Содержание
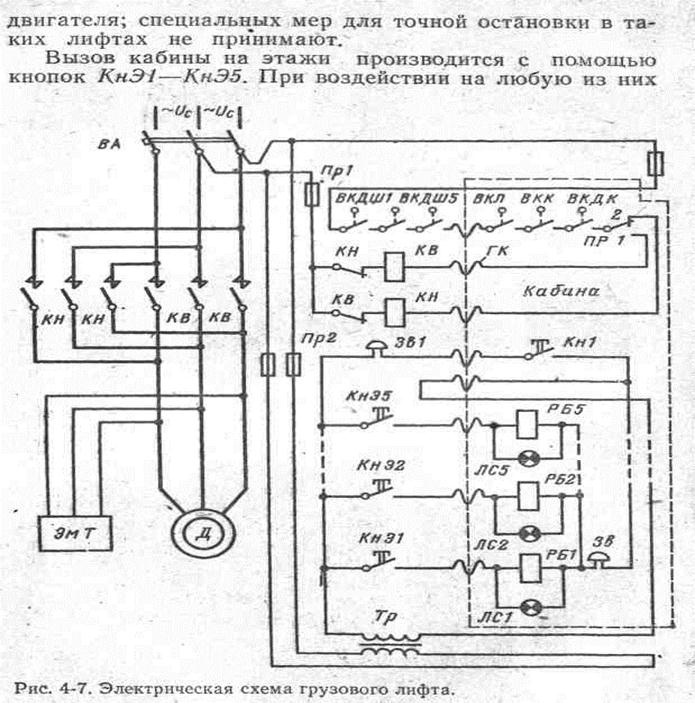
Электрические схемы грузовых подъемников
Электрические схемы грузовых подъемников
Все грузовые строительные подъемники рассчитаны на питание от внешней электросети трехфазного переменного тока с частотой 50 Гц и напряжением 380/220 В. Сеть должна иметь нулевой глухозаземленный провод. При междуфазовом напряжении 380 В двигатели подъемника соединяются в звезду и подключаются на это напряжение. Цепи управления, освещения, сигнализаций, а также катушки тормозных электромагнитов подключаются на напряжение 220 В между фазовым и нулевым проводами. При междуфазовом напряжении 220 В обмотки двигателей соединяются в треугольник, а все электрические цепи подъемника подключаются на междуфазовое напряжение 220 В.
Рис. 70. Электрические схемы грузовых строительных подъемников: а — принципиальная схема подъемника С-598А, 6 — цепи сигнализации подъемников ТП-9 и ТП-12
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Принципиальная электрическая схема подъемника С-598А при питании его от сети с междуфазовым напряжением 380 В показана на рис. 70, а.
70, а.
Подъемник включается в сеть через трехполюсный автоматический выключатель В, имеющий электромагнитный расиепитель для дистанционного управления этим выключателем. Катушка расцепителя включена в цепь дистанционного управления подъемником через самовозвратную размыкающую кнопку КнЗ. При нажатии на кнопку К&З цепь управления катушки В прерывается и силовые контакты выключателя размыкаются. Этой кнопкой пользуются при аварийной ситуации или в других случаях, когда подъемник нужно быстро отключить от внешней сети.
Пуск, остановку и изменение направления движения грузонесущего органа выполняют с помощью самовозвратных кнопок управления Кн1 и Кн2. Через них поступает напряжение в соответствующие катушки магнитных пускателей К1 и К2. Чтобы предотвратить одновременное включение обоих магнитных пускателей, цепи их катушек включены через размыкающие блок-контакты К1 и К2. При нажатии на кнопку Кн1 замыкаются силовые контакты пускателя Kl и одновременно размыкается блок-контакт К1 и этим предохраняется от включения катушка магнитного пускателя К2.
При нажатии на кнопку Кн2 подается напряжение в катушку магнитного пускателя К2, срабатывает его электромагнитная система. При этом замыкаются главные контакты К2 в силовой цепи двигателей и одновременно размыкается блок-контакт К.2, находящийся в цепи катушки пускателя К.1, что предохраняет ее от включения при случайном нажатии на кнопку Knl.
В электрические цепи управления магнитными пускателями К1 и К2 введены соответствующие конечные выключатели Вк1 и Вк2, которые прерывают цепи катушек этих пускателей при подъеме или опускании грузонесущего органа подъемника до заданных крайних пределов. При достижении крайнего верхнего предела грузо-несущий орган, механически воздействуя на конечный выключатель Вк1, размыкает его контакты и цепь катушки К1 прерывается. Главные контакты пускателя /С/, размыкаясь, выключают двигатели. При достижении грузонесущим органом подъемника крайнего нижнего положения таким же образом срабатывает конечный выключатель Вк2.
