

Содержание
Контроллеры управления бесколлекторными электроприводами постоянного тока компании Apex Microtechnology
Введение
Электроприводы с цифровым микропроцессорным управлением применяются не только в станкостроении, роботизированных отраслях, но и в бытовой, медицинской технике, в автомобилестроении. Причина широкого использования электроприводов объясняется многими факторами. Во-первых, применение алгоритмов, запрограммированных на конкретные операции, позволяет значительно повысить производительность конечных устройств. Во-вторых, гибкость, достигаемая посредством изменения программы управления либо сменой датчиков. В-третьих, качество управления объектом улучшается, поскольку современные контроллеры управления позволяют реализовывать такие алгоритмы, как фаззи-логика, скользящие режимы. Точность и диапазон регулирования электроприводом повышается.
Развитие цифрового регулируемого электропривода обязано появлению силовой полупроводниковой техники. Появление контроллеров управления электроприводами позволило создавать преобразователи частоты для асинхронных электродвигателей, электроприводов с вентильными и вентильно-индукторными электродвигателями. Кроме того, использование контроллеров позволяет значительно сократить затраты на электроэнергию.
Кроме того, использование контроллеров позволяет значительно сократить затраты на электроэнергию.
Как вариант реализации управления электроприводом компания APEX Microtechnology предлагает использовать контроллеры управления серии BCxx, возможность применения которых в целях управления бесколлекторными электроприводами постоянного тока будет рассматриваться в данной статье. Компания APEX Microtechnology представляет уникальные решения для управления 3-фазными бесколлекторными электроприводами постоянного тока. Компанией выпускается три изделия данной категории (см. таблицу). Семейство устройств BC — контроллеров управления бесколлекторными электроприводами постоянного тока — обеспечивает полностью интегрированное решение 2- и 4-квадрантного управления. Мощности конечных устройств на базе данного контроллера (при их компактном размере) могут достигать 8,5 кВт.
Описание контроллера управления
Контроллер управления бесколлекторными электроприводами постоянного тока BCxx (xx — значение выходного постоянного тока в амперах) обеспечивает необходимые функции управления 3-фазными ДПТ в замкнутых или разомкнутых системах (рис.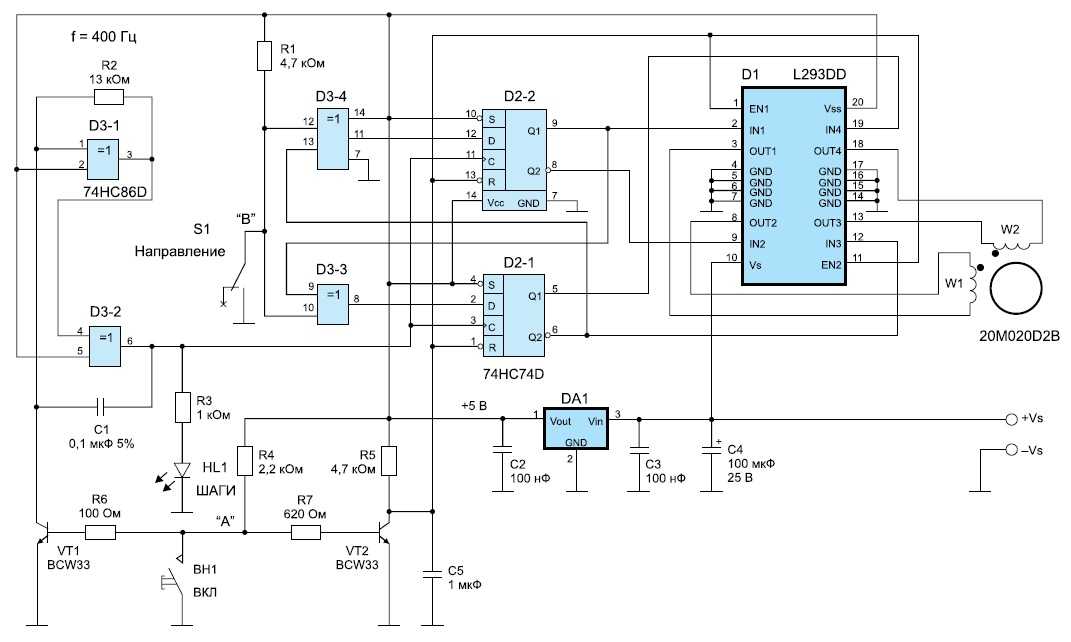 1). Контроллеры серии BC имеют 3-фазную мостовую схему с 2- или 4-квадрантной системой управления широтно-импульсной модуляцией (ШИМ) и выбираемой коммутацией 60° или 120°. BCxx способны управлять двигателями мощностью до 4,5 кВт.
1). Контроллеры серии BC имеют 3-фазную мостовую схему с 2- или 4-квадрантной системой управления широтно-импульсной модуляцией (ШИМ) и выбираемой коммутацией 60° или 120°. BCxx способны управлять двигателями мощностью до 4,5 кВт.
Рис. 1.
Контроллеры обеспечивают управление электроприводом, генерацию сигнала ШИМ, управление коммутацией, усиление рассогласования и контроль токового считывания обмотки двигателя.
Контроллер может осуществлять 4-квадрантное управление ШИМ для приложений, обеспечивающих продолжительный переход через нулевую скорость электродвигателя или 2-квадрантное управление ШИМ, которое благодаря своей экономичности больше подходит для реализации однонаправленного вращения. Однако во втором режиме существует возможность изменения направления движения ротора путем использования входа, обеспечивающего реверс. Таким образом, возможна реализация работы со сложными алгоритмами замедления даже при использовании 2-квадрантного управления.
