

Содержание
Следящий привод, применение магнитных и тиристорных усилителей
Страница 31 из 59
ПОНЯТИЕ О СЛЕДЯЩЕМ ПРИВОДЕ И ПРОГРАММНОМ УПРАВЛЕНИИ
Следящим приводом называется устройство, при помощи которого исполнительный орган с определенной точностью воспроизводит движение рабочего механизма, задаваемое управляющим органом.
Следящий привод состоит из датчика, приемного (следящего) устройства, усилителя и исполнительного органа — приводного двигателя. Элементы следящего привода связаны между собой так, что изменение в положении датчика воздействует через приемник и усилитель на приводной двигатель, который отрабатывает заданную величину перемещения. Таким образом, следящий привод работает только за счет возникновения угла рассогласования между осями датчика и приводного двигателя, и процесс работы сводится только к автоматическому устранению этого рассогласования.
Системы программного управления электроприводами автоматически, без вмешательства человека, выполняют операции по заранее заданной программе.
По принципу действия программные системы аналогичны действию следящих систем. Отличительной чертой является то, что в программном управлении сигнал датчика изменяется по заранее заданной программе, в то время, как в следящих системах изменение сигнала не является заранее предопределенным, а является величиной случайной.
В простейших случаях программа работы привода может быть задана положением переключателя, путевыми выключателями, программными реле времени, перфорированной картой и магнитной лентой с записью программы. Примерами приводов, работающих по программе, могут служить системы автоматического управления поточными линиями послеуборочной обработки зерна, схемы управления машинами кормоцехов. Здесь необходимая последовательность работы машины в соответствии с требованиями технологического процесса создается комбинацией положений переключателей, размещаемых на пультах управления.
Управление приводами в птичниках, свинарниках (кормораздатчики, навозоуборочные транспортеры) осуществляется в функции времени.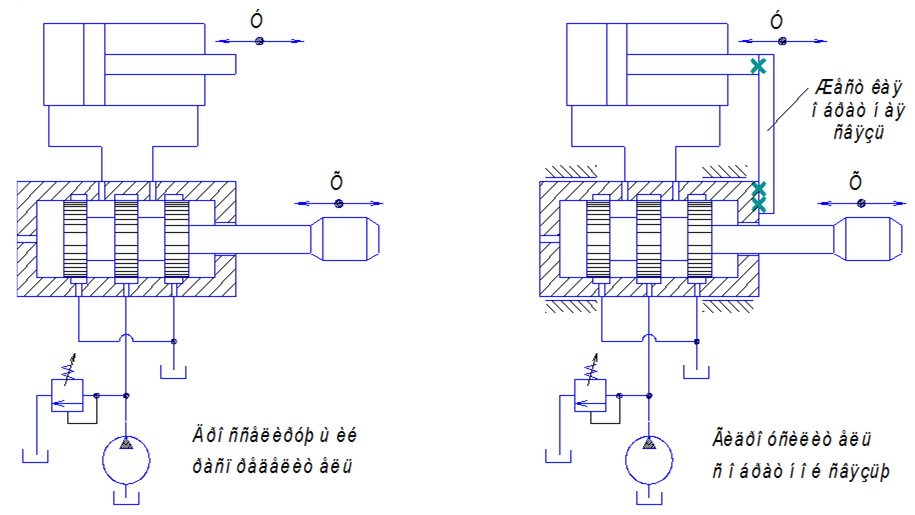 Необходимые импульсы на включение и отключение двигателей подаются времязадающими механизмами с суточной программой.
Необходимые импульсы на включение и отключение двигателей подаются времязадающими механизмами с суточной программой.
ПРИМЕНЕНИЕ МАГНИТНЫХ И ТИРИСТОРНЫХ УСИЛИТЕЛЕЙ В РЕГУЛИРУЕМОМ ЭЛЕКТРОПРИВОДЕ
Широкому внедрению электроприводов с магнитными усилителями и тиристорными преобразователями способствует ряд их достоинств, связанных с отсутствием подвижных механических узлов, возможностью более плавного изменения выходных параметров преобразователя и экономичностью регулирования частоты вращения в более широких пределах.
Схемы управления асинхронными двигателями с магнитными усилителями особенно широко используются в регулируемых приводах с вентиляторной нагрузкой.
Магнитные усилители также применяют в системах управления двигателями постоянного тока (серийный привод типа ПМУ). Обладая широким диапазоном регулирования, как и система генератор — двигатель, привод с магнитными усилителями значительно дешевле, имеет меньшие габариты и лучший к. п. д. На рисунке 13.13 показана простейшая схема тиристорного управления электроприводом постоянного тока небольшой мощности.
