

Содержание
Справочник по электрическим машинам: В 2 т./ 74 Под общ. ред. И. П. Копылова и Б. К. Клокова. :: Библиотека технической литературы
Приведены технические данные, описаны особенности конструкций и области применения электрических машин, выпускаемых предприятиями электротехнической промышленности СССР. Дана классификация электрических машин, описаны системы охлаждения типы и особенности конструкций обмоток, приведены методы испытании электрических машин. Том первый содержит технические данные машин общего назначения и крупных машин различных типов.
Приведены технические данные и описаны конструкции электрических машин специального назначения. Даны основные сведения о машинах малой мощности для систем автоматики и их классификация.
Для инженеров и техников, занятых эксплуатацией электрических машин и проектированием электрического оборудования различных предприятий, промышленных объектов и установок.
ВВЕДЕНИЕ
Электрические машины применяются во всех отраслях промышленности, на транспорте, в сельском хозяйстве и быту. Почти вся электрическая энергия вырабатывается электрическими генераторами, а две трети ее преобразуется электрическими двигателями в механическую энергию. От правильного выбора и использования электрических машин во многом зависит технический уровень изделий многих отраслей промышленности.
Почти вся электрическая энергия вырабатывается электрическими генераторами, а две трети ее преобразуется электрическими двигателями в механическую энергию. От правильного выбора и использования электрических машин во многом зависит технический уровень изделий многих отраслей промышленности.
Номенклатура выпускаемых в СССР электрических машин огромна. В данном Справочнике содержатся сведения почти о 100000 типоразмеров электрических машин.
Первый том Справочника содержит общие сведения, относящиеся ко всем электрическим машинам, в том числе вопросы стандартизации в электромашиностроении, промышленных испытаний, технического обслуживания и ремонта электрических машин (часть первая), а также технические данные электрических машин общего назначения (синхронных, асинхронных и машин постоянного тока) и крупных электрических машин: турбогенераторов, гидрогенераторов, синхронных компенсаторов, асинхронных двигателей и двигателей постоянного тока большой мощности (часть вторая).
Во втором томе Справочника приводятся технические данные исполнительных и информационных электрических машин малой мощности, применяемых в системах автоматики (часть третья), и электрических машин специального назначения: крановых, металлургических, судовых, тяговых, а также машин, применяемых в гибких производственных системах и робототехнологических комплексах, в автотракторном электрооборудовании, для привода электрифицированного инструмента, в бытовой технике и т. п. (часть четвертая).
п. (часть четвертая).
Справочник предназначен для специалистов, занимающихся применением и эксплуатацией электрических машин, поэтому в нем приводятся лишь основные сведения, необходимые для проектирования и эксплуатации электромеханических систем. Материал Справочника рассчитан в основном на инженеров-электромехаников, энергетиков и электриков, а также аспирантов и студентов высших и средних специальных учебных заведений.
Справочник по электрическим машинам, выпускаемым в СССР, издается впервые. До сих пор сведения по отдельным типам электрических машин приводились в отдельных монографиях и справочниках. В данном Справочнике сделана попытка собрать в одном издании сведения по всем электрическим машинам. Конечно, номенклатура электрических машин так велика, что при всем старании авторов не все электрические машины попали на его страницы. Но авторы уверены, что большинство читателей найдут в нем ответы на интересующие их вопросы.
Капитальный труд по составлению Справочника выполнен большим коллективом авторов – ведущих специалистов электротехнической промышленности и высшей школы. В каждом томе приведен список авторов с указанием разделов, написанных каждым автором. Координация и сбор материалов, его систематизация и редактирование проведены доктором техн. наук И. П. Копыловым и канд. техн. наук Б, К, Клоковым.
В каждом томе приведен список авторов с указанием разделов, написанных каждым автором. Координация и сбор материалов, его систематизация и редактирование проведены доктором техн. наук И. П. Копыловым и канд. техн. наук Б, К, Клоковым.
Авторы считают своим приятным долгом выразить благодарность рецензенту доктору техн. наук Е. Г. Орлову за денные замечания и рекомендации, сделанные при просмотре рукописи.
Редакторы Справочника признательны сотрудникам Московского энергетического института Г. А. Лебедевой, Н. С Сергейче-вой, Т. А. Киселевой, Л, Л. Игнатьевой за большую помощь в подготовке рукописи к изданию.
Редакторы и авторы Справочника с благодарностью примут все замечания и пожелания по улучшению структуры Справочника» дополнению или изменению номенклатуры рассмотренных электрических машин, которые следует направлять в адрес Энерго-атомиздата: 113114, Москва, М-114, Шлюзовая наб., 10.
Я. Я. Копылов Б. К, Клоков
Предисловие 3
Том 1
ЧАСТЬ ПЕРВАЯ. ОБЩИЕ СВЕДЕНИЯ
ОБЩИЕ СВЕДЕНИЯ
Раздел 1. Общие понятия и определения 5
1.1. Основные типы и классификация электрических машин 5
1.2. Преобразование энергии в электрических машинах 9
1.3. Математические модели электрических машин 11
1.4. Параметры электрических машин 14
1.5. Термины и определения 16
1.6. Надежность, электрических машин 18
1.6.1. Основные понятия 18
1.6.2 Показатели надежности 19
1.6.3. Причины отказов 21
1.6.4. Аттестация качества электрических машин 23
1.7. Вибрация и шумы электрических машин 24
1.7.1. Источники вибрации и шума электрических машин 24
1.7.2. Показатели вибрации электрических машин 26
1.7.3. Измерения шума и вибрации 27
Раздел 2. Стандартизация в электромашиностроении 29
2.1. Общие сведения и задачи стандартизации 29
2.2. Параметры электрической энергии 33
2.3. Внешние воздействующие факторы 35
2.4. Номинальные данные и установочно-присоединительные размеры электрических машин 37
2. 5. Конструктивное исполнение электрических машин по способу монтажа 38
5. Конструктивное исполнение электрических машин по способу монтажа 38
2.6. Исполнения электрических машин по степени защиты от воздействия окружающей среды 43
Раздел 3. Нагрев и охлаждение электрических машин 45
3.1. Распределение потерь по объему и нагрев электрических машин 45
3.2. Допустимая температура частей электрических машин 46
3.3. Режимы работы электрических машин 51
