Содержание
устройство, схема монтажная с описанием, чертеж
Классификация мостовых кранов
Мостовые ГПМ (грузоподъемные механизмы) имеют широкую классификацию.
Краны общепромышленного назначения оборудуются грузовым крюком. Специальные подъемно-транспортные механизмы комплектуются узкоспециализированным захватом: захват для контейнеров, магнит, грейфер.
Тип опоры крана может быть подвесным или опорным. Подвесными считаются механизмы, подвешенные на краях двутавров, которые в свою очередь закреплены в верхней части здания. Ходовые колеса опираются на внутреннюю часть балки и передвигаются по ним. Опорные краны передвигаются по рельсам, установленных на подкрановых балках, которые также закрепляются в верхней части цеха.
По количеству несущих балок ГПМ разделяются на однобалочные и двухбалочные.
- Однобалочная. Грузоподъемность менее 10 тонн, используется на небольших предприятиях.
- Двухбалочная. Грузоподъемность выше 8 тонн, сфера применения обширна: машиностроение, горнодобывающая промышленность, металлургия.
 Длина пролета может достигать 60 метров. При необходимости возможна установка вспомогательного грузового механизма.
Длина пролета может достигать 60 метров. При необходимости возможна установка вспомогательного грузового механизма.
 Длина пролета может достигать 60 метров. При необходимости возможна установка вспомогательного грузового механизма.
Длина пролета может достигать 60 метров. При необходимости возможна установка вспомогательного грузового механизма.Привод может быть ручным и электрическим.
- Ручной – для работы необходимо привести в движение лебедку.
- Электрические – передвигаются без помощи оператор, функционируют от сети.
Преобладающее большинство составляют мощные краны с электроталью, а также работающие по типу электрической лебедки.
Рис 1. Схема мостового крана
Китайские автокраны
При покупке автокрана технические характеристики машины становятся главным определяющим фактором. Китайская спецтехника, давно подтвердившая свою репутацию надежной, высокопроизводительной и дешевой в обслуживании, выступает лучшей альтернативой дорогим европейским моделям автокранов, а лучшим доказательством ее эффективности могут послужить впечатляющие достижения строительной отрасли Китая.
Наша компания предлагает технику XCMG (XuZhou Construction Machinery Group) – одной из ведущих инженерно-машиностроительных корпораций Поднебесной, являющейся государственным образцовым предприятием категории 863/CIMS. У нас можно купить автокраны XCMG различной грузоподъемности и получить в свое распоряжение технику со всеми разрешительными документами Ростехнадзора и Инструкцией по эксплуатации на русском языке.
Система торможения
Для того, чтобы контролировать процесс подъема и перемещения груза в подвешенном состоянии используется спускной тормоз. В большинстве случаев принципиальная тормозная схема мостового крана грузоподъемностью 10 тонн имеет замкнутую структуру, то есть движение груза блокируется в обычном состоянии, а для перемещения нужно отпустить спускной рычаг.
При возникновении внештатной ситуации (например, обрыв тросов) устройство автоматически останавливает движение крана.
Колодочные тормоза отличаются высокой надежностью. Для удержания перемещаемого груза колодки активируются и блокируют тросовый механизм.
Государственные стандарты
В зависимости от типа мостовых кранов существует несколько нормативных документов, регулирующих их изготовление:
- ГОСТ 27584-88 — содержит общие технические требования к производству мостовых и козловых кранов, их приемке, хранению, транспортировке, режимам работы и т. д.
- ГОСТ на краны мостовые электрические однобалочные опорные №22045-89.
- ГОСТ 25711-83 «Краны мостовые электрические общего назначения грузоподъемностью от 5 до 50 тонн».
- ГОСТ на краны мостовые однобалочные подвесные №7890-93.
Кроме этих основных стандартов, каждый кран должен соответствовать требованиям множества других ГОСТов — по покраске, качеству сварных соединений, твердости металла и т. д.
Электрооборудование на ГПМ
К электрооборудованию для мостовых кранов предъявляются повышенные требования, так как они работают в высокоинтенсивном режиме, постоянно включаясь и выключаясь, разгоняясь и останавливаясь.
К электрическому оборудования для кранов относятся:
- Электродвигатели. Наиболее часто используемыми являются асинхронные трехфазные электрические двигатели. По типу исполнения обмотки ротора они подразделяются на фазовые и с короткозамкнутым контуром. Принцип работы основан на взаимодействии проводники и вращающегося поля. Поле создается на обмотках статора, обмотки ротора служат проводником. Вращение двигателя прямо пропорционально вращению ротора – увеличение частоты ротора уменьшает вращение электромотора.
