

Содержание
Гидромеханическая коробка передач
Традиционное устройство автомобиля включает в себя в качестве обязательного элемента его конструкции такие узлы, как сцепление и КПП. Однако меняющийся стиль и образ современной жизни, с уклоном в сторону обеспечения все большего комфорта, приводит к изменению этих традиционных узлов машины. Им на смену зачастую приходит гидромеханическая трансмиссия.
Содержание
- Трансмиссия? А это что такое и зачем?
- Об устройстве гидромеханической коробки
- Про гидротрансформатор
- Про планетарную коробку
- Достоинства и недостатки гидромеханической коробки
Трансмиссия? А это что такое и зачем?
Для автомобиля трансмиссией будет всё, что обеспечивает поступление крутящего момента к колёсам от двигателя, в том числе КПП и сцепление. В классическом транспортом средстве это было именно так. Но, как уже отмечалось выше, в современных легковых автомобилях им на смену приходит АККП. В этом случае управление машиной значительно упрощается – не надо пользоваться сцеплением и переключать вручную КПП. Педаль сцепления просто-напросто отсутствует, а переключения выполняются автоматически.
Педаль сцепления просто-напросто отсутствует, а переключения выполняются автоматически.
Происходит это благодаря гидромеханической коробке передач. Чтобы понять, что это такое, лучше всего вспомнить о двух основных моментах, возникающих во время управления автомобилем:
- необходимости отключения от двигателя трансмиссии при переключении передач;
- изменении значения крутящего момента, передаваемого от мотора к колесам при изменении дорожных условий.
В обычной автомашине это происходит при нажатии на сцепление и переключении ручки коробки передач. Однако в машинах с АКПП подобное действие во многих случаях выполняет гидромеханическая коробка передач.
Об устройстве гидромеханической коробки
Говоря про устройство применяемой в составе легкового автомобиля гидромеханической коробки передач, надо отметить ее основные узлы:
- гидротрансформатор;
- управляющие механизмы;
- механическая коробка передач.
Про гидротрансформатор
Основой гидромеханического автомата является гидротрансформатор.
Фактически в гидромеханической АКПП он выполняет роль, аналогичную сцеплению в обычном автомобиле – передает момент от двигателя к коробке.
 Фактически в гидромеханической АКПП он выполняет роль, аналогичную сцеплению в обычном автомобиле – передает момент от двигателя к коробке.
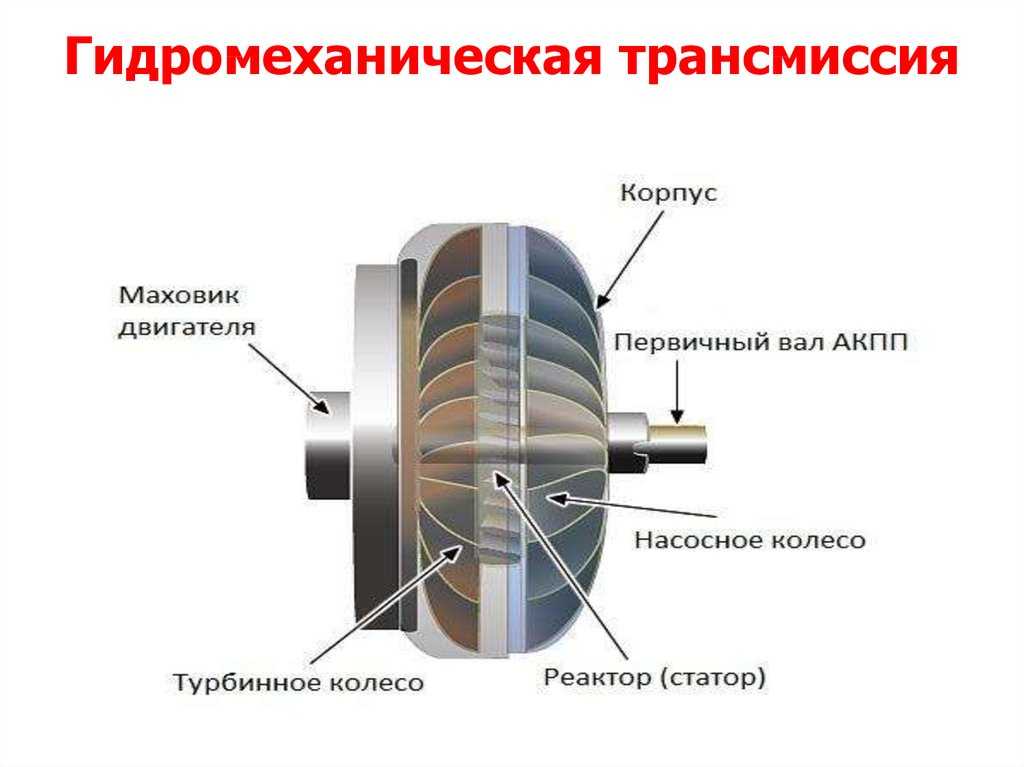
Фактически в гидромеханической АКПП он выполняет роль, аналогичную сцеплению в обычном автомобиле – передает момент от двигателя к коробке.Как видно из рисунка, устройство гидротрансформатора довольно простое и включает в себя три колеса специальной формы:
- насосное, осуществляющее связь между двигателем и гидротрансформатором;
- турбинное, выполняющее связь с валом (первичным) коробки передач;
- реакторное, предназначенное для усиления крутящего момента.
Все эти турбины закрыты специальным корпусом и на три четверти погружены в масло, заполняющее внутренний объем. Гидромеханический привод работает таким образом – насосное колесо, на которое поступает вращающий момент от двигателя, вращаясь, направляет на турбинное колесо поток масла, которое им раскручивается и предает усилие на вал коробки передач.
Происходит циркуляция масла по сложной траектории – с внешней части насосного кольца на внешнюю часть турбинного, а затем через центр устройства обратно к насосному. Следствием такого движения является гидромеханическая передача момента к коробке передач от мотора.
Следствием такого движения является гидромеханическая передача момента к коробке передач от мотора.
Такой гидромеханический привод обладает особенностью – из-за присутствия третьего, реакторного колеса, возможно усиление передаваемого момента. Происходит это благодаря его расположению в центре гидротрансформатора.
Когда осуществляется гидромеханическая передача момента, поток масла от турбинного колеса направляется к центру устройства и затем возвращается обратно к насосному. Однако на его пути расположено реакторное колесо, и поток, оказывая на него давление, вызывает с его стороны ответную реакцию, которая, воздействуя на турбину, усиливает момент, переданный от насосного колеса.
Такое дополнительное воздействие, возникающее, когда происходит гидромеханическая передача мощности от мотора, приводит к тому, что она увеличивается. Величина усиления зависит от разности скоростей межу колесами гидротрансформатора, чем она больше, тем более значительным оно будет. Это особенно полезно при начале движения, когда выполняется гидромеханическая передача мощности от двигателя, работающего на холостом ходу, к неподвижной трансмиссии.
Очень полезным фактом являет то, что гидравлический привод автоматически устанавливает нужное передаточное число между колесами и двигателем, благодаря изменению величины напора жидкости при ее передаче между напорным и турбинным дисками.
Однако диапазон такого изменения достаточно небольшой, и при этом отсутствует возможность, используя гидромеханический привод, разорвать связь между трансмиссией и мотором, поэтому гидротрансформатор работает последовательно с планетарной коробкой, позволяющей устранить отмеченные недостатки.
Про планетарную коробку
В гидромеханической АКПП чаще всего используется планетарный механизм, устройство которого понятно из приведённого ниже рисунка.
В самом простейшем варианте крутящий момент поступает на солнечную шестерню 6, с которой шестерни-сателлиты 3 находятся в постоянном зацеплении, они свободно вращаются на своих осях. На них установлено водило 4, соединенное с валом 5, сателлиты 3 постоянно находятся в зацеплении с шестерней 2, на внутренней поверхности которой имеются зубья.
Когда коронная шестерня 2 заторможена, момент через водило 4 поступает на ведомый вал, а когда шестерня расторможена, то сателлиты передают момент на нее, а ведомый вал остается неподвижным.
В АКПП используются фрикционные муфты сцепления и ленточные тормоза, а управление ими осуществляется с помощью гидромеханической системы, представляющей собой различные каналы, пружины и насос для создания давления масла.
В соответствии с приведенным описанием конструкцию гидромеханической коробки передач можно представить как последовательное соединение гидротрансформатора, коробки передач (обычно планетарной) с фрикционами, а также гидравлической системой управления.
Достоинством такой АКПП считаются:
- исключение ручного переключения передач;
- обеспечение передачи мощности без прерывания и рывков, особенно при начале движения.
Однако такая АКПП обладает и своими недостатками. Один из них – потеря крутящего момента, вызванная тем, что в состав автоматизированной коробки входит гидротрансформатор.
По данным проведенных замеров, эффективность подобной АКПП не превышает восьмидесяти шести процентов, тогда как у обычной механической коробки она составляет девяносто восемь процентов.
Гидромеханическая коробка позволяет освободить водителя от их переключения при движении автомашины, что особенно актуально для начинающих водителей, повысить безопасность движения и обеспечить при этом дополнительный комфорт.
Гидромеханические коробки передач.
Гидромеханическая передача является комбинированной, в которой наряду с гидротрансформатором применяется ступенчатая коробка передач. Обычно такую коробку передач сокращенно называют ГМП или ГМКП.
Гидротрансформатор, как и гидромуфта был изобретен немецким профессором Германом Феттингером в начале прошлого века. Прежде чем найти применение на автомобилях, эти гидродинамические передачи использовались в судостроении.
На автомобилях ГМП впервые появилась в США — в 1940 г. коробка Hydramatic была установлена на автомобилях Oldsmobile. В настоящее время в США гиромеханическими коробками передач оснащаются почти 90 % легковых автомобилей, а также все городские автобусы и значительная часть грузовых автомобилей.
В Европе массовое применение гидромеханических коробок передач началось только в начале семидесятых годов прошлого века, когда эти передачи нашли применение в автомобилях Mercedes-Benz, Opel, BMW.
Изменение режимов работы гидротрансформатора происходит автоматически. Если увеличивать нагрузку на выходе из гидротрансформатора, то происходит уменьшение угловой скорости турбины, что приводит к увеличению коэффициента трансформации.
К сожалению, гидротрансформатор имеет малый диапазон передаточных чисел, не обеспечивает движения задним ходом, не разобщает двигатель от трансмиссии (необходима сложная система опорожнения проточных частей от рабочей жидкости). Поэтому за гидро¬трансформатором устанавливают специальную коробку передач, которая компенсирует указанные недостатки. Такая гидромеханическая передача является бесступенчатой и позволяет получить любое передаточное число в заданном диапазоне.
Поэтому за гидро¬трансформатором устанавливают специальную коробку передач, которая компенсирует указанные недостатки. Такая гидромеханическая передача является бесступенчатой и позволяет получить любое передаточное число в заданном диапазоне.
В гидромеханических передачах в основном применяются механические планетарные коробки передач, которые легко поддаются автоматизации, но иногда используют и вальные ступенчатые коробки передач с автоматическим управлением.
Устройство и работа гидротрансформатора, а также его отличие от гидромуфты подробнее рассмотрено здесь.
В некоторых случаях гидротрансформатор устанавливается дополнительно к стандартному фрикционному сцеплению и ступенчатой коробке передач, при этом переключение передач происходит ручным способом.
В такой конструкции достаточно однодискового сцепления, так как оно служит только для отключения первичного вала коробки передач от турбинного колеса трансформатора при переключении передач, а плавность увеличения крутящего момента обеспечивает гидротрансформатор.
Достоинством такой передачи является относительная простота конструкции и управления по сравнению с автоматизированной передачей. Однако наиболее часто гидротрансформатор используется в сочетании двух- или трехступенчатой коробкой передач без стандартного фрикционного сцепления.
Коробки передач выполняются вальными или чаще планетарными. Управление переключением передач автоматическое или полуавтоматическое.
***
Двухступенчатая вальная коробка передач
Гидротрансформатор в сочетании с двухступенчатой вальной коробкой передач применяется в гидромеханической передаче автобуса ЛиАЗ-677М (рис. 1).
Она представляет собой редуктор с расположенными внутри него валами: первичным 3, вторичным 11 и промежуточным 15. Первичный вал связан с турбиной гидротрансформатора, а вторичный вал – с карданной передачей трансмиссии. Первая (понижающая) передача имеет передаточное число 1,79, а вторая передача – прямая, т.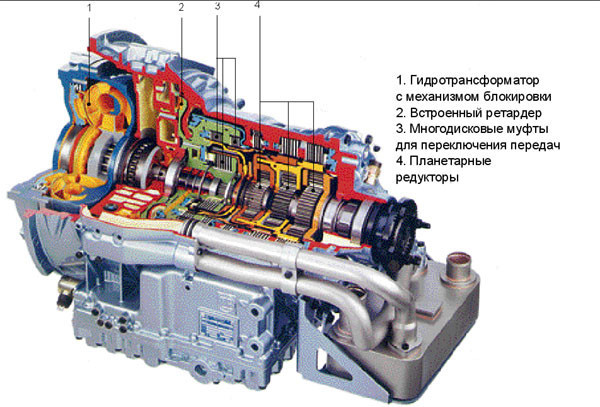 е. ее передаточное число равно единице.
е. ее передаточное число равно единице.
Особенностью такой коробки передач является то, что для включения передач наряду с зубчатой муфтой используются многодисковые муфты (фрикционы), работающие в масле.
Ведущие диски фрикционов – стальные, а ведомые – металлокерамические. Они устанавливаются на внутренних или наружных шлицах и имеют возможность незначительного перемещения в осевом направлении. В разъединенном положении пакет дисков удерживают пружины, сжимание дисков происходит от воздействия масла, подаваемого в цилиндр включения фрикциона.
При включении первой передачи срабатывает фрикцион 5, который блокирует зубчатое колесо 4 с первичным валом 3. Муфта 8 при этом смещается влево и блокирует зубчатое колесо 7 с вторичным валом 11.
Крутящий момент передается через зубчатое колесо 4 первичного вала, зубчатые колеса 16 и 14 промежуточного вала и зубчатое колесо 7 на вторичный вал 11. При включении второй передачи срабатывает фрикцион 6, который блокирует первичный вал 3 с вторичным валом 11. Муфта 8 устанавливается в нейтральное положение.
При включении второй передачи срабатывает фрикцион 6, который блокирует первичный вал 3 с вторичным валом 11. Муфта 8 устанавливается в нейтральное положение.
Для движения задним ходом муфта 8 перемещается в правое положение и блокирует зубчатое колесо 10 с вторичным валом 11, затем включается фрикцион 5. Крутящий момент передается через зубчатые колеса 4, 16, 13, 12, 10 на вторичный вал 11 коробки передач.
При включении фрикциона 2 происходит блокировка гидротрансформатора, когда турбинное и насосное колеса жестко соединяются друг с другом, и он переходит в режим гидромуфты.
***
Трехступенчатая планетарная коробка передач
В гидромеханических передачах наибольшее применение нашли планетарные коробки передач. Они обладают компактностью, пониженным уровнем шума при работе и длительным сроком службы. Переключение передач в них происходит практически без разрыва потока мощности.
Переключение передач в них происходит практически без разрыва потока мощности.
Основным звеном планетарной коробки передач является планетарный ряд (рис. 2), состоящий из эпициклического (коронного) зубчатого колеса 1, солнечного зубчатого колеса 2, водила 3 и сателлитов 4.
Оси сателлитов установлены на водиле и вращаются вместе с ним, т. е. они подвижны. В зависимости от того, какой элемент планетарного ряда является ведущим, а какой заторможен, происходит изменение передаточных чисел планетарного ряда.
Двухступенчатые коробки передач имеют один планетарный ряд. Многоступенчатые могут иметь два и более планетарных рядов, которые связаны друг с другом.
Торможение элементов планетарных рядов при переключении передач производится фрикционными муфтами (фрикционами) или ленточными тормозными механизмами.
Конструкция гидромеханической передачи легкового автомобиля, в которой гидротрансформатор сочетается с трехступенчатой планетарной коробкой передач представлена на рис. 3.
3.
Гидротрансформатор 1 состоит из трех колес с лопастями. Вал 2 турбинного колеса является ведущим валом коробки передач. Ведомый вал 12 коробки передач расположен соосно с ведущим валом. Коробка передач включает два одинаковых планетарных ряда 7 и 8, три многодисковых фрикциона 5, 6, 9 и два ленточных тормозных механизма 4, 10.
Переключение передач осуществляется включением фрикционов и тормозных механизмов в различных комбинациях (рис. 4).
В нейтральном положении включен тормозной механизм 10 (рис. 3) и сблокирована муфта 13 свободного хода. Ведомый вал 12 не вращается.
На первой передаче включены фрикцион 6 и тормозной механизм 10, а также включена муфта 13 свободного хода. Эпициклическое зубчатое колесо планетарного ряда 8 вращается с угловой скоростью ведущего вала 2, а солнечное зубчатое колесо заторможено, водило вращает эпициклическое зубчатое колесо планетарного ряда 7, в котором солнечное зубчатое колесо также заторможено. Ведомым является водило этого ряда, выполненное заодно с ведомым валом 12. Муфта свободного хода 13 включена.
Ведомым является водило этого ряда, выполненное заодно с ведомым валом 12. Муфта свободного хода 13 включена.
На второй передаче включены фрикцион 5 и тормозной механизм 10. Эпициклическое зубчатое колесо планетарного ряда 8 вращается свободно, а планетарного ряда 7 – с угловой скоростью ведущего вала 2.
Так как солнечное зубчатое колесо заторможено, то вращается водило и ведомый вал 12. Муфта свободного хода 13 включена.
На третьей передаче включены фрикционы 5 и 6, а также тормозной механизм 10. Эпициклическое зубчатое колесо и водило планетарного ряда 8 ведущие. С такой же угловой скоростью вращаются эпициклические зубчатые колеса и водило планетарного ряда 7, т. е. ведущий и ведомый валы вращаются с одинаковой частотой.
На передаче заднего хода включен фрикцион 6 и тормозной механизм 4. Водило планетарного ряда 8 заторможено, а эпициклическое зубчатое колесо ведущее.
Водило планетарного ряда 8 заторможено, а эпициклическое зубчатое колесо ведущее.
Солнечное зубчатое колесо вращается в обратном направлении, в этом же направлении вращается солнечное зубчатое колесо планетарного ряда 7. Так как эпициклическое зубчатое колесо планетарного ряда 7 заторможено, ведомым является водило, связанное с ведомым валом 12.
Муфта свободного хода 13 заблокирована.
