

Содержание
Как определить момент электродвигателя постоянного тока
Лошадиная сила – это математически полученное число, предназначенное для того, чтобы дать представление о том, сколько работы двигатель может произвести относительно лошади. Идея лошадиных сил довольно произвольна, и первоначально она была разработана Джеймсом Уаттом для продажи своего нового и улучшенного парового двигателя. В действительности средняя лошадь может производить около 15 лошадиных сил короткими очередями и около 5 лошадиных сил непрерывно. Одна лошадиная сила на самом деле ближе к выходу обезьяны среднего размера.
Расчет крутящего момента электродвигателя
Крутящий момент электродвигателя – это сила вращения его вала. Именно момент вращения определяет мощность Вашего двигателя. Измеряется в ньютонах на метр или в килограмм-силах на метр.
Виды крутящих моментов:
- Номинальный – значение момента при стандартном режиме работы и стандартной номинальной нагрузке на двигатель.

- Пусковой – это табличное значение. Сила вращения, которую в состоянии развивать электродвигатель при пуске. При подборе эл двигателя убедитесь, что данный параметр выше, чем статический момент Вашего оборудования — насоса, либо вентилятора и т.д. В противном случае электродвигатель не сможет запуститься, что чревато перегревом и перегоранием обмотки.
- Максимальный
– предельное значение, по достижении которого нагрузка уравновесит двигатель и остановит его.

Nascar или Formula1?
Сравнение двигателей Nascar и Formula1 это сравнение момента и мощности. Сравним наскаровский V8 и формульный V8 (с 2006 до 2013 года) двигатели. Оба атмосферные, бензиновые. Объем двигателей различается более чем в два раза — 5.8 литров у Nascar против 2.4 литров у Formula1. Крутящий момент: Nascar — 706 (@7500) Н•м, Formula1 — 290 (@17000) Н•м. Однако максимальная мощность различается не столь существенно: 825 (@9000) и 755 (@19250) л.с. соответственно.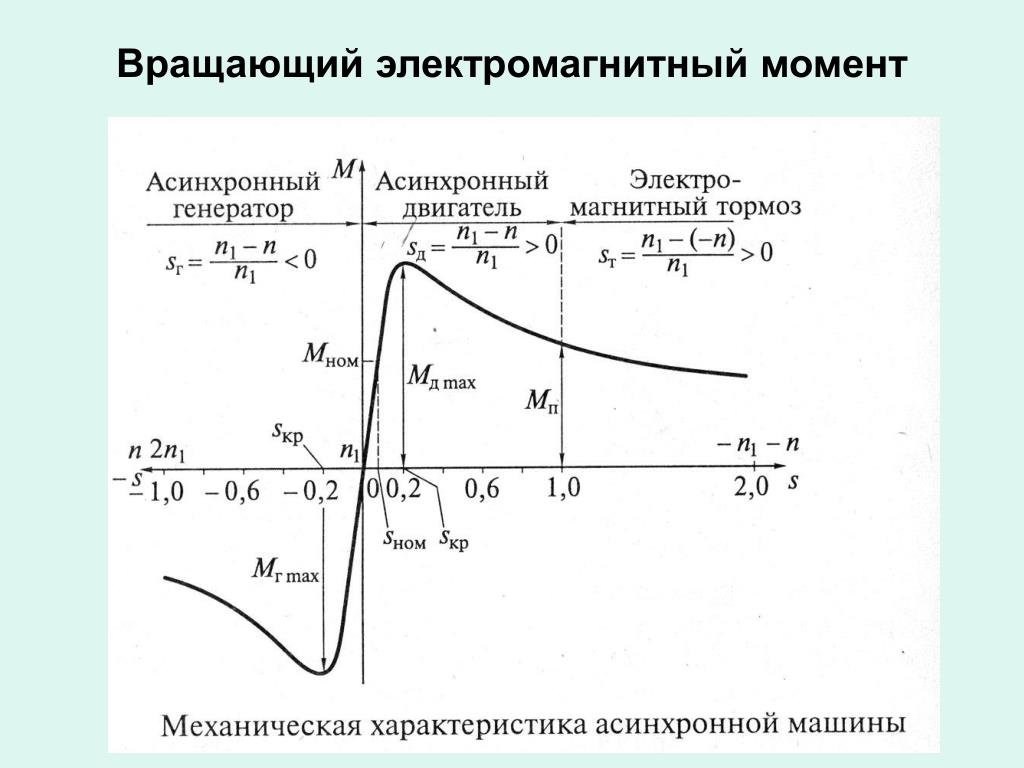 За счет чего же формульный двигатель при более чем в два раза меньшем объеме выжимает сравнимую мощность? За счет максимальных оборотов. Формульный двигатель очень оборотистый — рабочие обороты доходят до 20000 оборотов в минуту, что позволяет ему имея малый момент иметь сравнительно большую мощность.
За счет чего же формульный двигатель при более чем в два раза меньшем объеме выжимает сравнимую мощность? За счет максимальных оборотов. Формульный двигатель очень оборотистый — рабочие обороты доходят до 20000 оборотов в минуту, что позволяет ему имея малый момент иметь сравнительно большую мощность.
Таблица крутящих моментов электродвигателей
В данной таблице собраны крутящие моменты наиболее распространенных в Украине электродвигателей АИР, а также требуемый при пуске – пусковой, максимально допустимый для данного типа электродвигателя – максимальный крутящий момент и момент инерции двигателей АИР (усилие важное при подборе электромагнитного тормоза, например)
| Двигатель | кВт/об | Мном, Нм | Мпуск, Нм | Ммакс, Нм | Минн, Нм |
| АИР56А2 | 0,18/2730 | 0,630 | 1,385 | 1,385 | 1,133 |
| АИР56В2 | 0,25/2700 | 0,884 | 1,945 | 1,945 | 1,592 |
| АИР56А4 | 0,12/1350 | 0,849 | 1,868 | 1,868 | 1,528 |
| АИР56В4 | 0,18/1350 | 1,273 | 2,801 | 2,801 | 2,292 |
| АИР63А2 | 0,37/2730 | 1,294 | 2,848 | 2,848 | 2,330 |
| АИР63В2 | 0,55/2730 | 1,924 | 4,233 | 4,233 | 3,463 |
| АИР63А4 | 0,25/1320 | 1,809 | 3,979 | 3,979 | 3,256 |
| АИР63В4 | 0,37/1320 | 2,677 | 5,889 | 5,889 | 4,818 |
| АИР63А6 | 0,18/860 | 1,999 | 4,397 | 4,397 | 3,198 |
| АИР63В6 | 0,25/860 | 2,776 | 6,108 | 6,108 | 4,442 |
| АИР71А2 | 0,75/2820 | 2,540 | 6,604 | 6,858 | 4,064 |
| АИР71В2 | 1,1/2800 | 3,752 | 8,254 | 9,004 | 6,003 |
| АИР71А4 | 0,55/1360 | 3,862 | 8,883 | 9,269 | 6,952 |
| АИР71В4 | 0,75/1350 | 5,306 | 13,264 | 13,794 | 12,733 |
| АИР71А6 | 0,37/900 | 3,926 | 8,245 | 8,637 | 6,282 |
| АИР71В6 | 0,55/920 | 5,709 | 10,848 | 12,560 | 9,135 |
| АИР71В8 | 0,25/680 | 3,511 | 5,618 | 6,671 | 4,915 |
| АИР80А2 | 1,5/2880 | 4,974 | 10,943 | 12,932 | 8,953 |
| АИР80В2 | 2,2/2860 | 7,346 | 15,427 | 19,100 | 13,223 |
| АИР80А4 | 1,1/1420 | 7,398 | 16,275 | 17,755 | 12,576 |
| АИР80В4 | 1,5/1410 | 10,160 | 22,351 | 24,383 | 17,271 |
| АИР80А6 | 0,75/920 | 7,785 | 16,349 | 17,128 | 12,457 |
| АИР80В6 | 1,1/920 | 11,418 | 25,121 | 26,263 | 20,553 |
| АИР80А8 | 0,37/680 | 5,196 | 10,393 | 11,952 | 7,275 |
| АИР80В8 | 0,55/680 | 7,724 | 15,449 | 16,221 | 10,814 |
| АИР90L2 | 3/2860 | 10,017 | 23,040 | 26,045 | 17,030 |
| АИР90L4 | 2,2/1430 | 14,692 | 29,385 | 35,262 | 29,385 |
| АИР90L6 | 1,5/940 | 15,239 | 30,479 | 35,051 | 28,955 |
| АИР90LА8 | 0,75/700 | 10,232 | 15,348 | 20,464 | 15,348 |
| АИР90LВ8 | 1,1/710 | 14,796 | 22,194 | 32,551 | 22,194 |
| АИР100S2 | 4/2850 | 13,404 | 26,807 | 32,168 | 21,446 |
| АИР100L2 | 5,5/2850 | 18,430 | 38,703 | 44,232 | 29,488 |
| АИР100S4 | 3/1410 | 20,319 | 40,638 | 44,702 | 32,511 |
| АИР100L4 | 4/1410 | 27,092 | 56,894 | 65,021 | 43,348 |
| АИР100L6 | 2,2/940 | 22,351 | 42,467 | 49,172 | 35,762 |
| АИР100L8 | 1,5/710 | 20,176 | 32,282 | 40,352 | 30,264 |
| АИР112М2 | 7,5/2900 | 24,698 | 49,397 | 54,336 | 39,517 |
| АИР112М4 | 5,5/1430 | 36,731 | 73,462 | 91,827 | 58,769 |
| АИР112МА6 | 3/950 | 30,158 | 60,316 | 66,347 | 48,253 |
| АИР112МВ6 | 4/950 | 40,211 | 80,421 | 88,463 | 64,337 |
| АИР112МА8 | 2,2/700 | 30,014 | 54,026 | 66,031 | 42,020 |
| АИР112МВ8 | 3/700 | 40,929 | 73,671 | 90,043 | 57,300 |
| АИР132М2 | 11/2910 | 36,100 | 57,759 | 79,419 | 43,320 |
| АИР132S4 | 7,5/1440 | 49,740 | 99,479 | 124,349 | 79,583 |
| АИР132М4 | 11/1450 | 72,448 | 173,876 | 210,100 | 159,386 |
| АИР132S6 | 5,5/960 | 54,714 | 109,427 | 120,370 | 87,542 |
| АИР132М6 | 7,5/950 | 75,395 | 150,789 | 165,868 | 120,632 |
| АИР132S8 | 4/700 | 54,571 | 98,229 | 120,057 | 76,400 |
| АИР132М8 | 5,5/700 | 75,036 | 135,064 | 165,079 | 105,050 |
| АИР160S2 | 15/2940 | 48,724 | 97,449 | 155,918 | 2,046 |
| АИР160М2 | 18,5/2940 | 60,094 | 120,187 | 192,299 | 2,884 |
| АИР180S2 | 22/2940 | 71,463 | 150,071 | 250,119 | 4,288 |
| АИР180М2 | 30/2940 | 97,449 | 214,388 | 341,071 | 6,821 |
| АИР200М2 | 37/2950 | 119,780 | 275,493 | 383,295 | 16,769 |
| АИР200L2 | 45/2940 | 146,173 | 380,051 | 584,694 | 19,003 |
| АИР225М2 | 55/2955 | 177,750 | 408,824 | 710,998 | 35,550 |
| АИР250S2 | 75/2965 | 241,568 | 628,078 | 966,273 | 84,549 |
| АИР250М2 | 90/2960 | 290,372 | 784,003 | 1161,486 | 116,149 |
| АИР280S2 | 110/2960 | 354,899 | 887,247 | 1171,166 | 212,939 |
| АИР280М2 | 132/2964 | 425,304 | 1233,381 | 1488,563 | 297,713 |
| АИР315S2 | 160/2977 | 513,268 | 1231,844 | 1693,786 | 590,259 |
| АИР315М2 | 200/2978 | 641,370 | 1603,425 | 2116,521 | 962,055 |
| АИР355SMA2 | 250/2980 | 801,174 | 1281,879 | 2403,523 | 2163,171 |
| АИР160S4 | 15/1460 | 98,116 | 186,421 | 284,538 | 7,457 |
| АИР160М4 | 18,5/1460 | 121,010 | 229,920 | 350,930 | 11,375 |
| АИР180S4 | 22/1460 | 143,904 | 302,199 | 402,932 | 15,110 |
| АИР180М2 | 30/1460 | 196,233 | 470,959 | 588,699 | 27,276 |
| АИР200М4 | 37/1460 | 242,021 | 532,445 | 847,072 | 46,952 |
| АИР200L4 | 45/1460 | 294,349 | 647,568 | 941,918 | 66,229 |
| АИР225М4 | 55/1475 | 356,102 | 997,085 | 1317,576 | 145,289 |
| АИР250S4 | 75/1470 | 487,245 | 1218,112 | 1559,184 | 301,605 |
| АИР250М4 | 90/1470 | 584,694 | 1461,735 | 1871,020 | 467,755 |
| АИР280S4 | 110/1470 | 714,626 | 2072,415 | 2429,728 | 578,847 |
| АИР280М4 | 132/1485 | 848,889 | 1697,778 | 2886,222 | 1612,889 |
| АИР315S4 | 160/1487 | 1027,572 | 2568,931 | 3802,017 | 2363,416 |
| АИР315М4 | 200/1484 | 1287,062 | 3217,655 | 4247,305 | 3603,774 |
| АИР355SMA4 | 250/1488 | 1604,503 | 3690,356 | 4492,608 | 8985,215 |
| АИР355SMВ4 | 315/1488 | 2021,673 | 5054,183 | 5862,853 | 12534,375 |
| АИР355SMС4 | 355/1488 | 2278,394 | 5012,466 | 6151,663 | 15493,078 |
| АИР160S6 | 11/970 | 108,299 | 205,768 | 314,067 | 12,021 |