2- и 4-квадрантное управление ШИМ
BCxx может быть сконфигурирован с помощью входной логики и действовать как контроллер управления, реализующий как 2-квадрантное, так и 4-квадрантное управление сигналом ШИМ. При 2-квадрантном управлении происходит захват одной фазы двигателя, при этом сигнал ШИМ запитывает положительной полярностью одну фазовую обмотку электродвигателя. При 4-квадрантном управлении ШИМ коммутируется две фазы двигателя. 4-квадрантное управление сигналами ШИМ имеет более широкое применение по сравнению с 2-квадрантным, особенно в таких случаях, как позиционное управление, фазовая синхронизация, скоростное управление, управление по сложному алгоритму.
При 2-квадрантном управлении происходит захват одной фазы двигателя, при этом сигнал ШИМ запитывает положительной полярностью одну фазовую обмотку электродвигателя. При 4-квадрантном управлении ШИМ коммутируется две фазы двигателя. 4-квадрантное управление сигналами ШИМ имеет более широкое применение по сравнению с 2-квадрантным, особенно в таких случаях, как позиционное управление, фазовая синхронизация, скоростное управление, управление по сложному алгоритму.
Схемы защиты контроллера управления
Контроллер имеет четыре схемы защиты, необходимые для его надежной работы при различного рода нежелательных ситуациях:
- схема обнаружения пикового значения тока, которая запрограммирована на значение датчика тока, размещенного между ДМОП-источниками и обратным выходом высокого напряжения;
- схема защиты от перегрева, функции которой заключаются в прерывании работы контроллера управления при перегреве и возобновлении ее только после достаточного охлаждения до рабочей температуры;
- схема защиты от сверхтоков, прекращающая работу контроллера управления при превышении тока силового источника напряжения примерно в 1,5 раза пикового значения тока;
- обрыв цепи при обесточивании контроллера.


Пример схемной реализации на основе контроллера BC20
Ранее было оговорено, что в зависимости от вида управления ШИМ могут быть реализованы различные схемы управления электроприводом. Ниже приводится пример использования контроллера при реализации скоростного управления электроприводом в замкнутой системе, сигналы ШИМ которого использует 4-квадрантный режим управления.
Рассмотрим подробнее работу схемы (рис. 2).
Рис. 2.
Номинальное рабочее напряжение микросхемы, подаваемое на вход Vcc, составляет 15 В. На вход OE должен быть подан логически активный сигнал для разрешения работы контроллера. В начале статьи оговаривалось, что скоростной режим управления двигателем рационально реализовывать при 4-квадрантном режиме управления, чтобы обеспечивать возможность остановки ротора электропривода. Поэтому на вход 2Q, который указывает режим управления сигналами ШИМ, подается логически пассивный сигнал, то есть реализуется 4-квадрантный режим. Вход управления реверсом REV при 4-квадрантном режиме остается пассивным. Угол коммутации фаз двигателя задается логически активным сигналом, подаваемым на вход 120. В данном случае шаг ротора при каждой коммутации будет равен 120°. Выход FAULT микросхемы сообщает о нарушении работы схемы подключенным к нему световым индикатором.
Вход управления реверсом REV при 4-квадрантном режиме остается пассивным. Угол коммутации фаз двигателя задается логически активным сигналом, подаваемым на вход 120. В данном случае шаг ротора при каждой коммутации будет равен 120°. Выход FAULT микросхемы сообщает о нарушении работы схемы подключенным к нему световым индикатором.
Сигналы с датчиков Холла, установленных на двигателе, подаются на входы контроллера HS1 — HS3. За изменением уровня сигнала датчиков Холла следит выход SSC. Важно правильно подключить датчики Холла к выводам микросхемы, иначе ротор двигателя может либо двигаться в обратном направлении, либо сильно колебаться, либо вообще не двигаться. На вход REF_IN подается аналоговый управляющий сигнал, а на вход FB — сигнал с тахогенератора. С выхода MOTOR_I на вход TORQ подается аналоговое напряжение, пропорциональное току электродвигателя. Тем самым эти выводы, соединенные между собой через резистор, образуют замкнутый контур тока. Резистор стабилизирует коэффициент передачи. С выходов OUT1 — OUT3 происходит управление фазовыми обмотками двигателя. Входы-выходы S1 — S3 необходимы для замыкания рабочего контура двигателя и отслеживания значения тока при защите контроллера от сверхтоков.
С выходов OUT1 — OUT3 происходит управление фазовыми обмотками двигателя. Входы-выходы S1 — S3 необходимы для замыкания рабочего контура двигателя и отслеживания значения тока при защите контроллера от сверхтоков.
Для работы схем защиты используется вход HVRTN. Питание электродвигателя осуществляется через вход HV.
Преимущества гибридного исполнения
Контроллеры управления серии BCxx выполнены по гибридной технологии, которая позволяет относительно быстро создавать электронные устройства, выполняющие достаточно сложные функции. С использованием гибридной технологии созданы и другие продукты, такие, как ШИМ-усилители и линейные операционные усилители.
Использование уникальных технологий способствует созданию качественных продуктов. Гибридная технология сборки значительно увеличивает рассеиваемую мощность устройств при их компактном размере. Например, контроллер управления BC20 с габаритными размерами 112x51x12 мм (рис.3) обладает внутренней рассеиваемой мощностью 480 Вт, что позволяет ему управлять двигателями мощностью до 4,5 кВт. Технологии производства компании Apex повышают надежность создаваемых устройств, которые могут работать в жестких условиях окружающей среды. Гибридная технология сборки устройств значительно повысила диапазон рабочих температур (-40…+85 °С).