3.4. Охлаждение электрических машин 56
Раздел 4. Обмотки электрических машин 64
4.1. Типы обмоток электрических машин 64
4.2. Конструктивное исполнение обмоток машин переменного тока 64
4.3. Обмоточный коэффициент 67
4.4. Обозначение выводов обмоток машин переменного тока 69
4.5. Схемы трехфазных распределенных обмоток 73
4.5.1. Однослойные обмотки 73
4.5.2. Двухслойные петлевые обмотки 75
4.53. Обмотки с дробным числом пазов на полюс и фазу 77
4.5.4. Стержневые волновые обмотки машин переменного тока 78
4.5.5. Обмотки для механизированной укладки 79
4. 5.6. Обмотки многоскоростных асинхронных двигателей 79
5.6. Обмотки многоскоростных асинхронных двигателей 79
4.6. Особенности схем обмоток двухфазных и однофазных двигателей 81
4.7. Обмотки якорей машин постоянного тока 85
4.7.1. Особенности конструктивного выполнения обмоток якоря 85
4.7.2. Петлевые обмотки якоря 86
4.7.3. Волновые обмотки якоря 88
4.8. Компенсационные обмотки машин постоянного тока 91
4.9. Обозначение выводов обмоток машин постоянного тока 91
4.10. Обмотки возбуждения 93
4.10.1. Обмотки возбуждения синхронных машин 93
4.10.2. Обмотки возбуждения машин постоянного тока 95
Раздел 5.1 Промышленные испытания электрических машин 96
5.1. Виды промышленных испытаний 96
5.2. Программы приемочных и приемо-сдаточных испытаний 98
5.3. Нормы и методы испытаний новых машин 100
5.3.1. Измерение сопротивления изоляции 100
5.3.2. Измерение сопротивления обмоток при постоянном токе 101
5.3.3. Испытание изоляции на электрическую прочность 101
5.3.4.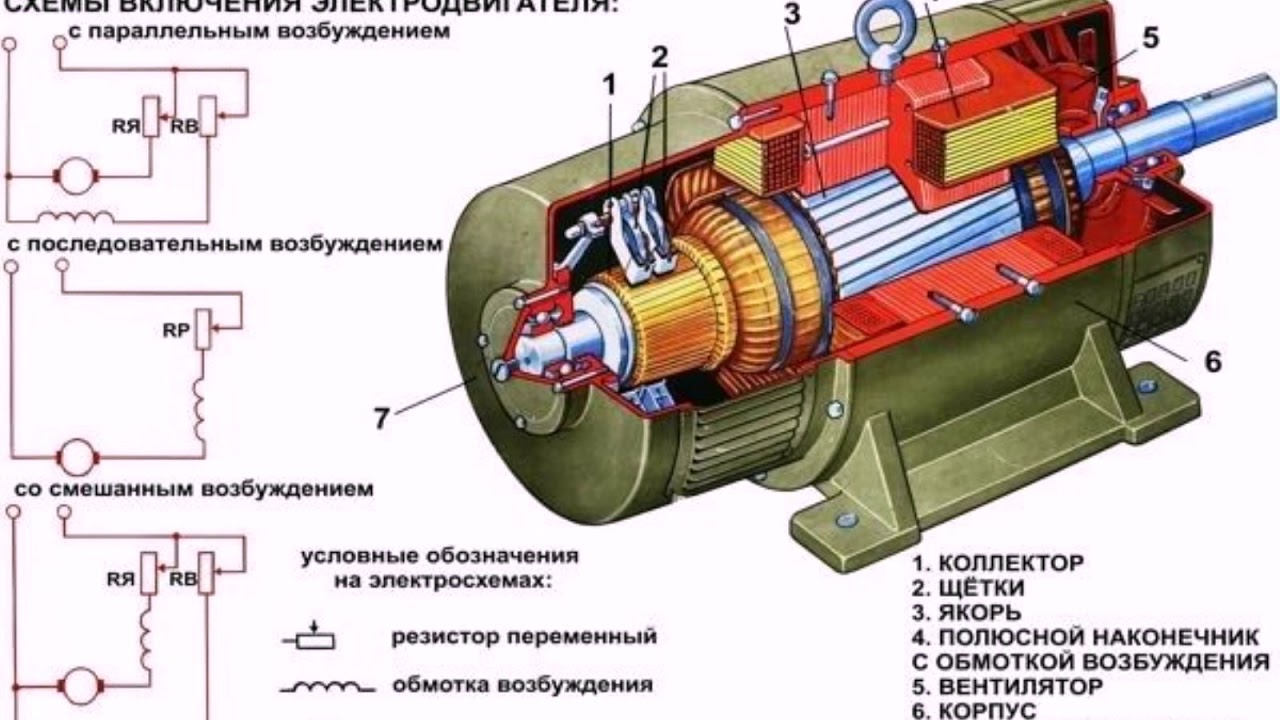 Испытание междувитковой изоляции обмоток 103
Испытание междувитковой изоляции обмоток 103
5.3.5. Испытание на кратковременную перегрузку по току 104
5.3.6. Испытания при повышенной частоте вращения 104
5.3.7. Испытание на нагревание 104
5.3.8. Определение коэффициента полезного действия 106
5.3.9. Измерение вибрации и уровня шума 107
5.3.10. Характеристики и параметры электрических машин 108
5.4. Испытания на надежность 108
5.4.1. Задачи и методы испытаний 108
5.4.2. Контрольные испытания 109
5.4.3. Определительные испытания 110
5.4.4. Диагностика и прогнозирование технического состояния электрических машин 111
5.4.5. Выбор показателей работоспособности 112
Раздел 6. Эксплуатация электрических машин 113
6.1. Общие положения 113
6.1 1. Основные задачи эксплуатации 113
6.1.2. Основные понятия, характеризующие эксплуатацию электрических машин 113
6.2. Хранение электрических машин 114
6.2.1. Условия хранения электрических машин 114
6.2.2. Классификация помещений с электроустановками и размещение электрооборудования 116
6. 3. Выбор электродвигателей 117
3. Выбор электродвигателей 117
6.3.1. Выбор электродвигателей по роду тока, конструктивному исполнению, классу вибрации и уровню шума 117
6.3.2. Выбор электродвигателей по мощности 120
6.3.3. Выбор электродвигателей для различных режимов работы 121
6.4. Основные причины отказов электрических машин 127
6.4.1. Виды неисправностей и причины их появления 127
6.4.2. Выбор защиты электродвигателей 128
Раздел 7. Организация и нормы ремонта электрических машин 129
7.1. Общие вопросы ремонта электрических машин 129
7.2. Объем работ по техническому обслуживанию и ремонту 131
7.3. Испытание электрических машин при ремонте 132
7.4. Организация электроремонтного производства 136
7.5. Технические условия и организация ремонта 137
7.5.1. Технические условия ремонта 137
7.5.2. Структура электроремонтного предприятия 138
ЧАСТЬ ВТОРАЯ. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ОБЩЕГО НАЗНАЧЕНИЯ
Раздел 8. Синхронные машины 140
8.1. Общие сведения 140
8. 2- Турбогенераторы 140
2- Турбогенераторы 140
8.2.1. Общая характеристика 140
8.2-2. Турбогенераторы с воздушным охлаждением серии Т 141
8.2.3. Турбогенераторы с водородным охлаждением серии ТВФ 142
8.2.4. Турбогенераторы с водородно-водяным охлаждением серии ТВВ 143
8.2.5. Турбогенераторы с полным водяным охлаждением серии ТЗВ 148
8.2.6. Турбогенераторы серии ТГВ и ТВМ 149
8.2.7. Системы возбуждения, регулирования и защиты 151
8.2.8. Режимы работы турбогенераторов 152
S.2.9. Ударные турбогенераторы 153
8.3. Гидрогенераторы 154
83.1. Классификация гидрогенераторов 154
8.3.2. Конструкция и технические данные вертикальных гидрогенераторов нормального исполнения 154
8.3.3. Гидрогенератор для Саяно-Шушенской ГЭС 163
8.3.4. Гидрогенератор для ГЭС Сальто-Гранде .164
8.3.5. Гидрогенератор для Верхне-Териберской ГЭС 165
8.3.6. Гидрогенератор для ГЭС Пурнари 165
8.3.7. Генераторы-двигатели для ГАЭС 166
8.3.8. Особенности конструкции и технические данные капсульных гидрогенераторов 16S
8. 3.9. Капсульный гидрогенератор для ГЭС Джердап 11 – Железные ворота II 169
3.9. Капсульный гидрогенератор для ГЭС Джердап 11 – Железные ворота II 169
8.3.10. Капсульный гидрогенератор для Даугавпилсской ГЭС 170
8.3.11. Системы возбуждения гидрогенераторов 171
8.3.12. Режимы работы гидрогенераторов 172
8.4. Синхронные явнополюсные генераторы для автономных энергетических систем 175
8.4.1. Особенности генераторов автономных систем 175
8.4.2. Синхронный генератор типа СГ 2-85/45-12 175
8.4.3. Синхронный генератор типа СГД 103-8 .176
8.4.4. Синхронные генераторы типа СГД 625-1500 и СГД 625- 1500М 176
8.4.5. Синхронные генераторы серии СГД2 и СГД2М 17-го габарита 176
8.4.6. Синхронный генератор типа БГСП 17-61-8 177
8.4.7. Синхронные генераторы серий ОС и ЕСС 178
8.4.8. Синхронные генераторы типа ГСФ 180
8.4.9. Синхронные генераторы типа ГАБ 181
8.5. Синхронные компенсаторы 182
8.5.1. Назначение синхронных компенсаторов 182
8.5.2. Синхронные компенсаторы с воздушным охлаждением 182
8. 5.3. Синхронные компенсаторы с водородным охлаждением 183
5.3. Синхронные компенсаторы с водородным охлаждением 183
8.5.4. Бесщеточная система возбуждения компенсаторов 186
8.5.5. Система водородного охлаждения компенсаторов 187
8.5.6. Пуск компенсаторов 187
8.5.7. Режимы работы компенсаторов .187
8.6. Синхронные двигатели 187
8.6.1. Классификация синхронных двигателей 187
8.6.2. Синхронные явнополюсные двигатели общего назначения серий СДН и СДНЗ 188
8.6.3. Синхронные явнополюсные компрессорные двигатели серий СДК, СДКП, СДКМ .192
8.6.4. Синхронные явнополюсные двигатели серий СДКП2 18—21-го габаритов .196
8.6.5. Синхронные явнополюсные двигатели серии СДМЗ для привода мельниц ., 196
8.6.6. Синхронные явнополюсные двигатели серии СДМП2 19-го габарита 197
8.6.7. Синхронные явнополюсные двигатели серии ДСП 198
8.6.8. Синхронные явнополюсные днигатели серии ДСЗ для привода преобразовательных агрегатов 199