| АИР160М6 | 15/970 | 147,680 | 339,665 | 443,041 | 20,675 |
| АИР180М6 | 18,5/970 | 182,139 | 400,706 | 546,418 | 29,324 |
| АИР200М6 | 22/975 | 215,487 | 517,169 | 711,108 | 50,209 |
| АИР200L6 | 30/975 | 293,846 | 617,077 | 881,538 | 102,846 |
| АИР225М6 | 37/980 | 360,561 | 721,122 | 1081,684 | 186,050 |
| АИР250S6 | 45/986 | 435,852 | 784,533 | 1307,556 | 440,210 |
| АИР250М6 | 55/986 | 532,708 | 1012,145 | 1811,207 | 633,922 |
| АИР280S6 | 75/985 | 727,157 | 1454,315 | 2326,904 | 1090,736 |
| АИР280М6 | 90/985 | 872,589 | 1745,178 | 2792,284 | 1657,919 |
| АИР315S6 | 110/987 | 1064,336 | 1809,372 | 2873,708 | 4044,478 |
| АИР315М6 | 132/989 | 1274,621 | 2166,855 | 3696,400 | 5735,794 |
| АИР355МА6 | 160/993 | 1538,771 | 2923,666 | 3539,174 | 11848,540 |
| АИР355МВ6 | 200/993 | 1923,464 | 3654,582 | 4423,968 | 17118,832 |
| АИР355MLA6 | 250/993 | 2404,330 | 4568,228 | 5529,960 | 25485,901 |
| AИР355MLB6 | 315/992 | 3032,510 | 6065,020 | 7278,024 | 40029,133 |
| АИР160S8 | 7,5/730 | 98,116 | 156,986 | 235,479 | 13,246 |
| АИР160М8 | 11/730 | 1007,329 | 1712,459 | 2417,589 | 181,319 |
| АИР180М8 | 15/730 | 196,233 | 333,596 | 529,829 | 41,994 |
| АИР200М8 | 18,5/728 | 242,685 | 509,639 | 606,714 | 67,952 |
| АИР200L8 | 22/725 | 289,793 | 579,586 | 724,483 | 88,966 |
| АИР225М8 | 30/735 | 389,796 | 701,633 | 1052,449 | 214,388 |
| АИР250S8 | 37/738 | 478,794 | 861,829 | 1196,985 | 481,188 |
| АИР250М8 | 45/735 | 584,694 | 1052,449 | 1520,204 | 695,786 |
| АИР280S8 | 55/735 | 714,626 | 1357,789 | 2143,878 | 1071,939 |
| АИР280М8 | 75/735 | 974,490 | 1754,082 | 2728,571 | 1851,531 |
| АИР315S8 | 90/740 | 1161,486 | 1509,932 | 2671,419 | 4413,649 |
| АИР315М8 | 110/742 | 1415,768 | 2265,229 | 3964,151 | 6370,957 |
| АИР355SMA8 | 132/743 | 1696,635 | 2714,616 | 3902,261 | 12215,774 |
| AИР355SMB8 | 160/743 | 2056,528 | 3496,097 | 4935,666 | 18097,443 |
| AИР355MLA8 | 200/743 | 2570,659 | 4627,187 | 6940,781 | 26991,925 |
| AИР355MLB8 | 250/743 | 4498,654 | 7647,712 | 10796,770 | 58032,638 |
Расчет крутящего момента – формула
Примечание: при расчете стоит учесть коэффициент проскальзывания асинхронного двигателя. Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Расчет онлайн
Для расчета крутящего момента электродвигателя онлайн введите значение мощности ЭД и реальную угловую скорость (количество оборотов в минуту)
тут будет калькулятор
После расчета крутящего момента, посмотрите схемы подключения асинхронных электродвигателей звездой и треугольником на сайте «Слобожанского завода»
Источник
Основные параметры электродвигателя постоянного тока
- Постоянная момента
- Постоянная ЭДС
- Постоянная электродвигателя
- Жесткость механической характеристики
Постоянная момента
- где M — момент электродвигателя, Нм,
- – постоянная момента, Н∙м/А,
- I — сила тока, А
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
- где — электродвижущая сила, В,
- – постоянная ЭДС, В∙с/рад,
- — угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
- где — постоянная электродвигателя, Нм/√ Вт ,
- R — сопротивление обмоток, Ом,
- – максимальный момент, Нм,
- — мощность потребляемая при максимальном моменте, Вт
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника.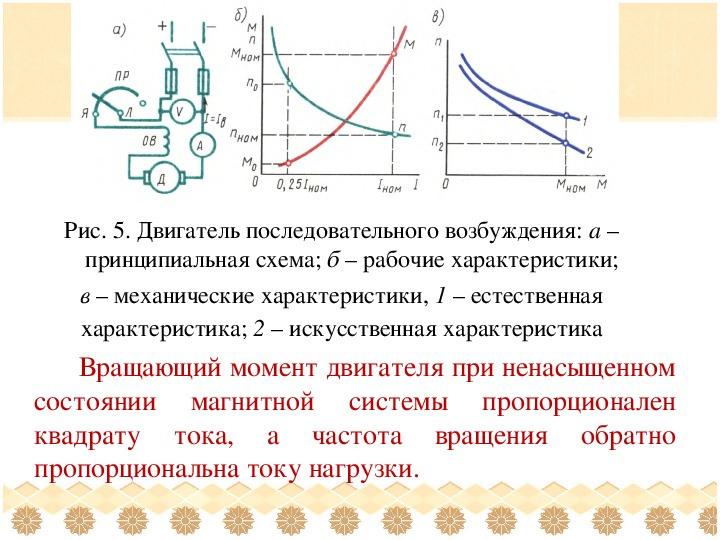 Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Жесткость механической характеристики двигателя
- где — жесткость механической характеристики электродвигателя постоянного тока
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
- где U — напряжение, В.
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:
Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:
- где I – сила тока, А
- U — напряжение, В,
- M — момент электродвигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — механическая мощность (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
- где — механическая постоянная времени, с
Источник
Максимальная мощность и максимальный момент
Что же означает максимальная мощность и когда она доступна. Все наверняка знают какую максимальную мощность, которую выдает их двигатель. И при сравнении разных авто количество кобыл под капотом является если не основным, то весьма существенным фактором. Возьмем, к примеру, бензиновый двухлитровый двигатель от Mazda Skyactiv. Мотор имеет мощность 155 л.с., правда на 6000 оборотах в минуту.
А как часто вы раскручиваете мотор до таких оборотов? Каков при этом будет расход топлива? Взяв «городской» диапазон оборотов 3-4 тыс. об/мин, с этого мотора можно снять мощность от 75 до 110 л.с., что в полтора раза ниже максимальной. Зато в этот диапазон оборотов входит максимум момента. Получается, что максимальный момент в городском цикле реализуется гораздо чаще, чем максимальная мощность. Последняя понадобится если мы решим участвовать в гонках, ну или хотя-бы выедем на автобан без скоростных ограничений.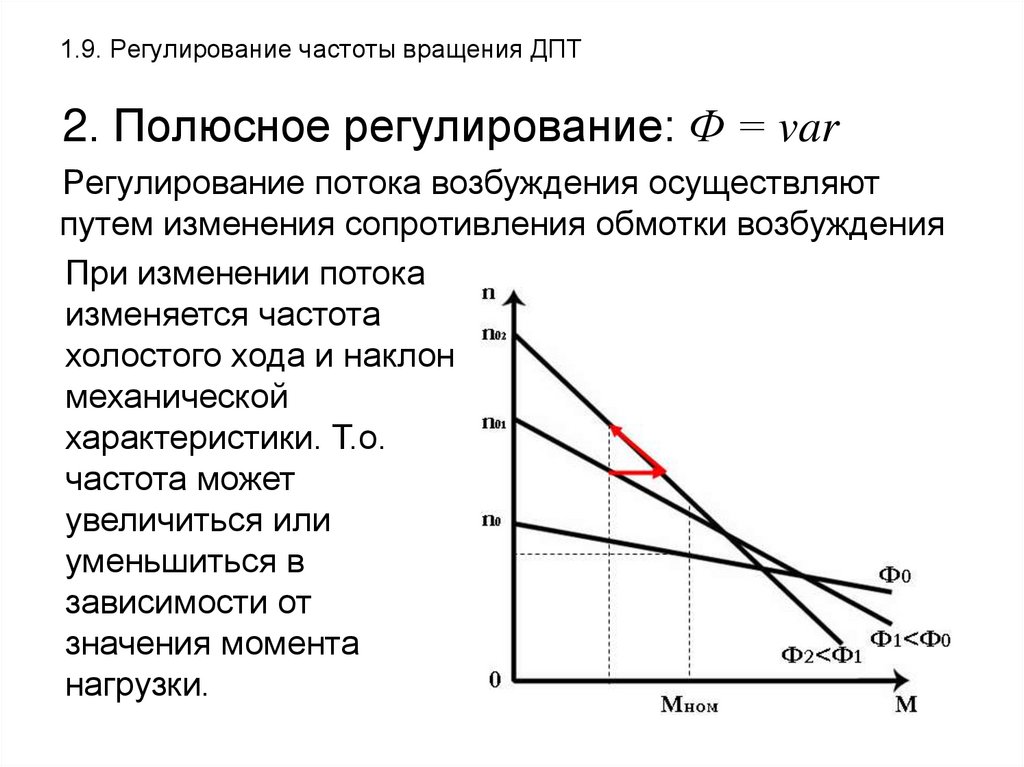 Кстати, красная зона у этого мотора начинается с 6500 об/мин и характеризуется падением мощности и значительным провалом в моменте. Не говоря о вреде таких оборотов для двигателя, можно однозначно сказать что езда на таких оборотах крайне неэффективна.
Кстати, красная зона у этого мотора начинается с 6500 об/мин и характеризуется падением мощности и значительным провалом в моменте. Не говоря о вреде таких оборотов для двигателя, можно однозначно сказать что езда на таких оборотах крайне неэффективна.
Основные уравнения двигателя постоянного тока (ДПТ)
В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Резюмируя
В итоге имеем, что мощность это производная от момента. Двигатель развивает момент, а мощность характеризует скорость вращения вала при выдаваемом моменте. Мощность показывает максимальную скорость, которую сможет развить автомобиль. Момент же показывает «тяговитость», т. е. характеризует способность двигателя «тянуть» автомобиль, и чтобы понять насколько быстро двигатель тянет машину, вводят понятие мощности.
е. характеризует способность двигателя «тянуть» автомобиль, и чтобы понять насколько быстро двигатель тянет машину, вводят понятие мощности.
Мощность и момент на колесах (часть 2)
Использованные материалы: Характеристики ДВС Renault K7M Сравнение Nascar и Formula 1 Mazda Skyactiv Двигатель Opel Z13DTH
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Вращающий момент электродвигателя
В двигателях постоянного тока вращающий момент определяется выражением М
≡ Ф
I
я, т. е. он пропорционален потоку и току якоря. В асинхронном двигателе момент создается вращающимся потоком Ф и током ротора
е. он пропорционален потоку и току якоря. В асинхронном двигателе момент создается вращающимся потоком Ф и током ротора
I
2. Он может быть выражен
Следовательно, момент пропорционален потоку и активной слагающей тока ротора I
2 cos Ψ2, так как только активная слагающая тока определяет мощность, а значит и момент.
На рис. 10-20 представлена схема включения короткозамкнутого двигателя. Если пустить двигатель, включив рубильник 1, то в первый момент пуска, когда п
2
=
0, a
s
= 1, наведенная в роторе
2
э. д. с.
Е
2 и пусковой ток
I
2п максимальны. Однако, пусковой момент
М
п не будет максимальным, а в 2—2,5 раза меньше максимального. Векторная диаграмма для цепи ротора (рис. 10-21), построенная подобно изображенной на рис. 9-9, показывает причину этого.
Рис 10-20.
Схема включения короткозамкнутого асинхронного двигателя.
Обычно в роторе х2
во много раз больше
r
2 и угол Ψ2, на который ток
I
2п отстает от э. д. с.
д. с.
Е
2 велик. Поэтому активная слагающая тока
I
2п cos Ψ2, а значит и пусковой момент
М
п малы. В современных асинхронных двигателях
М
п/
М
п = 1 — 1,5, хотя
I
2п/
I
н≈ 4,5—6,5.
Это же явление по другому объясняется на рис. 10-19 и 10-22.
Рис. 10-21.
Векторная диаграмма в цепи ротора.
При описании принципа работы двигателя (рис. 10-19) было предположено, что ток I
2 совпадает по фазе с э. д. с.
