Содержание
Типы привода автомобиля и их преимущества
Сегодня мировой автомобильный рынок имеет 3 разновидности привода автомобиля: передний, задний и полный.
Различие разновидностей приводов автомобиля зависит от того, какая ось является ведущей.
Переднеприводные автомобили
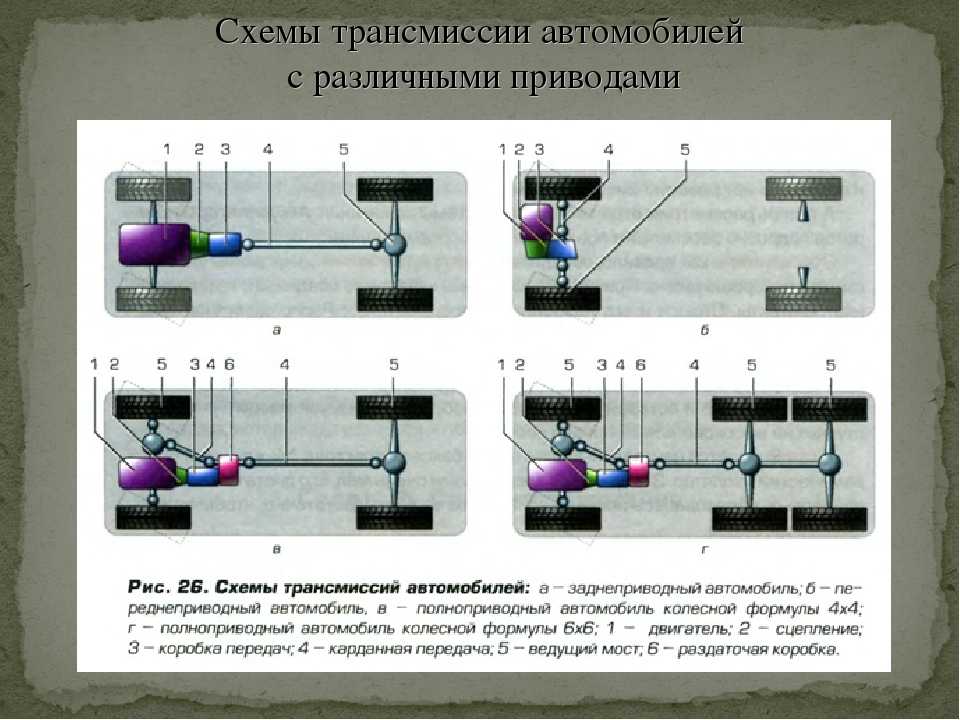
Переднеприводными автомобилями называются автомобили, в которых передняя ось является ведущей, соответственно передние колеса тоже ведущие. Это означает, что двигатель создает крутящий момент и передает его на переднюю ось и на ведущие колеса.
Первые данные о переднеприводных автомобилях были представлены в 30х годах 20 столетия, но данная технология зарекомендовала себя в лучшем образе, поэтому переднеприводные автомобили очень популярны сегодня.
Преимущества переднеприводных автомобилей:
Устройство переднеприводных автомобилей значительно проще, чем полноприводных (например, отсутствие карданного вала). Переднеприводные автомобили имеют меньше деталей, чем полноприводные, что значительно облегчает их эксплуатацию и улучшает ремонтопригодность. К тому же КПД двигателя в переднеприводном автомобиле значительно выше, что обеспечивается малым расстоянием между двигателем и ведущими колесами. Одним из основных преимуществ переднеприводного автомобиля можно назвать лучшую управляемость и точную чувствительность рулевого управления.
Переднеприводные автомобили имеют меньше деталей, чем полноприводные, что значительно облегчает их эксплуатацию и улучшает ремонтопригодность. К тому же КПД двигателя в переднеприводном автомобиле значительно выше, что обеспечивается малым расстоянием между двигателем и ведущими колесами. Одним из основных преимуществ переднеприводного автомобиля можно назвать лучшую управляемость и точную чувствительность рулевого управления.
За счет уменьшения механизмов и деталей при использовании технологии переднеприводных автомобилей можно выиграть в пространственном отношении.
Но как и у всех технологий и деталей у переднеприводного автомобиля есть свои минусы.
Минусы переднеприводного автомобиля:
— Сложная конструкция переднего привода;
— Дорогое техническое обслуживание;
— Слышимая вибрация от двигателя;
— Пробуксовка передних колес при резком разгоне автомобиля.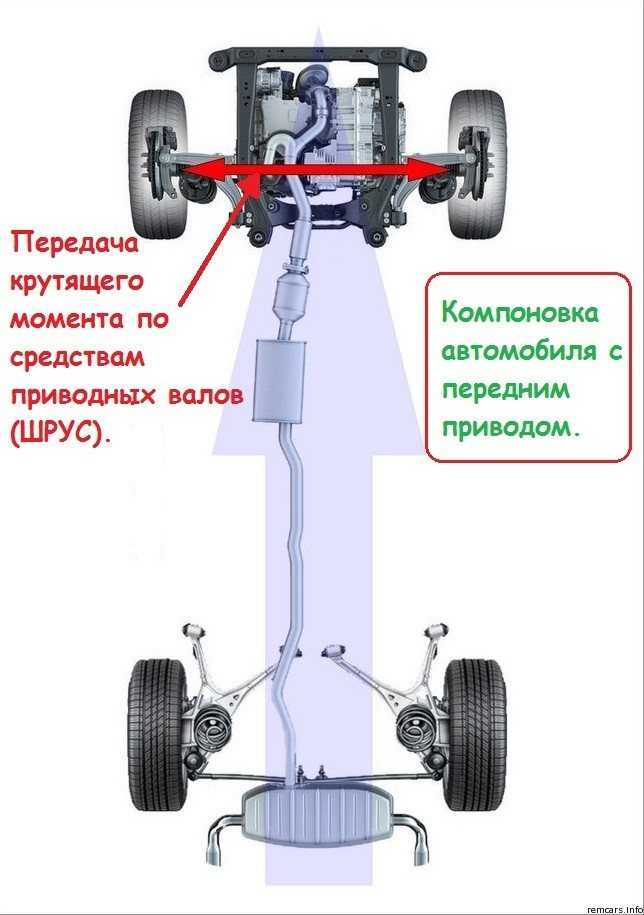
Заднеприводные автомобили
Заднеприводные автомобили отличаются от переднеприводных тем, что ведущей является задняя ось и задние колеса. Привод задних ведущих колес осуществляется за счет передачи крутящего момента от двигателя через коробку передач, карданную передачу, главную передачу на задний мост к главной передаче, которая распределяет крутящий момент по ведущим осям. Заднеприводная конструкция автомобиля обеспечивает динамическую нагрузку на заднюю ось, что дает положительные ходовые качества при движении автомобиля по плохим дорогам (заднеприводные автомобили более проходимые). Правда на скользкой и заснеженной дороге заднеприводные автомобили значительно уступают переднеприводным. А вот при возникновении заноса задний привод поведет себя лучше, и управлять им будет удобнее. Задний привод автомобиля может похвастаться своей надежностью и ремонтопригодностью.