Рис. 71. Принципиальная электрическая схема подъемника С-953.1
Принципиальная электрическая схема подъемника С-953.1
Для дистанционного управления подъемником кнопки Кн1, Кн2, КнЗ и кнопка Кн4, включающая сирену Зв, смонтированы на переносной кнопочной станции. Она соединена гибким многожильным кабелем с электрошкафом подъемника, в котором установлены автоматический выключатель,’ магнитные пускатели и электрическая сирена.
В кожухе переносной кнопочной станции расположен блокировочный контакт Бк, включающий цепь управления только с помощью ключа. Машинист подъемника вставляет ключ в соответствующую замочную скважину на время управления подъемником. Это сделано для того, чтобы посторонние лица не могли включить подъемник.
Принципиальные электрические схемы подъемников ТП-9 и ТП-12 отличаются от схемы подъемника С-598А только тем, что в них предусмотрена возможность подключения в цепь сигнализации (рис. 70, б) дополнительных кнопок. Их устанавливают на местах разгрузки грузовой платформы, чтобы подавать оттуда звуковые сигналы машинисту подъемника.
Принципиальная электрическая схема подъемника С-953.1 (рис. 71) отличается от схем подъемников С-598А, ТП-9 и ТП-12 тем, что в ней есть дополнительный магнитный пускатель К1 для дистанционного отключения силовой цепи этого подъемника от питающей электрической сети при аварийных ситуациях.
Рис. 72. Принципиальная электрическая схема подъемника ЖК-40
Силовую цепь отключают нажатием на самовозвратную размыкающую кнопку Кн1. Включают подъемник в сеть, нажимая на самовозвратную замыкающую кнопку Кн2. Параллельно с кнопкой Кн2 включен блок-контакт пускателя К1, который замыкается при срабатывании магнитной системы этого пускателя и продолжает оставаться замкнутым при освобождении кнопки Кн2. Таким образом, катушка пускателя К1 остается под током, а главные контакты этого пускателя замкнутыми.
Автоматический выключатель В в схеме этого подъемника служит для защиты от коротких замыканий, предохранения двигателя от перегрузок и для ручного отключения подъемника от питающей сети при длительных перерывах в работе..png)
Принципиальная электрическая схема подъемника ЖК-40 (рис. 72) отличается увеличенным количеством конечных (путевых) выключателей и значительным числом рабочих контактов в них. Это объясняется тем, что электродвигатель грузоподъемной лебедки на подъемнике используется и в качестве монтажного двигателя для приведения шарнирной мачты подъемника из транспортного положения в рабочее и обратно.
Конечный выключатель В1 срабатывает в конце раскрытия (выпрямления) мачты и тем самым фиксирует ее рабочее положение. Конечные выключатели В2, ВЗ и В5, действуя совместно и в определенной последовательности, обеспечивают остановку грузовой платформы в крайнем верхнем положении при работе подъемника, предотвращают складывание мачты, если грузовая платформа не находится в крайнем нижнем положении, а также не позволяют включать грузоподъемную лебедку во время складывания и раскладывания мачты.
Рис. 73. Принципиальная электрическая схема подъемника С-953
Конечный выключатель В4 входит в конструкцию ограничителя грузоподъемности. Он выключает цепь управления, если на грузовой платформе подъемника находится груз, превышающий по массе номинальную грузоподъемность этого подъемника.
Он выключает цепь управления, если на грузовой платформе подъемника находится груз, превышающий по массе номинальную грузоподъемность этого подъемника.
В качестве привода тормоза лебедки в этом подъемнике применен однофазный электромагнит переменного тока Эм вместо электрогидравлических толкателей, применяемых в схемах ранее рассмотренных подъемников.
Существенный недостаток электрической схемы подъемника ЖК-40 в том, что его нельзя дистанционно отключить от внешней электросети при аварийных ситуациях, кроме того, на подъемнике нет электрических- аппаратов для звуковой сигнализации.
Принципиальная электрическая схема подъемника С-953 (рис.73) в отличие от описанных имеет приводной механизм для подачи груза в оконный проем. Этот механизм приводится в действие электродвигателем МЗ.