Технологии производства компании Apex повышают надежность создаваемых устройств, которые могут работать в жестких условиях окружающей среды. Гибридная технология сборки устройств значительно повысила диапазон рабочих температур (-40…+85 °С).
Рис. 3.
Заключение
Изделия на базе контроллера управления бесколлекторным электроприводом постоянного тока BCxx могут применяться в самом широком спектре высокопроизводительного промышленного автоматизированного оборудования, такого, как автоматические производственные линии, удаленные системы управления, роботы-манипуляторы и другие прецизионные устройства с электроприводом.
Также хотелось бы добавить, что компоненты компании Apex являются высокофункциональными устройствами, обладают уникальными техническими характеристиками и разработаны для применений в жестких условиях внешней среды. Многие из компонентов Apex дают возможность найти решение там, где другие варианты либо дорогостоящи и экономически нецелесообразны, либо вообще невозможны.
Компания Apex Microtechnology предлагает решения, упрощающие проектирование устройств и одновременно повышающие их надежность. Использование ее контроллеров существенно облегчает реализацию системы управления электроприводом и позволяет значительно снизить количество компонентов в схеме, тем самым сократив время разработки и тестирования.
Литература
- PWM amplifiers, power amplifiers, motion control. Power Integrated circuit data book. Volume 11. Apex Microtechnology.
Управление современным электроприводом с персонального компьютера
Вершиной комплекса средств автоматизации, как правило, является SCADA-система — программный комплекс, установленный на персональном компьютере (ПК) для решения задач мониторинга состояния и управления каким-либо объектом, а в некоторых случаях и набор средств для упрощенной разработки таких комплексов. Взаимодействие с исполнительной и сенсорной частью объекта управления технической системы осуществляется через специализированные промышленные контроллеры и платы расширения. Электропривод, пожалуй, является наиболее распространенным компонентом исполнительной части объекта управления, поэтому задача управления приводом с персонального компьютера встает перед разработчиком средств автоматизации особенно часто. Рассмотрим несколько основных вариантов для организации управления приводом с ПК.
Электропривод, пожалуй, является наиболее распространенным компонентом исполнительной части объекта управления, поэтому задача управления приводом с персонального компьютера встает перед разработчиком средств автоматизации особенно часто. Рассмотрим несколько основных вариантов для организации управления приводом с ПК.
Специализированные решения на базе OPC-серверов
OPC (OLE for Process Control, где OLE — Object Linking and Embedding) — набор стандартов, описывающих универсальный фиксированный интерфейс обмена данными с промышленными устройствами. Использование OPC позволяет работать с оборудованием не на уровне конкретного протокола или драйвера устройства, а на уровне фиксированного и описанного в стандарте набора функций. Это позволяет, например, заменить оборудование без изменения программного обеспечения (ПО) — главное, чтобы новое оборудование поддерживало соответствующую версию OPC. Конкретная реализация протокола или драйвера устройства в данном случае не важна, так как задача преобразования команд OPC в непосредственную работу с устройством решается с помощью OPC-драйвера, предоставляемого компанией — производителем устройства в случае поддержки данного стандарта.
Примером системы с поддержкой стандарта OPC могут служить решения компании Siemens на базе WinCC-сервера. В качестве SCADA-системы предлагается Simatic WinCC, в качестве OPC-сервера — WinCC-Server для операционных систем (ОС) Windows. Система позволяет решить задачи мониторинга и управления, а также реализовать возможность визуализации техпроцесса, используя специальный редактор.
Хотя большинство современных SCADA-систем являются клиентом какой-либо версии OPC, со стороны оборудования ситуация не такая радужная: зачастую производители ограничиваются разработкой драйвера или поддержкой определенного протокола и не решают задачу организации управления через стандартные функции OPC. Особенно это характерно для бюджетных решений.
Таким образом, несмотря на очевидные плюсы управления приводом через OPC с точки зрения архитектуры и стандартизации, у данного подхода есть свои минусы с потребительской точки зрения:
- Оборудование с поддержкой стандарта обычно дорогое, цена может отличаться на порядок в сравнении с оборудованием бюджетного сегмента.
- ПО (SCADA-система, OPC-сервер и отдельно драйверы к каждому устройству), как правило, нужно покупать отдельно, при этом стоимость одного компонента может достигать нескольких тысяч евро. Стоимость одного только ПО может превысить стоимость набора бюджетных решений в несколько раз.
- Решение отличается сложностью. Необходимо поставить специализированный сервер, обеспечить все необходимые интерфейсы. Из-за сложности решения, несмотря на его высокую стоимость, нередко возникают различного рода проблемы с конфигурированием и настройкой, а иногда и со стабильностью в работе (автор сталкивался, например, с потерей связи между устройствами, которая «лечится» перегрузкой). В случае, когда необходимо управлять всего лишь несколькими двигателями и снимать показания с группы датчиков, развертывание полноценного решения на базе OPC может быть неоправданно.

Решение на базе реализации протокола, поддерживаемого конкретным устройством
Одним из наиболее часто используемых вариантов (и, зачастую, единственно возможным) при организации управления служит реализация на ПК протокола, используемого контроллером привода. Как правило, производитель старается использовать стандартные промышленные протоколы, такие как CANopen, Device NET (шина CAN), Modbus (линии связи с последовательной передачей данных RS-485, RS-422, RS-232, Ethernet), Profibus (RS-485, оптическая сеть). В этом случае задача сопряжения привода с ПК сводится к трем подзадачам:
Как правило, производитель старается использовать стандартные промышленные протоколы, такие как CANopen, Device NET (шина CAN), Modbus (линии связи с последовательной передачей данных RS-485, RS-422, RS-232, Ethernet), Profibus (RS-485, оптическая сеть). В этом случае задача сопряжения привода с ПК сводится к трем подзадачам:
Сопряжение с ПК на уровне интерфейса. Данная задача решается покупкой соответствующего преобразователя интерфейса в виде платы расширения или отдельного устройства.