***
Управление гидромеханической коробкой передач
Главная страница
- Страничка абитуриента
Дистанционное образование
- Группа ТО-81
- Группа М-81
- Группа ТО-71
Специальности
- Ветеринария
- Механизация сельского хозяйства
- Коммерция
- Техническое обслуживание и ремонт автотранспорта
Учебные дисциплины
- Инженерная графика
- МДК. 01.01. «Устройство автомобилей»
- Карта раздела
- Общее устройство автомобиля
- Автомобильный двигатель
- Трансмиссия автомобиля
- Рулевое управление
- Тормозная система
- Подвеска
- Колеса
- Кузов
- Электрооборудование автомобиля
- Основы теории автомобиля
- Основы технической диагностики
- Основы гидравлики и теплотехники
- Метрология и стандартизация
- Сельскохозяйственные машины
- Основы агрономии
- Перевозка опасных грузов
- Материаловедение
- Менеджмент
- Техническая механика
- Советы дипломнику
 01.01. «Устройство автомобилей»
01.01. «Устройство автомобилей»
Олимпиады и тесты
- «Инженерная графика»
- «Техническая механика»
- «Двигатель и его системы»
- «Шасси автомобиля»
- «Электрооборудование автомобиля»
Главная / Статьи / Устройство гидромеханической коробки передач ( АКПП)
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2023, РЕМОНТ АМЕРИКАНСКИХ АВТОМАТИЧЕСКИХ КОРОБОК ПЕРЕДАЧ И ДВИГАТЕЛЕЙ | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Работает на Сайт-Менеджере |
 Корпус
Корпус Ведущее, или насосное, колесо приводится двигателем. Ведомое, или турбинное, связано с нагрузкой. Механической связи внутри гидромуфты нет, но кинетическую энергию от насосного колеса к турбинному передает жидкость — отброшенная лопатками насоса, она попадает на лопатки турбины и тут же возвращается обратно. И несмотря на то, что крутящий момент на турбинном колесе почти равен моменту на насосном, они могут вращаться с разной частотой.
Ведущее, или насосное, колесо приводится двигателем. Ведомое, или турбинное, связано с нагрузкой. Механической связи внутри гидромуфты нет, но кинетическую энергию от насосного колеса к турбинному передает жидкость — отброшенная лопатками насоса, она попадает на лопатки турбины и тут же возвращается обратно. И несмотря на то, что крутящий момент на турбинном колесе почти равен моменту на насосном, они могут вращаться с разной частотой. Третье — так называемый реактор. Это неподвижное колесо, расположенное между турбиной и насосом. В самом начале разгона, когда насосное колесо вращается существенно быстрее турбинного, неподвижные лопатки реактора «подкручивают» поток масла, позволяя гидротрансформатору плавно и бесступенчато увеличивать крутящий момент на выходе. Естественно, сохраняя неизменными обороты и крутящий момент двигателя.
Третье — так называемый реактор. Это неподвижное колесо, расположенное между турбиной и насосом. В самом начале разгона, когда насосное колесо вращается существенно быстрее турбинного, неподвижные лопатки реактора «подкручивают» поток масла, позволяя гидротрансформатору плавно и бесступенчато увеличивать крутящий момент на выходе. Естественно, сохраняя неизменными обороты и крутящий момент двигателя.
 Передачи включаются по достижении определенной скорости, значение которой корректируется в зависимости от нагрузки на двигатель. То есть, чем сильнее мы давим на педаль газа, тем позже коробка включит следующую передачу, позволив двигателю раскрутиться до больших оборотов и развить большую мощность.
Передачи включаются по достижении определенной скорости, значение которой корректируется в зависимости от нагрузки на двигатель. То есть, чем сильнее мы давим на педаль газа, тем позже коробка включит следующую передачу, позволив двигателю раскрутиться до больших оборотов и развить большую мощность. Поэтому включение следующей передачи в «автоматах» обычно производится до того, как выключается предыдущая. Это называется перекрытием передач. Его величину подбирают такой, чтобы, с одной стороны, передачи включались достаточно плавно и без рывков, а с другой — чтобы слишком большое перекрытие не привело к повышенному износу фрикционов.
Поэтому включение следующей передачи в «автоматах» обычно производится до того, как выключается предыдущая. Это называется перекрытием передач. Его величину подбирают такой, чтобы, с одной стороны, передачи включались достаточно плавно и без рывков, а с другой — чтобы слишком большое перекрытие не привело к повышенному износу фрикционов. А первенцем фирмы ZF, сегодняшнего законодателя «трансмиссионной» моды, стала автоматическая коробка модели 3НР-12 — которая копировала по конструкции одну из трансмиссий фирмы Borg-Warner. Коробка ZF собственной разработки появилась несколькими годами позже — это была поистине эпохальная модель 3НР-22, некоторые черты которой несут и самые современные трансмиссии фирмы.
А первенцем фирмы ZF, сегодняшнего законодателя «трансмиссионной» моды, стала автоматическая коробка модели 3НР-12 — которая копировала по конструкции одну из трансмиссий фирмы Borg-Warner. Коробка ZF собственной разработки появилась несколькими годами позже — это была поистине эпохальная модель 3НР-22, некоторые черты которой несут и самые современные трансмиссии фирмы. (Ряд Равинье более компактен и позволяет получить четыре передачи, но не столь надежен, как ряд Симпсона.)
(Ряд Равинье более компактен и позволяет получить четыре передачи, но не столь надежен, как ряд Симпсона.)
 И многое, как и прежде, зависит от тщательного подбора настроек системы управления, динамики процесса переключения, а также тщательного согласования их с характеристикой двигателя. Именно от этого в первую очередь зависит «характер» трансмиссии и всего автомобиля. Скажем, многие автомобили BMW и Audi имеют одинаковые на «железном» уровне коробки одной и той же фирмы ZF, но как же по-разному они работают!
И многое, как и прежде, зависит от тщательного подбора настроек системы управления, динамики процесса переключения, а также тщательного согласования их с характеристикой двигателя. Именно от этого в первую очередь зависит «характер» трансмиссии и всего автомобиля. Скажем, многие автомобили BMW и Audi имеют одинаковые на «железном» уровне коробки одной и той же фирмы ZF, но как же по-разному они работают! Когда масло, отработав свое на лопатках турбины (ведомое колесо), попадает обратно на насосное колесо, на пути оно встречает неподвижные лопатки реактора, которые отбрасывают поток на лопатки насосного колеса уже под другим углом. «Полезная энергия» потока растет — а с ней и крутящий момент. Но рост сопротивления потоку вызывает увеличение гидравлических потерь. Поэтому с ростом скорости автомобиля (а значит, и частоты вращения турбинного колеса) колесо реактора растормаживается, и гидротрансформатор переходит в режим гидромуфты.
Когда масло, отработав свое на лопатках турбины (ведомое колесо), попадает обратно на насосное колесо, на пути оно встречает неподвижные лопатки реактора, которые отбрасывают поток на лопатки насосного колеса уже под другим углом. «Полезная энергия» потока растет — а с ней и крутящий момент. Но рост сопротивления потоку вызывает увеличение гидравлических потерь. Поэтому с ростом скорости автомобиля (а значит, и частоты вращения турбинного колеса) колесо реактора растормаживается, и гидротрансформатор переходит в режим гидромуфты. Когда солнечная шестерня заторможена (например, тормозом — на корпус коробки), водило вращается медленнее «короны», а крутящий момент на нем оказывается больше приложенного к «короне»
Когда солнечная шестерня заторможена (например, тормозом — на корпус коробки), водило вращается медленнее «короны», а крутящий момент на нем оказывается больше приложенного к «короне»что такое гидромеханическая коробка передач (АКПП), гидроавтомат, привод, гмкп, трансмиссия, принцип работы и устройство
В автомобилестроении используют разные виды автоматов, но наиболее востребованы классические ГМП – трансмиссионные агрегаты с гидромеханическими передачами. Но в чем же особенности конструкции и применения этих механизмов, что привело к такой их популярности?
Содержание
Что такое гидромеханическая коробка передач
Чтобы оценить преимущества трансмиссии гидромеханического типа нужно представлять, что это такое, исходя из назначения и принципа действия.
Коробка с ГМП – сложный механизм, в котором совмещены функции сцепления с переключением скоростей. Это передаточное звено привода обеспечивает автоматический выбор необходимого передаточного отношения, исходя из текущих условий движения, без непосредственного участия водителя, в рамках установленного режима.
Гидромеханическая коробка передач
Принцип работы и устройство ГМП
Принцип работы классической гидромеханической коробки передач в чем-то и схож с механической трансмиссией, но есть и отличия из-за особенностей устройства ГМП. При управлении автомобилем с МКПП водитель вынужден совершать несколько последовательных манипуляций:
- Рассоединять двигатель с трансмиссией, выжимая педаль сцепления.
- Переводить ручкой переключения скоростей коробку в нужную позицию по передаточному отношению.
- Отпускать сцепление, возвращая связь мотора с трансмиссией.
Эти действия повторяют, если нужно включить другую скорость.
В автомате водитель устанавливает режим движения вперед при выжатой педали тормоза, а после освобождения тормозного устройства автомат с ГМП самостоятельно переключает передачи, не отсоединяя двигатель от привода, учитывая особенности устройства АКПП.
МКПП
Гидрокоробка состоит из 6 узлов:
- Гидротрансформатор. Заменяет сцепление, связывая двигатель с трансмиссией.
- Пакет фрикционов с дисками, тормозными лентами. Обеспечивает включение нужной передачи при разных сочетаниях этих устройств.
- Планетарный ряд. Передает вращение на последующий привод.
- Маслонасос. Создает необходимое давление трансмиссионной жидкости в системе ГМП.
- Гидроблок. Распределяет масло по каналам для включения определенных скоростей.
- Электронный блок управления. Командует ГМП, с учетом текущих условий движения.
Гидроавтомат может работать в 4 режимах:
- Драйв – для движения вперед.
- Реверс – обратный ход.
- Паркинг – для постановки машины на стоянку.
- Нейтраль – отсоединяет коробку от мотора.
Режимы ГМП
В некоторых моделях конструкторами реализованы режимы Спортивный, Овердрайв и другие, с возможностью включения пониженных или повышенных передач, имитацией ручного переключения и другими функциями.
Современные гидромеханические АКПП: разновидности и особенности
Гидромеханическая коробка – сложный механизм. Каждая конкретная модель автомата с ГМП рассчитана на определенные условия эксплуатации и характеристики автомобильной техники.
Виды автоматических трансмиссий:
- многовальные;
- двухвальные;
- трехвальные;
- с планетарным редуктором.
Системы с несколькими валами более востребованы для грузовой автомобильной техники и автобусов, с использованием в конструкции:
- многодисковых муфт, которые работают в масляной ванне;
- зубчатой муфты для включения первой скорости и реверсного режима.
Эти коробки совмещают в себе несколько параллельных и совмещенных механизмов, где за четные передачи отвечает один ряд, за нечетные второй. В работе находится первый узел, пока в это время включается нужная скорость на втором.
В работе находится первый узел, пока в это время включается нужная скорость на втором.
Легковые машины чаще оснащают автоматами ГМП планетарного типа. Эти механизмы компактны, обеспечивают плавную работу даже при длительном сроке эксплуатации.
АКПП
31.82%
ГМП
40.91%
МКПП
27.27%
Поделюсь мнением в комментариях
0%
Проголосовало: 22
Функции и устройство гидротрансформатора
В автоматической коробке с ГМП гидротрансформатор заменяет сцепление. Он связывает мотор с трансмиссией, исключая прямой кинематический контакт между узлами. Такой принцип действия обеспечивает плавность работы, сглаживая динамические нагрузки, избавляет от отсоединения механизма от мотора для включения нужной скорости.
Гидротрансформатор получил неофициальное название бублика за характерную тороидальную форму корпуса, с которым соединен маховик, установленный на валу мотора. Маслонасос с лопатками внутри корпуса при вращении нагнетает поток масла, вращающий реакторное колесо, а через него – турбину, передающую момент на входной вал коробки передач с ГМП.
Дополнительно гидротрансформатор обеспечивает некоторое изменение передаточного отношения, с учетом напора трансмиссионной жидкости.
Функции и устройство гидротрансформатора
Планетарная коробка передач
Планетарная передача передает вращение на фрикционные муфты. Применяют разные варианты конструкции этого редуктора. Основа самого простого механизма – центральная солнечная шестерня, пребывающая в зацеплении с сателлитами (вспомогательными зубчатыми колесами). Коронная шестерня передает вращение ведомому валу, воспринимающему усилие.
Переключают скорости фрикционные пакеты. Диски покрыты специальным составом, обеспечивающим сцепление разных элементов.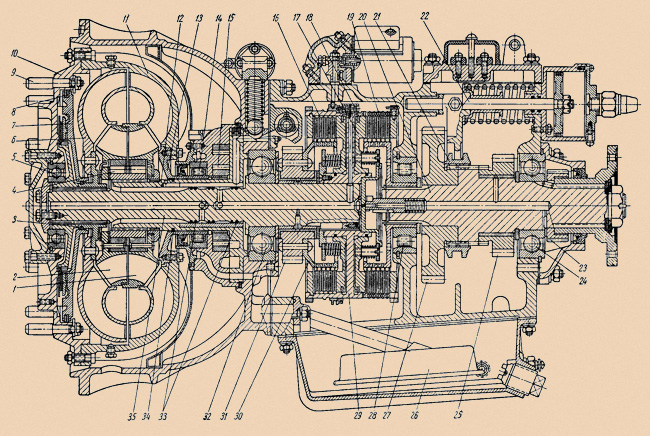 Детали сдавливает гидравлический поршень, срабатывающий от давления трансмиссионной жидкости, распределяемой гидроблоком.
Детали сдавливает гидравлический поршень, срабатывающий от давления трансмиссионной жидкости, распределяемой гидроблоком.
При отключении напора, пружина разжимает пакет, выключая передачу. Также конструкция включает тормозные устройства для сцепления и передачи вращающего момента.
Планетарная коробка передачФрикционы и диски
ЭБУ – электронный блок управления АКПП
Управляет трансмиссией с ГМП электроника. Электронный блок подает команды для срабатывания соответствующих электромагнитных клапанов гидроблока (соленоидов). При управлении коробкой автоматика получает исходные данные из датчиков, регистрирующих обороты, нагрузку на трансмиссионный механизм и другие параметры.
ЭБУ программируют, используя программное обеспечение с соответствующими настройками работы трансмиссионного агрегата.
Преимущества гидромеханического автомата:
простота управления;
плавность переключения передач;
высокий КПД;
надежность, продолжительный ресурс механизма.
Но гидромеханическая трансмиссия имеет и недостатки. Чтобы продлить срок службы автомата с ГМП, для стабильной работы устройства необходимо регулярно менять трансмиссионную жидкость и масляный фильтр, проводя операции по техническому обслуживанию с периодичностью, установленной регламентом изготовителя.
Гидромеханический автомат, при всем удобстве управления и надежности, приводит к увеличению расхода топлива, по сравнению с механикой, особенно при езде в условиях города, с частыми остановками на светофорах. А ремонт АКПП может вылиться в крупную сумму, ввиду высокой стоимости запчастей.
Автоматическая трансмиссия с ГМП за время применения доказала надежность и практичность, что объясняет ее популярность и активное применение в своих ТС разными автопроизводителями. А если владелец обеспечит надлежащий уход, по сроку службы коробка не уступит ресурсу двигателя.
А если владелец обеспечит надлежащий уход, по сроку службы коробка не уступит ресурсу двигателя.
Сохраните статью в закладках, чтобы не потерять полезную информацию.
Гидромеханическая коробка передач: принцип работы и устройство
Несмотря на растущую популярность автомобилей с автоматической коробкой передач, классическая механика по-прежнему в почете у многих водителей. Она надежнее, чем АКПП. Но при эксплуатации водитель постоянно вынужден работать с педалью сцепления. Это доставляет некие неудобства, особенно в пробке. Так появилась гидромеханическая коробка передач. Принцип работы ее и устройство рассмотрим в нашей сегодняшней статье.
Характеристика
Те водители, которые не хотят работать со сцеплением, отдают предпочтение именно этой трансмиссии. Гидромеханическая коробка передач выполняет сразу несколько функций. Она совмещает в себе сцепление и классическую коробку.
Переключение передач здесь производится автоматически либо полуавтоматически. Таким же образом устроена и гидромеханическая коробка передач погрузчика. Во время движения водитель не задействует педаль-сцепление. Все, что нужно – это акселератор и тормоз.
Таким же образом устроена и гидромеханическая коробка передач погрузчика. Во время движения водитель не задействует педаль-сцепление. Все, что нужно – это акселератор и тормоз.
О конструкции
Устройство гидромеханической коробки передач предполагает наличие гидравлического трансформатора. Данный элемент, в зависимости от конструктивных особенностей, может быть двух-, трех- и многовальным. Сейчас производителями применяется планетарная автоматическая гидромеханическая коробка передач.
Как работает вальная КПП
На грузовых автомобилях и крупных автобусах чаще всего используется многовальная трансмиссия. Для того чтобы переключить передачу, здесь используются многодисковые муфты. Для их работы необходима смазка. Масло гидромеханической коробки передач значительно отличается по консистенции от «механики». В последнем случае оно более густое. Для того чтобы включить первую и заднюю скорость на гидромеханике, используются зубчатые муфты. Такая конструкция позволяет максимально плавно передавать крутящий момент от маховика на колеса.
Планетарные
Сейчас это более распространенная гидромеханическая коробка передач.
Ее стали использовать благодаря ее компактным размерам и легкому весу. Еще одно преимущество планетарной трансмиссии – это большой срок службы и отсутствие шумов при работе. Но есть у такой коробки и недостатки. Из-за конструктивных особенностей такая трансмиссия более дорогая в производстве. Также она имеет низкий коэффициент полезного действия.
Как работает планетарная КПП
Ее алгоритм работы предельно прост. Переключение скоростей на планетарной гидромеханической трансмиссии производится при помощи фрикционных муфт. Также для сглаживания ударов при переключении на пониженную, применяют специальную тормозную ленту. Именно при работе «тормоза» снижается сила передачи крутящего момента. Но при этом переключение скоростей более плавное, нежели у вальных аналогов.
В основе планетарной трансмиссии лежит гидравлический трансформатор. Данный элемент расположен между двигателем и КПП. ГДФ состоит из нескольких составляющих:
ГДФ состоит из нескольких составляющих:
- Колесо редуктора.
- Насос.
- Турбина.
В народе данный элемент называют «бубликом» из-за его характерной формы.
Когда двигатель работает, крыльчатка насоса вращается вместе с маховиком. Смазка проникает внутрь насоса и дальше под воздействием центробежной силы начинает вращать турбину. Масло из последнего элемента проникает в реактор, который выполняет функцию сглаживания ударов и толчков, а также передает крутящий момент. Циркуляция масла осуществляется по замкнутому кругу. Мощность автомобиля возрастает при вращении турбинного колеса. Максимальный крутящий момент передается при движении машины с места. При этом реактор находится в неподвижном состоянии – его держит муфта. Когда автомобиль набирает скорость, обороты турбины и насоса увеличиваются. Муфта расклинивается и реактор вращается с нарастающей скоростью. Когда обороты последнего элемента будут максимальными, гидротрансформатор перейдет в состояние работы муфты. Так он будет вращаться с такой же скоростью, что и маховик.
Так он будет вращаться с такой же скоростью, что и маховик.