8.6.9. Синхронные явнополюсные вертикальные двигатели серии ВДС для привода насосов 200
8. 6.10. Система возбуждения янвнополюсных синхронных двигателей 204
6.10. Система возбуждения янвнополюсных синхронных двигателей 204
8.6.11. Синхронные неявнополюсные двигатели серий СТД и ТДС 204
8.6.12. Синхронные неявнополюсные двигатели серии СТДП 205
8.6.13. Пуск синхронных неявнополюсных двигателей 207
8.6.14. Системы возбуждения неявнополюсных синхронных двигателей 208
8.7. Особенности испытаний синхронных машин 209
8.7.1. Испытания на стенде завода-изготовителя 209
8 7.2. Испытания на месте установки 212
8.8. Перспективы развития синхронных машин 214
8.8.1. Основные направления развития синхронных машин 214
8.8.2. Перспективы развития гидрогенераторостроения .215
8.8.3. Перспективы развития турбогенераторостроения 215
Раздел 9. Асинхронные машины 216
9.1. Общие сведения 216
9.1.1. Асинхронные машины как преобразователи энергии 216
9.1.2. Конструкция и основные эксплуатационные характеристики 216
9.1.3. Особенности асинхронных двигателей с фазными и короткозамкнутыми роторами 218
9. 1.4. Регулирование частоты вращения асинхронных двигателей 221
1.4. Регулирование частоты вращения асинхронных двигателей 221
9.1.5. Специальные режимы асинхронных машин 222
9.2. Асинхронные двигатели серии 4А 223
9.2.1. Структура и характеристика серий 223
9.2.2. Назначение и условия эксплуатации двигателей основного исполнения 223
9.2.3. Особенности конструкции двигателей серии 4А 226
9.2.4 Асинхронные двигатели серии 4А основного исполнения 228
9.2.5. Двигатели серии 4А с повышенным пусковым моментом (4АР) 245
9.2.6. Двигатели серии 4А с повышенным скольжением 4AС 246
9.2.7. Многоскоростные двигатели серии 4А 249
9.2.8. Двигатели серии 4А на частоту 60 Гц 254
9.2-9. Двигатели серии 4А с фазным ротором (4АК, 4АНК) 255
9.2.10. Двигатели серии 4А малошумные (4А…Н) 257
9.2.11. Двигатели серии 4А со встроенным электромагнитным тормозом (4А…Е) 257
9.2.12. Двигатели серии 4 А встраиваемые (4АВ) 257
9.2.13. Двигатели серии 4А с встроенной температурной защитой (4А…Б) 258
9. 2.14. Двигатели серии 4А для моноблочных насосов (4А…Ж) 258
2.14. Двигатели серии 4А для моноблочных насосов (4А…Ж) 258
9.2.15. Двигатели серии 4А тропического исполнения (4А…Т) 258
9.2.16. Двигатели серии 4А химостойкого исполнения (4Л…Х) 259
9.2.17. Двигатели серии 4А сельскохозяйственного исполнения (4А…С, 4А…СХ) 259
9.2.18. Двигатели серии 4А влаго-морозостойкого исполнения (4А…ХЛ) .259
9.2.19. Двигатели серии 4А рудничного исполнения (4А…РН) 259
9.2.20. Двигатели серии 4А пылезачищенного исполнения (4А…УП) 260
9.2.21. Двигатели серии 4А для речных и морских судов гражданского флота (4А…ОМ) 260
9.2.22. Двигатели серии 4А высокоточные (4А…П 2) 263
9-2-23. Двигатели серии 4А лифтовые (4А…НЛБ) 266
9.2.24. Двигатели серии 4А частотно-регулируемые (4А…Б2П, ПБ) 268
9.2.25. Двигатели серии 4А для привода деревообрабатывающих станков (4АХД) 273
9.3. Асинхронные двигатели общего назначения: серии 4АМ 273
9.4. Асинхронные двигатели общего назначения серии АИ 280
9. 4.1. Характеристика серии. 280
4.1. Характеристика серии. 280
9.4.2. Двигатели серии АИ основного исполнения 281
9.5. Асинхронные двигатели серии АОЗ с высотами оси вращения 315, 355, 400 мм 293
9.6. Асинхронные двигатели серии A3 с высотой оси вращения 315 мм 297
9.7. Асинхронные двигатели серии АВШ 299
9.8. Асинхронные встраиваемые двигатели типов СВМ-6М, ЭД-1К, ЭД-ЗК 300
9.9. Асинхронные двигатели серии А2, АО2. 300
9.9.1. Двигатели серии А2, АО2 основного исполнения 301
9.9.2. Двигатели серии А2, АО2 с повышенным пусковым моментом (АОП2) 309
9.9.3. Двигатели серии АО2 с повышенным скольжением (АОС2) 310
9.9.4. Многоскоростные с двигатели серии А2, АО2 312
9.9.5. Двигатели серии А2, АО2 с фазным ротором (АОК2, АК2) 315
9.9.6. Двигатели серии А2 встраиваемые (АВ2, АПВ2, АСВ2) , 319
9.9.7. Двигатели серии А2, АО2 тропического исполнения (Т) 319
9.9.8. Двигатели серии А2, АО2 химостойкого исполнения (X) 319
9.9.9. Двигатели серии А2, АО2 сельскохозяйственного исполнения (СХ) 320
9. 9.10. Двигатели серии А2, АО2 влагоморозостойкого исполнения (ХЛ) 320
9.10. Двигатели серии А2, АО2 влагоморозостойкого исполнения (ХЛ) 320
9.9.11. Двигатели серии А2, АО2, уплотненные от проникновения пыли (УБ) 320
9.9.12. Двигатели серии A2t AO2 хладономаслостойкого исполнения (Ф) 321
9.9.13. Двигатели серии А2, АО2 для гражданского морского и речного флота (ОМ) 321
9.10. Асинхронные двигатели большой мощности 323
9.10.1. Асинхронные турбодвигатели серии АТД4 323
9.10.2. Асинхронные двигатели серий А4, АК4, ДА304 324
9.10.3. Асинхронные двигатели типа АДО 328
9.10.4. Асинхронные двигатели типа ВАКЗ 329
9.10.5. Вертикальные асинхронные двигатели серии ВАН 333
9.10.6. Асинхронные двигатели типов АОК2-560, АОК2-630 , 335
9.10.7. Асинхронные двигатели типа АКСБ 15-гогабарита 335
9.11. Асинхронные двигатели специального назначения 336
9.12. Фазорегуляторы и индукционные регуляторы напряжения 336
9.12.1. Индукционные регуляторы напряжения серии ИР 336
9.12.2. Индукционные регуляторы напряжения серии ИР-6 340
9. 12.3. Фазорегуляторы типов ФР, ФРО 341
12.3. Фазорегуляторы типов ФР, ФРО 341
Раздел 10. Машины постоянного тока 344
10.1. Общие сведения 344
10.1.1. Особенности коллекторных машин постоянного тока 344
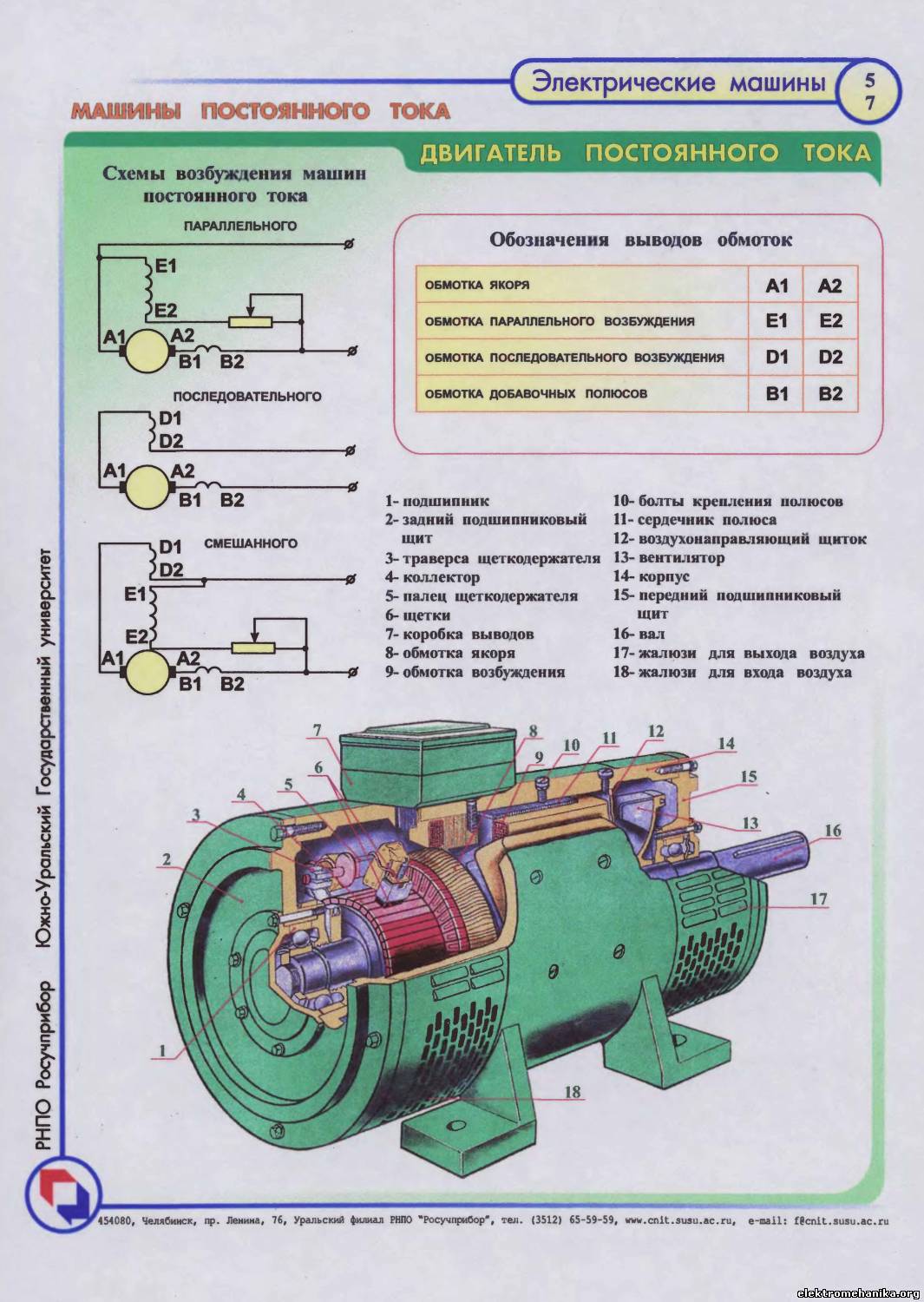
10.1.2. Основные элементы конструкции машин постоянного тока 344
10.1.3. Характеристики машин постоянного тока 348
10.1.4. Регулирование частоты вращения машин постоянного тока 349
10.1.5. Коммутация машин постоянного тока 350
10.2. Двигатели постоянного тока серии 4П 351
10.2.1. Общие сведения 351
10.2-2. Закрытые и обдуваемые двигатели унифицированной конструкции типов 4ПО и 4ПБ 352
10.2.3. Широкорегулируемые двигатели типа 4ПФ 360
10.2.4. Крупные двигатели серии 4П для тяжелых условий эксплуатации 367
10.3. Машины постоянного тока серии 2П 369
10.3.1. Общие сведения 369
10.3.2. Двигатели постоянного тока серии 2П 369
10.3.3. Генераторы постоянного тока серии 2П 392
10.4. Машины постоянного тока серии ТТ 399
10.4.1. Общие сведения 399
10. 4.2. Двигатели постоянного тока серии П 399
4.2. Двигатели постоянного тока серии П 399
10.4.3. Генераторы постоянного тока серии П 407
10.5. Двигатели постоянного тока серии ПБС (ПБСГ) 412
10.6. Двигатели постоянного тока серии ПС (ПСТ) 418
10.7. Замена машин постоянного тока общего назначения серий П, ПБС и ПС на серию 2П 420
10.8. Двигатели постоянного тока серии ПГ (ПГТ) 423
