

Содержание
Рулевая трапеция — Общая информация, как устроена
Рассмотрим, становящийся архаичным, вид рулевого управления под названием рулевая трапеция. Это наиболее ранний тип рулевого управления. В те годы, когда ещё не были изобретены рулевые рейки это был единственный вариант рулевого управления.
Рулевая трапеция представляет собой систему рычагов, соединяющих рулевой вал (вал рулевого редуктора) с поворотными кулаками.
Ключевыми элементами рулевой трапеции являются рулевые тяги и рулевые наконечники. Вспомогательными элементами являются рулевые сошки, рулевые маятники, рулевые демпферы.
Рассмотрим конкретные примеры рулевых трапеций.
Рулевая трапеция Nissan Terrano WD21 правый руль. Рис.1
При повороте руля происходит поворот входного вала рулевого редуктора-гидроусилителя. В ответ на поворот входного вала происходит поворот выходного вала к которому прикреплена рулевая сошка. Она, в свою очередь, соединена со средней тягой, второй конец которой подвешен на рулевом маятнике, благодаря чему, средняя тяга может совершать колебательные движения по поперечной оси автомобиля. К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
Особенности:
- Рулевая сошка — практически никогда не ломается, так как не имеет шарового шарнира.
- Рулевой маятник — при своевременной замене пластиковых втулок не требует замены в виде всего узла.
- Средняя тяга — поставляется в виде неразборного узла.
- Рулевые наконечники имеют отличия по расположению (наружный/внутренний, левый/правый). Так же отличаются диаметром конуса: с 1986,08 по 1993,01 — 13,5мм, после 1993,01-14,5мм.
Рулевая трапеция MMC Pajero V24W правый руль. Рис.2
При повороте руля происходит поворот входного вала рулевого редуктора-гидроусилителя. В ответ на поворот входного вала происходит поворот выходного вала к которому прикреплена рулевая сошка. Она, в свою очередь, соединена со средней тягой, второй конец которой подвешен на рулевом маятнике, благодаря чему, средняя тяга может совершать колебательные движения по поперечной оси автомобиля. К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
Особенности:
- Рулевая сошка — имеет шаровый шарнир, поэтому при износе заменяется новой.
- Рулевой маятник — при износе меняется целиком.
- Средняя тяга — практически никогда не ломается, так как не имеет шаровых шарниров.
- Рулевые наконечники имеют отличия по расположению (наружный/внутренний).
- Рулевой демпфер — устанавливался опционально.
Рулевая трапеция Suzuki Escudo TD01W правый руль. Рис.3
При повороте руля происходит поворот входного вала рулевого редуктора-гидроусилителя. В ответ на поворот входного вала происходит поворот выходного вала к которому прикреплена рулевая сошка. Она, в свою очередь, соединена со средней тягой, второй конец которой подвешен на рулевом маятнике, благодаря чему, средняя тяга может совершать колебательные движения по поперечной оси автомобиля. К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
Особенности:
- Рулевая сошка — практически никогда не ломается, так как не имеет шарового шарнира.
- Рулевой маятник — при своевременной замене пластиковой втулки не требует замены в виде всего узла.
- Средняя тяга — поставляется в виде неразборного узла.
- Рулевые наконечники имеют отличия по расположению (наружный/внутренний).
Рулевая трапеция Nissan Patrol Y61 левый руль. Рис.4
При повороте руля происходит поворот входного вала рулевого редуктора-гидроусилителя. В ответ на поворот входного вала происходит поворот выходного вала к которому прикреплена рулевая сошка. Она, в свою очередь, соединена с передней тягой (перед передним мостом), второй конец которой соединен с поворотным кулаком, благодаря чему, средняя тяга может совершать колебательные движения по поперечной оси автомобиля. Между правым и левым поворотными кулаками сзади моста закреплена задняя рулевая тяга.
Между правым и левым поворотными кулаками сзади моста закреплена задняя рулевая тяга.
Особенности:
- Рулевая сошка — практически никогда не ломается, так как не имеет шарового шарнира.
- Рулевой маятник — отсутствует, его роль выполняет правый поворотный кулак.
- Передняя тяга — поставляется в виде неразборного узла. Имеются отличия в ухе крепления рулевого демпфера (штырь, либо шаровое соединение).
- Рулевые наконечники имеют отличия по расположению (левый и правый).
- Рулевой демпфер имеет отличия по крепежам (штыри, либо шаровые шарниры).
Рулевая трапеция Toyota Land Cruiser HDJ80 левый руль. Рис.5
При повороте руля происходит поворот входного вала рулевого редуктора-гидроусилителя. В ответ на поворот входного вала происходит поворот выходного вала к которому прикреплена рулевая сошка. Она, в свою очередь, соединена с передней тягой (перед передним мостом), второй конец которой соединен с шкворневым рычагом, благодаря чему, средняя тяга может совершать колебательные движения по поперечной оси автомобиля. Между правым и левым шкворневыми рычагами сзади моста закреплена задняя рулевая тяга.
Между правым и левым шкворневыми рычагами сзади моста закреплена задняя рулевая тяга.
Особенности:
- Рулевая сошка — практически никогда не ломается, так как не имеет шарового шарнира.
- Рулевой маятник — отсутствует, его роль выполняет правый шкворневой рычаг.
- Передняя тяга — имеет сменные наконечники. Имеются отличия в ухе крепления рулевого демпфера (штырь, либо шаровое соединение).
- Рулевые наконечники имеют отличия по расположению (передние/задние, левые и правые).
- Рулевой демпфер имеет отличия по крепежам (штыри, либо шаровые шарниры).
