

Содержание
16.6. Тиристорное управление электроприводом
Основными
факторами, обусловившими быстрое
развитие тиристорного электропривода,
являются следующие: высокий КПД
тиристорного преобразователя (0,95—0,97),
относительно малые габариты, масса и
инерционность тиристоров, незначительная
мощность устройств управления.
Использование
тиристоров и соответствующих систем
управления позволяет получать все
требуемые регулировочные характеристикии
динамические режимы двигателей как
переменного, так и постоянного тока.
Тиристорный
электропривод переменного тока. Для
регулирования частоты вращения
асинхронного двигателя тиристоры
включаются в цепь статора или ротора.
В первом случае с их помощью можно
регулировать амплитуду (фазное
регулирование) или частоту (частотное
регулирование) синусоидального напряжения
на обмотках статора и, следовательно,
вращающий момент на валу двигателя
(14.35). Во втором случае можно изменять
активное сопротивление цепи ротора и
таким образом (рис. 14.25) регулировать
14.25) регулировать
его частоту вращения. На рис. 16.9 приведена
схема преобразователя
(регулятора) переменного напряжения на
обмотках статора асинхронного двигателя
с двумя встречно-параллельными тиристорами
в каждой фазе. Устройство управления
синхронно открывает тиристоры в порядке
чередования фаз. Изменяя момент времени
включения тиристоров (рис. 10.17), можно
регулировать амплитуду напряжения
основной гармоники. Выключение тиристоров
осуществляется автоматически при
изменении полярности напряжения
соответствующей фазы. Такой режим
называется естественной
коммутацией.
Искусственной
коммутациейназывается
выключение тиристора посредством
подключения к его выводам какого-либо
источника энергии, создающего в нем ток
обратного направления. Примером может
служить тиристорное
управление в цепи ротора асинхронного
двигателя (рис. 16.10). Рабочий тиристор
Т,
замыкающий
цепь выпрямленного тока через резистор
r1
имеет
узел искусственной коммутации. Узел
Узел
искусственной коммутации содержит
вспомогательный тиристор Tвс,
резистор г2и
конденсатор С.
Пусть
первоначально рабочий тиристор Т
открыт,
а вспомогательный Твс
закрыт.
В это время конденсатор С
заряжается
через резистор г2
так, как показано на рис. 16.10. Подадим
теперь на управляющий электрод
вспомогательного тиристора Твс
отпирающий
сигнал из устройства управления.
Вспомогательный тиристор включится, и
конденсатор начнет разряжаться через
него и рабочий тиристор. Так как при
этом разрядный ток конденсатора направлен
навстречу прямому току рабочего
тиристора, то последний выключается.
После этого конденсатор перезаряжается
через резистор r1
и
открытый вспомогательный тиристор.
Чтобы вновь включить
рабочий тиристор, на его управляющий
электрод надо подать сигнал из устройства
управления. При этом конденсатор своим
При этом конденсатор своим
разрядным током выключает вспомогательный
тиристор, а сам конденсатор перезаряжается,
возвращаясь к состоянию, показанному
на рисунке.
Следующий цикл
начинается с подачи сигнала из устройства
управления на управляющий электрод
вспомогательного тиристора.
Эквивалентное
сопротивление цепи ротора зависит от
отношения интервалов времени открытого
и закрытого состояний рабочего тиристора.
Регулируя это отношение, можно регулировать
среднее значение тока ротора и,
следовательно, момент, развиваемый
асинхронным двигателем.
Одним
из наиболее перспективных способов
регулирования частоты вращения
асинхронных двигателей является
изменение
частоты напряжения
на обмотках статора. Для этой цели широко
используются тиристорные автономные
инверторы, т.
е. устройства преобразования постоянного
напряжения в переменное с любым числом
фаз.
Рассмотрим
простейшую схему однофазного автономного
инвертора (рис. 16.11), в которой источник
16.11), в которой источник
постоянного напряжения Е
соединен
со средней точкой первичной обмотки
трансформатора. Когда тиристор T1
включается сигналом блока управления,
а тиристор Т2
закрыт,
то источник постоянного напряжения Е
подключается
к левой половине первичной обмотки
трансформатора. Ток этой части •первичной
обмотки возбуждает магнитный поток в
магнитопроводе трансформатора. При
этом во вторичной обмотке трансформатора
индуктируется ЭДС, а конденсатор С
заряжается,
как показано на рисунке.