п. д. На рисунке 13.13 показана простейшая схема тиристорного управления электроприводом постоянного тока небольшой мощности.
Электродвигатель постоянного тока независимого возбуждения получает питание от сети однофазного переменного тока через управляемый выпрямитель, созданный по мостовой схеме с двумя тиристорами VI, V2 и диодами V3, V4.
Регулирование частоты вращения привода осуществляется изменением среднего выпрямленного напряжения, подводимого к якорю двигателя. Выпрямленное напряжение регулируется путем изменения момента включения тиристора i, считая от начала полупериода (рис. 13.13,6).
(13.7)
где Е — среднее за период напряжение питания.
Из формулы (13.7) видно, что, изменяя момент замыкания отдо ts=0, можно изменить среднее напряжение на
нагрузке от 0 до максимального, равного
В процессе плавного регулирования изменится ширина усеченной полусинусоиды напряжения, а также момент ts или угол и фаза, поэтому данный режим называют еще широтно-импульсной модуляцией или фазовым управлением, обычно реализуемым быстродействующим магнитным усилителем (МУ) с прямоугольной петлей гистерезиса.
Меняя ток управления МУ, можно изменить время, на которое задерживается импульс управления тиристорами от начала полуволны напряжения, и регулировать угол запаздывания отпирания тиристоров выпрямителя.
Магнитный усилитель имеет три обмотки управления: задающую, напряжения и токовую.
Задающая питается от потенциометра R5, положения движков которого задают значение и знак тока управления, и следовательно, и частоту вращения двигателя.
Обмотка напряжения и токовая используются для создания отрицательной обратной связи по напряжению и положительной обратной связи по току.
При этом обмотка напряжения подключается к якорю двигателя через резистор R3, а токовая к обмотке дополнительных полюсов ДП — через резистор R4.
Рис. 13.13. Схема тиристорного управления электроприводом постоянного тока.
При таком включении ток в обмотке напряжения пропорционален напряжению на якоре, а в токовой обмотке — току якоря. Рассматриваемая схема обеспечивает диапазон регулирования частоты вращения двигателя
(10. .. 16): 1; при изменении нагрузки от 25 до 100% изменение скорости не превышает 10%-
.. 16): 1; при изменении нагрузки от 25 до 100% изменение скорости не превышает 10%-
Статические тиристорные преобразователи частоты, разработанные в последние годы, позволяют выполнить самое экономичное регулирование скорости асинхронных электродвигателей с короткозамкнутым ротором. В перспективе тиристорный электропривод займет одно из ведущих мест в системах регулируемого электропривода из-за высокой надежности и большого диапазона регулирования.
- Назад
- Вперёд
Следящий привод — Технарь
Следящий привод СП (рис. 19) состоит из двигателя Д (гидравлического, электрического) необходимой мощности, усилителя мощности УМ, снабжающего этот двигатель энергией, регулируемой в широких пределах, датчика обратной связи по положению ДОС, преобразующего фактическое положение Х2 (или угол поворота) рабочего органа Р0 в электрический сигнал ЕО.С. строго пропорциональный этому положению, и сравнивающего устройства УС, которое сравнивает сигнал ДОС с входным управляющим сигналом ЕВХ (или Х1). При неравенстве этих сигналов, т. е. фактического положения Х2 с заданным Х1 сигнал ошибки е заставляет вращаться двигатель со скоростью Ω, пропорциональной этому сигналу в достаточно широких пределах. Обратная связь по скорости, осуществляемая тахогенератором ТГ, обеспечивает точность управления, снижая зону нечувствительности и влияние различного типа нелинейностей, а также увеличивает жесткость механической характеристики привода.
При неравенстве этих сигналов, т. е. фактического положения Х2 с заданным Х1 сигнал ошибки е заставляет вращаться двигатель со скоростью Ω, пропорциональной этому сигналу в достаточно широких пределах. Обратная связь по скорости, осуществляемая тахогенератором ТГ, обеспечивает точность управления, снижая зону нечувствительности и влияние различного типа нелинейностей, а также увеличивает жесткость механической характеристики привода.
Усилитель мощности и сравнивающее устройство содержат корректирующие звенья, которые служат для обеспечения необходимых динамических свойств привода. Мощные усилители, в качестве которых чаще всего используют управляемые тиристорные преобразователи переменного тока в постоянный (в случае применения электродвигателей) или золотниковые устройства того или иного типа (в случае применения гидродвигателей), как правило, содержат в своем составе маломощный усилитель постоянного тока (УПТ) с большим коэффициентом усиления по напряжению, через который замыкается обратная связь по скорости.
