее.
Микроконтроллер, как раз, отлично умеет генерировать ШИМ (PWM) сигнал. А мотор умеет интегрировать данный сигнал (усреднять) за счёт индуктивности обмоток. От коэффициента заполнения (скважности) ШИМ сигнала как раз и будет зависеть полученное мотором среднее напряжение, а значит и скорость.
Какая же частота ШИМ нужна для лучшего управления мотором? Ответ очень простой, чем больше, тем лучше. Минимальная частота зависит от индуктивности мотора, а также массы ротора и нагрузки на вал мотора. Если смоделировать в электрическом симуляторе (например, PROTEUS) ШИМ управление мотором, то будет видно, что чем больше частота ШИМ, тем более ровный ток протекает через мотор (ripple current — снижается при увеличении частоты). Низкая частота:
высокая частота:
Если же частота упадёт ниже определённого уровня, то мотор не сможет крутится, ток станет разрывным (будет падать до нуля).
Отлично, все просто! Делаем частоту ШИМ побольше, например 1 МГц, и любому мотору хватит. В жизни же, все не так просто. Для понимания всех возможных проблем можно упрощенно принять затвор MOSFET транзистора за идеальный конденсатор. Для того чтобы транзистор полностью открылся, конденсатор необходимо зарядить до 10В (на самом деле меньше). Чем больше ток, который мы можем вкачать в конденсатор, тем быстрее он зарядится, а значит быстрее откроется транзистор. В процессе открытия транзистора, ток и напряжение на нем будут максимальными, и чем больше это время, тем сильнее нагреется транзистор. В datasheet обычно есть такой параметр как Qgate — полный заряд, который надо передать транзистору, чтобы он открылся полностью.
Чем меньше эта величина, тем меньшей ток нужен для управления данным транзистором. Естественно, такой ток нужен только на очень короткое время — какое, опять же написано в datasheet — tr, обычно оно измеряется в наносекундах. Чтобы выдать такой ток, нужны специальные драйверы, если же мы управляем логическим MOSFET напрямую от микроконтроллера, то мы не сможем обеспечить такой ток. Поэтому для защиты микроконтроллера необходимо перед базой MOSFET ставить резистор, а это сильно замедляет время открытия. В итоге, микроконтроллер в прямом управлении не может обеспечить более 1-2 мкc на открытие и закрытие транзистора. Время открытия и закрытия должно занимать не более 10% длительности ШИМ сигнала. Таким образом, мы сразу получаем ограничение в частоте — 50 000 Гц. Дополнительно, сам микроконтроллер должен иметь возможность генерировать ШИМ сигнал с возможностью хотя бы 8 битного управления шириной ШИМ (для этого требуется большая рабочая частота МК). В итоге, обеспечить большую частоту ШИМ не так просто. Так же, на высоких частотах, начитает мешать паразитные ёмкости и индуктивности. На плате, которую можно сделать дома, получить частоту ШИМ больше 300 кГц, очень сложно. Трассировка платы должна быть сделана идеально. Для снижения требований к плате, в настоящее время выпускаются специальные MOSFET, объединённые с драйверами управления, они позволяют на заводских, многослойных платах получить частоту управления MOSFET в 2МГц.
Индуктивность моторов не маленькая, и такие большие частоты не нужны. Для управления моторами постоянного тока вполне достаточно 8КГц, лучше около 20КГц (за звуковым диапазоном).
ШИМ управление мотором предполагает очень быстрое изменение напряжение от 0 для максимального, что порождает большие проблемы при трассировке платы. Перечислим коротко правила, которые необходимо соблюдать при трассировке платы.
-
Земли управления моторами и микроконтроллера обязательно должны быть разделены, соединение в одной точке тонким проводником, например 0.3мм, как можно ближе к проводам питания всей схемы
-
Драйвера управления MOSFET должны быть как можно ближе к самим MOSFET транзисторам
-
Исполнение управляющей области обязательно двухсторонее, желательно с земляным слоем с одной стороны. При импульсном управлении возникают электромагнитные помехи, чтобы снизить их, земляной слой должен быть рядом.
-
Обязательно наличие конденсатора как можно ближе к зоне прохождения больших импульсных токов. Если такого конденсатора не будет, то напряжение на линии питания будет сильно проседать и микроконтроллер будет постоянно сбрасываться. Также без такого конденсатора, за счёт индуктивности проводов питания, напряжения на линии питания может увеличиться в несколько раз и компоненты выйдут из строя!