Если
управляющий сигнал включает тиристор
Т2,
то
перезарядка конденсатора С закрывает
тиристор T1
аналогично рис. 16.10, а источник постоянного
напряжения Е
подключается
к правой половине первичной обмотки. В
магнитопроводе возбуждается магнитный
поток противоположного направления,
чему соответствует и изменение направления
ЭДС, индуктируемой во вторичной обмотке
ω2.
Частота
переменного напряжения, получаемого
от инвертора, определяется частотой
генератора управляющих сигналов,
включающих поочередно тиристоры.
Описанный инвертор
может быть использован для плавной
регулировки частоты вращения однофазных
и двухфазных асинхронных двигателей
(см. § 14.18).
Инвертирование
постоянного напряжения в трехфазную
или многофазную систему напряжений
осуществляется аналогично. Обычно в
инверторе вместо источника постоянного
напряжения Е
используется
выпрямленное напряжение сети переменного
тока. Если для этой цели, так же как и
для инвертирования, использовать
тиристоры, то выпрямленное напряжение
можно регулировать в широких пределах
(см. рис. 10.17). Это дает дополнительные
возможности для управления асинхронным
двигателем.
Устройства,
сочетающие в себе тиристорные выпрямители
и тиристорные инверторы, принято называть
шириапорными
преобразователями. В
электроприводе иногда используют и
более сложные тиристорные преобразователи,
например тиристорные выпрямитель —
инвертор — выпрямитель.
Применение различных
способов тиристорного управления
позволяет плавно и экономично регулировать
частоту вращения асинхронных двигателей
в диапазоне до 50 : 1 и выше.
Тиристорный
электропривод постоянного тока.
При необходимости регулирования частоты
вращения двигателя постоянного тока и
получения специальных характеристик
в настоящее время широко используются
тиристорные преобразователи. С их
помощью двигатели постоянного тока
можно подключить к сети переменного
тока.
Одна
из простейших схем включения двигателя
постоянного тока в трехфазную цепь
переменного тока приведена на рис.
16.12. Управляющее устройство синхронно
включает тиристоры в порядке чередования
фаз в положительные полупериоды фазных
напряжений (рис. 10.17). В отрицательные
полупериоды фазных напряжений происходит
естественная коммутация, и тиристоры
соответствующих фаз закрываются.
Среднее значение
выпрямленного напряжения трех фаз равно
напряжению на якоре двигателя постоянного
тока (10.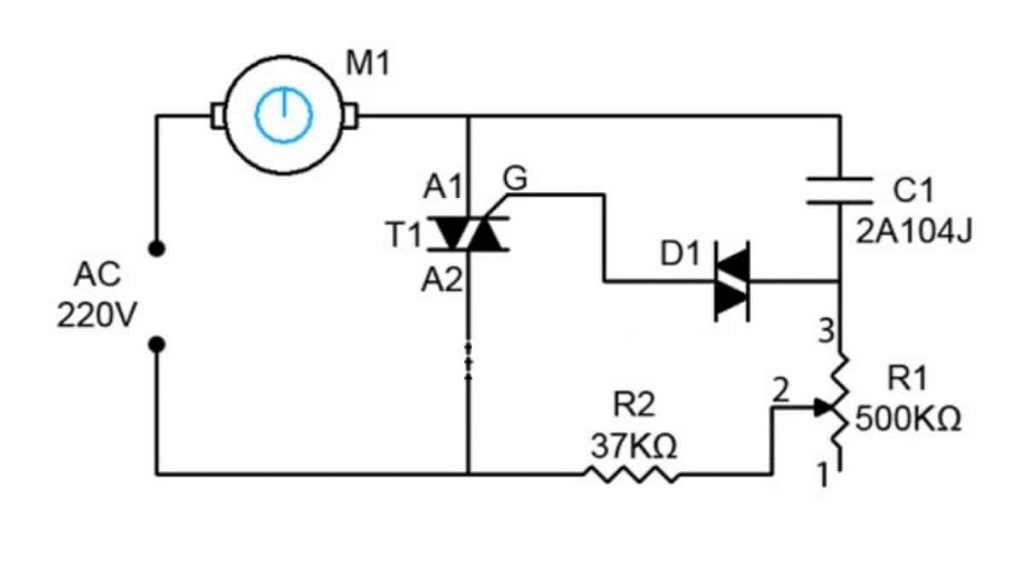 10):
10):
где α
— угол запаздывания включения тиристоров.