Особенности конструкции планетарной КПП
Планетарная гидромеханическая коробка передач состоит из ведущего вала, на котором находится сочлененная шестерня. Также здесь имеются сателлиты, вращающиеся на отдельных осях. Данные элементы вводятся в зацепление с внутренними зубьями коробки и коронной шестерней. Передача крутящего момента осуществляется благодаря действию тормозной ленты. Она затормаживает коронную шестерню. По мере разгона автомобиля, их обороты растут. Задействуется ведомый вал, который воспринимает передачу крутящего момента от ведущего.
Как ГТФ устанавливает нужное передаточное число? Это действие производится автоматически. Когда скорость вращения колеса автомобиля растет, возрастает напор масла, который идет от насоса в турбину. Таким образом, крутящий момент на последней увеличивается. Соответственно, обороты колеса и скорость движения машины тоже растут.
О КПД
Что касается коэффициента полезного действия, он на порядок ниже, чем на вальных КПП.
Максимальное его значение составляет от 0.82 до 0.95. Но при средних оборотах двигателя, данный коэффициент не превышает отметки в 0.75. Эта цифра растет с увеличением нагрузки на гидротрансформатор.
Обслуживание и ремонт гидромеханической коробки передач
При эксплуатации данной трансмиссии, необходимо следить за уровнем масла. Данная жидкость здесь является рабочей. Именно масло задействует турбины для передачи крутящего момента. На механических же коробках оно просто смазывает трущиеся шестерни. Производители рекомендуют производить замену масла на гидромеханических коробках каждые 60 тысяч километров. Стоит отметить, что в конструкции такой КПП имеется свой фильтр. Он тоже меняется при достижении данного срока. Эксплуатация на низком уровне масла грозит пробуксовкой и перегревом трансмиссии.
Что касается ремонта, чаще всего выходит из строя гидравлический трансформатор. Признак неисправности – невозможность включения одной из передач, увеличенное время «срабатывания» нужной скорости.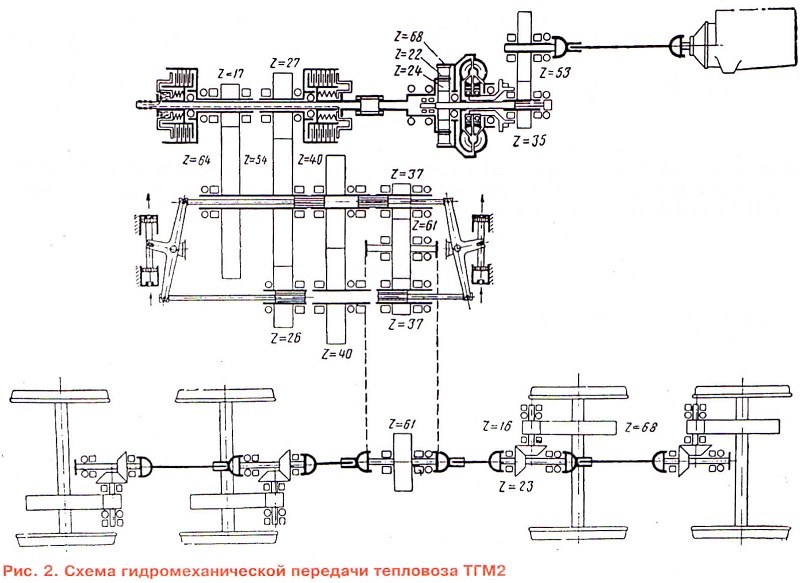 Также в этом случае разбирается и чистится сетка-маслозаборник и меняется клапан золотникового типа. Если имеются течи, необходимо проверить момент затяжки болтов и состояние уплотнительных элементов. Во время эксплуатации на фильтре образуется металлическая стружка. Она забивает механизм и уровень давления масла падает. При повышенных нагрузках ресурс данного очистительного элемента снижается. В таком случае его рекомендуют менять раз в 40 тысяч километров.
Также в этом случае разбирается и чистится сетка-маслозаборник и меняется клапан золотникового типа. Если имеются течи, необходимо проверить момент затяжки болтов и состояние уплотнительных элементов. Во время эксплуатации на фильтре образуется металлическая стружка. Она забивает механизм и уровень давления масла падает. При повышенных нагрузках ресурс данного очистительного элемента снижается. В таком случае его рекомендуют менять раз в 40 тысяч километров.
Как продлить ресурс
Чтобы увеличить срок эксплуатации гидромеханической коробки, необходимо следить за уровнем масла. При его недостаточном количестве возникает перегрев коробки. Рабочая температура не должна превышать 90 градусов. Современные автомобили оснащаются датчиком давления масла. Его загорелась контрольная лампа, не стоит игнорировать ее. В дальнейшем это может спровоцировать поломку гидротрансформатора.
Также не следует переключать передачи без выжима педали тормоза. Коробка примет на себя весь удар, особенно если переключиться с первой на заднюю без предварительного оттормаживания. На ходу, если это затяжной спуск, не рекомендуется включать «нейтралку». Это также существенно снижает ресурс гидравлического трансформатора и рабочих муфт. В остальном же необходимо придерживаться регламента замены масла и фильтров. Срок эксплуатации данной КПП составляет порядка 350 тысяч километров.
На ходу, если это затяжной спуск, не рекомендуется включать «нейтралку». Это также существенно снижает ресурс гидравлического трансформатора и рабочих муфт. В остальном же необходимо придерживаться регламента замены масла и фильтров. Срок эксплуатации данной КПП составляет порядка 350 тысяч километров.
Заключение
Итак, мы выяснили, что собой представляет гидромеханическая коробка передач. Как видите, при должном обслуживании она будет такой же надежной, как механическая. При этом водителю не придется постоянно выжимать сцепление.
Что такое гидромеханическая коробка передач и как она работает
Содержание
Сцепление и коробка переключения передач – это традиционные узлы любого отечественного или зарубежного автомобиля. Трансмиссия является элементом, обеспечивающим поступление крутящего момента от силового агрегата к колесам. Если раньше большинство транспортных средств оснащались механической коробкой, то сегодня все больше автолюбителей отдают предпочтение гидромеханической АКПП. Отчасти это связано с тем, что управление машиной упрощается, поскольку педаль сцепление отсутствует, а переключение скоростей происходит автоматическим образом.
Отчасти это связано с тем, что управление машиной упрощается, поскольку педаль сцепление отсутствует, а переключение скоростей происходит автоматическим образом.
Назначение комбинированной трансмиссии легкового авто
Образ жизни современных водителей существенно меняется и сегодня все больше требований предъявляются к созданию оптимальных комфортных условий во время вождения. Стандартные узлы автомобилей терпят существенные изменения, среди ярких примеров можно выделить комбинирование механической и гидравлической КП. Если говорить о гидромеханической трансмиссии и что это такое, первым делом стоит понять, в чем ее предназначение. Главное отличие заключается в плавном изменении вращающего движения. Облегченное управление позволило отказаться от использования сцепления, поскольку комбинированная КП отвечает за все процессы. При АКПП можно говорить о следующих ситуациях, касающихся управления авто:
- Во время переключения скоростей трансмиссия отключается от силового агрегата.
- Если дорожные условия меняются, величина вращающего момента также будет менять свое значение.

Использование АКПП на авто позволяет получить несколько неоспоримых преимущества. Помимо автоматизации переключения скоростей стоит отметить также повышение эксплуатационных характеристик силового агрегата и коробки и улучшение проходимости транспортного средства в условиях бездорожья.
Гидравлическая коробка автомат
Разновидности гидромеханики
Коробки автомат долгое время устанавливались исключительно на автомобили среднего класса и категории премиум. На сегодняшний день агрегат получил массовое использование и пользуется у автолюбителей все большей популярностью. АКПП способны значительно повысить комфорт во время вождения, но стоит учесть, что такие узлы отличаются по разновидностям, каждая из которых имеет свои преимущества и недостатки. Разобравшись в принципе работы гидромеханических коробках передачи, можно будет определиться с выбором, какой тип АКПП подходит конкретному водителю.![]() Стоит упомянуть о следующих типах гидромеханических КП:
Стоит упомянуть о следующих типах гидромеханических КП:
- Гидромеханический автомат. Это одна из первых трансмиссий подобного рода, которая появилась как альтернатива «механике». Конструкция представляет собой комбинацию гидротрансформатора и планетарной КП. Наличие электронных компонентов позволяют значительно повысить функциональные особенности агрегата.
- Вариаторная трансмиссия. Пользуется меньшей популярностью из-за того, что отсутствуют привычные фиксированные ступени. К преимуществам можно отнести максимальную плавность хода, а объясняется это как раз отсутствием смены передачей. Конструкция бесступенчатой трансмиссии выглядит следующим образом: для передачи крутящего используется привычный гидравлический преобразователь, а изменение крутящего момента происходит за счет изменения диаметра ведущего и ведомого шкива. Данные компоненты соединяются при помощи ремня и цепи, а изменение диаметра будет зависеть от скорости и нагрузки.
- Роботизированная коробка. Массово начала использоваться около 20 лет назад. От механики отличий немного, имеется сцепление, но разница заключается в том, управление работой сцепления происходит в автоматическом режиме. К преимуществам «робота» можно отнести невысокую стоимость, динамичный разгон и экономию топлива. Что касается недостатков, главным является снижение уровня комфорта.
- Преселективные коробки с двойным сцеплением. К таким относятся устройства DSG или Powershift. Агрегат можно отнести к роботизированным КП, но с более высокими техническими характеристиками. По конструкции напоминает привычную механику, но в этот раз инженеры использовали сразу два агрегата, помещенные в одну коробку.
 От механики отличий немного, имеется сцепление, но разница заключается в том, управление работой сцепления происходит в автоматическом режиме. К преимуществам «робота» можно отнести невысокую стоимость, динамичный разгон и экономию топлива. Что касается недостатков, главным является снижение уровня комфорта.
От механики отличий немного, имеется сцепление, но разница заключается в том, управление работой сцепления происходит в автоматическом режиме. К преимуществам «робота» можно отнести невысокую стоимость, динамичный разгон и экономию топлива. Что касается недостатков, главным является снижение уровня комфорта.Роботизированные агрегаты и АКПП – это устройства, цель которых заключается в упрощении взаимодействия водителя с трансмиссией.
Функции гидротрансформатора
Гидравлический трансформатор, по сути, являет собой усовершенствованную гидромуфту. Обычная муфта выполняет задачу простого вращения, то в случае АКПП добавляется увеличение крутящего положения. Агрегат выполняет несколько основных функций, одной из которых является демпфирующее действие во время вращательного движения. При постоянной разнице скорости вращения возникают потери, поэтому происходит блокировка, в результате которой вращающий момент начинает передаваться через демпфирующие пружины. Блокировочная муфта выполняет еще одну полезную функцию, предотвращение повышения расхода топлива. Говоря о функциях гидромеханической трансмиссии автомобиля, стоит отметить и некоторые негативные факторы.
Обычная муфта выполняет задачу простого вращения, то в случае АКПП добавляется увеличение крутящего положения. Агрегат выполняет несколько основных функций, одной из которых является демпфирующее действие во время вращательного движения. При постоянной разнице скорости вращения возникают потери, поэтому происходит блокировка, в результате которой вращающий момент начинает передаваться через демпфирующие пружины. Блокировочная муфта выполняет еще одну полезную функцию, предотвращение повышения расхода топлива. Говоря о функциях гидромеханической трансмиссии автомобиля, стоит отметить и некоторые негативные факторы.
Важно! При блокировке нередко наблюдается повышенное давление на важные компоненты мотора и трансмиссии. Фрикционные компоненты могут изнашиваться быстрей, а в масло могут попадать частицы, образовавшиеся в результате трения. В результате ходовые характеристики могут ухудшиться, а смена передачи перестанет быть плавной. Автовладельцам необходимо беречь коробку во время разгона или торможения.
Устройство гидротрансформатора
О том, что представляет устройство гидромеханической передачи, можно понять, изучив ее конструкцию. Главным узлами являются гидротрансформатор, механическая КП и механизмы управления. Гидротрансформатор – это главный компонент, а выполняет он практически ту же функцию, что и сцепление. Изучив конструкцию данной детали, можно заметить, что она состоит из трех колес, имеющих специальную форму. Первое колесо – насосное, его назначение выполнять связь между гидравлическим узлом и силовым агрегатом. Второе кольцо – турбинное, оно образует связь с первичным валом коробки. Третье колесо – реакторное, его функция состоит в усилении крутящего момента. Все три компонента закрыты посредством специального корпуса, внутренний объем которого на три четверти заполнен смазочным материалом. От двигателя крутящий момент поступает на насосную часть, затем посредством вращательных движений направляет на турбинное колесо смазочный материал, в результате чего усилие передается на первичный вал. По мере нагрузки гидротрансформатор в автоматическом режиме будет менять момент силы, который в свою очередь, передаваясь к механическим узлам, будет переключаться посредством фрикционных компонентов. Напор жидкости, проходящий от напорного диска к турбине, регулируется также в автоматическом режиме.
По мере нагрузки гидротрансформатор в автоматическом режиме будет менять момент силы, который в свою очередь, передаваясь к механическим узлам, будет переключаться посредством фрикционных компонентов. Напор жидкости, проходящий от напорного диска к турбине, регулируется также в автоматическом режиме.
Устройство гидротрансформатора
Планетарная коробка передач
В автомате обычно используется планетарная коробка. Несмотря на ее простое устройство, крутящий момент регулируется нужным образом и направляется к солнечной шестерне. С планетарным механизмом сцеплены шестерни-сателлиты свободного вращения, на которых предусмотрено специальное водило для связи с валом. Крутящий момент будет передаваться через водило в случае нахождения шестерни в заторможенном режиме, а если шестерня будет расторможено, то сателлиты начнут отправлять крутящий момент на нее. О том, как работает гидромеханическая коробка передач можно понять, изучив ее конструкцию. Планетарная КП является одной из разновидностей комбинированной системы.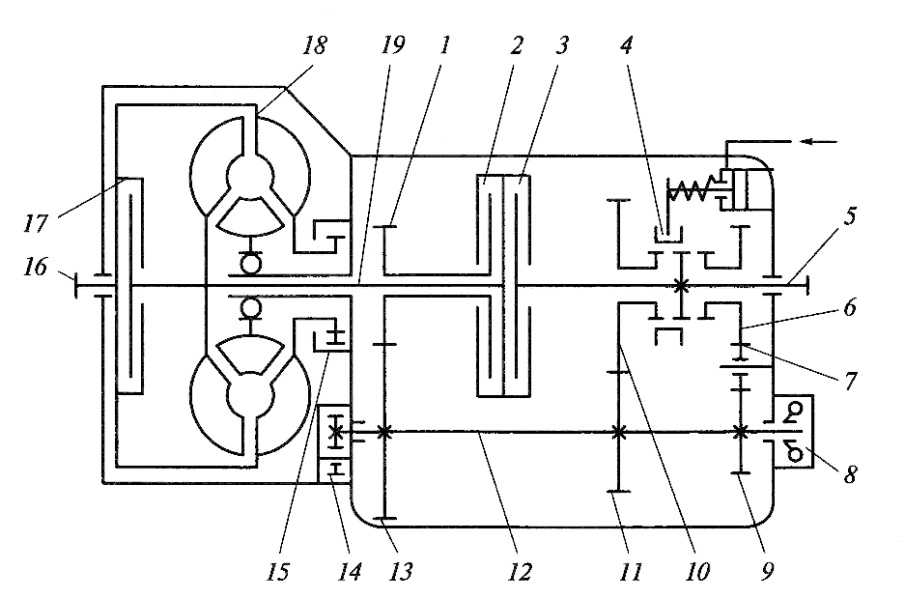 Название узла связано с тем, что сателлиты вращаются вокруг центральной шестерни подобно планетам солнечной системы. Применение данных компонентов в автомате обусловлено простотой модификации передаточного отношения. Для этого достаточно притормозить одну из деталей узла или соединить несколько элементов посредством фрикционной муфты.
Название узла связано с тем, что сателлиты вращаются вокруг центральной шестерни подобно планетам солнечной системы. Применение данных компонентов в автомате обусловлено простотой модификации передаточного отношения. Для этого достаточно притормозить одну из деталей узла или соединить несколько элементов посредством фрикционной муфты.
Электронная часть гидромеханической АКПП
Современные автоматические коробки оснащаются электронным управлением, что позволяет выдерживать заданные моменты с более высокой точностью. Если в более старых устройствах речь шла о значении в 6-8%, то КП с электронным управлением выдерживают точность в 1%. Появились новые возможности, исходя из скорости и нагрузки на мотор, компьютер может определить массу транспортного средства и ввести необходимые поправки. Главными компонентами электронной системы управления являются рычаг управления и электронный блок. В данную систему также входят и определенные подсистемы, такие как:
- Подсистема ручного управления.
- Система, вырабатывающая управляемые сигналы.
- Элементы функционирования.
- Автоматическая защита.
- Измерительные узлы.
- Исполнительная система.
Внешний вид роботизированной КП
Плюсы и минусы гидромеханики
Автомобили, оснащенные АКПП, обеспечивают более безопасное и комфортное вождение, поскольку предоставляют возможность сконцентрироваться на дороге, не отвлекаясь на лишние действия. Особое преимущество получают начинающие водители, которым трудно использовать механику.
Важно! Если в автошколе ученик проходит обучение на авто с АКПП, он не сможет управлять транспортным средством с механической КП, так как в водительском удостоверении будет соответствующая пометка.
К преимуществам автоматизированной коробки можно отнести следующее:
- Передачи не нужно переключать вручную;
- Выполняется равномерная подача мощности. Авто, оснащенные АКПП, отличаются плавным ходом во время переключения скоростей.
- В случае с механической КП могут возникнуть трудности с троганием, при резком опускании сцепления двигатель может заглохнуть. В транспортных средствах с «автоматом» данный процесс контролируется электронными компонентами.

У коробки-автомат имеются и свои недостатки, главный из которых – это дороговизна обслуживания. Стоит отметить и высокие требования к условиям эксплуатации. Еще одним минусом является отсутствие возможности завести авто с «толкача», при севшем аккумуляторе.
Гидромеханика – это выбор тех автовладельцев, которые не стеснены в финансовых средствах и не готовы пожертвовать своим комфортом. При грамотном управлении и уходе машина с «автоматом» более надежна и безопасна в управлении.
Комплексное управление гидромеханическими вариаторными трансмиссиями
На этой странице
РезюмеВведениеВыводыБлагодарностиСсылкиАвторское правоСтатьи по теме
Гидромеханическая вариаторная трансмиссия (ГМТ) имеет преимущества непрерывного изменения и высокой эффективности. Так что это одна из идеальных трансмиссий тяжелых автомобилей. Процесс непрерывного изменения скорости включает регулирование скорости в диапазоне и смещение диапазона. В данной статье предлагается комплексная стратегия управления ГМТ. Разработан алгоритм асимметричной насыщенной стратегии управления скоростью с инкрементально-пропорционально-интегральной производной (ПИД) в условиях диапазона и смещения диапазона. И в этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. Модель контроллера построена в Matlab Simulink и совместно смоделирована с моделью транспортного средства, оснащенного двухдиапазонным HMT. Создан прототип HMT-платформы аппаратного моделирования (HILS) интегрированной стратегии управления. Результаты HILS показывают, что процесс переключения диапазонов происходит плавно, и колебаний скорости не происходит. На этапе стабильной работы дроссельной заслонки скорость двигателя регулируется до почти оптимальной скорости, и правила ее изменения соответствуют результатам моделирования.