Более подробно мы рассмотрим как работают эти правила на конкретных приборах.
ШИМ сигнал в H-мосте
Чтобы можно было менять направление вращения и скорость — нужна схема H-моста и нужно управлять транзисторами ШИМ сигналом. В схеме H-моста четыре транзистора, как лучше ими управлять, на какой транзистор подавать ШИМ сигнал. Разберёмся в этом вопросе (рекомендуем прочитать очень подробную статью на эту тему).
Рассмотрим нашу схему с точки зрения нагрева транзисторов. Это один из основных критериев, по которому наш прибор может выйти из строя. Полевой транзистор состоит из двух элементов — собственно транзистор и паразитный диод. В схеме управления мотором оба элемента работают. Нагрев полевого транзистора происходит в следующие моменты времени:
-
когда транзистор открыт, нагрев идёт из-за сопротивления в открытом состоянии Rdson, пропорционально времени открытия транзистора выделяется мощность P = I * I * Rdson
-
когда транзистор закрыт, то ток ЭДС мотора идет через диод, то есть нагрев идет из-за диода P = I * U diode forward (как правило 1В)
-
когда транзистор переключается из открытого состояния в закрытое, то нагрев пропорционален времени открытия и закрытия транзистора
Посмотрим, как влияет схема управления на нагрев нашим электронных ключей. Допустим, что мы управляем мотором ШИМ сигналом со скважностью 50% и мотор крутится в одну сторону.
Самый простой вариант — применить ШИМ сигнал к одному из двух транзисторов, а второй оставить все время открытым. Обычно, ШИМ в этом случае подаётся на нижний транзистор (N типа), который обычно быстрее. В этом случае нагрев нижнего будет больше верхнего на величину тепла выделяемого при переключениях транзистора. Чтобы сравнять счет, можно попеременно подавать ШИМ сигнал то на верхний (если они одинаковые), то на нижний транзистор. Также можно подавать ШИМ на оба транзистора одновременно, но из-за разницы в транзисторах это будет не эффективно, а также будет увеличивать нагрев за счет переключения транзисторов. При такой схеме управления, два других транзистора работают как диоды. К счастью, наибольший ток через диод будет при наибольшей скважности ШИМ, при этом диод будет задействован очень малое время.
Для исключения тока через диоды, которые дают существенный нагрев, можно мотор никогда не отключать от напряжения, а вместо этого, крутить его в обратную сторону. Таким образом, мы должны, например 70% ШИМ сигнала крутить вправо, а 30% влево. Это даст в итоге 70%-30%=40% скорости вправо. Но при этом не будут задействованы диоды. Такой метод управления называется комплементарным. Такая схема требует большого конденсатора на линии питания, а также источника питания, который может потреблять ток (например аккумулятора).
Вместо вращения мотора в разные стороны, можно помогать диодам — а именно тормозить мотор, открывать два верхних транзистора в момент низкого уровня ШИМ сигнала. На практике, все эти методы не дают существенного изменения скорости вращения двигателя, но позволяют эффективно управлять нагревом полевых транзисторов. Более подробно про особенности различных схем управления можно в этой статье.
myowndevice.ru
Самые простые схемы управления вращением двигателя постоянного тока

Электрика для начинающих
Начинающим радиолюбителям наверняка интересен вопрос изоляции транзистора (одного или группы) на радиаторе. Если рассматривать

Интересное
Для изготовления приспособления, которое позволит бесконтактно включать и выключать свет в комнате, потребуется не

Своими руками
Карманный автономный паяльник, работающий от одной литий ионной батарее, удобное решение, как говорится,

Мужик в доме
Содержание1 Двигаемся навстречу воде 2 Рециркуляция 3 Высокое давление в скважине 4 Тандем водокачек

Аккумуляторы и батареи
Всем привет, мы давно не делали индикаторы разряда автомобильного аккумулятора. Но в этой статье

Аккумуляторы и батареи
Содержание1 Вариант 12 Вариант 23 Вариант 34 Итог Многие самодельные блоки имеют такой недостаток,
volt-index.ru
Блок управления двигателем постоянного тока / Блог им. Sayron / Блоги по электронике
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя. В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования. Блок управления состоит из следующих узлов: — СИФУ (Система Импульсно — Фазового Управления) — Регулятор — Защита Принципиальная схема привода приведена ниже. Крупнее Рассмотрим схему поподробнее. Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0». Ниже представлены осциллограммы, поясняющие принцип работы.
