

Содержание
ᐉ Принцип поворота колесных машин
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении.
В зависимости от конструктивных особенностей колесных машин различают три способа поворота:
- при помощи поворота управляемых колес одной, нескольких или всех осей
- созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
- взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т.е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами:
а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
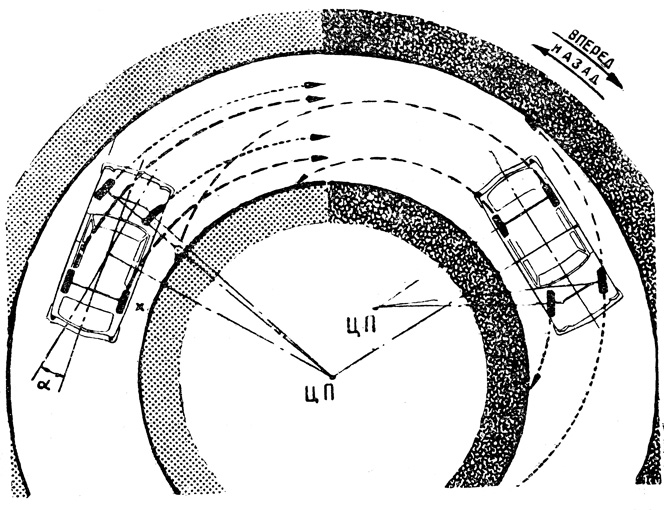
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Поворот ТС «по-гусеничному» принципу
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1 (внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
Шарнирносочлененные схемы поворота ТС для инженерных тягачей
Инжирные тягачи обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.
Posted in Рулевое управлениеTagged Рулевое управление
ᐉ Способы поворота и принцип работы рулевого управления тракторов и автомобилей
Управляемость машины это способность ее двигаться точно по задаваемой траектории при условии минимальных физических и психологических нагрузок на водителя. Понятие управляемости включает в себя свойства курсовой устойчивости (способность изменять направление движения по заданной траектории при соответствующем воздействии на орган управления).
Понятие управляемости включает в себя свойства курсовой устойчивости (способность изменять направление движения по заданной траектории при соответствующем воздействии на орган управления).
Существуют следующие способы поворота колесных тракторов и автомобилей:
- поворот всех колес или только передних управляемых
- излом шарнирно-сочлененной рамы машины
- создание разности вращающих моментов на ведущих колесах
- бортовой способ поворота по принципу гусеничных машин
- комбинированный способ, сочетающий первый и третий способы поворота
Автомобили и большинство тракторов поворачивают, изменяя направление движения передних колес, а тракторы Т-150К, К-701 — в результате поворота одной части рамы относительно другой вокруг соединяющего их вертикального шарнира.
Рулевое управление классифицируют по следующим признакам:
- по расположению на машине — с левым или правым расположением
- по конструкции рулевого механизма — червячные, реечные, кривошипно-винтовые, комбинированные и др.

- по конструктивным особенностям рулевого привода — привод к управляемым колесам и управляемым осям или к складывающимся полурамам
Рулевое управление должно быть легким и удобным, для чего усилие на рулевом колесе и угол его поворота должны быть ограниченными. Кроме того, необходимо, чтобы рулевое управление обеспечивало правильную кинематику поворота и безопасность движения, а поворот колес происходил так, чтобы их качение не вызывало проскальзывания. Это обеспечивается соединением рулевого управления в форме трапеции.
К рулевому управлению предъявляют следующие требования:
- Обеспечение высокой маневренности, при которой возможны крутые и быстрые повороты на сравнительно ограниченных площадях.
- Легкость управления, оцениваемая усилием, прилагаемым к рулевому колесу.
- Высокая степень надежности действия, поскольку выход рулевого управления из строя в большинстве случаев заканчивается аварией или катастрофой.
- Правильная кинематика поворота, при которой колеса всех осей автомобиля катятся по концентрическим окружностям (невыполнение этого требования приводит к скольжению шин по дороге, интенсивному их изнашиванию, излишним расходам мощности двигателя и топлива).
- Умеренное ощущение толчков на рулевом колесе при езде по плохим дорогам, что снижает безопасность движения.
- Точность следящего действия, в первую очередь кинематического, при котором любому заданному положению рулевого колеса будет соответствовать вполне определенная заранее рассчитанная крутизна поворота.
- Отсутствие в рулевом управлении больших зазоров, приводящих к плохому держанию автомобилем дороги, к его вилянию.