Так что это одна из идеальных трансмиссий тяжелых автомобилей. Процесс непрерывного изменения скорости включает регулирование скорости в диапазоне и смещение диапазона. В данной статье предлагается комплексная стратегия управления ГМТ. Разработан алгоритм асимметричной насыщенной стратегии управления скоростью с инкрементально-пропорционально-интегральной производной (ПИД) в условиях диапазона и смещения диапазона. И в этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. Модель контроллера построена в Matlab Simulink и совместно смоделирована с моделью транспортного средства, оснащенного двухдиапазонным HMT. Создан прототип HMT-платформы аппаратного моделирования (HILS) интегрированной стратегии управления. Результаты HILS показывают, что процесс переключения диапазонов происходит плавно, и колебаний скорости не происходит. На этапе стабильной работы дроссельной заслонки скорость двигателя регулируется до почти оптимальной скорости, и правила ее изменения соответствуют результатам моделирования. Стратегия комплексного контроля является разумной.
Стратегия комплексного контроля является разумной.
1. Введение
С развитием автомобильной промышленности клиенты предъявляют все более высокие требования к комфорту и топливной экономичности. Передачи важны для удовлетворения требований [1, 2].
Основы и характеристики соотношения скоростей HMT показаны на рисунке 1. Входная мощность делится на две части: гидравлическая мощность и механическая мощность в блоке разделения мощности. Гидравлическая трансмиссия состоит из гидравлического насоса переменной производительности и двигателя постоянной производительности. Изменяя рабочий объем насоса, скорость двигателя постоянно изменяется между минимальной (отрицательной) и максимальной (положительной) скоростью, которая определяется как ход. Каждый ход соответствует рабочему режиму механической трансмиссии, который определяется как диапазон. Наконец, два потока мощности сходятся в непрерывно изменяющемся потоке мощности в конфлюксном блоке.
HMT — новая бесступенчатая трансмиссия.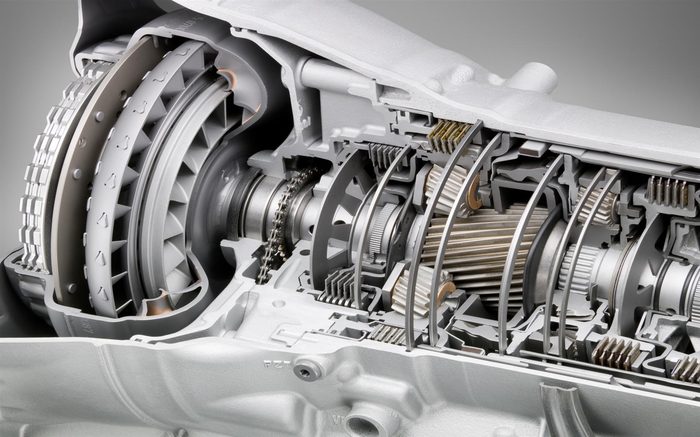 Это заставляет двигатель работать в высокоэффективной области, поэтому он имеет преимущество высокой эффективности. И он мог передавать большую нагрузку, чем ременная бесступенчатая трансмиссия (CVT). Следовательно, ГМТ является одной из идеальных трансмиссий для большегрузных автомобилей [3]. И он успешно применялся к большегрузным автомобилям [4–6].
Это заставляет двигатель работать в высокоэффективной области, поэтому он имеет преимущество высокой эффективности. И он мог передавать большую нагрузку, чем ременная бесступенчатая трансмиссия (CVT). Следовательно, ГМТ является одной из идеальных трансмиссий для большегрузных автомобилей [3]. И он успешно применялся к большегрузным автомобилям [4–6].
На основе многочисленных исследований по проектированию и моделированию HMT был разработан ряд методов проектирования и анализа. Линарес и др. [5] объяснил основы всех типов трансмиссии CVT и описал конструктивные параметры и основы системы разделения мощности. Macor и Rossetti [7] оптимизировали конструкцию HMT и получили хорошую сходимость по скорости и высокий средний КПД. Для разработки системы управления ГМП Чжан и Чжо [8] построили модель ГМП, используя принцип динамики. Чой и др. [9] провел тренажёр трактора с ГМТ, в режимах работы и движения. И скорость трактора, и скорость двигателя могли поддерживаться на желаемых значениях.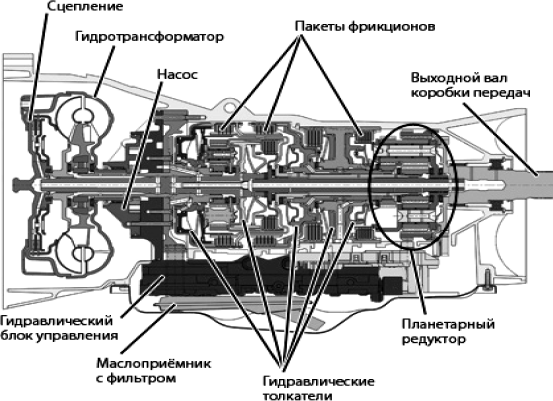 По сравнению с технологиями проектирования и анализа HMT управление HMT все еще находится на ранней стадии разработки.
По сравнению с технологиями проектирования и анализа HMT управление HMT все еще находится на ранней стадии разработки.
Процесс изменения скорости состоит из регулирования скорости в диапазоне и переключения диапазона. Следовательно, необходима скорость, управляющая диапазоном, время переключения диапазона и методы переключения. Много исследований было посвящено управлению скоростью в компонентах дальности и управления. Юань и др. [10] и Wei et al. [11] разработали ПИД-регулятор с переменным параметром и исследовали систему регулирования скорости на ГМТ. В их исследованиях может быть реализовано отслеживание целевого соотношения скоростей. Но их исследования были сосредоточены только на управлении соотношением скоростей в диапазоне. Ху и др. [12] исследовали возможность переключения без отключения питания. Zhang и Zhuo [13] представили метод изменения скорости и смещения диапазона для достижения самого широкого диапазона скоростей и предотвращения повторного переключения. Савареси и др. [14] разработали систему управления, включающую сервоуправление на клапане, сервоуправление на гидравлическом соотношении скоростей и синхронизатор. Но улучшение характеристик трактора было достигнуто только заменой датчика тока/двигателя и датчиков скорости. Танелли и др. [15] разработали систему управления для трактора, оснащенного ГМТ, включающую управление переключением диапазона одного и двух фрикционов, а также улучшенное качество переключения. В статье представлен комплексный метод управления ГМТ. Модель контроллера построена в Matlab Simulink и смоделирована с моделью транспортного средства, оснащенного HMT. Проведен тест HILS HMT.
2. Стратегия комплексного управления HMT
Двухдиапазонный HMT показан на рисунке 2 и приведен для иллюстрации метода управления. Двухдиапазонный HMT включает в себя три планетарных ряда (, и ), два тормоза (), один насос переменной производительности () и один двигатель постоянной производительности (). На рисунке 2 это входная скорость HMT, а выходная скорость HMT. При включении и отпускании тормоза работает планетарная передача, а ГМТ работает в гидравлическом диапазоне (). При включенном и отпущенном тормозах включается и работает планетарная передача, а ГМД работает в гидромеханическом диапазоне (ГМ).
Скоростные характеристики HMT состоят из нескольких связанных бесступенчатых диапазонов. Следовательно, интегрированная стратегия управления должна включать управление скоростью в диапазоне, логику переключения диапазона, условия переключения диапазона и стратегии управления переключением.
Скорость HMT регулируется на основе скорости автомобиля и открытия дроссельной заслонки. HMT заставляет двигатель и транспортное средство работать по-разному в соответствии с выбранным режимом для достижения ожидаемой производительности.
3. Стратегия контроля скорости в диапазоне
Стратегия управления скоростью в диапазоне изменяет управляющий ток гидравлического насоса в соответствии с разницей между частотой вращения двигателя и идеальной скоростью. Стратегия управления скоростью в диапазоне изучалась в течение многих лет, в основном в ПИД-регулировании, управлении слежением за соотношением скоростей и т. д. [10–13].
При определенных дорожных условиях ускорение автомобиля с ГМТ ограничивается крутящим моментом двигателя и максимальным крутящим моментом двигателя. Максимальный крутящий момент двигателя определяется максимальным давлением при условии выбора двигателя.
Когда расхождение между фактической скоростью двигателя и заданной скоростью больше во время ускорения автомобиля, градиент изменения тока управления насосом с переменным рабочим объемом увеличивается в соответствии с алгоритмом ПИД. А градиент скорости вращения двигателя и сопротивление ускорению транспортного средства увеличиваются, что приводит к тому, что гидравлический блок теряет способность ускорять транспортное средство после повышения давления до максимального давления. Поэтому, когда транспортное средство ускоряется, необходимо установить верхний предел насыщения. Когда транспортное средство быстро замедляется, передаточное отношение HMT должно иметь возможность быстро уменьшаться. Таким образом, нижний предел насыщения при замедлении транспортного средства должен быть больше, чем при ускорении транспортного средства. То есть пределы насыщения асимметричны. В этой статье предлагается асимметричная стратегия управления скоростью ПИД-регулятора с приращением насыщения для HMT в диапазоне, и выводятся общие алгоритмы для каждого диапазона.
3.1. Универсальный инкрементный ПИД-алгоритм
HMT-регулятор относится к цифровому блоку ПИД-регулятора, и его приращение означает приращение при и означает ошибку при ; , , и – коэффициенты соответственно, где , , ; относится к масштабному коэффициенту и относится к интегральному коэффициенту, ; относится к производному фактору, ; означает производную постоянную времени, означает интегральную постоянную времени и означает период дискретизации.
Результатгде сумма ).
3.2. Стратегия инкрементного ПИД-управления скоростью с асимметричным насыщением в диапазоне
Уравнение (2) может быть выражено следующим образом, если и заменить током накачки и приращением :где «» определяется рабочими диапазонами HMT. В диапазонах прямой пропорциональности, если передаточное число берется со знаком плюс; если нет, то берется минус. В обратнопропорциональных диапазонах, если передаточное число берется со знаком минус; если нет, то берется плюс. В двухдиапазонном HMT диапазон H является диапазоном прямой пропорциональности. В своем положительном полудиапазоне первый «±» в (4) принимает знак плюс. А в отрицательном полудиапазоне вторая принимает знак минус. Диапазон HM является обратно пропорциональным диапазоном. Точно так же первое «±» в (4) принимает знак минус, а второе — знак плюс. относится к току накачки при . и – верхний и нижний пределы тока накачки. В двухдиапазонном HMT используется гидравлический насос переменной производительности Sauer Danfoss Series 9.0 аксиально-поршневой насос, где и мА (предназначен для устранения нулевой мертвой зоны механизма регулирования объема). и представляют собой асимметричные насыщенные верхний и нижний пределы градиента управляющего тока, которые зависят от рабочего объема насоса/двигателя, передаточного числа, сопротивления транспортного средства и т. д.
На рис. 2 выходная скорость HMT является функцией скорости двигателя. И подходящие параметры ПИД-регулятора , и в (5) для каждого диапазона должны быть выбраны путем большого количества симуляций и экспериментов, чтобы уменьшить колебания скорости двигателя. В результате теоретических расчетов и моделирования параметры ПИД-регулятора следующие: , , в диапазоне, , , в диапазоне HM, мА и мА.
4. Логика переключения диапазонов
Логика переключения диапазонов — это порядок диапазонов. Чтобы реализовать бесступенчатую трансмиссию, элементы переключения диапазона HMT, такие как тормоза, должны управляться последовательно, а HMT может работать в последовательном диапазоне. Логика сдвига диапазона двухдиапазонной HMT показана в таблице 1.
5. Условия сдвига диапазона
Сдвиг диапазона относится к процессу перехода между двумя соседними диапазонами. Чтобы улучшить качество переключения, условия переключения следующие: (1) Конечная выходная скорость HMT в текущем диапазоне должна быть равна скорости исходной точки целевого диапазона. В каждом диапазоне применяется управление с обратной связью для управления скоростью двигателя. Идеальное время переключения достигается в зависимости от частоты вращения двигателя и частоты вращения двигателя. Целевая скорость двигателя возникает в идеальной точке переключения, когда скорости ведущего и ведомого дисков целевого тормоза равны. В двухдиапазонном ГМТ выводится идеальная скорость от Н-диапазона до НМ-диапазона: где , , и – число зубьев шестерни от входного вала до , соответственно; , , и являются характеристическими параметрами трех планетарных передач. (2) Отклонение частоты вращения двигателя (абсолютное значение) должно быть больше минимального установленного значения. Во избежание повторения переключения необходимо установить минимальное отклонение частоты вращения двигателя. Только когда отклонение частоты вращения двигателя больше, чем было бы разрешено переключение диапазона. (3) Должно быть выполнено условие переключения водителем на более высокую передачу. В зависимости от дорожной ситуации водитель выбирает более высокий диапазон с помощью селектора диапазона, чтобы ограничить скорость автомобиля. Переключение на более высокий диапазон будет выполняться только тогда, когда селектор диапазонов разрешает повышение передачи.
Подводя итог, условия переключения на более высокую передачу из диапазона H в диапазон HM:
Условия перехода на пониженную передачу из диапазона HM в диапазон, где — установленное значение селектора диапазона. Если , выходная скорость HMT равна 0; если , HMT может работать только в диапазоне; и когда HMT может работать в диапазоне HM. — минимальное отклонение частоты вращения двигателя.
6. Стратегии переключения диапазона
В процессе переключения диапазона отпускается тормоз текущего диапазона и включается тормоз целевого диапазона. Последовательность переключения тормозов определяется логикой переключения диапазонов, а время начала переключения диапазонов определяется условиями переключения диапазонов.
Направление вращения двигателя постоянно во время переключения диапазона. Но изменение направления крутящего момента двигателя приводит к обмену контурами высокого и низкого давления. Между тем, поток мощности гидравлической системы меняется на противоположный. Скорость двигателя колеблется из-за резкого изменения давления и объемного КПД гидравлического блока. При этом резко изменяются скоростные характеристики ГМТ, а также изменяются силовые характеристики, что приводит к шуму и вибрации.
Именно стратегии переключения диапазонов отвечают за идеальное включение и выключение тормозов, чтобы сократить время переключения и удары, а также свести к минимуму колебания входной и выходной скорости [10]. Стратегии смещения диапазона относятся к параметрам управления и их управляющим сигналам, включая изменение, время начала и время окончания. Стратегии переключения диапазона в этой работе включают следующее: (1) Время перекрытия между двумя тормозами. относится к времени начала включения встречного тормоза и относится к времени начала отпускания трогательного тормоза. Время перекрытия между тормозами равно (2) масляному буферу во время отпускания тормоза. На него влияют время начала, время окончания, максимальная ширина импульса и изменение ширины импульса сигнала пропорционального предохранительного клапана. (3) Регулировка рабочего объема насоса. Он определяется временем начала, временем окончания и изменением тока смещения.
Приведенные выше время начала и время окончания являются временными приращениями относительно времени начала переключения диапазонов.
Время и изменение управляющих переменных стратегий переключения диапазонов должны быть определены путем моделирования и экспериментов и связаны со следующими факторами: (1) Схема механической трансмиссии. Из-за совпадения зубьев в конструкции механической трансмиссии фактическое передаточное отношение каждого диапазона не может быть равно идеальному передаточному отношению HMT, которое тесно связано с изменением тока смещения. (2) Характеристики отклика и объемный КПД закрытого гидравлический контур. Изменение тока смещения может быть достигнуто только при смещении диапазона и может вызвать воздействие, если его синхронизация неверна. То есть ток смещения может изменяться после отключения тормоза отключения. Его начальное время больше нуля, а конечное время связано с характеристиками отклика замкнутого гидравлического контура. На изменение тока смещения влияет объемный КПД замкнутого гидравлического контура. (3) Параметры тормоза. На время перекрытия влияет диаметр гидравлического цилиндра и ход встречного и встречного тормозов. На процесс изменения ширины импульса и максимальную ширину импульса пропорционального предохранительного клапана влияют коэффициент крутящего момента фрикционной пластины, жесткость и начальное смещение возвратной пружины в отпускающем тормозе. Диаметр и длина гидравлического контура управления тормозом также влияют на управляющие сигналы.
Хотя стратегии переключения диапазона различны для разных схем HMT, существует несколько универсальных правил: Диапазон H положителен (2), , и определяются временем запаздывания механизма управления гидронасосом переменной производительности и временем наполнения тормоза маслом. Если , то . Если , то и . Если , то и ; немного меньше, чем .(3) Минимальное давление масла буфера давления масла должно быть больше, чем минимальное давление масла для перемещения поршня тормоза.
По результатам моделирования стратегии переключения диапазона из диапазона в диапазон HM следующие: , , и ; мА; , как показано на рис. 3. Сигналы управления от диапазона HM к диапазону такие же, как повышение передачи по значению и времени, за исключением мА.
7. Моделирование стратегий управления
В соответствии со стратегиями управления модель контроллера построена в Matlab Simulink (рис. 4) и совместно смоделирована с моделью автомобиля, оснащенного двухдиапазонным ГМТ. Модель автомобиля построена в программе MSC Easy5 [16]. Результаты показаны на рис. 5.9.0003
Когда коэффициент сопротивления качению равен 0,02, открытие дроссельной заслонки показано на рис. 5(а). Сигналы управления и скорости показаны на рисунках 5(b), 5(c) и 5(d).
Перед открытием дроссельной заслонки двигателя (до ), тормоз включен, а другой выключен. Двигатель работает на холостом ходу, HMT находится в нейтральном диапазоне, автомобиль припаркован. При открытии дроссельной заслонки () сигнал управления начинает увеличиваться, HMT изменяется на диапазон, и автомобиль трогается с места.
В момент , условия переключения диапазона HMT удовлетворяются от диапазона к диапазону HM, и контроллер начинает выполнять стратегии переключения диапазона (показаны на рисунке 3). Во время переключения диапазона () сигнал торможения уменьшается, а сигнал торможения постепенно увеличивается. Ток смещения уменьшается на 14 мА (), а скорость вращения двигателя незначительно колеблется. После смены диапазона HMT переходит в диапазон HM. При уменьшении рабочего объема гидронасоса автомобиль разгоняется в отрицательном полудиапазоне ГМ. В момент времени ГМП переходит нулевую точку в область положительной половины ГМ, в которой перемещение равно нулю. В диапазоне положительной половины ГМ при обратном увеличении рабочего объема гидронасоса автомобиль разгоняется.
При уменьшении дроссельной заслонки и уменьшении целевой скорости двигателя ток смещения увеличивается в обратном направлении до тех пор, пока фактическая скорость двигателя не станет ниже заданной скорости. В это время скорость автомобиля начинает снижаться. В момент , дроссельная заслонка двигателя закрывается, целевая скорость двигателя изменяется, и ток смещения сильно изменяется. В момент HMT возвращается к диапазону положительной половины HM, и транспортное средство непрерывно замедляется. В момент времени ГМТ переходит в режим сдвига диапазона из диапазона НМ в диапазон Н, управляющий сигнал тормоза постепенно уменьшается с увеличением управляющего сигнала тормоза. Ток смещения увеличивается на 14 мА (), частота вращения двигателя также немного колеблется, а HMT переходит в H-диапазон. В момент HMT возвращается в нейтральный диапазон.
