

Содержание
253, 251, 161 технические характеристики, модели
Автор Михалыч На чтение 4 мин.
Содержание
- Модели
- КДЭ-163
- КДЭ-253
- КДЭ-251
- КДЭ-161
Модель КДЭ-163 относится к серии железнодорожных кранов, оснащенных дизель-электрическим приводом. Машины поставляются со стрелой различной длины и конфигурации, используются для перемещения штучных грузов. Возможно применение грейферных захватов для погрузки хлыстов деревьев, а также магнитных узлов, позволяющих перегружать отходы стального проката.
Все модели кранов серии КДЭ производились машиностроительным заводом, расположенным в Ленинграде (сейчас Санкт-Петербург). Техника серийно выпускалась с конца 60-х годов, имеет грузоподъемность в пределах 16-25 т.
В основе машины лежит стальная рама, сваренная из большого числа продольных лонжеронов и поперечных балок. В свободном пространстве размещены балластный груз и дополнительное оборудование. Торцевые части оснащены железнодорожными автосцепками, предназначенными для перевозки установки в составе поезда.
Ходовая часть состоит из 2 спаренных тележек с пружинной амортизацией. На тележках установлены тяговые электродвигатели с многоступенчатыми редукторами, которые могут переключаться во время стоянки крана. Источником энергии является дизель-генератор, расположенный на поворотной части машины. Передача электрического тока осуществляется через контактные кольца, установленные в поворотном погоне.
Тормозная система включает в себя стандартные механизмы тележек, которые прижимают колодки к внешней беговой поверхности колес. При движении в сцепке тормоза подключаются к общей сети; управляет ими машинист состава. Дополнительно смонтирован механический привод колодок, который используется во время стоянки крановой установки.
КДЭ-163
Кран КДЭ-163 на железнодорожном (ЖД) ходу предназначен для погрузки материалов и деталей с весом до 16 т. Базовая модель поставлялась с стрелой 15 м и крюковым захватом. По отдельному заказу завод комплектовал машину дополнительными грузоподъемными приспособлениями и удлинительной вставкой стрелы длиной 5 м. При использовании удлинителя допускается перемещение грузов только крюком.
При использовании удлинителя допускается перемещение грузов только крюком.
На поворотной платформе расположен дизель-генератор ДГ 75-3. Установка оборудована системой принудительного жидкостного охлаждения. Для обеспечения температурного режима во время длительной работы применена система охлаждения масла. Радиаторы установлены в 1 блоке, обдуваются многолопастным вентилятором с механическим приводом. В комплект стандартного оборудования входит электрический кабель для подключения к внешнему источнику тока.
Технические характеристики и габариты:
- база тележек — 1850 мм;
- расстояние между центрами тележек — 2950 мм;
- высота сцепки — 1040 мм;
- длина установки (без учета вылета стрелы и сцепок) — 7016 мм;
- ширина — 3120 мм;
- высота подъема крюка — 13,7-18,5 м;
- скорость транспортировки — до 80 км/ч;
- вес — 63,93 т.
КДЭ-253
Кран КДЭ-253 с грузоподъемностью 25 т построен на основе узлов предыдущей модели. Отличием является увеличенная в размерах ходовая платформа и усиленная конструкция стрелового оборудования. Электрическая схема и источники энергии остались неизменными.
Отличием является увеличенная в размерах ходовая платформа и усиленная конструкция стрелового оборудования. Электрическая схема и источники энергии остались неизменными.
Описание параметров крана:
- скорость подъема груза — 5,3-17,8 м/мин;
- время, необходимое для поднятия стрелы до максимума, — 55-60 секунд;
- частота вращения платформы (плавно регулируемая) — 0-1,5 об/мин;
- скорость самостоятельного движения — до 8 км/ч;
- снаряженная масса — 66,41-67,18 т.
КДЭ-251
Кран КДЭ-251 в стандартном оснащении имеет решетчатую стрелу длиной 15 м, предназначенную для перемещения нагрузки весом 25 т. Стрела имеет разъемную конструкцию, допускает установку дополнительных секций, которые доводят длину узла до 20 или 25 м. При использовании стрелы максимальной длины устанавливается гусек, имеющий размер 5 м. В этом случае машина комплектуется крюковой обоймой, рассчитанной на нагрузку до 7,5 т.
На кранах устанавливается дизельный агрегат ДГ 75-3, развивающий мощность 115 л. с. В конструкции узла имеется генератор переменного тока. В конструкции ходовой части и на грузоподъемных лебедках смонтированы асинхронные двигатели мощностью от 3,5 до 30 кВт.
с. В конструкции узла имеется генератор переменного тока. В конструкции ходовой части и на грузоподъемных лебедках смонтированы асинхронные двигатели мощностью от 3,5 до 30 кВт.
Характеристики крана (при установке стрелы длиной 15 м и работе на опорах):
- вылет стрелы — 4,5-14,0 м;
- диапазон грузоподъемности — 5-25 т;
- высота подъема крюка — 9,0-13,5 м;
- скорость поднятия нагрузки — до 12,5 м/мин;
- частота вращения подвижной платформы — до 2 об/мин;
- скорость движения — до 25 км/ч;
- вес установки — 69 т;
- база — 4000 мм;
- ширина колеи — 1524 мм.
КДЭ-161
Кран КДЭ-161 предназначен для перемещения штучных грузов весом до 16 т. В состав силовой установки входит 6-цилиндровый дизельный двигатель К-661, оснащенный механическим нагнетателем. Мотор оснащен специальной соединительной муфтой, которая передает крутящий момент на ротор 3-фазного генератора ECC5-93.
Параметры машины:
- длина стрелы — 10 или 15 м;
- грузоподъемность без опор — не более 10 т;
- скорость хода — 10,2 км/ч;
- мощность двигателя — 115 л.
 с. при 1500 об/мин;
с. при 1500 об/мин; - допустимый радиус закругления путей — 60 м;
- снаряженный вес — 52,1 т.
 с. при 1500 об/мин;
с. при 1500 об/мин;При работе возможно подключение машины к промышленной электросети 3-фазного тока с напряжением 380 В. Для коммутации используется распределительный щит, установленный на раме ходовой части.
Читайте также:
Оцените автора
✅ Кран кдэ 163 технические характеристики
Кран кдэ 163 технические характеристики
§ 34. ЭЛЕКТРИЧЕСКИЕ СХЕМЫ ЖЕЛЕЗНОДОРОЖНЫХ КРАНОВ
Принципиальная электрическая схема дизель-электрических ж/д кранов КДЭ-163 и КДЭ-253
На рис. 64 показана принципиальная электрическая схема дизель-электрических кранов КДЭ-163 и КДЭ-253, являющаяся наиболее полной для кранов серии КДЭ. Проследим по этой схеме выполнение основных операций работы кранов. Условные графические обозначения к электросхеме приведены в табл.![]() 16а.
16а.
С пуском дизеля и установлением его устойчивости работы и рабочего режима генератор Г1 начнет вырабатывать трехфазный переменный ток и на его зажимах установится нормальное напряжение 380—400 В.
С включением вручную трехполюсного линейного переключателя В7 на положение питания от генератора ток подается на силовые и вспомогательные (линии управления, освещения, сигнализации) линии. При этом все вспомогательные линии и линии питания грузового электромагнита включаются непосредственно через переключатель, в то время как все остальные (силовые линии) включаются дополнительно через линейный контактор Р12. Сделано это с целью обеспечения возможности управления краном и безопасной работы грузовым магнитом, так как даже в случае отключения линейного контактора и обесточивания силовых линий грузовой электромагнит остается под током и не сбросит взятый груз. Включают линейный контактор пусковой кнопкой Кн9; при этом осуществлена в целях безопасности так называемая нулевая блокировка, которая позволяет включение линейного контактора и подачу тока в силовые линии лишь в том случае, если все контроллеры и командоконтроллеры управления стоят на нулевых позициях, т. е. в нерабочем положении, и дверь в машинное отделение надежно закрыта.
е. в нерабочем положении, и дверь в машинное отделение надежно закрыта.
С нажатием кнопки Кн9 катушка линейного контактора окажется под током по следующей цепи: предохранитель Прб — провод 02 — катушка Р12 — размыкающие контакты механических блокировок МБ1 и МБ2 — замыкающий контакт блокировки закрытия двери В23 — аварийный выключатель В22 — нулевые контакты контроллера движения В1 и контроллера вращения В2 — нулевые контакты командоконтроллеров ВЗ и В4 — пусковая кнопка Кн9 — провод 01 — предохранитель Прб.