Рулевая трапеция Nissan Vanette C22 правый руль. Рис.6
При повороте руля происходит поворот входного вала рулевого редуктора-гидроусилителя. В ответ на поворот входного вала происходит поворот выходного вала к которому прикреплена рулевая сошка. Она, в свою очередь, соединена с продольной тягой (от сошки до правого маятника). Второе плечо маятника соединено со средней тягой. Второй коней средней тяги соединен с левым маятником, благодаря чему, средняя тяга может совершать колебательные движения по поперечной оси автомобиля. К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
Второй коней средней тяги соединен с левым маятником, благодаря чему, средняя тяга может совершать колебательные движения по поперечной оси автомобиля. К концам средней тяги прикреплены рулевые тяги, которые вторым своим концом прикреплены к поворотным кулакам.
Особенности:
- Так как рулевой вал расположен спереди передней оси автомобиля в конструкцию рулевой трапеции добавлена продольная рулевая тяга и второй маятник.
- Рулевые маятники — при своевременной замене пластиковых втулок не требуют замены в виде всего узла.
- Средняя тяга — поставляется в виде неразборного узла.
- Рулевые наконечники имеют отличия по расположению (наружный/внутренний).
Ремонт рулевой трапеции | Портал Кузов
Рулевая трапеция – это важная составляющая любого автомобиля. Ее основным назначением является передача усилия, поступающего от рулевого колеса, к передним колесам, что позволяет произвести поворот машины. В современном виде рулевая трапеция состоит из рулевого редуктора, рулевой сошки, левой и правой боковых рулевых тяг, средней тяги, маятникового рычага и левого и правого поворотных кулаков.
Исправная работа рулевой трапеции в равной степени важна как для безопасной, так и для комфортной езды по дороге.
На износ элементов рулевой тяги, в частности наконечников (шарниров), оказывают влияние стиль вождения автомобилиста и дорожные условия, в которых эксплуатируется автомобиль.
Самая распространенная и характерная неисправность рулевой трапеции – износ шарниров наконечников рулевых тяг.
Вышедшие из строя шарниры затрудняют вращение рулевого колеса, стучат, образуют люфт и, как следствие, делают езду на автомобиле небезопасной.
Поскольку в современных машинах данные элементы не подлежат ремонту (можно сказать, шарниры — одноразовая вещь), проблема устраняется посредством замены всех тяг трапеции в сборе.
Проблемы с рулевыми тягами можно легко диагностировать если:
— рулевое колесо стало туго вращаться;
— есть люфт при вращении руля (колеса поворачивают не сразу), люфт при вертикальном покачивании колеса говорит о неисправности подшипника ступицы или шаровой опоры, люфт при горизонтальном покачивании – о неисправности рулевого наконечника;
— появились стуки в передней подвески на ямах;
— появилось биение руля;
— автомобиль на дороге начинает менять прямое направление движения.
— в случае сильного износа шарниров или резиновых пыльников,
— в случае деформации рулевых тяг (они могут погнуться, например, вследствие наезда автомобиля на препятствие (камень, яма и т.п.),
— при повышенном люфте руля (к сведению, люфтом называется холостое движение рулевого колеса, то есть движение, при котором поворот не производится),
— когда руль вращается с значительным усилием,
— когда на рулевое колесо передаются толчки и вибрация.
Специалисты из сервиса «Delta1 Motors» поделились с нами опытом диагностики и замены рулевой трапеции на примере автомобиля Mercedes-Benz W140. Для наглядности наше описание снабжено детальными фотографиями.
В сервис обратился владелец Mercedes-Benz W140 с жалобой на люфт руля. Первичная диагностика автомобиля показала повышенный износ всех шарниров рулевых тяг, износ втулок маятникового рычага — требовалась замена данных деталей.
Для выполнения работ требуется профессиональный инструмент, подготовленное рабочее место и хорошее освещение (стационарное + переносная лампа).
Для того, чтобы снять и заменить рулевые тяги и втулки маятникового рычага, вам понадобится набор инструментов и приспособлений:
— домкрат,
— подставки под автомобиль для безопасности,
— съемник рулевых тяг,
— молоток,
— щетка для метала,
— вороток,
— гайковерт,
— различные гаечные ключи,
— отвертки,
— аэрозоль WD-40,
— любрикантная смазка,
— гидравлический пресс,
— тиски,
— фонарь.
Новые детали, готовые к установке. Снизу вверх: рем. комплект маятникового рычага, рулевые тяги левая, правая и средняя.
Поднимаем домкратом одну сторону машины.
Поднимаем домкратом вторую сторону машины.
Внимание! Для безопасности проведения работ ставим под лонжерон подпорки.
Берем гайковерт и торцевую головку на 19. Откручиваем колесо.
Снимаем оба передних колеса.
Колеса сняты. Общий вид старых деталей, которые предстоит снять:
Левая рулевая тяга.
Средняя рулевая тяга.
Маятниковый рычаг.
Правая рулевая тяга.
Чтобы облегчить демонтаж элементов, необходимо очистить все резьбовые соединения.
Чистим гайку левой рулевой тяги щеткой.
После обрабатываем ее аэрозолью WD-40.
Ключом на 19 откручиваем гайку.
Теперь берем специальный съемник рулевых тяг. Ключом на 19 закручиваем съемник, и тяга выскакивает.
С другой стороны тяга крепится к сошке редуктора. Откручиваем ее по аналогии.
Откручиваем ее по аналогии.
Чистим гайку рулевой тяги щеткой. После обрабатываем ее аэрозолью WD-40.
Торцевым ключом на 19 откручиваем гайку.
Берем съемник рулевых тяг. Ключом на 19 закручиваем съемник, и тяга выскакивает.
На снятой левой рулевой тяге видно растрескавшийся пыльник. Он и стал причиной выхода тяги из строя. В шарнир попала вода.
Чтобы снять среднюю рулевую тягу, нам необходимо снять демпфер рулевой трапеции. Он крепится двумя болтами — к средней тяге и к кузову.
Обрабатываем и откручиваем гайки.
Демпфер рулевой трапеции снят.
Откручиваем гайку средней рулевой тяги. Вытаскиваем тягу из сошки.