Рулевое управление машины с передними управляемыми колесами состоит из переднего моста, трапеции управления, рулевого привода и рулевого механизма (рисунок а). Передние колеса устанавливают на цапфах 13, соединенных с передней осью шкворнями. Все это образует передний мост.
Рисунок. Схемы рулевого управления и установки передних колес: а — схема рулевого управления: 1 — гидроусилитель; 2 — рулевое колесо; 3 — рулевая колонка; 4 — вал рулевого механизма; 5 — карданная передача; 6 — винт гидроусилителя; 7 — поршень-рейка; 8 — зубчатый сектор; 9 — стойки; 10- вал сошки; 11 — поворотный рычаг; 12 — поперечная тяга; 13 — поворотная цапфа; 14 — передняя ось; 15 — рулевая сошка; б — развал колес и поперечный наклон шкворня; в — продольный наклон шкворня; г — схождение колес
На цапфах закреплены рычаги 11, связанные шарнирно с поперечными тягами 12, Рычаги 11 и поперечные тяги 12 с передней осью 14 составляют трапецию управления, предназначенную для поворота колес.
Тяги 22 соединены с рулевой сошкой 15, сидящей на валу 10 с закрепленным на нем зубчатым сектором 8. Рулевая сошка и вал 10 образуют рулевой привод, передающий усилие от сошки к поворотным цапфам.
Зубчатый сектор 8 находится в зацеплении с поршнем-рейкой 7, укрепленной на винте 6 гидроусилителя, и образует рулевой механизм. Действие рулевого механизма облегчается гидравлическим усилителем. Усилие к рулевому механизму передается от рулевого колеса 2, сидящего на валу 4, через карданную передачу 5 на винт 6.
В рулевых механизмах применяют передачи типа червяк ролик, червяк — сектор, червяк — червячная шестерня и др. Передачи первого типа наиболее распространены в рулевых механизмах тракторов и грузовых автомобилей.
На отечественных автомобилях принято левое (по ходу) рулевое управление, обеспечивающее лучший обзор. У тракторов рулевое управление расположено справа, благодаря чему создаются условия для лучшего наблюдения за работой агрегата и более точного его вождения при выполнении ряда технологических операций (пахота, косьба и т. д.).
д.).
С целью облегчения управления трактором или автомобилем применяют усилители рулевого управления преимущественно гидравлического типа (в тракторах К-701, Т-150К, МТЗ-80, ЛТЗ-55, в автомобиле ЗИЛ-130).
Управляемые (направляющие) колеса трактора (автомобиля) должны быть установлены правильно, чтобы износы шин и затраты мощности на качение были наименьшими, устойчивость — хорошей, а управление — легким. Установка управляемых (передних) колес характеризуется их развалом в вертикальной плоскости и схождением в горизонтальной, а также наклоном шкворней поворотных цапф в продольной и поперечной плоскостях.
Развал колес (рисунок б) определяется установкой цапф колес с наклоном их шипов вниз. Это позволяет уменьшить нагрузки на внешний подшипник и улучшить управляемость. Угол развала колес различных машин а < 2°.
Схождение колес (рисунок г) находят по разнице размеров А и Б между серединами колес впереди и сзади, если смотреть на них сверху. Схождение колес обеспечивает правильное параллельное качение их при наличии развала и зазоров в шкворнях, рулевых тягах и подшипниках колес. В руководстве по каждой машине указывают требуемые размеры А и Б, которые проверяют специальными приспособлениями и регулируют, изменяя длину поперечной тяги рулевого управления. Схождение колес находится в пределах 2…12 мм.
Схождение колес обеспечивает правильное параллельное качение их при наличии развала и зазоров в шкворнях, рулевых тягах и подшипниках колес. В руководстве по каждой машине указывают требуемые размеры А и Б, которые проверяют специальными приспособлениями и регулируют, изменяя длину поперечной тяги рулевого управления. Схождение колес находится в пределах 2…12 мм.
Поперечный в (рисунок б) и продольный у (рисунок в) наклоны шкворня способствуют повышению устойчивости колеса в среднем положении. Угол у, характеризующий поперечный наклон шкворня, составляет у автомобилей 6…8° и определяется соответствующей формой передней оси. Угол у, характеризующий продольный наклон шкворня, изменяется в пределах 0…40 и определяется установкой цапфы передней оси в наклонном положении. Углы наклона шкворней в процессе эксплуатации машин регулировкам не подлежат.