 Наиболее часто используемыми являются асинхронные трехфазные электрические двигатели. По типу исполнения обмотки ротора они подразделяются на фазовые и с короткозамкнутым контуром. Принцип работы основан на взаимодействии проводники и вращающегося поля. Поле создается на обмотках статора, обмотки ротора служат проводником. Вращение двигателя прямо пропорционально вращению ротора – увеличение частоты ротора уменьшает вращение электромотора.
Наиболее часто используемыми являются асинхронные трехфазные электрические двигатели. По типу исполнения обмотки ротора они подразделяются на фазовые и с короткозамкнутым контуром. Принцип работы основан на взаимодействии проводники и вращающегося поля. Поле создается на обмотках статора, обмотки ротора служат проводником. Вращение двигателя прямо пропорционально вращению ротора – увеличение частоты ротора уменьшает вращение электромотора.Рис. 2. Электрическая схема мостового крана с описанием
- Устройства управления (контролеры, пускатели, реле).
- Защита (выключатели, предохранители).
- Механизмы для тормозной системы.
Также в эту категорию можно причислить вспомогательное электрооборудование: освещение, сигнализация, подогрев кабины оператора.
Питания на кран подается через гибкий электрический кабеля или троллею (для кранов высокой грузоподъемности).
Виды
Водопроводный кран – это один из видов запорной арматуры. Он необходим для контроля и обеспечения водоснабжения. Конструкция крана представлена следующими частями – носиком, вентилями, запорными механизмами (шарами или картриджами) и ручками. Классифицировать эти устройства можно по конструктивному исполнению:
Он необходим для контроля и обеспечения водоснабжения. Конструкция крана представлена следующими частями – носиком, вентилями, запорными механизмами (шарами или картриджами) и ручками. Классифицировать эти устройства можно по конструктивному исполнению:
- Одновентильные;
- Двухвентильные.
Принцип действия одновентильного крана считается очень простым, т. к. он используется для поставки только одного вида воды – либо холодной, либо горячей. Такие механизмы оснащаются специальными буксами, выполненными из керамики или метала. Керамический кран-букса состоит из пары пластин, которые плотно прижаты друг к другу. При повороте вентиля одна из них меняет свое положение и начинает поступать вода. При этом червячная деталь выполняет по мере вращения вентиля поступательные движения, за счет которых открывается доступ в водопроводную трубу.
Фото — однорычажный кран
Нужно отметить, что эксплуатация такого водяного крана будет более продолжительной, если есть возможность поменять картриджи (в керамике) или пластины (в червячном механизме).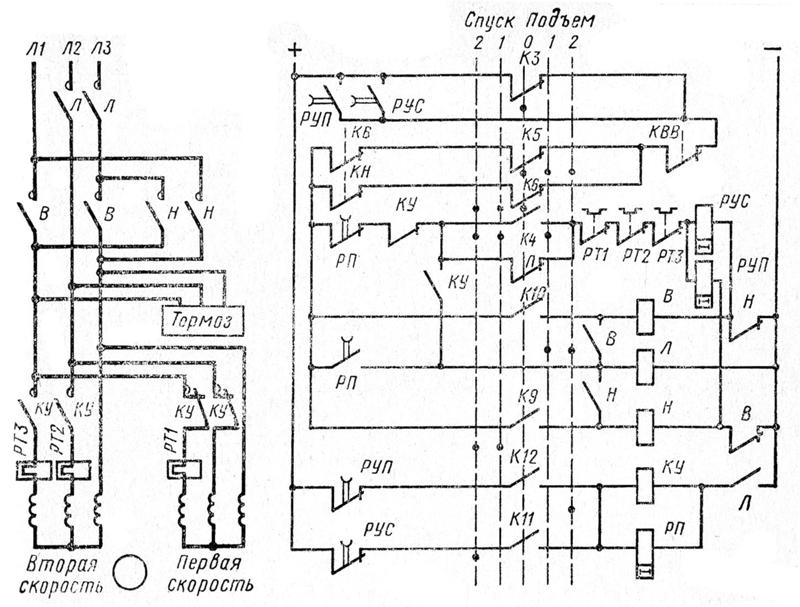 Желательно чтобы носик крана был выполнен из прочных, коррозионностойких материалов – медь, латунь. Даже легированная сталь со временем покрывается чешуйками ржавчины, что в дальнейшем станет причиной протеканий излива.