С включением линейного контактора его блок-контакты замкнут цепь питания катушки Р12, минуя нулевые контакты контроллера и командоконтроллеров, тем самым обеспечат возможность перевода их в рабочие положения, т. е. возможность включения механизмов.
При срабатывании любого из четырех реле максимального тока РЗ, Р4, Р5, Р6 срабатывает механическая блокировка МБ1, а при срабатывании реле Р7, Р9 и Р10 срабатывает блокировка МБ2, разрывая цепь питания катушки контактора Р12, отключая его и обесточивая силовую линию.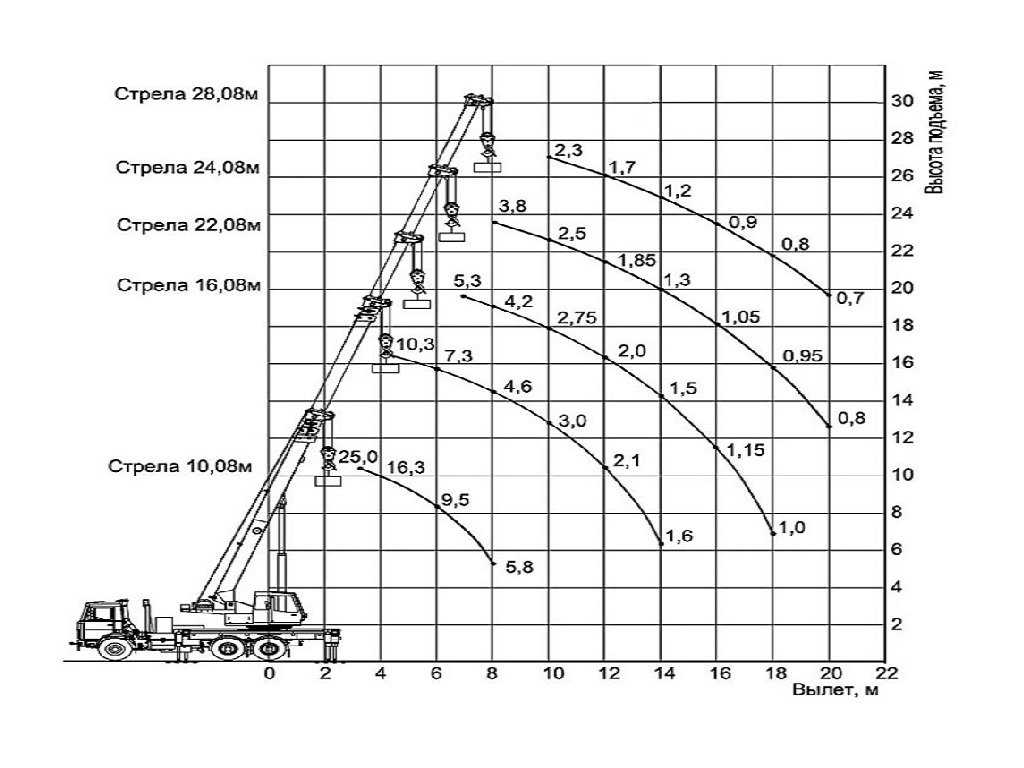
обмотки электродвигателя М10 и его ротор начнет вращаться, обеспечив подъем груза.
В цепь роторной обмотки электродвигателя включено пускорегулирующий резистор R4 и на первой позиции командо-контроллера оно оказывается полностью включенным, поэтому частота вращения электродвигателя будет наименьшей. С переводом командоконтроллера на вторую позицию дополнительно замкнутся его контакты н получит питание катушка Р19 по следующей цепи: предохранитель Прб — провод 02 — замыкающий блок-контакт Р12 — катушка Р19 — замыкающий контакт ВЗ — замыкающий блок-контакт Р12 — провод 01 — предохранитель Прб. Контактор Р19 срабатывает и своими силовыми контактами замыкает часть пускорегулирующего резистора, в результате электродвигатель М10 получит повышенную частоту вращения. С переводом командоконтроллера на третью позицию аналогично сработает контактор Р20, выводя из роторной цепи полностью весь пускорегулирующий резистор, в результате скорость подъема будет наибольшая.
Электродвигатель тормоза М9 подключен непосредственно к зажимам основного электродвигателя, поэтому включается и выключается одновременно с ним, осуществляя растормаживание тормоза при включении основного двигателя и затормаживая при его остановке.
Груз опускается переводом командоконтроллера ВЗ на позиции спуска из-за того, что наименьшая скорость спуска соответствует третьей позиции, т. е. из цепи роторной обмотки полностью выведен пускорегулируюший резистор R4, включение электродвигателя на спуск надо начинать с третьей позиции, переводя на нее быстро командоконтроллер. При установке командоконтроллера на третью позицию спуска будет включен и контактор Р21, катушка которого получит питание по цепи: предохранитель Прб — провод 02 — замыкающий блок-контактор Р12 — катушка Р21 — размыкающий блок-контакт контактора Р22 — контакт командоконтроллера ВЗ — размыкающий контакт выключателя минимального количества витков каната на барабане В32 — размыкающий контакт выключателя ослабления каната В31 (при грейферной работе) или замыкающий контакт выключателя ВЗО (при грузовой работе) — замыкающий блок-контакт Р12 — провод 01 — предохранитель Прб и контактор Р20, замыкающий и выводящий пускорегулирующий резистор R4 из цепи роторной обмотки.
Спуск останавливают быстрым переводом командоконтроллера на нулевую позицию.
Включается и управляется электродвигатель М12 командо-контроллером несколько отлично от управления электродвигателем М10. Имеются два режима работы по спуску груза: нормальный спуск и спуск в режиме динамического торможения с целью получения малых ползучих скоростей спуска. Включение электродвигателя в нормальном режиме совершенно аналогично включению электродвигателя М10, с той лишь разницей, что электродвигатель тормоза МП подключен не непосредственно к зажимам основного двигателя, а самостоятельно через магнитный пускатель Р26, в цепи катушки которого включен выключатель педали растормаживания В35, позволяющий растормаживать тормоз при невключенном электродвигателе Mil, что важно при работе крана грейфером.
Применение полиамида
Полиамид является синтетическим веществом с антифрикционными свойствами. Это дает некоторое преимущество перед металлическими аналогами. Ведь основной причиной выхода из строя элементов стрелового оборудования является износ из-за постоянного трения. Кроме того, полиамидный блок полиспаста 33-100000-001-01
Кроме того, полиамидный блок полиспаста 33-100000-001-01
позволить снизить уровень шума и вибрации в процессе работы крана. В силу низкого влагопоглощения полиамидные компоненты имеет продолжительный срок службы и не боятся перепада температуры. Установка подобной детали сделает работу спецтехники более безопасной и эффективной.
Основные технические данные стреловых полноповоротных кранов
По характеру работы на железнодорожном транспорте наиболее распространены краны на железнодорожном ходу, хотя используются и краны на гусеничном и пневматическом ходу. Краны состоят из двух основных частей: ходовой платформы и подъемно-поворотной рамы со стрелой и грузозахватными устройствами. На поворотной раме также размещаются: силовая установка, основные рабочие механизмы крана, стрела с грузозахватными устройствами и органы управления.
На каждом самоходном стреловом полноповоротном кране как минимум имеются четыре механизма: подъема груза, изменения вылета стрелы, поворота верхней части крана и механизм передвижения крана самоходом. Все этн механизмы могут приводиться в движение от отдельных приводов или в комплексе от одного силового привода.
Все этн механизмы могут приводиться в движение от отдельных приводов или в комплексе от одного силового привода.
На рис. 1, 2 показаны стреловые полноповоротные краны, краны на железнодорожном ходу грузоподъемностью 15, 16 т.
Технической характеристикой крана являются грузоподъемность, мощность силового привода и суммарная мощность установленных двигателей, скорость подъема груза и передвижения крана самоходом, время полного изменения вылета стрелы, частота вращения поворотной рамы крана, наибольшая высота подъема грузозахватного устройства, радиус, описываемый поворотной частью крана, габаритные размеры, масса крана и допустимая скорость транспортировки крана в составе поезда.
Мощность тепловых двигателей (паровых, двигателей внутреннего сгорания) выражается в лошадиных силах (л. с.), а электрических в киловаттах (кВт).
Скорость подъема груза, передвижения самоходом выражается в метрах в 1 мин (м/мин), а скорость транспортировки крана в составе поезда в километрах в 1 ч (км/ч).
Время подъема или опускания стрелы крана от одного крайнего положения до другого выражается в минутах (мин).