На подъемнике две кнопочные станции управления: одной из них пользуется машинист с земли, второй — с места разгрузки на этажах здания; она закреплена на грузонесущем органе подъемника. С помощью выключателя В4 машинист мОжет передать управление на верхнюю кнопочную станцию, а при необходимости может ее и отключить снизу, вернув управление к себе. Обе кнопочные станции имеют ручные блок-контакты БК1 и БК2, замыкаемые специальными ключами. С обеих кнопочных станций подъемник можно дистанционно отключить от внешней сети, например при аварийных ситуациях. Эти функции выполняют кнопки Кн1 или Кн2 с помощью магнитного пускателя.
С помощью выключателя В4 машинист мОжет передать управление на верхнюю кнопочную станцию, а при необходимости может ее и отключить снизу, вернув управление к себе. Обе кнопочные станции имеют ручные блок-контакты БК1 и БК2, замыкаемые специальными ключами. С обеих кнопочных станций подъемник можно дистанционно отключить от внешней сети, например при аварийных ситуациях. Эти функции выполняют кнопки Кн1 или Кн2 с помощью магнитного пускателя.
Уровни подъема и опускания грузонесущего органа ограничены конечными выключателями В6 и В7, действие которых распространяется на обе кнопочные станции. Благодаря примененной системе блокировки одновременное управление подъемником с двух кнопочных станций исключено.
Механизм подачи груза в оконный проем не имеет конечных выключателей, поэтому грузовую каретку нельзя доводить до ее крайних положений.
Двигатели защищены от перегрузок, а вся электрическая часть от токов коротких замыканий автоматическим выключателем В1. Двигатель МЗ отключается трехполюсным выключателем В2, а цепи управления — двухполюсным ВЗ.
Тормоз грузовой лебедки и ее электродвигателя Ml приводится в действие электрогидравлическим толкателем с двигателем М2, а тормоз механизма подачи груза по горизонтали — электромагнитом ЭМ1, встроенным в корпус этого механизма.
Принципиальные электрические схемы силовой цепи и цепей управления подъемника ТП-14 приведены на рис. 74, а—е. Подъемник получает энергию от четырехпроводной трехфазной сети с глухозаземленной нейтралью напряжением 380/220 В, частотой 50 Гц. Напряжение цепей управлений 220 В.
От перегрузок и токов короткого замыкания электрооборудование защищено комбинированными расцепителями автоматических выключателей ВА1 и ВА2 и предохранителем Пр.
Машинист управляет работой двигателя главного подъема Ml с наземного переносного пульта управления. Вертикальным и горизонтальным перемещением грузовой клети, т. е. двигателями М2 и МЗ,,управляет рабочий, находящийся на этаже, с помощью четырехкнопочного поста управления, который укреплен на поворотном кронштейне грузовой клети.
Сирены звуковой сигнализации установлены одна в наземном электроаппаратном шкафу, а другая — в шкафу каретки. Сирены включаются кнопкой Кн5 на наземном пульте или кнопкой Кн4, находящейся на поворотном кронштейне клети.
Электрическая схема, кроме силовой части и цепей ручного управления электродвигателями, содержит адресователь (на рис. 74 не показан). Это устройство автоматически останавливает грузовую каретку на уровне заданного этажа при ее движении вверх. В системе адресования использован бесконтактный конечный выключатель КВД-100. Он установлен на каретке грузонесущего органа, а металлические пластины, взаимодействующие с ним, смонтированы на мачте подъемника на уровне требующихся остановок грузонесущего органа при его подъеме на этажи.
Рис. 74. Принципиальная электрическая схема подъемника ТП-14з а— силовая цепь, б, в — цепи управления
Технологический режим (рабочий или монтажный) перемещения грузонесущего органа устанавливают с помощью универсального выключателя ВУ1.
В рабочем режиме главный двигатель M1 пускают нажатием кнопок Кн1 Вверх или Кн2 Вниз, расположенных на переносном наземном пульте управления. Точная остановка каретки обеспечивается с помощью переключателя ВУ2. В автоматическом режиме управления каретка останавливается при движении вверх т— на любом, заранее выбранном этаже; при движении вниз — только на уровне нижней погрузочной площадки (при воздействии на конечный выключатель ВК4). В ручном режиме управления каретку можно остановить как при движении ее вверх, так и при движении вниз. Для этого поступают следующим образом. После того как каретка пройдет уровень предшествующего этажа, нажимают кнопку Кнб Ручной останов на уровне этажей и держат ее нажатой, пока каретка не остановится. Для мгновенной аварийной остановки каретки как при движении вверх, так и при движении вниз нажимают кнопку КнЗ Стоп на пульте управления.