Вынули среднюю рулевую тягу из сошки редуктора.
Далее, так как нам надо заменить втулку маятникового рычага (другими словами — рулевого маятника), снимаем сам маятник.
Обрабатываем гайку крепления маятника WD-40 и откручиваем ее.
Вынимаем болт крепления маятника.
Для упрощения разбора рулевой трапеции вынем маятник вместе со средней тягой и правой тягой, но сначала правую тягу нужно открутить.
Идем к правой стороне автомобиля и откручиваем правую рулевую тягу от сошки, по аналогии.
Обрабатываем гайку правой рулевой тяги аэрозолью WD-40.
Чистим ее щеткой. Откручиваем гайку ключом на 19.
Теперь берем специальный съемник рулевых тяг. Ключом на 19 закручиваем съемник, и тяга выскакивает.
Так выглядит старый маятник в сборе со средней и правой тягой.
Переходим к рабочему столу. Зажимаем маятник в тиски. Очищаем все болты рулевых тяг с помощью WD-40. Откручиваем гайки.
Берем съемник рулевых тяг. Повторяем необходимую процедуру.
Так выглядит старая правая тяга.
Внимание! Так как рулевые тяги отличаются на правую и левую, не перепутайте их!
Снимаем с маятника среднюю тягу, также с помощью съемника.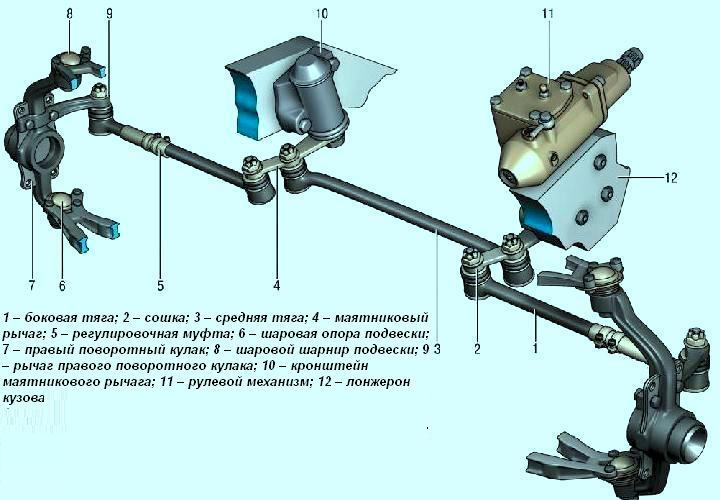
Получаем «голый» маятник.
Берем рем. комплект маятника.
Закрепляем маятник в тиски. Видим растрескавшиеся втулки.
Выбиваем и вытаскиваем старые втулки.
Разница между новыми и старыми деталями видна наглядно.
Вставляем в маятник с двух сторон новые втулки.
И идем к гидравлическому прессу.
Вставляем маятник в пресс.
Берем лубрикантный спрей и обрабатываем им втулки, чтобы они легко вошли в корпус маятника.
Запрессовываем втулки в корпус маятника.
Внимание! Убедитесь, что втулки вошли в маятник полностью и стоят без перекоса.
Идем к машине. Устанавливаем маятник на место.
Берем старую и новую правые рулевые тяги. Снимаем размеры со старой тяги, чтобы такой же размер выставить на новой.
И прикручиваем его.
Вставляем новую правую рулевую тягу в маятник.
И в сошку. И закручиваем.
Правая рулевая тяга установлена.
Берем среднюю (иными словами — центральную) рулевую тягу. Вставляем ее в маятник и в сошку редуктора. Прикручиваем ее.
Так выглядит маятник с двумя новыми тягами.
Берем демпфер руля. Ставим его на место.
Берем левую рулевую тягу. Снимаем размеры со старой тяги, чтобы такой же размер выставить на новой.
Вставляем левую рулевую тягу в рулевой редуктор и в сошку, прикручиваем ее.
Новая рулевая трапеция в сборе.
Проверяем все гайки рулевых тяг, чтобы все было затянуто и все пыльники шарниров были целы. Далее ставим на место передние колеса, и опускаем автомобиль.
Так выглядят старые запчасти.
Внимание! После замены рулевых тяг и втулок маятникового рычага обязательно отрегулируйте развал-схождение колес.
Показания параметров углов подвески до сход-развала.
Сход-развал выставлен.
мастер-класс
Комментарии
Рекомендованные статьи
ND7142_FinalPaper_2018-07-04_12.36.20_UHQKNQ
%PDF-1.4
%
2 0 объект
>>>]/ON[46 0 R]/Order[]/RBGroups[]>>/OCGs[46 0 R 88 0 R]>>/Pages 3 0 R/Type/Catalog/ViewerPreferences 44 0 R>>
эндообъект
87 0 объект
>/Шрифт>>>/Поля 92 0 R>>
эндообъект
45 0 объект
>поток
приложение/pdf
2018-07-30T22:51:32+08:00pdfFactory Pro www.pdffactory.com2018-08-22T11:45:13+02:002018-08-22T11:45:13+02:00pdfFactory Pro 3.52 (Windows NT Home 10.00 x64 китайский (упрощенный))uuid:f379f1b2-5ddf-487c-9b7f-35f92d247fd3uuid:c3cbc575-fe73-4705-9394-c83d3dac0071
конечный поток
эндообъект
3 0 объект
>
эндообъект
44 0 объект
>
эндообъект
5 0 объект
>/Шрифт>/ProcSet[/PDF/Text]/XObject>>>/Тип/Страница>>
эндообъект
15 0 объект
>/ExtGState>/Font>/ProcSet[/PDF/Text/ImageC/ImageI]/XObject>>>/Type/Page>>
эндообъект
23 0 объект
>/Шрифт>/ProcSet[/PDF/Text]/XObject>>>/Тип/Страница>>
эндообъект
26 0 объект
>/Шрифт>/ProcSet[/PDF/Text/ImageC]/XObject>>>/Тип/Страница>>
эндообъект
141 0 объект
>поток
HWYoG~_’ }͵07*Z\89’Sɦ*7 tm#&i&p:I2g )SwuӨźdVP?-i\
‘Геометрия рулевого управления Аккермана’ — Графиати
Библиографии: ‘Геометрия рулевого управления Аккермана’ — Графиати
Украинская
французский
итальянский
испанский
Польский
португальский
немецкий
- Библиография
- Подписаться
- Автоматическая транслитерация
- Соответствующие библиографии по темам
- Справочные направляющие
- Новости
- Блог
- Справка
Автор:
Графиати
Опубликовано:
4 июня 2021 г.