Быстрота поворота верхней рамы крана характеризуется частотой вращения.
Вылетом стрелы называется расстояние по горизонтали между осью вращения крана и вертикальной линией, проходящей через точку подвеса груза.
От вылета стрелы зависит величина обслуживаемой краном площади: чем больше вылет, тем больше эта площадь; но с увеличением вылета повышается возможность опрокидывания крана, так как снижается его устойчивость; поэтому при увеличении вылета должен быть уменьшен вес поднимаемого груза. Для повышения устойчивости и возможности поднятия более тяжелого груза
Рис. 1. Дизель-электрический кран КДЭ-161 грузоподъемностью 16 т:
1 — портал крана; 2-кузов крана; 3 -грузовая стрела; 4 — поворотная часть крана; 5 — опорно-поворотное устройство; 6 — ди-зель-генераторная установка; 7 — глушитель; 8 — механизм подъема стрелы; 9 — кронштейн-держатель кабеля; 10 — станция управления; 11 — тележка ходовая; 13 — нижняя ходовая рама; 13 — лебедка грузовая; 14 — аутригер; 15 — механизм передвижения; 16 — бак топливный; 17 — механизм поворота; 18 — сиденье машиниста; 19 — пульт управления
/ — вал грузовых барабанов; 2 — главный вал; 3 — вертикальный вал привода колесных пар; 4- горизонтальный вал механизма подье-•ма стрелы; 5 — горизонтальный вал поворота; 6 — вертикальный вал механизма подъема стрелы; 7 — главный вентиль; 8 — регулятор пара; 9 — ось стрелового барабана; 10 — барабан подъема стрелы; //- внлка; 12 — траверса; 13 — грузовые барабаны; 14- указатель грузоподъемности; 15-верхнее опорное кольцо; 16 — опорные катки; 17- нижнее опорное кольцо; 18-гайка центрального шкворня; 19 — центральный шкворень; 20 — вертикальный вал поворота; 21 — горизонтальный вал привода колесных пар; 22 — кулачковая муфта; 23 — ручной привод тормоза тележкн; 24 — фрикционы поворота; 25 — тормоз поворота; 26 — фрикционы груза; 27 — тормоза груза; 28 — фрикционы привода колесных пар; 29 — тормоз привода колесных пар; 30 — привод воздушного тормоза тележки; 31 — аутригер; I — червяк; И — шестерня механизма подъема стрелы; III — венец поворота; IV — цилиндрическая шестерня вертикального вала поворота; V — цилиндрическая шестерня горизонтального вала привода колесных пар; VI — нижняя коническая шестерня вертикального вала привода колесных пар; VII — коническая шестерня горизонтального вала привода колесных пар; VIII — цилиндрическая разъемная шестерня; IX — цилиндрическая шестерня вала грузовых барабанов; X — цилиндрическая шестерня главного вала; XI — промежуточная шестерня; XII -левая цилиндрическая шестерня горизонтального вала механизма подъема стрелы; XIII — коническая шестерня горизонтального вала механизма подъема стрелы; XIV — коническая шестерня горизонтального вала поворота; XV — коническая шестерня горизонтального вала поворота; XVII — правая цилиндрическая шестерня горизонтального вала механизма подъема стрелы; XVIII —
Технические характеристики железнодорожного крана КДЭ-163 и других модификаций
Модель КДЭ-163 относится к серии железнодорожных кранов, оснащенных дизель-электрическим приводом. Машины поставляются со стрелой различной длины и конфигурации, используются для перемещения штучных грузов. Возможно применение грейферных захватов для погрузки хлыстов деревьев, а также магнитных узлов, позволяющих перегружать отходы стального проката.
Машины поставляются со стрелой различной длины и конфигурации, используются для перемещения штучных грузов. Возможно применение грейферных захватов для погрузки хлыстов деревьев, а также магнитных узлов, позволяющих перегружать отходы стального проката.
Полиамидный блок
Монтаж блока 4-15040-08 для железнодорожных кранов КДЭ-163, КДЭ-253
производится между сегментами стрелы. В процессе работы металлические элементы подвержены негативному воздействию и быстро выходят из строя. Установка полиамидного блока 4-15040-08 позволяет минимизировать данное влияние. Ведь полиамид обладает антифрикционными свойствами, высокой прочностью и надежностью. Присутствие подобных элементов делает работу грузоподъемного механизма эффективной и безопасной.
Плюсы полиамида
- долговечность
- надежность
- морозостойкость
- низкое влагопоглощение
- невоприимчивость
- доступность
Модели
Все модели кранов серии КДЭ производились машиностроительным заводом, расположенным в Ленинграде (сейчас Санкт-Петербург). Техника серийно выпускалась с конца 60-х годов, имеет грузоподъемность в пределах 16-25 т.
Техника серийно выпускалась с конца 60-х годов, имеет грузоподъемность в пределах 16-25 т.
В основе машины лежит стальная рама, сваренная из большого числа продольных лонжеронов и поперечных балок. В свободном пространстве размещены балластный груз и дополнительное оборудование. Торцевые части оснащены железнодорожными автосцепками, предназначенными для перевозки установки в составе поезда.
Ходовая часть состоит из 2 спаренных тележек с пружинной амортизацией. На тележках установлены тяговые электродвигатели с многоступенчатыми редукторами, которые могут переключаться во время стоянки крана. Источником энергии является дизель-генератор, расположенный на поворотной части машины. Передача электрического тока осуществляется через контактные кольца, установленные в поворотном погоне.
Тормозная система включает в себя стандартные механизмы тележек, которые прижимают колодки к внешней беговой поверхности колес. При движении в сцепке тормоза подключаются к общей сети; управляет ими машинист состава. Дополнительно смонтирован механический привод колодок, который используется во время стоянки крановой установки.
Дополнительно смонтирован механический привод колодок, который используется во время стоянки крановой установки.
КДЭ-163
Кран КДЭ-163 на железнодорожном (ЖД) ходу предназначен для погрузки материалов и деталей с весом до 16 т. Базовая модель поставлялась с стрелой 15 м и крюковым захватом. По отдельному заказу завод комплектовал машину дополнительными грузоподъемными приспособлениями и удлинительной вставкой стрелы длиной 5 м. При использовании удлинителя допускается перемещение грузов только крюком.
На поворотной платформе расположен дизель-генератор ДГ 75-3. Установка оборудована системой принудительного жидкостного охлаждения. Для обеспечения температурного режима во время длительной работы применена система охлаждения масла. Радиаторы установлены в 1 блоке, обдуваются многолопастным вентилятором с механическим приводом. В комплект стандартного оборудования входит электрический кабель для подключения к внешнему источнику тока.
Технические характеристики и габариты:
- база тележек — 1850 мм;
- расстояние между центрами тележек — 2950 мм;
- высота сцепки — 1040 мм;
- длина установки (без учета вылета стрелы и сцепок) — 7016 мм;
- ширина — 3120 мм;
- высота подъема крюка — 13,7-18,5 м;
- скорость транспортировки — до 80 км/ч;
- вес — 63,93 т.

КДЭ-253
Кран КДЭ-253 с грузоподъемностью 25 т построен на основе узлов предыдущей модели. Отличием является увеличенная в размерах ходовая платформа и усиленная конструкция стрелового оборудования. Электрическая схема и источники энергии остались неизменными.
Описание параметров крана:
- скорость подъема груза — 5,3-17,8 м/мин;
- время, необходимое для поднятия стрелы до максимума, — 55-60 секунд;
- частота вращения платформы (плавно регулируемая) — 0-1,5 об/мин;
- скорость самостоятельного движения — до 8 км/ч;
- снаряженная масса — 66,41-67,18 т.
КДЭ-251
Кран КДЭ-251 в стандартном оснащении имеет решетчатую стрелу длиной 15 м, предназначенную для перемещения нагрузки весом 25 т. Стрела имеет разъемную конструкцию, допускает установку дополнительных секций, которые доводят длину узла до 20 или 25 м. При использовании стрелы максимальной длины устанавливается гусек, имеющий размер 5 м. В этом случае машина комплектуется крюковой обоймой, рассчитанной на нагрузку до 7,5 т.
На кранах устанавливается дизельный агрегат ДГ 75-3, развивающий мощность 115 л.с. В конструкции узла имеется генератор переменного тока. В конструкции ходовой части и на грузоподъемных лебедках смонтированы асинхронные двигатели мощностью от 3,5 до 30 кВт.