В монтажном режиме грузонесущий орган перемещается по мачте подъемника до тех пор, пока оператор держит нажатой соответствующую кнопку Кн1 Вверх или Кн2 Вниз. Система адресования при этом не работает.
Система адресования при этом не работает.
Перемещение рабочего органа вдоль мачты, подъем клети, а также перемещения грузонесущего органа вдоль мачты блокируются с помощью конечных выключателей ВК1, ВК2, ВКЗ, ВК4, ВК5 и ВК6, которые включены в соответствующие цепи управления двигателями M1, M2 и МЗ.
Принципиальная электрическая схема подъемника ПГП-27-500 (рис. 75) отличается от-схем других подъемников в связи с тем, что ПГП-27-500 в процессе работы перемещается по рельсовому пути вдоль здания. Этот подъемник имеет четыре основных механизма: механизм перемещения подъемника с приводом от электродвигателя M1, грузовую лебедку с приводом от электродвигателя М2 для перемещения грузовой каретки вдоль мачты, механизм перемещения тележки с приводом от электродвигателя М3 для передвижения ее к зданию (от здания) и механизм подъема и опускания грузовой клети относительно тележки, который приводится в движение от двигателя М4. Все эти механизмы имеют тормоза с электромагнитным приводом.
Подъемник включается в трехфазную четырехпроводную сеть через главный автоматический выключатель В А с тепловой и силовой защитой. Каждый электродвигатель предохраняется от перегрузки самостоятельным выключателем ВА1, ВА2, ВАЗ или ВА4. Цепи управления защищены автэм этическим выключателем ВА5. От сети подъемник отключается дистанционно магнитным пускателем К с помощью кнопок Кн1 и Кн2, включается кнопкой Кп4. Механизмом передвижения подъемника вдоль здания управляют с помощью кнопок Кн5 и Кнб. Чтобы поднять или опустить каретку вдоль мачты, нажимают соответственно кнопки Кн7 или Кн8. Грузовую тележку перемещают к зданию и от него с помощью кнопок Кн9 и КнЮ. Все.эти кнопки установлены на нижней переносной кнопочной станции машиниста. Там же находится кнопка Кн14 звукового сигнала. Кнопки Кн11 и Кн12 служат для управления подъемом и опусканием грузовой клети относительно выдвижного монорельса, они находятся на отдельной кнопочной станции, которая закреплена на клети. Этими кнопками пользуются рабочие, которые загружают и разгружают клеть подъемника.
Рис. 75. Принципиальная электрическая схема подъемника ПГП-27-500:.
а — силовой цепи, б — цепи управления
Перемещение подъемника вдоль рельсового пути ограничивается конечными выключателями ВК1 и ВК2, грузонесущего органа вдоль мачты во время работы — конечными выключателями ВКА и ВК5, а во время монтажа-—выключателем ВКЗ при включенном В1, о чем сигнализирует контрольная лампа К2. Конечные выключатели ВК6 и BK1 ограничивают перемещение тележки к зданию и от него, а конечный выключатель ВК9 блокирует включение двигателя М2 при нахождении выдвижного монорельса в оконном проеме. Конечный выключатель ВК8 ограничивает подъем клети, выключая в нужный момент двигатель М4.
Выключатель BKW, являясь составной частью ограничителя грузоподъемности, отключает двигатель М2 при перегрузке подъемника свыше его номинальной грузоподъемности.
Принципиальная электрическая схема грузового бетоноподъемника БП-0,5 (см. рис.67) в основном рассмотрена в § 36. Пульт управления подъемником, имеющий кнопки Подъем, Спуск и Стоп, устанавливают в цокольном этаже строящегося здания. В комплект подъемника входит местная телефонная связь, с помощью которой машинист может разговаривать с рабочими, занимающимися погрузкой бетона в ковш на земле, и с рабочими, принимающими бетон на этажах строящегося здания. Кратковременно нажимая на кнопку Подъем, машинист включает наименьшую скорость подъема ковша.
В комплект подъемника входит местная телефонная связь, с помощью которой машинист может разговаривать с рабочими, занимающимися погрузкой бетона в ковш на земле, и с рабочими, принимающими бетон на этажах строящегося здания. Кратковременно нажимая на кнопку Подъем, машинист включает наименьшую скорость подъема ковша.