Последнее обновление:
1 февраля 2022 г.
Создайте точную ссылку в APA, MLA, Chicago, Harvard и других стилях. «Геометрия рулевого управления Аккермана».
Рядом с каждым источником в списке литературы есть кнопка «Добавить в библиографию». Нажмите на нее, и мы автоматически сгенерируем библиографическую ссылку на выбранную работу в нужном вам стиле цитирования: APA, MLA, Harvard, Chicago, Vancouver и т. д.
Вы также можете скачать полный текст академической публикации в формате pdf и прочитать его реферат онлайн, когда он доступен в метаданных.
Облако тегов позволяет вам получить доступ к еще большему количеству связанных тем исследований, а соответствующие кнопки после каждого раздела страницы позволяют просматривать расширенные списки книг, статей и т. д. по выбранной теме.
Содержимое
- Журнальная статья
- Диссертации / Диссертации
- Материалы конференции
Близкие темы исследований
Журнальные статьи на тему «Геометрия рулевого управления Аккермана»:
Чжэн, Хунъюй и Шуо Ян. «Исследование геометрии рулевого управления гоночных автомобилей с учетом угла бокового увода шины». Труды Института инженеров-механиков, часть P: Журнал спортивной техники и технологий 234, вып. 1 (9 сентября 2019 г.): 72–87. http://dx.doi.org/10.1177/1754337119872417.
«Исследование геометрии рулевого управления гоночных автомобилей с учетом угла бокового увода шины». Труды Института инженеров-механиков, часть P: Журнал спортивной техники и технологий 234, вып. 1 (9 сентября 2019 г.): 72–87. http://dx.doi.org/10.1177/1754337119872417.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
Трапеция рулевого управления, разработанная в соответствии с геометрией рулевого управления Аккермана, потенциально вызывает чрезмерный износ шин и влияет на эффективность рулевого управления из-за большой деформации шины в результате большого поперечного ускорения. Чтобы решить эти проблемы, в этой статье представлен метод проектирования системы рулевого управления гоночного автомобиля, который учитывает углы бокового увода шин для оптимизации целевого соотношения углов поворота рулевого колеса. Во-первых, гоночная трасса планировалась с помощью генетического алгоритма в соответствии с заданной гоночной трассой и характеристиками гонщика. Затем была построена целевая функция отношения идеального угла поворота рулевого колеса путем введения поправочного коэффициента Аккермана и установления модифицированной модели геометрии рулевого управления Аккермана с учетом угла бокового увода шины. Затем был разработан эксперимент по сбору данных, и с помощью предложенного алгоритма моделирования был определен поправочный коэффициент Аккермана. Наконец, степень совпадения центров управления колесами была определена как показатель оценки, который можно использовать для описания и оценки эффективности координации движения колес. Результаты моделирования показывают, что метод проектирования системы рулевого управления эффективно улучшает управляемость гоночного автомобиля и уменьшает наклон шин.
Во-первых, гоночная трасса планировалась с помощью генетического алгоритма в соответствии с заданной гоночной трассой и характеристиками гонщика. Затем была построена целевая функция отношения идеального угла поворота рулевого колеса путем введения поправочного коэффициента Аккермана и установления модифицированной модели геометрии рулевого управления Аккермана с учетом угла бокового увода шины. Затем был разработан эксперимент по сбору данных, и с помощью предложенного алгоритма моделирования был определен поправочный коэффициент Аккермана. Наконец, степень совпадения центров управления колесами была определена как показатель оценки, который можно использовать для описания и оценки эффективности координации движения колес. Результаты моделирования показывают, что метод проектирования системы рулевого управления эффективно улучшает управляемость гоночного автомобиля и уменьшает наклон шин.
Чжао, Цзин-Шань, Сян Лю, Чжи-Цзин Фэн и Цзянь С. Дай. «Конструкция рулевого механизма типа Аккермана». Труды Института инженеров-механиков, часть C: Journal of Machine Engineering Science 227, вып. 11 (4 февраля 2013 г.): 2549–2562. http://dx.doi.org/10.1177/0954406213475980.
Дай. «Конструкция рулевого механизма типа Аккермана». Труды Института инженеров-механиков, часть C: Journal of Machine Engineering Science 227, вып. 11 (4 февраля 2013 г.): 2549–2562. http://dx.doi.org/10.1177/0954406213475980.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Резюме:
Данная статья посвящена синтезу рулевого механизма, точно отвечающего требованиям геометрии рулевого управления Аккермана. Он начинается с обзора четырехзвенниковой связи, затем обсуждается количество точек, которые может точно отследить обычная четырехзвенная связь. После указания ограничений четырехзвенного рулевого механизма в этой статье исследуется геометрия поворота для управляемых колес и предлагается рулевой механизм с неполными некруглыми зубчатыми колесами для транспортного средства путем преобразования критериев Аккермана в механизм синтеза. Сформулированы и рассчитаны кривые шага, кривые добавления, кривые дедендума, профили зубьев и переходные кривые некруглых зубчатых колес. Кинематическое моделирование выполняется для демонстрации цели дизайна.