Характеристики крана (при установке стрелы длиной 15 м и работе на опорах):
- вылет стрелы — 4,5-14,0 м;
- диапазон грузоподъемности — 5-25 т;
- высота подъема крюка — 9,0-13,5 м;
- скорость поднятия нагрузки — до 12,5 м/мин;
- частота вращения подвижной платформы — до 2 об/мин;
- скорость движения — до 25 км/ч;
- вес установки — 69 т;
- база — 4000 мм;
- ширина колеи — 1524 мм.
КДЭ-161
Кран КДЭ-161 предназначен для перемещения штучных грузов весом до 16 т. В состав силовой установки входит 6-цилиндровый дизельный двигатель К-661, оснащенный механическим нагнетателем. Мотор оснащен специальной соединительной муфтой, которая передает крутящий момент на ротор 3-фазного генератора ECC5-93.
- длина стрелы — 10 или 15 м;
- грузоподъемность без опор — не более 10 т;
- скорость хода — 10,2 км/ч;
- мощность двигателя — 115 л.с. при 1500 об/мин;
- допустимый радиус закругления путей — 60 м;
- снаряженный вес — 52,1 т.
При работе возможно подключение машины к промышленной электросети 3-фазного тока с напряжением 380 В. Для коммутации используется распределительный щит, установленный на раме ходовой части.
Блок 33-100000-001-01 чугунное литье
В блоках крана применены подшипники с защитными шайбами, заполненные смазкой. Пополнение смазкой в процессе эксплуатации не требуется.
Для предохранения каната от ржавления, а также во избежание преждевременного износа и перетирания отдельных проволок одна о другую и о поверхности блоков канат надо регулярно смазывать канатной смазкой. В качестве канатной смазки можно применять также смесь из 90 % солидола и 10 % битума. При смазке смесь необходимо прогреть до 60 °С. Ориентировочная норма смазочного материала для смазки каната составляет 3г на метр длины и миллиметр диаметра. Смазка тормоза должна производиться не реже, чем раз в месяц. Зимой надо применять зимние сорта смазки, летом — летние. Отступление от этого правила приведет к нарушению режима работы механизма.
Ориентировочная норма смазочного материала для смазки каната составляет 3г на метр длины и миллиметр диаметра. Смазка тормоза должна производиться не реже, чем раз в месяц. Зимой надо применять зимние сорта смазки, летом — летние. Отступление от этого правила приведет к нарушению режима работы механизма.
Железнодорожный кран КДЭ-163
ЖД-кран КДЭ-163
– дальнейшее развитие одного из первых советских дизель-электрических ЖД-кранов КДЭ-151, выпускаемого с начала 60-х годов прошлого века. В КДЭ-163, выпускаемом с 1971 г, были учтены недочеты, выявленные при эксплуатации предыдущих моделей, потом машина получилась более производительной и экономичной. Несмотря на то, что покупка ЖД-крана КДЭ-163 означает, что машине минимум 30 лет, эти краны могут работать еще долго и , если можно так сказать, находятся в прекрасной форме и проработают, при правильной эксплуатации и регулярном техобслуживании еще столько же.
Замена и ремонт стрелы 24-15000
Наиболее частыми симптомами поломки крановой стрелы являются износ осей основания, разрывы в сварных соединениях и визуально заметный изгиб стрелы. Для предотвращения окончательного выхода стрелы из строя, необходимо регулярно осматривать ее, а также не допускать перегруза и столкновения с различными объектами: стенами, деревьями и т. п.
Для предотвращения окончательного выхода стрелы из строя, необходимо регулярно осматривать ее, а также не допускать перегруза и столкновения с различными объектами: стенами, деревьями и т. п.
Обратите внимание, кроме явных признаков, говорящих о неисправностях, существуют и те, которые не так просто найти, как, например, разрыв сваренных деталей. Мы можем прислать опытных специалистов, которые проведут тщательную дефектовку
Описание КДЭ-163
КДЭ-163
– дизель-электрический железнодорожный кран, грузоподъемностью 16 т (при выдвинутых дополнительных опорах). Силовая установка КДЭ-163 – это объединенный гибкой муфтой дизельный двигатель К-661 и генератор ДГ75-3 . Благодаря наличию многомоторного дизельного агрегата кран может самостоятельно передвигаться, даже на довольно большие расстояния, но гораздо экономичнее перевозить кран в составе специального поезда. В случае необходимости этот железнодорожный кран может сам стать источником энергии для других машин и механизмов, что очень удобно, если приходится вести масштабные работы в местности, не имеющей централизованного энергоснабжения.
КДЭ-163
оснащается 15-метровой стальной решетчатой стрелой, имеющей коробчатое сечение. Дополнительная секция может удлинить стрелу до 20 м. Стрела с удлинителем может нести только крюковую обойму, без удлинения она может оснащаться электромагнитным захватом, двухзубым грейфером и специальным крюком для погрузки леса. Покупая ЖД-кран КДЭ-163 позаботьтесь о дополнительном рабочем оборудовании, это существенно расширяет возможности машины и позволяет заменить несколько единиц техники.
КДЭ-163 состоит из двух платформ:
- ходовой, перемещающейся по рельсам и несущей гидравлические упоры для повышения устойчивости крана;
- поворотной, на которой установлены все рабочие органы, силовая установка, кабина машиниста.
Связь между платформами осуществляется посредством поворотной опоры – подшипника большого диаметра, имеющего на одной из полуобойм зубчатый венец, для зацепления с редуктором и передачи крутящего момента на поворотную платформу. Вращение платформы производится при помощи отдельного электромотора. Собственные электродвигатели имеются также у грузовой двухбарабанной лебедки (по одному на каждый барабан, мощность каждого двигателя 22 кВт). Лебедка подъема стрелы также оснащается отдельным электромотором, мощностью 14 кВт.
Вращение платформы производится при помощи отдельного электромотора. Собственные электродвигатели имеются также у грузовой двухбарабанной лебедки (по одному на каждый барабан, мощность каждого двигателя 22 кВт). Лебедка подъема стрелы также оснащается отдельным электромотором, мощностью 14 кВт.
Ходовая платформа крана – это стальная рама установленная на две вагонные тележки. Для 55-тонной машины очень важно иметь надежные тормоза. КДЭ-163
имеет 3 типа тормозов. Одни подключаются когда кран движется в составе спецпоезда, вторые работают когда кран движется своим ходом, а при длительных стоянках
КДЭ-163
блокируется специальным колодочным тормозом, размещенным на раме.
Блок 33-100000-001-01 чугунное литье
В блоках крана применены подшипники с защитными шайбами, заполненные смазкой. Пополнение смазкой в процессе эксплуатации не требуется.
Важно Как сделать навесной тракторный опрыскиватель своими руками: лучшие фирмы, преимущества, схема
Для предохранения каната от ржавления, а также во избежание преждевременного износа и перетирания отдельных проволок одна о другую и о поверхности блоков канат надо регулярно смазывать канатной смазкой. В качестве канатной смазки можно применять также смесь из 90 % солидола и 10 % битума. При смазке смесь необходимо прогреть до 60 °С. Ориентировочная норма смазочного материала для смазки каната составляет 3г на метр длины и миллиметр диаметра. Смазка тормоза должна производиться не реже, чем раз в месяц. Зимой надо применять зимние сорта смазки, летом — летние. Отступление от этого правила приведет к нарушению режима работы механизма.
В качестве канатной смазки можно применять также смесь из 90 % солидола и 10 % битума. При смазке смесь необходимо прогреть до 60 °С. Ориентировочная норма смазочного материала для смазки каната составляет 3г на метр длины и миллиметр диаметра. Смазка тормоза должна производиться не реже, чем раз в месяц. Зимой надо применять зимние сорта смазки, летом — летние. Отступление от этого правила приведет к нарушению режима работы механизма.
Железнодорожные краны КДЭ-161, КДЭ-163, КДЭ-253, КДЭ-251
имеют похожую конструкцию, которая состоит из нескольких компонентов. Например, поворотная платформа включает в себя стрелу, А-образную раму и кабину оператора. Также сюда входят опорно-поворотный механизм, рабочее оборудование и ходовые тележки. Стоит знать, что
блок 24-10030-20
располагается в портале железнодорожного крана и позволяет упростить работу стрелового оборудования.
electric%20crane%20operator — английское определение, грамматика, произношение, синонимы и примеры
(11) Общий подход к предотвращению и управлению кризисом электричества требует общего понимания государствами-членами того, что представляет собой кризис электричества .
не установлен
Почти все развивающиеся страны испытывают политическое и социальное давление с целью обеспечения электроэнергией разрозненных сельских районов.