Как переставить шины | Mobil™
By Wayne Scraba, www.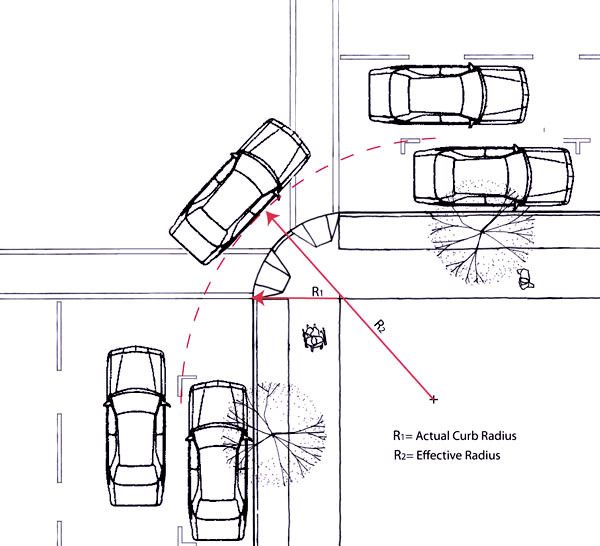 automedia.com
automedia.com
Вращающиеся шины важны (и всегда были) для обслуживания автомобиля. Если вы вращаете соответствующие колеса и шины на данной оси, износ шин будет равномерным. Результатом почти всегда является сбалансированное сцепление с дорогой и управляемость в течение определенного периода времени. Большинство гарантий на шины требуют, чтобы шины менялись по определенному графику пробега. И многие производители шин рекомендуют замену на расстоянии от 3000 до 5000 миль.
Балансировка шин
Использование каждой шины в как можно большем числе положений колес автомобиля делает возможным выравнивание износа шин. Естественно, это не может компенсировать износ шин, вызванный износом или неисправностью механических компонентов или неправильным накачиванием. При рассмотрении механики автомобиля имейте в виду, что передняя часть часто имеет более сложную задачу, чем задняя. Например, в переднеприводном автомобиле шины отвечают за рулевое управление, остановку, движение вверх и вниз и, конечно же, за тягу автомобиля вперед. В высокопроизводительном заднеприводном автомобиле вы, вероятно, обнаружите, что задние шины выдерживают больше нагрузки, чем передние. Автомобили «четыре на четыре» и полноприводные модели привносят на вечеринку свои особенности износа шин. Вывод: независимо от того, какой это автомобиль или грузовик, положение колес может вызывать различные степени и типы износа шины.
В высокопроизводительном заднеприводном автомобиле вы, вероятно, обнаружите, что задние шины выдерживают больше нагрузки, чем передние. Автомобили «четыре на четыре» и полноприводные модели привносят на вечеринку свои особенности износа шин. Вывод: независимо от того, какой это автомобиль или грузовик, положение колес может вызывать различные степени и типы износа шины.
Замена четырех шин вместо двух
По мере износа шины глубина протектора уменьшается. Если все четыре шины изнашиваются более или менее одновременно, вы можете заменить сразу четыре шины. Это на самом деле выгодно по сравнению с заменой шин парами просто потому, что у вас всегда будет одинаковая свежая резина на всех четырех углах. Кроме того, вы должны учитывать, что производители постоянно выпускают новые и улучшенные конфигурации шин. В результате ваши старые шины могут устареть к тому времени, когда они изнашиваются. Если вы замените только две шины одновременно, есть большая вероятность, что вы получите смешанную технологию шин, которая может негативно повлиять на вождение вашего автомобиля.
Схема вращения шин
Пока все хорошо, но вращение шин уже не то, что было несколько десятилетий назад. Давным-давно у большинства автомобилей были одинаковые колеса и шины на всех четырех колесах, а запаска также была полноразмерной, подходящей к опорным колесам. Сегодня сложно найти такую комбинацию: запасные части для экономии места, запасные шины, установленные на специальных стальных колесах (остальной подвижной состав на алюминиевых колесах), различные вылеты и размеры передних и задних колес, разные размеры шин и т. д. . Из-за этого процесс вращения отличается. Вот некоторые из множества различных вариантов схемы вращения шин.
Четыре шины одинакового размера, ненаправленные
Если шины ненаправленные, а шины и колеса одного размера, чаще всего используются три различных схемы вращения четырех шин:
- Передний привод : Поверните шины в перекрестном порядке. Это означает, что левая передняя часть идет к левой задней, а правая передняя — к правой задней. Левая задняя часть идет к правой передней, а правая задняя — к левой передней.