Недостатки заднего привода:
уменьшение пространства в салоне автомобиля за счет необходимости установки тоннеля.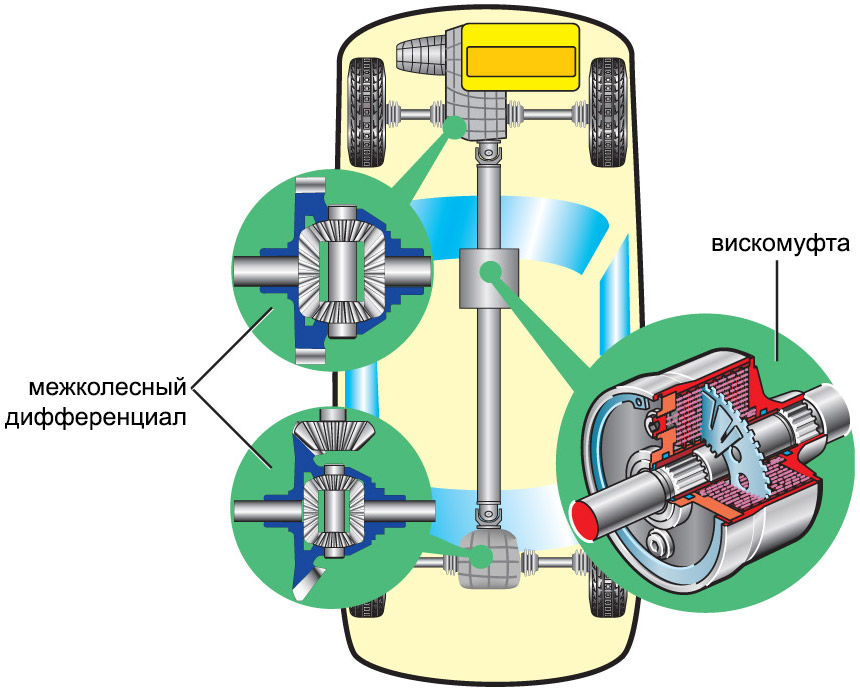
Полноприводные автомобили
Полноприводные автомобили отличаются, как от переднеприводных, так и от заднеприводных автомобилей. В переднеприводных автомобилях ведущими являются и передний и задний мосты. Можно сказать, что полноприводные автомобили имеют все ведущие колеса.
Существует подключаемый полный привод, что очень удобно, так как, при обычном режиме эксплуатации можно задействовать только одну ось (переднюю). В случае необходимости можно задействовать вторую ось, что обеспечит полный привод. Постоянный полный привод подразумевает использование всех колес в качестве ведущих при всех режимах эксплуатации.
Серединой между постоянным полным приводом и подключаемым выступает полный привод по требованию, который включается автоматически.
Плюсы полноприводного типа автомобилей:
— Повышенная проходимость;
— Повышенная устойчивость.
Минусы полноприводных автомобилей:
— Повышенный расход топлива;
— Cложное устройствополноприводного автомобиля.
Отличительной особенностью автомобилей с задним и полным приводом является их скорость (более быстрые). Поэтому спортивные автомобили чаще всего выполняются на базе заднеприводного и полноприводного шасси.
Какой привод выбрать? Плюсы и минусы переднего, заднего и полного привода автомобиля
Начинающему автомобилисту нелегко разобраться во всех технических нюансах. Мы разберём один из важнейших вопросов — какой привод машины выбрать? Рассказываем об особенностях, преимуществах и недостатках каждого типа трансмиссии.
Передний привод
Ещё в 1930-х годах перед инженерами стала непростая задача — как сделать автомобиль дешевле, легче, проще в обслуживании, удобнее в управлении и безопаснее одновременно? Ответом на этот вопрос стала переднеприводная трансмиссия.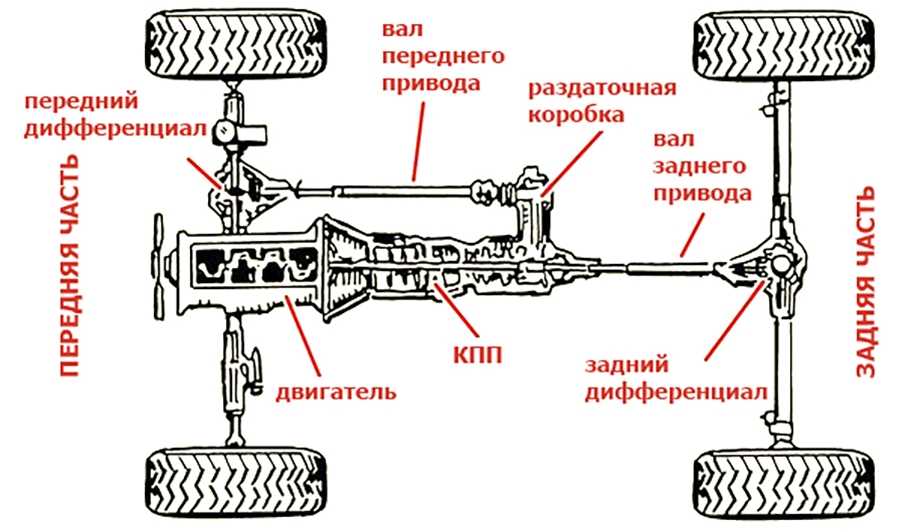 Первыми серийными моделями с такой компоновкой стали Cord L29 1929 года и Citroen 7CV 1934 года.
Первыми серийными моделями с такой компоновкой стали Cord L29 1929 года и Citroen 7CV 1934 года.
Интересно, что в опытных образцах переднеприводных автомобилей использовались современные шарниры равных угловых скоростей (ШРУСы). Но из-за низкого качества сплавов и недостаточной точности обработки металлов они оказались ненадёжными, поэтому от них отказались в пользу коротких карданных валов.
Современная компоновка переднеприводного автомобиля формировалась постепенно. В 1961 году появился компактный хэтчбек Renault 4, в котором крутящий момент передавался колёсам при помощи ШРУСов. В 1959 году был выпущен Austin Mini с поперечным расположением мотора. А в 1974 публике представили Volkswagen Golf, у которого валы двигателя и коробки передач располагались на одном горизонтальном уровне.
Преимущества переднего привода
-
Упрощение конструкции. Снизилась стоимость производства и уменьшилась трудоёмкость обслуживания автомобилей. Именно передний привод сделал личный транспорт массовым и доступным широкой публике.

-
Сокращение массы. Инженерам удалось отказаться от громоздких и тяжёлых карданных валов. Благодаря этому улучшились динамические показатели и снизился расход топлива. Это особенно заметно в бюджетном классе, где преобладают модели малой мощности.
-
Увеличение полезного объёма. Поскольку все компоненты трансмиссии сосредоточены впереди, можно опустить линию пола в салоне, освободив место над головой. Кроме того, на заднюю ось приходится меньше нагрузки, поэтому её грузоподъёмность увеличивается.
-
Повышение проходимости. Основная масса автомобиля приходится на ведущие колёса. Благодаря этому увеличивается площадь пятна контакта, уменьшается вероятность отрыва от дороги и пробуксовки.
-
Предсказуемое поведение машины. Следствие из предыдущего пункта. Поскольку ведущие колёса всегда нагружены, вероятность заноса на мокрой или грязной дороге уменьшается.
Это особенно важно для новичков.

 Это особенно важно для новичков.
Это особенно важно для новичков.
Недостатки переднего привода
-
Сложная схема выхода из заноса. Когда мы теряем управление над автомобилем, то инстинктивно бьём по педали тормоза. В переднеприводных моделях это усугубляет проблему. Правильно повернуть руль в сторону заноса и нажать педаль газа. Чтобы вовремя вспомнить об этом в экстренной ситуации, нужна тренировка.
-
Пробуксовка на старте. Хотя передний привод устойчивее при равномерном движении, в момент резкого ускорения передние колёса разгружаются и начинают проскальзывать.
-
Сложность создания машины с равномерным распределением веса между осями. У большинства переднеприводных машин до 60-70% массы приходится на переднюю осьЭтот пункт тянет за собой сразу две проблемы. Во-первых, водителю приходится иметь дело с недостаточной поворачиваемостью — машина «вяло» реагирует на движения руля. Во-вторых, передние тормозные механизмы изнашиваются намного быстрее, увеличивая расходы на обслуживание.
Исключение — спортивные и премиальные автомобили с более равномерной развесовкой. -
Увеличенный радиус поворота. Поскольку управляемые колёса связаны с силовым агрегатом ШРУСами, они не могут сильно смещаться относительно продольной оси — это приведёт к поломке. Из-за этого ухудшается манёвренность.
-
Ограничения по параметрам двигателя. В тесном подкапотном пространстве переднеприводного автомобиля сложно разместить массивный мотор. Максимальная мощность серийных автомобилей с такой компоновкой — до 300 лошадиных сил, а средняя — около 150 л.с.