Желательно чтобы носик крана был выполнен из прочных, коррозионностойких материалов – медь, латунь. Даже легированная сталь со временем покрывается чешуйками ржавчины, что в дальнейшем станет причиной протеканий излива.
Двухвентильный кран для воды является аналогом смесителя, у них одинаковое устройство. В отличие от кухонного крана, он предназначен для смешивания, поэтому может использоваться для установки в различных условиях – душевой, ванной, т. д. корпус выполняется преимущественно из латуни, покрытой тонким слоем хрома – это повышает стойкость сплава и придает изливу красивого блеска. Управление потоками производится двумя кранами-буксами, которые могут быть шарикового или пластинчатого типа.
Каждая водопроводная труба (для горячей и холодной воды) подключена к отдельному выводу – своему вентилю. Отверстие закрыто шариками или керамическими картриджами. При повороте вентиля, запорные механизмы открывают трубу. Смешивание производится непосредственно в изливе, у которого носик оснащается аэратором.
Фото — принцип работы двухрычажного крана
Еще бывает модель душевого типа. Она отличается тем, что в её конструкцию помимо двух буксов также входит лейка. Лейка также оснащена специальным аэратором, разбивающим поток воды на большое количество струек, благодаря этому обеспечивается лучшее распределение жидкости. Для того чтобы поток поступал в носик душа, используется дополнительный вентиль. Но он не работает без буксов. Сначала требуется открыть краны, поставляющие воду, а после вентиль душевого слива. Его принцип действия основан на перекрытии одного канала и открытие другого. Он также бывает шарового и пластинчатого типа.
Фото — вентильная ретро модель
Устройство тележки
На жесткой тележке располагаются:
- Устройства подъёма и передвижения.
- Узел распределения тока.
- Механизм безопасности, ограничивающий максимально возможный вес и высоту подъема груза.
При поднятии веса более чем на 10% превышающего возможности кранового механизма, подъем груза прекратится. Также при приближении к краю рельсового пути тележка автоматически останавливается. При выходе из строя тормозов остановку тележки обеспечивают буфера.
Также при приближении к краю рельсового пути тележка автоматически останавливается. При выходе из строя тормозов остановку тележки обеспечивают буфера.
Функциональные особенности
Многообразие задач, которые способен решать стреловой кран можно объединить общими функциональными особенностями. К таким особенностям относятся:
- возможность работы с грузами различной массы и габаритов;
- устанавливать стреловой кран в условиях пересечённой местности;
- проводить погрузочно-разгрузочные работы в различных климатических условиях;
- устанавливать в условиях городской среды на ограниченном пространстве.
Во многом функциональные особенности определяются конструкцией и характеристиками установленной стрелы.
Монтажная схема мостового крана
Для установки подъемно-транспортного оборудования разрабатывается специальная монтажная схема, показывающая принцип соединения узлов и регламентирующая максимально допустимые пределы.
Группа конструкций для монтажа грузоподъемного оборудования мостового типа имеет следующий вид: полумосты, главные и вспомогательные грузовые тележки, балансиры, кабина, системы безопасности.
Установка кранового оборудования должна проводиться с сохранением расстояний от несущих конструкций до несущих стен, оборудования. После завершения монтажных работ все размеры должны быть тщательно проверены в натуральную величину – только это сможет обеспечить полноценное и безопасное функционирование кранового оборудования.
Рис. 3. Чертеж мостового крана с указанием габаритов приближения
Мостовые краны – это надежные грузоподъемные устройства, которые используются повсеместно. Единственным их недостатком можно назвать большой вес и статичность, однако в рамках помещения они способны забирать груз из любой труднодоступной точки.