Привод подач является одним из основных узлов, определяющих производительность и точность станков с ЧПУ. Система ЧПУ позволяет практически безынерционно сформировать сигналы управления приводом, обеспечивающие движение по заданной координате. Все большее значение приобретает совершенствование параметров исполнительного двигателя и схемы управления им с учетом кинематической цепи привода. В станочных СП наибольшее применение нашли электродвигатели постоянного тока и гидравлические двигатели (двигатели переменного тока в СП станков пока находят ограниченное применение). Частота вращения электродвигателей постоянного тока обычно не превышает 3000 об/мин при напряжении 220 В. Недостатком их является наличие щеток и коллектора, служащих для подвода рабочего тока в обмотку якоря. Электродвигатели серии ПБСТ содержат встроенный тахогенератор с большим числом коллекторных пластин (96), что снижает пульсации напряжения на малых скоростях.
Для электродвигателей постоянного тока характерна высокая линейность внешних регулировочных характеристик при управлении за счет изменения напряжения на якоре, что обеспечивает постоянный момент на любой скорости в пределах диапазона регулирования. По мере совершенствования устройств ЧПУ, увеличения жесткости и точности узлов станка возрастали требования к величине ускоренных ходов и быстродействию. Скорость ускоренных ходов возросла от 5 м/мин в станках второго поколения до 10—12 м/мин в многооперационных станках третьего поколения. При этом жесткость механических узлов должна допускать ускорения 0,3—0,5 g. Для обеспечения высокой точности обработки величина дискреты уменьшена во многих случаях до 1 мкм.
По мере совершенствования устройств ЧПУ, увеличения жесткости и точности узлов станка возрастали требования к величине ускоренных ходов и быстродействию. Скорость ускоренных ходов возросла от 5 м/мин в станках второго поколения до 10—12 м/мин в многооперационных станках третьего поколения. При этом жесткость механических узлов должна допускать ускорения 0,3—0,5 g. Для обеспечения высокой точности обработки величина дискреты уменьшена во многих случаях до 1 мкм.
Разработаны несколько модификаций электродвигателей постоянного тока: малоинерционные электродвигатели типа ПГ с якорем малого диаметра, но большой длины, высокомоментные тихоходные электродвигатели с постоянными магнитами без обмоток возбуждения, двигатели с плоским печатным якорем и т. д.
Малоинерционные электродвигатели с тиристорными преобразователями обладают высокими скоростями. Этот электродвигатель имеет высокое быстродействие, но требует установки беззазорного редуктора и настройки усиления применительно к параметрам каждого станка, имеет малый диаметр и отсюда малую перегрузочную способность, малую теплоемкость. Поэтому малоинерцнонные электродвигатели постоянного тока заменены низкооборотными электродвигателями, имеющими высокие моменты инерции.
Поэтому малоинерцнонные электродвигатели постоянного тока заменены низкооборотными электродвигателями, имеющими высокие моменты инерции.
Метки: гидравлический двигательзолотниковые устройствакорректирующие звеньямалоинерционные электродвигателималоинерционные электродвигатели постоянного токамалоинерционные электродвигатели с тиристорными преобразователямиСледящий приводстанки с ЧПУтиристорный преобразовательусилитель мощностиусилитель постоянного токаэлектрический двигательэлектродвигатели постоянного токаэлектродвигатель серии ПБСТэлектродвигатель типа ПГ
сервоприводов | Аллен-Брэдли
Управления движением
Многоосевое управление
Чтобы конкурировать на промышленном рынке завтрашнего дня, ваши процессы должны быть гибкими и оптимизированными для повышения производительности. Эти диски помогут вам справиться с этими проблемами. Выберите из широкого спектра конфигураций, чтобы повысить производительность вашего оборудования, предоставляя при этом важные производственные данные, которые способствуют достижению ваших целей в области интеллектуального производства. Ваши многоосевые процессы могут быть сложными, но ваше решение по движению не обязательно должно быть таким. Легко интегрируйте эти приводы с контроллерами Logix и другими устройствами, чтобы упростить архитектуру управления и расширить возможности машины.
Эти диски помогут вам справиться с этими проблемами. Выберите из широкого спектра конфигураций, чтобы повысить производительность вашего оборудования, предоставляя при этом важные производственные данные, которые способствуют достижению ваших целей в области интеллектуального производства. Ваши многоосевые процессы могут быть сложными, но ваше решение по движению не обязательно должно быть таким. Легко интегрируйте эти приводы с контроллерами Logix и другими устройствами, чтобы упростить архитектуру управления и расширить возможности машины.