- Задний привод или полный привод/полный привод: Левая задняя часть переходит в правую переднюю. Правая задняя часть переходит в левую переднюю. Правая передняя часть переходит в левую заднюю. Левая передняя часть переходит в правую заднюю.
- (Альтернативный вариант) Задний привод или полный привод/полный привод: Левая задняя часть переходит в левую переднюю. Правая задняя часть переходит в правую переднюю. Левая передняя часть переходит в правую заднюю. Правая передняя часть переходит в левую заднюю.
 Левая задняя часть идет к правой передней, а правая задняя — к левой передней.
Левая задняя часть идет к правой передней, а правая задняя — к левой передней.Направленные шины разных размеров или разные вылеты
Что делать, если рассматриваемое транспортное средство имеет разнонаправленные колеса и шины или оснащено колесами с разным вылетом (колесным зазором) спереди и сзади? В этом случае шины обязательно потребуют демонтажа, повторного монтажа и повторной балансировки, чтобы повернуть шины.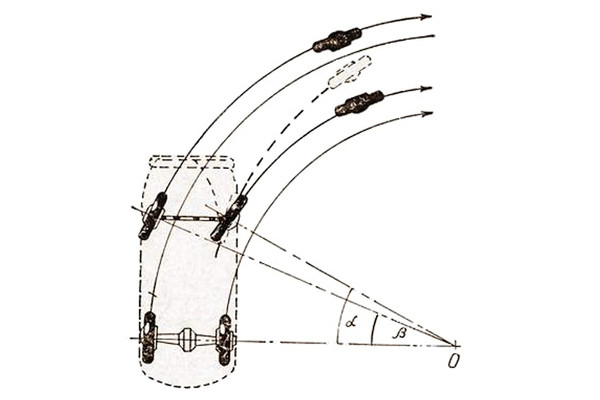 Ниже приведены четыре других типичных схемы вращения:
Ниже приведены четыре других типичных схемы вращения:
- Направленные колеса и шины одного размера: Левая передняя часть идет к левой задней. Левая задняя часть переходит в левую переднюю. Правая передняя часть переходит в правую заднюю. Правая задняя часть переходит в правую переднюю.
- Направленные шины разного размера с колесами разного размера: Шины необходимо демонтировать и снова установить на соответствующее колесо/направление вращения.
- Ненаправленные колеса и шины разных размеров спереди и сзади: Левая передняя часть идет к правой передней. Правая передняя часть переходит в левую переднюю. Левая задняя часть переходит в правую заднюю. И правое заднее переходит в левое заднее.
- Замена пяти колес: В прошлом году замена пяти колес была возможна просто потому, что запаска была полноразмерной. Сегодня такое редко бывает. Даже многие легкие грузовики оснащены запасными колесами, не соответствующими комбинации ведущих колес. Если, однако, запаска соответствует ведущим колесам и шинам, и все шины имеют одинаковый размер и не являются направленными, то вы можете выполнить поворот пять шин/колес следующим образом:
 Если, однако, запаска соответствует ведущим колесам и шинам, и все шины имеют одинаковый размер и не являются направленными, то вы можете выполнить поворот пять шин/колес следующим образом:
Если, однако, запаска соответствует ведущим колесам и шинам, и все шины имеют одинаковый размер и не являются направленными, то вы можете выполнить поворот пять шин/колес следующим образом:
Передний привод : Левый передний переходит в левый задний. Левая задняя часть переходит в правую переднюю. Правая задняя часть переходит в левую переднюю. Запаска идет сзади справа. Правая передняя уходит на запаску.
Задний или полный привод: Левая задняя часть переходит в левую переднюю. Левая передняя уходит на запаску. Запаска идет сзади справа. Правая задняя часть переходит в правую переднюю. Правая передняя часть переходит в левую заднюю.
Идея состоит в том, чтобы распределить износ пяти шин на протяжении всего срока их службы. Это особенно важно для многих полноприводных автомобилей, поскольку теоретически все шины, включая запасные, изнашиваются одинаково.
Перестановка шин 101 — Выравнивание, балансировка и перестановка шин
Главная страница > Компания > Безопасность шин > Техническое обслуживание шин > Перестановка шин
Равномерный износ протектора и срок службы шин
Даже если ваш автомобиль правильно выровнен, шины все равно необходимо переставлять для оптимального износа и технического обслуживания. Вращение противодействует неравномерному износу каждого положения колеса на автомобиле. Как часто вы должны это делать? Чтобы максимально продлить срок службы протектора шин, следуйте рекомендованному графику замены, указанному в руководстве по эксплуатации вашего автомобиля. Если нет рекомендаций от производителя транспортного средства, меняйте шины каждые 5000–7000 миль, отвозя свой автомобиль к надежному дилеру шин или в автомобильный сервисный центр.