Конструкция шаровых смесителей
Шаровые смесители в сантехнике используются относительно недавно. Они быстро завоевали популярность благодаря исключительному удобству в эксплуатации в сравнении с вентильными устройствами.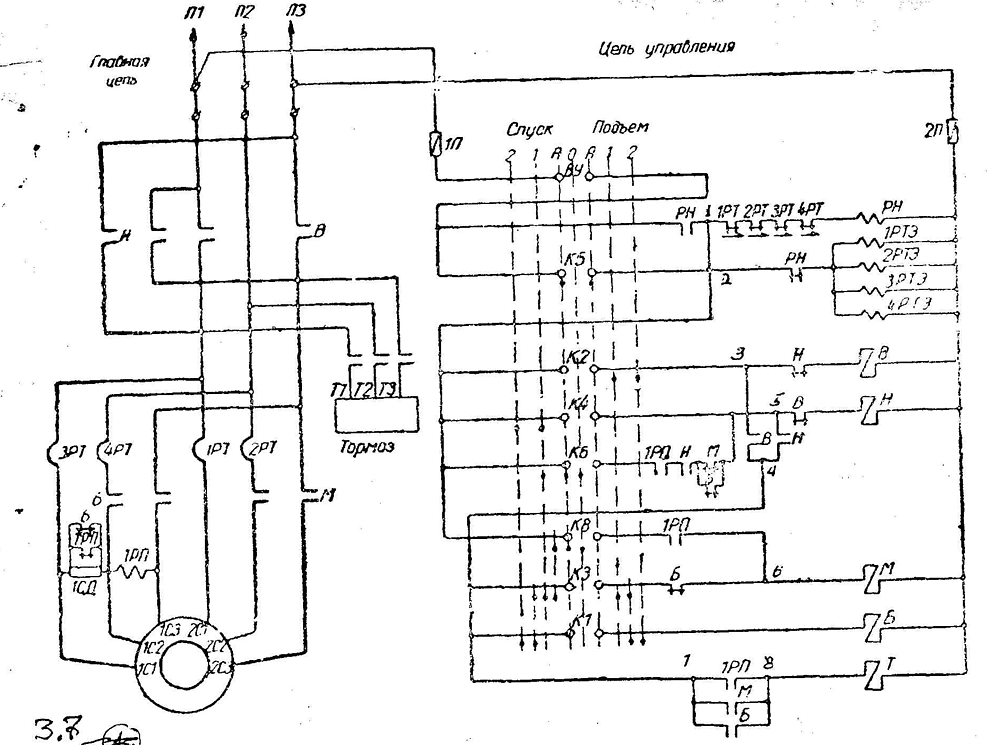 Подробно устройство водопроводного шарового крана отражено на схеме:
Подробно устройство водопроводного шарового крана отражено на схеме:
Центральный элемент в устройстве шарового водопроводного крана — картридж, который можно вращать как влево-вправо, так и вверх-вниз
Внутри корпуса размещен шарообразный картридж, в котором имеются три отверстия. Через два из них в полость картриджа поступает холодная и горячая вода, а через третье уже смешанный и доведенный до необходимой температуры поток подается на излив.
Для управления движением картриджа используется только один рычаг. Движением влево-вправо регулируется количество холодной и горячей воды, поступающей в смеситель, т. е. ее температура. Чтобы увеличить или уменьшить напор воды, необходимо двигать рычаг в направлении вверх-вниз. Таким образом можно отрегулировать температуру и напор потока воды всего парой движений.
Обратите внимание, что из-за высокой популярности шаровых смесителей на рынке появилось множество подделок низкого качества. Толщина металла корпуса такого устройства должна быть не менее 2 мм.
 Отличить хороший кран можно по весу: качественная модель тяжелее.
Отличить хороший кран можно по весу: качественная модель тяжелее.Следует отметить, что отремонтировать шаровый смеситель в домашних условиях вполне возможно. Для этого устройство разбирают и полностью заменяют керамический картридж на новый. Разумеется, стоимость такого ремонта значительно выше, чем замена обычной прокладки вентильного механизма. Картриджи различных моделей могут отличаться, поэтому при ремонте рекомендуется:
- разобрать испорченный смеситель;
- вынуть неисправный картридж;
- отнести его в магазин сантехники;
- приобрести идентичное устройство;
- завершить ремонт.
Вынимая картридж, нужно запомнить его расположение, чтобы установить новый элемент правильно.
Простейшая модель шарового крана используется довольно давно. Это несложный механизм, который позволяет просто перекрывать поток воды. Чаще всего такие устройства применяются в трубопроводах, например, в отопительных системах. Устройство крана этого типа представлено на схеме ниже:
Такой простой и надежный шаровый кран используется не для регулирования температуры или напора воды, а только для открывания-закрывания потока
Чтобы перекрыть поток воды, достаточно повернуть ручку на 90 градусов. Эта простая конструкция используется обычно не слишком интенсивно, поэтому ломается крайне редко.