Через 1—2 с скорость начинает . автоматически ступенчато увеличиваться до максимального значения за счет последовательного срабатывания реле времени и соответствующей пускорегулирующей аппаратуры. Клеть с ковшом автоматически останавливается по достижении заданного этажа. Задание на остановку клети дает рабочий, принимающий бетон на этом этаже. Для этого рабочий включает приемное устройство, на которое воздействует упор, находящийся на клети подъемника. Для спуска разгруженного ковша машинист подъемника кратковременно нажимает на кнопку Спуск после сигнала, полученного по телефону от рабочего, принявшего бетон. У земли клеть с ковшом останавливается для его новой загрузки автоматически с помощью нижнего конечного выключателя.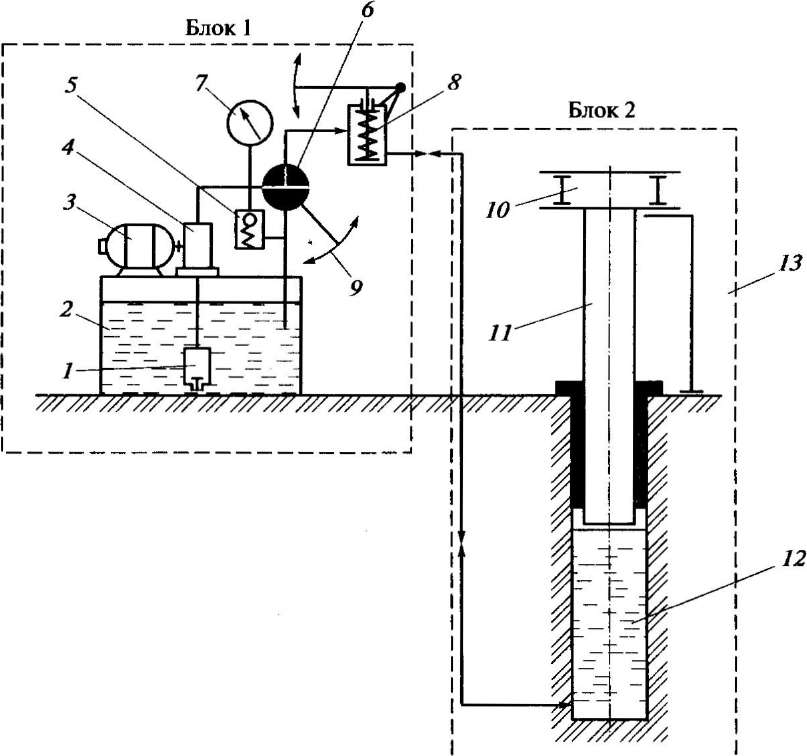
В экстренных случаях машинист останавливает поднимающийся или опускающийся ковш в любом месте его пути, нажав на кнопку Стоп. Для продолжения прерванного движения ковша вниз машинист повторно нажимает кнопку Спуск. При прерванном движении ковша вверх повторно нажимает кнопку Подъем.
Подъемник БП-0,5 имеет ограничитель грузоподъемности, который с помощью встроенного в него выключателя прерывает цепь управления на подъем, если в ковше подъемника масса бетона превышает его грузоподъемность. После уменьшения количества бетона в ковше повторно нажимают кнопку Подъем и ковш поднимается с постепенным автоматическим увеличением скорости.
Лабораторная работа 8. Гидравлическая схема подъемника
Цель
работы: Изучение схемы подъемника.
Настройка и наладка отдельных элементов.
Когда
на рабочий цилиндра (рис.2.8.) постоянно
действует нагрузка (например, постоянно
подвешенный груз), то гидроцилиндр
необходимо предохранить от опускания
из-за утечки в распределителе. Это
Это
достигается с помощью установленного
в сливной магистрали обратного клапана
1 с деблокировкой
(гидрозамка).
Кроме
того, необходимо установить клапан
противодавления (клапан подключения
давления
2) . Давление
открытия этого клапана примерно на
10% выше веса
удерживаемого груза. При этом возникает
эффект гидравлической противодействующей
силы. И только после подачи давления в
поршневую полость гидроцилиндра,
одновременно подается давление в линию
управления гидрозамка. Это обеспечивает
его открытие и слив жидкости. В данной
схеме необходимо использовать
распределитель, обеспечивающий разгрузку
линии управления при удержании груза.
Контрольные вопросы:
Назначение отдельных
элементов гидросистемы.Работа гидросистемы
при подъеме груза.Работа гидросистемы
при опускании груза.Работа элементов
гидросистемы при удержании груза.