 Исключение — спортивные и премиальные автомобили с более равномерной развесовкой.
Исключение — спортивные и премиальные автомобили с более равномерной развесовкой.
Задний привод
В конце XIX века не существовало технологий и материалов, позволяющих передавать крутящий момент через управляемые колёса. Поэтому единственно правильным решением оказался серийный выпуск заднеприводных автомобилей.
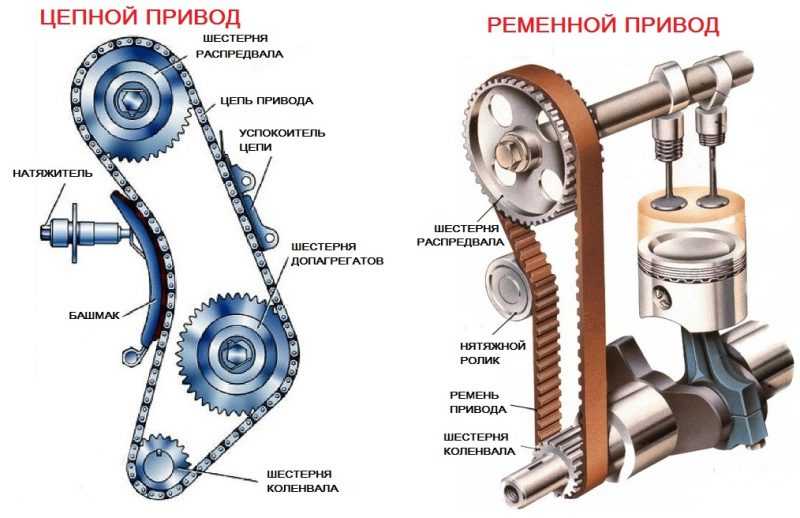
Первые образцы сильно отличались от тех моделей, что мы видим на дорогах сегодня. Начнём с того, что их мотор располагался в пределах колёсной базы, но ближе к задней оси. А ещё для передачи крутящего момента использовалась цепная или ременная передача. Такие машины были неустойчивыми за счёт смещения центра тяжести назад. Кроме того, огромные потери мощности в трансмиссии снижали динамические показатели и увеличивали расход топлива.
А ещё для передачи крутящего момента использовалась цепная или ременная передача. Такие машины были неустойчивыми за счёт смещения центра тяжести назад. Кроме того, огромные потери мощности в трансмиссии снижали динамические показатели и увеличивали расход топлива.
Первый шаг в сторону современной конструкции сделал инженер Луи Рено, который использовал надёжную и эффективную карданную передачу. Поэтому ещё в 1910-х годах начали массово появляться автомобили «классической» компоновки — с передним расположением двигателя и задним приводом. Но заднемоторные модели долго удерживались на рынке — их популярность стала снижаться лишь в 1950-е годы.
Преимущества заднего привода
-
Более равномерное распределение массы. Поворачиваемость автомобиля ближе к «нейтральной», поэтому он предсказуем в поворотах. Кроме того, тормозные механизмы изнашиваются равномерно, что оптимизирует расходы на обслуживание. В спортивных машинах даже используется компоновка Transaxle — двигатель смещён назад, а коробка передач выполнена в одном корпусе с редуктором задней оси.
Это позволяет приблизить соотношение масс к эталонным 50:50. -
Простота действий в критической ситуации. Логика выхода из заноса совпадает с инстинктивными действиями водителя — нужно начать торможение и повернуть руль в противоположную сторону. Поэтому избежать аварии намного проще.
-
Лучшая динамика разгона. При нажатии педали газа автомобиль слегка «приседает» назад. В такой ситуации снижается вероятность пробуксовки, что позволяет реализовать большую мощность двигателя.
-
Более эффективный подъём в гору. На уклонах основная нагрузка достаётся ведущим колёсам. Это улучшает динамику разгона и сокращает расход топлива на сложных маршрутах.
-
Меньший радиус разворота. Управляемые колёса не связаны с силовым агрегатом, поэтому они поворачиваются на больший угол, делая автомобиль более манёвренным.
 Это позволяет приблизить соотношение масс к эталонным 50:50.
Это позволяет приблизить соотношение масс к эталонным 50:50.
Полный привод
В довоенные годы полноприводные автомобили Spyker, Dailmler и Miller блистали на гоночных треках. Однако минусы полного привода тогда перевешивали плюсы — такие машины были слишком сложны для серийного производства. Первым массовым полноприводным автомобилем было купе Jensen FF, выпускавшееся в Британии в 1966 году. На нём обкатывались многие необычные инженерным решения, поэтому оно было ненадёжным и неудобным. Поэтому все лавры получило другое полноприводное купе — Audi Quattro. Его конструкция была намного проще, поэтому автомобиль выпускался крупными сериями.
Однако минусы полного привода тогда перевешивали плюсы — такие машины были слишком сложны для серийного производства. Первым массовым полноприводным автомобилем было купе Jensen FF, выпускавшееся в Британии в 1966 году. На нём обкатывались многие необычные инженерным решения, поэтому оно было ненадёжным и неудобным. Поэтому все лавры получило другое полноприводное купе — Audi Quattro. Его конструкция была намного проще, поэтому автомобиль выпускался крупными сериями.
Что касается внедорожников, их история началась с армейских моделей 1930-х годов. Эти неприхотливые модели были серийными, но речи о комфорте и надёжности не шло — приоритетом были простота производства и обслуживания. Первые гражданским внедорожником был британский Land Rover 1948 года, который предполагалось продавать фермерам и мелким предпринимателям. Впоследствии об утилитарном назначении полноприводных автомобилей стали забывать — они превратились в дорогие роскошные модели.
Сейчас очень популярны модели с подключаемым приводом на передние или задние колёса. В большинстве случаев они ведут себя как обычные автомобили, описанные выше. И только при необходимости такие машины становятся полноприводными. Чаще всего переключением режимов занимается электроника, но в большинстве моделей есть и функция ручного управления.
В большинстве случаев они ведут себя как обычные автомобили, описанные выше. И только при необходимости такие машины становятся полноприводными. Чаще всего переключением режимов занимается электроника, но в большинстве моделей есть и функция ручного управления.
Преимущества полного привода
-
Повышенная проходимость. Крутящий момент передаётся на все колёса, поэтому машина может продолжать движение в глубокой грязи, на рыхлом песке и на скользкой траве. Если у неё есть блокирующиеся дифференциалы, достаточно, чтобы сцепление с поверхностью было хотя бы у одного колеса.
-
Улучшенная управляемость. Такой плюс полного привода особенно заметен на скользкой поверхности. Автомобиль более устойчив в поворотах во время дождя или гололёда, что позволяет развивать более высокую скорость.
Недостатки полного привода
-
Сложность конструкции. Помимо карданных валов, автомобилю нужны раздаточная коробка и межосевой дифференциал.
В результате он становится более дорогим и требует больше усилий в обслуживании. -
Увеличенная масса. Один из главных минусов полного привода. Тяжёлый автомобиль медленнее разгоняется и расходует больше топлива.
-
Сложность вывода из заноса. Полноприводная машина дольше остаётся управляемой на скользком покрытии. Но после начала заноса вернуть её на прежнюю траекторию нелегко. На помощь приходят электронные системы стабилизации и муфты, перераспределяющие крутящий момент в режиме реального времени. Но и они не всесильны. Поэтому у начинающих водителей часто возникает ложное чувство вседозволенности. Считая полный привод стопроцентной защитой от заноса, они могут решиться на рискованные манёвры и попасть в серьёзную аварию.
 В результате он становится более дорогим и требует больше усилий в обслуживании.
В результате он становится более дорогим и требует больше усилий в обслуживании.
Какой тип привода выбрать?