На рис. 5 ток управления гидравлическим насосом не колеблется в диапазоне. Нет повторяющейся смены. Двигатель падает до оборотов холостого хода после того, как HMT возвращается в нейтральное положение.
Идеальная и фактическая скорость двигателя показаны на рисунке 5(c). Запуск корабля занимает 1,2 с (от 5 с до 6,2 с). После запуска транспортного средства, очевидно, больше, чем . От s, по мере увеличения нагрузки на двигатель, быстро падает до значения, немного превышающего . После этого держится близко к , а максимальная разница составляет 44 об/мин (за исключением нулевых точек гидронасоса и переключения диапазонов). падает до менее , после закрытия дроссельной заслонки. быстро снижается до . Из-за инерционности автомобиля фактическая частота вращения двигателя сохраняется некоторое время (около 10,1 с) с регулировкой ГМТ. Когда скорость автомобиля приблизительно равна нулю, двигатель быстро падает до оборотов холостого хода.
Скорость автомобиля показана на рисунке 5(d). При трогании с места, разгоне, торможении и остановке колебаний скорости не происходит ни при переключении диапазонов, ни в нулевых точках.
8. Моделирование оборудования в цикле
АПМ ГМТ представляет собой метод испытаний, основанный на системе компьютерного моделирования. В тесте HILS объект HMT заменяет модель HMT в схеме моделирования. И он напрямую контролируется контроллером через устройства ввода/вывода и интерфейсную схему.
Благодаря тому, что объект HMT подключен к схеме моделирования, этот тест может дополнительно подтвердить надежность результатов моделирования. Этот метод может проверить правильность стратегии управления на основе компьютерного моделирования HMT и точно настроить параметры управления. Он также может проверить правильность модели моделирования HMT. Это особенно эффективно для использования модели серого ящика для описания HMT, которое трудно описать с помощью математической модели.
На основе испытательного стенда динамического моделирования мощностью 330 кВт исходные объекты нагрузки приводят в движение и нагружают HMT в соответствии с динамическими характеристиками двигателя и транспортного средства с помощью модели вождения в реальном времени. В этой системе HMT является материальным объектом, а все остальные части являются моделями или управляются моделями. Система АПМ показана на рис. 6. А некоторые объекты теста АПМ показаны на рис. 7.
Программное обеспечение HILS для HMT состоит из модели контроллера HMT, модели двигателя, моделей автомобиля в реальном времени и целевого окна в реальном времени. Под управлением модели двигателя в реальном времени компонент нагрузки 2 испытательного стенда динамического моделирования, который работает в соответствии с характеристиками двигателя, обеспечивает питание для HMT. Под управлением модели транспортного средства в реальном времени компонент нагрузки 1 загружает HMT в соответствии с характеристиками движения транспортного средства. Модель контроллера осуществляет управление HMT в реальном времени в соответствии со стратегиями управления. HMT регулирует передаточное отношение в соответствии с изменением условий работы автомобиля, благодаря чему двигатель работает примерно на оптимальной скорости (наилучшая экономия топлива или наилучшая производительность).
Ввод модели двигателя в реальном времени — это крутящий момент нагрузки, а выход — частота вращения двигателя. На стенде динамического моделирования составляющая нагрузки 2, имитирующая двигатель, находится под управлением режима постоянной скорости. Детектор скорости и крутящего момента 2 передает крутящий момент нагрузки обратно в компьютер моделирования. Результат расчета модели двигателя в реальном времени передается компоненту нагрузки 2.
Модель двигателя в реальном времени может быть описана следующим образом: где – инерция моделируемого двигателя, – статический выходной крутящий момент моделируемого двигателя, – момент нагрузки по обратной связи. датчика момента скорости, – выходная скорость компонента нагрузки 2, – управляющее напряжение контроллера компонента нагрузки 2, – коэффициент линейного преобразования управляющего напряжения компонента нагрузки 2.
В модели компьютерного моделирования входными и выходными данными модели транспортного средства являются выходная скорость и крутящий момент нагрузки HMT соответственно. На стенде динамического моделирования компонент нагрузки 1, имитирующий транспортное средство, находится под управлением режима постоянного крутящего момента. Чтобы гарантировать, что ввод и вывод согласуются с расчетами в имитационной модели, необходимо ввести «виртуальную ось» в модель транспортного средства в реальном времени.
Выходной крутящий момент модели транспортного средства в реальном времени где — жесткость на кручение виртуальной оси, — демпфирование виртуальной оси, — выходной крутящий момент модели транспортного средства в реальном времени, — сигнал скорости обратной связи датчика скорости, – угловая скорость эквивалентной инерции транспортного средства, – управляющее напряжение контроллера компонента нагрузки 1, – коэффициент линейного преобразования управляющего напряжения компонента нагрузки 1,
Под нагрузкой компонент 1, работающий без нагрузки в ручном режиме управления, результаты теста переключения диапазонов HMT показаны на рис. 8. Из рисунков видно, что процесс переключения диапазонов происходит плавно и колебаний скорости не происходит. Это показывает, что стратегия управления сдвигом диапазона, определяемая скоростью двигателя, является разумной. Когда нагрузка увеличивается, выходная скорость явно колеблется в процессе переключения диапазона. В нем говорится, что необходимы стратегии управления переключением диапазона.
При автоматическом управлении компонентами нагрузки 1 и 2 кривая дроссельной заслонки двигателя показана на рис. 9(а), а ответы HMT показаны на рисунке 9 (б). Основные показатели эффективности показаны на рисунках 9(c) и 9(d). Из рисунка 9 видно, что при изменении дроссельной заслонки двигателя соотношение скоростей HMT изменяется под управлением модели контроллера. На этапе стабильной работы дроссельной заслонки скорость двигателя регулируется до почти оптимальной скорости, и правила ее изменения соответствуют результатам моделирования. Благодаря регулировке характеристик двигателя и инерции автомобиля двигатель может работать на максимальной скорости в течение длительного времени.
9. Выводы
(1) Предложена комплексная стратегия управления HMT. Разработан алгоритм асимметричного насыщенного инкрементального ПИД-регулирования скорости в условиях диапазона и смещения диапазона. И в этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. (2) Модель контроллера построена в Matlab Simulink и совместно смоделирована с моделью транспортного средства, оснащенного двухдиапазонным HMT. Результаты моделирования показывают, что под управлением предложенных стратегий скорость двигателя близка к идеальной, а транспортное средство соответствует требованиям вождения при изменении дроссельной заслонки. (3) Проведен тест HILS HMT. Результаты испытаний показывают, что процесс переключения передач происходит плавно, а скачков скорости не происходит. На этапе стабильной работы дроссельной заслонки скорость двигателя регулируется до почти оптимальной скорости, и правила ее изменения соответствуют результатам моделирования. (4) Результаты демонстрируют, что модель HMT верна, а стратегия управления разумна. Система АПМ работает надежно и соответствует требованиям исследования динамических характеристик ГМТ.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Эта работа поддерживается Национальным фондом естественных наук Китая (грант № 51175449) и Программой научных исследований высшего образования провинции Хэбэй (грант № Z2015081).
Справочные материалы
М. Кулкарни, Т. Шим и Ю. Чжан, «Динамика переключения и управление коробкой передач с двойным сцеплением», Механизм и теория машин , том. 42, нет. 2, стр. 168–182, 2007 г.
Посмотреть по адресу:
Сайт издателя | ученый Google | Zentralblatt MATH
PD Walker, N. Zhang и R. Tamba, «Управление переключением передач в силовых агрегатах с двойным сцеплением», Mechanical Systems and Signal Processing , vol.
25, нет. 6, стр. 1923–1936, 2011.Посмотреть по адресу:
Сайт издателя | Google Scholar
Х. Айцетмюллер, «Steyr S-Matic — будущая система CVT», в Proceedings of the FISITA World Automotive Congress , Сеул, Республика Корея, июнь 2000 г.
См. по адресу:
Google Scholar
R. P. Northup, Отдел разработки и испытаний HMPT-506, General Ordnance Systems,
- Electric, Pittsfield, Mass, USA, 1974.
P. Linares, V. Méndez, and H. Catalán, «Расчетные параметры бесступенчатой трансмиссии с разделением мощности с использованием планетарных передач с 3 активными валами», Journal of Terramechanics , том. 47, нет. 5, стр. 323–335, 2010.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р.
Кумар, М. Ивантысынова и К. Уильямс, «Исследование энергетических характеристик раздельных приводов для шоссейных грузовиков и колесных погрузчиков», SAE Technical Papers 2007-01-4193, 2007.Посмотреть по адресу:
Google Scholar
А. Макор и А. Россетти, «Оптимизация гидромеханических трансмиссий с разделением мощности», Механизм и теория машин , том. 46, нет. 12, стр. 1901–1919, 2011.
Посмотреть по адресу:
Сайт издателя | Google Scholar
М. Чжан и З. Чжоу, «Моделирование и моделирование управления для многодиапазонной гидромеханической вариаторной трансмиссии», Key Engineering Materials , vol. 621, стр. 462–469, 2014.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С.
Х. Чой, Х. Дж. Ким, С. Х. Ан и др., «Моделирование и симуляция трактора с гидромеханической трансмиссией», стр. 9.0135 Journal of Biosystems Engineering , vol. 38, нет. 3, стр. 171–179, 2013 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Юань, Г. Хоу и Б. Чжан, «ПИД-управление с переменным параметром для гидромеханической бесступенчатой трансмиссии», Китайский журнал машиностроения , том. 40, нет. 7, pp. 81–84, 2004.
Посмотреть по адресу:
Google Scholar
C. Wei, S. Yuan, J. Hu, and W. Song, «Theoretical and Experimental Study of Speed Ratio Follow- система управления на гидромеханической передаче геометрического типа», Журнал машиностроения , вып. 47, нет. 16, стр. 101–105, 2011.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж.
Ху, К. Вэй, С. Юань и К. Цзин, «Характеристики гидромеханической трансмиссии в процессе переключения под нагрузкой», Китайский журнал машиностроения , том. 22, нет. 1, стр. 50–56, 2009 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
М. Чжан и З. Чжоу, «График управления изменением скорости и переключением диапазона многодиапазонного гидромеханического вариатора для сельскохозяйственных тракторов», в Материалы Международной конференции IEEE по мехатронике и автоматизации (ICMA ’06) , том. 2006, стр. 1970–1974, июнь 2006 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Савареси С. М., Тарони Ф. Л., Превиди Ф. и Биттанти С., «Проектирование системы управления вариатором с разделением мощности для мощных сельскохозяйственных тракторов», IEEE/ASME Transactions on Mechatronics , vol.
9, нет. 3, стр. 569–579, 2004.Посмотреть по адресу:
Сайт издателя | Академия Google
М. Танелли, Г. Панцани, С. М. Саварези и К. Пирола, «Управление трансмиссией для сельскохозяйственных тракторов с переключением под нагрузкой: конструкция и автоматическая настройка в конце линии», Мехатроника , том. 21, нет. 1, стр. 285–297, 2011.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Ян, Х. Ся, З. Хан и Х. Пан, «Аппаратное моделирование гидравлической механической трансмиссии на основе сигнала синхронизации», Труды Китайского общества сельскохозяйственной инженерии , том. 28, нет. 4, стр. 33–38, 2012 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Copyright
Copyright © 2015 Shujun Yang et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Патент США на патент устройства гидравлической трансмиссии (Патент № 4,771,676 выдан 20 сентября 19 г.88)
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству гидравлической трансмиссии, способному работать либо как гидравлический насос, преобразующий механическую энергию в гидравлическую, либо как гидравлический двигатель, который получает гидравлическую энергию и преобразует ее в механическую. энергии, а более конкретно, к аксиально-поршневому насос-двигателю с наклонной шайбой, имеющей наклонную шайбу.
Аксиально-поршневой насос-двигатель с наклонной шайбой традиционно известен как устройство гидравлической передачи, которое можно использовать для преобразования полученной механической энергии в гидравлическую энергию или, наоборот, для получения механической энергии из гидравлической энергии. Есть два типа качающейся шайбы, аксиально-поршневые насос-двигатели; один представляет собой аксиально-поршневой насос-двигатель с постоянным рабочим объемом, который имеет наклонную шайбу, установленную под постоянным углом наклона, а другой представляет собой аксиально-поршневой насос-двигатель с переменным рабочим объемом, который позволяет изменять угол наклона наклонной шайбы. Особой разницы в принципе преобразования энергии между этими типами нет.
РИС. 1 показан пример обычного аксиально-поршневого насоса-мотора переменного рабочего объема, который раскрыт в публикации японского патента № 39569/1970. В этом примере один конец корпуса 14 (т.е. левый конец, если смотреть на чертеж) закрыт и имеет по существу в центре сквозное отверстие для вставки приводного вала, в то время как другой конец корпуса 14 (т.е. , правый конец, как видно на чертеже) открыт. Приводной вал 11 соединен с источником энергии, таким как двигатель (не показан), вставлен в сквозное отверстие и закреплен на одном конце в корпусе 14 с помощью подшипника 16. Блок 13 цилиндров имеет шлицы на приводной вал 11 и снабжен множеством цилиндров 18А, которые разнесены под углом вокруг продольной оси вращения приводного вала и расположены параллельно этой оси. Каждый из множества поршней 18 вставлен в соответствующий цилиндр 18А для совершения в нем возвратно-поступательного движения, и каждый имеет конец (т.е. левый конец, если смотреть на чертеже), выполненный в виде сферической головки, которая взаимодействует с возможностью вращения с соответствующим башмаком 19.который поддерживается в основном в непрерывном контакте с плоской поверхностью наклоняемого наклонного или кулачкового диска 20 при вращении блока 13 цилиндров.
Один конец блока цилиндров 13 (т.е. левый конец, если смотреть на чертеже) находится в зацеплении с фиксатором 12, который имеет сферическую наружную поверхность и установлен на валу 11 для поддержки наклонной шайбы 20 через башмаки 19 и возвратную пластину 22. Угол наклона наклонной шайбы 20 можно изменять с помощью привода, встроенного в корпус.
Торцевая часть корпуса 14 на его открытом конце закрыта задней крышкой 15 над пластиной порта (клапанной пластиной) 23, а другой конец блока цилиндров 13 может скользить по пластине порта 23. По существу центральное расположение передней пластины 23 и задней крышки 15 имеют соосные отверстия, в которые вставляется другой конец 11А приводного вала 11 так, чтобы он опирался на заднюю крышку 15. Блок 13 цилиндров, насаженный на шлицы на приводном валу 11, поддерживается таким образом в корпусе 14. Пластина 23 порта и задняя крышка 15 снабжены множеством впускных и выпускных отверстий 27 и 26, сообщающихся с соответствующими цилиндрами 18А, так что устройство может действовать как аксиально-поршневой насос за счет всасывание и выпуск рабочей жидкости снаружи и наружу, когда приводной вал 11 вращается за счет работы источника привода, вызывая вращение блока 13 цилиндров и возвратно-поступательное движение поршней 18; или, наоборот, как аксиально-поршневой двигатель, когда всасывание и нагнетание рабочей жидкости вызывает вращение приводного вала.
Однако в обычном аксиально-поршневом насос-двигателе с наклонной шайбой, имеющем вышеописанное устройство, блок 13 цилиндров, приводной вал 11 и фиксатор 12 соответственно состоят из отдельных составных частей, а фиксатор 12 поджимается пружинами 30, предусмотренными в блоке 13 цилиндров, к кольцевой возвратной пластине 22, контактирующей с башмаком. Следовательно, общая конструкция устройства усложняется, а затраты на его производство высоки. Кроме того, поскольку блок 13 цилиндров и приводной вал 11 состоят из отдельных составных частей, при сборке между этими элементами могут возникать небольшие зазоры, вызывающие их относительное перемещение и, следовательно, шум при изменении нагрузки.
В связи с этими обстоятельствами были сделаны различные предложения, в том числе предложение по компоновке, в которой блок цилиндров, приводной вал и фиксатор имеют единую конструкцию, в попытке решить описанные выше проблемы. . Однако в этом предложении торцевая поверхность блока цилиндров 13 (правая торцевая поверхность, если смотреть на фиг. 1), которая удалена от конца приводного вала, закрепленного подшипником, и находится в скользящем контакте с портовой пластиной 23, поддерживается. в корпусе 14 за счет того, что задняя концевая часть 11А приводного вала 11 выступает через эту торцевую поверхность блока 13 цилиндров в заднюю крышку 15. Таким образом, эта опора правой торцевой поверхности блока 13 цилиндров требует выступающей назад концевая часть 11А приводного вала 11. Однако выступающая часть вала представляет собой препятствие для обработки задней торцевой поверхности блока 13 цилиндров и затрудняет обработку задней торцевой поверхности с очень высокой степенью точности. Следовательно, почти невозможно ограничить величину утечки между торцевой поверхностью блока 13 цилиндров и пластиной 23 порта до небольшой величины. Таким образом, в предшествующем уровне техники не было возможности создать высокоэффективный двигатель-насос.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является устранение вышеописанных проблем предшествующего уровня техники и создание гидравлического трансмиссионного устройства, которое способно ограничить количество утечек до очень малого количества и таким образом является эффективным.
Другой целью настоящего изобретения является создание гидравлического трансмиссионного устройства, в котором приводной вал, фиксатор и блок цилиндров имеют единую конструкцию и в котором приводной вал не выступает назад через заднюю торцевую поверхность цилиндра. блок за пластиной порта, чтобы устройство было компактным и высокоточным.
Еще одна цель настоящего изобретения состоит в том, чтобы предложить аксиально-поршневой насос-двигатель с наклонной шайбой, который усовершенствован таким образом, чтобы добиться уменьшения общего количества составных частей и уменьшения причин шума.
Для достижения вышеуказанных и других целей настоящее изобретение обеспечивает устройство гидравлической передачи, предназначенное для преобразования гидравлической энергии в механическую энергию и наоборот, отличающееся тем, что: приводной вал, фиксатор и блок цилиндров которые все предусмотрены в корпусе устройства и имеют цельную конструкцию; углубление сформировано по существу в центральном месте торцевой поверхности блока цилиндров, которое находится на стороне открытого конца корпуса; и крышка, закрывающая открытый конец корпуса, имеет выступающую часть, которая проходит через проходную пластину и входит в зацепление с выемкой блока цилиндров через подшипник.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
РИС. 1 представляет собой вид в продольном разрезе обычного аксиально-поршневого насоса-двигателя с наклонной шайбой;
РИС. 2 представляет собой продольный разрез аксиально-поршневого насоса-мотора с наклонной шайбой согласно первому варианту осуществления настоящего изобретения; и
РИС. 3 представляет собой вид в продольном разрезе аксиально-поршневого насоса-мотора с наклонной шайбой согласно второму варианту осуществления настоящего изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Далее настоящее изобретение будет подробно описано со ссылкой на прилагаемые чертежи.