Е
2, т. е. что он активный ( Ψ2 = 0). На рис. 10-22 представлен момент пуска, когда направление э. д. с. в проводах ротора соответствует обозначенному на рис. 10-19, а ток показан отстающим от э. д. с. на угол Ψ2. Тогда шесть проводов ротора (три под полюсом
N
и три под полюсом
S
) создают усилия, действующие в направлении вращения потока, а два провода вызывают противодействующие усилия. В результате этого вращающий момент будет тем меньше, чем больше сдвиг фаз между током
I
2 и э. д. с.
д. с.
E
2.
Рис. 10-22.
Ток в роторе двигателя в момент пуска.
По мере увеличения скорости вращения ротора реактивное сопротивление обмотки ротора x
2
s = x
2
s
уменьшается, а вместе с этим уменьшается угол Ψ2, так как сопротивление
r2
≈ const. Наступает такое положение (рис 10-21), когда при некотором скольжении
s
м ≈ 0,1—0,15 реактивное сопротивление
x
2
s
становится равным активному
r
2, угол Ψ — 45° и э. д. с.
E
2
s
уравновешивает два равных падения напряжения
I
2
r
2 и
I
2
x
2
s
.В это время активная слагающая тока
I
2 cos Ψ2 и вращающий момент
М
м становятся максимальными, несмотря на некоторое уменьшение тока
I
2.
Обычно М
м/
М
м = 1,8—2,5 и называется способностью к перегрузкe.
При дальнейшем разгоне ротора x2s становится значительно меньшим, чем r
2, им можно пренебречь и считать ток ротора активным (
I
2 ≈
I
2 cos Ψ 2). Так как
E
2
s= E
2
s
тоже продолжает уменьшаться, то вместе с током
I
2 уменьшается и вращающий момент.
Максимальная скоростьn
вращения будет при холостом ходе двигателя и тогда
n
2 ≈
n
1 , a s ≈ 0. Зависимость вращающего момента от скольжения
М =f
(
s
) представлена на рис. 10-23.
Рис. 10-23.
Зависимость вращающего момента двигателя от скольжения.
Нормальная работа двигателя возможна только на участке кривой при скольжениях s
от нуля до sм, так как в этом случае при увеличении тормозного момента и значит
s
вращающий момент возрастает. На участке от
s
=
s
м до
s
= 1 работа двигателя неустойчива. Номинальный момент Мн соответствует обычно номинальному скольжению
Номинальный момент Мн соответствует обычно номинальному скольжению
s
н = 1—6%.
Поток Ф пропорционален напряжению U
1, подводимому к трансформатору. Сказанное остается в силе и для асинхронного двигателя. Так как
М
≡ Ф
I
2 cos Ψ 2, то можно написать, что
Отсюда можно сделать очень важный для асинхронных двигателей вывод
т. е. вращающий момент пропорционален квадрату подведенного к статору напряжения. Таким образом, падение напряжения в сети, например до 0,9 U
1н, вызовет уменьшение момента до 0,9 • 0,9
М
н
=
0,81
М
н и нагруженный двига тель может остановиться. Указанным обстоятельством и объясняется, частично, нормирование падения напряжения в распределительных сетях, питающих асинхронные двигатели.
В практике потребителя часто интересует механическая характеристика двигателя
п
2
= f
(
М
) при
U
1
=
const и
f
1 = const. Для удобства пользования по осям откладывают (
Для удобства пользования по осям откладывают (
n
2/
n
1)100% и (
М
/
М
н)100%.
Рис. 10-24.
Механическая характеристика двигателя.
Эта характеристика получается простым перестроением рис, 10-23 и показана на рис. 10-24, где рабочая часть обозначена сплошной линией. Кривая 1 для двига телей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости, подобно двигателю постоянного тока параллельного возбуждения. Асинхронный двигатель с фазным ротором для регулирования скорости вращения, например для крановых и подъемных устройств, имеет более мягкую характеристику (кривая 2).
Бензин или Дизель?
Бензин, как известно, имеет большую температуру горения и выделяет при этом больше энергии. Кроме того, дизельный двигатель имеет более ограниченный диапазон оборотов, стало быть большой мощности с дизеля не снять. Поэтому дизель оптимизирован под момент (длинные шатуны и большой ход поршня). А чтобы он хоть как-то ехал на него обычно устанавливают турбину, ведь дизель не имеет проблем с детонацией при увеличении степени сжатия. Приведу в пример характеристики двигателя Opel Z13DTH (Astra-H, Corsa-D) — это турбо-дизель с объемом 1.3 литра.
А чтобы он хоть как-то ехал на него обычно устанавливают турбину, ведь дизель не имеет проблем с детонацией при увеличении степени сжатия. Приведу в пример характеристики двигателя Opel Z13DTH (Astra-H, Corsa-D) — это турбо-дизель с объемом 1.3 литра.
Двигатель имеет довольно малую мощность в 90 л.с. (на 4000 об/мин), но зато момент в 200 Нм. Тут будет уверенный подхват с низов, но малая максимальная скорость автомобиля (172 км/ч для Astra при 1250 кг массы). Малая мощность характеризуется резким падением момента на максимальных оборотах и, собственно, невысокими максимальными оборотами.
Вращающий момент | Электротехника
Электромагнитный момент.
Электромагнитный момент Мэм возникает под влиянием сил, действующих на проводники ротора, которые находятся во вращающемся магнитном поле. Обозначим мгновенное значение тока ротора через i2s(рис. 3.16), магнитную индукцию в этой же точке через В и длину проводника через l ( длина пакета ротора). Тогда сила, действующая на проводник, f = В l i2s
3.16), магнитную индукцию в этой же точке через В и длину проводника через l ( длина пакета ротора). Тогда сила, действующая на проводник, f = В l i2s
Индукция В и ток ротора i2s в каждый данный момент времени распределены вдоль окружности ротора примерно по синусоидальному закону, т. е.
— координата, определяющая положение проводника на роторе (рис. 3.16), а ψ2 — угол сдвига фаз между ЭДС e2s (согласно п. 3.4.1 ЭДС e2s совпадает по фазе с индукцией В) и током ротора i2s.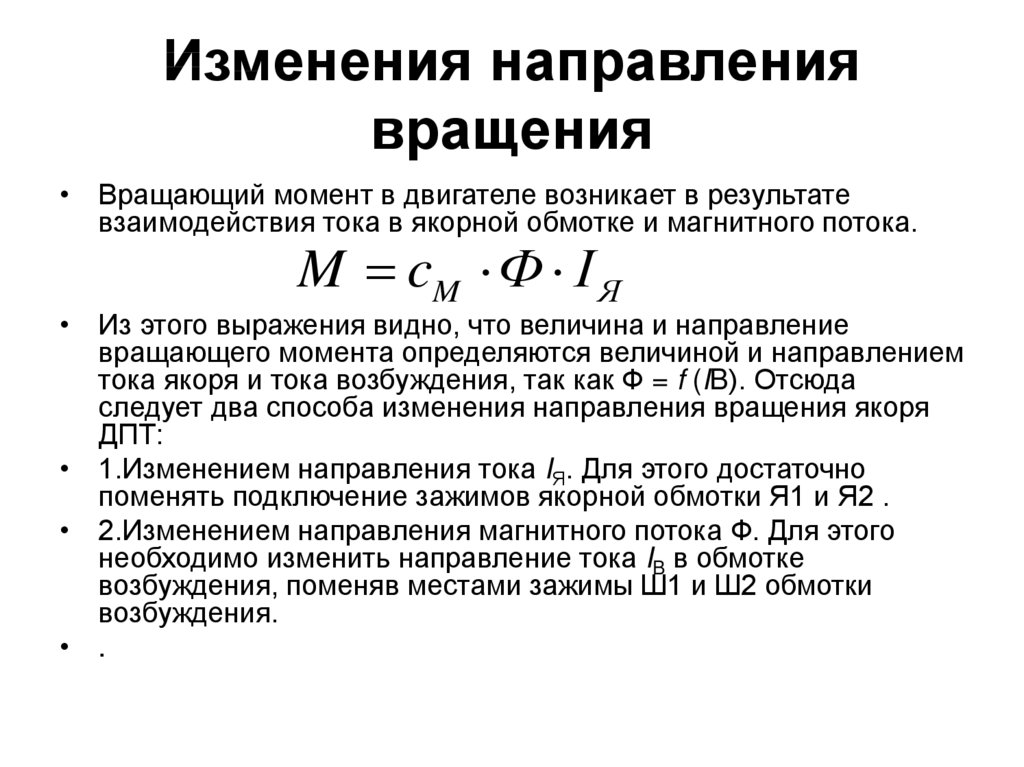 Таким образом,
Таким образом,
Средняя сила, действующая на проводник, определяется как интеграл вдоль окружности ротора от силы f, действующей на один проводник:
Заменяя произведение синусов на разность косинусов, получаем:
Интеграл от второго слагаемого, как интеграл за два периода косинусоидальной функции, равен нулю. Тогда
Обозначим число проводников ротора через N2 . Сила, действующая на все проводники, будет F = N2fср. Вращающий момент есть произведение силы F на радиус ротора, т. е. M = FD/2. Зная, что полюсное деление и для синусоиды , находим момент:
Обозначим постоянную
Тогда
(3. 20) В этом выражении , где R2 — активное сопротивление, а X2s— индуктивное сопротивление фазы вращающегося ротора. Формула (3.20) показывает, что вращающий момент двигателя создается за счет взаимодействия магнитного потока и тока в обмотке ротора.
20) В этом выражении , где R2 — активное сопротивление, а X2s— индуктивное сопротивление фазы вращающегося ротора. Формула (3.20) показывает, что вращающий момент двигателя создается за счет взаимодействия магнитного потока и тока в обмотке ротора.
Влияние скольжения s и напряжения на фазе статора на вращающий момент двигателя. В (3.20) значение тока определяется из выражения где E2s и I2s— ЭДС и ток фазы вращающегося ротора;
Подставляя значения I2s и cos Ψ2 в (3.20), получаем:
(3. 21)
21)
Если учесть, что
,
то (3.21) можно переписать:
Постоянная
,
где w2 — число витков ротора; на одну фазу статора (число фаз равно трем).
Подставляя значения в (3.22), находим:
Используя приведенные значения активного и индуктивного сопротивлений фазы ротора, получаем:
Если пренебречь падением напряжения в обмотке статора, формула принимает вид
(3.22а)
Погрешность в определении момента при применении формулы (3.22а) не превышает 5 %,что вполне допустимо для инженерных задач. Из (3.22а) видно, что вращающий момент пропорционален квадрату напряжения фазы статора. Изменение U1существенно сказывается на моменте. Так, если U1падает на 10 %, то момент падает на 19 %.
Формула (3.22а) может быть выведена также из формулы механической мощности двигателя:
где m— число фаз двигателя. Так как , где — угловая скорость вращающегося поля, то
Так как , где — угловая скорость вращающегося поля, то
где ω1 — угловая частота тока в сети.
Учитывая формулу (3.19) и обозначая X1 + X`2, получаем:
. (3.23)
3.11.3. Характеристика момент-скольжение.
Характеристика момент-скольжение M(s), построенная по (3.23) изображена на рис. 3.17. Точка s= 0, М = 0 соответствует идеальному холостому ходу двигателя, а точка Мном, sном — номинальному режиму. Участок ОН графика — рабочий участок. На этом участке зависимость M(s) практически линейная. Действительно скольжение на этом участке s= 0 + 0,08, поэтому и в формуле (3.23) значением (Хк)2 можно пренебречь. Тогда (3.23) принимает вид где — величина для данного двигателя постоянная.
Участок ОН графика — рабочий участок. На этом участке зависимость M(s) практически линейная. Действительно скольжение на этом участке s= 0 + 0,08, поэтому и в формуле (3.23) значением (Хк)2 можно пренебречь. Тогда (3.23) принимает вид где — величина для данного двигателя постоянная.
Участок НК, графика соответствует механической перегрузке двигателя. В точке К вращающий момент достигает максимального значения и называется критическим моментом. Скольжение sк, соответствующее критическому моменту, называется критическим скольжением.
Участок ОК характеристики — участок статически устойчивой работы двигателя (под устойчивой работой понимается свойство двигателя автоматически компенсировать малые отклонения в режиме работы за счет собственных характеристик). Пусть, например, в установившемся режиме (Мвр=М) по какой-либо причине момент сопротивления увеличится и станет равным М’>М. Тогда последует переходный процесс: частота вращения ротора п уменьшится, скольжение s увеличится, Мвр согласно характеристике M(s) возрастет и двигатель выйдет на новый установившийся режим, характеризующийся пониженной частотой вращения n‘ и равенством моментов М’вр = М’.
Пусть, например, в установившемся режиме (Мвр=М) по какой-либо причине момент сопротивления увеличится и станет равным М’>М. Тогда последует переходный процесс: частота вращения ротора п уменьшится, скольжение s увеличится, Мвр согласно характеристике M(s) возрастет и двигатель выйдет на новый установившийся режим, характеризующийся пониженной частотой вращения n‘ и равенством моментов М’вр = М’.
Статически устойчивый участок характеризуется положительной производной dM/ds>0. Значение критического момента Мк может быть найдено из условия dM/ds
. (3.24)
(3.24)
Приравнивая (3.24) нулю, получаем значение критического скольжения
(3.25)
Подставив sкв (3.23), получим
(3.26)
Отношение Мк/Мном=kм называется кратностью максимального момента. У серийных двигателейkм=1,7/3,4. .