Если нет чистой электрический , изготовитель должен предоставить средства для выполнения измерения на транспортном средстве, работающем в чистом электрическом рабочем состоянии .
Розничная и оптовая торговля и реализация через глобальные компьютерные сети аппаратуры для передачи, приема, воспроизведения, записи и обработки изображений и звуков, источников питания, осциллографов, генераторов сигналов, мониторов, диагностической аппаратуры не для медицинских целей, частотомеров, электрических приборы учета, средства измерений, аппаратура спутниковой навигации, компьютеры, периферийное компьютерное оборудование, аппаратура обработки данных, записанные программы для ЭВМ, центральные процессоры (процессоры)
tmClass
Если EIU потребляет более 100 ГВтч и его затраты на электроэнергии составляют более 20 % валовой добавленной стоимости, надбавка EEG будет ограничена 0,05 центов/кВтч для всего потребления электроэнергии EIU.
EurLex-2
Библиотеки новых моделей для электрических самолетов
Cordis
Для целей 3A001.e.1.b. «вторичный элемент» — это «элемент», предназначенный для зарядки от внешнего электрического источника . источник.
ЕврЛекс-2
«(Неисполнение государством-членом обязательств – Шестая директива по НДС – Статья 12(3)(a) и (b) – Поставки газа и электроэнергии по сетям общего пользования – Постоянная плата за сети снабжения – Пониженная ставка )»
EurLex-2
Сегнетоэлектрический материал способен сохранять электрическую поляризацию в отсутствие приложенного электрического поля.
Eurlex2019
Вышеуказанная стеклянная посуда не электрически проводящая
tmClass
В обоснование своей заявки оно указало, что изделие было поставлено его клиентам для использования главным образом в условиях, когда электрические соединения должны быть защищены от воздействия электрического удара и/или сырости.
ЕврЛекс-2
3.1.2. Испытательное(ие) напряжение(я): напряжение(я) или диапазон(ы) напряжения на выводах светодиодных источников света, для которых предназначены электрические и фотометрические характеристики светодиодных источников света, и которые подлежат испытанию.
ЕврЛекс-2
— плавка сырья в электропечи ,
ЕврЛекс-2
Хотелось бы спросить Уполномоченного, когда мы, вероятно, увидим ситуацию, когда английская компания сможет продавать электроэнергию премьер-министру Франции.
Europarl8
Возобновляемые источники энергии постепенно заменяют традиционные виды топлива в четырех различных областях: электричество производство, горячая вода/отопление помещений, моторное топливо и сельские (автономные) энергетические услуги.
LASER-wikipedia2
Беспроводная зарядная система для маломощных потребителей электроэнергии энергии
патентов-ВОИС
Защита от электричества удара током
EurLex-2 8 октября 1883 года Гастон Тиссандье поднял в воздух первый дирижабль с электрическим двигателем .
LASER-wikipedia2
Услуги по установке, ремонту и техническому обслуживанию научной, морской, геодезической, фотографической, кинематографической, оптической, весовой, измерительной, сигнальной, контрольной (надзорной), спасательной и учебной аппаратуры и приборов, аппаратуры и приборов для дирижирования, коммутация, преобразование, накопление, регулирование или управление электричество , аппаратура для записи, передачи или воспроизведения звука или изображения, магнитные носители информации, записывающие диски, компакт-диски, DVD и другие цифровые носители записи, механизмы для монетоприемников, кассовые аппараты, счетные машины, оборудование для обработки данных, компьютеры, компьютерное программное обеспечение, устройства пожаротушения, компьютерное программное обеспечение и компьютерное оборудование, электрические и электронные регулирующие системы, компоненты и датчики
tmClass
Затем ионы переносятся магнитными или
0003 электрических поля к масс-анализатору.
WikiMatrix
Учитывая тот факт, что ЕСФ переходит к ежегодному закрытию рассрочки, можно принять, что для некоторых текущих расходов (например, газ, электричество, , телефон и т. д.) соответствующие счета-фактуры могут быть приняты во внимание для расчетов платежей после окончания календарного года, если они фактически выплачены конечным бенефициаром до последующего представления окончательного требования государством-членом (в течение шести месяцев).
EurLex-2
Электрические преобразователи , преобразователи частоты
tmClass
Ключом к безопасному использованию электрических ручных инструментов является: Всегда думайте заранее о том, что может произойти, до того, как это произойдет.
jw2019
Изоляционная арматура для электрических целей , из пластмассы
Eurlex2019
Рептилии на ложном пути? Выход за рамки традиционных оценок с динамическими моделями движения броуновского моста
1. Nathan R, Getz WM, Revilla E, Holyoak M, Kadmon R, Saltz D, et al. Парадигма экологии движения для объединения исследований движений организмов. Proc Natl Acad Sci. 2008;105(49): 19052–19059. doi: 10.1073/pnas.0800375105. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Nathan R, Getz WM, Revilla E, Holyoak M, Kadmon R, Saltz D, et al. Парадигма экологии движения для объединения исследований движений организмов. Proc Natl Acad Sci. 2008;105(49): 19052–19059. doi: 10.1073/pnas.0800375105. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
2. Gurarie E, Bracis C, Delgado M, Meckley TD, Kojola I, Wagner CM. Что делает животное? Инструменты для изучения поведенческой структуры в движениях животных. Дж Аним Экол. 2016;85(1):69–84. doi: 10.1111/1365-2656.12379. [PubMed] [CrossRef] [Google Scholar]
3. Берт У.Х. Понятия территориальности и домашнего ареала применительно к млекопитающим. J Млекопитающее. 1943; 24 (3): 346–352. дои: 10.2307/1374834. [Перекрестная ссылка] [Академия Google]
4. Пауэлл Р.А. Разнообразие взглядов на ареалы обитания млекопитающих или на ареал обитания — это больше, чем плотность местонахождения. J Млекопитающее. 2012;93(4):887–889. doi: 10.1644/12-MAMM-5-060.1. [CrossRef] [Google Scholar]
5. Kie JG, Matthiopoulos J, Fieberg J, Powell RA, Cagnacci F, Mitchell MS, et al. Концепция домашнего диапазона: актуальны ли традиционные методы оценки для современных технологий телеметрии? Philos Trans R Soc B: Biol Sci. 2010;365(1550):2221–2231. doi: 10.1098/rstb.2010.0093. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Kie JG, Matthiopoulos J, Fieberg J, Powell RA, Cagnacci F, Mitchell MS, et al. Концепция домашнего диапазона: актуальны ли традиционные методы оценки для современных технологий телеметрии? Philos Trans R Soc B: Biol Sci. 2010;365(1550):2221–2231. doi: 10.1098/rstb.2010.0093. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
6. Пауэлл Р.А., Митчелл М.С. Что такое домашний диапазон? J Млекопитающее. 2012;93(4):948–958. doi: 10.1644/11-MAMM-S-177.1. [CrossRef] [Google Scholar]
7. Riotte-Lambert L, Matthiopoulos J. Предсказуемость окружающей среды как причина и следствие движения животных. Тенденции Экол Эвол. 2020;35(2):163–174. doi: 10.1016/j.tree.2019.09.009. [PubMed] [CrossRef] [Google Scholar]
8. Фишер Д. Влияние структуры растительности, пищи и укрытия на домашний ареал и использование среды обитания находящегося под угрозой исчезновения валлаби. J Appl Ecol. 2000;37(4):660–671. doi: 10.1046/j.1365-2664.2000.00518.x. [Перекрестная ссылка] [Академия Google]
9. Диксон Б.Г., Бейер П. Ареал обитания и выбор среды обитания взрослыми пумами в южной Калифорнии. Дж. Уайлдл Манаг. 2002;66:1235–45.
Диксон Б.Г., Бейер П. Ареал обитания и выбор среды обитания взрослыми пумами в южной Калифорнии. Дж. Уайлдл Манаг. 2002;66:1235–45.