Изменяя
угол запаздывания с помощью блока
управления, можно изменять постоянное
напряжение на якоре двигателя, т. е.
постоянный ток в цепи якоря Iя.
В свою очередь это приводит к изменению
вращающего момента на валу двигателя
(13.2).
Индуктивная катушка
в цепи якоря служит для уменьшения
пульсаций тока.
Система управления асинхронным тиристорным электроприводом
1. Постановка задачи.
Системы «Тиристорный преобразователь напряжения — асинхронный двигатель» («ТПН-АД») широко используются при построении устройств плавного пуска АД. Существующие устройства плавного пуска, как правило, обеспечивают формирование заданной диаграммы напряжения, ограничение тока или электромагнитного момента [1] двигателя.
При выполнении научно-исследовательской работы, проводимой на кафедре «Электропривод и автоматизация промышленных установок» УГТУ-УПИ, возникла необходимость анализа свойств системы ТПН-АД, имеющей в своём составе контур электромагнитного момента.
В работе рассматриваются вопросы построения системы автоматического регулирования (САР) электромагнитного момента асинхронного двигателя без датчика на его валу, питаемого от ТПН.
2. Описание решения.
Для реализации САР электромагнитного момента двигателя на базе системы ТПН-АД требуется наличие сигнала обратной связи по моменту. Установка датчика момента на валу двигателя, как правило, невозможна из-за повышенной сложности его конструкции. Поэтому возникает задача косвенной оценки момента АД на основе измерения электрических переменных двигателя (напряжение, ток).
Оценка мгновенного значения электромагнитного момента АД может быть получена при использовании следующего выражения:
где т — мгновенное значение электромагнитного момента двигателя; k = 1/ ωs — масштабный коэффициент, определяемый как величина, обратная угловой частоте напряжения на статоре ωs; Ps— активная мощность, потребляемая двигателем, которая может быть определена по выражению
где usa, usb, usc, isa, isb, isc— мгновенные значения напряжений и токов фаз А, В и С статора соответственно; ∆PS — мощность потерь в меди статора, вычисляемая по формуле
где Rs— активное сопротивление фазы обмотки статора.
Структура САР электромагнитного момента приведена на рис. 1. На рис. 1 изображены следующие элементы: РМ — регулятор момента интегрального типа; ФБ — функциональный блок, необходимый по условиям линеаризации и выполняющий операцию извлечения квадратного корня; СИФУ -система импульсно-фазового управления; ВМ — вычислитель момента.
Рис 1. Структура САР электромагнитного момента АД
Описанная система выполнена в виде стенда [2], структура которого показана на рис. 2. Стенд состоит из короткозамкнутого асинхронного двигателя, тиристорного преобразователя напряжения, датчиков мгновенных значений тока is(ДТ) и напряжения us (ДН) и персонального компьютера (ПК), оснащенного платой сбора данных Nl PCI-6221 с системой LabVIEW.
Рис. 2. Структура исследовательского стенда
При практической реализации САР момента нет необходимости в выдаче управляющего преобразователем сигнала на выбранном такте работы АЦП (т.е. каждые 0,0001 с) поэтому вместо выражений (2) и (3) использованы следующие алгоритмы:
расчёт которых проводится на периоде сети, равном 0,02 с. Стенд позволяет реализовать практически любые типы САР системы ТПН-АД путём модификации его программного обеспечения.
Стенд позволяет реализовать практически любые типы САР системы ТПН-АД путём модификации его программного обеспечения.
Особенностью ПО стенда является то, что часть программы, отвечающая за обработку сигналов, выполнена в виде функций динамически подключаемой библиотеки (DLL), созданной в системе программирования Delphi. В функциях библиотеки реализованы следующие задачи: определение электромагнитного момента двигателя по выражениям (1), (4) и (5), расчет регулятора момента и функционального блока.