Участок КП — участок неустойчивой работы. Если по какой-либо причине Мсстанет больше Мвр , то анализ, аналогичный анализу для устойчивого участка, показывает, что Мвр не увеличится, а, наоборот, уменьшится, что приведет к увеличению скольжения и еще большему уменьшению вращающего момента – практически ротор двигателя мгновенно остановится (рис. 3.17, точка П). Участок неустойчивой работы характеризуется отрицательной производной: dM/ds<0.
3.17, точка П). Участок неустойчивой работы характеризуется отрицательной производной: dM/ds<0.
В точке П скольжение sп=1 (n=0).
На участке ПТ скольжение s>1 . Это возможно, когда направление вращения ротора противоположно направлению вращения поля. Действительно, в этом случае s= n1 — (-n)/n1 > 1. Значение скольжения s > 1 характеризует тормозной режим двигателя, подробно рассмотренный в § 3. 16.
16.
Выражение момента в о. е.(формула Клосса) Для вывода формулы момента в относительных единицах воспользуемся выражением (3.25), т. е. в (3.23) вместо 3PU12 подставим его значение 2ω1XkMk и учтем, что R‘2 = skXk . В результате преобразования получим формулу Клосса:
. (3.27)
Электрические машины постоянного тока (страница 3)
8. Электрическая машина задачи 3 была использована в качестве электродвигателя, причем при вращающем моменте
ток в проводах, соединяющих электродвигатель с сетью, составил I=92,4 A; при этом напряжение, приложенное к электродвигателю, было равно 110 В.
Определить величину магнитного потока электродвигателя.
Решение:
Вращающий момент
электродвигателя при измерении в ньютон-метрах выражается следующим образом:
Ток
в обмотке якоря электродвигателя параллельного возбуждения меньше тока I в проводах, соединяющих электродвигатель с сетью, на величину тока в цепи возбуждения:
Ток в цепи возбуждения определяется по закону Ома:
Следовательно, ток в цепи якоря
Встречная э. д. с, индуктируемая в обмотке якоря,
Коэффициент, объединяющий постоянные величины в выражении для вращающего момента
и характеризующий конструктивные и электрические параметры машины.
Составим отношение постоянных коэффициентов
взяв выражение и числовое значение из задачи 3:
Отношение коэффициентов
есть постоянная величина, которую полезно запомнить.
Зная вращающий момент
и ток в цепи якоря , можно определить коэффициент вращающего момента , умножение которого на ток в цепи якоря дает вращающий момент:
Магнитный поток
9. Электродвигатель постоянного тока отключен от сети и якорь его неподвижен. К обмотке якоря приложили постоянное напряжение 2 В, в результате чего установился постоянный ток 4 А. Затем электродвигатель пустили в ход и при напряжении 220 В, приложенном к зажимам обмотки вращающего якоря, ток в этой обмотке достиг 20 А.
Определить:
1) сопротивление цепи якоря;
2) встречную э. д. с. электродвигателя;
3) модность на входе в электродвигатель и механическую мощность;
4) ток в обмотке якоря:
а) если уменьшить скорость вращения якоря на 20% прн том же напряжении 220 В и прежних условиях в цепи возбуждения;
б) если, не отключая электродвигатель, затормозить вращение вала;
в) если произвести пуск электродвигателя, не вводя пускового реостата.
Решение:
Обмотка неподвижного якоря представляет собой пассивный элемент цепи, и сопротивление ее можно определить по закону Ома:
В обмотке вращающегося якоря индуктируется э. д. с, называемая встречной, так как она направлена встречно току. Поэтому на основании второго закона Кирхгофа
Встречная э. д. с.
Умножим величину
на и введем в уравнение баланса мощностей
где тепловая мощность
, а мощность на входе в электродвигатель
Механическая мощность
Если скорость вращения якоря уменьшится на 20% при том же напряжении
и прежних условиях в цепи возбуждения, то встречная э. д. с. изменится и составит 80% от прежнего значения:
Ток в цепи якоря возрастет и станет равным
Если вал электродвигателя затормозить, не отключая его, то получится ток
так как встречная э. д. с. в неподвижном якоре отсутствует.
д. с. в неподвижном якоре отсутствует.
Такой же величины ток возник бы при пуске электродвигателя, если не ввести реостат для ограничения тока.
10. По условиям испытания, электродвигатель постоянного тока работает при постоянном приложенном напряжении U = 220 В и при постоянном магнитном потоке. Изменение тормозного усилия от 0 до 120 Н на окружности шкива, имеющего диаметр 0,3 м, вызывает изменение по линейному закону тока от 2 до 12 А и скорости вращения якоря от 1100 до 1000 об/мин.
Определить в указанном интервале:
1) вращающий момент
на ободе шкива электродвигателя;
2) мощность на входе в электродвигатель и мощность на его шкиве;
3) к. п. д. электродвигателя.
По числовым данным расчетов построить в одних и тех же осях координат кривые:
Решение:
В случае изменения тока по линейному вакону по такому же закону изменяется и мощность на входе в электродвигатель, так как приложенное напряжение постоянно:
Вращающий момент
на ободе шкива электродвигателя при динамическом равновесии равен тормозному моменту:
Наименьшее и наибольшее значения вращающего момента пропорциональны соответствующим значениям тормозного усилия:
Мощность
на шкиве электродвигателя связана с вращающим моментом следующей зависимостью:
Угловая скорость вращения имеет максимум
и минимум
Следовательно,
Коэффициент полезного действия
, пдя случая
Определим промежуточные значения, построив графики
(рис. 70).
70).
Пользуясь этими графиками, можно записать в табл. 9 ряд значений F, I и n (рис. 70), соответствующих друг другу.
Таблица 9
0 | 27 | 49 | 83,4 | 117 | |
2 | 4,25 | 6 | 9 | 12 | |
1100 | 1075 | 1050 | 1025 | 1000 | |
| |||||
Построим графики (рис. 71) по данным табл. 10.
Таблица 10
440 | 935 | 1320 | 1980 | 2640 | |
0 | 4,02 | 7,38 | 12,46 | 17,68 | |
115 | 112,5 | 109,9 | 107,3 | 104,7 | |
0 | 452,5 | 808,5 | 1337 | 1850 | |
0 | 0,48 | 0,6 | 0,67 | 0,7 | |
| |||||
11. Электродвигатель постоянного тока параллельного возбуждения имеет сопротивление цепи якоря 0,5 ом. При напряжении сети 220 В якорь электродвигателя вращается с такой скоростью и магнитный поток имеет такую величину, что противо-э. д. с. равна 210 В. Регулируя реостатом ток в цепи возбуждения, магнитный поток уменьшают до 0,9 от первоначального значения.
Электродвигатель постоянного тока параллельного возбуждения имеет сопротивление цепи якоря 0,5 ом. При напряжении сети 220 В якорь электродвигателя вращается с такой скоростью и магнитный поток имеет такую величину, что противо-э. д. с. равна 210 В. Регулируя реостатом ток в цепи возбуждения, магнитный поток уменьшают до 0,9 от первоначального значения.
Какое значение примет ток по окончании переходного процесса, вызванного изменением магнитного потока, если статический момент сопротивления по валу электродвигателя, обусловленный приводимым в действие станком, остался без изменения?
Решение:
Ток в обмотке якоря до регулирования
Если уменьшить магнитный поток до
, то в первое мгновение скорость вращения якоря электродвигателя не успеет измениться, противо-э. д. с. уменьшится вследствие уменьшения магнитного потока и станет равной
При этом ток в обмотке якоря возрастет и достигнет значения
Новое значение тока в якоре примерно в 3 раза больше первоначального:
причем магнитный поток уменьшился всего на 10%.
Пропорциональный току в якоре
и магнитному потоку Ф вращающий момент возрастет. Так как статический момент сопротивления на валу электродвигателя остался неизменным, то положительный момент ускорения станет увеличивать скорость вращения якоря. Однако пропорционально скорости вращения будет увеличиваться противо-э. д. с. и ток в обмотке якоря начнет уменьшаться. Ток будет уменьшаться до тех пор, пока вращающий момент не станет равным моменту статического сопротивления на валу электродвигателя при новом значении магнитного потока, равном 0,9Ф. Поэтому ток в якоре
Следовательно, значение тока в якоре увеличилось в 1,11 раза.
Скорость вращения якоря электродвигателя приняла новое (большее) установившееся значение. Если до регулирования
то после регулирования
Если пренебречь величинами
, то отношение скоростей
Таким образом, электродвигатель продолжает работать при новой скорости вращения, в 1,11 раза превышающей прежнюю.
Несмотря на некоторые приближения при рассмотрении вопроса регулирования скорости вращения электродвигателя с помощью реостата в цепи возбуждения, данный пример в целом правильно раскрывает механизм переходного процесса, возникающего при этом регулировании.
12. Электродвигатель постоянного тока параллельного возбуждения при напряжении 220 В имеет номинальный ток 51 А, номинальную скорость вращения 1000 об/мин и ток холостого хода 3 А. Суммарное сопротивление обмотки якоря и дополнительных полюсов 0,25 Ом, сопротивление цепи возбуждения 220 Ом.
Определить:
1) к. п. д. электродвигателя при токах, составляющих 0,25; 0,50; 0,75; 1,00 и 1,25 от номинального тока;
2) скорость вращения электродвигателя при тех же токах;
3) вращающий момент на валу электродвигателя в условиях п. 1 и 2.
Примечание. Ток возбуждения не регулировали.
Построить характеристики
Решение:
Коэффициент полезного действия электродвигателя постоянного тока
где
— мощность на входе в электродвигатель;
— мощность всех потерь энергии.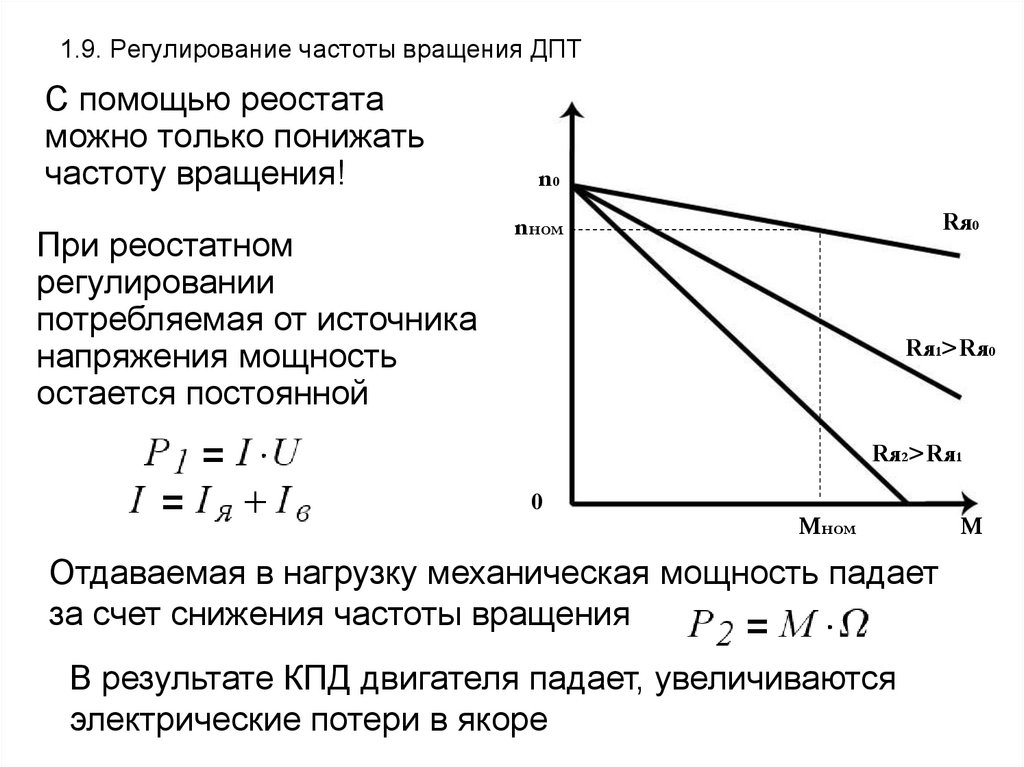
При холостом ходе электродвигателя:
а) потери мощности в цепи возбуждения
б) потери мощности в цепи якоря
где
в) механические потери мощности и потери в стали равны остальной части мощности холостого хода:
Из перечисленных величин при изменении тока нагрузки будут изменяться только потери мощности в цепи якоря, так как, по условию, ток в цепи возбуждения постоянен, а остальные потери мощности изменяются незначительно и считаются постоянными.
Составим табл. 11 для определения к. п. д.
Таблица 11
3 | 13,5 | 26 | 38,5 | 51 | 63,5 | |
1 | ||||||
2 | 12,5 | 25 | 37,5 | 50 | 62,5 | |
1 | 39 | 156 | 351 | 625 | 976 | |
660 | ||||||
660 | 699 | 816 | 1011 | 1285 | 1636 | |
660 | 2970 | 5720 | 8470 | 11220 | 13970 | |
0 | 2271 | 4904 | 7459 | 9935 | 12334 | |
0 | 0,76 | 0,85 | 0,86 | 0,88 | 0,88 | |
| ||||||
Противо-э. д. с. при номинальном режиме
д. с. при номинальном режиме
Так как скорость вращения электродвигателя при этом составляет
, то коэффициент э. д. с.