Передний привод подходит для размеренного движения без резких ускорений и динамичных манёвров. Он упрощает автомобиль, оптимизирует расходы на обслуживание и помогает освободить место в салоне.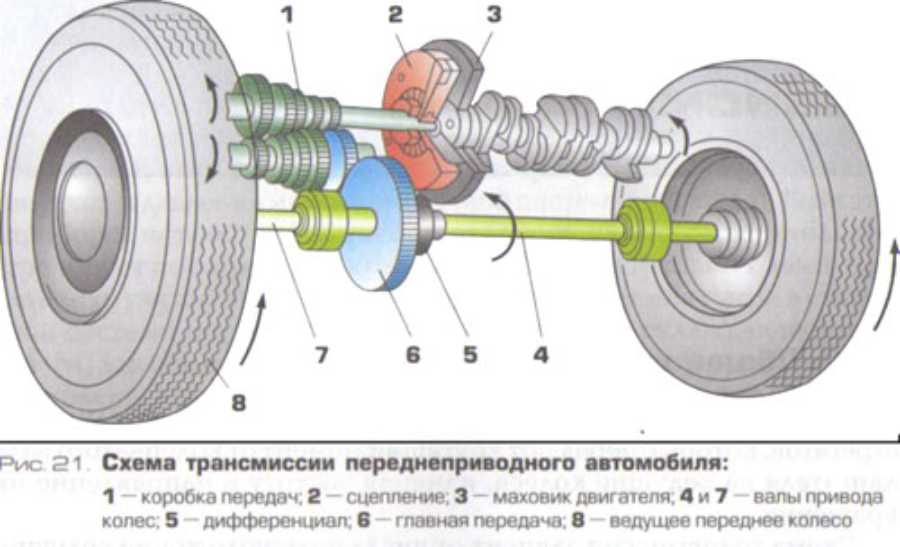 Задний привод подойдёт любителям скоростной езды. Машина с ним лучше управляется и эффективнее разгоняется. А вот полноприводные автомобили отличаются повышенной проходимостью и безопасностью на скользких покрытиях. Но нужно помнить, что они получаются более дорогими и тяжёлыми.
Задний привод подойдёт любителям скоростной езды. Машина с ним лучше управляется и эффективнее разгоняется. А вот полноприводные автомобили отличаются повышенной проходимостью и безопасностью на скользких покрытиях. Но нужно помнить, что они получаются более дорогими и тяжёлыми.
23.12.2021
Понимание вашей трансмиссии RWD, FWD, AWD
СОВЕТЫ ВЛАДЕЛЬЦУ АВТОМОБИЛЯ
9 июля 2021 г.
При выборе нового автомобиля необходимо учитывать несколько моментов. Одним из наиболее важных является поиск подходящей трансмиссии для поиска новых дорог. Каждый из них имеет свои преимущества и недостатки, и важно понимать каждый, чтобы принять правильное решение для вас. Четыре различных типа трансмиссии: полный привод (AWD), передний привод (FWD), задний привод (RWD) и 4WD (полный привод).
Передний привод — FWD Значение
FWD означает, что мощность двигателя передается на передние колеса вашего автомобиля. При FWD передние колеса тянут автомобиль, а задние колеса не получают мощности сами по себе. Плюсы переднеприводных автомобилей заключаются в том, что они обычно лучше экономят топливо и выделяют меньше углекислого газа. Поскольку вес двигателя приходится на ведущие колеса, автомобиль с передним приводом может поддерживать лучшее сцепление с дорогой на снегу. Тем не менее, энтузиасты производительности утверждают, что переднеприводные автомобили менее приятны в управлении.
Задний привод — RWD Значение
RWD означает, что мощность двигателя передается на задние колеса, а задние колеса толкают автомобиль вперед. Передние колеса не получают никакой мощности и могут свободно маневрировать автомобилем. Из-за того, что вес автомобиля с задним приводом распределен более равномерно, чем у автомобиля с передним приводом, создается лучший баланс веса. Вот почему большинство спортивных автомобилей, таких как Corvette и Camaro, имеют задний привод и более увлекательны в управлении. Недостатком автомобилей с задним приводом является то, что они плохо работают в плохих погодных условиях, таких как дождь или снег, потому что они более склонны к потере сцепления на скользких дорогах.
Вот почему большинство спортивных автомобилей, таких как Corvette и Camaro, имеют задний привод и более увлекательны в управлении. Недостатком автомобилей с задним приводом является то, что они плохо работают в плохих погодных условиях, таких как дождь или снег, потому что они более склонны к потере сцепления на скользких дорогах.
Четырехколесный привод — 4WD Значение
4WD означает, что мощность двигателя передается на все 4 колеса все время, пока включен 4X4, и есть возможность работать в формате RWD для экономии топлива. Самым большим преимуществом автомобиля с полным приводом является то, что он обеспечивает универсальность и мощность, чтобы справиться с любой местностью и погодными условиями. Минус автомобиля с полным приводом заключается в том, что большую часть времени он работает в формате RWD и имеет меньшее сцепление с дорогой, чем автомобиль с полным приводом.
Полный привод — AWD Значение
Полный привод: трансмиссия, в которой используются передний, задний и межосевой дифференциалы для передачи мощности на все четыре колеса автомобиля.
Как следует из названия, полноприводные системы постоянно приводят в движение как передние, так и задние колеса. Но на практике на самом деле есть два типа трансмиссий, которые называются AWD. На самом деле все колеса постоянно приводятся в движение, и некоторые производители называют это постоянным полным приводом. Второй, часто называемый неполным полным приводом или автоматическим полным приводом, большую часть времени работает в режиме полного привода, при этом мощность передается на все четыре колеса только тогда, когда требуется дополнительный контроль тяги.
Независимо от вашего выбора трансмиссии, помните, что зимой всегда важно иметь хороший комплект зимних шин.
Типы приводов, особенности и принципы (двигатели и приводы)
В этом разделе мы кратко рассмотрим различные типы приводов с регулируемой скоростью, используемые в промышленности. По большей части электронные приводы переменного и постоянного тока сегодня доминируют в производственных и коммерческих приложениях HVAC.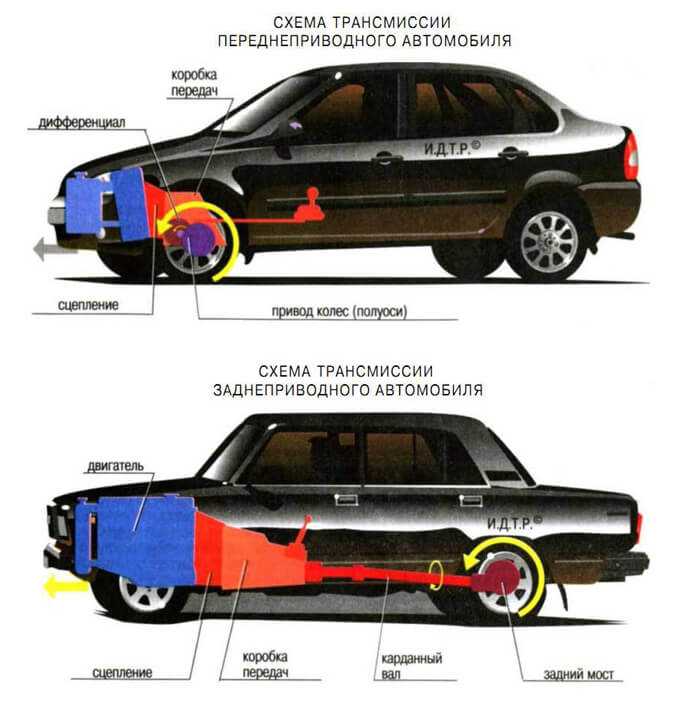 Этот краткий обзор технологий привода поможет вам, если вы столкнетесь с любым из этих типов в будущем. Кроме того, мы также рассмотрим преимущества и ограничения каждого типа. Мы будем рассматривать следующие типы приводов: механические, гидравлические и электрические/электронные (вихретоковая связь, вращающийся постоянный ток, преобразователи постоянного тока и переменный ток переменной частоты).
Этот краткий обзор технологий привода поможет вам, если вы столкнетесь с любым из этих типов в будущем. Кроме того, мы также рассмотрим преимущества и ограничения каждого типа. Мы будем рассматривать следующие типы приводов: механические, гидравлические и электрические/электронные (вихретоковая связь, вращающийся постоянный ток, преобразователи постоянного тока и переменный ток переменной частоты).