10.9. Двигатели постоянного тока серии ЭП 431
10.10. Двигатели постоянного тока типа ДВ75 431
10.11. Возбудители постоянного тока типа В18 432
10.12. Тахогенераторы постоянного тока серии ПТ 433
10.13. Машины постоянного тока большой мощности 434
10.13.1. Области применения и особенности эксплуатации 434
10.13.2. Двигатели для прокатных станов 435
10.13.3. Генераторы постоянного тока для питания двигателей прокатных станов 441
10.13.4. Крупные двигатели постоянного тока, отвечающие специальным требованиям 441
10.13.5. Двигатели постоянного тока для электроприводов шахтно-подъемных механизмов 442
10. 14. Перспективы развития конструкции; машин постоянного тока 443
14. Перспективы развития конструкции; машин постоянного тока 443
Список литературы 446
Предметный; указатель 447
Указатель серий и типов машин 449
ЧАСТЬ ТРЕТЬЯ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ МАЛОЙ МОЩНОСТИ ДЛЯ СИСТЕМ АВТОМАТИКИ
Раздел 11. Особенности электрических машин малой мощности для систем автоматики 5
11.1. Функциональное назначение и области применения 5
1L2, Методы и средства контроля параметров и характеристик электрических машин малой мощности для систем автоматики 7
11.3. Применение и эксплуатация электрических машин малой мощности для систем автоматики 21
Раздел 12. Асинхронные двигатели малой мощности для систем автоматики 36
12.1. Силовые асинхронные двигатели 36
12.2. Управляемые асинхронные двигатели 68
Раздел 13. Синхронные и шаговые двигатели для систем автоматики 93
13.1. Синхронные двигатели 93
13.2. Шаговые двигатели 104
Раздел 14. Двигатели постоянного тока малой мощности для систем автоматики 127
14. 1. Коллекторные двигатели постоянного тока 127
1. Коллекторные двигатели постоянного тока 127
14.2. Бесконтактные двигатели постоянного тока 166
Раздел 15. Электровентиляторы и электромагнитные муфты для систем автоматики 177
15.1. Электровентиляторы 177
15.2. Электромагнитные муфты , 215
Раздел 16. Вращающиеся трансформаторы и сельсины 221
16.1. Вращающиеся трансформаторы 221
16.2. Сельсины 261
Раздел 17. Фазовращатели и датчики угла 277
17.1 Фазовращатели индукционные 277
17.2. Датчики угла индукционные 282
Раздел 18. Тахогенераторы и двигатель-генераторы 290
18.1. Тахогенераторы постоянного тока 290
18.2. Асинхронные тахогенераторы 297
18.3. Синхронные тахогенераторы 304
18.4. Двигатель-генераторы 311
ЧАСТЬ ЧЕТВЕРТАЯ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
Раздел 19. Крановые и металлургические двигатели 336
19.1. Особенности крановых и металлургических двигателей 336
19.2. Краново-металлургические двигатели 336
19.3. Металлургические двигатели 344
Раздел 20. Тяговые электрические машины 351
Тяговые электрические машины 351
20.1. Особенности тяговых электрических машин 351
20.2. Тяговые электрические машины для тепловозов 352
20.3. Тяговые двигатели для электровозов 358
20.4. Тяговые двигатели для городского транспорта 358
20.5. Двигатели для самоходных кранов и электропоездов 361
20.6. Тяговые двигатели для трансмиссий транспортных средств с дизель-электрическим приводом (двигатели мотор-колес) 362
20.7. Двигатели для аккумуляторных подъемно-транспортных машин и электромобилей 364
20.8. Тяговые взрывозащищенные двигатели для привода рудничных электровозов 370
Раздел 21. Экскаваторные электрические машины 382
21.1. Крупные экскаваторные двигатели и генераторы постоянного тока 382
21.2. Экскаваторные генераторы постоянного тока мощностью до 1000 кВт 389
21.3. Экскаваторные синхронные двигатели серии СДЭ2 390
21.4. Двигатели постоянного тока для экскаваторов, выполненные на базе крановых двигателей 393
21. 5. Агрегат преобразовательный типа АПЭ-ЭШ 15/90А для экскаваторов 396
5. Агрегат преобразовательный типа АПЭ-ЭШ 15/90А для экскаваторов 396
Раздел 22. Судовые электрические машины 397
22.1. Особенности судовых электрических машин 397
22.2. Судовые синхронные генераторы серии МСК 398
22.3. Судовые синхронные генераторы серии СБГ 402
22.4. Двигатели постоянного тока судовые серии ДПМ 404
22.5. Асинхронные двигатели серии МАП для судовых механизмов 408
22.6. Асинхронные судовые двигатели МАФ85 и МАФ95 413
Раздел 23. Двигатели постоянного тока для широкорегулируемых электроприводов, промышленных роботов и следящих систем 415
23.1. Двигатели постоянного тока для промышленных роботов и гибких производственных систем 415
23.2. Высокомоментные двигатели постоянного токa для электроприводов подач металлорежущих станков 421
23.3. Вентильные двигатели для приводов подач роботов и манипуляторов 431
Раздел 24. Взрывозащищенные электрические машины 436
24Л. Особенности и классификация взрывозащищенного электрооборудования 436
24. 2. Асинхронные взрывозащищенные двигатели серии МАЗ 6, МА37 437
2. Асинхронные взрывозащищенные двигатели серии МАЗ 6, МА37 437
24.3. Асинхронные взрывозащищенные двигатели типов МТА93-6/12У5 и МКА93-4/8У5 447
24.4. Асинхронные взрывозащищенные двигатели серии К, КО 449
24.5. Асинхронные взрывозащищенные двигатели типов АВК и АВТ 456
24.6. Асинхронные взрывозащищенные двигатели для привода механизмов очистных забоев угольных шахт 458
24.7. Асинхронные взрывозащищенные двигатели серии ВАСО 467
24.8. Асинхронные взрывозащищенные двигатели серии ВАО мощностью до 100 кВт 471
24.9. Асинхронные взрывозашищенные двигатели мощностью более 100 кВт 492
24.10. Асинхронные взрывозащищенные двигатели типа ВАОВ мощностью 400, 800, 1250, 2000 кВт 496
24.11. Асинхронные взрывозащищенные двигатели серии ВАО2 497
24.12. Асинхронные взрывозащищенные двигатели «Украина» 507
24.13. Асинхронные взрывозащищенные двигатели типа 2АЗМВ1 508
24.14. Асинхронные взрывозащищенные двигатели серии В, ВР 511
24.15. Асинхронные взрывозащищенные двигатели
. ..
..
Копылов И.П. Справочник по электрическим машинам. Том 1
- формат djvu
- размер 5.39 МБ
- добавлен
11 июля 2008 г.
М.: Энергоатомиздат, 1988.—456 с.
Под общ. ред. И. П. Копылова и Б. К. Клокова.
В 2 т.
ISBN 5-283-00500-3
Приведены технические данные, описаны особенности конструкций и
области применения электрических машин, выпускаемых предприятиями
электротехнической промышленности СССР. Дана классификация
электрических машин, описаны системы охлаждения, типы и особенности
конструкций обмоток, приведены методы испытаний электрических
машин. Том первый содержит технические данные машин общего
назначения и крупных машин различных типов. Том второй выйдет в
1989 г.
Для инженеров и техников, занятых эксплуатацией электрических
машин, проектированием электрического оборудования различных
предприятий, промышленных объектов и установок.