РИС. 2 представляет собой вид в продольном разрезе аксиально-поршневого насоса-мотора с наклонной шайбой в качестве гидравлического трансмиссионного устройства согласно первому варианту осуществления настоящего изобретения. Двигатель-насос в этом варианте осуществления относится к типу с наклонной шайбой с фиксированным углом наклона. Составные части или элементы, обозначенные теми же ссылочными позициями, что и на фиг. 1 будет описан только кратко.
На фиг. 2, корпус 14 имеет закрытую концевую часть и открытую концевую часть соответственно с левой и правой стороны, как показано на чертеже. По существу центральное расположение закрытой концевой части корпуса 14 имеет сквозное отверстие, и приводной вал 11, соединенный с источником привода, таким как двигатель М, вставлен в это сквозное отверстие так, чтобы он поддерживался корпусом 14 с возможностью вращения через подшипник 16. Открытый торец корпуса 14 закрыт задней крышкой 15, которая снабжена отверстиями для всасывания и выпуска жидкости, описанными ниже.
В этом варианте осуществления настоящего изобретения приводной вал 11, фиксатор 12, установленный на приводном валу 11 и имеющий сферическую внешнюю поверхность, и блок 13 цилиндров выполнены как единое целое, например, с помощью известного методом литья или ковки. В блоке 13 цилиндров предусмотрено множество цилиндров 18А, которые обеспечивают возвратно-поступательное движение соответствующего множества поршней 18, находящихся в нем. Сферическая головка на конце каждого поршня соединена с возможностью вращения с соответствующим башмаком 19.которая находится в контакте с наклонной шайбой 20, прикрепленной к закрытой концевой части корпуса 14 под постоянным углом наклона таким образом, чтобы обеспечить качательное движение наклонной шайбы 20. Более конкретно, башмаки 19 удерживаются в тесном контакт с наклонной шайбой 20 под давлением фиксатора 12 через пружины 21, изготовленные из такого материала, как сталь, и возвратной пластины 22.
Открытый конец корпуса 14 уплотнен задней крышкой 15 и крышкой 15 находится в тесном контакте с задней концевой частью блока 13 цилиндров над пластиной 23 порта. Задняя концевая часть блока 13 цилиндров имеет выемку 13А, образованную по существу в центре его задней торцевой поверхности. Выступающая часть 15А задней крышки 15, выполненная за одно целое с ней, вставляется в эту выемку блока 13 цилиндров, чтобы поддерживать блок 13 цилиндров с возможностью вращения через подшипник 17.
Портовая пластина 23 снабжена серповидными отверстиями 24 и 25 для выпуска и всасывания жидкости, соответственно, сообщающимися с множеством цилиндров 18А, предусмотренных в блоке цилиндров 13. Эти отверстия 24 и 25 проходят через крышку 15 и их поперечные сечения сходятся в круглые поперечные сечения нагнетательного и всасывающего окон 26 и 27, которые соединены с внешним механизмом.
Устройство по первому варианту осуществления имеет описанную выше компоновку. Далее будет описана работа устройства в предположении, что устройство используется в качестве насоса.
Когда приводной вал 11 приводится в движение источником привода М, приводной вал 11 вращается, а фиксатор 12 и блок цилиндров 13, которые составляют одно целое с валом 11, также вращаются внутри корпуса 14. Это вращение преобразуется в возвратно-поступательные движения поршней 18 влево и вправо, поскольку поршни 18 функционально связаны с наклонной шайбой 20 посредством фиксатора 12, упругого элемента 21, возвратной шайбы 22 и башмаков 19. В результате в показанном варианте осуществления когда каждый поршень 18 перемещается влево, поршень всасывает жидкость из всасывающего патрубка 27 задней крышки 15 и отверстия 25 патрубка 23 в цилиндр 18А; и наоборот, когда каждый поршень 18 перемещается вправо, поршень 18 выбрасывает жидкость наружу через отверстие 24 проходной пластины 23 и выпускное отверстие 26 задней крышки 15. Таким образом, устройство действует как гидравлический осевой поршень. насоса путем преобразования механической энергии, вырабатываемой двигателем М, в гидравлическую энергию.
Устройство также может быть выполнено в качестве гидравлического аксиально-поршневого двигателя путем реверсирования описанной выше работы гидропередачи, то есть вызывая возвратно-поступательное движение поршней путем подачи жидкости к поршням, для вращения приводного вала через вращения блока цилиндров.
РИС. 3 показан второй вариант осуществления настоящего изобретения. Этот вариант осуществления отличается компоновкой от первого варианта осуществления, показанного на фиг. 2 тем, что каждая из поверхностей блока 13 цилиндров и пластины 23А порта, на которой эти элементы удерживаются в контакте друг с другом, выполнена в виде сферической поверхности. Как показано на чертеже, передняя пластина 23А имеет сферическую поверхность, выпуклую по направлению к приводному валу 11, в то время как задняя торцевая поверхность 13С блока 13 цилиндров, которая соприкасается с этой поверхностью проходной пластины 23А, выполнена в виде вогнутой сферической формы. поверхность, совпадающая с выпуклой сферической поверхностью пластины 23А порта. Благодаря такому расположению, даже если задняя торцевая поверхность 13С блока 13 цилиндров имеет тенденцию к смещению под действием силы, перпендикулярной оси вращения, зацепление между блоком 13 цилиндров и пластиной 23А порта не подвергается неблагоприятному воздействию. Излишне говорить, что аналогичный эффект может быть получен при расположении, в котором пластина 23А порта и задняя торцевая поверхность 13С блока 13 цилиндров находятся во взаимном контакте на сферических поверхностях, каждая из которых изогнута в противоположном направлении.
Вторая особенность варианта осуществления, показанного на фиг. 3, заключается в том, что всасывающее и выпускное отверстия 27 и 26, предусмотренные в задней крышке 15, выполнены в виде ступенчатых отверстий, а пружинный элемент 29 вставлен между пластиной 23А отверстия и ступенчатым плечом, чтобы поджимать втулку 28 к пластину 23А с отверстиями и тем самым подтолкнуть пластину 23А с отверстиями к задней торцевой поверхности блока 13 цилиндров, тем самым улучшая зацепление между этими двумя элементами. В частности, когда давление подачи жидкости низкое, эта вынуждающая сила действует, чтобы предотвратить любое падение герметичности. Само собой разумеется, что этот метод формирования ступенчатых отверстий и вставки втулок и пружин также может быть применен к варианту осуществления, показанному на фиг. 2.
Герметичный эффект уплотнения может быть дополнительно усилен за счет использования элемента, такого как уплотнительное кольцо 31, на участке зацепления между задней крышкой 15 и корпусом 14.
В предыдущем варианте осуществления пружинные элементы 21 вставлены между пластиной 22 и фиксатором 12, чтобы удерживать башмаки 19 в контакте с наклонной шайбой 20. Однако увеличение количества составных частей может привести к усложнению конструкции и увеличению причин шума между элементами. Поэтому, как показано на фиг. 3, конструкция этого варианта осуществления такова, что возвратная пластина 22, изготовленная из эластичного материала, такого как фосфористая бронза или пружинная сталь, расположена между башмаками 19.и фиксатор 12, что делает пружинные элементы 21 излишними. Благодаря такому расположению может быть достигнуто уменьшение количества составных частей и, следовательно, уменьшение причин шума.
Хотя вышеприведенное описание вариантов осуществления настоящего изобретения касается аксиально-поршневого насоса-мотора постоянного рабочего объема, который имеет наклонную шайбу, наклоненную под фиксированным углом наклона, следует понимать, что настоящее изобретение также может применяться к аксиально-поршневому насос-двигателю с переменным рабочим объемом, описанному со ссылкой на фиг. 1, в котором угол наклона наклонной шайбы может изменяться.
Аксиально-поршневой насос-двигатель с наклонной шайбой согласно изобретению обеспечивает эффект, описанный ниже. Поскольку приводной вал, фиксатор и блок цилиндров имеют единую конструкцию, общая конструкция упрощается, в то же время повышается надежность и снижаются производственные затраты. Кроме того, поскольку приводной вал, фиксатор и блок цилиндров выполнены как единая конструкция, исключается вероятность возникновения зазоров между этими элементами, что устраняет риск возникновения какого-либо шума даже при изменении нагрузки. . Кроме того, поскольку нет необходимости делать выступ, такой как конец ведущего вала, выступающим через торцевую поверхность блока цилиндров, которая удалена от ведущего вала, торцевая поверхность может быть обработана со значительно повышенной степенью точности, что позволяет ограничить количество утечек между блоком цилиндров и портовой пластиной до очень малого значения и, таким образом, повысить эффективность. Кроме того, поскольку задняя торцевая поверхность блока цилиндров и внутренняя поверхность проходной пластины, которая находится в скользящем зацеплении с этой задней торцевой поверхностью, сформированы в соответствующие сферические поверхности, зацепление между этими поверхностями улучшается, увеличивая величину утечки между эти поверхности малы, даже если к блоку цилиндров прилагается изгибающее напряжение под действием определенной внешней силы, что обеспечивает эффективную работу.
Другой аспект настоящего изобретения обеспечивает эффект дополнительного улучшения сцепления между блоком цилиндров и пластиной порта за счет создания уплотнительных колец, которые передают усилие пружины упругих элементов и давление, действующее на заднюю поверхность пластины порта, и путем приведения одного конца уплотнительных колец в контакт с задней поверхностью пластины порта.
Еще один аспект настоящего изобретения обеспечивает эффект достижения уменьшения общего количества составных частей и уменьшения причин шума за счет использования эластичного элемента в качестве возвратной пластины, что устраняет необходимость в эластичном элементе, вставленном между фиксатором и возвратной пластиной.
4 типа силовой передачи – механическая, электрическая, гидравлическая и пневматическая (за и против)
Что такое силовая передача?
Рама Jh31 серии C с фиксированным столом Пневматический пресс…
Пожалуйста, включите JavaScript
Рама Jh31 серии C Пневматический пресс с фиксированным столом
Метод трансмиссии — это инженерный метод, который выравнивает силовую машину и рабочую часть машины в отношении конфигурации энергии, скорости движения и формы движения.
Типы передачи мощности
Существует четыре типа методов передачи энергии, включая механическую передачу, электрическую передачу, гидравлическую передачу мощности и пневматическую передачу мощности.
Ни один из этих способов не идеален, и сегодня я хотел бы поделиться преимуществами и недостатками каждого из четырех способов передачи.
Тип 1: механическая трансмиссия
Что такое механическая трансмиссия?
Механическая передача энергии относится к продуктам, используемым для перемещения механических частей, а не для подачи электроэнергии. Эти продукты включают муфты, цепи и звездочки, ремни и шкивы, а также компоненты привода.
Система механической трансмиссии является важной частью станка. Он в основном приводится в движение шариковым винтом, который интегрирован с подвижным валом в процессе передачи. Станок приводится в действие двигателем. Задача механической трансмиссии — передавать движение и силу.
Обычно используемые типы механических трансмиссий включают зубчатую передачу, червячную передачу, ременную передачу, цепную передачу и зубчатую передачу.
Роль механической трансмиссии заключается в передаче как движения, так и силы.
Типы механической силовой передачи
Наиболее распространенная механическая силовая передача в основном включает: зубчатую передачу, турбовихревой привод, ременную передачу, цепную передачу, зубчатую передачу и т. д.
01 Зубчатая передача используемый тип трансмиссии в механической трансмиссии.
Обеспечивает точную, эффективную, компактную, надежную и долговечную передачу.
Существует несколько различных типов зубчатых передач, которые классифицируются на основе различных стандартов.
Преимущества:
- Компактная конструкция, идеально подходит для передачи на короткие расстояния.
- Совместим с широким диапазоном периферийных скоростей и мощностей.
- Передаточное число точное, стабильное и эффективное.
- Высокая надежность и длительный срок службы.
- Способен передавать движение и усилие между параллельными осями, пересекающимися осями под любым углом и смещенными осями под любым углом.
Недостатки:
- Высокая точность изготовления и монтажа и высокая стоимость;
- Не подходит для передачи между двумя осями на большие расстояния;
- Без защиты от перегрузки.
02 Turbo Vortex Drive
Подходит для перемещения и подачи мощности между двумя осями с вертикальными и непересекающимися промежутками.
Преимущества:
- Большое передаточное число;
- Компактная конструкция.
Недостатки:
- Большое осевое усилие
- Легко нагревается
- Низкий КПД
- Только односторонняя передача.
Основные параметры привода турбины:
- Модуль
- Угол наклона
- Червячная делительная окружность
- Червячная делительная окружность
- Ход хода
- Номер червячной передачи
- Количество головок червяка
- Передаточное отношение
03 Ременная передача
Ременная передача представляет собой механическую систему передачи, в которой для передачи движения или мощности используется гибкий ремень, натянутый на шкивы.
Ременная передача обычно состоит из ведущего колеса, ведомого колеса и бесконечного ремня, натянутого между двумя колесами.
1) Когда направление вращения двух осей параллельно, это называется открытым движением, межцентровым расстоянием и концепцией угла охвата.
2) Ремни можно разделить на три категории в зависимости от их формы поперечного сечения: плоский ремень, клиновой ремень и специальный ремень.
3) В центре его приложений:
- расчет передаточного отношения;
- Расчет напряжения ремня;
- допустимая мощность одноклинового ремня.
Плюсы и минусы ременного привода:
Преимущества:
- Применимо к трансмиссии с большим межосевым расстоянием между двумя валами, ремень обладает хорошей гибкостью, может смягчать удары и поглощать вибрации;
- Скольжение при перегрузке для предотвращения повреждения других частей;
- Простая конструкция и низкая стоимость.
Недостатки:
- Внешние размеры трансмиссии большие;
- Требуется натяжное устройство;
- Из-за проскальзывания фиксированное передаточное число не может быть гарантировано;
- Ремень имеет короткий срок службы;
- Низкая эффективность передачи.
04 Цепной привод
Цепной привод представляет собой механическую систему передачи, которая передает движение и мощность от ведущей звездочки со специальной формой зубьев к ведомой звездочке с аналогичной формой зубьев через цепь.
, в том числе:
- Активная цепь
- Драговая цепь
- Циркулярная цепь
Преимущества:
.
Отличительные особенности цепного привода по сравнению с зубчатой передачей:
- Низкие требования к изготовлению и установке;
- При большом межосевом расстоянии структура передачи проста;
- Мгновенная скорость цепи и мгновенное передаточное число не являются постоянными, и трансмиссия менее стабильна.
Недостатки:
Основные недостатки цепного привода:
- Может использоваться только для передачи между двумя параллельными валами При работе возникают дополнительные динамические нагрузки, вибрация, удары и шум
- Не следует использовать в быстроходном реверсивном приводе.
05 Зубчатая передача
Система трансмиссии, состоящая из более чем двух передач, называется зубчатой передачей. Зубчатую передачу можно разделить на два типа: обычная зубчатая передача и планетарная передача. Планетарная передача — это передача, которая совершает как вращательное, так и осевое движение в зубчатой передаче.
Зубчатую передачу можно разделить на две категории: передача с фиксированной осью и планетарная передача. Передаточное отношение поезда, представляющее собой отношение угловой скорости (или скорости вращения) входного вала к выходному валу, рассчитывается путем деления произведения числа зубьев всех ведомых шестерен в каждой паре зацепления шестерни по количеству зубьев всех ведущих шестерен.
В эпициклической зубчатой передаче планетарная шестерня, которая совершает как вращательное, так и осевое движение, противопоставляется центральной шестерне или солнечной шестерне, которая имеет фиксированное осевое положение. Передаточное число эпициклической зубчатой передачи не может быть рассчитано напрямую и требует использования метода относительного движения (или метода инверсии) для преобразования эпициклической зубчатой передачи в гипотетическую передачу с фиксированной осью.
Характеристики зубчатой передачи включают:
- Подходит для передачи между двумя осями, которые находятся далеко друг от друга;
- Может использоваться в качестве трансмиссии для передачи с переменной скоростью;
- Можно получить большее передаточное число;
- Достигните синтеза и разложения движения.
Тип 2: Электрический привод
Электрический привод относится к использованию электродвигателей для преобразования электрической энергии в механическую для приведения в действие различных типов производственного оборудования, транспортных средств и других предметов, которые требуют движения в повседневной жизни.
Преимущества:
Высокая точность: В качестве источников энергии используются серводвигатели, а простой и эффективный механизм передачи, состоящий из шарико-винтовых пар и зубчатых ремней, дает ошибку повторяемости 0,01%. Этот метод передачи используется в листогибочных машинах.
Энергосбережение: Энергия, высвобождаемая на фазе торможения рабочего цикла, может быть преобразована обратно в электроэнергию, что снижает эксплуатационные расходы и требует только 25% силового оборудования, необходимого для гидравлических приводов.
Точное управление: При поддержке высокоточных датчиков, измерительных устройств и компьютерных технологий можно добиться точного управления в соответствии с заданными параметрами, что значительно превышает точность управления другими методами управления.
Защита окружающей среды: Более низкое энергопотребление и оптимизированная производительность приводят к уменьшению загрязнения и шума, обеспечивая лучшую защиту окружающей среды для предприятия.
Пониженный уровень шума: Рабочий шум составляет менее 70 децибел, что составляет примерно 2/3 шума, производимого машиной для литья под давлением с гидравлическим приводом.
Экономия: Отсутствие затрат на гидравлическое масло и связанное с ним техническое обслуживание, отсутствие необходимости в жестких или мягких трубах, охлаждении гидравлического масла или снижении затрат на охлаждающую воду.
Пневматическая трансмиссия использует сжатый газ в качестве рабочей среды и передает мощность или информацию посредством давления газа.
Преимущества:
Воздух, являющийся рабочей средой в пневматической передаче, относительно легко достать. Использованный воздух можно легко сбросить в атмосферу, что устраняет необходимость в восстановленном топливном баке и трубопроводе, как в гидравлической трансмиссии.
Кроме того, очень низкая вязкость воздуха (около одной десятитысячной гидравлического масла) приводит к минимальным потерям и позволяет легко концентрировать подачу газа и транспортировать его на большие расстояния. Утечки в пневматических системах также не вызывают такого сильного загрязнения окружающей среды, как гидравлические приводы.
По сравнению с гидравлической трансмиссией пневматическая трансмиссия отличается быстрым действием, быстрой реакцией, низкими эксплуатационными расходами, чистой рабочей средой и отсутствием порчи среды. Кроме того, он хорошо адаптируется к суровым условиям работы, таким как легковоспламеняющиеся, взрывоопасные, пыльные, сильные магнитные поля, радиация и вибрация, что делает его превосходящим гидравлические, электронные и электрические системы управления.
Наконец, пневматическая трансмиссия экономична и имеет возможность автоматической защиты от перегрузок.
Недостатки:
На стабильность рабочей скорости влияет сжимаемость воздуха. Однако использование газожидкостного рычажного устройства дает удовлетворительные результаты.
Из-за низкого рабочего давления, составляющего обычно 0,31 МПа, и необходимости сохранения небольшого размера конструкции общая выходная сила не должна превышать 10–40 кН.
Высокоскоростной выхлоп создает значительный шум, поэтому для его уменьшения добавлен глушитель.