Механический
Механические приводы с регулируемой скоростью, вероятно, были первым типом привода, появившимся в промышленной среде. На рис. 1-7 показан базовый механический привод с регулируемой скоростью.
Рис. 1-7. Механический привод с переменной скоростью
Как видно на рис. 1-7, механический привод работает по принципу шкивов с переменным шагом. Шкивы обычно подпружинены и могут расширяться или сужаться в диаметре с помощью рукоятки (показана слева от двигателя переменного тока с постоянной скоростью). Механический привод по-прежнему получает питание от источника переменного тока — обычно трехфазного переменного тока. Затем трехфазный переменный ток подается на двигатель переменного тока с фиксированной скоростью. Возможность изменения диаметра одного или обоих шкивов дает этому приводу возможность изменять выходную скорость (показано в нижней части рис. 1-7). Принцип переменной скорости точно такой же, как у шестерен 15-скоростного велосипеда. При переключении передач цепь проскальзывает на звездочку большего или меньшего диаметра. Когда это происходит, более высокая или более низкая скорость достигается практически при одинаковой входной мощности.
Затем трехфазный переменный ток подается на двигатель переменного тока с фиксированной скоростью. Возможность изменения диаметра одного или обоих шкивов дает этому приводу возможность изменять выходную скорость (показано в нижней части рис. 1-7). Принцип переменной скорости точно такой же, как у шестерен 15-скоростного велосипеда. При переключении передач цепь проскальзывает на звездочку большего или меньшего диаметра. Когда это происходит, более высокая или более низкая скорость достигается практически при одинаковой входной мощности.
Несколько лет назад преимуществами этого типа привода были низкая стоимость и возможность легкого обслуживания устройства. Многие техники любили работать над механическими проблемами. Неисправность была довольно очевидной. Однако преимущества вчерашнего дня превратились в ограничения сегодняшнего дня. Механические устройства имеют тенденцию к поломке, что требует обслуживания и простоя. КПД установки может варьироваться от 90% до 50% и ниже. Это происходит из-за возможного проскальзывания ремня на шкивах (иногда называемых шкивами).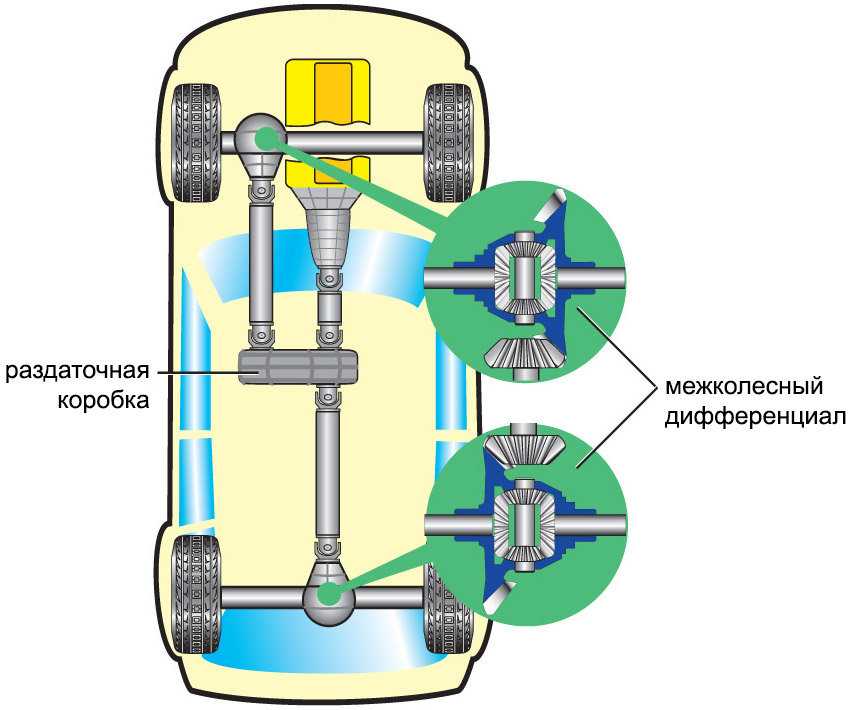 Иногда диапазон скоростей может быть ограничением из-за настроек фиксированного диаметра, характерных для механики устройства. Размер также может быть ограничением. Обычно это устройство устанавливалось на пол, но иногда оно имело высоту 3-5 футов для общего применения. Размер и вес могут препятствовать использованию этого устройства в местах, которые потребуются для установки привода.
Иногда диапазон скоростей может быть ограничением из-за настроек фиксированного диаметра, характерных для механики устройства. Размер также может быть ограничением. Обычно это устройство устанавливалось на пол, но иногда оно имело высоту 3-5 футов для общего применения. Размер и вес могут препятствовать использованию этого устройства в местах, которые потребуются для установки привода.
Гидравлические приводы
Гидравлические приводы были и остаются рабочей лошадкой во многих областях обработки и производства металлов. Небольшой размер гидравлического двигателя делает его идеальным для ситуаций, когда требуется высокая мощность в очень ограниченном пространстве. Фактически размер гидромотора составляет 1/4-1/3 размера электродвигателя эквивалентной мощности. На рис. 1-8 показан гидравлический привод.
Рис. 1-8. Гидравлический привод
На рис. 1-8 двигатель переменного тока с постоянной скоростью приводит в действие гидравлический насос.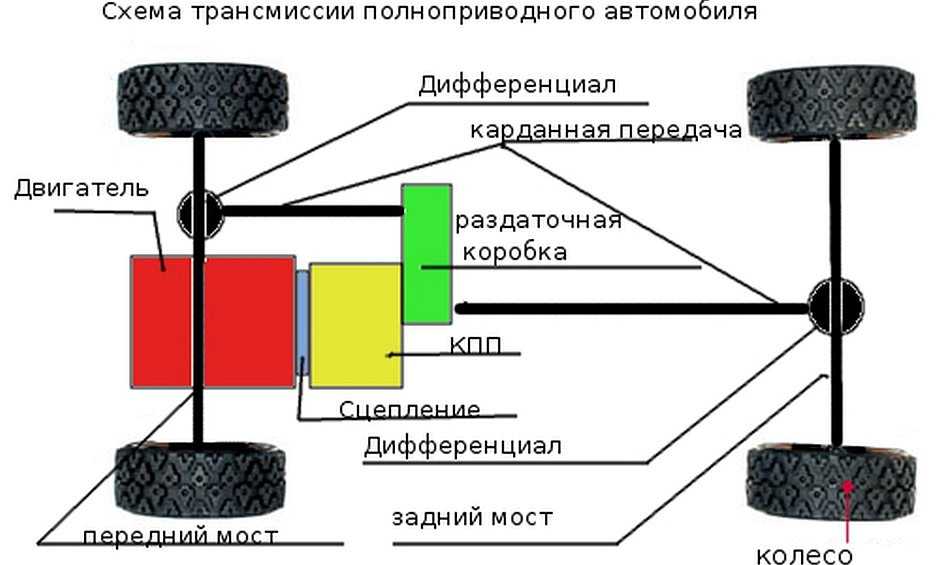 Насос создает необходимое рабочее давление в системе, чтобы гидромотор мог развивать номинальную мощность. Регулирование скорости происходит от регулирующего клапана. Этот клапан работает как водопроводный кран: чем больше клапан открыт, тем больше жидкости проходит через систему и тем выше скорость гидравлического двигателя. Обратите внимание, что в этой системе используется муфта для подключения двигателя переменного тока к насосу.
Насос создает необходимое рабочее давление в системе, чтобы гидромотор мог развивать номинальную мощность. Регулирование скорости происходит от регулирующего клапана. Этот клапан работает как водопроводный кран: чем больше клапан открыт, тем больше жидкости проходит через систему и тем выше скорость гидравлического двигателя. Обратите внимание, что в этой системе используется муфта для подключения двигателя переменного тока к насосу.