Содержание книги
Справочник по электрическим машинам
Обшиe сведения
Общие понятия и определения
Основные типы и классификация электрических машин
Преобразование энергии в электрических машинах
Математические модели электрических машин
Параметры электрических машин
Термины и определения
Надежность электрических машин
Основные понятия
Показатели надежности
Причины отказов
Аттестация качества электрических машин
Вибрация и шумы электрических машин
Источники вибрации и шума электрических машин
Показатели вибрации электрических машин
Измерения шума и вибрации
Стандартизация в электромашиностроении
Общие сведения и задачи стандартизации
Параметры электрической энергии
Внешние воздействующие факторы
Номинальные данные и установочно-присоединительные размеры
электрических машин
Конструктивное исполнение электрических машин по способу
монтажа
Нагрев и охлаждение электрических машин
Распределение потерь по объему и нагрев электрических машин
Допустимая температура частей электрических машин
Режимы работы электрических машин
Охлаждение электрических машин
Обмотки электрических машин
Типы обмоток электрических машин
Конструктивное исполнение обмоток машин переменного тока
Обмоточный коэффициент
Обозначение выводов обмоток машин переменного тока
Схемы трехфазных распределенных обмоток
Однослойные обмотки
Двухслойные петлевые обмотки
Обмотки с дробным числом пазов на полюс и фазу
Стержневые волновые обмотки машин переменного тока
Обмотки для механизированной укладки
Обмотки многоскоростных асинхронных двигателей
Особенности схем обмоток двухфазных и однофазных двигателей
Обмотки якорей машин постоянного тока
Особенности конструктивного выполнения обмоток якоря
Петлевые обмотки якоря
Волновые обмотки якоря
Компенсационные обмотки машин постоянного тока
Обозначение выводов обмоток машин постоянного тока
Обмотки возбуждения
Обмотки возбуждения синхронных машин
Обмотки возбуждения машин постоянного тока
Промышленные испытания электрических машин
Виды промышленных испытаний
Программы приемочных и приемосдаточных испытаний
Нормы и методы испытаний новых машин
Измерение сопротивления изоляции
Измерение сопротивления обмоток при постоянном токе
Испытание изоляции на электрическую прочность
Испытание междувитковой изоляции обмоток
Испытание на кратковременную перегрузку по току
Испытания при повышенной частоте вращения
Испытание на нагревание
Определение коэффициента полезного действия
Измерение вибрации и уровня шума
Характеристики и параметры электрических машин
Испытания на надежность
Задачи и методы испытаний
Контрольные испытания
Определительные испытания
Диагностика и прогнозирование технического состояния электрических
машин
Выбор показателей работоспособности
Эксплуатация электрических машин
Общие положения
Основные задачи эксплуатации
Основные понятия, характеризующие эксплуатацию электрических
машин
Хранение электрических машин
Условия хранения электрических машин
Классификация помещений с электроустановками и размещение
электрооборудования
Выбор электродвигателей
Выбор электродвигателей по роду тока, конструктивному исполнению,
классу вибрации и уровню шума
Выбор электродвигателей по мощности
Выбор электродвигателей для различных режимов работы
Основные причины отказов электрических машин
Виды неисправностей и причины их появления
Выбор защиты электродвигателей
Организация и нормы ремонта электрических машин
Общие вопросы ремонта электрических машин
Объем работ по техническому обслуживанию и ремонту
Испытание электрических машин при ремонте
Организация электроремонтного производства
Технические условия и организация ремонта
Технические условия ремонта
Структура электроремонтного предприятия
Электрические машины общего назначения
Синхронные машины
Общие сведения
Турбогенераторы
Общая характеристика
Турбогенераторы с воздушным охлаждением серии Т
Турбогенераторы с водородным охлаждением серии ТВФ
Турбогенераторы с водородно-водяным охлаждением серии ТВВ
Турбогенераторы с полным водяным охлаждением серии ТЗВ
Турбогенераторы серии ТГВ и ТВМ
Системы возбуждения, регулирования и защиты
Режимы работы турбогенераторов
Ударные турбогенераторы
Гидрогенераторы
Классификация гидрогенераторов
Конструкция и технические данные вертикальных гидрогенераторов
нормального исполнения
Гидрогенератор для Саяно-Шушенской ГЭС
Гидрогенератор для ГЭС Сальто-Гранде
Гидрогенератор для Верхне-Териберской ГЭС
Гидрогенератор для ГЭС Пурнари
Генераторы-двигатели для ГАЭС
Особенности конструкции и технические данные капсульных
гидрогенераторов
Капсульный гидрогенератор для ГЭС Джердап II — Железные ворота
II
Капсульный гидрогенератор для Даугавпилсской ГЭС
Системы возбуждения гидрогенераторов
Режимы работы гидрогенераторов
Синхронные явнополюсные генераторы для автономных энергетических
систем
Особенности генераторов автономных систем
Синхронный генератор типа СГ 2-85/45-12
Синхронный генератор типа СГД 103-8
Синхронные генераторы типа СГД 625-1500 и СГД 625-1500М
Синхронные генераторы серии СГД2 и СГД2М 17-го габарита
Синхронный генератор типа БГСП 17-61-8
Синхронные генераторы серий ОС и ЕСС
Синхронные генераторы типа ГСФ
Синхронные генераторы типа ГАБ
Синхронные компенсаторы
Назначение синхронных компенсаторов
Синхронные компенсаторы с воздушным охлаждением
Синхронные компенсаторы с водородным охлаждением
Бесщеточная система возбуждения компенсаторов
Похожие разделы
- Стандарты
- Стандарты России
- ГОСТ Р
- ГОСТ Р Топливно-энергетический комплекс
- ГОСТ Р Электрические машины
Смотрите также
- формат pdf
- размер 343.
 28 КБ
28 КБ - добавлен
17 сентября 2010 г.
 28 КБ
28 КБСПб.: СЗТУ, 2005. -33с. Дисциплина представляет собой изложение научных основ гидравлики, аэродинамики и теории теплообмена применительно к электрическим машинам. Рассмотрены типы систем охлаждения электрических машин, теоретические и прикладные вопросы вентиляционного и теплового расчетов.
- формат doc
- размер 2.2 МБ
- добавлен
05 июля 2011 г.
Общие сведения об электрическим машинам. Трансформаторы. Асинхронные машины. Синхронные машины. Машины постоянного тока. Электромашинные преобразователи тока. Коллекторные машины переменного тока.
- формат tif
- размер 13.87 МБ
- добавлен
04 апреля 2009 г.

Книга представляет собой методические указания к проведению виртуальных лабораторных работ по электрическим машинам. «Приборной базой» проведения этих лабораторных работ являются пакеты расширения Simulink и SimPoverSystem. В библиотеках этих пакетов имеются многочисленные виртуальные элементы и многочисленные измерительные приборы, что позволяет всесторонне исследовать электрическую цепь любой сложности. Книга выложена в картинках.rn
- формат djvu
- размер 5.04 МБ
- добавлен
13 ноября 2009 г.
Под ред. Б. А. Делибаша, А. Д. Смирнова, Б. А. Соколова. — М.: Энергия, 1979. — 200 с, ил. — (Справочник электромонтажника). В справочнике приведены основные технические данные по электрическим машинам и силовым трансформаторам, необходимые для монтажа машин и трансформаторов; данные по сборке их, установке, сушке, испытанию и включению в эксплуатацию; перечни материалов, инструментов и приспособлений, применяемых при монтаже машин и трансформат. ..
..
- формат doc
- размер 3.28 МБ
- добавлен
25 ноября 2008 г.
2002. – 145 с. Семестровый курс лекций по электрическим машинам СПбГУ ИТМО. решение магнитных цепей. трансформаторы. машины переменного тока. синхронные двигатели. двигатели постоянного тока различных конструкций. информационные машины. шаговые двигатели.
- формат djvu
- размер 5.25 МБ
- добавлен
26 сентября 2008 г.
Учеб. пособие для студ. образоват. учреждений сред. проф. образования / Марк Михаилович Кацман. — М.: Издательский центр «Академия», 2005 г. — 480 с. ISBN 5-7695-1686-0 В справочнике приведены технические данные по электрическим машинам как общего, так и специального назначения, широко применяемым в современном электроприводе. Рассмотрены вопросы выбора и расчета мощности электродвигателей для электропривода в наиболее используемых режимах его ра…
Рассмотрены вопросы выбора и расчета мощности электродвигателей для электропривода в наиболее используемых режимах его ра…
- формат doc
- размер 28.6 МБ
- добавлен
22 мая 2010 г.
М.: Энергоатомиздат, 1988 Общие сведения. Электрические машины общего назначения. Синхронные, асинхронные машины. Машины постоянного токаrn
Словарь
- формат pdf
- размер 880.43 КБ
- добавлен
02 октября 2011 г.
Лавриненко В.А. (cост.). Электрические машины: Словарь-справочник. Чебоксары, ЧувГУ, Россия, 2006. — 114 с. Содержатся термины, определения и краткая информация по электрическим машинам. Приведены эквиваленты терминов на английском языке. Для специалистов электротехнических предприятий и учреждений. Может быть полезен преподавателям и студентам.
Приведены эквиваленты терминов на английском языке. Для специалистов электротехнических предприятий и учреждений. Может быть полезен преподавателям и студентам.
- формат djvu
- размер 4.38 МБ
- добавлен
13 ноября 2008 г.
В учебном пособии излагаются основные сведения по электрическим машинам постоянного и переменного тока, трансформаторам, а также основы теории электропривода. Приведены примеры решения основных типов задач по электрическим машинам с использованием международной системы единиц (СИ), а для самопроверки даны контрольные вопросы. В пособие включены лабораторные работы, предусмотренные программой курса. Книга написана в соответствии с программой курса…
- формат djvu
- размер 6.2 МБ
- добавлен
05 апреля 2010 г.