Вращение противодействует неравномерному износу каждого положения колеса на автомобиле. Как часто вы должны это делать? Чтобы максимально продлить срок службы протектора шин, следуйте рекомендованному графику замены, указанному в руководстве по эксплуатации вашего автомобиля. Если нет рекомендаций от производителя транспортного средства, меняйте шины каждые 5000–7000 миль, отвозя свой автомобиль к надежному дилеру шин или в автомобильный сервисный центр.
Поддерживайте правильное выравнивание
Если колеса вашего автомобиля не выровнены, ваши шины будут изнашиваться неравномерно, что может привести к преждевременной замене шин. Кроме того, несоосность автомобиля может сигнализировать о других механических проблемах, которые могут повлиять на работу шин. Для достижения наилучших результатов выберите магазин, в котором используются точные станки с компьютерным управлением, и попросите распечатку углов регулировки, чтобы сохранить их в своих сервисных записях.
Проверьте свой баланс
Неотбалансированные шины и колеса не только вызывают раздражающую вибрацию. Это также может привести к неравномерному износу протектора, что еще больше снизит комфорт при езде и приведет к более ранней замене шин. Магазин с электронным балансировщиком вращения может помочь сгладить ситуацию.
Переднеприводные и заднеприводные автомобили
Автомобили с передним приводом передают тормозные, рулевые и движущие силы на шины передней оси. На шины задней оси в первую очередь воздействуют тормозные силы, что приводит к гораздо более быстрому износу шин передней оси.
Модифицированное поперечное вращение
«Модифицированный поперечный рисунок» можно выполнять на любом передне- или заднеприводном автомобиле, оснащенном четырьмя ненаправленными шинами (направленные шины следует переставлять только спереди назад). Шины свободного качения перекрещиваются и устанавливаются на ведущую ось, а шины ведущего моста подводятся прямо к свободно вращающейся оси (без пересечения). Просто помните, «крест, чтобы ехать».
Шины свободного качения перекрещиваются и устанавливаются на ведущую ось, а шины ведущего моста подводятся прямо к свободно вращающейся оси (без пересечения). Просто помните, «крест, чтобы ехать».
Направленные протекторы предназначены для работы только в направлении, указанном на боковине шины. Их всегда нужно поворачивать спереди назад — независимо от того, на каком транспортном средстве они установлены — чтобы направление вращения не менялось.
Посмотрите наше видео Tread Life, чтобы увидеть больше шаблонов вращения.
Примечания:
После перестановки отрегулируйте все шины до рекомендуемого производителем транспортного средства давления накачки. Всегда затягивайте зажимные гайки или зажимные болты в соответствии с рекомендациями производителя.
Полноприводный автомобиль
Транспортные средства, оснащенные постоянным полным приводом, а также автомобили с полным приводом «по команде» и приводимые в основном в режиме полного привода, лучше всего подходят для четырехколесного поперечного вращения. При такой схеме шины обеих осей перекрещиваются и устанавливаются на противоположную ось.
При такой схеме шины обеих осей перекрещиваются и устанавливаются на противоположную ось.
Прямое вращение
Прямое вращение было разработано в первые годы существования радиальных шин. Этот метод вращения переключает шины спереди назад, но не из стороны в сторону. Этот метод вращения используется для направленных рисунков протектора.
Вращение с пятью шинами
Если ваша запасная шина представляет собой подходящую полноразмерную шину (в отличие от временной), и вы хотите оставить ее в рабочем состоянии, передвиньте запаску в правое заднее положение. Затем поместите шину, которая должна была уйти в правую заднюю часть, в запасное положение.
Вращение с шестью шинами (два грузовика)
Если ваш автомобиль имеет сдвоенные задние колеса, схема вращения выглядит как два треугольника, один со стороны водителя и один со стороны пассажира.

 Каждое управляемое колесо установлено на поворотной цапфе 13 (рис.), соединенной с балкой 11 моста шкворнем 8. Шкворень неподвижно закреплен в балке, и его верхний и нижний концы входят в проушины поворотной цапфы. При повороте цапфы за рычаг 7 она вместе с установленным на ней управляемым колесом поворачивается вокруг шкворня. Поворотные цапфы соединены между собой рычагами 9 и 12 и поперечной тягой 10, Поэтому управляемые колеса поворачиваются одновременно.