Сформулированы и рассчитаны кривые шага, кривые добавления, кривые дедендума, профили зубьев и переходные кривые некруглых зубчатых колес. Кинематическое моделирование выполняется для демонстрации цели дизайна.
Прамудита Вид, Вимба, Ауфар Сихан и Данардоно Агус Сумарсоно. «Кинематический анализ трехшаровой тяги в механизме рулевого управления и наклона Аккермана для трехколесного велосипеда». E3S Web of Conferences 130 (2019): 01038. http://dx.doi.org/10.1051/e3sconf/201913001038.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
В настоящее время представлена концепция трехколесного транспортного средства с наклоном, одним из которых является трехколесный электрический наклоняемый велосипед, обеспечивающий альтернативный вид транспорта. Некоторые конструкции наклонных трехколесных велосипедов используют конфигурацию трехколесного велосипеда с головастиком, и для них требуется адекватная система рулевого управления, которая может быть синергирована с механизмом наклона. Рулевой механизм повторяет геометрию рулевого управления Аккермана. Использование геометрии Аккермана означает применение к трехколесному велосипеду механизма трапециевидной четырехзвенной навески. Для создания и поддержания простой трапециевидной формы предлагается модель тройной шаровой тяги, представляющая собой единый стержень, поддерживающий три шаровых шарнира. Поскольку возможности модели еще предстоит доказать, в этом исследовании оценивается использование модели рулевой тяги, чтобы выяснить ее возможности для поддержки работы рулевого механизма трехколесного велосипеда. Измерения проводятся после моделирования 3D-модели для извлечения некоторых данных, таких как максимальный угол наклона, а также внутренний и внешний углы поворота руля. Другое моделирование с использованием обычной модели рулевой тяги также проводилось с использованием того же метода для целей сравнения. Результатами исследования являются максимально допустимый угол наклона и генерируемые углы поворота по Аккерману.
Рулевой механизм повторяет геометрию рулевого управления Аккермана. Использование геометрии Аккермана означает применение к трехколесному велосипеду механизма трапециевидной четырехзвенной навески. Для создания и поддержания простой трапециевидной формы предлагается модель тройной шаровой тяги, представляющая собой единый стержень, поддерживающий три шаровых шарнира. Поскольку возможности модели еще предстоит доказать, в этом исследовании оценивается использование модели рулевой тяги, чтобы выяснить ее возможности для поддержки работы рулевого механизма трехколесного велосипеда. Измерения проводятся после моделирования 3D-модели для извлечения некоторых данных, таких как максимальный угол наклона, а также внутренний и внешний углы поворота руля. Другое моделирование с использованием обычной модели рулевой тяги также проводилось с использованием того же метода для целей сравнения. Результатами исследования являются максимально допустимый угол наклона и генерируемые углы поворота по Аккерману. Каждая разработанная модель имеет свои преимущества.
Каждая разработанная модель имеет свои преимущества.
Ценг, Дин Чанг, Тат Ва Чао и Джиун Вэй Чанг. «Управление парковкой на основе изображений с использованием геометрии рулевого управления Аккермана». Прикладная механика и материалы 437 (октябрь 2013 г.): 823–26. http://dx.doi.org/10.4028/www.scientific.net/amm.437.823.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
Предлагается система управления парковкой на основе изображений, которая поможет водителям парковать свои автомобили на парковочном месте. Предлагаемая система использует только встроенное оборудование и широкоугольную камеру для захвата изображений для анализа. Предлагаемая система не нуждается в датчике рулевого управления; это способ сэкономить деньги; кроме того, он подходит для подержанных автомобилей и вторичного использования. Входное изображение сначала преобразуется в изображение вида сверху с помощью матрицы преобразования гомографии. Затем из двух непрерывных изображений извлекаются угловые характерные точки, чтобы они соответствовали друг другу. Пары характерных точек дополнительно обрезаются с помощью метрик ошибок методом наименьших квадратов. Затем оставшиеся пары характерных точек используются для оценки параметров движения транспортного средства, где модель преобразования координат используется для моделирования и имитации геометрии рулевого управления Аккермана для описания движения транспортного средства. Наконец, траектория транспортного средства генерируется на основе параметров движения транспортного средства, а направляющие линии парковки вычерчиваются в соответствии с траекторией транспортного средства.
Входное изображение сначала преобразуется в изображение вида сверху с помощью матрицы преобразования гомографии. Затем из двух непрерывных изображений извлекаются угловые характерные точки, чтобы они соответствовали друг другу. Пары характерных точек дополнительно обрезаются с помощью метрик ошибок методом наименьших квадратов. Затем оставшиеся пары характерных точек используются для оценки параметров движения транспортного средства, где модель преобразования координат используется для моделирования и имитации геометрии рулевого управления Аккермана для описания движения транспортного средства. Наконец, траектория транспортного средства генерируется на основе параметров движения транспортного средства, а направляющие линии парковки вычерчиваются в соответствии с траекторией транспортного средства.
Фэйи, С. О’Ф и Д. Р. Хьюстон. «Новая автомобильная рулевая тяга». Journal of Mechanical Design 119, вып. 4 (1 декабря 1997 г.): 481–84. http://dx.doi.org/10.1115/1.2826393.
http://dx.doi.org/10.1115/1.2826393.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
В этом кратком обзоре представлены результаты численного исследования с участием нового механизма, называемого восьмичленным механизмом Фэи (FEMM), который применяется в автомобильном рулевом управлении. Этот механизм рассматривается в рамках плоской кинематической модели рулевого управления. Мы получаем управляющую кинематику и сравниваем результаты между синтезированным FEMM и двумя синтезированными рулевыми тягами типа Аккермана. Результаты показывают, что FEMM лучше приближает идеальную геометрию рулевого управления и может обеспечить расширенный диапазон движения для операций на умеренной скорости.
Ши, Чан Чжэн, Чжун Сю Ши и Тянь Тянь Ван. «Проектирование рулевого трапециевидного механизма для гоночной базы FSC на Matlab». Advanced Materials Research 647 (январь 2013 г.): 885–90. http://dx.doi.org/10.4028/www.scientific.net/amr.647.885.