Реализация на стороне ПК протокола обмена устройства. Решение этой задачи облегчается тем, что, как правило, для всех популярных промышленных протоколов существуют готовые реализации. Это существенно упрощает задачу. Например, реализация протокола Modbus в виде бесплатных бибилиотек OsmModbusController или LibModbus.
Реализации высокоуровневых команд. Как правило, промышленный привод управляется через запись значений в регистры контролера. Соответствие адресов регистров функциям контроллера (так называемая карта регистров) обычно описано в документации на контроллер. Функции при этом обычно низкоуровневые, поэтому для удобства работы их необходимо сгруппировать в функции более высокого уровня.
Функции при этом обычно низкоуровневые, поэтому для удобства работы их необходимо сгруппировать в функции более высокого уровня.
Решение на базе SDK, поставляемого производителем
В случае, когда производитель озаботился выпуском SDK (Software Development Kit) для организации управления приводом (либо другим устройством), задача интеграции с ПО решается проще и дешевле — SDK обычно прилагается к оборудованию бесплатно, чтобы побудить разработчиков использовать данную платформу. Как правило, такие SDK содержат высокоуровневые функции управления. В качестве примера рассмотрим бесплатный SDK для контроллеров шаговых двигателей семейства OSM производства Onitex, который работает поверх промышленного протокола Modbus RTU.
Данные контроллеры могут общаться с ПК посредством интерфейсов USB, RS-232 либо RS-485. В случае использования RS-485 контроллеры могут быть объединены в сеть до 32 устройств. Для управления с ПК в этом случае применяется преобразователь интерфейсов, например USB<–>RS-485.
SDK рассчитан на работу в среде .NET, работает под ОС Windows, Linux и MacOS, а также полностью совместим со средой разработки и выполнения программ LabView, часто используемой в лабораториях. Все управляющие команды перечислены в документации и позволяют полностью контролировать работу электропривода в реальном времени:
- Контроль скорости: стартовая, конечная, требуемая скорость, ускорение/замедление, количество шагов ускорения/замедления, обновляемые в реальном времени данные о текущей скорости.
- Контроль положения: текущая позиция по внутреннему счетчику, установка конечной позиции, текущая позиция по данным энкодера (при режиме работы с энкодером).
- Смена направления вращения «на лету».
- Контроль тока.
- Контроль времени перехода в спящий режим и установка значения тока в спящем режиме.
- Установка режимов микрошага: смена режима микрошага «на лету».
- Установка ограничений на число шагов в командах движения.
- Работа со входами и выходами устройства: счетчик по прерываниям на входе EN (возможно чтение значения счетчиков из программы), раздельная установка разрешений прерываний по входам.
- Управление сменой режимов входов. Например, для входа в реверс: режим смены направления вращения по сигналу, режим счетчика прерываний, режим счетчика с защитой от дребезга контактов, режим энкодера.

При этом не нужно разбираться с тонкостями работы с протоколом и записывать информацию непосредственно в регистры устройства. Иными словами, все команды являются высокоуровневыми. К примеру, чтобы изменить скорость вращения шагового двигателя, при использовании SDK можно вызвать простую функцию вида:
public void SetSpeed (byte slaveAddress, ushort speed),
где slaveAddress — адрес конкретного устройства, speed — скорость в герцах.
Таким образом, конечному пользователю совершенно необязательно вникать не только в реализацию протокола, по которому происходит передача данных, но и в струк-туру регистров самого устройства. Необходимо лишь выполнить физическое соединение устройства с компьютером посредством интерфейса USB, RS-232 или RS-485 и подключить SDK к своему проекту.
Использование SDK производителя имеет также свои минусы:
- привязка к конкретному поставщику оборудования;
- необходимость использования языка программирования, выбранного поставщиком, либо привязки к этому языку.
Решение на базе специализированного программного обеспечения для станков с ЧПУ
Часто задача управления приводом с ПК является частью более общей задачи — управление с ПК станком с числовым программным управлением (ЧПУ). В этом случае оправданно использование специализированных программных решений для станков с ЧПУ. Например, для управления приводами координатного стола в качестве бюджетного решения подходит такое ПО, как Mach4 (также работает с токарным станком), AlfaCAM, KCam. Движение приводов в этом ПО задается с помощью языка G-code, в котором записаны все параметры движения приводов. Как правило, G-code не пишутся вручную, а генерируются управляющим ПО по двух- или трехмерной модели изделия, которое необходимо изготовить. Также такое ПО может управлять дополнительным оборудованием через реле. Для cвязи контроллеров приводов с ПК применяются специальные платы расширения, такие как MC4.
Также такое ПО может управлять дополнительным оборудованием через реле. Для cвязи контроллеров приводов с ПК применяются специальные платы расширения, такие как MC4.
Для управления техпроцессом, в котором важна определенная последовательность операций, включающая в себя движение с заданным ускорением, движение до срабатывания определенного датчика, синхронное вращение двигателей, управление выходами контроллеров для включения различных устройств через реле и т. д. (например, станок для изготовления изделий из проволоки, конвейер), также существует специализированное ПО, к примеру WireBender.
В WireBender последовательность выполняемых операций задается вручную, с помощью простых текстовых команд, например: двигатель «a»: направо на 3000 шагов, разгон c ускорением 3000 шаг/с2, остановка с замедлением 2000 шаг/с2, скорость 2500 шаг/с:
a:6000 ac:3000 dc:2000 sd:2500.