При неизменном магнитном потоке
— постоянная величина.
Далее, зная значения , определим э. д. с. . Определив э. д. с. Е, найдем скорость вращения: и, наконец, вращающий момент электродвигателя на валу: , где — мощность на валу, кВт.
Составим табл. 12 для определения значений .
Таблица 12
2 | 12,5 | 25 | 37,5 | 50 | 62,5 | |
0,5 | 3,1 | 6,25 | 9,37 | 12,5 | 15,6 | |
219,5 | 216,9 | 213,75 | 210,63 | 207,5 | 204,4 | |
1060 | 1048 | 1032 | 1017 | 1000 | 987 | |
0 | 2271 | 4904 | 7459 | 9935 | 12334 | |
0 | 20,6 | 41,98 | 69,94 | 94,70 | 119,98 | |
| ||||||
На основании данных табл. 12 построены характеристики
12 построены характеристики
(рис. 72).
13. Электродвигатель постоянного тока последовательного возбуждения включен в сеть напряжением U = 220 В (рис. 73). Номинальная скорость вращения
. Номинальный вращающий момент . Сопротивление обмотки якоря , сопротивление обмотки возбуждения , к. п. д. двигателя .
Определить:
1) номинальную мощность на валу электродвигателя;
2) мощность на входе в электродвигатель;
3) ток электродвигателя;
4) мощность потерь в обмотке якоря и обмотке возбуждения;
5) сопротивление пускового реостата для возможности пуска с кратностью пускового тока ;
6) пусковой момент при пуске согласно п. 5, если известно, что увеличение тока возбуждения в 2,5 раза соответствует увеличению магнитного потока в 1,8 раза.
Решение:
Номинальная мощность на валу двигателя
Мощность на входе в электродвигатель
В двигателе последовательного возбуждения
или
Зная ток и сопротивление обмотки якоря, легко определить мощность потерь в обмотке якоря:
Аналогично определяем мощность потерь в обмотке возбуждения:
По условию,
Сопротивление пускового реостата
где
— пусковой ток якоря.
Для определения величины пускового момента воспользуемся формулой
Отношение пускового момента к номинальному моменту
Двигатели последовательного возбуждения обладают весьма большим пусковым моментом. Это свойство особенно ценно в случае применения их в качестве тяговых двигателей.
14. В схеме генератор—двигатель непосредственно к щеткам генератора постоянного тока независимого возбуждения присоединен якорь электродвигателя постоянного тока (рис. 74). В эту цепь входят сопротивления: 1) обмотки якоря генератора
; 2) обмотки якоря двигателя ; 3) щеток генератора ; 4) щеток двигателя ; 5) проводов (и другие неучтенные сопротивления) ; э. д. с. генератора , противо-э. д. с. двигателя .
Составить баланс мощностей.
Решение:
Ток в контуре, образованном обмотками якоря генератора и двигателя,
Мощность генератора
Механическая мощность электродвигателя
Потери мощности в обмотке якоря генератора
Потери мощности в обмотке двигателя
Потери мощности в щетках генератора
Потери мощности в щетках двигателя
Потери мощности в проводах
Очевидно,
Так как правая часть равенства
Коэффициент полезного действия в рассмотренном контуре
При помощи реостата
изменяют ток в обмотке возбуждения генератора и регулируют напряжение на щетках как генератора, так и двигателя, а следовательно, регулируют скорость вращения электродвигателя. При этом в главном контуре, образованном обмотками якоря генератора и двигателя, отсутствует пусковой реостат и не происходит связанных с реостатом потерь энергии.
При этом в главном контуре, образованном обмотками якоря генератора и двигателя, отсутствует пусковой реостат и не происходит связанных с реостатом потерь энергии.
Как управляются двигатели постоянного тока? — Регулирование скорости двигателей постоянного тока
Двигатели постоянного тока питаются от постоянного тока. Они имеют широкий спектр применения в таких продуктах, как бытовая техника, транспортные средства и заводы. Можно сказать, что они играют жизненно важную роль в нашей жизни.
Однако многие пользователи выражают неуверенность в том, как управлять скоростью двигателей постоянного тока. На этой странице представлено простое введение в то, как это делается.
Что такое двигатель постоянного тока?
Начнем с того, что электродвигатель — это машина, которая использует электричество для вращения вала, тем самым преобразуя электрическую энергию в механическую. Электродвигатели в целом делятся на следующие три типа.
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
Двигатели переменного тока приводятся в действие переменным током, а шаговые двигатели приводятся в действие импульсами электроэнергии. С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
- Высокий пусковой момент и возможность вращения на высоких скоростях
- Мощность двигателя пропорциональна приложенному напряжению
Двигатели постоянного тока подразделяются на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока. Коллекторные двигатели постоянного тока имеют катушки в своем роторе и изменяют способ прохождения тока через катушки на основе механизма, использующего коммутаторы и щетки. Коллекторные двигатели постоянного тока создают электрические и акустические шумы и требуют частого обслуживания, поскольку их щетки и коллектор являются расходными частями. Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если не требуется регулирование скорости.
Бесщеточный двигатель постоянного тока, напротив, не требует коммутатора и щеток, поскольку в роторе имеется постоянный магнит. Это, однако, означает, что им требуется схема привода. Они также отличаются низким уровнем обслуживания, бесшумной работой и длительным сроком службы.
Это, однако, означает, что им требуется схема привода. Они также отличаются низким уровнем обслуживания, бесшумной работой и длительным сроком службы.
Характеристики двигателей постоянного тока
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании благодаря простоте изменения их скорости. Итак, как это достигается на практике? Следующее объяснение начинается с рассмотрения характеристик двигателя постоянного тока.
Характеристики двигателя постоянного тока представлены кривой крутящий момент-скорость, которая наклонена вниз вправо, с крутящим моментом в качестве горизонтальной оси и скоростью в качестве вертикальной оси. Скорость самая высокая, когда нет нагрузки, спадает вправо, пока не будет достигнут максимальный крутящий момент при нулевой скорости.
Крутящий момент и скорость изменяются в зависимости от нагрузки, как показано на этой кривой зависимости крутящего момента от скорости. Глядя на график ниже, давайте рассмотрим двигатель, вращающийся со скоростью ω0 с крутящим моментом T0. Если крутящий момент нагрузки затем увеличится до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогичным образом, если момент нагрузки далее увеличивается до T2, скорость падает до ω2.
Если крутящий момент нагрузки затем увеличится до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогичным образом, если момент нагрузки далее увеличивается до T2, скорость падает до ω2.
Крутящий момент и скорость двигателя постоянного тока
Взгляд на взаимосвязь между крутящим моментом и током показывает, что они пропорциональны друг другу. Соотношение между ними является постоянным для двигателя, при этом соотношение остается неизменным независимо от изменений скорости двигателя или напряжения привода. Это означает, что измерения тока двигателя достаточно для определения крутящего момента двигателя.
Момент-скорость двигателя постоянного тока и кривая момента-тока
Что происходит при изменении напряжения привода?
Итак, что происходит с кривой крутящий момент-скорость, когда изменяется напряжение, используемое для привода двигателя постоянного тока? На приведенном ниже графике показаны кривые крутящий момент-скорость для различных напряжений. Удвоение напряжения привода удваивает как скорость двигателя без нагрузки, так и пусковой момент (крутящий момент, когда двигатель зафиксирован). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость вверх, параллельно. Кривая крутящий момент-скорость для двигателя постоянного тока может быть скорректирована по желанию путем изменения напряжения, подаваемого на двигатель.
Удвоение напряжения привода удваивает как скорость двигателя без нагрузки, так и пусковой момент (крутящий момент, когда двигатель зафиксирован). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость вверх, параллельно. Кривая крутящий момент-скорость для двигателя постоянного тока может быть скорректирована по желанию путем изменения напряжения, подаваемого на двигатель.
Напряжение привода двигателя и кривая крутящего момента
Как заставить двигатель постоянного тока вращаться с необходимой скоростью
Теперь, учитывая эти характеристики, как вы можете вращать двигатель с требуемой скоростью при любом заданном моменте нагрузки?
Кривая момент-скорость двигателя постоянного тока преобразуется в зависимости от изменения напряжения привода. Это означает, что указанная выше цель может быть достигнута простой регулировкой напряжения возбуждения. Глядя на график ниже, если требуется вращение со скоростью ω1, когда момент нагрузки равен T0, например, напряжение привода V4 слишком низкое, что приводит к скорости ω2. Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 как раз подходит для достижения желаемой скорости ω1.
Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 как раз подходит для достижения желаемой скорости ω1.
Напряжение и скорость привода двигателя
Регулируя таким образом напряжение привода, можно заставить двигатель постоянного тока вращаться с желаемой скоростью независимо от крутящего момента нагрузки.
Методы управления напряжением привода
Два способа регулировки напряжения привода: линейное управление и ШИМ-управление.
Линейное управление работает путем включения переменного резистора последовательно с двигателем и регулировки сопротивления для изменения напряжения на двигателе. Хотя транзистор или другое полупроводниковое устройство можно использовать в качестве последовательно соединенного переменного резистора, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводником), и поэтому в наши дни он используется редко.
Альтернативным методом является ШИМ-управление. Напряжение, подаваемое на двигатель, можно изменять, включая и выключая полупроводниковый переключатель (например, транзистор или полевой транзистор) на высокой скорости, при этом напряжение определяется шириной импульса включения и выключения. Высокая эффективность этого метода делает его наиболее распространенным в настоящее время.
Линейное управление
ШИМ-управление
Регулятор скорости двигателя
Использование этих методов позволяет гибко регулировать скорость двигателя постоянного тока. Однако для поддержания постоянной скорости вращения двигателя требуется дополнительное управление. Это связано с тем, что крутящий момент двигателя зависит от самой нагрузки, а также от других факторов, таких как температура, влажность и изменения во времени. Простое вождение двигателя с постоянным напряжением приведет к тому, что его скорость будет колебаться при изменении нагрузки.
Поддержание постоянной скорости, несмотря на переменную нагрузку, требует постоянной регулировки напряжения привода в ответ на эти изменения нагрузки. На приведенном ниже графике показан пример, когда момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае снижение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, для поддержания постоянной скорости двигателя ω0 требуется, чтобы напряжение привода увеличилось до V2.
На приведенном ниже графике показан пример, когда момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае снижение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, для поддержания постоянной скорости двигателя ω0 требуется, чтобы напряжение привода увеличилось до V2.
Контроль скорости
Скорость измеряется датчиком, прикрепленным к двигателю. Вычисляется разница между измеренной и требуемой скоростью двигателя (ошибка скорости), а напряжение привода регулируется таким образом, чтобы оно увеличивалось, если скорость была слишком низкой, и уменьшалась, если скорость была слишком высокой. При этом поддерживается постоянная скорость двигателя. В то время как в прошлом для управления напряжением возбуждения использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.
Схема управления скоростью двигателя постоянного тока
Схема управления скоростью бесщеточного двигателя постоянного тока
Датчик скорости
Выводит сигнал, указывающий скорость двигателя.
 К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы.
К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы.Цепь определения скорости
Расчет скорости двигателя по сигналу датчика скорости.
Задание скорости
Выводит целевую скорость двигателя.
Компаратор
Вычисляет разницу между заданием скорости и измеренной скоростью.
Схема расчета напряжения привода
Вычисляет напряжение привода двигателя на основе расчетной ошибки скорости.
Цепь привода
Цепь, которая регулирует напряжение, подаваемое на двигатель, в соответствии с сигналом напряжения привода.
Двигатель постоянного тока может работать в устойчивом режиме, контролируя его скорость так, чтобы она оставалась постоянной независимо от изменений нагрузки. Эти двигатели также подходят для широкого спектра методов управления, которые могут быть реализованы с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Эти двигатели также подходят для широкого спектра методов управления, которые могут быть реализованы с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Двигатели постоянного тока: простые в использовании двигатели с простой регулировкой скорости
Двигатели постоянного тока питаются от постоянного тока, и, в отличие от двигателей переменного тока, их скорость легко регулируется. Характеристики двигателя постоянного тока представлены его кривой крутящий момент-скорость, в которой скорость и крутящий момент нагрузки обратно пропорциональны. Эта кривая крутящий момент-скорость преобразуется в зависимости от изменения напряжения привода. Соответственно, регулируя напряжение, подаваемое на двигатель постоянного тока, его можно заставить работать на любой скорости независимо от крутящего момента нагрузки.