Эта простая конструкция используется обычно не слишком интенсивно, поэтому ломается крайне редко.
Проверка правильности монтажа электрических цепей | Пусконаладочные работы при монтаже электроустановок
Классификация
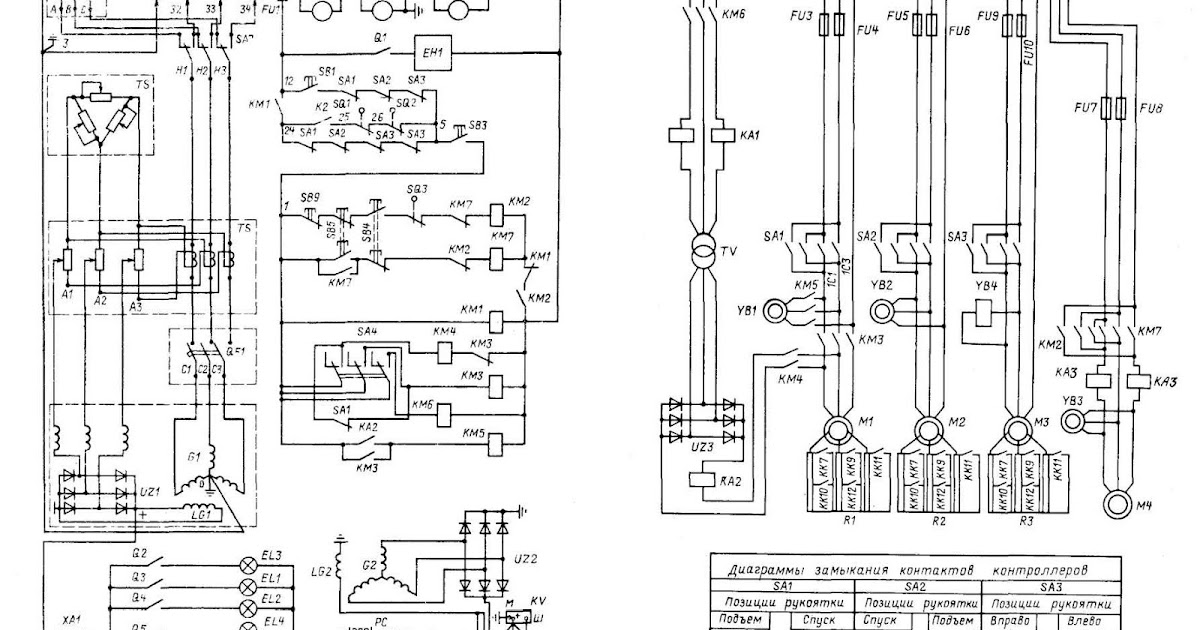
Электросхемы мостового крана отвечают за различные узлы механизма и могут быть: принципиальные, монтажные и маркированные, элементные. Принципиальные объяснят принципы работы электрооборудования, порядок поступления тока по электроцепи. Схема составляется при нахождении кранового оборудования в нормальном состоянии (не подверженного внешним воздействиям).
Принципиальные схемы очень удобны при проведении ремонтных работ и наладке подъемно-транспортного механизма. На ней четко отображаются все конструктивные элементы, все удобно разбито по цепочкам, которые легко запоминаются.
Электроцепи на чертеже механизма подразделяются на цепи питания и управления, каждая из которых имеет собственное обозначение (толстые и тонкие линии). На монтажной схеме указывается взаимное расположение источников питания и электрооборудования.