Средствами LabVIEW выполнен опрос датчиков, выдача управляющих воздействий, отображение временных диаграмм всех сигналов (от датчиков и вычисленных программой) и формирование заданного значения момента двигателя. Код программы системы управления электроприводом показан на рис. 3.
Рис. 3. Программа системы управления, реализованная в LabVIEW
Информация от датчиков тока и напряжения передается в узел вызова основной функции библиотеки в виде указателей на массивы, содержащие значения соответствующих сигналов, при этом рабочая частота АЦП и размер буферов выбраны таким образом, что массивы содержат значения сигналов на одном периоде сети (0,02 с).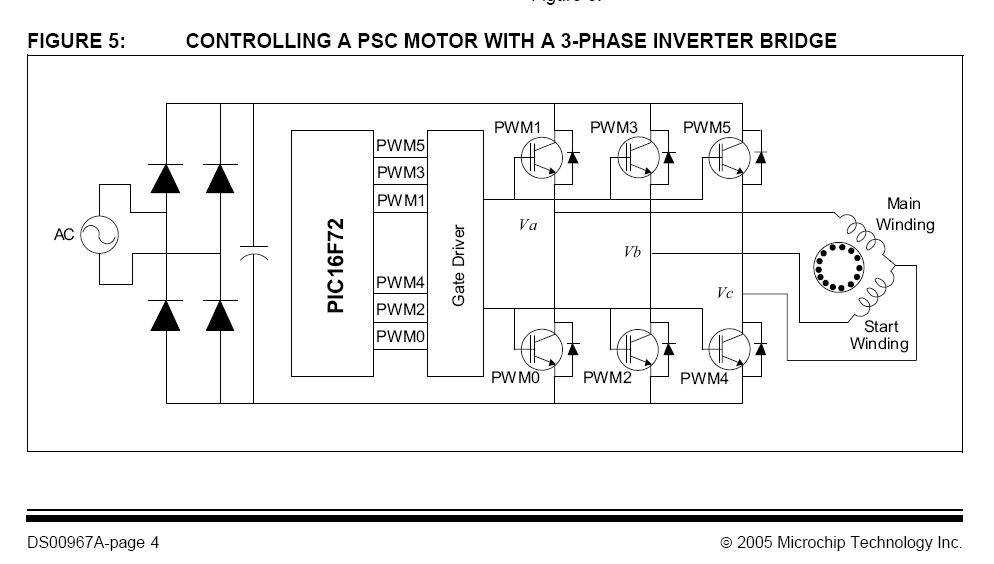 На рис. 4. показано диалоговое окно параметрирования узла вызова основной функции библиотеки, производящей все расчёты и формирующей сигнал управления преобразователем.
На рис. 4. показано диалоговое окно параметрирования узла вызова основной функции библиотеки, производящей все расчёты и формирующей сигнал управления преобразователем.
Рис. 4. Параметры узла вызова основной функции библиотеки
Функции библиотеки рассчитываются на частоте 50 Гц, сигналы датчиков тока и напряжения оцифровываются на частоте 10 кГц.
Диаграммы пуска электропривода с контуром электромагнитного момента представлены на рис. 5, 6.
Рис. 5. Пуск привода с контуром момента на холостом ходу: 1 — скорость, 2 — электромагнитный момент АД
Рис. 6. Пуск привода с контуром момента при моменте сопротивления на валу Мс = 0,4 Мм: 1 — скорость, 2 — электромагнитный момент АД
Из приведённых диаграмм видно, что темп запуска привода сильно зависит от момента сопротивления на валу двигателя, а поддержание электромагнитного момента двигателя на заданном уровне обеспечивает плавный и безударный пуск двигателя, не гарантируя при этом постоянства темпа его разгона.
Список литературы:
1. Chouffier J., Cornilleau H., Duclos P. Control method for a start-up control unit and an apparatus to make use of this method // United States patent № 5859514, 01.12.1999.
2. Зюзев А. М., Нестеров К.Е. Стенд для исследования системы управления асинхронным тиристорным электроприводом на основе программно-аппаратных средств Natonal Instruments // Материалы пятой международной НПК «Образовательные, научные и инженерные технологийй в среде LabVIEW и технологии National Instruments». Москва: РУДН, 2006. С. 395-399.