Для изменения напряжения привода двигателя можно использовать линейное или ШИМ-управление.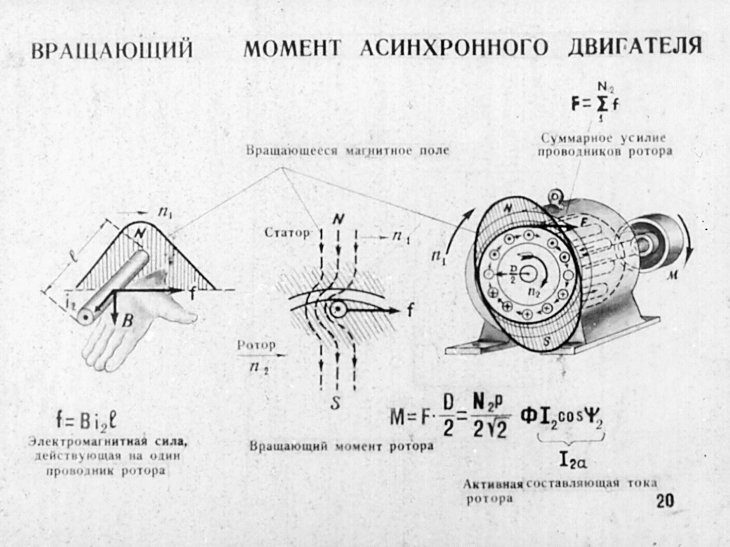 ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение, включая и выключая полупроводниковый переключатель с высокой скоростью таким образом, что изменение ширины импульса включения и выключения изменяет напряжение.
ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение, включая и выключая полупроводниковый переключатель с высокой скоростью таким образом, что изменение ширины импульса включения и выключения изменяет напряжение.
Решение проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки. Вы боретесь со следующими проблемами?
Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но вам нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
- Разработка двигателя и связанных с ним компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
- Уникальное требование
- Вам нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, который дает вам требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов Выходная скорость против. Крутящий момент Двигатели постоянного тока – напряжение по сравнению с. Выходная скорость против. Крутящий момент
Взаимосвязь между напряжением, крутящим моментом и выходной скоростью является частой темой обсуждения между нашими клиентами и инженерами по продажам Precision Microdrives.
Целью следующей статьи является обсуждение и уточнение взаимосвязи между этими параметрами и методами их использования вместе с другими ресурсами, чтобы понять все возможности наших двигателей постоянного тока и мотор-редукторов.
Определения терминов, используемых в нашем техпаспорте, можно найти ниже со ссылками, щедро разбросанными по всей статье для дальнейшего чтения.
Крутящий момент и скорость
Крутящий момент можно определить как «крутящую силу», которая имеет тенденцию вращать объект вокруг точки опоры. Что касается двигателей постоянного тока и мотор-редукторов, мы обычно будем называть «номинальный крутящий момент» «номинальной нагрузкой», чтобы избежать путаницы в наших значениях.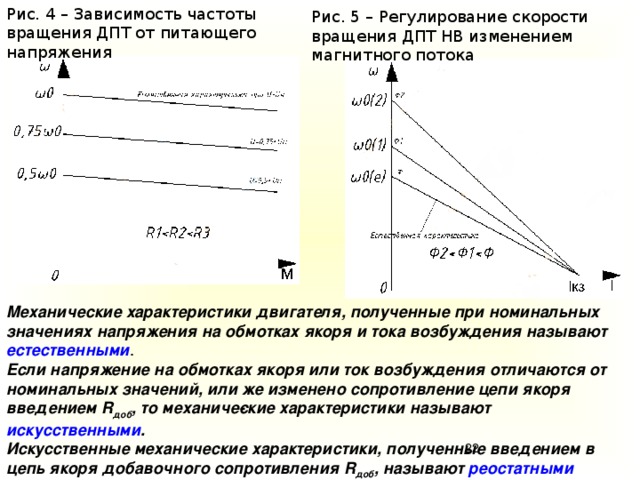 В конечном счете, эти два термина представляют одно и то же значение — вращательное усилие, приложенное к выходному валу.
В конечном счете, эти два термина представляют одно и то же значение — вращательное усилие, приложенное к выходному валу.
Говоря о скорости, мы обычно имеем в виду угловую скорость выходного вала наших двигателей постоянного тока и мотор-редукторов (обычно в оборотах в минуту). В зависимости от приложения этот параметр будет влиять на скорость выполнения конкретной функции и может существенно повлиять на общую производительность устройства.
Зачем менять крутящий момент?
Наиболее очевидным преимуществом изменения крутящего момента является поддержание постоянной скорости при изменении нагрузки двигателя с учетом взаимозависимого характера скорости, крутящего момента и напряжения.
Хотя этот пример может быть устаревшим, аудиокассеты — отличный способ объяснить, как в некоторых приложениях необходимо изменять крутящий момент, чтобы соответствовать изменяющейся нагрузке. По мере воспроизведения кассеты и перемещения аудиозаписи с одного шпинделя на другой нагрузка на приводной двигатель будет изменяться. Тем не менее, воспроизведение должно оставаться с постоянной скоростью, иначе это повлияет на высоту тона звука.
Тем не менее, воспроизведение должно оставаться с постоянной скоростью, иначе это повлияет на высоту тона звука.
Также бывают случаи, когда нагрузка двигателя резко меняется между операциями, а не медленно, как в примере с кассетой. Это часто происходит со шкивами и подъемниками: двигатель останавливается в крайнем случае, когда груз прикрепляется или снимается. Здесь поддержание постоянной скорости не так важно, как способность двигателя выдерживать различные крутящие нагрузки, поскольку для перемещения более тяжелого объекта требуется больший выходной крутящий момент, чем для легкого объекта или без нагрузки.
Все эти приложения имеют общую тему переменной нагрузки, прикрепленной к двигателю. Если ваше приложение предполагает фиксированную нагрузку, то, вероятно, вам будет интереснее варьировать скорость.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Зачем менять скорость?
Возможность изменять скорость двигателя при поддержании постоянного крутящего момента важна для многих приложений по разным причинам.
Примером приложения, требующего переменной скорости и постоянного крутящего момента, является проигрыватель аудио компакт-дисков, поскольку обычно наблюдается, что в одних точках компакт-диск будет вращаться быстрее, чем в других. Это связано с тем, что информация хранится в спиральных круговых дорожках на диске, а длина/окружность дорожек прямо пропорциональна количеству информации, хранящейся на них. Это означает, что скорость должна быть уменьшена по мере того, как лазер считывает данные с крайних дорожек, потому что за один оборот поступает больше информации. И наоборот, скорость увеличивается по мере того, как лазер считывает самые внутренние дорожки, поскольку окружности спирали меньше и, следовательно, содержат меньше информации за один оборот.
Без возможности регулировать скорость двигателя (с напряжением) при поддержании этого постоянного крутящего момента было бы очень сложно считывать и воспроизводить эту информацию с постоянной скоростью.
Этот же принцип может быть применен к большому количеству приложений и часто имеет решающее значение для их успешной работы. Многие из наших двигателей постоянного тока и мотор-редукторов могут работать при самых разных скоростях и нагрузках, что позволяет нашим клиентам изучить возможности своего проекта и, как правило, найти подходящее решение с одним двигателем.
Как читать типовую таблицу характеристик производительности
Таблица типичных рабочих характеристик находится на первой странице каждого из наших технических паспортов. Этот график является чрезвычайно полезным инструментом, иллюстрирующим типичное поведение отдельного двигателя.
Как мы уже обсуждали ранее, многие из наших клиентов ищут двигатель или мотор-редуктор, который будет работать с заданной скоростью и нагрузкой. Одним из лучших мест для поиска решения является наш онлайн-каталог, и мы всегда можем помочь порекомендовать подходящие двигатели и обсудить варианты настройки. Поскольку скорость двигателя в двигателях постоянного тока и редукторных двигателях в основном определяется нагрузкой и напряжением привода, значение «Номинальная скорость» в техпаспорте берется при «Номинальном напряжении» и «Номинальной нагрузке». Это означает, что значения скорости, указанные в технических характеристиках, берутся в контролируемых и конкретных условиях и не отражают всех возможностей какого-либо отдельного двигателя. Именно здесь типичная диаграмма производительности является полезным инструментом для просмотра более широкого диапазона возможностей двигателя.
Это означает, что значения скорости, указанные в технических характеристиках, берутся в контролируемых и конкретных условиях и не отражают всех возможностей какого-либо отдельного двигателя. Именно здесь типичная диаграмма производительности является полезным инструментом для просмотра более широкого диапазона возможностей двигателя.
108-106 Motor Performance Graph
Графики для наших двигателей постоянного тока и мотор-редукторов предполагают фиксированное напряжение и показывают, как потребляемый ток, мощность, КПД и скорость двигателя зависят от изменения нагрузки. Каждый из затронутых параметров имеет свою независимую линию производительности и соответствующую шкалу по оси Y.
Синяя линия на диаграмме типичных характеристик 108-106 (выше) показывает скорости, при которых двигатель будет работать от точки холостого хода до крутящего момента (около 0,725 мНм) и позволяет нам исследовать производительность двигателя, а также понять взаимосвязь между скоростью и крутящим моментом для отдельного двигателя.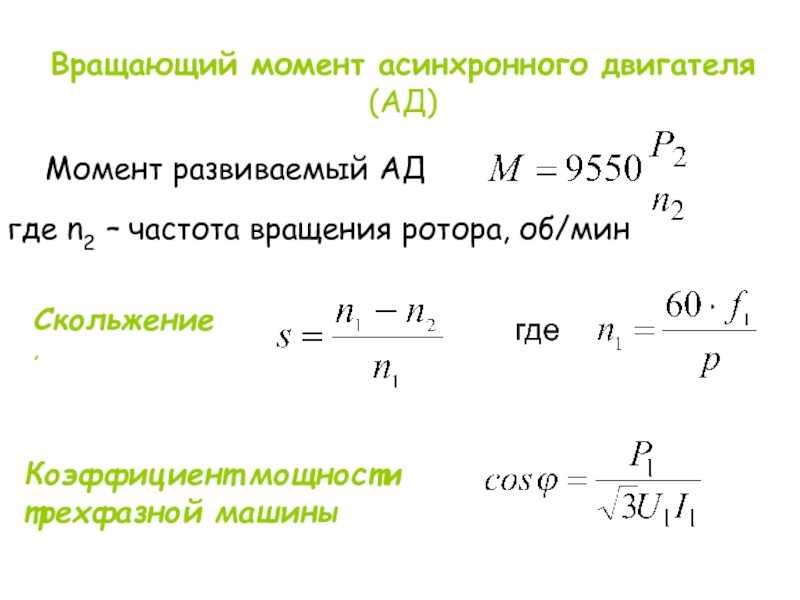
Например; если клиенту требуется постоянная скорость и крутящий момент 1900 об/мин и 0,65 мНм соответственно, в разделе «ключевые характеристики» (выше) листа данных будет указано, что 108-106 не подходит, поскольку в нем указано:
.
Номинальная нагрузка – 0,15 мН·м
Номинальная скорость нагрузки – 12 600 об/мин
Однако после проверки диаграммы производительности при нагрузке 0,65 мНм по оси X синяя линия производительности (скорость) указывает на соответствующей оси Y, что скорость будет равна 1900 об/мин. Изображение выше иллюстрирует это и демонстрирует, что 108-106 действительно подходит для клиентов, исходя из их требований к фиксированной скорости и крутящему моменту. Эту диаграмму также можно расширить, чтобы проиллюстрировать диапазон возможностей двигателя, если он будет использоваться с динамической нагрузкой/скоростью.
Связь между скоростью, крутящим моментом и напряжением
Теперь, когда мы обсудили, как читать диаграмму производительности, мы можем взглянуть на взаимосвязь между скоростью и крутящим моментом.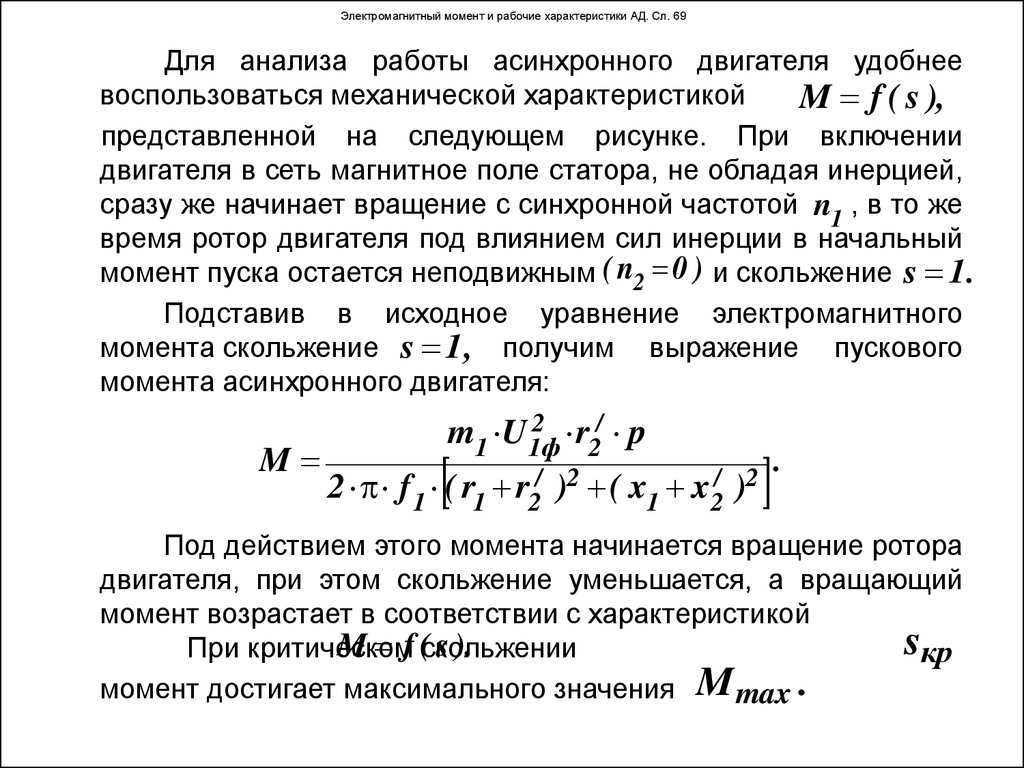 В этом разделе мы обрисуем взаимосвязь между скоростью и крутящим моментом и объясним пределы каждого из них, прежде чем рассматривать дальнейшее влияние напряжения на эти параметры.