Преимуществом данного типа привода является способность гидромотора развивать высокий крутящий момент (крутящее движение вала). Кроме того, он имеет достаточно простую схему управления (вентиль), которая работает в широком диапазоне скоростей
и имеет чрезвычайно малые габариты по сравнению с большинством асинхронных двигателей той же мощности.
Однако система этого типа имеет несколько серьезных ограничений. Наиболее ограничивающим фактором этой системы является потребность в гидравлических шлангах, фитингах и жидкости. Эта система по своей природе склонна к утечкам, что приводит к высоким затратам на техническое обслуживание. Кроме того, практически нет возможности подключить эту систему к электронному контроллеру. Были разработаны автоматические регуляторы клапанного типа, но их использование ограничено в современных высокоскоростных производственных условиях.
Кроме того, практически нет возможности подключить эту систему к электронному контроллеру. Были разработаны автоматические регуляторы клапанного типа, но их использование ограничено в современных высокоскоростных производственных условиях.
Вихретоковые приводы
Вихретоковые приводы уходят своими корнями в тяжелое машиностроение. Шлифовальные круги являются первыми кандидатами для вихретоковых приводов. В этой системе используется процесс преобразования мощности переменного тока в постоянный, что позволяет изменять скорость вращения вала в зависимости от количества преобразованной мощности. На рис. 1-9 показана простая система вихретокового привода.
Рис. 1-9. Система вихретокового привода
Как видно на рис. 1-9, двигатель переменного тока работает с фиксированной скоростью. Это заставляет входной барабан работать с той же скоростью. Функция возбудителя постоянного тока заключается в преобразовании мощности переменного тока в мощность постоянного тока. Затем эта мощность подается на поле связи. Поле связи генерирует магнитное поле в зависимости от того, сколько мощности постоянного тока вырабатывается возбудителем постоянного тока. Чем больше производимая мощность, тем больше создается магнитное поле и тем сильнее притягивается соединительный узел к входному барабану. Мощность, производимая возбудителем постоянного тока, определяется потенциометром задания скорости (потенциометром скорости).
Затем эта мощность подается на поле связи. Поле связи генерирует магнитное поле в зависимости от того, сколько мощности постоянного тока вырабатывается возбудителем постоянного тока. Чем больше производимая мощность, тем больше создается магнитное поле и тем сильнее притягивается соединительный узел к входному барабану. Мощность, производимая возбудителем постоянного тока, определяется потенциометром задания скорости (потенциометром скорости).
Преимущества вихретоковой системы включают начальную стоимость и простой метод управления (обычно 1 скоростной потенциометр). Кроме того, этот тип системы может создавать регулируемый крутящий момент благодаря своей способности довольно точно управлять возбудителем постоянного тока.
Однако несколько ограничений определяют, где и как применять этот тип системы. Основными проблемами являются тепловыделение и энергопотребление. Чтобы соединительный узел
мог магнитно соединяться с входным барабаном, необходимо производить большое количество энергии.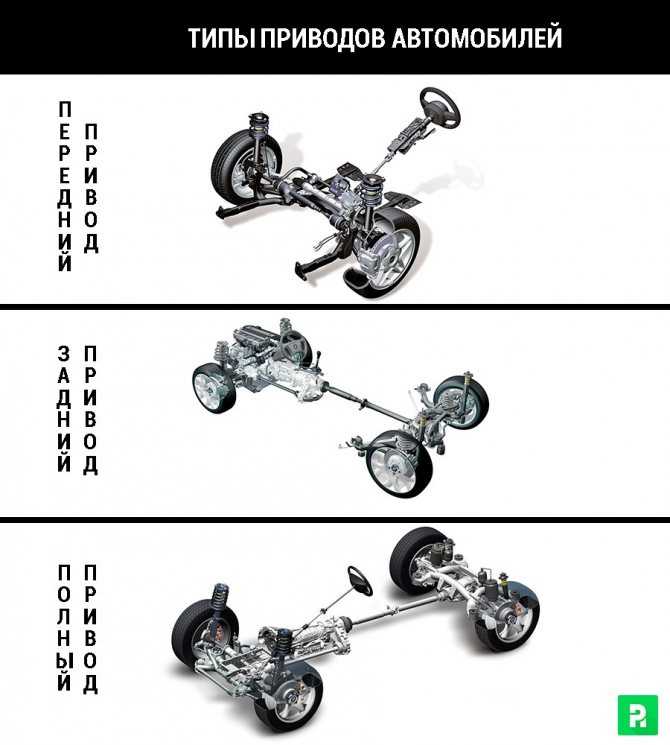 При производстве электроэнергии побочным продуктом является тепло, и экономия энергии не реализуется. По сравнению с другими типами приводов с регулируемой скоростью этот тип может быть в несколько раз больше, что ограничивает места, где он может быть установлен. Размер также является проблемой, когда требуется техническое обслуживание вращающегося оборудования. Обычно требуется ремонт на месте, что обходится дороже, чем доставка устройства обратно в место ремонта.
При производстве электроэнергии побочным продуктом является тепло, и экономия энергии не реализуется. По сравнению с другими типами приводов с регулируемой скоростью этот тип может быть в несколько раз больше, что ограничивает места, где он может быть установлен. Размер также является проблемой, когда требуется техническое обслуживание вращающегося оборудования. Обычно требуется ремонт на месте, что обходится дороже, чем доставка устройства обратно в место ремонта.
Вращающиеся приводы постоянного тока
Эта система восходит к середине 1940-х годов. Система также получила название M-G set, что означает «мотор-генератор». Как видно на рис. 1-10, это описание достаточно точное.
Рисунок 1-10. Вращающийся привод постоянного тока с переменной скоростью
Как видно на рис. 1-10, система с переменной скоростью более сложна, чем вихретоковая система. Двигатель переменного тока с постоянной скоростью заставляет генератор постоянного тока производить мощность постоянного тока. Количество энергии, производимой генератором, зависит от магнитной силы возбудителя поля генератора. Сила возбудителя поля определяется положением регулятора скорости. Как будет показано позже, двигатель постоянного тока требует двух цепей для правильной работы. В этом случае генератор постоянного тока подает питание на главную цепь двигателя постоянного тока (называемую якорем). Двигатель постоянного тока также нуждается в другой цепи, называемой полем. Полевой магнетизм взаимодействует с магнетизмом в главной цепи (якорь), вызывая вращение вала двигателя. Сила магнетизма поля зависит от того, какая мощность вырабатывается возбудителем поля двигателя. Сила возбудителя поля определяется положением регулятора скорости двигателя постоянного тока.
Количество энергии, производимой генератором, зависит от магнитной силы возбудителя поля генератора. Сила возбудителя поля определяется положением регулятора скорости. Как будет показано позже, двигатель постоянного тока требует двух цепей для правильной работы. В этом случае генератор постоянного тока подает питание на главную цепь двигателя постоянного тока (называемую якорем). Двигатель постоянного тока также нуждается в другой цепи, называемой полем. Полевой магнетизм взаимодействует с магнетизмом в главной цепи (якорь), вызывая вращение вала двигателя. Сила магнетизма поля зависит от того, какая мощность вырабатывается возбудителем поля двигателя. Сила возбудителя поля определяется положением регулятора скорости двигателя постоянного тока.
Эта система имеет несколько преимуществ. Несколько лет назад в отрасли вращающихся машин это оборудование было очень традиционным оборудованием. Эта система также имела возможность точно контролировать скорость и имела широкий диапазон скоростей. Обычно в нем использовались двигатели и генераторное оборудование, которые имели очень большую перегрузочную способность по сравнению с современными двигателями.
Обычно в нем использовались двигатели и генераторное оборудование, которые имели очень большую перегрузочную способность по сравнению с современными двигателями.