Скорость передачи газовых сигналов в пневматических устройствах меньше скорости электронов и света в пределах скорости звука. В результате пневматические системы управления не должны использоваться в сложных схемах с большим количеством ступеней.
Тип 4: Гидравлическая трансмиссия
Гидравлическая трансмиссия — это метод передачи энергии и управления посредством использования жидкости в качестве рабочей среды.
Преимущества:
С точки зрения конструкции, четыре режима трансмиссии имеют сжатую выходную мощность на единицу веса и размера, а также большой коэффициент инерции момента. Однако гидравлическая трансмиссия имеет меньший объем при передаче той же мощности, малый вес, малую инерцию, компактную конструкцию и гибкую компоновку.
Гидравлическая трансмиссия обеспечивает бесступенчатую регулировку скорости, крутящего момента и мощности с малым временем отклика и широким диапазоном скоростей от 100:1 до 2000:1. Управление и регулировка относительно просты, что делает его удобным в эксплуатации и экономит труд. Кроме того, его легко интегрировать с электрическими системами управления и компьютерными системами для автоматизации.
С точки зрения использования и технического обслуживания, гидравлические компоненты обладают хорошими самосмазывающимися свойствами, их легко защитить от перегрузок и поддерживать давление, они безопасны и надежны. Компоненты также легко стандартизируются и обобщаются.
Гидравлическая технология известна своей безопасностью и надежностью, а ее пластичность и изменчивость обеспечивают большую гибкость производства, позволяя легко вносить изменения и корректировки в производственный процесс. Кроме того, гидравлические компоненты относительно недороги и легко адаптируются.
Сочетание гидравлических технологий с новыми технологиями, такими как микрокомпьютерное управление, становится тенденцией в мире и представляет собой интеграцию «машина-электро-гидравлика-свет», что упрощает цифровизацию.
У всего есть две стороны, есть преимущества и недостатки. Не исключение и гидроприводы:
Недостатки:
Относительное перемещение поверхностей в гидротрансмиссии приводит к неизбежным утечкам масла, а масло не является полностью несжимаемым. Это может привести к отсутствию точного передаточного отношения и сделать его непригодным для использования в трансмиссионных цепях станков, таких как зубчатые передачи.
Имеются потери, такие как продольные потери, локальные потери и утечки во время потока масла, что приводит к низкой эффективности передачи и делает ее непригодной для передачи на большие расстояния.
Гидравлическая трансмиссия испытывает трудности в условиях высоких и низких температур.
Чтобы предотвратить утечку масла и соответствовать требованиям к производительности, гидравлические компоненты должны быть изготовлены с высокой точностью, что может создать трудности при использовании и обслуживании.
Диагностика неисправностей в гидравлических системах может быть сложной задачей, особенно в областях, где гидравлические технологии не используются широко. Это часто препятствует более широкому продвижению и применению гидравлических технологий. Обслуживание гидравлического оборудования требует определенного уровня опыта, а подготовка специалистов по гидротехнике занимает больше времени.
0
акции
Типы механической передачи энергии
Силовая передача – это технический метод, который задействует машину и рабочую часть машины с точки зрения конфигурации энергии, движения, скорости и формы движения .
Есть разные продукты, в том числе мелкие и крупные механические компоненты, которые делают возможной передачу энергии. А когда дело доходит до передачи мощности, всем нужны оптимальные, надежные и функциональные механические изделия. Различные организации имеют обширный портфель продуктов для передачи электроэнергии, которые не только прочны, но и эффективны.
В настоящее время используются четыре типа силовой передачи:
- Механическая
- Электрика
- Гидравлический
- Пневматический
В этом руководстве мы подробно расскажем об этих типах и рассмотрим каждый из них с его плюсами и минусами. Итак, давайте посмотрим!
Что такое механическая передача энергии?
Механическая передача энергии, изображение предоставлено ShutterStock
Передача энергии — это поток энергии от точки ее источника к месту, где она используется для выполнения полезной работы с использованием простых механизмов, элементов механической передачи энергии и рычажных механизмов. Обычно каждая машина работает после передачи мощности и движения от источника входного сигнала.
Существуют различные способы генерирования энергии, но иногда невозможно генерировать энергию в нужной форме, направлении и величине там, где это необходимо. Именно здесь электрические и механические силовые передачи играют жизненно важную роль в конструкции любого инженерного продукта.
4 типа силовой трансмиссии
1. Механическая трансмиссия
Шестеренчатая трансмиссия #1
Трансмиссия Шестеренчатая, изображение предоставлено ShutterStock
Зубчатая трансмиссия — одна из наиболее широко используемых форм трансмиссии в механической трансмиссии. Передаточное отношение, создаваемое им, является более точным, стабильным и высокоэффективным. Даже это обеспечивает компактную структуру, надежную работу и длительный срок службы. Зубчатые передачи обеспечивают всесторонний охват зубчатых передач и зубчатых передач.
Цилиндрические, винтовые, конические, червячные редукторы — все они покрыты надлежащим контролем точности, грузоподъемностью и производством. Он может получить передачу между параллельной осью, пересекающейся осью любого угла и колеблющейся осью любого угла.
Преимущества
- Долгий срок службы и высокая надежность;
- Имеет компактную конструкцию и обеспечивает стабильную, точную и эффективную передачу;
- Применяется в широком диапазоне периферийных устройств.
Недостатки
- Высокая точность при монтаже и высокая стоимость;
- Ненадежный выбор для передачи между двумя осями на большое расстояние;
- Нет защиты от перегрузки.
#2 Turbo Vortex Drive
Подходит для движения и мощности между двумя осями с вертикальными и непересекающимися областями.
Преимущества
- Большое передаточное число;
- Структура компактная.
Недостатки
- Значительная осевая нагрузка
- Низкая эффективность
- Только односторонняя передача
- Легко нагревается
#3 Ременная передача
Автомобильный генератор с ременной передачей, изображение предоставлено ShutterStock
Ременная передача — это механическая трансмиссия, в которой используется регулируемый ремень, натянутый на шкив для передачи движения или мощности. Обычно он состоит из ведущего колеса, принудительного колеса и бесконечного ремня, натянутого на два колеса. Тип ремня доступен в трех категориях: плоский ремень, клиновой ремень и специальный ремень. Общая цель ременного привода состоит в том, чтобы оценить передаточное отношение, расчет напряжения ремня и допустимую мощность одинарного клинового ремня.
Преимущества
- Ремень обладает удивительной гибкостью и может поглощать вибрации.
- Предотвращение повреждений при скольжении
- Простая конструкция и низкая стоимость
Недостатки
- Внешний размер коробки передач большой
- фиксированное передаточное отношение не может быть гарантировано из-за проскальзывания
- Имеет короткий срок службы
- Низкая эффективность передачи
2. Электропривод
Электропривод
Как правило, электропривод используется для преобразования электрической энергии в механическую, которая в дальнейшем используется для привода различных видов производственного оборудования, транспортных средств и других предметов, необходимых для движения в жизни.
- Высокая точность: В качестве источника питания используется серводвигатель. Принимая во внимание, что шариковый винт и зубчатый ремень используются для простого и эффективного механизма передачи. Листогибочный пресс использует эту трансмиссию.
- Энергосбережение: Энергия, высвобождаемая на фазе торможения рабочего цикла, может быть преобразована в электрическую энергию для повторного использования. Это также поможет снизить эксплуатационные расходы. Прилагаемому электрическому оборудованию требуется только 25% силового оборудования для гидравлического привода.
- Точное управление: При поддержке высокоточных датчиков, измерительных приборов, компьютерной техники можно настроить точное управление по заданным параметрам. Это значительно превзойдет точность, достигаемую другими методами контроля.
- Охрана окружающей среды: Загрязнение окружающей среды и уровень шума снижаются благодаря сокращению энергопотребления и оптимизации производительности. Это также дает лучшую гарантию защиты окружающей среды.
- Экономия: Расходы на гидравлическое масло и возникающие проблемы исключены. Нет жесткой трубы или мягкой трубы, а также нет необходимости охлаждать гидравлическое масло.
3. Гидравлическая трансмиссия
Гидравлическая трансмиссия, изображение предоставлено Camarilloindy.com
Гидравлическая трансмиссия — это система трансмиссии, в которой жидкость используется в качестве рабочего механизма для передачи мощности двигателя на ведущие колеса. Это совокупность гидравлических механизмов, позволяющих передавать энергию от ведущего элемента к ведомому, в котором движение передается с помощью сжатой жидкости.
Преимущества
- Если вы оцените с точки зрения конструкции, вы увидите, что выходная мощность на единицу веса и размера ограничена в четырех типах режимов передачи. При передаче той же мощности мощность гидравлической трансмиссии невелика. Следовательно, он обеспечивает малый вес, низкую инерцию, компактную конструкцию и гибкую компоновку.
- Можно получить быстрый отклик, если оценивать его с точки зрения производительности, нужно регулировать скорость, крутящий момент и мощность. Кроме того, вы получите широкий диапазон скоростей (от 100:1 до 2000:1), быстрый ход, простое управление и регулировку, удобное управление и экономию труда. Он адаптирован для помощи в электрическом управлении и связи с ЦП (компьютером) для облегчения индустриализации.
- Компоненты гидравлического трансмиссионного устройства отличаются хорошими смазывающими свойствами. Даже с этими компонентами легко добиться обобщения, стандартизации и сериализации.
- Все оборудование с гидравлической технологией безопасно и надежно.
- Гибкость и изменчивость гидравлических технологий очень сильны. Это может улучшить гибкость пластика и настроить производственный процесс. Все эти компоненты сравнительно недороги в производстве и обладают умеренно высокой универсальностью.
- Надежное сочетание гидравлической технологии с такими технологиями, как микрокомпьютерное управление, обеспечивает интеграцию «машина-электро-гидравлика-свет». Это становится тенденцией мирового развития и легко осуществимой цифровизации.
4. Пневматическая трансмиссия
Пневматическая трансмиссия – это трансмиссия, в которой движение передается с помощью сжатого воздуха. Источник энергии производится с использованием сжатого газа в качестве рабочего тела и жидкостной передачи мощности. Однако из-за значительного изменения объема воздуха от повышения давления механизмы рабочего тела могут иметь резкие колебания при движении.
Поэтому пневмопередачи можно применять только в тех случаях, когда не требуется большой плавности хода. Пневмопередачи применяются для управления механизмами на машинах, оборудованных компрессорами для дистанционного управления лебедками привода бульдозера.
Преимущества
- При использовании воздуха в качестве рабочего тела легко получить сжатый газ. При этом отработанный воздух выбрасывается в атмосферу, что удобно в обращении.
- Поскольку вязкость воздуха очень мала, его потери также малы. А за счет этого становится удобно обеспечить газоснабжение и междугородние перевозки. Наличие внешних утечек не загрязняет окружающую среду.
- По сравнению с гидравлической трансмиссией, пневматическая трансмиссия отличается быстрым действием, быстрой реакцией, простотой обслуживания, чистой рабочей средой и нулевым износом.
- Он экономичен и может автоматически защищаться от перегрузок.
- В суровых условиях хорошо приспосабливается.
Заключение
Каждое приложение требует своего подхода. Чтобы точно справиться с процессом передачи энергии, рекомендуется обратиться за помощью к профессионалам. Профессионалы хорошо разбираются в механических продуктах и могут помочь вам с ними.
Об авторе: Мэй Панг — ведущий редактор в области машиностроения, специализирующийся на продуктах автоматизации. Она является менеджером по развитию бизнеса Shafttech, производителя механических компонентов в Азии. Свяжитесь с ней на Linkedin.
Соединения внутри «Системы» должны быть показаны цепью [. схема электропривода […] механические связи. eur-lex.europa.eu eur-lex.europa.eu | Les interconnexions au sein du systme doivent tre indiques au moyen d’un […] схема подключения […] для международных связей. eur-lex.europa.eu eur-lex.europa.eu |
Не распространяется на рулевое оборудование с чисто пневматическим управлением, чисто [. eur-lex.europa.eu eur-lex.europa.eu | Elle ne couvre pas l’quipement de direction timonerie purement pneumatique, purement […] |
Обычно проверка работоспособности […] эффективность была сделана из контроллеров моста, пневматической топливной системы и […] tsb.gc.ca tsb.gc.ca | Нормализация, при проверке функционирования команд […] проходной патрубок пневматической системы питания и карбюратора [. tsb.gc.ca tsb.gc.ca |
The mac hi n e hydraulic/transmission f l ui d is suitable for the comb in e d hydraulic/transmission f l ui d цепи всех […] стандартные марки тракторов. et.amazone.de et.amazone.de | L ‘hui le hydraulique / de bot e de vitesses de la machine convient tous les ci rcui ts hydrauliques / de b o te de [ …] vitesses des modles de tracteurs courants. et.amazone. et.amazone.de |
ручной привод»: система, при которой ручное управление маховик, перемещает руль направления […] daccess-ods.un.org daccess-ods.un.org | commande main»: une commande telle que le mouvement du gouvernail est entran par la manuvre manuelle […] улица Майн, пар. […] доплата. daccess-ods.un.org daccess-ods.un.org |
Гидравлическая трансмиссия б о х, электрогидравлическое управление, […] легкое изменение направления и скорости dstgmachine.com dstgmachine.com | В о te de трансмиссионная гидравлика, co ntr le le ctrohydraulique, […] Направление и легкое устройство смены направления. dstgmachine.fr dstgmachine.fr |
гидравлический привод с ручным управлением»: ручное управление с приводом a гидравлическая трансмиссия . daccess-ods.un.org daccess-ods.un.org | commande main hydraulique» : une c ommande main transmission hydraulique . daccess-ods.un.org daccess-ods.un.org |
Двойной барабан […] ChinaSinoWay.com 9000..com 9000..com 9000.com LAW | Двойной барабан […] тандем яркий est un quipement de compactage lourd. chinasinoway.fr chinasinoway.fr |
Наш двойной барабан […] оборудование для уплотнения. chinasinoway.com chinasinoway. | Нотр компактер ta ndem яркий est un оборудование […] компактный лурд. chinasinoway.fr chinasinoway.fr |
Масляные фильтры — любые навинчиваемые или […] приложения для двигателей — включает […] фильтры для дизельного топлива, но не включает фильтры для бензинового топлива. ec.gc.ca ec.gc.ca | Фильтры huile — tout filtre […] huile movible ou utilis […] двигатели внутреннего сгорания […] — cela comprend les filtres gazole mais ne comprend pas les filtresэссенция. ec.gc.ca ec.gc.ca |
FAAC специализируется на разработке, […] производство и реализация […] для открытия и закрытия дверей, ворот и решеток. somfy.com somfy.com | FAAC est spcialis dans la concept, la production et la […] коммерциализация моторов, […] Увертюра и ферметюр […] Порты, порталы и решетки. somfy.com somfy.com |
Отказ детали из a гидравлической передачи s y st […] водителю устройством с красным сигнализатором […] сигнал загорается до или после приложения перепада давления не более 15,5 бар между активным и неисправным тормозным оборудованием, измеренного на выходе из главного цилиндра, и продолжает гореть до тех пор, пока неисправность сохраняется и выключатель зажигания (пуск) находится в положении в положении «включено» (работает). daccess-ods.un.org daccess-ods.un.org | Несчастный случай […] проводник по месту жительства […] comportant un voyant rouge s’allumant avant ou ds l’exercice d’une pression diffrentielle ne dpassant pas 15,5 bar entre le systme actif et le systme dfaillant, mesure la sortie du matre cylindre, ce voyant devant rester allum tant que dure la dfaillance et que le contact d’allumage (de dmarrage) est dans la position «marche». daccess-ods.un.org daccess-ods.un.org |
CC252 7 — — Hydraulic & Transmission F l ui d Analysis(English) fleetguard.com fleetguard. ком | CC2527 — […] fleetguard. fleetguard.com |
T h e гидравлическая трансмиссия , u se d во многих машинах Repossi, […] позволяет иметь безопасные и надежные продукты с очень низким уровнем обслуживания […] уровней. 3 — Большое внимание уделяется экономии средств: многие машины, будучи прицепными, могут использоваться с маломощными тракторами, что дает значительную экономию топлива и снижение загрязнения окружающей среды. agritechnica.com agritechnica.com | Де плюс, […] модели, разрешение на приобретение машин [. sres et fiables avec des niveaux d’entretien trs bas. 3 — Beaucoup d’attention est prte pour limiter les cots d’utilization: beaucoup de models, tracts, peuvent travailler avec des tracteurs de petite puissance de faon garantir des conomies важных и rduire ле миссий polluantes, ayant дю уважение за l’environnement. agritechnica.com agritechnica.com |
Mechan ic a l — hydraulic transmission g e ar system and method of controlling power transmission using the system v3.espacenet.com v3.espacenet .com | Система м e de трансмиссия m ca niq ue-hydraulique et pr oc d de c ommande d ‘une transmission de p ui ssance [. использовать телефонную систему v3.espacenet.com v3.espacenet.com |
Даже если мы потеряем […] больше за счет уменьшения пробуксовки заднего колеса. yamaha-motor-europe.com yamaha-motor-europe.com | Par consquent, mme sinous perdons de […] en parallle en rduisant le patinage de la roue arrire. yamaha-motor-europe.com yamaha-motor-europe.com |
Это additi на a l гидравлическая трансмиссия t h на предлагает грузовики и легкие [. грузовые автомобили большая мобильность в трудных условиях […] условия движения (грязь, снег). michelinchalengebendum.com michelinchalengebendum.com | Il s ‘a git d’un e transmission a ddition nel le hydraulique of fra nt aux c am ions et [ …] Вспомогательные транспортные средства общего назначения lgers une plus […] grande mobilit в условиях затрудненного кровообращения (boue, neige). michelinchalengebendum.com michelinchalengebendum.com |
Большая дорога […] app.claas.com | Места размещения плюс пороги для […] app.claas.com app.claas.com |
3819.00.00 — Тормоз гидравлический […] 70 мас.% нефти […] масла или масла, полученные из битуминозных минералов. castore.ca castore.ca | 3819.00.00 — […] pas d’huiles de ptrole […] ni de minraux bitumineux или en contenant moins de 70 % en poids. castore.ca castore.ca |
Известно, что эффективность a гидравлической передачи i s l выше, чем у механической. yamaha-motor-europe.com yamaha-motor-europe.com | Весь мир […] yamaha-motor-europe.com yamaha-motor-europe.com |
Поменять гидрост на i c трансмиссию a n d 4 гидравлику0944 s y st em oil filters along with the hydrost at i c transmission/hydraulic s y st em oil after [ . каждые 200 часов работы. yard-man.biz yard-man.biz | Смены […] yard-man.biz yard-man.biz |
S Отбор проб масла для всех основных […] bm-cat.ro bm-cat.ro | S de l’huile pour les principaux systmes lubrifis […] d’une проанализировать S? bm-cat.ro bm-cat.ro |
Это может повредить […] valtra.com valtra.com | Cela peut endommager le tracteur (пар. […] valtra.fr valtra.fr |
Проверьте h yd r o трансмиссия/гидравлика s y st em уровень масла […] через каждые 50 часов работы. yard-man.biz yard-man.biz | Vrifiez le niveau de [. марта. yard-man.biz yard-man.biz |
T h e transmission A hydraulic c y li nder integrated into the headstock regulates weight alleviation […] вместе с газонаполненным аккумулятором. поэттингер.ca поэттингер.ca | Гидравлическая подвеска L a s uspen si on est constitue d ‘u n v rin hydraulique int gr d ans la […] потенция и полив d’accumulateurs boules d’azote. поэттингер.ca поэттингер.ca |
II и III 3-точечное крепление, боковые щитки с возможностью наклона назад, центральная односкоростная передача [. коробка передач при 1000 об/мин, Боковая передача […] автомобильный транспорт, максимальная ширина 250 […] см, Карданные валы боковые вибростойкие Bondioli DS8, баки 6+6 мм с роторами, установленными на специальных конических роликоподшипниках, скользящие специальные сальники Combi, механика бороны N, Задний обойменный каток 40 или пакер 46 см. frandent.com frandent.com | II и III, Защитные люки, Rducteur […] центральный 1000 т/мин, Rducteur […] большемакс. 250 см, дерево […] карданный вал с защитой Bondioli DS8, кессон 6+6 мм с роторами, установленными на рулях, коническими размерами, специальными комбинированными бачками, Herse mcanique N, решетчатой рамой 40 или пакером 46 см. frandent.com frandent.com |
Пакет подогревателя (eng in e , трансмиссия , гидравлика o i l ) fendt.co.uk fendt.co.uk | Kit De Prchauffage (HU IL E MOT EUR , DRANSSICSION , SYST ME 44443 SYST ME 44444430944444430444444444430444444443044444444444443044444304443044444304443044430444303. |
Электронная система управления гидромеханической трансмиссией для скоростных транспортных средств
Эта заявка основана на Предварительной Заявке Сер. № 60/396,653, поданной 18 июля 2002 г.