Отметьте особенности
используемых клапанов давления в данной
схеме.Нарисуйте развернутую
схему предохранительного клапана.Нарисуйте на схеме
фильтры, установленные в различных
линиях.Объясните особенности
используемого гидравлического замка
в данной схеме.

.
Рис.
2.8. Гидропривод подъемника
Лабораторная
работа 9.
Гидравлическая
система синхронного хода нескольких
гидроцилиндров с помощью так называемого
«гидравлического боуденовского
троса
«
Цель
работы: Изучение особенностей работы
гидросистемы с использованием одновременно
работающих гидроцилиндров.
Одним из распространенных способов
синхронизации хода гидравлических
цилиндров является так называемый
«гидравлический боуденовский трос».
Правда,
применение боуденовского троса связано
с определенными затратами (дополнительные
датчики и т.п.).
Два
гидроцилиндра (рис.2.9.) одинаковых
размеров со сплошными поршневыми
штоками последовательно подключаются
друг к другу. Благодаря этому второй
цилиндр повторяет движение первого
цилиндра, на который подается давление
насоса. Поскольку обе последовательно
включенные полости цилиндров столб
жидкости только перемещают, ход цилиндров
вследствие внутренних, а возможно и
внешних утечек, без подпитки может
измениться.
Во
избежание нежелательных последствий
такого изменения хода поршней полость
«боуденовского троса» с помощью
расположенного справа
4/3-распределителя
2 через каждый
ход соединяется кратковременно с
магистралью подачи насоса или бака.
Неравномерный ход поршня имеет следующие
причины:
а)
левый цилиндр первым возвращается в
верхнее конечное положение и включает
концевой выключатель
3. Причина:
Причина:
недостаток жидкости
между цилиндрами. Способ устранения:
с
помощью левого концевого выключателя
3 включить
магнит а
распределителя
2. Рабочая
жидкость будет поступать в магистраль
управления до тех пор, пока правый
цилиндр также не включит концевой
выключатель. Магнит
а снова отключается.
б)
Правый цилиндр первым возвращается в
верхнее конечное положение и включает
концевой выключатель
4. Причина:
избыток жидкости между
цилиндрами. Способ устранения:
с
помощью правого концевого выключателя
4 включить
магнит b
распределителя
2. Этим открывается
гидравлически деблокируемый обратный
клапан
5 и жидкость
стекает до тех пор, пока левый цилиндр
также не займет конечное положение. С
помощью левого концевого выключателя
3 магнит
b
отключается.
Рис.2.9. Гидравлическая схема с
использованием «боуденовского» троса
В этом случае синхронность хода
поршня зависит не только от количества
жидкости между цилиндрами, но и от
точности исполнения обоих цилиндров.
Общеизвестен тот факт, что в технике
невозможно изготовить две абсолютно
одинаковые детали. Поскольку подпиточный
распределитель
2, как правило,
имеет золотниковую конструкцию, возникает
определенная утечка.
Контрольные вопросы:
Работа данной схемы.
Назначение и возможные
типы используемых концевых выключателей.Особенности применения
в данной схеме гидрозамка.Особенности применения
в данной схеме гидрораспределителей.Нарисуйте развернутую
схему и поясните работу предохранительного
клапана с непрямым управление,
использумого в данной схеме.Нарисуйте развернутую
схему и поясните работу гидравлического
распределителя с непрямым управление,
использумого в данной схеме.
Лабораторная работа
10.
Гидросистема с параллельным включением
распределителей
Цель работы: изучение
работы схемы гидропривода с параллельным
включением распределителей.
На рис. 2.10 представлена гидросистема
с параллельным включением нескольких
распределителей
Насос
1, подача которого
регулируется с помощью регулирующего
двигателя
2, всасывает
отфильтрованную жидкость и подает ее
в соседнюю гидросистему.
Через
магистральные ответвления и распределители
5, 6 и
7 рабочая
жидкость поступает в гидроцилиндры
8, 9 и
10.
Распределители и,
следовательно, потребители, расположены
параллельно.
На
схеме распределители
5 и
6 в нейтральном
положении перекрывают точки подключения
Р, А, В и Т. Когда распределитель
7 находится в
правом положении, точка подключения Р
закрыта.
Клапан
ограничения давления
3 регулирует
давление в гидросистеме перед
распределителями, которого величина
снимается нажатием клавиши 3/2-распределителя
4
на манометру.