В этом разделе мы обрисуем взаимосвязь между скоростью и крутящим моментом и объясним пределы каждого из них, прежде чем рассматривать дальнейшее влияние напряжения на эти параметры.
N/L скорость и момент опрокидывания на графиках производительности двигателя
Если предположить, что двигатель приводится в действие при фиксированном напряжении, есть две точки, которые описывают пиковую производительность двигателя на каждом конце. «Холостой ход» (N/L) и «опрокидывающий момент»
- Момент остановки представляет собой точку, в которой двигатель достигает максимальной рабочей нагрузки. В этот момент вал больше не будет вращаться, и двигатель будет находиться в «заглохшем» состоянии. Обратите внимание, что двигатель не должен работать в режиме остановки, так как это почти наверняка приведет к преждевременному выходу из строя.
- Скорость холостого хода — это максимальная выходная скорость, которую двигатель достигает при заданном напряжении. В этот момент двигатель работает свободно и без внешней нагрузки
Наши двигатели постоянного тока и мотор-редукторы могут работать в любом диапазоне между этими пределами до остановки. Если мы посмотрим на синюю линию производительности, связь между скоростью и крутящим моментом довольно легко понять — крутящий момент обратно пропорционален скорости двигателя — начиная с точки холостого хода/полной скорости и, по мере увеличения нагрузки, скорость уменьшается пропорционально, пока двигатель не заглохнет.
Если мы посмотрим на синюю линию производительности, связь между скоростью и крутящим моментом довольно легко понять — крутящий момент обратно пропорционален скорости двигателя — начиная с точки холостого хода/полной скорости и, по мере увеличения нагрузки, скорость уменьшается пропорционально, пока двигатель не заглохнет.
Хотя диаграмма производительности показывает, как скорость влияет на применение различных нагрузок, она не указывает на то, что скорость наших двигателей постоянного тока также прямо пропорциональна приложенному напряжению. Теорию, лежащую в основе этого принципа, можно найти здесь. Короче говоря, это означает, что мы можем управлять скоростью двигателя независимо от крутящего момента, и это позволяет нам поддерживать постоянную скорость для переменной нагрузки, а также поддерживать постоянный крутящий момент при изменении скорости двигателя.
Этот принцип используется для обеспечения правильного воспроизведения нашего проигрывателя компакт-дисков и кассеты и, вероятно, будет включать систему обратной связи с обратной связью, которая будет измерять скорость двигателя и регулировать напряжение возбуждения, чтобы либо поддерживать постоянную скорость при переменной нагрузке, либо обеспечивать переменная скорость для фиксированной нагрузки.
Как мы можем изменить производительность двигателя
Существует несколько методов настройки характеристик двигателя, будь то индивидуальное решение, адаптированное к потребностям клиента, или простая регулировка режима работы двигателя. Некоторые распространенные модификации перечислены ниже:
- Обмотки: Путем изменения количества витков в обмотках двигателя и/или площади поперечного сечения используемого провода можно управлять сопротивлением клемм, рабочим напряжением/током и индуктивностью клемм. Это означает, что как электрические, так и механические характеристики двигателя могут быть легко адаптированы к конкретной спецификации.
- Передаточные числа коробки передач: коробки передач являются эффективным методом точного изменения характеристик двигателя постоянного тока с использованием одной или нескольких ступеней редуктора. Несмотря на то, что мы поставляем мотор-редукторы со склада, многие из наших клиентов хотели бы разработать свой собственный набор шестерен.
 Если вы хотите поэкспериментировать со своими собственными зубчатыми цепями, простые уравнения для шестерен можно найти в AB-024. Тем не менее, мы можем предложить нестандартные редукторы и модификации стандартных деталей, поэтому, пожалуйста, не стесняйтесь обращаться к инженеру, если вы хотите обсудить ваши требования и варианты, которые мы можем предложить.
Если вы хотите поэкспериментировать со своими собственными зубчатыми цепями, простые уравнения для шестерен можно найти в AB-024. Тем не менее, мы можем предложить нестандартные редукторы и модификации стандартных деталей, поэтому, пожалуйста, не стесняйтесь обращаться к инженеру, если вы хотите обсудить ваши требования и варианты, которые мы можем предложить. - Управляющее напряжение: это может быть простой и экономичный способ управления производительностью наших двигателей. Есть несколько способов, которыми вы можете настроить управляющее напряжение для вашего двигателя, включая ШИМ и даже специальные микросхемы драйвера. Ранее мы обсуждали эти темы более подробно по следующим ссылкам – 1 и 2
- . Выбор материала. Используемые материалы могут существенно повлиять на общую производительность вашего мотор-редуктора. Некоторые из возможных вариантов здесь перечислены ниже
- Материал редуктора: общая точка отказа микроредукторов возникает на последней ступени редуктора.
 Это точка приложения наибольшей силы при приложении нагрузки к двигателю. В этом случае редуктор может выйти из строя задолго до того, как будет достигнут момент остановки двигателя, и потенциальные возможности не будут использованы полностью. В этом случае на последней ступени (ступенях) можно добавить более мощные шестерни, чтобы можно было достичь более высокого крутящего момента и более широкого диапазона производительности. На практике это использовалось с 206-108, который глохнет примерно на 17 мНм из-за отказа шестерни. На графике характеристик это характеризуется резкой остановкой на линии крутящий момент-скорость задолго до приближения к остановке (0 об/мин). Вставляя металлическую шестерню на последнем этапе, достигается крутящий момент примерно 34 мНм, что удваивает возможности двигателя по крутящему моменту и открывает более широкий спектр возможностей. Ему был присвоен номер детали 206-10C 9.0014
Это точка приложения наибольшей силы при приложении нагрузки к двигателю. В этом случае редуктор может выйти из строя задолго до того, как будет достигнут момент остановки двигателя, и потенциальные возможности не будут использованы полностью. В этом случае на последней ступени (ступенях) можно добавить более мощные шестерни, чтобы можно было достичь более высокого крутящего момента и более широкого диапазона производительности. На практике это использовалось с 206-108, который глохнет примерно на 17 мНм из-за отказа шестерни. На графике характеристик это характеризуется резкой остановкой на линии крутящий момент-скорость задолго до приближения к остановке (0 об/мин). Вставляя металлическую шестерню на последнем этапе, достигается крутящий момент примерно 34 мНм, что удваивает возможности двигателя по крутящему моменту и открывает более широкий спектр возможностей. Ему был присвоен номер детали 206-10C 9.0014 - Смазочные материалы: Температура окружающей среды и рабочая температура в значительной степени влияют на эффективность редукторного двигателя и общую производительность, достигаемую на выходном валу.
 В то время как электрический КПД двигателя часто может увеличиваться при низких температурах, эффективность редуктора и эффективность смазки могут снижаться, что приводит к снижению общей производительности. Распространенным методом уменьшения этого эффекта является использование специальной низкотемпературной смазки. Это может повысить КПД редуктора и, следовательно, производительность двигателя на выходе. Это означает, что диапазон температур, указанный в техпаспорте, не является абсолютным пределом, и существует несколько способов его расширения. Если возникнут вопросы, инженеры Precision Microdrives будут рады помочь
В то время как электрический КПД двигателя часто может увеличиваться при низких температурах, эффективность редуктора и эффективность смазки могут снижаться, что приводит к снижению общей производительности. Распространенным методом уменьшения этого эффекта является использование специальной низкотемпературной смазки. Это может повысить КПД редуктора и, следовательно, производительность двигателя на выходе. Это означает, что диапазон температур, указанный в техпаспорте, не является абсолютным пределом, и существует несколько способов его расширения. Если возникнут вопросы, инженеры Precision Microdrives будут рады помочь - Энкодеры: если вам требуется больший контроль над мотор-редуктором или вы используете его в приводе позиционирования, вам может потребоваться энкодер. Это типичная модификация, которую мы можем предложить, начиная от простых тахометров для измерения скорости, инкрементных энкодеров для позиционирования по одному эталону и заканчивая абсолютными энкодерами для точного позиционирования выходного вала.
 Эти энкодеры также можно использовать в управлении с обратной связью для поддержания скорости при изменении крутящего момента, изменения скорости для постоянного крутящего момента или любой комбинации этих двух способов (примеры обсуждались ранее в этой статье). Пожалуйста, свяжитесь с инженером Precision Microdrives, если вам нужна дополнительная информация о том, что мы можем поставить
Эти энкодеры также можно использовать в управлении с обратной связью для поддержания скорости при изменении крутящего момента, изменения скорости для постоянного крутящего момента или любой комбинации этих двух способов (примеры обсуждались ранее в этой статье). Пожалуйста, свяжитесь с инженером Precision Microdrives, если вам нужна дополнительная информация о том, что мы можем поставить
Любая комбинация вышеперечисленного может быть использована вместе для достижения широкого диапазона мощностей наших мотор-редукторов. Таким образом, даже если вы не можете найти диаграмму производительности мотор-редуктора, соответствующую вашим требованиям, свяжитесь с нашими инженерами, поскольку мы можем найти множество способов удовлетворить ваши требования.
Ограничения
Как и все хорошее, есть ограничения на то, чего можно достичь. Целью этого раздела является описание некоторых связанных ограничений, возникающих при модификации мотор-редуктора.
- Обмотки: К сожалению, без значительных изменений и затрат на разработку провода с определенной площадью поперечного сечения иногда трудно обеспечить точные характеристики при требуемом сопротивлении на клеммах, рабочем напряжении/токе и индуктивности на клеммах.
 В этом случае требования часто выполняются очень точно, и отклонения могут быть незначительными. Здесь также действуют ограничения по размерам, поскольку для обмоток имеется очень ограниченное пространство. На практике это означает, что определенные механические/электрические характеристики не могут быть достигнуты с данным двигателем из-за доступного пространства оболочки для обмоток и требуемой площади поперечного сечения/количества проводов обмотки. Разумеется, компания Precision Microdrives будет рада оценить осуществимость вашего запроса, поэтому, пожалуйста, не стесняйтесь обращаться к нам с вашими требованиями
В этом случае требования часто выполняются очень точно, и отклонения могут быть незначительными. Здесь также действуют ограничения по размерам, поскольку для обмоток имеется очень ограниченное пространство. На практике это означает, что определенные механические/электрические характеристики не могут быть достигнуты с данным двигателем из-за доступного пространства оболочки для обмоток и требуемой площади поперечного сечения/количества проводов обмотки. Разумеется, компания Precision Microdrives будет рада оценить осуществимость вашего запроса, поэтому, пожалуйста, не стесняйтесь обращаться к нам с вашими требованиями - Свойства материалов: Свойства материалов также являются ограничением при рассмотрении достижимых модификаций наших двигателей.
Как уже говорилось, смазочные материалы для низких температур можно использовать для улучшения характеристик материала при определенных температурах, однако существуют очевидные физические ограничения для конкретных материалов. К заметным ограничивающим свойствам относятся коэффициент теплового расширения, прочность материала, температуры плавления и многие другие.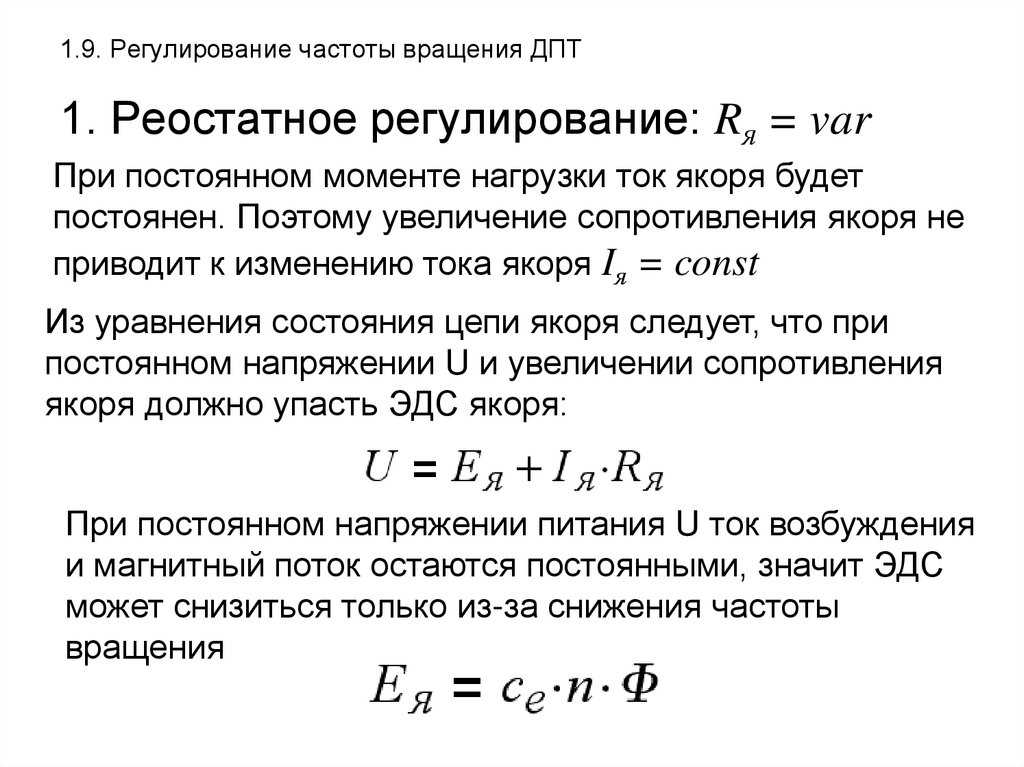 Если у вас есть какие-либо вопросы, связанные с этим, пожалуйста, свяжитесь с нами
Если у вас есть какие-либо вопросы, связанные с этим, пожалуйста, свяжитесь с нами
В этом разделе мы обсудили несколько очевидных ограничений, возникающих при модификации мотор-редуктора. Во многих случаях эти ограничения можно преодолеть, если менее важные параметры более гибкие. Поэтому, пожалуйста, обратитесь к нашим инженерам, чтобы оценить, что можно реализовать в вашем приложении.