10. Тикканен Х., Рютконен С., Карлин О.П., Оллила Т., Паканен В.М., Туохимаа Х. и другие. Моделирование выбора среды обитания беркута и полетной активности в его домашних ареалах для более безопасного планирования ветряных электростанций. Оценка воздействия на окружающую среду, ред. 2018; 71:120–131. doi: 10.1016/j.eiar.2018.04.006. [CrossRef] [Google Scholar]
11. Marshall BM, Strine CT, Jones MD, Artchawakom T, Silva I, Suwanwaree P, et al. Пространство, подходящее для короля: пространственная экология королевских кобр (Ophiophagus hannah) в биосферном заповеднике Сакаерат, северо-восточный Таиланд. Амфибии-Рептилии. 2019;40(2):163–178. doi: 10.1163/15685381-18000008. [CrossRef] [Google Scholar]
12. Fleming CH, Fagan WF, Mueller T, Olson KA, Leimgruber P, Calabrese JM. Точная оценка домашнего диапазона с данными о движении: новая автокоррелированная оценка плотности ядра. Экология. 2015;96(5):1182–1188. дои: 10.1890/14-2010.1. [PubMed] [CrossRef] [Google Scholar]
Экология. 2015;96(5):1182–1188. дои: 10.1890/14-2010.1. [PubMed] [CrossRef] [Google Scholar]
13. Pfeifer M, Lefebvre V, Peres C, Banks-Leite C, Wearn O, Marsh C, et al. Создание лесных опушек оказывает глобальное влияние на лесных позвоночных. Природа. 2017;551(7679):187. doi: 10.1038/nature24457. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
14. Хейли А. Как далеко перемещаются животные? Обычные движения черепахи. Джан Джей Зул. 1989;67(1):208–215. дои: 10.1139/z89-028. [CrossRef] [Google Scholar]
15. Гуарино Ф. Пространственная экология крупной хищной ящерицы Varanus varius (Squamata: Varanidae) J Zool. 2002;258(4):449–457. doi: 10.1017/S0952836
1607. [CrossRef] [Google Scholar]
16. Bruton MJ, McAlpine CA, Smith AG, Franklin CE. Важность подземных укрытий для рептилий в засушливых ландшафтах: тематическое исследование женского питона. Австралийская экол. 2014;39(7): 819–829. doi: 10.1111/aec.12150. [CrossRef] [Google Scholar]
17. Мата-Сильва В., ДеСантис Д.Л., Ваглер А.Е., Джонсон Д.Д. Пространственная экология скальных гремучих змей (Crotalus lepidus) на далеком западе Техаса. Герпетология. 2018;74(3):245–254. doi: 10.1655/Herpetologica-D-16-00030.1. [CrossRef] [Google Scholar]
Мата-Сильва В., ДеСантис Д.Л., Ваглер А.Е., Джонсон Д.Д. Пространственная экология скальных гремучих змей (Crotalus lepidus) на далеком западе Техаса. Герпетология. 2018;74(3):245–254. doi: 10.1655/Herpetologica-D-16-00030.1. [CrossRef] [Google Scholar]
18. Row JR, Blouin-Demers G. Ядра не являются точными показателями размера домашнего ареала герпетофауны. Копейя. 2006; 2006(4):797–802. doi: 10.1643/0045-8511(2006)6[797:KANAEO]2.0.CO;2. [Перекрестная ссылка] [Академия Google]
19. Фиберг Дж. Ядро оценки плотности домашнего диапазона: сглаживание и автокорреляционный отвлекающий маневр. Экология. 2007;88(4):1059–1066. дои: 10.1890/06-0930. [PubMed] [CrossRef] [Google Scholar]
20. Kranstauber B, Kays R, LaPoint SD, Wikelski M, Safi K. Модель движения динамического броуновского моста для оценки распределения использования разнородных животных. Дж Аним Экол. 2012;81(4):738–746. doi: 10.1111/j.1365-2656.2012.01955.x. [PubMed] [CrossRef] [Академия Google]
21. Palm EC, Newman SH, Prosser DJ, Xiao X, Ze L, Batbayar N, et al. Картирование миграционных путей в Азии с использованием динамических моделей движения броуновского моста. Мов Экол. 2015;3(1):3. doi: 10.1186/s40462-015-0029-6. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Palm EC, Newman SH, Prosser DJ, Xiao X, Ze L, Batbayar N, et al. Картирование миграционных путей в Азии с использованием динамических моделей движения броуновского моста. Мов Экол. 2015;3(1):3. doi: 10.1186/s40462-015-0029-6. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
22. Бирн М.Е., Клинт Маккой Дж., Хинтон Дж.В., Чемберлен М.Дж., Коллиер Б.А. Использование динамического моделирования движения броуновского моста для измерения временных закономерностей выбора среды обитания. Дж Аним Экол. 2014;83(5):1234–1243. doi: 10.1111/1365-2656.12205. [PubMed] [CrossRef] [Академия Google]
23. Lai S, Bêty J, Berteaux D. Пространственно-временные горячие точки песцов, отслеженных со спутника, показывают большой диапазон обнаружения у хищника-млекопитающего. Мов Экол. 2015;3(1):1–10. doi: 10.1186/s40462-015-0065-2. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
24. Buechley ER, McGrady MJ, Çoban E, Şekercioğlu ÇH. Спутниковое слежение за многочисленными исчезающими видами стервятников для целей природоохранных мероприятий на Ближнем Востоке и в Восточной Африке. Биодайверс Консерв. 2018;27(9):2293–2310. doi: 10.1007/s10531-018-1538-6. [Перекрестная ссылка] [Академия Google]
Биодайверс Консерв. 2018;27(9):2293–2310. doi: 10.1007/s10531-018-1538-6. [Перекрестная ссылка] [Академия Google]
25. Schofield G, Bishop CM, MacLean G, Brown P, Baker M, Katselidis KA, et al. Новое GPS-слежение за морскими черепахами как инструмент управления природоохранной деятельностью. J Exp Mar Biol Ecol. 2007;347(1–2):58–68. doi: 10.1016/j.jembe.2007.03.009. [CrossRef] [Google Scholar]
26. Campbell HA, Dwyer RG, Irwin TR, Franklin CE. Использование домашнего ареала и перемещение эстуарных крокодилов на большие расстояния в период размножения и гнездования. ПЛОС Один. 2013;8(5):e62127. doi: 10.1371/journal.pone.0062127. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
27. Розенблатт А.Е., Хейтхаус М.Р., Маццотти Ф.Дж., Черкисс М., Джеффри Б.М. Внутрипопуляционные вариации в диапазонах активности, режимах питания, скорости движения и использовании среды обитания американских аллигаторов в субтропическом эстуарии. Шельф эстуарного побережья Sci. 2013; 135:182–190. doi: 10.1016/j.ecss.2013.10.008. [CrossRef] [Google Scholar]
2013; 135:182–190. doi: 10.1016/j.ecss.2013.10.008. [CrossRef] [Google Scholar]
28. Smith BJ, Hart KM, Mazzotti FJ, Basille M, Romagosa CM. Оценка технологии биологирования GPS для изучения пространственной экологии крупных змей. Аним Биотелем. 2018;6(1):1. doi: 10.1186/s40317-018-0145-3. [Перекрестная ссылка] [Академия Google]
29. Хебблуайт М., Хейдон Д.Т. Отличие технологии от биологии: критический обзор использования данных GPS-телеметрии в экологии. Philos Trans R So B: Biol Sci. 2010;365(1550):2303–2312. doi: 10.1098/rstb.2010.0087. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
30. Wolfe AK, Fleming PA, Bateman PW. Воздействие перемещения на большую ядовитую змею, адаптированную к городским условиям. Уайлдл Рез. 2018;45(4):316–324. дои: 10.1071/WR17166. [CrossRef] [Google Scholar]
31. Silva I, Crane M, Suwanwaree P, Strine C, Goode M. Использование динамических моделей движения броуновского моста для определения размера домашнего ареала и моделей движения королевских кобр. ПЛОС Один. 2018;13(9):e0203449. doi: 10.1371/journal.pone.0203449. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
ПЛОС Один. 2018;13(9):e0203449. doi: 10.1371/journal.pone.0203449. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
32. Walter WD, Onorato DP, Fischer JW. Существует ли единственный лучший оценщик? Выбор оценщиков домашнего диапазона с использованием площади под кривой. Мов Экол. 2015;3(1):10. doi: 10.1186/s40462-015-0039-4. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
33. Катаджисто Дж., Мойланен А. Метод домашнего диапазона на основе ядра для данных с нерегулярными интервалами выборки. Экол Модель. 2006;194(4):405–413. doi: 10.1016/j.ecolmodel.2005.11.001. [Перекрестная ссылка] [Академия Google]