Двигатель «b»: направо до срабатывания датчика на входе in1, но не более 1000 шагов, ускорение 5000 шаг/с2, скорость 2500 шаг/с:
b:in1<1000 ac:5000 sd:2500.
Управление приводами в этом случае осуществляется через интерфейс RS-485.
* * *
Таким образом, каждая концепция решений для управления приводами является неким компромиссом между удобством использования, стоимостью решения, масштабируемостью, спектром решаемых задач и функциональностью. На наш взгляд, для небольших проектов, ограниченных двумя-тремя десятками приводов в одной сети, хорошим выбором будет использование решений с поставляемым производителем SDK, так как это существенно снижает стоимость решения и сокращает время разработки, ведь производитель уже реализовал львиную долю функциональности, связанной с протоколом обмена и управления конкретным приводом. В случае же, когда задача управления приводом является подзадачей управления каким-либо станком, стоит присмотреться к специализированным решениям — возможно, нужное ПО уже написано. А для задач мониторинга и управления крупным комплексом инженерных сооружений хорошо подходят решения на базе OPC-серверов.
Типы контроллеров двигателей и приводов
Контроллеры двигателей и приводы представляют собой электрические или электронные устройства, которые регулируют скорость двигателя, крутящий момент и выходное положение. Привод изменяет мощность, подводимую к двигателю, для достижения желаемой выходной мощности. Схемы контроллера обычно интегрируются со схемами привода как один автономный блок, поэтому термины «привод двигателя» и «контроллер двигателя» часто используются как синонимы. Существует четыре основных типа контроллеров двигателей и приводов: переменного тока, постоянного тока, сервопривод и шаговый двигатель, каждый из которых имеет тип входной мощности, модифицированный для желаемой выходной функции в соответствии с приложением.
Слева направо: серводвигатель переменного тока, бесщеточный двигатель постоянного тока и шаговый двигатель.
Изображение предоставлено: similis/Shutterstock.com
Видео
 youtube.com/embed/kF9cH9fc_9U» frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/kF9cH9fc_9U» frameborder=»0″ allowfullscreen=»»>
Типы контроллера двигателя и привода
АС
Контроллеры и приводы двигателей переменного тока
— это электронные устройства, которые изменяют входную мощность двигателей, обычно регулируя частоту питания двигателя с целью регулирования выходной скорости и крутящего момента. Ключевые характеристики включают предполагаемое применение, режим работы привода, тип двигателя, тип инвертора, классификацию напряжения контура, номинальную мощность, интерфейс связи, а также входные и выходные электрические характеристики.
Контроллеры и приводы двигателей переменного тока
используются в основном в технологических процессах для управления скоростью насосов, вентиляторов, воздуходувок и т. д. Они известны как приводы с регулируемой скоростью, приводы с регулируемой частотой или инверторы переменного тока. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод.
DC
Контроллеры и приводы двигателей постоянного тока
— это электрические устройства, которые изменяют входную мощность путем преобразования источника постоянного или переменного тока в импульсный, постоянный ток на выходе с переменной длительностью импульса или частотой. Ключевые характеристики включают предполагаемое применение, режим работы привода, тип двигателя, контурную систему, классификацию напряжения, номинальную мощность, тип выходного сигнала, интерфейс связи, а также входные и выходные электрические характеристики. Контроллеры двигателей постоянного тока и приводы используются в основном для управления скоростью и крутящим моментом двигателей станков, электромобилей, насосов и т. д. Контроллер, обычно интегрированный с цепями привода, подает управляющие сигналы на привод.
Серводвигатель
Контроллеры и приводы серводвигателей
— это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный выходной ток с переменной длительностью импульса или частотой. Ключевые характеристики включают предполагаемое применение, тип двигателя, режим работы привода, контурную систему, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики. Контроллеры серводвигателей и приводы используются в основном в приложениях управления движением в производственной и строительной среде, среди прочего, и используются для управления скоростью, крутящим моментом и положением двигателя и могут приводиться в действие переменным или постоянным током. Серводвигатели используются во многих приложениях, включая станки, микропозиционирование и робототехнику, среди многих других типов машин, таких как конвейеры или системы привода шпинделя. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод. Сервоприводы также известны как сервоусилители.
Ключевые характеристики включают предполагаемое применение, тип двигателя, режим работы привода, контурную систему, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики. Контроллеры серводвигателей и приводы используются в основном в приложениях управления движением в производственной и строительной среде, среди прочего, и используются для управления скоростью, крутящим моментом и положением двигателя и могут приводиться в действие переменным или постоянным током. Серводвигатели используются во многих приложениях, включая станки, микропозиционирование и робототехнику, среди многих других типов машин, таких как конвейеры или системы привода шпинделя. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод. Сервоприводы также известны как сервоусилители.
Шаговый двигатель
Контроллеры и приводы шаговых двигателей
— это электронные устройства, которые изменяют входную мощность путем настройки источника постоянного или переменного тока на импульсный или «ступенчатый» выходной ток.
Основные характеристики включают предполагаемое применение, тип двигателя, режим работы привода, контурную систему, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики.
Контроллеры и приводы шаговых двигателей используются в основном в приложениях управления движением в производственной и строительной среде, среди прочего, и используются для управления скоростью, крутящим моментом и положением двигателя. Они используются во многих приложениях, включая станки, микропозиционирование и робототехнику, среди многих других типов машин, таких как конвейеры или OEM-оборудование. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод. Шаговые приводы также известны как импульсные приводы и шаговые усилители. Шаговые контроллеры также известны как индексаторы двигателей.