Настоящее изобретение в целом относится к гидромеханическим трансмиссиям и, более конкретно, к электронным системам управления гидромеханическими трансмиссиями.
Гидромеханические трансмиссии (ГМТ) были разработаны для транспортных средств для замены обычных автоматических трансмиссий с ременным приводом. В частности, HMT были разработаны для использования с вездеходами (ATV). Преимущества HMT включают повышенную мощность, большую долговечность и защиту от ухудшения окружающей среды. Несмотря на то, что механическая реализация и функциональность HMT сильно отличаются от обычных агрегатов с ременным приводом, потребители предпочитают, чтобы транспортные средства управлялись и ощущались как обычные агрегаты с ременным приводом, но при этом обладали преимуществами HMT.
Обычные трансмиссии с ременным приводом используют центробежную муфту или скользящий ремень для плавного ускорения транспортного средства из состояния покоя. Однако с помощью HMT трудно добиться плавных условий запуска.
Еще одним недостатком HMT является неспособность быстро реагировать на динамичную операционную среду. Квадроциклы работают в широком диапазоне скоростей, от медленной скорости до 90 км/ч. Кроме того, квадроциклы используются для самых разных функций, от гонок до буксировки тяжелых грузов. Кроме того, квадроциклы часто используются на самых разных поверхностях. HMT часто с трудом быстро реагируют на эти факторы, создавая более жесткую езду, чем обычные агрегаты с ременным приводом.
Еще одним недостатком HMT является неспособность реагировать на тормозные системы, управляемые оператором. HMT обычно обеспечивают очень небольшую способность динамического торможения и поэтому должны быть защищены от превышения скорости во время замедления транспортного средства.
Таким образом, основной целью настоящего изобретения является создание электронной системы управления для HMT, которая обеспечивает плавный запуск.
Еще одной целью настоящего изобретения является создание электронной системы управления для HMT, которая обеспечивает более быструю реакцию на динамичную рабочую среду.
Еще одной целью настоящего изобретения является создание электронной системы управления для HMT, которая обеспечивает улучшенную реакцию на тормозные системы, управляемые оператором.
Эти и другие объекты будут очевидны специалистам в данной области техники.
Настоящее изобретение включает электронную систему управления трансмиссией, предназначенную для достижения передаточного отношения на основе действий оператора и текущих условий эксплуатации транспортного средства. Изобретение предназначено для ГМТ; однако настоящее изобретение также может быть использовано с чисто гидростатическими трансмиссиями или любой другой системой трансмиссии, которая обеспечивает бесступенчато регулируемое передаточное отношение от нулевой до максимальной выходной скорости.
Благодаря способности настоящего изобретения обеспечить условия плавного запуска настоящее изобретение лучше всего подходит для использования в динамических условиях работы. В частности, настоящее изобретение быстро реагирует на быстрое изменение нагрузки и рабочих характеристик. Кроме того, настоящее изобретение лучше всего подходит для использования с высокоскоростными транспортными средствами. Изобретение предназначено для использования с квадроциклами; однако настоящее изобретение также может быть использовано с другими типами транспортных средств, как больших, так и малых.
Настоящее изобретение оптимизировано для ГМТ с регулируемым соотношением. В такой схеме трансмиссия постоянно соединяет двигатель с нагрузкой, а передаточное число изменяется только изменением команды от электронной системы управления. Механическая функция трансмиссии заключается исключительно в изменении соотношения между ее входом и выходом. Это отличается от обычных трансмиссий, в которых используется устройство, чувствительное к крутящему моменту или нагрузке, такое как проскальзывающий ремень, центробежная муфта, муфта с регулируемым давлением или преобразователь крутящего момента, для обеспечения плавного запуска.
При использовании настоящего изобретения оператор должен выбрать режим работы, автоматический или ручной, с помощью двухпозиционного переключателя. В автоматическом режиме настоящее изобретение определяет скорость транспортного средства с учетом положения дроссельной заслонки и использования тормозов оператором. В ручном режиме настоящее изобретение дополнительно учитывает выбор оператором состояния передачи. Оба режима работы требуют от оператора выбора режима коробки передач, такого как передний низкий, передний высокий, задний ход, нейтраль или парковка.
РИС. 1 представляет собой общую схему системы изобретения;
РИС. 2 представляет собой более подробную схему, показывающую управление положением автомата перекоса, вычисление заданного значения и монитор нагрузки двигателя;
РИС. 3 — схема, иллюстрирующая автоматический режим;
РИС. 4 — схема, иллюстрирующая ручной режим; и
РИС. 5 представляет собой график зависимости заданного значения запуска в ручном режиме от команды двигателя.
Что касается фиг. 1, электронная система управления трансмиссией 10 , который обеспечивает передаточное отношение на основе входных данных оператора и текущих условий эксплуатации транспортного средства. Электронная система управления трансмиссией 10 работает для управления HMT 12 , которая соединяет двигатель автомобиля 14 с колесами автомобиля 16 .
HMT 12 включает насос 18 , соединенный с двигателем 20 замкнутым контуром 22 . Насос 18 соединен с ведомой шестерней 24 вращается с помощью ведущей шестерни 26 , соединенной с коленчатым валом 28 . Двигатель 20 соединен с шестерней 30 , которая соединена с планетарной передачей 32 и работает на ведущие колеса 16 .
Ниже приводится глоссарий терминов для описания системы управления 10 :
| Термин | Описание | |
| . | ||
| Управление тормозом | Воспринимаемое положение тормоза оператора | |
| (обычно | ||
| 41 | ||
| Заданная скорость двигателя | Положение дроссельной заслонки, которое было | |
| преобразовано в число оборотов в минуту. Это приблизительная кривая | ||
| , основанная на нагрузке двигателя без | ||
| . | ||
| Текущая частота вращения двигателя | Фактическая измеренная частота вращения двигателя. | |
| Монитор нагрузки двигателя (ELM) | Блок системы управления, который | |
| уменьшает команду автомата перекоса | ||
| в условиях нагрузки. | ||
| Управление передачей | Оператор выбрал передачу в | |
| ручном режиме. | ||
| Ручной режим | Комплекты электронной системы управления | |
| Передаточное число на основе | ||
| Gear Command Имитирует коробку передач | ||
| с серией из | ||
| Дискретные передаточные числа. | ||
| Расчет уставки | Блок системы управления, который | |
| Блок (SPCB) | вычисляет желаемую уставку | |
| Уставка автомата перекоса | Расчетное желаемое положение автомата перекоса | |
| положение, определяемое по | ||
| СПКБ. | ||
| Положение дроссельной заслонки | Обнаруженное положение дроссельной заслонки оператора | |
| (обычно это | ||
| 1 педаль или рычаг). | ||
| Состояние автомобиля | Либо ускоряется, либо | |
| замедляется. | ||
| Скорость автомобиля | Измеренная скорость автомобиля. | |
Система управления 10 имеет два режима работы: автоматический 34 и ручной 36 . Оператор выбирает режим работы с помощью двухпозиционного переключателя (не показан).
Что касается фиг. 3 показан автоматический режим 34 работы. В автоматическом режиме 34 оператор регулирует положение дроссельной заслонки 38 для достижения желаемой заданной частоты вращения двигателя 40 . Кроме того, оператор может задействовать тормоза транспортного средства 42 для замедления или полной остановки автомобиля. Кроме того, оператор регулирует элемент управления 44 выбора диапазона, чтобы выбрать состояние коробки передач 46 диапазона, включая передний высокий, передний низкий, задний ход, нейтраль и парковку (фиг. 1). Коробка передач диапазона 46 также может включать реверсивное понижение и обратное повышение. Условия обратного проскальзывания могут быть достигнуты путем дальнейшего перемещения автомата перекоса в направлении хода.
Электронный блок управления 48 (РИС. 1) принимает данные оператора и использует их для достижения передаточного отношения. В частности, положение 38 дроссельной заслонки, которое преобразуется датчиком (не показан) в цифровой или электрический сигнал, преобразуется в заданную частоту вращения двигателя 40 путем сравнения положения дроссельной заслонки с прогнозируемым числом оборотов двигателя без нагрузки. Электронный блок управления 48 определяет положение дроссельной заслонки 38 , а затем оценивает частоту вращения двигателя без нагрузки. Связь между положением дроссельной заслонки 38 , а расчетное число оборотов двигателя без нагрузки обычно является нелинейным и определяется в программном модуле 50 профиля зависимости от числа оборотов (РИС. 2). Электронный блок управления 48 также учитывает скорость автомобиля 52 в дополнение к команде торможения 42 , рассмотренной выше.
Электронный блок управления 48 включает в себя блок расчета уставки (SPCB) 54 , который принимает заданную скорость двигателя 40 , команду торможения , 42, и скорость транспортного средства , 52, в качестве входных данных. SPCB 54 определяет состояние транспортного средства 56 , которое ускоряется или замедляется. Затем SPCB 54 использует алгоритм 58 (фиг. 2) для вычисления уставки 60 автомата перекоса на основе ситуации 56 транспортного средства. В случае разгона или торможения транспортного средства 56 уставка автомата перекоса 60 может быть изменена с помощью динамического линейного изменения во времени в SPCB 54 .
Если SPCB 54 определяет, что автомобиль 56 ускоряется, то электронный блок управления 48 также использует регулятор положения автомата перекоса 62 для определения уставки положения автомата перекоса 60 . Регулятор положения автомата перекоса 62 использует уставку 60 и фактическое положение автомата перекоса 64 для генерации сигнала для регулятора положения автомата перекоса 66 , который обеспечивает обратную связь с обратной связью по положению автомата перекоса. Регулятор положения автомата перекоса 62 использует частоту вращения двигателя 68 и команду торможения 42 в качестве входных данных и сравнивает их с заданным профилем оборотов двигателя и профилем заданного значения автомата перекоса. Когда задействованы тормоза, команда торможения 42 отменяет запрошенную уставку 60 для замедления автомобиля.
Если SPCB 54 определяет положение автомобиля 56 для замедления, то уставка автомата перекоса 60 основана на фактической скорости автомобиля 52 . В этой ситуации используется профиль уставки скорости автомобиля в зависимости от точки перекоса. Когда задействованы тормоза, команда торможения 42 отменяет запрошенную уставку 60 для замедления автомобиля.
Электронный блок управления 48 также включает в себя монитор нагрузки двигателя (ELM) 70 . ELM 70 принимает заданную скорость двигателя 40 , текущая частота вращения двигателя 68 и скорость автомобиля 52 в качестве входных данных для определения состояния нагрузки двигателя. Выход ELM 70 уменьшает исходную уставку 60 в случае чрезмерной нагрузки. ELM 60 также приводит к переключению на пониженную передачу при повторном ускорении. Благодаря ELM 60 частота вращения двигателя 68 увеличивается вместе со скоростью автомобиля 52 . Это создает желаемое ощущение в транспортном средстве, в результате чего оператор воспринимает скорость транспортного средства 52 увеличивается в зависимости от увеличения числа оборотов двигателя 68 .
Что касается фиг. 4 показан ручной режим 36 работы. Как и в автоматическом режиме, оператор регулирует положение дроссельной заслонки 38 для достижения желаемой заданной частоты вращения двигателя 40 . Кроме того, оператор может задействовать тормоза автомобиля 42 либо для замедления, либо для полной остановки автомобиля. Далее оператор настраивает регулятор выбора диапазона 44 для выбора диапазона коробки передач 46 условий, включая передний высокий, передний низкий, задний ход, нейтраль и парковку (РИС. 1). В ручном режиме оператор также регулирует селектор передач 72 , чтобы ограничить или установить передаточное число. Обычно существует от четырех до шести смоделированных передаточных чисел, из которых оператор может выбирать, выбирая условия переключения вверх 74 или переключения вниз 76 (фиг. 2).
Как и в автоматическом режиме, SPCB 54 принимает заданную скорость двигателя 40 , команду тормоза 42 и скорость автомобиля 52 в качестве входных данных. В ручном режиме SPCB 54 также принимает команду переключения передач 72 в качестве входных данных. SPCB 54 определяет состояние транспортного средства 56 , которое ускоряется или замедляется. Затем SPCB 54 использует алгоритм 58 (РИС. 2) для расчета уставки автомата перекоса 60 в зависимости от ситуации с транспортным средством 56 . Как при ускорении, так и при замедлении транспортного средства 56 уставка 60 автомата перекоса может быть изменена с помощью динамического линейного изменения во времени в SPCB 54 .
Если SPCB 54 определяет, что автомобиль 56 ускоряется, то электронный блок управления 48 использует частоту вращения двигателя 68 , команду торможения 42 и команду переключения передач 49 для расчета команды 49943. уставка автомата перекоса 60 . В этом случае используется профиль заданной частоты вращения двигателя в зависимости от заданного значения автомата перекоса. Когда задействованы тормоза, команда торможения 42 отменяет запрошенное заданное значение 60 , тем самым ограничивая максимальное передаточное отношение и скорость автомобиля.
Если SPCB 54 определяет, что автомобиль 56 замедляется, то электронный блок управления 48 использует фактическую скорость автомобиля 52 и команду переключения передач 72 для расчета уставки автомата перекоса 60 . В этом случае используется профиль скорости автомобиля в зависимости от заданного значения автомата перекоса. Когда задействованы тормоза, команда торможения 42 отменяет запрошенную уставку 60 для замедления автомобиля. Команда переключения передач 72 ограничивает уставку автомата перекоса 60 .
Электронный блок управления 48 также использует ELM 70 для определения состояния нагрузки двигателя. ВЯЗ 70 принимает заданную скорость двигателя 40 , текущую скорость двигателя 68 и скорость автомобиля 52 в качестве входных данных. Выходной сигнал ELM 70 уменьшает необработанную уставку 60 в случае чрезмерной нагрузки и приводит к переключению на пониженную передачу при повторном ускорении. Регулятор положения автомата перекоса 62 использует выходной сигнал ELM 70 , а также фактическое положение автомата перекоса 64 для генерации сигнала для регулятора положения автомата перекоса 66 (РИС. 2), который обеспечивает обратную связь по положению автомата перекоса с обратной связью.
В процессе эксплуатации электронная система управления коробкой передач 10 быстро реагирует на самые разные динамические характеристики автомобиля и условия эксплуатации. Электронная система управления коробкой передач 10 может работать от малой скорости до максимальной скорости автомобиля 52 , равной 90 км/ч. без изменения режима передачи.
Кроме того, устранение центробежного сцепления позволяет электронной системе управления коробкой передач 10 для достижения нулевой скорости автомобиля. HMT 12 может быть разработан для достижения нулевой выходной скорости за счет выбора и расположения планетарных передаточных чисел и размеров гидростатических компонентов. Затем устройство управления положением автомата перекоса 62 использует смещение нулевой скорости для подачи команды HMT 12 на нулевую скорость. Удержание нулевой скорости также может быть выполнено путем измерения скорости и направления рычага управления 30 планетарного ряда 32 (РИС. 1). Это дает преимущество перед центробежным сцеплением, поскольку электронная система управления коробкой передач 10 может удерживать автомобиль на нулевой скорости независимо от нагрузки даже на крутых склонах.
Поскольку в электронной системе управления трансмиссией 10 не используется центробежная муфта, система 10 не обладает присущими ей механическими или гидравлическими характеристиками, обеспечивающими плавный пуск. Условие плавного пуска достигается за счет использования динамической рампы на основе времени в SPCB 54 . В автоматическом режиме 34 электронная система управления коробкой передач 10 может обеспечить плавный запуск, используя динамическую рампу в зависимости от скорости автомобиля 52 . В ручном режиме 36 система управления 10 может обеспечить условия плавного запуска, используя короткую автомобильную кривую 78 в сочетании с фиксированным передаточным числом 80 , как показано на фиг. 5.
В другом варианте осуществления электронная система управления трансмиссией 10 может обеспечить плавный пуск за счет использования регулируемого перепускного клапана гидроконтура 82 (РИС. 1). Регулируемый перепускной клапан гидроконтура 82 соединяет две стороны контура гидростатической мощности 22 вместе только по команде. Эта взаимосвязь снижает способность передачи крутящего момента гидростатическими блоками и, следовательно, может помочь регулировать условия запуска транспортного средства. Перепускной клапан 82 может иметь бесступенчатую регулировку или работать по схеме «открыто-закрыто». Перепускной клапан 82 также можно использовать для быстрого снижения нагрузки на двигатель при срабатывании тормозов 42 . Это обеспечивает более плавное замедление и уменьшает пробуксовку и остановку двигателя при резком торможении. В качестве альтернативы, система управления 10 также может быть адаптирована для использования датчика тормоза (не показан), чтобы помочь предотвратить остановку во время резкого торможения. Такой датчик можно использовать для синхронизации ГМТ 12 с тормозами 42 во избежание конфликтов между ними.
Электронная система управления коробкой передач 10 также обеспечивает незначительное динамическое торможение двигателем. Некоторые двигатели 14 , особенно маломощные транспортные средства для отдыха и грузовые автомобили, имеют очень небольшую способность поглощать мощность во время замедления транспортного средства. Если передаточное отношение уменьшается слишком быстро, к двигателю 14 может быть приложен чрезмерный крутящий момент, что приведет к превышению скорости и повреждению. Поскольку SPCB 54 определяет положение транспортного средства 356 , система управления 10 распознает, когда транспортное средство замедляется.