Тиристорное управление двигателями — EEEGUIDE.COM
Тиристорное управление двигателями. Для управления двигателем были разработаны различные схемы тиристорного управления в зависимости от типа питания (переменный/постоянный ток), а также типа и размера двигателя.
Для управления двигателем постоянного тока регулируемая мощность постоянного тока от источника переменного тока постоянного напряжения получается с помощью управляемых выпрямителей или преобразователей , использующих тиристоры и диоды. Управление постоянным напряжением достигается за счет включения тиристоров под регулируемым углом по отношению к приложенному напряжению. Этот угол известен как угол обжига а схема управления называется фазовым управлением . Другой базовый метод управления известен как интегрально-цикловое управление . Здесь ток пропускают от источника переменного тока в течение нескольких полных циклов, а затем гасят в течение еще нескольких циклов, при этом процесс повторяется непрерывно. Управление осуществляется путем регулировки соотношения длительности включения и выключения. Этот метод подходит для управления двигателями постоянного тока мощностью в несколько десятков кВт. Линейная коммутация легко применяется для обеих этих схем управления.
Управление постоянным напряжением достигается за счет включения тиристоров под регулируемым углом по отношению к приложенному напряжению. Этот угол известен как угол обжига а схема управления называется фазовым управлением . Другой базовый метод управления известен как интегрально-цикловое управление . Здесь ток пропускают от источника переменного тока в течение нескольких полных циклов, а затем гасят в течение еще нескольких циклов, при этом процесс повторяется непрерывно. Управление осуществляется путем регулировки соотношения длительности включения и выключения. Этот метод подходит для управления двигателями постоянного тока мощностью в несколько десятков кВт. Линейная коммутация легко применяется для обеих этих схем управления.
Методы фазового управления и управления с интегральным циклом также применимы для двигателей переменного тока, для которых не требуется схема преобразователя.
Управление двигателями постоянного тока, питающимися от источника постоянного тока, осуществляется с помощью схемы тиристорного переключения, называемой прерывателем . Контроллер прерывателя периодически открывается и закрывается, при этом управление средним напряжением достигается путем изменения продолжительности включения и выключения. Это обеспечивает эффективное и бесступенчатое управление двигателями. Тиристорное управление двигателями также может работать в режиме рекуперативного торможения. Контроллер прерывателя требует принудительной коммутации тиристора.
Контроллер прерывателя периодически открывается и закрывается, при этом управление средним напряжением достигается путем изменения продолжительности включения и выключения. Это обеспечивает эффективное и бесступенчатое управление двигателями. Тиристорное управление двигателями также может работать в режиме рекуперативного торможения. Контроллер прерывателя требует принудительной коммутации тиристора.
Для управления двигателями переменного тока, питающимися от источника постоянного тока, используются инверторы на основе тиристоров, транзисторов или полевых МОП-транзисторов. Эти схемы переключения передают энергию от источника постоянного тока к нагрузке переменного тока с переменной частотой и/или переменным напряжением. Из-за операции переключения формы сигналов переменного напряжения ступенчатые, гармоники которых отфильтровываются двигателем переменного тока. Поскольку источником питания обычно является переменный ток, полная схема получения мощности с переменным напряжением и частотой включает использование как инвертора, так и преобразователя.
Циклоконвертер представляет собой блок управления для получения мощности переменного напряжения и частоты непосредственно от источника фиксированной частоты без необходимости использования промежуточного каскада постоянного тока. Механизм управления напряжением и частотой представляет собой комбинацию механизмов, используемых в фазоуправляемом преобразователе и инверторе с импульсной модуляцией. Циклопреобразователи, несмотря на привлекательность прямого преобразования переменного тока в переменный, имеют определенные недостатки, из-за которых они не получили широкого распространения. Вот некоторые из этих недостатков: циклопреобразователи могут производить только субчастотный выходной сигнал, они производят выходной сигнал с высоким содержанием гармоник и имеют низкий входной коэффициент мощности. Циклопреобразователи используются для низкоскоростных приводов и для управления линейными двигателями в высокоскоростных транспортных системах.