В
качестве потребителей на схеме изображены
телескопический гидроцилиндр
двустороннего действия
8, дифференциальный
гидроцилиндр
9 с постоянным
демпфированием поршня и гидроцилиндр
одностороннего действия в возвратной
пружиной
10.
При
параллельном включении нескольких
цилиндров могут двигаться одновременно
лишь в том случае, если имеется достаточное
количество рабочей жидкости, с помощью
которой можно поддержать необходимое
рабочее давление.
В
противном случае давление устанавливается
по минимальному сопротивлению, то
есть вначале выдвигается цилиндр с
минимальным давлением.
Когда
первый цилиндр достиг конечного
положения, давление нарастает,
достигая величины, требуемой для
выдвижения следующего цилиндра.
Выдвижение цилиндров происходит
поочередно в зависимости от давления,
требуемого для преодоления нагрузки.
Контрольные вопросы:
Типы используемых
распределителей в данной схеме.Типы гидроцилиндров.
Работа гидросистемы.
Рис. 2.10. Гидросистема
с параллельно включенными распределителями
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 gif»>
gif»> gif»>
gif»> gif» colspan=»5″>
gif» colspan=»5″> gif» colspan=»5″>
gif» colspan=»5″> gif» colspan=»5″>
gif» colspan=»5″> gif»>
gif»>Динамика полета
пропустить навигацию
Что такое воздухоплавание?
| Динамика полета | Самолеты
| Двигатели | История
полета | Что такое УЭТ?
Словарь | Веселье
и игры | Образовательные ссылки | Урок
Планы | Индекс сайта | Главная
Что такое воздух?
Воздух
это физическое вещество, которое
имеет вес. В нем есть молекулы, которые постоянно движутся. Давление воздуха создается
В нем есть молекулы, которые постоянно движутся. Давление воздуха создается
молекулами, движущимися вокруг. Движущийся воздух обладает силой, которая поднимет воздушных змеев
и воздушные шары вверх и вниз. Воздух представляет собой смесь различных газов; кислород, углерод
диоксид и азот. Всему, что летает, нужен воздух. Воздух имеет силу толкать и
натяните птиц, воздушные шары, воздушных змеев и самолеты.
В 1640 году Евангелиста Торричелли открыла
что воздух имеет
масса.
При экспериментировании
измеряя ртуть, он обнаружил, что воздух оказывает давление на ртуть.
Франческо Лана б/у
это открытие, чтобы начать планировать дирижабль в конце 1600-х годов. Он нарисовал
дирижабль на бумаге, в котором использовалась идея о том, что воздух имеет вес. Корабль был пустым
шар, из которого будет удален воздух. После того, как воздух был удален,
сфера будет иметь меньший вес и сможет взлететь в воздух. Каждый
из четырех сфер прикрепляли к конструкции, похожей на лодку, а затем весь
машина бы плавала. Фактический дизайн никогда не пробовали.
Фактический дизайн никогда не пробовали.
Горячий воздух расширяется и распространяется, и он становится легче холодного
воздух. Когда воздушный шар наполнен горячим воздухом, он поднимается вверх, потому что горячий воздух расширяется.
внутри баллона. Когда горячий воздух остывает и выходит из баллона,
воздушный шар возвращается вниз.
Как крылья поднимают самолет
Крылья самолета имеют такую форму, чтобы воздух двигался быстрее
над верхней частью крыла. Когда воздух движется быстрее, давление воздуха уменьшается.
Таким образом, давление на верхнюю часть крыла меньше, чем на нижнюю часть крыла.
Разность давлений создает на крыле силу,
лифты
крыло в воздух.
Вот простой
компьютерное моделирование
которые вы можете использовать, чтобы изучить, как крылья создают подъемную силу.
Законы движения
Сэр Исаак Ньютон предложил три закона движения в 1665 году.
Законы движения
помогите объяснить как летает самолет.
1. Если объект не движется, он не начнет двигаться сам по себе. Если
объект движется, он не остановится и не изменит направление, если что-то не толкнет
это.2. Объекты будут двигаться дальше и быстрее, если на них надавить сильнее.
3. Когда объект толкают в одном направлении, всегда возникает сопротивление
такого же размера в противоположном направлении.
Силы полета
Четыре силы полета Подъем — вверх |
Управление полетом самолета
Как летает самолет? Давайте представим, что наши руки — это крылья.
Если мы поместим одно крыло вниз и одно крыло вверх, мы можем использовать кувырок.