Контроллеры двигателей и приводы — приложения и отрасли
В отличие от серводвигателей и шаговых двигателей, для большинства двигателей переменного и постоянного тока не требуются контроллеры или приводы, кроме простейших пускателей двигателей и аналогичных защитных устройств. Приводы с двигателем переменного тока используются, когда желательно управление скоростью двигателя переменного тока, поскольку управление скоростью в асинхронном двигателе переменного тока обычно не выполняется — после того, как двигатель определен (по количеству полюсов), рабочая скорость указана на паспортной табличке. С другой стороны, щеточные двигатели постоянного тока принципиально регулируются скоростью, просто изменяя напряжение, подаваемое на ротор двигателя и поле. Этого можно добиться с помощью простого реостата; нет необходимости в контроллере или приводе. Новые бесщеточные двигатели постоянного тока не коммутируются механически, и поэтому требуются контроллеры и приводы для электронной коммутации магнитного поля. Серводвигатели и шаговые двигатели, поскольку они являются устройствами позиционирования, в отличие от машин вращательного движения, также требуют контроллеров и драйверов для своей работы.
Приводы с двигателем переменного тока используются, когда желательно управление скоростью двигателя переменного тока, поскольку управление скоростью в асинхронном двигателе переменного тока обычно не выполняется — после того, как двигатель определен (по количеству полюсов), рабочая скорость указана на паспортной табличке. С другой стороны, щеточные двигатели постоянного тока принципиально регулируются скоростью, просто изменяя напряжение, подаваемое на ротор двигателя и поле. Этого можно добиться с помощью простого реостата; нет необходимости в контроллере или приводе. Новые бесщеточные двигатели постоянного тока не коммутируются механически, и поэтому требуются контроллеры и приводы для электронной коммутации магнитного поля. Серводвигатели и шаговые двигатели, поскольку они являются устройствами позиционирования, в отличие от машин вращательного движения, также требуют контроллеров и драйверов для своей работы.
Приводы двигателей переменного тока
используются для управления скоростью двигателей, приводящих в действие насосы, вентиляторы и т. д., где в противном случае для дросселирования потока могли бы использоваться традиционные клапаны или заслонки. Приводы двигателей переменного тока используются для повышения эффективности путем настройки скорости насоса, вентилятора и т. д. в точном соответствии с требованиями.
д., где в противном случае для дросселирования потока могли бы использоваться традиционные клапаны или заслонки. Приводы двигателей переменного тока используются для повышения эффективности путем настройки скорости насоса, вентилятора и т. д. в точном соответствии с требованиями.
Приводы двигателей постоянного тока
используются для управления двигателями постоянного тока с постоянными магнитами, работающими от источников переменного тока. Двигатели постоянного тока имеют очень хороший крутящий момент на низких скоростях, что делает их особенно подходящими для лебедок, кранов и т. д., где необходимо поднимать грузы без «разбега». До появления электронных средств управления постоянным током двигатели постоянного тока мы часто соединяли как мотор-генераторы для выработки постоянного тока через асинхронные двигатели переменного тока.
Контроллеры серводвигателей и приводы полагаются на обратную связь от серводвигателей для управления положением, скоростью, ускорением и т. д. Производители серводвигателей обычно поставляют приводы, которые работают с их двигателями. Хотя степперам не требуется петля обратной связи, некоторые используют ее. Производители шаговых двигателей также обычно поставляют приводы для своих двигателей. Большинство производителей сервоприводов и шаговых двигателей предоставляют таблицы в качестве руководства по тому, какие двигатели будут работать с какими приводами.
д. Производители серводвигателей обычно поставляют приводы, которые работают с их двигателями. Хотя степперам не требуется петля обратной связи, некоторые используют ее. Производители шаговых двигателей также обычно поставляют приводы для своих двигателей. Большинство производителей сервоприводов и шаговых двигателей предоставляют таблицы в качестве руководства по тому, какие двигатели будут работать с какими приводами.
Соображения
Выбор контроллеров двигателей и приводов начинается со знания типа двигателя. Затем соответствующие подкатегории согласуются с этой базовой информацией.
Решение об использовании приводов переменного тока для асинхронных двигателей часто является экономическим решением, основанным на рабочих характеристиках конкретных установок: как часто насос или вентилятор работает с дроссельными клапанами или воздуховодами с жалюзи. По крайней мере, один производитель предлагает калькулятор (см. ниже), помогающий определить энергосбережение приводов переменного тока на основе конкретных сценариев эксплуатации. Двигатели, предназначенные для использования с приводами с регулируемой скоростью, обычно рассчитаны на работу с инвертором.
Двигатели, предназначенные для использования с приводами с регулируемой скоростью, обычно рассчитаны на работу с инвертором.
Другим соображением, касающимся приводов переменного тока, является характер применения, при этом постоянный крутящий момент и переменный крутящий момент являются основными подразделениями. Для приложений с переменным крутящим моментом, таких как центробежные вентиляторы, требования к крутящему моменту зависят от скорости двигателя. Для приложений с постоянным крутящим моментом, таких как конвейеры, требования к крутящему моменту одинаковы независимо от скорости двигателя. Приводы переменного тока обычно предназначены для приложений с переменной или постоянной скоростью.
Коллекторные двигатели постоянного тока, работающие от переменного тока, обычно приводятся в действие с помощью тиристорных мостовых выпрямителей, которые пропускают переменный ток к двигателю только в одном направлении, имитируя источник питания постоянного тока. Дополнительную информацию можно найти в приведенных ниже ссылках. Такие поставщики, как Baldor, обеспечивают управление постоянным током для односторонних и рекуперативных приложений для двигателей постоянного тока мощностью до 5 л.с., а через свою материнскую компанию (ABB) предлагают приводы постоянного тока мощностью до 3000 л.с. Односторонние приводы обычно требуют тормоза для остановки двигателя, в то время как рекуперативные приводы могут вращать двигатель в любом направлении и, таким образом, обеспечивают тормозную силу за счет реверса. Генерируемая мощность обычно отводится через реверсивные резисторы.