Крупнее Рассмотрим схему поподробнее. Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0». Ниже представлены осциллограммы, поясняющие принцип работы. 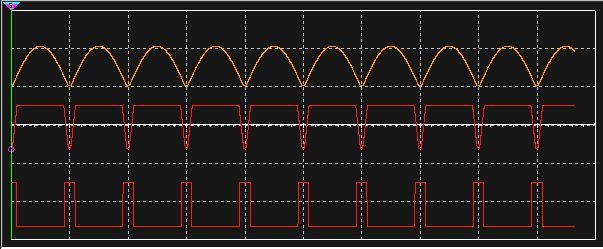 Сверху вниз: КТ1, КТ2, КТ3. Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел. Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2. Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5. Вот осциллограммы.
Сверху вниз: КТ1, КТ2, КТ3. Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел. Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2. Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5. Вот осциллограммы. 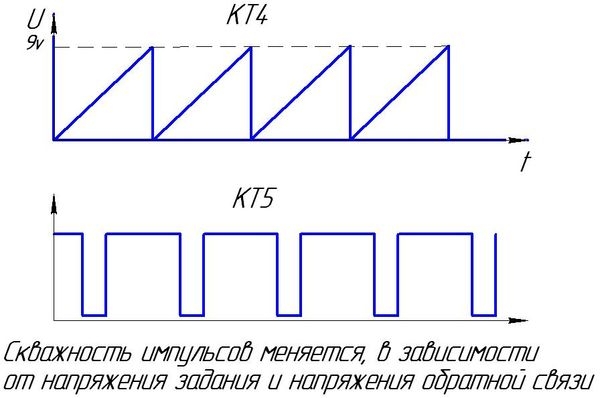 Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя. Теперь рассмотрим принцип работы регулятора оборотов. Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение. Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока. На этом графике представлена зависимость оборотов двигателя от напряжения задания.
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя. Теперь рассмотрим принцип работы регулятора оборотов. Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение. Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока. На этом графике представлена зависимость оборотов двигателя от напряжения задания.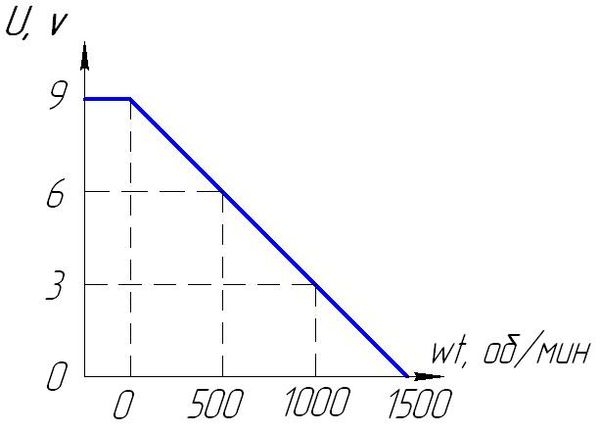 Значения оборотов двигателя даны для примера. Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос). При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3. Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя. Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.СХЕМА ЗАЩИТЫ Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его. Силовая часть блока управления. Схема силовой части представлена ниже
Значения оборотов двигателя даны для примера. Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос). При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3. Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя. Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.СХЕМА ЗАЩИТЫ Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его. Силовая часть блока управления. Схема силовой части представлена ниже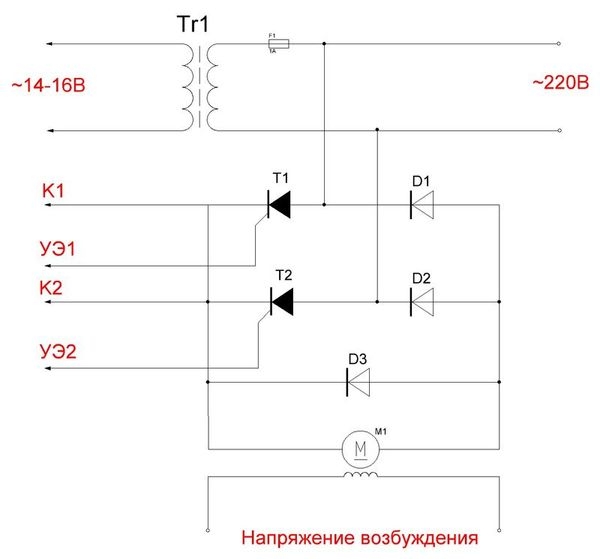 Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2 и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя. Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом: 1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2 и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя. Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом: 1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя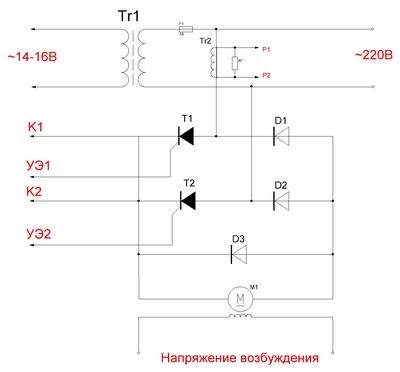 Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него. 2. Использовать датчик якорного напряжения. Схема приведена ниже.