В учебном пособии излагаются основные сведения по электрическим машинам постоянного и переменного тока, трансформаторам, а так же теории электропривода.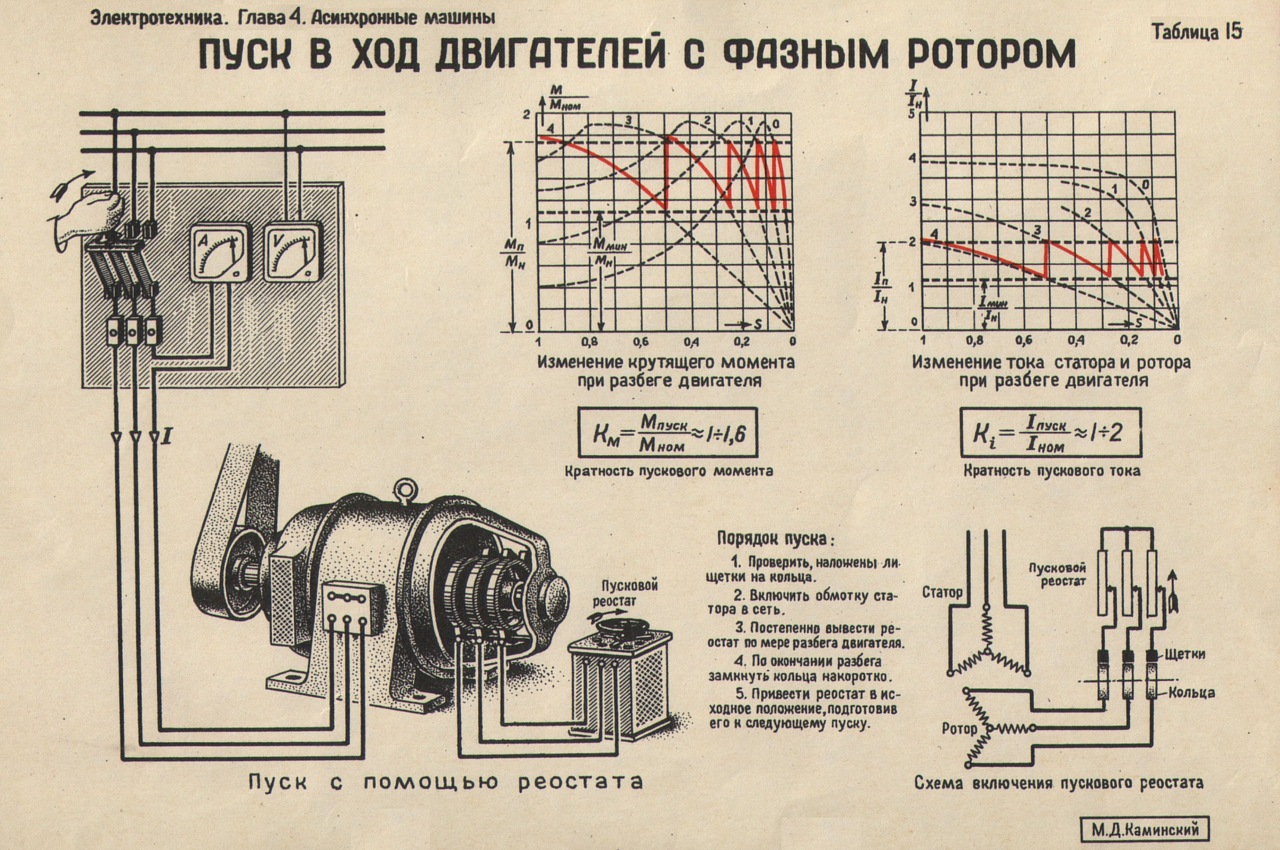
систем отсчета для анализа синхронных машин
Учитесь на знаниях сообщества. Эксперты добавляют свои идеи в эту совместную статью на основе ИИ, и вы тоже можете.
Это новый тип статьи, которую мы начали с помощью ИИ, и эксперты продвигают ее вперед, делясь своими мыслями непосредственно в каждом разделе.
Если вы хотите внести свой вклад, запросите приглашение, поставив лайк или ответив на эту статью.
Узнать больше
— Команда LinkedIn
Последнее обновление:
27.04.2023
Синхронные машины широко используются в энергосистемах для производства, передачи и преобразования электрической энергии. Чтобы проанализировать их характеристики и динамику, часто бывает полезно преобразовать переменные и уравнения из физической системы отсчета (статор и ротор) во вращающуюся систему отсчета (d-q или систему Парка). Однако существуют и другие системы отсчета, которые можно использовать для различных целей, такие как стационарная система отсчета (a-b-c или система Кларка) или синхронная система отсчета (d’-q’ или система Крона). В этой статье вы узнаете о преимуществах и недостатках этих различных систем отсчета для анализа синхронных машин.
Однако существуют и другие системы отсчета, которые можно использовать для различных целей, такие как стационарная система отсчета (a-b-c или система Кларка) или синхронная система отсчета (d’-q’ или система Крона). В этой статье вы узнаете о преимуществах и недостатках этих различных систем отсчета для анализа синхронных машин.
Физический фрейм
Физический фрейм — это наиболее интуитивно понятный и простой способ представить синхронную машину, поскольку он соответствует фактической геометрии и конструкции машины. В этом кадре обмотки статора и ротора моделируются синусоидальными источниками напряжения и тока, а электромагнитный момент и мощность рассчитываются взаимодействием потоков статора и ротора. Основное преимущество этой системы координат состоит в том, что она сохраняет физический смысл и интерпретацию переменных и параметров, а также легко применять методы анализа цепей. Основным недостатком является то, что уравнения нелинейны и меняются во времени из-за вращения ротора и периодического характера синусоидальных функций. Это делает анализ более сложным и трудным, особенно для исследований переходных процессов и стабильности.
Это делает анализ более сложным и трудным, особенно для исследований переходных процессов и стабильности.
Вращающаяся система координат
Вращающаяся система координат — это распространенный и удобный способ упростить анализ синхронных машин путем преобразования переменных и уравнений в систему отсчета, которая вращается с постоянной скоростью. Наиболее широко используемой вращающейся рамой является рама d-q, которая совмещена с осью потока ротора (ось d) и квадратурной осью (ось q) машины. В этом кадре обмотки статора и ротора моделируются постоянными источниками напряжения и тока, а электромагнитный момент и мощность рассчитываются произведением токов по осям d и q. Основное преимущество этой системы координат состоит в том, что она устраняет изменение во времени и нелинейность уравнений, а также позволяет использовать методы линейного управления и пространства состояний. Основным недостатком является то, что он теряет физический смысл и интерпретацию переменных и параметров и требует матрицы преобразования для преобразования между физическим и вращающимся кадрами.
Стационарная система координат
Стационарная система координат — это еще один способ упростить анализ синхронной машины путем преобразования переменных и уравнений в систему отсчета, закрепленную на статоре. Наиболее широко используемой стационарной рамой является рама a-b-c, которая совмещена с фазами статора (фаза a, фаза b и фаза c) машины. В этом кадре обмотки статора и ротора моделируются сбалансированными трехфазными источниками напряжения и тока, а электромагнитный момент и мощность рассчитываются путем инвариантного преобразования мощности переменных a-b-c. Основное преимущество этого кадра состоит в том, что он сохраняет сбалансированный трехфазный характер системы и не требует матрицы преобразования для преобразования между физическим и стационарным кадрами. Основным недостатком является то, что он по-прежнему сохраняет некоторую нелинейность и изменение уравнений во времени из-за вращения ротора и фазового сдвига синусоидальных функций. Это делает анализ менее простым и элегантным, чем вращающаяся рамка.
Это делает анализ менее простым и элегантным, чем вращающаяся рамка.
Синхронная система координат
Синхронная система координат является менее распространенным, но полезным способом обобщения анализа синхронных машин путем преобразования переменных и уравнений в систему отсчета, которая вращается с переменной скоростью. Наиболее широко используемой синхронной рамкой является рама d’-q’, которая совмещена с осью потока ротора (ось d’) и квадратурной осью (ось q’) машины. В этом кадре обмотки статора и ротора моделируются переменными источниками напряжения и тока, а электромагнитный момент и мощность рассчитываются произведением токов по осям d’ и q’. Основное преимущество этой рамы заключается в том, что она может приспособиться к любым изменениям скорости вращения ротора, таким как проскальзывание или отклонение частоты, а также к неуравновешенным или искаженным состояниям системы. Основным недостатком является то, что он вводит дополнительные переменные и уравнения для учета изменения скорости и преобразования системы отсчета, а также требует больших вычислительных усилий и точности.
Вот что еще нужно учитывать
Здесь можно поделиться примерами, историями или идеями, которые не вписываются ни в один из предыдущих разделов. Что бы вы еще хотели добавить?
Оцените эту статью
Мы создали эту статью с помощью ИИ. Что вы думаете об этом?
Это здорово
Это не так здорово
Спасибо за ваш отзыв
Ваш отзыв является частным. Поставьте лайк или отреагируйте, чтобы перенести разговор в свою сеть.
Моделирование динамики упрощенного трехфазного синхронного
машина
Основное содержание
Моделирование динамики упрощенного трехфазного синхронного
машина
Библиотека
Simscape / Electrical / Specialized Power Systems / Electrical Machines
Описание
Блок Simplified Synchronous Machine моделирует электрические и
механические характеристики простой синхронной машины.
Электрическая система для каждой фазы состоит из источника напряжения
последовательно с импедансом RL, который реализует внутренний импеданс
машины. Значение R может быть равно нулю, но значение L должно
будь позитивным.