Однако сегодня система такого типа имеет ряд ограничений. Из-за необходимости трех вращающихся блоков (двигатель переменного тока, генератор постоянного тока и двигатель постоянного тока) эта система подвержена проблемам с обслуживанием. В оборудовании постоянного тока используются устройства, называемые щетками, которые передают мощность от одной цепи к другой. Эти устройства нуждаются в периодической замене, что означает необходимость остановки машины. Эта система также больше, чем многие другие агрегаты с регулируемой скоростью. В современной промышленной среде труднее найти запасные части. В ранних устройствах использовалось устройство преобразования энергии, называемое вакуумной трубкой (высокотемпературная электропроводность), которое очень сложно приобрести в качестве запасной части. Как и следовало ожидать, три вращающихся узла увеличивают потребность в техническом обслуживании механических частей.
Электронные приводы (DC)
Приводы постоянного тока были основой промышленности, начиная с 1940-х годов. В то время электронные лампы обеспечивали технологию преобразования энергии. Вакуумные лампы привели к созданию твердотельных устройств в 1960-х годах. Устройство преобразования энергии, называемое кремниевым управляемым выпрямителем (SCR) или тиристором, теперь используется в современных электронных приводах постоянного тока. На рис. 1-11 показаны основные компоненты простой системы привода постоянного тока.
Рисунок 1-11. Электронный привод постоянного тока
Как видно на рис. 1-11, привод постоянного тока представляет собой простой преобразователь энергии. Он содержит две отдельные силовые цепи, очень похожие на вращающийся блок постоянного тока. Как правило, на приводной блок подается трехфазное питание переменного тока. (Примечание. Некоторые приводы постоянного тока малой мощности принимают однофазное питание.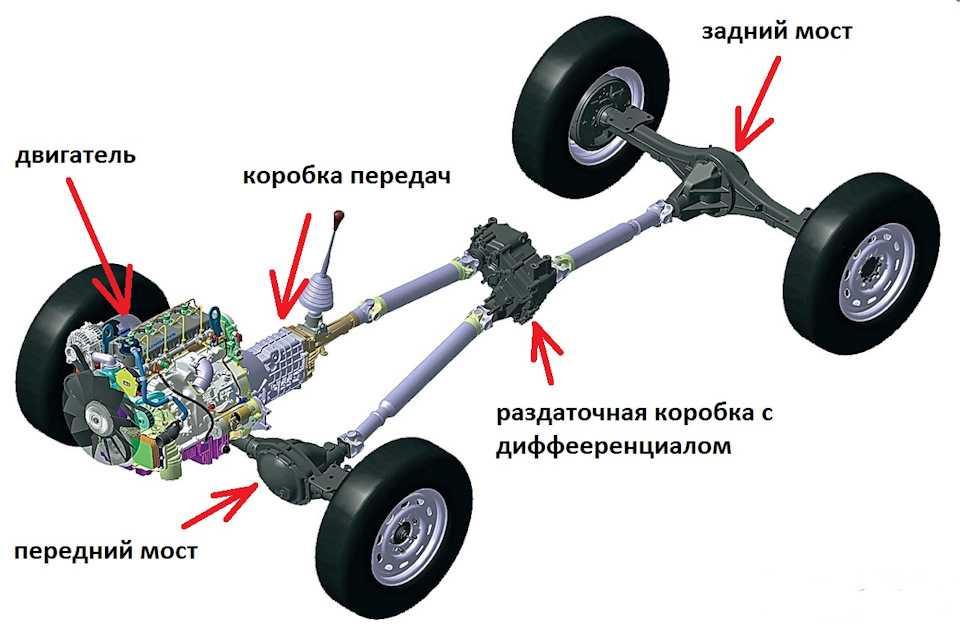 ) В приводном блоке используются тиристоры для преобразования мощности переменного тока в мощность постоянного тока. Регулятор скорости определяет, насколько тиристоры будут проводить мощность. Чем больше тиристоры проводят мощность, тем больше магнитного поля создается в основной цепи двигателя постоянного тока, якоре.
) В приводном блоке используются тиристоры для преобразования мощности переменного тока в мощность постоянного тока. Регулятор скорости определяет, насколько тиристоры будут проводить мощность. Чем больше тиристоры проводят мощность, тем больше магнитного поля создается в основной цепи двигателя постоянного тока, якоре.
В системе привода постоянного тока всегда имеется отдельная магнитная цепь, называемая полем. Сила магнитного поля определяется отдельным возбудителем поля двигателя или постоянным магнитом. Моторное поле обычно сохраняется на полную мощность, хотя в некоторых случаях поле может быть ослаблено, чтобы обеспечить скорость, превышающую нормальную. Взаимодействие между якорем двигателя и полем приводит к вращению вала двигателя. Далее в этом разделе мы более подробно остановимся на технологии привода постоянного тока.
Система привода с регулируемой скоростью такого типа имеет определенные преимущества. Эта зрелая технология доступна уже более 60 лет. Поскольку используется электронная технология, доступно большое количество вариантов управления.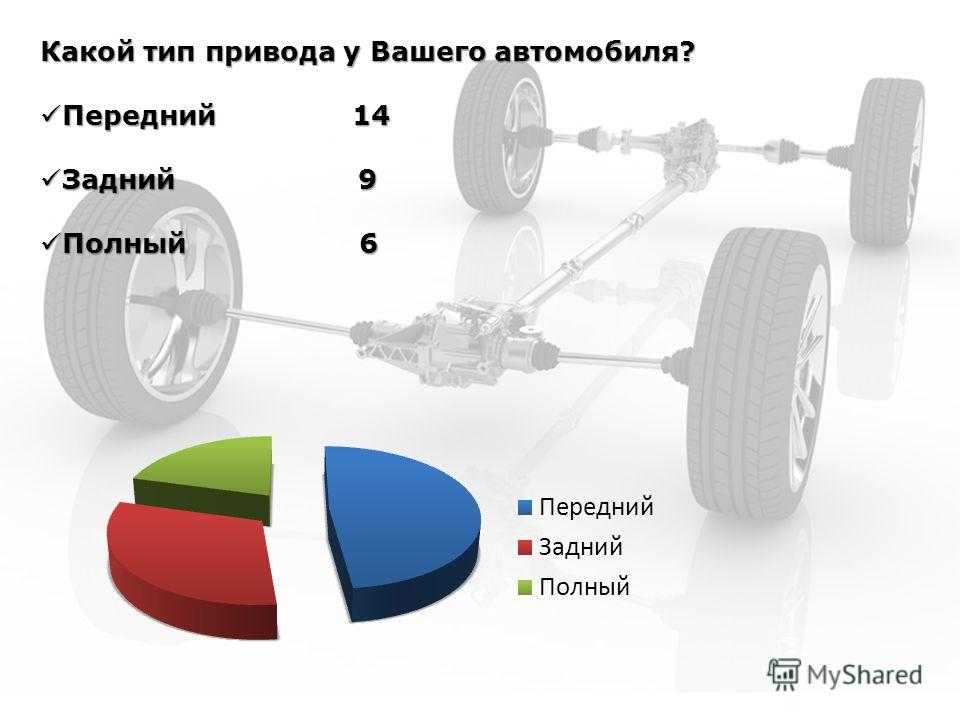
Мониторы, такие как измерители скорости и нагрузки, а также цепи рабочих данных, могут быть подключены для иллюстрации работы привода. К приводу также можно подключить удаленную станцию оператора, включающую изолированные цепи задания скорости и цепи пуска/останова. Этот тип дистанционного управления позволяет получать команды из удаленных мест в здании. Привод постоянного тока обеспечивает приемлемую эффективность по сравнению с другими технологиями с регулируемой скоростью. Кроме того, приводы постоянного тока имеют небольшой блок питания и сравнительно низкую стоимость по сравнению с другими технологиями электронных приводов. Однако при сравнении технологии электронного привода постоянного тока с технологией переменного тока следует учитывать несколько ограничений.