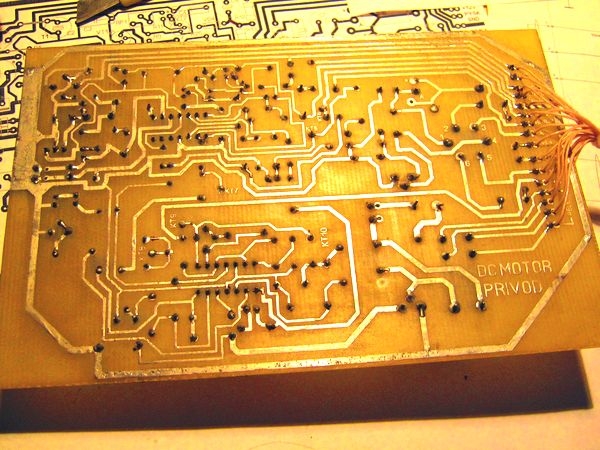
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него. 2. Использовать датчик якорного напряжения. Схема приведена ниже.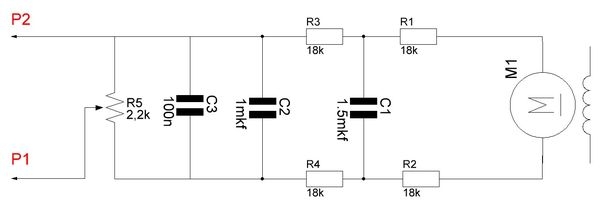 Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.Теперь перейдем к конструкции и наладке блока управления. Блок управления был выполнен на печатной плате (файл печатной платы)
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.Теперь перейдем к конструкции и наладке блока управления. Блок управления был выполнен на печатной плате (файл печатной платы)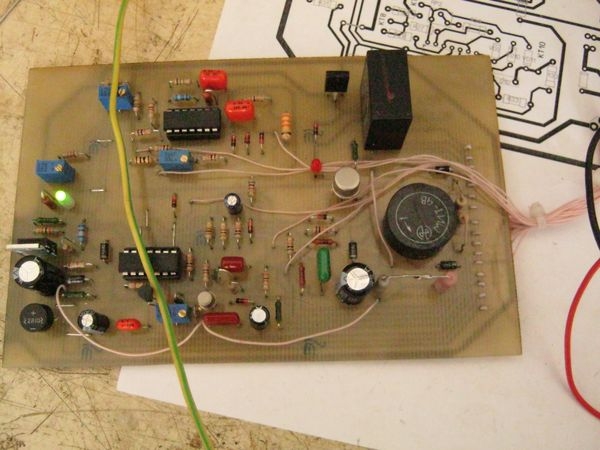
 Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.Настройка На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.Настройка На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.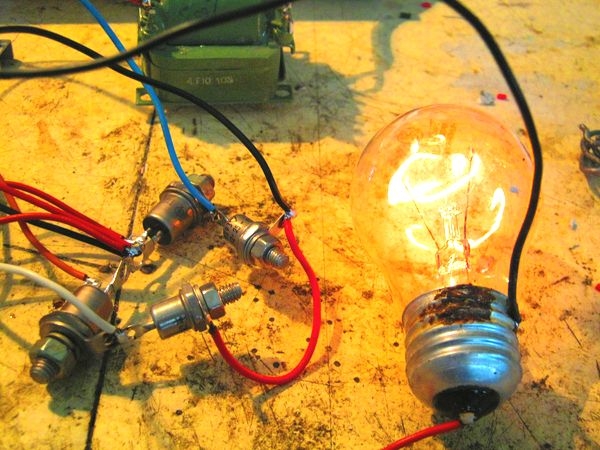 Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности. Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку. Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1 напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32. Если используется обратная связь по току якоря двигателя. Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности. Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку. Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1 напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32. Если используется обратная связь по току якоря двигателя. Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя. 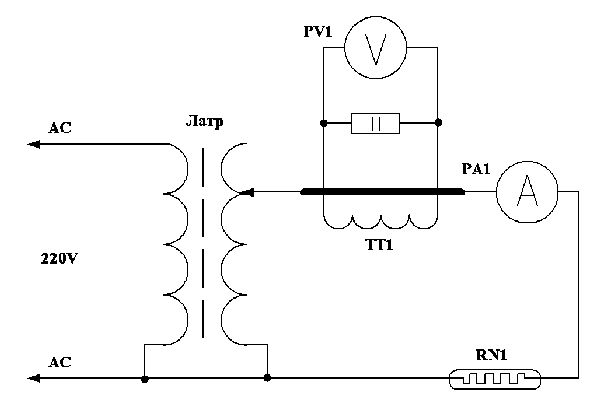 Внимание! Трансформатор тока без нагрузочного резистора не включать. Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты. Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
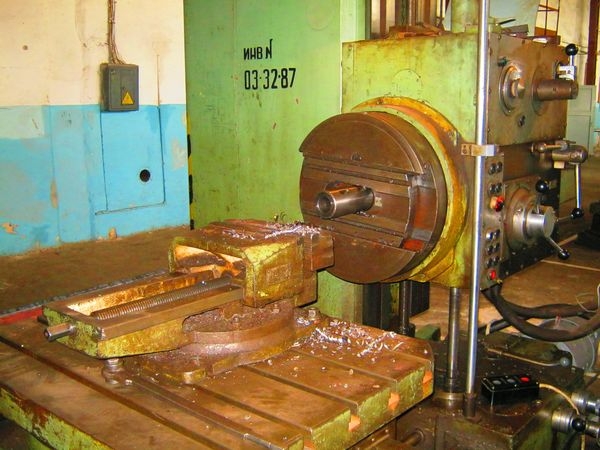
Внимание! Трансформатор тока без нагрузочного резистора не включать. Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты. Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.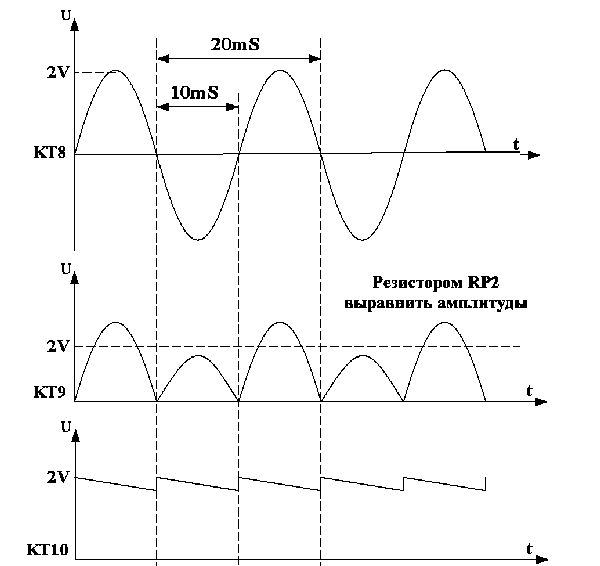 Дальнейшая настройка такая же как и в случае с использования тахогенератора.Если используется обратная связь по напряжению якоря двигателя. Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
Дальнейшая настройка такая же как и в случае с использования тахогенератора.Если используется обратная связь по напряжению якоря двигателя. Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
 На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола. Вот такой электромашинный усилитель.
На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола. Вот такой электромашинный усилитель. Заместо него и делался данный блок управления. Вот фото самого двигателя постоянного тока.