Блок Simplified Synchronous Machine реализует механическую систему
описывается выражением
Δω(t)=12H∫0t(Tm−Te) −KdΔω(t)dtω(t)=Δω(t)+ω0,
, где
Δ ω = изменение скорости
по скорости работы
Ч =
постоянная инерции
Tm = механическая
крутящий момент
Te = электромагнитный крутящий момент
Kd = коэффициент демпфирования, представляющий
влияние демпферных обмоток
ω ( t )
= механическая скорость ротора
ω 0 =
скорость работы (1 о.е.)
Хотя параметры можно вводить как в единицах СИ, так и
за единицу в диалоговом окне, внутренние расчеты выполняются в
за единицу. На следующей блок-схеме показано, как механическое
часть модели реализована. Модель вычисляет отклонение с
Модель вычисляет отклонение с
отношение к скорости работы; а не сама абсолютная скорость.
Коэффициент демпфирования Kd имитирует эффект демпфирующих обмоток
обычно используется в синхронных машинах. Когда машина подключена
к бесконечной сети (нулевой импеданс), изменение машины
дельта угла мощности (δ) в результате изменения механического
мощность ( P м ) может быть приблизительно
следующей передаточной функцией второго порядка:
δPm=ωs/(2H)s2+2ζωns+ωn2,
где0002 δ
Дельта угла мощности: угол внутреннего напряжения E с
относительно напряжения на клеммах, в радианах
P м
Механическая мощность в о.е.
Частота электромеханических колебаний = ωsPmax/(2H) in рад/с
ζ
Коэффициент демпфирования = (Kd/4)2/(ωsHPmax)
ω с
Электрическая частота в рад/с
9 0093 P макс.
Максимальная мощность в pu, передаваемая через реактивное сопротивление X при
напряжение на клеммах В t и
внутреннее напряжение E . P max = V t E / X ,
где В т , Е ,
и X в единицах у.е. K d
Коэффициент демпфирования (pu_of_крутящий момент / pu_of_скорость)
Эта приблизительная передаточная функция, которая была получена
предполагая sin(δ) = δ, справедливо для малых степенных углов (δ
< 30 градусов). Из предыдущего выражения ζ следует
что значение Kd, необходимое для получения данного коэффициента демпфирования ζ:
Kd=4ζωsHPmax/2.
Параметры
В библиотеке Machines вы можете выбрать между единицами SI или единицами pu Упрощенный
Блоки Synchronous Machine для указания электрических и механических параметров
модель. Эти два блока имитируют точно такую же упрощенную модель синхронной машины;
Эти два блока имитируют точно такую же упрощенную модель синхронной машины;
единственная разница заключается в том, как вы вводите единицы измерения параметра.
Вкладка «Конфигурация»
- Тип соединения
Укажите количество проводов, используемых в трехфазном соединении Y:
трехпроводной (нейтраль недоступна) или четырехпроводной (нейтраль доступна).
По умолчанию3-жильный Y.- Механический ввод
Выберите механическую мощность, подаваемую на вал или ротор
скорость как вход Simulink ® блока или для представления машины
вал вращательным механическим портом Simscape™.Выберите
Механическая мощность Pm(по умолчанию)
указать потребляемую механическую мощность в Вт или в pu и изменить маркировку
блока ввода наPm. Скорость машины
определяется машиной Инерция J (или постоянная инерции H для
пу машины) и разницей между механическим моментом Тм ,
в результате приложенной механической мощности Pm ,
и внутренний электромагнитный момент Te .
соглашение о знаках механической мощности — когда скорость положительна,
положительный сигнал механической мощности указывает на режим генератора, а
отрицательный сигнал указывает на двигательный режим.Выберите
Speed w, чтобы указать скорость
input, в рад/с или в pu, и измените маркировку входа блока наw.
Задается скорость машины и механическая часть модели
(постоянная инерции H) игнорируется. Использование скорости в качестве механического
input позволяет моделировать механическое соединение между двумя машинами.На следующем рисунке показано, как моделировать жесткое соединение валов.
в мотор-генераторной установке, когда момент трения в машине игнорируется
2. Выход скорости машины 1 (двигатель) связан со скоростью
вход машины 2 (генератора), а электромагнитный момент машины 2
выход Te подается на вход механического крутящего момента Tm
машина 1. Фактор кВт учитывает единицы скорости обеих машин
(pu или rad/s) и передаточное отношение коробки передач w2/w1. Коэффициент КТ учитывает
единицы крутящего момента обеих машин (pu или Нм) и номинальные характеристики машины. Также,
поскольку инерция J2 игнорируется в машине 2, J2 относится к машине
К инерции машины 1 J1 необходимо добавить 1 скорость.Выберите
Механический порт вращениядля
добавить в блок механический поворотный порт Simscape, который позволяет
соединение вала машины с другими блоками Simscape, имеющими
механические поворотные порты. Вход Simulink, представляющий
механическая мощность Pm или скоростьВт
затем машина снимается с блока.На следующем рисунке показано, как подключить идеальный источник крутящего момента
блок из библиотеки Simscape на вал машины для представления
машина в режиме двигателя или в режиме генератора, когда скорость ротора
положительный.- Использовать имена сигналов для идентификации меток шин
имена сигналов для идентификации меток шины. Выберите этот параметр для
приложения, требующие, чтобы метки сигналов шины содержали только буквенно-цифровые символы.
персонажи. Значение по умолчанию очищено.Если этот флажок снят, для выходных данных измерений используется
определение сигнала для идентификации меток шины. Этикетки содержат
не буквенно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.

 Коэффициент КТ учитывает
Коэффициент КТ учитывает
Вкладка «Параметры»
- Номинальная мощность, междуфазное напряжение,
и частота Номинальная полная мощность Pn (ВА), частота fn (Гц) и среднеквадратичное значение
междуфазное напряжение Vn (В). Вычисляет номинальный крутящий момент и преобразует
единицы СИ в pu. По умолчанию[187e6 13800 60].- Инерция, коэффициент демпфирования и пары
полюсов Инерция (J в кг.м 2 или H в секундах)
коэффициент демпфирования (Kd) и количество пар полюсов (p). Демпфирование
коэффициент должен быть указан в (pu крутящего момента)/(pu скорости) в обеих машинах
диалоговые окна (в пу и в СИ). По умолчанию[3,7 0 20]для
pu и[3.для SI. 895e6 0 20] - Внутренний импеданс
Сопротивление R (Ом или о.е.) и реактивное сопротивление L (H или о.е.) для
каждую фазу. Значение по умолчанию:[0,02 0,3]для о.е. и[0,0204для СИ.
0,8104e-3]- Начальные условия
Начальное отклонение скорости (% от номинальной), угол ротора (градусы),
величины линейного тока (A или pu) и фазовые углы (градусы). Эти
значения автоматически вычисляются утилитой потока нагрузки
Блок питания. По умолчанию[ 0,0 0,0,0 0,0,0 ].- Шаг расчета (-1 для унаследованного)
Определяет шаг расчета, используемый блоком. Чтобы унаследовать
шаг расчета, указанный в блоке Powergui, установите этот параметр на-1.
По умолчанию−1.
 895e6 0 20]
895e6 0 20] Вкладка «Дополнительно»
Чтобы включить вкладку «Дополнительно», установите параметр Тип моделирования
блок powergui на Discrete и, на
Вкладка Preferences , снимите флажок Автоматически обрабатывать дискретные
параметры решателя и решателя вкладки «Дополнительно» блоков .
- Модель дискретного решателя
Задает метод интегрирования, используемый блоком. Выбор
Трапециевидный неитеративный(по умолчанию),
Трапециевидная робастнаяиОбратный Эйлер.
надежныйПри выборе Автоматически обрабатывать дискретный решатель и Расширенный
вкладка солвер настройки блоков параметр в powergui
блок, модель дискретного решателя автоматически устанавливается наТрапециевидный.
надежныйТрапециевидный неитеративныйтребует добавления
незначительная шунтирующая нагрузка на клеммах машины для поддержания стабильности моделирования,
и симуляция может не сойтись и остановиться, когда количество машин увеличится.
в модели.Прочный трапециевидныйиОбратный Эйлерпозволяют исключить необходимость использования паразитных нагрузок.
Надежные К
устранить топологические ошибки машин, подключенных к индуктивной цепи
(например, автоматический выключатель, включенный последовательно с машиной), машина
моделирует незначительную внутреннюю нагрузку0,01% от номинальной мощности.Прочный трапециевидныйнемного точнее, чем
Обратный Эйлер робастный, особенно когда модель
моделируются на больших шагах выборки.Трапециевидный прочныймай
производить небольшие затухающие числовые колебания напряжения машины в условиях холостого хода,
в то время какОбратный Эйлер надежныйпредотвращает колебания и
сохраняет точность.Для получения дополнительной информации о том, какой метод использовать в вашем приложении, см. Моделирование дискретных электрических систем.
- Время выборки (-1 для унаследованного)
Определяет шаг расчета, используемый блоком.
Чтобы унаследовать указанный шаг расчета
в блоке powergui установите для этого параметра значение-1
(по умолчанию).
 К
К Чтобы унаследовать указанный шаг расчета
Чтобы унаследовать указанный шаг расчетаВкладка «Распределение нагрузки»
Параметры потока нагрузки определяют параметры блока для использования с инструментом «Поток нагрузки»
Блок питания. Эти параметры потока нагрузки предназначены для инициализации модели.
только. Они не влияют на блочную модель или на производительность моделирования.