Advanced Materials Research 647 (январь 2013 г.): 885–90. http://dx.doi.org/10.4028/www.scientific.net/amr.647.885.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
Конструкция рулевого трапециевидного механизма является одним из важных аспектов системы рулевого управления автомобиля. Каждый параметр трапециевидного рулевого управления оказывает существенное влияние на характеристики рулевого управления, устойчивость и срок службы шин автомобиля. На основе анализа взаимосвязи внутреннего и внешнего угла колеса с помощью аналитического метода программное обеспечение Matlab можно использовать для проектирования трапецеидального рулевого управления FSC. механизм. Учитывая условия автомобильной гонки, соответствующий параметр трапеции рулевого управления предназначен для того, чтобы сделать отношение угла наклона колеса близким к соотношению геометрии Аккермана, что снижает износ шин, обеспечивая хорошую управляемость и хорошее сцепление с дорогой.
Го, Цуй Ся, Кан Лю и Вэнь Лин Се. «Оптимальный расчет основного параметра несвязанной трапеции рулевого управления». Advanced Materials Research 424-425 (январь 2012 г.): 334–37. http://dx.doi.org/10.4028/www.scientific.net/amr.424-425.334.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
При проектировании несвязной рулевой трапеции функция Fmincon из набора инструментов оптимизации MATLAB используется для оптимизации ее основных параметров. Во-первых, установить оптимальную математическую модель. Во-вторых, получить кривую угла поворота колеса внутри и снаружи рулевого управления методом наименьших квадратов. Наконец, сравните кривую с идеальной геометрической кривой Аккермана, чтобы получить параметры оптимизации несвязной рулевой трапеции. Пример оптимизированной конструкции подтвердил, что фактическая кривая угла отклонения обеих сторон рулевого колеса была почти близка к кривой идеальной геометрии Аккермана, что обеспечивает чистое качение рулевого колеса в обычных условиях, что снижает износ шин.
Шен, Бин и П. К. Джи. «Применение теории AD в исследовании системы активного рулевого управления». Материаловедческий форум 697-698 (сентябрь 2011 г.): 636–41. http://dx.doi.org/10.4028/www.scientific.net/msf.697-698.636.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
Новый тип системы рулевого управления, так называемая активная система рулевого управления Аккермана, предлагается путем объединения активного рулевого управления с теорией геометрии Аккермана. Представлено применение аксиоматических концепций проектирования к проектированию системы рулевого управления. Основные функциональные требования и относительные конструктивные параметры желаемых систем рулевого управления вводятся в соответствии с тенденцией эволюции систем рулевого управления. Предлагается система управления расцеплением и проводится моделирование для проверки концепции. Результат показывает, что связанная система может быть преобразована в несвязанную путем дальнейшего проектирования системы управления.
Предлагается система управления расцеплением и проводится моделирование для проверки концепции. Результат показывает, что связанная система может быть преобразована в несвязанную путем дальнейшего проектирования системы управления.
Молдовану, Д., А. Чато и Н. Багамери. «Исследование реализации геометрии рулевого управления Аккермана в MATLAB». Серия конференций IOP: Материаловедение и инженерия 568 (17 сентября 2019 г.): 012092. http://dx.doi.org/10.1088/1757-899x/568/1/012092.
Полный текст
APA, Гарвард, Ванкувер, ISO и другие стили
Борреро-Герреро, Генри, Рафаэль Буэно-Сампайо и Марсело Беккер. «Стратегия нечеткого управления, применяемая к регулировке переднего угла поворота сельскохозяйственного мобильного робота 4WSD». Лампсакос , нет. 7 (16 июня 2012 г.): 31. http://dx.doi.org/10.21501/21454086.842.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
В данной статье представлены предварительные исследования стратегии управления, основанной на нечеткой логике, спроектированной для системы рулевого управления проекта AGRIBOT, состоящей из колесного автономного мобильного робота в реальном масштабе, снабженного четырьмя независимыми управляемыми и ведущими колесами (4WSD). В этой работе мы представляем предварительный проект нечеткого регулятора, примененный к переднему углу поворота, с использованием многопараметрического объекта, который включает упрощенную линейную модель поперечной динамики транспортного средства, входными данными которой являются линейная комбинация заднего и переднего углов поворота. Стратегия нечеткого управления была выбрана потому, что она обеспечивает гибкий способ развертывания встроенных систем. Моделирование используется для иллюстрации производительности разработанного контроллера. Мы используем геометрию Аккермана, чтобы отследить передний угол поворота рулевого колеса, который позволяет автомобилю правильно выполнять заданный маневр, сохраняя минимальный уровень устойчивости и маневренности. Цель состоит в том, чтобы установить взаимосвязь между входными командами рулевого управления и командами управления исполнительным механизмам, чтобы можно было регулировать положение исполнительных механизмов относительно оси движения при изменении траектории.
В этой работе мы представляем предварительный проект нечеткого регулятора, примененный к переднему углу поворота, с использованием многопараметрического объекта, который включает упрощенную линейную модель поперечной динамики транспортного средства, входными данными которой являются линейная комбинация заднего и переднего углов поворота. Стратегия нечеткого управления была выбрана потому, что она обеспечивает гибкий способ развертывания встроенных систем. Моделирование используется для иллюстрации производительности разработанного контроллера. Мы используем геометрию Аккермана, чтобы отследить передний угол поворота рулевого колеса, который позволяет автомобилю правильно выполнять заданный маневр, сохраняя минимальный уровень устойчивости и маневренности. Цель состоит в том, чтобы установить взаимосвязь между входными командами рулевого управления и командами управления исполнительным механизмам, чтобы можно было регулировать положение исполнительных механизмов относительно оси движения при изменении траектории.