Вероятно, самой большой проблемой систем с приводом постоянного тока является необходимость обслуживания двигателя постоянного тока. Как указано в разделе, посвященном вращающемуся приводу постоянного тока, двигатели постоянного тока требуют регулярного обслуживания щеток и коллекторных стержней. Еще одна проблема, имеющая решающее значение для многих производственных приложений, — необходимость резервного копирования. При выходе из строя привода постоянного тока нет возможности обеспечить работу двигателя, кроме как через подключение другого привода постоянного тока. В наше время эффективного использования энергии при планировании любой установки необходимо учитывать переменный коэффициент мощности привода постоянного тока. Общие эксплуатационные расходы (техническое обслуживание, установка и ежемесячные эксплуатационные расходы) могут быть ограничением при сравнении системы постоянного тока с системой привода переменного тока.
Еще одна проблема, имеющая решающее значение для многих производственных приложений, — необходимость резервного копирования. При выходе из строя привода постоянного тока нет возможности обеспечить работу двигателя, кроме как через подключение другого привода постоянного тока. В наше время эффективного использования энергии при планировании любой установки необходимо учитывать переменный коэффициент мощности привода постоянного тока. Общие эксплуатационные расходы (техническое обслуживание, установка и ежемесячные эксплуатационные расходы) могут быть ограничением при сравнении системы постоянного тока с системой привода переменного тока.
Электронные приводы (AC)
В настоящее время доступны три типа технологий приводов переменного тока. Хотя каждый тип отличается способом преобразования мощности, конечным результатом является использование асинхронного двигателя переменного тока с регулируемой скоростью. Все приводы переменного тока принимают входной переменный ток, преобразуют его в постоянный и изменяют постоянный ток на переменный выходной переменный ток, используя устройство, называемое инвертором (т. е. инвертирует постоянный ток обратно в переменное напряжение). Для целей этого раздела мы ограничим наше обсуждение общим приводом переменного тока.
е. инвертирует постоянный ток обратно в переменное напряжение). Для целей этого раздела мы ограничим наше обсуждение общим приводом переменного тока.
На рис. 1-12 показан типовой привод переменного тока и его основные компоненты.
Основной задачей привода переменного тока является преобразование фиксированного входного сетевого напряжения (В) и частоты (Гц) в переменное выходное напряжение и частоту. Выходная частота определяет скорость вращения двигателя. Комбинация вольт и герц будет определять величину крутящего момента, который будет генерировать двигатель.
Рис. 1-12. Привод переменного тока с регулируемой скоростью
При более внимательном рассмотрении используемых принципов мы обнаружим, что привод переменного тока существенно изменяет мощность переменного тока на мощность постоянного тока. Затем мощность постоянного тока фильтруется и преобразуется обратно в мощность переменного тока, но с переменным напряжением и частотой.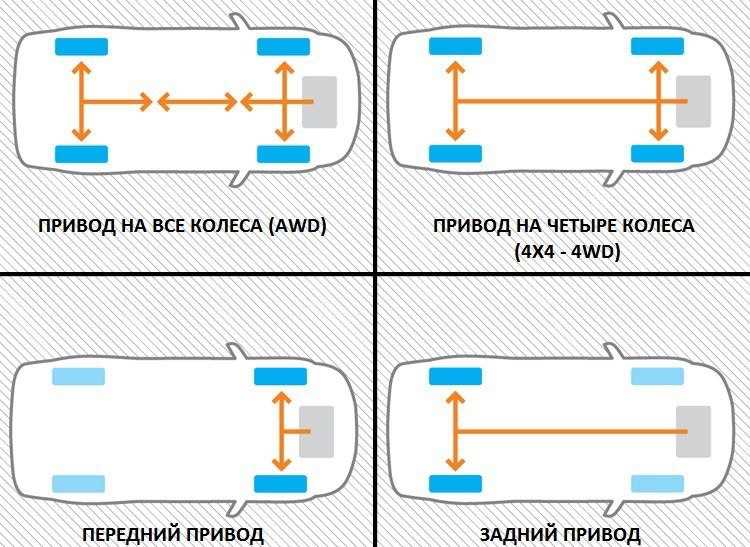 Передняя часть состоит из диодов. Диоды преобразуют мощность переменного тока в мощность постоянного тока. Затем схема фильтра очищает сигнал постоянного тока и отправляет его в выходную секцию. Выходная секция затем инвертирует мощность постоянного тока обратно в переменный ток. Это достигается за счет серии транзисторов. Это специальные транзисторы, которые только включаются или выключаются. Последовательность и продолжительность включения этих транзисторов будут определять выходную мощность привода и, в конечном счете, скорость двигателя.
Передняя часть состоит из диодов. Диоды преобразуют мощность переменного тока в мощность постоянного тока. Затем схема фильтра очищает сигнал постоянного тока и отправляет его в выходную секцию. Выходная секция затем инвертирует мощность постоянного тока обратно в переменный ток. Это достигается за счет серии транзисторов. Это специальные транзисторы, которые только включаются или выключаются. Последовательность и продолжительность включения этих транзисторов будут определять выходную мощность привода и, в конечном счете, скорость двигателя.
В этом типе системы с регулируемой скоростью больше преимуществ, чем ограничений. По сравнению с приводами постоянного тока малогабаритные приводы переменного тока имеют такую же или меньшую стоимость (5 л.с. или меньше). Эффективность преобразования энергии сравнима с эффективностью приводов постоянного тока. Также сопоставима возможность удаленного управления и подключения различных устройств мониторинга. Из-за современной транзисторной технологии размер привода переменного тока равен или даже меньше размера привода постоянного тока такой же мощности (125-150 л.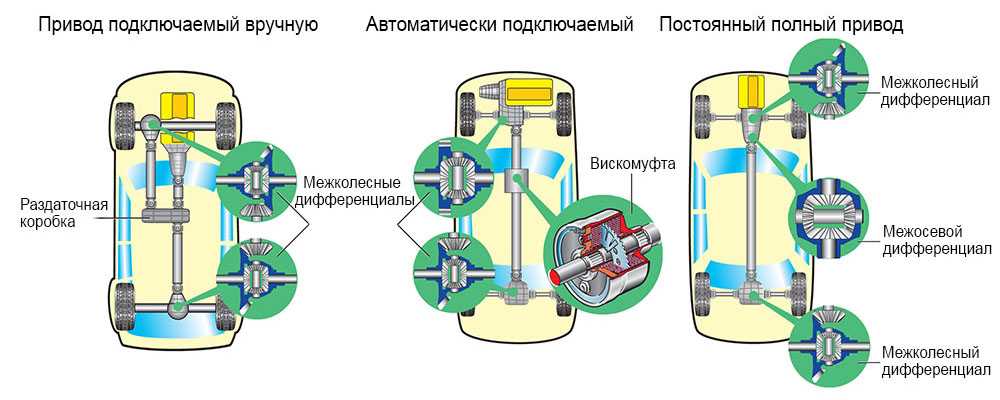 с. или меньше). Одним из основных преимуществ приводов переменного тока является возможность работы двигателя переменного тока в режиме байпаса. Это означает, что, пока привод не работает, двигатель может работать, по существу, от сети. Двигатель будет работать на полной скорости из-за входной мощности сети. Но преимущество заключается в том, что система продолжает работать практически без простоев.
с. или меньше). Одним из основных преимуществ приводов переменного тока является возможность работы двигателя переменного тока в режиме байпаса. Это означает, что, пока привод не работает, двигатель может работать, по существу, от сети. Двигатель будет работать на полной скорости из-за входной мощности сети. Но преимущество заключается в том, что система продолжает работать практически без простоев.
При рассмотрении технологии привода переменного тока могут быть некоторые ограничения. При малой мощности (выше диапазона от 25 до 30 л.с.) приводы переменного тока могут иметь более высокую закупочную цену. Однако затраты на установку могут быть меньше из-за меньшего количества проводки (отсутствует отдельный возбудитель). Некоторые приложения, такие как печать и экструзия, подходят для технологии постоянного тока. Сопоставимые приводы переменного тока, возможно, должны быть на 1 или 2 л.с. больше, чтобы соответствовать возможным требованиям к перегрузке. тема 4, раздел «Приводы переменного тока с управлением по моменту» посвящена приводам переменного тока с векторным и моментным управлением.