Заместо него и делался данный блок управления. Вот фото самого двигателя постоянного тока. Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
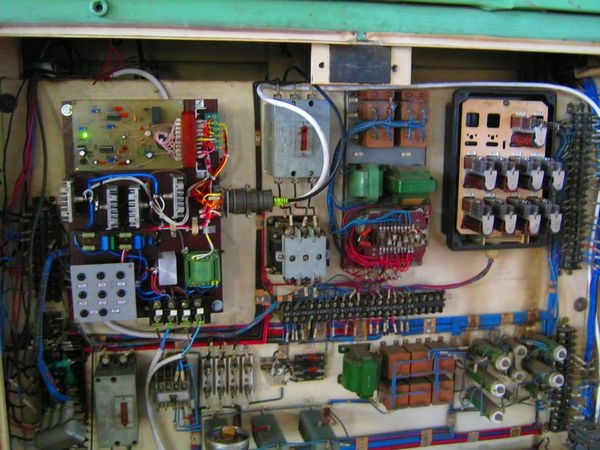
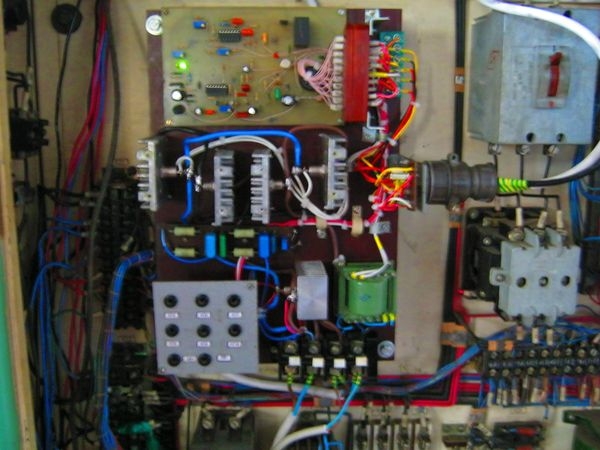
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.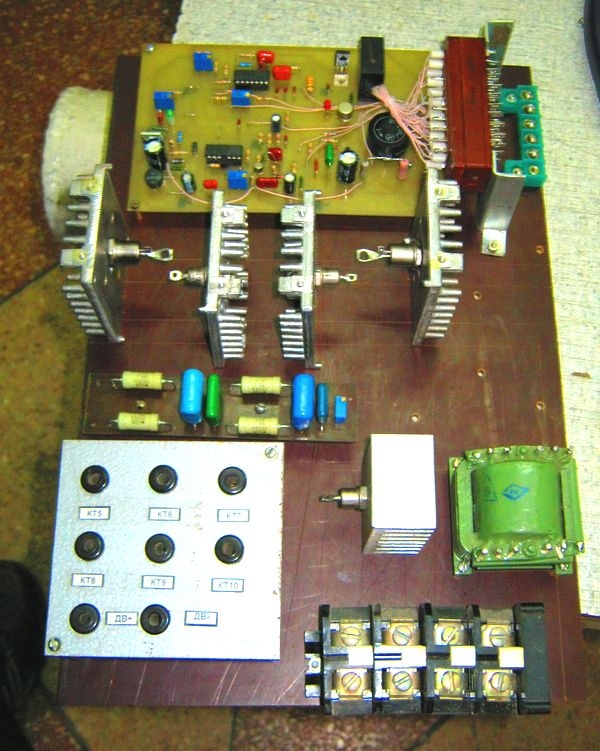 Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке. Вот смонтированный блок управления в силовом шкафу станка
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке. Вот смонтированный блок управления в силовом шкафу станка
 На другой стороне силового шкафа был установлен маленький пульт управления.