Каждое управляемое колесо установлено на поворотной цапфе 13 (рис.), соединенной с балкой 11 моста шкворнем 8. Шкворень неподвижно закреплен в балке, и его верхний и нижний концы входят в проушины поворотной цапфы. При повороте цапфы за рычаг 7 она вместе с установленным на ней управляемым колесом поворачивается вокруг шкворня. Поворотные цапфы соединены между собой рычагами 9 и 12 и поперечной тягой 10, Поэтому управляемые колеса поворачиваются одновременно.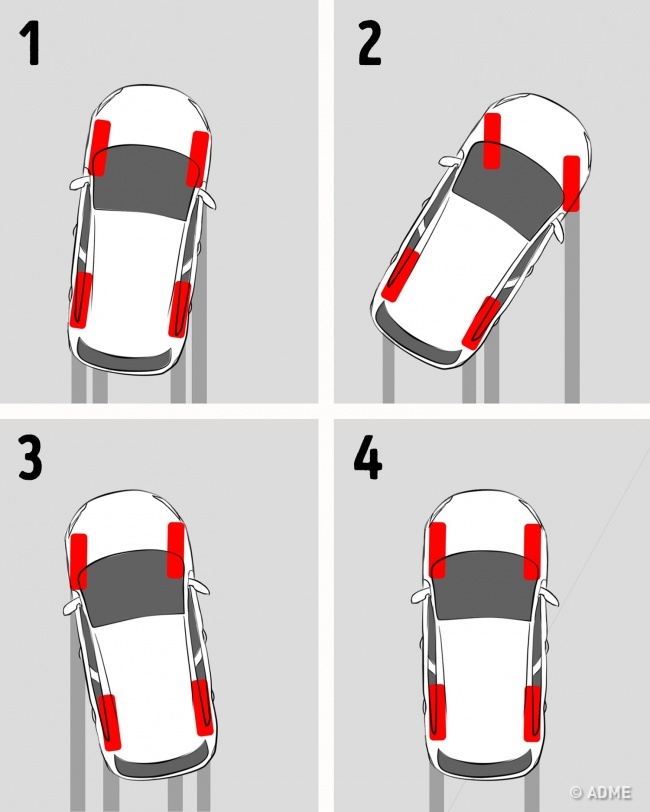 Сошка 5, продольная тяга 6,рычаги 7, 9 и 12 поворотных цапф и поперечная тяга 10 составляют рулевой привод, передающий усилие от сошки к поворотным цапфам обоих управляемых колес.Поперечная тяга 10, рычаги 9 и 12 образуют рулевую трапецию, обеспечивающую необходимое соотношение между углами поворота управляемых колес.
Сошка 5, продольная тяга 6,рычаги 7, 9 и 12 поворотных цапф и поперечная тяга 10 составляют рулевой привод, передающий усилие от сошки к поворотным цапфам обоих управляемых колес.Поперечная тяга 10, рычаги 9 и 12 образуют рулевую трапецию, обеспечивающую необходимое соотношение между углами поворота управляемых колес.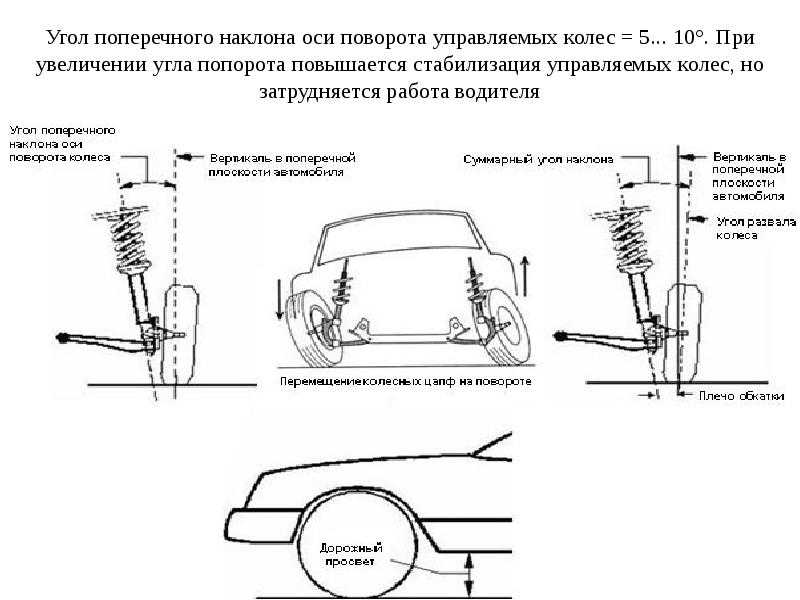 е. менять свое значение в процессе поворота колеса. У легковых автомобилей передаточное число рулевого механизма им составляет 12 — 20, а у грузовых автомобилей 15 — 25. Передаточное число рулевого привода зависит от отношения плеч рычага поворотной цапфы и рулевой сошки. При повороте управляемых колес вследствие изменения наклона этих рычагов передаточное число ип рулевого привода изменяется в среднем от 0,85 до 1,1.