Еще источники
Диссертации/диссертации на тему «Геометрия рулевого управления по Аккерману»:
Фрыч, Мартин. «Ovládání robota с Ackermannovým podvozkem.» Магистерская работа, Высокие технические ученые в Брне. Факультет информационных технологий, 2017. http://www.nusl.cz/ntk/nusl-363743.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Реферат:
В данной статье описано создание робота в операционной системе Robot Operating System (ROS) с управлением по Аккерману. Он содержит принцип геометрии рулевого управления Аккермана, поиск плат контроллера и основы устройства ROS. В основе робота лежит радиоуправляемая машинка с подключенным контроллером PixHawk. На роботе размещен бортовой компьютер Raspberry Pi3 с работающей ROS. Этот компьютер подключен к ноутбуку через сеть Wi-Fi. В этой статье также описана процедура запуска робота и ROS, а также дизайн графического пользовательского интерфейса (GUI), который будет отображать сенсорные данные и обеспечивать другие функции. В другой части диссертации объясняется принцип действия оптического энкодера и как создать собственный энкодер, который может обнаруживать вращение колеса. Это используется для реализации одометрии робота. Проанализирована структура навигационной библиотеки ROS с точки зрения ее ввода в эксплуатацию. Реализация графического интерфейса и навигационной библиотеки будет рассмотрена в основной диссертации.
Этот компьютер подключен к ноутбуку через сеть Wi-Fi. В этой статье также описана процедура запуска робота и ROS, а также дизайн графического пользовательского интерфейса (GUI), который будет отображать сенсорные данные и обеспечивать другие функции. В другой части диссертации объясняется принцип действия оптического энкодера и как создать собственный энкодер, который может обнаруживать вращение колеса. Это используется для реализации одометрии робота. Проанализирована структура навигационной библиотеки ROS с точки зрения ее ввода в эксплуатацию. Реализация графического интерфейса и навигационной библиотеки будет рассмотрена в основной диссертации.
Материалы конференции по теме «Аккермановская геометрия рулевого управления»:
Митчелл, В. М. К., Аллан Стэнифорт и Ян Скотт. «Анализ геометрии рулевого управления Аккермана». In Конференция и выставка Motorsports Engineering . 400 Commonwealth Drive, Warrendale, PA, United States: SAE International, 2006. http://dx.doi.org/10.4271/2006-01-3638.
http://dx.doi.org/10.4271/2006-01-3638.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Плечник, Марк М. и Дж. Майкл Маккарти. «Проект пространственной рулевой тяги 5-SS». В ASME 2012 International Design Engineering Technical Conference и Computers and Information in Engineering Conference . Американское общество инженеров-механиков, 2012 г. http://dx.doi.org/10.1115/detc2012-71405.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Реферат:
В этой статье представлен кинематический синтез рулевой тяги, которая изменяет колею, колесную базу, развал и высоту колеса на повороте, сохраняя при этом геометрию Аккермана. Каждое колесо управляется рычажным механизмом платформы из 5 СС, который состоит из подвижной платформы, соединенной пятью цепями СС с шасси автомобиля. Геометрия рулевого управления Ackermann гарантирует, что все четыре колеса будут двигаться по дугам окружности с одной и той же центральной точкой. S обозначает сферическое или шаровое шарнирное соединение. Задача кинематического синтеза формулируется с использованием семи пространственных позиций задачи. Процедура вычисляет цепочки SS, которые направляют платформу через семь позиций задач, и проверяет все комбинации из пяти, которые образуют связь с одной степенью свободы. Кинематический анализ определяет производительность каждого варианта конструкции и устраняет функциональные дефекты. В процессе проектирования позиции задач изменяются случайным образом в пределах ограничений, чтобы найти полезную конструкцию механизма. Механизмы считаются полезными, если они плавно проходят через все семь позиций задач. При анализе 1000 наборов позиций задач было найдено только 10 полезных механизмов. Вторая итерация произвела 22 полезных механизма из 1000 наборов задач. Приведен пример конструкции рулевой трапеции.
Геометрия рулевого управления Ackermann гарантирует, что все четыре колеса будут двигаться по дугам окружности с одной и той же центральной точкой. S обозначает сферическое или шаровое шарнирное соединение. Задача кинематического синтеза формулируется с использованием семи пространственных позиций задачи. Процедура вычисляет цепочки SS, которые направляют платформу через семь позиций задач, и проверяет все комбинации из пяти, которые образуют связь с одной степенью свободы. Кинематический анализ определяет производительность каждого варианта конструкции и устраняет функциональные дефекты. В процессе проектирования позиции задач изменяются случайным образом в пределах ограничений, чтобы найти полезную конструкцию механизма. Механизмы считаются полезными, если они плавно проходят через все семь позиций задач. При анализе 1000 наборов позиций задач было найдено только 10 полезных механизмов. Вторая итерация произвела 22 полезных механизма из 1000 наборов задач. Приведен пример конструкции рулевой трапеции. Видео этой связи можно посмотреть по адресу http://www.youtube.com/watch?v=hEvbDiyQMiw.
Видео этой связи можно посмотреть по адресу http://www.youtube.com/watch?v=hEvbDiyQMiw.
Сансибриан, Рамон, Ана Де-Хуан, Пабло Гарсия, Фернандо Виадеро и Альфонсо Фернандес. «Оптимальная конструкция рулевых механизмов дорожных транспортных средств». In ASME 2007 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference . ASMEDC, 2007. http://dx.doi.org/10.1115/detc2007-34422.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Реферат:
В данной статье речь идет о конструкции рулевых механизмов дорожных транспортных средств. С этой целью рассматриваются кинематические модели трех типов рулевых тяг и используется геометрия Аккермана для определения целевой функции. Предлагаемый метод использует метод размерного синтеза, основанный на локальной оптимизации, для получения размеров звеньев. Задача формулируется как синтез генератора функций, где внутреннее колесо поддерживается входным звеном, а выходное звено поддерживается внешним колесом. Формулировка, представленная в данной статье, была разработана авторами и способна учесть необходимые условия точности при проектировании такого рода связи. Приведены три примера, иллюстрирующие применение метода.