к
изменить направление
самолета. Мы помогаем поворачивать самолет
рысканием в одну сторону. Если мы поднимем нос, как
пилот может
поднять нос
самолета, мы поднимаем шаг
самолета. Все эти измерения вместе позволяют управлять полетом.
самолета. У пилота самолета есть специальные элементы управления, которые можно использовать для полета
самолет. Есть рычаги и кнопки, которые пилот может нажать, чтобы изменить
рыскание, тангаж и крен самолета.
Кому
рулон
самолет вправо или влево, элероны подняты на один
крыло и опущено на другом. Крыло с опущенным элероном поднимается при этом
крыло с поднятыми элеронами опускается.
Подача
заставляет самолет снижаться или подниматься. Пилот настраивается
лифты на хвосте, чтобы самолет снижался или поднимался. Опускание лифтов
вызвало падение носа самолета, что привело к падению самолета. Повышение
Повышение
лифты заставляют самолет подниматься.
рыскание
это поворот самолета. Когда руль повернут
в одну сторону самолет движется влево или вправо. Нос самолета заострен
в том же направлении, что и направление руля. Руль направления и элероны
используются вместе для поворота
Как пилот управляет самолетом?
Нажмите на дисплей радара , пеленгатор ,
|
Для управления самолетом пилот использует несколько инструментов…
Пилот управляет мощностью двигателя
с помощью дроссельной заслонки. При нажатии на педаль газа увеличивается
мощность, и вытягивание его уменьшает мощность.
элероны
поднять и
опустить крылья. Пилот контролирует крен
самолет, поднимая один или другой элерон штурвалом. Включение
Включение
штурвал по часовой стрелке поднимает правый элерон и опускает левый элерон,
который катит самолет вправо.
л
Изображение самолета в рулоне
руль
работает, чтобы
контролировать рыскание самолета. Пилот перемещает руль направления влево и вправо, при этом левый
и правые педали. Нажатие на правую педаль руля перемещает руль вправо.
Это отклоняет самолет вправо. Используемые вместе,
руль направления и элероны используются для поворота самолета.
Изображение самолета Yaw
лифты
которые
на хвостовой части используются для управления шагом
самолет. Пилот использует штурвал, чтобы поднять
и опустите рули высоты, перемещая их вперед-назад. Опускание лифтов
заставляет нос самолета опускаться и позволяет самолету опускаться. Подняв
лифты пилот может заставить самолет подняться.
Изображение шага плоскости
Пилот самолета нажимает на верхнюю часть педалей руля направления, чтобы использовать тормоза .
Тормоза используются, когда самолет находится на земле, чтобы замедлить самолет и
будьте готовы остановить его. Верхняя часть левого руля управляет левым тормозом.
а верхняя часть правой педали управляет правым тормозом.
Если вы посмотрите на эти движения вместе, вы увидите, что каждый тип движения
помогает контролировать направление и уровень самолета, когда он летит.
Звуковой барьер
Звук состоит из движущихся молекул воздуха. Они толкаются вместе и собираются
вместе, чтобы сформировать
звуковые волны
. Звук
волны распространяются со скоростью около 750 миль в час на уровне моря. Когда летит самолет
в
скорость звука
воздушные волны собираются вместе
и сжимайте воздух перед самолетом, чтобы он не двигался вперед. Этот
Этот
компрессия вызывает
ударная волна
формироваться перед
самолет.
Чтобы лететь быстрее скорости звука, самолет должен быть в состоянии
пробить ударную волну. Когда самолет движется по волнам,
это заставляет звуковые волны распространяться, и это создает громкий шум или звук .
стрела . Звуковой удар вызван внезапным изменением атмосферного давления.
Когда самолет движется быстрее звука, он движется со сверхзвуковой скоростью.
Самолет, летящий со скоростью звука, летит со скоростью
1 Маха
или около 760 миль в час. 2 Маха в два раза больше скорости звука.
Режимы полета
Иногда называют скоростей полета ,
каждый режим — это разный уровень скорости полета.
Гидросамолет | Авиация общего назначения (100-350 Большинство первых самолетов могли летать только на |
Боинг 747 | дозвуковой (350-750 миль в час). Эта категория содержит большинство |
Конкорд | сверхзвуковой 760 миль в час — это скорость звука. Его еще называют MACH 1. Эти самолеты |
Космический корабль | гиперзвуковой Ракеты летят со скоростью в 5-10 раз превышающей скорость звука.  |