Такие поставщики, как Baldor, обеспечивают управление постоянным током для односторонних и рекуперативных приложений для двигателей постоянного тока мощностью до 5 л.с., а через свою материнскую компанию (ABB) предлагают приводы постоянного тока мощностью до 3000 л.с. Односторонние приводы обычно требуют тормоза для остановки двигателя, в то время как рекуперативные приводы могут вращать двигатель в любом направлении и, таким образом, обеспечивают тормозную силу за счет реверса. Генерируемая мощность обычно отводится через реверсивные резисторы.
Коллекторные двигатели постоянного тока, работающие от систем постоянного тока, таких как электрические тележки для поддонов, также используют элементы управления для изменения скорости и направления. Бесщеточные двигатели постоянного тока или двигатели с постоянными магнитами также требуют контроллеров для электронной коммутации их магнитных полей.
Серводвигатели
могут быть переменного или постоянного тока, с постоянным током доступны как щеточные, так и бесщеточные типы. Во всех случаях они требуют контроля, потому что они являются устройствами обратной связи. Линейные двигатели, как правило, основаны на сервоприводах и также требуют управления.
Во всех случаях они требуют контроля, потому что они являются устройствами обратной связи. Линейные двигатели, как правило, основаны на сервоприводах и также требуют управления.
Шаговые двигатели, как правило, не требуют обратной связи, но при включении должны быть «возвращены в исходное положение», чтобы двигатель знал, где он находится. Оттуда он считает шаги, чтобы отслеживать позицию. Некоторые шаговые двигатели подключают свои приводы непосредственно к раме двигателя.
Важные атрибуты
Полупроводниковое устройство
Вообще говоря, IGBT и SCR используются для устройств среднего и высокого напряжения, в то время как MOSFET используются в приложениях с низким энергопотреблением.
Вход двигателя, фаза
Двигатели обычно представляют собой однофазные или трехфазные машины в зависимости от фазы переменного тока, который их питает. Шаговые двигатели являются исключением в этом отношении, потому что фаза относится к архитектуре самого шагового двигателя, обычно описываемого как двух- или пятифазный. У Oriental Motors есть хорошая статья, в которой обсуждается разница, приведенная ниже.
У Oriental Motors есть хорошая статья, в которой обсуждается разница, приведенная ниже.
Корпуса
Электрошкафы
соответствуют критериям NEMA или IEC для защиты от проникновения пыли и окружающей среды.
Режим работы привода
Как обсуждалось выше, приводы переменного тока обычно рассчитаны либо на постоянный, либо на переменный крутящий момент в зависимости от применения.
Ресурсы
- Торговая группа http://www.smma.org/index.htm
- Торговая группа http://www.motioncontrolonline.org/i4a/pages/index.cfm?pageid=3283
- Калькулятор энергосбережения насосов и вентиляторов для оценки приводов переменного тока с регулируемой скоростью http://www.rockwellenergycalc.com/
- Техническое обсуждение двигателей и приводов постоянного тока http://cmsapps.sea.siemens.com
- Сравнение двухфазных и пятифазных шаговых двигателей http://www. orientalmotor.com/technology/articles/2phase-v-5phase.html
- Руководство по приводным системам https://www.barbourstockwell.com/capabilities/drive-systems/
 orientalmotor.com/technology/articles/2phase-v-5phase.html
orientalmotor.com/technology/articles/2phase-v-5phase.htmlСвязанные категории товаров
- Двигатели см. в нашем Руководстве по покупке двигателей.
- Пускатели двигателей см. в нашем Руководстве по покупке пускателей двигателей.
Другие товары для двигателей
- Все о синхронных двигателях — что это такое и как они работают
- Понимание двигателей
- — как они работают?
- Что такое двигатель с короткозамкнутым ротором и как он работает?
- Что такое двигатель с фазным ротором и как он работает?
- Все о реактивных двигателях — что это такое и как они работают
- Все о бесщеточных двигателях постоянного тока — что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- Синхронные двигатели и асинхронные двигатели — в чем разница?
- и щеточные двигатели — в чем разница?
- Кто изобрел паровой двигатель? Урок промышленной истории
- Все о двигателях с электронным управлением — что это такое и как они работают
- и серводвигатели — в чем разница?
- и двигатели постоянного тока — в чем разница?
- Все о контроллерах серводвигателей — что это такое и как они работают
Однофазные промышленные двигатели
Шаговые двигатели
Бесщеточные двигатели
Двигатели постоянного тока
Шаговые двигатели
Прочие «Типы» изделий
- Антикоррозионные покрытия для различных типов коррозии
- Четыре типа сканеров штрих-кода
- Петля для шкафа — типы и варианты дверных петель для шкафа
- Типы термопар и диапазон термопар
- Для чего используется конденсатор? Переменные типы/функции конденсаторов
- Виды пиломатериалов
- Что такое париленовое покрытие? Взгляд на различные типы парилена
- Различные типы датчиков и их использование (например, электрические датчики)
- Гармонический осциллятор и другие типы осцилляторов
- Типы систем промышленной автоматизации
- Типы уплотнительных колец и состав материала уплотнительных колец — Руководство
- Типы инженерных услуг по анализу отказов — Руководство для покупателей ThomasNet
- Типы процессов литья под давлением
- Механические манометры: подробный обзор различных типов манометров
- Типы разъемов электропитания
- Типы зажимов: их применение и отрасли — Руководство для покупателей ThomasNet
- Типы формовочного оборудования — Руководство для покупателей ThomasNet
- Типы медицинских клеев — Руководство для покупателей ThomasNet
- Типы клеев, чувствительных к давлению
- Типы строительных лесов
Еще из раздела Инструменты и элементы управления
Приводы/контроллеры — Unico
Главная >Продукция > Приводы/контроллеры
Приводы/контроллеры
Ознакомьтесь с ассортиментом наших приводов и контроллеров, которые используются для измерения, тестирования и повышения производительности ваших машин.