Конфигурация вкладки Load Flow
зависит от опции, выбранной для параметра Generator type .
- Тип генератора
Укажите тип генератора машины.
Выберите
качелидля реализации генератора
контроль величины и фазового угла напряжения на его клеммах.
Величина опорного напряжения и угол определяются преобразователем Swing.
напряжение на шине или фотоэлектрической шине и Угол напряжения на шине качания параметры
блока Load Flow Bus, соединенного с машинными терминалами.Выберите
PV(по умолчанию) для реализации
генератор, контролирующий свою выходную активную мощность P и величину напряжения
V. P определяется параметром Active power Generation P .
блока. V определяется шиной Swing или шиной PV.
напряжение параметр блока Load Flow Bus подключен
к терминалам машины. Вы можете контролировать минимум и максимум
реактивная мощность, вырабатываемая блоком с использованием Минимум
реактивная мощность Qmin и Максимальная реактивная мощность
Параметры Qmax .Выберите
PQдля реализации генератора
контролируя его выходную активную мощность P и реактивную мощность Q. P и
Q определяются Активная выработка мощности P и Реактивная
мощность генерации Q параметры блока соответственно.- Выработка активной мощности P
Укажите активную мощность, которую вы хотите вырабатывать машиной,
в ваттах. Когда машина работает в моторном режиме, вы указываете отрицательное
ценить. Этот параметр доступен, если вы укажете Генератор
тип какPVилиPQ.
По умолчанию0.- Выработка реактивной мощности Q
Укажите реактивную мощность, которую вы хотите вырабатывать машиной,
в варс. Отрицательное значение указывает на то, что реактивная мощность поглощается
машиной. Этот параметр доступен, только если вы укажете генератор .
введите какPQ. По умолчанию0.- Минимальная реактивная мощность Qmin
Этот параметр доступен, только если вы укажете Генератор
тип какPV. Указывает минимум
реактивная мощность, которая может быть выработана машиной при сохранении
напряжение на клеммах при его эталонном значении. Это опорное напряжение
определяется параметром шины Swing или напряжением шины PV
блока Load Flow Bus, соединенного с машинными терминалами.
значение по умолчанию-inf, что означает наличие
отсутствие нижнего предела реактивной мощности. По умолчанию-инф.- Максимальная реактивная мощность Qmax
Этот параметр доступен, только если вы укажете Генератор
тип какPV. Указывает максимальное
реактивная мощность, которая может быть выработана машиной при сохранении
напряжение на клеммах при его эталонном значении. Это опорное напряжение
определяется параметром шины Swing или напряжением шины PV
блока Load Flow Bus, соединенного с машинными терминалами.
значение по умолчанию+inf, значит есть
отсутствие верхнего предела реактивной мощности. По умолчанию+inf.

 Когда машина работает в моторном режиме, вы указываете отрицательное
Когда машина работает в моторном режиме, вы указываете отрицательное
Входы и выходы
-
Pm Механическая мощность, подаваемая на машину, в ваттах. Вход может быть константой
сигнал или он может быть подключен к выходу гидравлической турбины и
Губернаторский блок. Частота внутренних источников напряжения зависит от
механическая скорость машины.-
w Альтернативный ввод блока вместо
Pm(в зависимости
на значение параметра Механический вход )
— скорость машины, в рад/с.-
E Амплитуда внутренних напряжений блока. Он может
быть постоянным сигналом или он может быть подключен к выходу напряжения
регулятор. Если вы используете машину с единицами СИ, этот ввод должен быть в
вольт между фазами RMS. Если вы используете машину единиц pu, она должна
быть в пу.-
m Выход Simulink блока представляет собой вектор, содержащий
измерительные сигналы. Вы можете демультиплексировать эти сигналы с помощью
Блок Bus Selector предоставляется в библиотеке Simulink. В зависимости
в зависимости от типа маски, которую вы используете, единицы измерения находятся в СИ или в о.е.Название
Определение
Единицы
906 23
ias
Ток статора is_a
A или pu
ibs
9014 0
Ток статора is_b
A или pu
ics
Статор ток is_c
A или pu
va
Напряжение на клеммах Va
V или упак.
vb
Напряжение на клеммах Vb
В или pu
vc
90 137
Напряжение на клеммах Vc
В или о.у.
шт.
Внутренний напряжение Ea
В или pu
eb
Внутреннее напряжение Eb
В или упак.
ec
Внутреннее напряжение Ec
В или о.е.
тета
90 137
Угол ротора тета
рад
w
Скорость ротора, мм
рад/с
Pe
Электрическая мощность Pe
Вт 900 03
 Частота внутренних источников напряжения зависит от
Частота внутренних источников напряжения зависит от
Допущения
Электрическая система блока Simplified Synchronous Machine состоит
исключительно источника напряжения за синхронным реактивным сопротивлением и сопротивлением. Все остальные само-
Все остальные само-
индуктивностями намагничивания якоря, возбуждения и демпфирующей обмоток пренебрегают.
влияние демпфирующих обмоток аппроксимируется коэффициентом демпфирования Kd. Три источника напряжения
и ответвления импеданса RL соединены Y-образно (три провода или четыре провода). Нагрузка может или может
не быть уравновешенным.
Ограничения
Когда вы используете блоки Simplified Synchronous Machine в дискретных системах, вы
возможно, придется использовать небольшую резистивную паразитную нагрузку, подключенную к клеммам машины, чтобы
избежать числовых колебаний. Большие времена расчета требуют больших нагрузок. Минимальное сопротивление
нагрузка пропорциональна времени расчета. Помните, что при временном шаге 25 мкс на частоте 60 Гц
системы, минимальная нагрузка составляет примерно 2,5% от номинальной мощности машины. Например,
Упрощенная синхронная машина мощностью 200 МВА в энергосистеме, дискретизированная с периодом дискретизации 50 мкс
требуется примерно 5% резистивной нагрузки или 10 МВт. Если время выборки уменьшить до 20 мкс,
Если время выборки уменьшить до 20 мкс,
резистивная нагрузка 4 МВт должна быть достаточной.
Примеры
power_simplealt
пример использует блок Simplified Synchronous Machine для представления 1000 МВА,
Эквивалентный источник 315 кВ, 60 Гц, подключенный к бесконечной шине (трехфазное программируемое напряжение).
Исходный блок). Блок Simplified Synchronous Machine (SI Units) используется как синхронный
генератор. Внутреннее сопротивление и реактивное сопротивление установлены соответственно на 0,02 о.е. (1,9845 Ом).
и 0,2 о.е. (X = 19,845 Ом; L = 0,0526 Гн). Инерция машины J = 168 870
кг.м 2 , что соответствует постоянной инерции H = 3 с.
электрическая частота равна ω с = 2*π*60 = 377 рад/с. У машины два
пар полюсов так, что его синхронная скорость равна 2*π*60/2 = 188,5 рад/с или 1800 об/мин.
Опция Load Flow
Powergui использовался для инициализации машины для запуска симуляции.
в установившемся режиме с машиной мощностью 500 МВт. Требуемый внутренний
напряжение, вычисленное потоком нагрузки, составляет 1,0149 о.е. Следовательно, внутренний
напряжение E = 315e3*1,0149= 319 690 В среднеквадратичное между фазами.
в блоке Constant, подключенном к входу E. Максимальная мощность
которое может выдать машина с напряжением на клеммах В t =
1,0 pu и внутреннее напряжение E = 1,0149 pu is P max =
V t *E/X = 1,0149/0,2 = 5,0745 о.е.
Коэффициент демпфирования Kd регулируется для получения коэффициента демпфирования
ζ = 0,3. Требуемое значение Kd:
Kd=4ζωsHPmax/2=64,3
Два блока Фурье измеряют угол степени δ. Этот угол вычисляется как
разность между фазовым углом внутреннего напряжения фазы А и фазовым углом фазы А
напряжение на клеммах.
В этом примере выполняется шаг механической мощности
прикладываются к валу. Машина изначально работает в установившемся режиме
с механической мощностью 505 МВт (механическая мощность, необходимая для
выходная электрическая мощность 500 МВт с учетом резистивных потерь).
При t = 0,5 с механическая мощность резко возрастает до 1000 МВт.
Запустите пример и наблюдайте за электромеханическим переходным процессом
в блоке Scope, отображающем угол мощности δ в градусах,
скорость машины в об/мин и электрическая мощность в МВт.
При начальной электрической мощности Pe = 500 МВт (0,5 о.е.) нагрузка
угол δ составляет 5,65 градуса, что соответствует ожидаемому значению:
Pe=VtEsinδX=1,0⋅1,0149⋅sin(5,65∘)0,2=0,5 о.е.
По мере увеличения механической мощности от 0,5 до 1,0 о.е.
угол нагрузки увеличивается и проходит серию недозатухающих колебаний
(коэффициент демпфирования ζ = 0,3) перед стабилизацией до нового значения
11,3 градуса. Частота колебаний определяется выражением:
fn=12πωsPmax2H=2,84 Гц.
См. также
Система возбуждения, гидравлическая турбина и регулятор, powergui, паровая турбина и регулятор, синхронная машина SI
Фундаментальная синхронная машина
Фундаментальная синхронная машина
Стандарт
История версий
Представлен до R2006a
Вы щелкнули ссылку, соответствующую этой команде MATLAB:
Запустите команду, введя ее в командном окне MATLAB.