е. менять свое значение в процессе поворота колеса. У легковых автомобилей передаточное число рулевого механизма им составляет 12 — 20, а у грузовых автомобилей 15 — 25. Передаточное число рулевого привода зависит от отношения плеч рычага поворотной цапфы и рулевой сошки. При повороте управляемых колес вследствие изменения наклона этих рычагов передаточное число ип рулевого привода изменяется в среднем от 0,85 до 1,1. п.), управляемые колеса должны обладать способностью сохранять положение, соответствующее прямолинейному движению, и возвращаться в него из любого другого положения. Эта способность называется стабилизацией управляемых колес. Стабилизация обеспечивается наклонами шкворня в поперечной и продольной плоскостях и упругими свойствами пневматической шины.
п.), управляемые колеса должны обладать способностью сохранять положение, соответствующее прямолинейному движению, и возвращаться в него из любого другого положения. Эта способность называется стабилизацией управляемых колес. Стабилизация обеспечивается наклонами шкворня в поперечной и продольной плоскостях и упругими свойствами пневматической шины. На стабилизирующий момент, возникающий вследствие поперечного наклона шкворня, не влияют скорость движения и качество дороги. Часто стабилизирующий момент от наклона шкворня вбок называют весовым стабилизирующим моментом. Угол аш наклона шкворня вбок на отечественных автомобилях составляет 6 — 10°. Поперечный наклон шкворня уменьшает плечо С (плечо обкатки), снижая передачу ударных нагрузок, действующих на рулевое управление от дороги.
На стабилизирующий момент, возникающий вследствие поперечного наклона шкворня, не влияют скорость движения и качество дороги. Часто стабилизирующий момент от наклона шкворня вбок называют весовым стабилизирующим моментом. Угол аш наклона шкворня вбок на отечественных автомобилях составляет 6 — 10°. Поперечный наклон шкворня уменьшает плечо С (плечо обкатки), снижая передачу ударных нагрузок, действующих на рулевое управление от дороги. и R2, действуя на плече а, созданном в результате наклона шкворня назад, стремятся возвратить управляемые колеса в положение, соответствующее прямолинейному движению. Стабилизирующий момент, действующий на управляемые колеса, в результате наклона шкворней в продольной плоскости пропорционален квадрату скорости и называется скоростным стабилизирующим моментом. Угол у наклона шкворня в продольной плоскости равен 1—4°.
и R2, действуя на плече а, созданном в результате наклона шкворня назад, стремятся возвратить управляемые колеса в положение, соответствующее прямолинейному движению. Стабилизирующий момент, действующий на управляемые колеса, в результате наклона шкворней в продольной плоскости пропорционален квадрату скорости и называется скоростным стабилизирующим моментом. Угол у наклона шкворня в продольной плоскости равен 1—4°. И с тех пор каждый уважающий себя владелец BMW считал своим долгом написать мне в какую-нибудь соц сеть и спросить: за сколько денег я готов сделать аналогичное на его авто.
И с тех пор каждый уважающий себя владелец BMW считал своим долгом написать мне в какую-нибудь соц сеть и спросить: за сколько денег я готов сделать аналогичное на его авто. Для демонстрации схему собрал на коленке, чтобы показать как оно работает.
Для демонстрации схему собрал на коленке, чтобы показать как оно работает. Также можно со старшего выхода второго регистра подключить и вход данных третьего регистра. И так практически бесконечно.
Также можно со старшего выхода второго регистра подключить и вход данных третьего регистра. И так практически бесконечно. Схема может сама мигать, пока присутствует напряжение питания. Для этого вместо светодиода D8 следует подключить транзистор. Транзистор Q1 будет сбрасывать выходы сдвигового регистра после полного заполнения. В данном режиме рекомендую использовать переменный резистор RV1 с сопротивлением 100кОм.