Стандартные диски |
Семейство модульных высокопроизводительных дисков |
Сверхвысокопроизводительные диски из карбида кремния (SiC) | Системные контроллеры
Стандартные приводы
Наши стандартные приводы представляют собой передовые решения для высокопроизводительных испытаний и все более сложных систем управления и автоматизации. Приводы предназначены для широкого спектра применений, включая испытательные стенды, металлообработку, переработку бумаги, насосные системы, обработку рулонов.
1100 Привод переменного тока с переменной частотой
Преобразователь 1100 обеспечивает надежное, эффективное, экономичное управление с переменной частотой (В/Гц) или векторным потоком трех обычных
Читать далее
1105 Привод переменного тока с переменной частотой
Преобразователь 1105 обеспечивает надежное, эффективное и экономичное управление переменной частотой (В/Гц) или векторным управлением потоком трех обычных
Читать далее
1110 Фазопреобразующий привод переменного тока
Привод 1110 обеспечивает надежное, эффективное и экономичное управление переменной частотой (В/Гц) или векторным управлением потоком трех обычных
Читать далее
1201 Преобразователь частоты переменного тока
Привод 1201 обеспечивает надежное, эффективное и экономичное управление переменной частотой (В/Гц) или векторным управлением потоком широкого спектра
Читать далее
1230 Линейно-регенеративный привод переменного тока
Контроллер 1230 обеспечивает надежное, эффективное и экономичное управление с переменной частотой (В/Гц) или векторным управлением потоком в широком диапазоне
Читать далее
500 Преобразователь частоты переменного тока
Преобразователи частоты серии 500 обеспечивают как частотное (В/Гц), так и бездатчиковое или векторное управление с обратной связью
Читать далее
Семейство модульных высокопроизводительных приводов
Воспользуйтесь преимуществами наших модульных приводных решений. Эти накопители предназначены для удовлетворения широкого спектра требований к производительности, будь то компактные предварительно спроектированные системы или даже комплексные решения, разработанные по индивидуальному заказу. Вы сможете повысить общую операционную эффективность, рентабельность и снизить общую стоимость владения.
Эти накопители предназначены для удовлетворения широкого спектра требований к производительности, будь то компактные предварительно спроектированные системы или даже комплексные решения, разработанные по индивидуальному заказу. Вы сможете повысить общую операционную эффективность, рентабельность и снизить общую стоимость владения.
Высокопроизводительный модульный системный преобразователь 2400
2400 — это полностью цифровой инвертор с широтно-импульсной модуляцией (ШИМ), который обеспечивает превосходное управление трехфазными двигателями переменного тока
Читать далее
2420 Интегрированный преобразователь частоты переменного тока
2420 — полностью цифровой привод переменного тока с широтно-импульсной модуляцией (ШИМ), который обеспечивает превосходное управление трехфазными двигателями переменного тока
Читать далее
Модульный высокопроизводительный привод постоянного тока 2450
Модель 2450 представляет собой полностью цифровой привод постоянного тока с широтно-импульсной модуляцией (ШИМ). Его революционная технология и модульная конструкция делают это.
Читать далее
Ультравысокопроизводительные приводы из карбида кремния (SiC)
Наши сверхвысокопроизводительные приводы из карбида кремния (SiC) позволяют тестировать и разрабатывать технологии электродвигателей следующего поколения. В системе используются транзисторы типа SiC MOSFET для создания сигналов переменного тока с гораздо более высокими основными частотами. Инженеры-электромобилисты, заинтересованные в разработке тяговых инверторов и электродвигателей, которые вращаются со скоростью выше 25 000 об/мин и выше, могут воспользоваться преимуществами этих приводов.
2500 Модульный привод переменного тока сверхвысокой производительности SiC
Модель 2500 представляет собой полностью цифровой инвертор переменного тока с ШИМ (широтно-импульсной модуляцией), который обеспечивает превосходное управление для сверхвысоких частот
Читать далее
Системные контроллеры
Наши системные контроллеры предлагают различные процессоры и интерфейсные модули для промышленного управления общего назначения. Монтируемый в стойку контроллер предназначен для установки 5, 10 или 20 модулей и отвечает различным требованиям к аналоговым, дискретным, последовательным интерфейсам и интерфейсам преобразователя.
Монтируемый в стойку контроллер предназначен для установки 5, 10 или 20 модулей и отвечает различным требованиям к аналоговым, дискретным, последовательным интерфейсам и интерфейсам преобразователя.
4000 Стойки управления
Семейство контроллеров 4000 предлагает различные процессоры и интерфейсные модули для общепромышленного применения
Читать далее
Штаб-квартира
Присоединяйтесь к нашей команде
Штаб-квартира
Присоединяйтесь к нашей команде
UNICO специализируется на разработке специализированных приводов и многоосевых интегрированных приводных систем для различных отраслей промышленности. Мы используем его передовые инженерные методы для предоставления надежных решений управления с прицелом на производство следующего поколения. У нас есть сильный штат профессиональных квалифицированных инженеров и консультантов, которые позаботятся о проектировании, установке, вводе в эксплуатацию, обслуживании и поддержке.