34. Knight CM, Kenward RE, Gozlan RE, Hodder KH, Walls SS, Lucas MC. Оценка домашнего диапазона в сложных ограниченных средах: важность выбора метода для обнаружения сезонных изменений. Уайлдл Рез. 2009;36(3):213–224. дои: 10.1071/WR08032. [CrossRef] [Google Scholar]
35. Cohen BS, Prebyl TJ, Collier BA, Chamberlain MJ. Метод оценки домашнего ареала и график отбора проб GPS влияют на выводы о выборе среды обитания для диких индеек. Дикий Сок Бык. 2018;42(1):150–159. doi: 10.1002/wsb.845. [Перекрестная ссылка] [Академия Google]
Дикий Сок Бык. 2018;42(1):150–159. doi: 10.1002/wsb.845. [Перекрестная ссылка] [Академия Google]
36. Gibbons JW, Scott DE, Ryan TJ, Buhlmann KA, Tuberville TD, Metts BS, et al. Глобальное сокращение рептилий, Дежавю амфибий: виды рептилий сокращаются в глобальном масштабе. Шесть серьезных угроз для популяций рептилий — это утрата и деградация среды обитания, внедрение инвазивных видов, загрязнение окружающей среды, болезни, неустойчивое использование и глобальное изменение климата. Бионаука. 2000;50(8):653–666. doi: 10.1641/0006-3568(2000)050[0653:TGDORD]2.0.CO;2. [CrossRef] [Академия Google]
37. Roll U, Feldman A, Novosolov M, Allison A, Bauer AM, Bernard R, et al. Глобальное распространение четвероногих свидетельствует о необходимости целенаправленного сохранения рептилий. Нат Экол Эвол. 2017;1(11):1677–1682. doi: 10.1038/s41559-017-0332-2. [PubMed] [CrossRef] [Google Scholar]
38. McClintock BT, Michelot T. momentuHMM: пакет R для обобщенных скрытых марковских моделей движения животных. Методы Экол Эвол. 2018;9(6):1518–1530. doi: 10.1111/2041-210X.12995. [CrossRef] [Академия Google]
Методы Экол Эвол. 2018;9(6):1518–1530. doi: 10.1111/2041-210X.12995. [CrossRef] [Академия Google]
39. Langrock R, Hopcraft JGC, Blackwell PG, Goodall V, King R, Niu M, et al. Моделирование группового динамического движения животных. Методы Экол Эвол. 2014;5(2):190–199. doi: 10.1111/2041-210X.12155. [CrossRef] [Google Scholar]
40. Stuginski DR, Navas CA, de Barros FC, Camacho A, Bicudo JEPW, Grego KF, et al. Филогенетический анализ стандартной скорости метаболизма змей: новое предложение для понимания межвидовой изменчивости пищевого поведения. J Comp Physiol B. 2018;188(2):315–323. doi: 10.1007/s00360-017-1128-z. [PubMed] [CrossRef] [Академия Google]
41. Purwandana D, Ariefiandy A, Imansyah MJ, Seno A, Ciofi C, Letnic M, et al. Экологические аллометрии и динамика использования ниш в онтогенезе комодских варанов. Нац. наук. 2016;103(3–4):27. doi: 10.1007/s00114-016-1351-6. [PubMed] [CrossRef] [Google Scholar]
42. Уоллес К.М., Лесли А.Дж. Рацион нильского крокодила (Crocodylus niloticus) в дельте Окаванго, Ботсвана. Дж Герпетол. 2008;42(2):361–368. дои: 10.1670/07-1071.1. [CrossRef] [Google Scholar]
Дж Герпетол. 2008;42(2):361–368. дои: 10.1670/07-1071.1. [CrossRef] [Google Scholar]
43. Шайн Р. Экология австралийской гадюки Acanthophis antarcticus (Elapidae): свидетельство конвергенции с Viperidae. Герпетология. 1980;36(4):281–9.
44. Glaudas X, Glennon KL, Martins M, Luiselli L, Fearn S, Trembath DF, et al. Способ кормодобывания, относительный размер добычи и широта рациона: филогенетически подробный анализ экологии питания змей. Дж Аним Экол. 2019;88(5):757–767. doi: 10.1111/1365-2656.12972. [PubMed] [CrossRef] [Google Scholar]
45. Reinert HK, Cundall D, Bushar LM. Поиск пищи лесной гремучей змеи, Crotalus horridus . Копейя. 1984; 4: 976–81.
46. Уэбб Дж. К., Шайн Р. Полевое исследование пространственной экологии и перемещений исчезающих видов змей, Hoplocephalus bungaroides . Биол Консерв. 1997;82(2):203–217. doi: 10.1016/S0006-3207(97)00032-3. [CrossRef] [Google Scholar]
47. Хьюи Р.Б., Пианка Э.Р. Экологические последствия кормового режима. Экология. 1981;62(4):991–999. дои: 10.2307/1936998. [CrossRef] [Google Scholar]
Экология. 1981;62(4):991–999. дои: 10.2307/1936998. [CrossRef] [Google Scholar]
48. Мушинский Х.Р., Хебрард Дж.Дж., Водопич Д.С. Онтогенез кормовой экологии водяной змеи. Экология. 1982; 63 (6): 1624–1629. дои: 10.2307/1940102. [CrossRef] [Google Scholar]
49. Макартни Дж.М., Грегори П.Т., Ларсен К.В. Табличный обзор данных о перемещениях и ареалах обитания змей. Дж Герпетол. 1988;22(1):61–73.
50. Sciaini M, Fritsch M, Scherer C, Simpkins CE. NLMR и landscapetools: интегрированная среда для моделирования и модификации моделей нейтрального ландшафта в R. Methods Ecol Evol. 2018;9(11):2240–2248. doi: 10.1111/2041-210X.13076. [CrossRef] [Google Scholar]
51. Де Солла С.Р., Бондурянский Р., Брукс Р.Дж. Устранение автокорреляции снижает биологическую значимость оценок домашнего диапазона. Дж Аним Экол. 1999;68(2):221–234. doi: 10.1046/j.1365-2656.1999.00279.x. [Перекрестная ссылка] [Академия Google]
52. Суихарт Р.К., Слэйд Н.А. Влияние интервала выборки на оценки размера домашнего ареала. Дж. Уайлдл Манаг. 1985; 49(4):1019–25.
Дж. Уайлдл Манаг. 1985; 49(4):1019–25.
53. Вортон Б.Дж. Методы ядра для оценки распределения использования в домашних исследованиях. Экология. 1989;70(1):164–168. дои: 10.2307/1938423. [CrossRef] [Google Scholar]
54. Initiative C, Fleming CH, Calabrese JM. ctmm-package: Моделирование движения в непрерывном режиме. 2020. [Google Scholar]
55. Аллен М., Поджиали Д., Уитакер К., Маршалл Т.Р., Киевит Р.А. Графики дождевых облаков: многоплатформенный инструмент для надежной визуализации данных. Добро пожаловать в открытое разрешение. 2019;4(63):1–41. [Бесплатная статья PMC] [PubMed]
56. Дженнрих Р., Тернер Ф. Измерение некруглой домашней дальности. Дж Теор Биол. 1969;22(2):227–37. [PubMed]
57. Андерсон DJ. Домашний диапазон: новый метод непараметрической оценки: экологический архив e063-001. Экология. 1982;63(1):103–112. дои: 10.2307/1937036. [CrossRef] [Google Scholar]
58. Robertson PA, Aebischer NJ, KENWARDS RE, Hanski IK, Williams NP. Моделирование и точная оценка индексов домашнего диапазона на основе базовых траекторий. J Appl Ecol. 1998;35(6):928–940. doi: 10.1111/j.1365-2664.1998.tb00010.x. [CrossRef] [Google Scholar]
J Appl Ecol. 1998;35(6):928–940. doi: 10.1111/j.1365-2664.1998.tb00010.x. [CrossRef] [Google Scholar]
59. Börger L, Franconi N, De Michele G, Gantz A, Meschi F, Manica A, et al. Влияние режима выборки на среднее значение и дисперсию оценок размера домашнего ареала. Дж Аним Экол. 2006;75(6):1393–405. [PubMed]
60. Laver PN, Kelly MJ. Критический обзор исследований домашнего диапазона. Дж. Уайлдл Манаг. 2008;72(1):290–298. дои: 10.2193/2005-589. [CrossRef] [Google Scholar]
61. Petersen CE, Goetz SM, Dreslik MJ, Kleopfer JD, Savitzky AH. Пол, масса и усилия по мониторингу: ключи к пониманию пространственной экологии лесных гремучих змей (Crotalus horridus) Herpetologica. 2019;75(2):162–174. doi: 10.1655/D-18-00035. [CrossRef] [Google Scholar]
62. Seaman DE, Powell RA. Оценка точности ядерных оценок плотности для анализа домашнего диапазона. Экология. 1996;77(7):2075–2085. дои: 10.2307/2265701. [CrossRef] [Google Scholar]
63. Хемсон Г., Джонсон П. , Саут А., Кенворд Р., Рипли Р., Макдональд Д. Являются ли ядра горчицей? Данные ошейников глобальной системы позиционирования (GPS) указывают на проблемы для анализа исходного диапазона ядра с перекрестной проверкой методом наименьших квадратов. Дж Аним Экол. 2005;74(3):455–63.