симистор — Регулирование скорости трехфазного асинхронного двигателя с помощью тиристора
Задавать вопрос
спросил
Изменено
5 лет, 11 месяцев назад
Просмотрено
9к раз
\$\начало группы\$
Я работаю над проектом управления скоростью трехфазного асинхронного двигателя.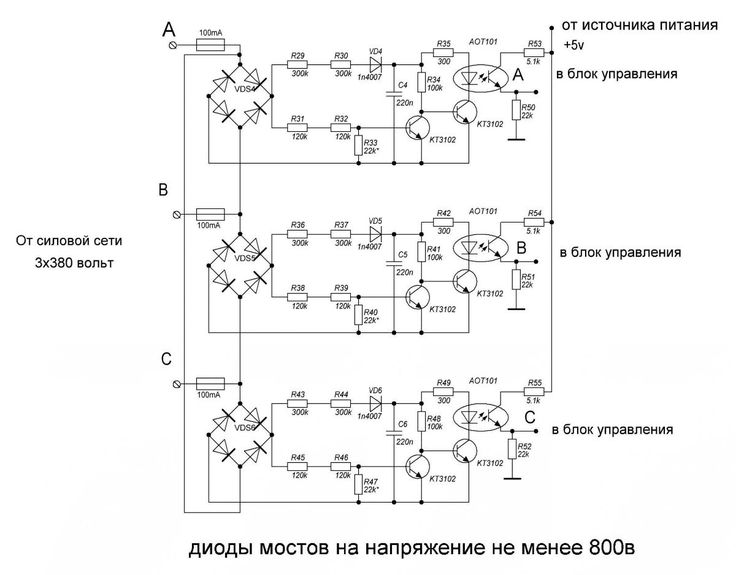 Для управления скоростью двигателя я использую тиристор
Для управления скоростью двигателя я использую тиристор TYN16-600CT . Когда я искал различные исследовательские работы и учебные материалы по управлению скоростью трехфазного асинхронного двигателя, я нашел это моделирование MATLAB…
В этом моделировании я обнаружил, что для каждого тиристора требуется отдельный импульс. Этот пусковой импульс генерируется с использованием этого уравнения,
t = альфа/омега= альфа/2*pi*f
Для простоты, если альфа = 30 градусов , то t= 30/50*360
Мой вопрос: можно ли работать все тиристоры, применяя тот же импульс??
Могу ли я использовать приведенную ниже схему для управления скоростью двигателя??
Но, как я уже сказал, я должен использовать тиристор, а в этой схеме используется симистор.
Итак, если эта схема работает нормально, какие изменения я должен сделать, чтобы заменить симистор на тиристор??
- трехфазный
- симистор
- асинхронный двигатель
- двигатель-контроллер
- тиристорный
\$\конечная группа\$
1
\$\начало группы\$
Можно ли управлять всеми тиристорами одним и тем же импульсом?
Нет. Для управления напряжением асинхронного двигателя импульсы должны быть синхронизированы, чтобы каждая фаза происходила в точке, отстоящей от точки пересечения нуля на одинаковое количество градусов для каждой фазы. Проходит одна и та же часть каждого цикла. Остановка или прохождение определенного количества циклов слишком грубо для управления двигателем.
Для управления напряжением асинхронного двигателя импульсы должны быть синхронизированы, чтобы каждая фаза происходила в точке, отстоящей от точки пересечения нуля на одинаковое количество градусов для каждой фазы. Проходит одна и та же часть каждого цикла. Остановка или прохождение определенного количества циклов слишком грубо для управления двигателем.
Кроме того, управление скоростью асинхронного двигателя путем управления напряжением имеет очень ограниченное применение. Для трехфазных двигателей требуется конструкция с высоким скольжением. Единственными подходящими нагрузками для этого подхода являются вентиляторы и центробежные насосы.
См.:
Расчет значения сопротивления для управления скоростью вентилятора переменного тока
Дополнительные сведения
На приведенной ниже диаграмме показана базовая синхронизация и диапазон управления, необходимые для стробирующих импульсов. Углы задержки относятся к точке А. Цепи управления затвором требуют гальванической развязки друг от друга и от схемы управления.