На другой стороне силового шкафа был установлен маленький пульт управления. На нем расположены: -тумблер включения блока -тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется. -ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали. Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось. Блок управления показал себя хорошо, сбоев и аварий не было.Схемы и перечень элементов
На нем расположены: -тумблер включения блока -тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется. -ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали. Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось. Блок управления показал себя хорошо, сбоев и аварий не было.Схемы и перечень элементов electronics-lab.ru
Управление возбуждением двигателей постоянного тока
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
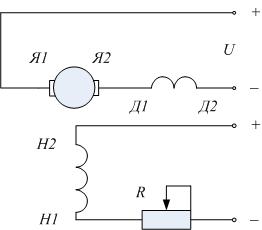 Рис.1 Схема независимого возбуждения
Рис.1 Схема независимого возбуждения
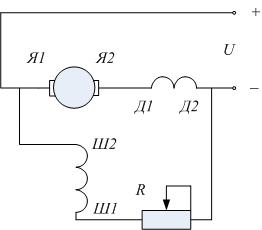 Рис.2 Схема параллельного возбуждения
Рис.2 Схема параллельного возбуждения
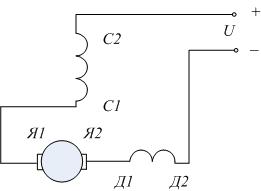 Рис.3 Схема последовательного возбуждения
Рис.3 Схема последовательного возбуждения
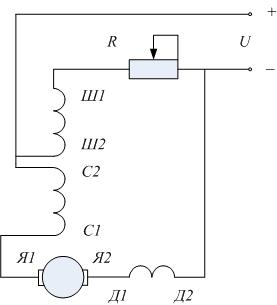 Рис.4 Схема смешанного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы. В общем случае скорость двигателя определяется выражением:

Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
- Изменением питающего напряжения U
- Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
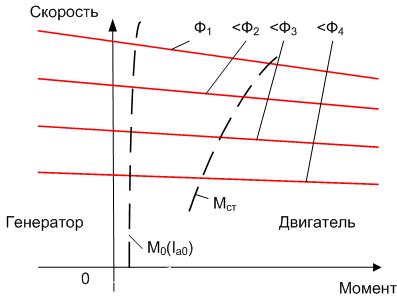
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения - многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения: Sprint-Electric PL, PLX - 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor - M25(R) - M210(R) - 8 А, остальные габариты с неуправляемым выпрямителем. Control Techniques Mentor MP - MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) - 8А MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) - 10A MP1200Ax(R), MP1850Ax(R) - 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине - это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом. Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
По всем возникшим вопросам обращайтесь пишите нам на [email protected], тел.(812) 635-9030
www.driveka.ru
Способы управления двигателями
Управление коллекторными электродвигателями постоянного тока
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки.

- где
 - угловая частота, рад/с,
- угловая частота, рад/с, - U - напряжение питания, В,
 – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад,- M - момент электродвигателя, Н∙м,
 - механическая жесткость двигателя.
- механическая жесткость двигателя.
Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания.
Управление универсальными двигателями
Универсальный коллекторный двигатель может быть подключен как к сети постоянного тока, так и к сети переменного тока. Так же как и у коллекторного двигателя постоянного тока, скорость универсального двигателя управляется величиной напряжения питания, а не его частотой.
Управление бесщеточными электродвигателями переменного тока
Электроприводы с электродвигателем переменного тока наиболее часто используются в составе: насосов, вентиляторов, компрессоров, станков и других механизмов, для которых важно поддерживать скорость вращения вала двигателя, либо определенный технологический параметр.
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод.
Преобразователь частоты позволяет управлять моментом и скоростью вращения электродвигателя и исполнительного механизма. Сервопривод позволяет точно управлять угловым положением, скоростью и ускорением исполнительного механизма.
При этом современные высокопроизводительные методы управления двигателями переменного тока используемые в современных частотных преобразователях и в сервоприводах имеют единую концепцию управления - векторное управление.
Скалярное управление
Скалярный метод управления обеспечивает постоянное отношение амплитуды напряжений обмоток статора к частоте. Такой метод позволяет контролировать скорость вращения электродвигателя в диапазоне до 1:10. Метод прост в реализации и подходит для большинства задач управления двигателем, где не требуется высокая динамика работы. Медленный отклик при переходном процессе связан с тем, что данный метод контролирует величину напряжения и частоты вместо управления фазой и величиной тока.
Векторное управление
Векторное управление позволяет управлять не только амплитудой и частотой, но и фазой управляющих напряжений. Таким образом данный метод обеспечивает максимальное быстродействие и регулирование во всем диапазоне скоростей, что невозможно выполнить с помощью скалярного управления. Недостатками данного метода является сложность реализации и более высокая цена, связанная с необходимостью использования более мощного микроконтроллера. Данный способ управления используется в таких задачах, как: робототехника, беспилотные аппараты, электрические транспортные средства, устройства автоматики и др.
engineering-solutions.ru








423800, Набережные Челны , база Партнер Плюс, тел. 8 800 100-58-94 (звонок бесплатный)