Схема может сама мигать, пока присутствует напряжение питания. Для этого вместо светодиода D8 следует подключить транзистор. Транзистор Q1 будет сбрасывать выходы сдвигового регистра после полного заполнения. В данном режиме рекомендую использовать переменный резистор RV1 с сопротивлением 100кОм.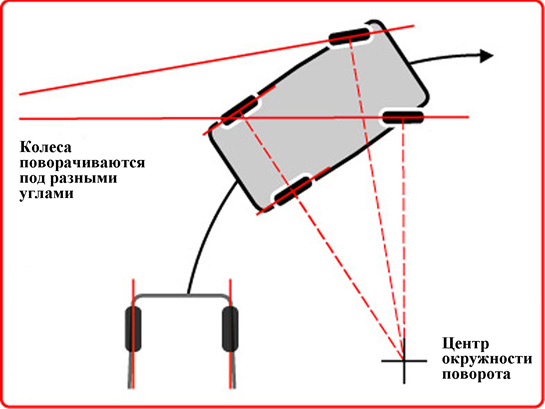 Старайтесь избегать дорог в часы пик. Если вы едете по незнакомой местности, попросите кого-нибудь (возможно, одного из ваших пассажиров) помочь вам с направлением и всегда имейте при себе карту местности. Если вы едете в одиночку, всегда сворачивайте с дороги в безопасном месте и останавливайте автомобиль, прежде чем смотреть на карту.
Старайтесь избегать дорог в часы пик. Если вы едете по незнакомой местности, попросите кого-нибудь (возможно, одного из ваших пассажиров) помочь вам с направлением и всегда имейте при себе карту местности. Если вы едете в одиночку, всегда сворачивайте с дороги в безопасном месте и останавливайте автомобиль, прежде чем смотреть на карту. Пройдите дальше на перекресток перед началом поворота и отрегулируйте свое положение в полосе движения, чтобы увеличить радиус поворота.
Пройдите дальше на перекресток перед началом поворота и отрегулируйте свое положение в полосе движения, чтобы увеличить радиус поворота.

 Вам нужно будет оставаться снаружи поворота, чтобы задние колеса не задевали бордюр и не падали с тротуара.
Вам нужно будет оставаться снаружи поворота, чтобы задние колеса не задевали бордюр и не падали с тротуара.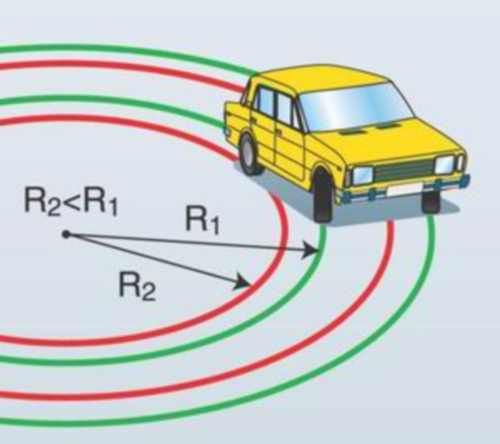 Если знак запрещает трейлеры, не пользуйтесь этой дорогой. Впереди могут быть такие препятствия, как камни, низкие деревья или размытые участки дороги, с которыми может безопасно справиться только полноприводный автомобиль.
Если знак запрещает трейлеры, не пользуйтесь этой дорогой. Впереди могут быть такие препятствия, как камни, низкие деревья или размытые участки дороги, с которыми может безопасно справиться только полноприводный автомобиль. Если все четыре шины изнашиваются более или менее одновременно, вы можете заменить сразу четыре шины. Это на самом деле выгодно по сравнению с заменой шин парами просто потому, что у вас всегда будет одинаковая свежая резина на всех четырех углах. Кроме того, вы должны учитывать, что производители постоянно выпускают новые и улучшенные конфигурации шин. В результате ваши старые шины могут устареть к тому времени, когда они изнашиваются. Если вы замените только две шины одновременно, есть большая вероятность, что вы получите смешанную технологию шин, которая может негативно повлиять на вождение вашего автомобиля.
Если все четыре шины изнашиваются более или менее одновременно, вы можете заменить сразу четыре шины. Это на самом деле выгодно по сравнению с заменой шин парами просто потому, что у вас всегда будет одинаковая свежая резина на всех четырех углах. Кроме того, вы должны учитывать, что производители постоянно выпускают новые и улучшенные конфигурации шин. В результате ваши старые шины могут устареть к тому времени, когда они изнашиваются. Если вы замените только две шины одновременно, есть большая вероятность, что вы получите смешанную технологию шин, которая может негативно повлиять на вождение вашего автомобиля.