Заключение
В этой статье мы обсудили некоторые причины, по которым пользователь может изменять скорость и крутящий момент двигателя, и рассмотрели конкретные примеры для каждой ситуации. Это побудило нас рассмотреть пределы скорости и крутящего момента для наших мотор-редукторов при постоянном напряжении. Здесь мы поняли, что при фиксированном напряжении наши двигатели могут работать в широком диапазоне скоростей и крутящих моментов между точкой холостого хода (полная скорость) и точкой максимальной нагрузки (опрокидывание).
Мы также обсудили, как читать «таблицу типичных рабочих характеристик», чтобы понять весь диапазон возможностей крутящего момента и скорости данного двигателя (при его номинальном напряжении). Отсюда мы увидели, что соотношение между скоростью и крутящим моментом обратно пропорционально от точки холостого хода до крутящего момента, и обсудили, как мы можем отрегулировать управляющее напряжение, чтобы поддерживать постоянную скорость или крутящий момент, когда другая переменная является динамической.
Отсюда мы увидели, что соотношение между скоростью и крутящим моментом обратно пропорционально от точки холостого хода до крутящего момента, и обсудили, как мы можем отрегулировать управляющее напряжение, чтобы поддерживать постоянную скорость или крутящий момент, когда другая переменная является динамической.
Последний раздел этого бюллетеня был посвящен описанию некоторых методов управления двигательной активностью. Некоторые из этих методов легко реализуются, и с ними можно экспериментировать при тестировании, в то время как другие являются постоянными модификациями, которые могут быть предусмотрены для конкретной спецификации. Если вы хотите рассмотреть варианты, которые у вас есть для вашего проекта, свяжитесь с одним из наших инженеров, чтобы обсудить ваши требования и варианты, которые мы можем вам предложить.
Информационный бюллетень
Подпишитесь на получение новых блогов, тематических исследований и ресурсов прямо на ваш почтовый ящик.
Зарегистрироваться
Имя
Первое
Последний
Электронная почта (обязательно)
Согласие с условиями (обязательно)
Я прочитал и согласен с Условиями и политикой конфиденциальности Precision Microdrives
Согласие на обсуждение (обязательно)
Я рад, что Precision Microdrives получил мои данные, чтобы мы могли обсудить мой запрос
Подробнее
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и испытанный сложный механизм — мы здесь, чтобы помочь. Узнайте больше о нашей компании.
Узнайте больше о нашей компании.
- Почему PMD
- О нас
- Двигатели
- Механизмы
- Карьера
Пусковой крутящий момент двигателя постоянного тока
Пусковой крутящий момент — это максимальный крутящий момент, который двигатель может передать механической нагрузке при вращении. Двигатель постоянного тока способен обеспечить высокий пусковой крутящий момент, и этот двигатель подходит для управления нагрузками с высокой инерцией, такими как вращающаяся печь, которая требует высокого пускового крутящего момента во время пуска. Двигатель постоянного тока способен развивать крутящий момент в 6 раз больше, чем его номинальный крутящий момент во время запуска двигателя.
Если нагрузка требует более высокого крутящего момента, чем максимальный крутящий момент двигателя, двигатель остановится и отключится из-за перегрузки. Момент опрокидывания — это максимальный крутящий момент, при котором скорость двигателя равна нулю. Когда крутящий момент, требуемый нагрузкой, превышает максимальный крутящий момент, скорость двигателя становится равной нулю, или мы можем сказать, что двигатель не способен вращать механическую нагрузку.
Когда крутящий момент, требуемый нагрузкой, превышает максимальный крутящий момент, скорость двигателя становится равной нулю, или мы можем сказать, что двигатель не способен вращать механическую нагрузку.
Уравнение крутящего момента двигателя постоянного тока :
Крутящий момент двигателя постоянного тока зависит от магнитного поля и величины тока якоря.
T=K* Φ *Ia
Где
T= крутящий момент,
Φ =поток,
Ia= ток якоря
В двигателе с независимым возбуждением поток постоянный, поэтому крутящий момент двигателя постоянного тока зависит от тока якоря. Ток якоря двигателя постоянного тока очень высок при запуске двигателя. Принципиальная схема двигателя постоянного тока с независимым возбуждением приведена ниже.
Обратная ЭДС, индуцированная в якоре, может быть выражена как ;
Eb=V-Ia*Ra
Ia=(V-Eb)/Ra
Когда на якорь подается постоянное напряжение, противо-ЭДС, индуцируемая в якоре, равна нулю, и двигатель потребляет очень большой ток.
Обратная ЭДС, создаваемая двигателем постоянного тока, зависит от скорости двигателя и магнитного поля. Обратная ЭДС двигателя постоянного тока может быть выражена с помощью математической формулы.
Eb=ΦNZ/60 *(P/A) ——(1)
Где
Eb= Противо-ЭДС, индуцированная в якоре
Φ = Поток основного поля (Вб/м2)
N = Скорость двигатель (об/мин)
Крутящий момент двигателя постоянного тока выражается следующим математическим выражением.
T=K* ΦIa ———(2)
При пуске противоЭДС отсутствует, в результате чего ток якоря в 5-6 раз превышает номинальный ток полной нагрузки двигателя, следовательно, пусковой момент двигателя очень высока. Вот почему напряжение якоря увеличивают постепенно, чтобы ток якоря можно было ограничить безопасным рабочим диапазоном.
Пусковой момент двигателя постоянного тока с независимым возбуждением и двигателя постоянного тока с параллельным возбуждением меньше по сравнению с пусковым моментом последовательного двигателя постоянного тока, однако двигатель постоянного тока с независимым возбуждением и двигатель постоянного тока с независимым возбуждением лучше всего подходят для приложений, где регулирование скорости требуется.
Пусковой момент последовательного двигателя постоянного тока:
Пусковой момент последовательного двигателя постоянного тока выше пускового момента двигателя постоянного тока с независимым возбуждением. Двигатель используется для тяговой системы.
В двигателе постоянного тока обмотка возбуждения соединена последовательно с обмоткой якоря. Поскольку ток якоря протекает через обмотку возбуждения, поток, создаваемый в двигателе, очень велик.
T=K*ø*Ia
ø=K*Ia
T=K*I 2 a
Почему двигатель постоянного тока имеет высокий пусковой момент?
Крутящий момент двигателя постоянного тока пропорционален квадрату тока якоря. Вот почему двигатель серии постоянного тока имеет высокий пусковой момент. Двигатель серии постоянного тока обеспечивает самый высокий крутящий момент среди всех типов двигателей. Серийный двигатель постоянного тока создает высокий пусковой момент по сравнению с шунтирующим двигателем постоянного тока с независимым возбуждением и шунтирующим двигателем постоянного тока.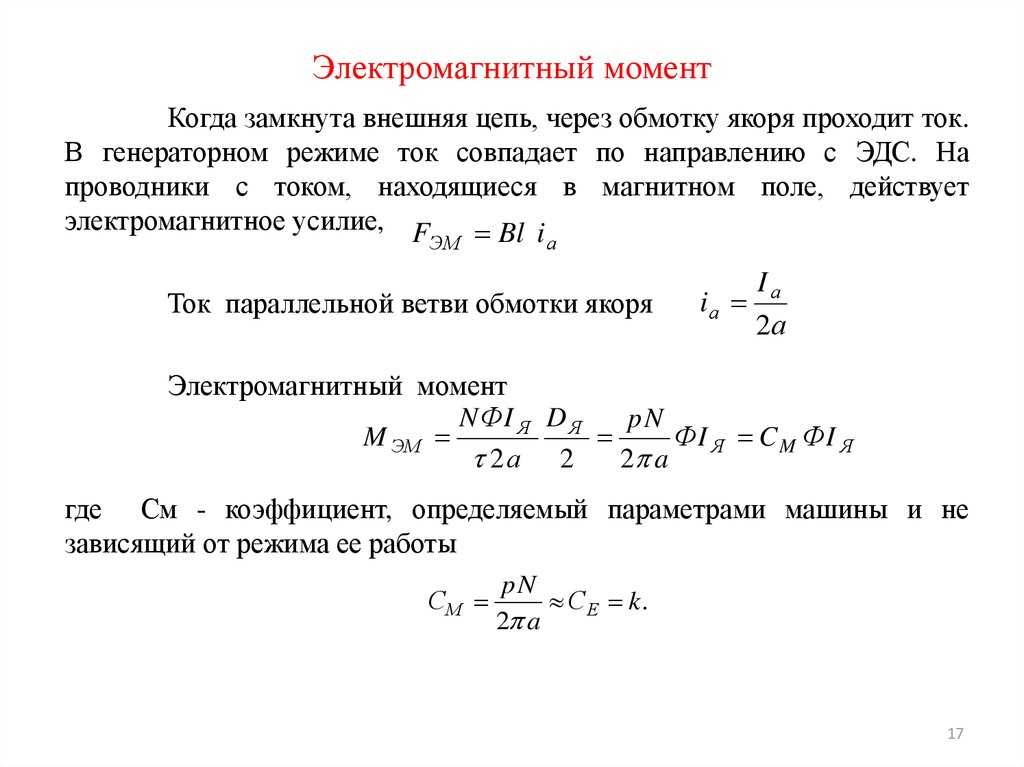
Двигатель постоянного тока используется для привода высокоинерционных нагрузок, требующих более высокого пускового момента,
Примерами применения с высоким пусковым крутящим моментом являются вращающаяся печь, ковшовый элеватор, железнодорожная тяга и т. д. Двигатель серии постоянного тока является лучшим двигателем с высоким пусковым крутящим моментом для управления высокоинерционными нагрузками. Вот почему двигатель постоянного тока используется для привода тяжелых грузов.
В отличие от двигателя постоянного тока, пусковой момент параллельного двигателя постоянного тока увеличивается линейно с током якоря.
Двигатель постоянного тока может развивать самый высокий крутящий момент среди всех типов двигателей постоянного тока; , однако, регулировка скорости двигателя постоянного тока неудовлетворительна. В приложениях, где требуется регулирование скорости, предпочтение отдается шунтирующему двигателю постоянного тока или шунтирующему двигателю постоянного тока с независимым возбуждением.
Еще одна особенность двигателей постоянного тока заключается в том, что их нельзя запускать без нагрузки. Двигатель может развивать чрезвычайно высокую скорость, если он работает без нагрузки. Ток возбуждения меньше, когда двигатель работает без нагрузки. Систему обнаружения скорости можно использовать для обнаружения превышения скорости двигателя, а сигнал обнаружения превышения скорости можно использовать для отключения привода постоянного тока.
Пусковой момент параллельного двигателя постоянного тока:
Шунтовой двигатель постоянного тока имеет обмотку возбуждения и обмотку якоря. Обмотка возбуждения включена параллельно обмотке якоря. Вот почему двигатель называется шунтирующим двигателем постоянного тока. Напряжение на обеих обмотках одинаковое.
Соединение обмотки возбуждения и обмотки якоря показано ниже.
Шунтирующий двигатель постоянного тока лучше всего подходит для приложений, где требуется регулирование скорости. Пусковой момент шунтового двигателя постоянного тока меньше по сравнению с пусковым моментом последовательного двигателя постоянного тока. Поток в двигателе остается постоянным, и двигатель обеспечивает постоянный крутящий момент.
Пусковой момент шунтового двигателя постоянного тока меньше по сравнению с пусковым моментом последовательного двигателя постоянного тока. Поток в двигателе остается постоянным, и двигатель обеспечивает постоянный крутящий момент.
Крутящий момент двигателя постоянного тока пропорционален магнитному потоку и току якоря. В шунтирующем двигателе постоянного тока поток постоянный, поэтому крутящий момент пропорционален току якоря.
T=K* ΦIa
T=K* Ia (Φ- постоянная)
График тока якоря и крутящего момента шунтового двигателя постоянного тока приведен ниже.
Похожие сообщения о двигателе постоянного тока:
1. Почему двигатель постоянного тока имеет высокий пусковой крутящий момент?
2. Шунтирующий двигатель постоянного тока: конструкция, регулирование скорости и характеристики
3. Двигатель постоянного тока или двигатель постоянного тока
4.