, Саут А., Кенворд Р., Рипли Р., Макдональд Д. Являются ли ядра горчицей? Данные ошейников глобальной системы позиционирования (GPS) указывают на проблемы для анализа исходного диапазона ядра с перекрестной проверкой методом наименьших квадратов. Дж Аним Экол. 2005;74(3):455–63.
64. Noonan MJ, Tucker MA, Fleming CH, Akre TS, Alberts SC, Ali AH, et al. Всесторонний анализ автокорреляции и систематической ошибки в оценке домашнего диапазона. Эколь моногр. 2019;89(2):e01344. doi: 10.1002/ecm.1344. [CrossRef] [Google Scholar]
65. Sofaer HR, Hoeting JA, Jarnevich CS. Площадь под кривой точности-отзыва как показатель производительности для редких бинарных событий. Методы Экол Эвол. 2019;10(4):565–577. дои: 10.1111/2041-210X.13140. [CrossRef] [Google Scholar]
66. Bürkner P-C. Расширенное байесовское многоуровневое моделирование с пакетом R brms. 2017. [Google Академия]
67. Лемуан Н.П. Выход за рамки неинформативных априорных данных: почему и как выбирать слабоинформативные априорные данные в байесовском анализе. Ойкос. 2019;128(7):912–928. doi: 10.1111/oik.05985. [CrossRef] [Google Scholar]
Ойкос. 2019;128(7):912–928. doi: 10.1111/oik.05985. [CrossRef] [Google Scholar]
68. R Core Team. R: язык и среда для статистических вычислений. Вена: R Foundation for Statistical Computing; 2019. http://www.R-project.org/. По состоянию на 17 октября 2020 г.
69. Команда RStudio. RStudio: интегрированная разработка для Р. Бостон: RStudio. Инк; 2015. [Google Академия]
70. Родитель С, Уэзерхед П.Дж. Реакция поведения и жизненного цикла восточных гремучих змей массасауга (Sistrurus catenatus catenatus) на вмешательство человека. Экология. 2000;125(2):170–178. doi: 10.1007/s004420000442. [PubMed] [CrossRef] [Google Scholar]
71. Reed RN, Douglas ME. Экология гремучей змеи большого каньона (Crotalus viridis abyssus) в маленьком каньоне реки Колорадо, Аризона. Юго-Западный Нац. 2002;47(1):30–9.
72. Васко Д.К., Саса М. Модели активности неотропического хищника из засады: пространственная экология Fer-de-lance (Bothrops asper, Serpentes: Viperidae) в Коста-Рике. Биотропика. 2009 г.;41(2):241–249. doi: 10.1111/j.1744-7429.2008.00464.x. [CrossRef] [Google Scholar]
Биотропика. 2009 г.;41(2):241–249. doi: 10.1111/j.1744-7429.2008.00464.x. [CrossRef] [Google Scholar]
73. Hart KM, Cherkiss MS, Smith BJ, Mazzotti FJ, Fujisaki I, Snow RW, et al. Домашний ареал, использование среды обитания и модели передвижения неместных бирманских питонов в Национальном парке Эверглейдс, Флорида, США. Аним Биотелем. 2015;3(1):8. doi: 10.1186/s40317-015-0022-2. [CrossRef] [Google Scholar]
74. Marshall BM, Crane M, Silva I, Strine CT, Jones MD, Hodges CW, et al. Нет места для передвижения: королевские кобры сокращают количество перемещений в сельском хозяйстве. Мов Экол. 2020;8(1):33. doi: 10.1186/s40462-020-00219-5. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
75. Calabrese JM, Fleming CH, Gurarie E. ctmm: пакет r для анализа данных о перемещении животных как непрерывного стохастического процесса. Методы Экол Эвол. 2016;7(9):1124–1132. doi: 10.1111/2041-210X.12559. [CrossRef] [Google Scholar]
76. Симан Д.Е., Миллспо Дж. Дж., Кернохан Б.Дж., Брандидж Г.К., Редеке К.Дж., Гитцен Р.А. Влияние размера выборки на оценки домашнего диапазона ядра. Дж. Уайлдл Манаг. 1999;63(2):739–47.
Дж., Кернохан Б.Дж., Брандидж Г.К., Редеке К.Дж., Гитцен Р.А. Влияние размера выборки на оценки домашнего диапазона ядра. Дж. Уайлдл Манаг. 1999;63(2):739–47.
77. Girard I, Ouellet J-P, Courtois R, Dussault C, Breton L. Влияние усилий по отбору проб, основанных на телеметрии GPS, на оценки размера домашнего ареала. Дж. Уайлдл Манаг. 2002;66(4):1290–300.
78. Нильсен Э.Б., Педерсен С., Линнелл Д.Д. Можно ли использовать минимальные выпуклые многоугольники для получения биологически значимых выводов? Экол рез. 2008;23(3):635–639. doi: 10.1007/s11284-007-0421-9. [CrossRef] [Google Scholar]
79. Recio MR, Mathieu R, Maloney R, Seddon PJ. Сравнение стоимости телеметрии на основе GPS и VHF: тематическое исследование диких кошек Felis catus в Новой Зеландии. N Z J Экол. 2011;35(1):114–7.
80. Прайс-Риз С.Дж., Браун Г.П., Шайн Р. Выбор среды обитания ящерицами синего языка (Tiliqua, Scincidae) в тропической Австралии: исследование с использованием GPS-телеметрии. Аним Биотелем. 2013;1(1):7. дои: 10.1186/2050-3385-1-7. [Перекрестная ссылка] [Академия Google]
Аним Биотелем. 2013;1(1):7. дои: 10.1186/2050-3385-1-7. [Перекрестная ссылка] [Академия Google]
81. Вортон Б.Дж. Использование симуляции Монте-Карло для оценки оценок домашнего диапазона на основе ядра. Дж. Уайлдл Манаг. 1995;59(4):794–800.
82. Джонс М.С., Маррон Дж.С., Шизер С.Дж. Краткий обзор выбора полосы пропускания для оценки плотности. J Am Stat Assoc. 1996; 91(433):401–407. doi: 10.1080/01621459.1996.10476701. [CrossRef] [Google Scholar]
83. Ван Муртер Б., Роландсен С.М., Базиль М., Гайярд Дж.М. Движение является связующим звеном между домашними участками и выбором среды обитания. Дж Аним Экол. 2016;85(1):21–31. дои: 10.1111/1365-2656.12394. [PubMed] [CrossRef] [Google Scholar]
84. Кранштаубер Б. Моделирование движения животных в виде броуновских мостов с ковариатами. Мов Экол. 2019;7(1):22. doi: 10.1186/s40462-019-0167-3. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
85. Michelot T, Blackwell PG. Коррелированные случайные блуждания с переключением состояний в непрерывном времени. Методы Экол Эвол. 2019;10(5):637–649. doi: 10.1111/2041-210X.13154. [CrossRef] [Google Scholar]
Методы Экол Эвол. 2019;10(5):637–649. doi: 10.1111/2041-210X.13154. [CrossRef] [Google Scholar]
86. Mitchell LJ, White PC, Arnold KE. Компромисс между частотой фиксации и продолжительностью отслеживания при оценке размера домашнего ареала и выбора среды обитания для мелких позвоночных. ПЛОС Один. 2019;14(7):e0219357. doi: 10.1371/journal.pone.0219357. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
87. Fieberg J, Börger L. Не могли бы вы сформулировать «домашний участок» как вопрос? J Млекопитающее. 2012;93(4):890–902. doi: 10.1644/11-MAMM-S-172.1. [CrossRef] [Google Scholar]
88. Schlägel UE, Lewis MA. Надежность моделей движения: могут ли модели преодолеть разрыв между временными масштабами наборов данных и поведенческими процессами? Дж. Матем. Биол. 2016;73(6–7):1691–1726. doi: 10.1007/s00285-016-1005-5. [PubMed] [CrossRef] [Академия Google]
89. Bastille-Rousseau G, Murray DL, Schaefer JA, Lewis MA, Mahoney SP, Potts JR. Пространственные масштабы решений о выборе среды обитания: последствия для моделирования движения на основе телеметрии.