Управление одной осью
Расширьте возможности своих новых или модернизированных машин с помощью сервоприводов, позволяющих максимально эффективно использовать одноосевые процессы. Благодаря широкому диапазону вариантов питания и инновационных функций эти накопители могут обеспечить производительность и возможности для самых разных приложений.
Автономный блок управления
Для полного раскрытия потенциала ваших производственных машин требуется оптимизированное управление. Наши автономные сервоприводы снижают сложность оборудования и ускоряют окупаемость, предлагая необходимый уровень контроля. От приложений с низким энергопотреблением до более традиционных сервоприводов — эти приводы повышают производительность движения и улучшают результаты производства.
Наши автономные сервоприводы снижают сложность оборудования и ускоряют окупаемость, предлагая необходимый уровень контроля. От приложений с низким энергопотреблением до более традиционных сервоприводов — эти приводы повышают производительность движения и улучшают результаты производства.
сервоприводов | Сервоприводы с импульсным и непрерывным режимом работы
Сервоприводы Control Techniques обеспечивают высокую производительность в сочетании с максимальной гибкостью. Приводы могут подключаться к широкому спектру контроллеров движения через ввод-вывод или выделенные сети связи, такие как EtherCAT, EtherNet/IP и PROFINET . В качестве альтернативы эти приводы могут использовать встроенный контроллер движения для управления системой автоматизации.
Для оптимизации производительности Control Techniques 9Сервоприводы 0119 и серводвигатели сегментированы по режиму работы, необходимому для применения:
Сервоприводы импульсного режима — Digitax HD
- Высокодинамичные приложения , требующие резких ускорений и торможений.
 Примеры включают подъемно-транспортное оборудование, летучие ножницы и другие машины для поперечной резки. Эти приложения характеризуются высоким пиковым значением (например, перегрузка 300 %) и умеренным среднеквадратичным крутящим моментом.
Примеры включают подъемно-транспортное оборудование, летучие ножницы и другие машины для поперечной резки. Эти приложения характеризуются высоким пиковым значением (например, перегрузка 300 %) и умеренным среднеквадратичным крутящим моментом.
 Примеры включают подъемно-транспортное оборудование, летучие ножницы и другие машины для поперечной резки. Эти приложения характеризуются высоким пиковым значением (например, перегрузка 300 %) и умеренным среднеквадратичным крутящим моментом.
Примеры включают подъемно-транспортное оборудование, летучие ножницы и другие машины для поперечной резки. Эти приложения характеризуются высоким пиковым значением (например, перегрузка 300 %) и умеренным среднеквадратичным крутящим моментом.Сервоприводы непрерывного действия — Unidrive M700
- Высокая точность в течение длительного времени, требующая меньших скоростей ускорения и замедления. Примеры включают печать, намотку и маркировку. Эти приложения характеризуются умеренным пиковым и высоким среднеквадратичным крутящим моментом.
Базовый сервопривод Digitax HD M751
Базовый сервопривод Digitax HD M751 предлагает гибкую конфигурацию с двумя слотами для опций для расширения функциональности и настройки. Благодаря встроенной связи RS485 M751 также оснащен встроенным усовершенствованным контроллером движения для распределенного управления движением по 1,5 осям.
Узнать больше
Digitax HD M750 Ethernet
Digitax HD M750 Ethernet — это сетевой сервопривод для централизованных и децентрализованных систем управления движением. Благодаря дополнительному модулю SI-Ethernet, обеспечивающему поддержку Ethernet в реальном времени, включая RTMoE (движение в реальном времени через Ethernet), привод также содержит встроенный усовершенствованный контроллер движения для распределенного управления движением по 1,5 осям.
Благодаря дополнительному модулю SI-Ethernet, обеспечивающему поддержку Ethernet в реальном времени, включая RTMoE (движение в реальном времени через Ethernet), привод также содержит встроенный усовершенствованный контроллер движения для распределенного управления движением по 1,5 осям.
Узнать больше
Digitax HD M751 plus MCi210 Machine Control
Digitax HD M751 plus MCi210 Machine Control — это интеллектуальный сервопривод для децентрализованных систем управления движением. Предлагая возможность полного автономного управления машиной, устраняя необходимость во внешнем контроллере, один привод с MCi210 может управлять несколькими осями.
Узнать больше
Digitax HD M753 EtherCAT
Digitax HD M753 EtherCAT оснащен встроенным 2-портовым коммутатором EtherCAT для простой интеграции в приложения централизованного управления движением. Поддержка EoE (Ethernet через EtherCAT) позволяет подключаться к компьютеру для ввода в эксплуатацию и мониторинга по сети EtherCAT.