Задача формулируется как синтез генератора функций, где внутреннее колесо поддерживается входным звеном, а выходное звено поддерживается внешним колесом. Формулировка, представленная в данной статье, была разработана авторами и способна учесть необходимые условия точности при проектировании такого рода связи. Приведены три примера, иллюстрирующие применение метода.
Мин Ван Чхве, Джун Сок Пак, Бон Су Ли и Ман Хён Ли. «В характеристиках управляемого автомобиля с независимыми колесами (4WS) применена геометрия Аккермана». В 2008 г. Международная конференция по управлению, автоматизации и системам (ICCAS) . IEEE, 2008 г. http://dx.doi.org/10.1109/iccas.2008.4694549.
Полный текст
APA, Гарвард, Ванкувер, ISO и другие стили
Ван, Я и Деннис Хонг. «Поиск кратчайшего пути для мобильного робота с двумя приводными колесами со спицами на основе переменных кинематических конфигураций». В ASME 2010 Международная техническая конференция по проектированию и Компьютеры и информация в инженерной конференции . ASMEDC, 2010. http://dx.doi.org/10.1115/detc2010-28987.
В ASME 2010 Международная техническая конференция по проектированию и Компьютеры и информация в инженерной конференции . ASMEDC, 2010. http://dx.doi.org/10.1115/detc2010-28987.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
В данной статье представлены стратегии поиска кратчайшего пути для мобильного робота с двумя приводными колесами со спицами на основе переменных кинематических конфигураций. Предлагаемая здесь стратегия планирования оптимального пути объединяет традиционные инструменты планирования пути с ограничениями и уникальные пространства кинематической конфигурации мобильного робота IMPASS (интеллектуальная мобильная платформа с системой приводных спиц). В IMPASS используется уникальная концепция мобильности, заключающаяся в вытягивании или вытягивании индивидуально приводимых в действие спиц для выполнения рулевого управления с переменным радиусом кривизны с использованием изменяющейся кинематической конфигурации во время движения. Благодаря этой уникальной стратегии движения различные кинематические топологии создают определенные характеристики движения в виде рулевого управления с переменным радиусом кривизны. Вместо традиционного дифференциального привода или локомоции с рулевым управлением Аккермана для классификации оптимальных путей в известных перестановках последовательностей, состоящих из различных кинематических конфигураций, применяются методы комбинационной геометрии пути, кривая Дубинса и кривая Ридса и Шеппа. Численное моделирование проводится для проверки аналитических решений, полученных с использованием множителя Лагранжа.
Благодаря этой уникальной стратегии движения различные кинематические топологии создают определенные характеристики движения в виде рулевого управления с переменным радиусом кривизны. Вместо традиционного дифференциального привода или локомоции с рулевым управлением Аккермана для классификации оптимальных путей в известных перестановках последовательностей, состоящих из различных кинематических конфигураций, применяются методы комбинационной геометрии пути, кривая Дубинса и кривая Ридса и Шеппа. Численное моделирование проводится для проверки аналитических решений, полученных с использованием множителя Лагранжа.
Ю, Зитянь и Цзюньмин Ван. «Новый метод оценки параметров положения центра тяжести транспортного средства на основе рулевого управления Аккермана». В ASME 2016 Dynamic Systems and Control Conference . Американское общество инженеров-механиков, 2016 г. http://dx.doi.org/10.1115/dscc2016-9674.
Полный текст
APA, Harvard, Vancouver, ISO и другие стили
Abstract:
Определение положения центра тяжести транспортного средства является важной, но сложной задачей для управления передовыми транспортными средствами, такими как автоматизированные транспортные средства, особенно в условиях ежедневного использования, когда конфигурации системы и состояние полезной нагрузки могут меняться. Для решения этой проблемы в этой статье предлагается новый метод для оценки трехмерных параметров положения центра тяжести транспортного средства, не полагаясь на подробные параметры конфигурации подвески или модели поперечной силы шины. В задаче оценки уравнения плоской динамики транспортного средства синтезируются вместе, чтобы уменьшить количество неизвестных боковых сил на шину, затем можно найти условие геометрии рулевого управления Аккермана, чтобы исключить влияние оставшихся неизвестных боковых сил на шину переднего колеса. Когда неизвестные силы в шинах отменяются, метод рекурсивной регрессии наименьших квадратов (RLS) используется для определения трехмерных параметров положения центра тяжести. Модель транспортного средства с подрессоренной массой в виде перевернутого маятника разработана для помощи в анализе и преобразовании измеренных сигналов датчика. Моделирование, проведенное в высокоточной модели автомобиля CarSim®, продемонстрировало возможности этого предложенного метода в оценке параметров положения центра тяжести автомобиля.
Для решения этой проблемы в этой статье предлагается новый метод для оценки трехмерных параметров положения центра тяжести транспортного средства, не полагаясь на подробные параметры конфигурации подвески или модели поперечной силы шины. В задаче оценки уравнения плоской динамики транспортного средства синтезируются вместе, чтобы уменьшить количество неизвестных боковых сил на шину, затем можно найти условие геометрии рулевого управления Аккермана, чтобы исключить влияние оставшихся неизвестных боковых сил на шину переднего колеса. Когда неизвестные силы в шинах отменяются, метод рекурсивной регрессии наименьших квадратов (RLS) используется для определения трехмерных параметров положения центра тяжести. Модель транспортного средства с подрессоренной массой в виде перевернутого маятника разработана для помощи в анализе и преобразовании измеренных сигналов датчика. Моделирование, проведенное в высокоточной модели автомобиля CarSim®, продемонстрировало возможности этого предложенного метода в оценке параметров положения центра тяжести автомобиля.