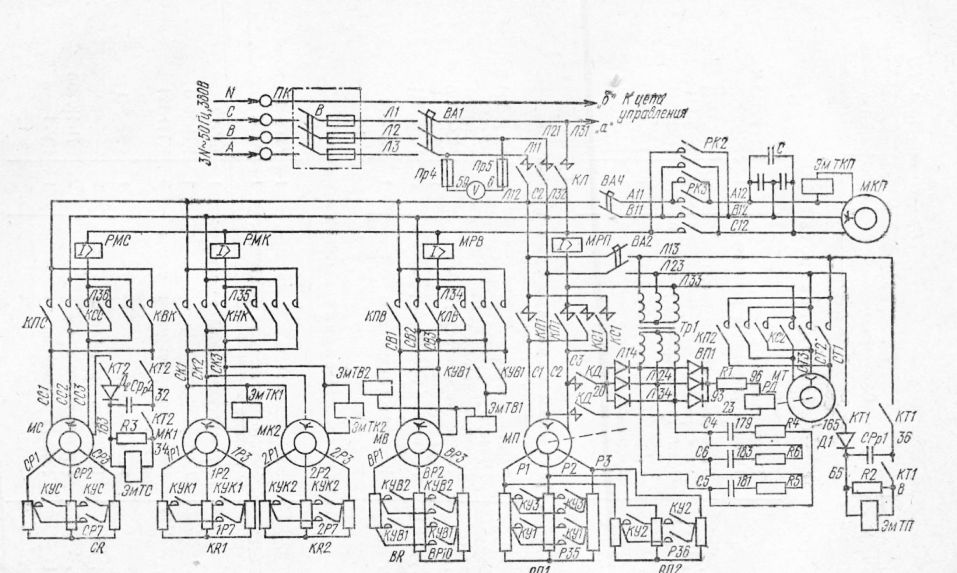
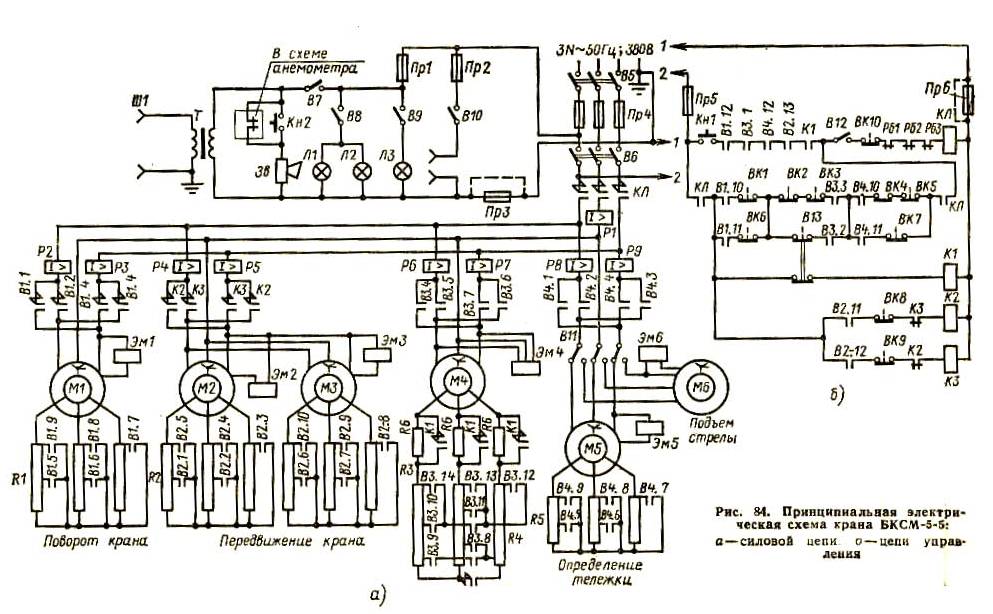
Рис. 1. Принципиальная электрическая схема мостового крана с описанием
Каждый элемент эл. схемы мостового крана имеет собственное обозначение. Барабанные контроллеры имеют вид разверток, подвижные контакты на чертеже представлены как прямоугольники, а положение обозначается пронумерованными линиями.
Как правило, электрические схемы указывают на последовательность соединения всех элементов: управления, подъема и перемещения, защиты, но не передают пропорциональность их расположения.
Рассмотрим эл. схемы мостового крана на 5 тонн: схема электропривода, защитной панели переменного тока, схема реверсирования.
Монтаж внутренних соединений шкафов управления
Смотрите также
Монтаж устройств и систем автоматики электротермических установок
17.11.2017
Заземляющие устройства
17.11.2017
Термоусаживаемые муфты — новый способ соединения и оконцевания кабелей
28. 10.2017
10.2017
При монтаже щитов, устройств, вторичных цепей необходимо выполнять следующие правила:
- до начала работ необходимо изучить рабочие чертежи, техническую документацию,
- все аппараты, расположенные внутри ящика или шкафа, соединяют между собой неразъемными перемычками без вывода проводов на наборные зажимы. Цепи для подключения внешних устройств присоединяют на зажимы планок (реек). Провода до прокладки выправляют и протирают ветошью, пропитанной парафином,
- по панелям шкафов провода прокладывают только вертикально и горизонтально. Радиус изгиба проводов — не менее трех диаметров провода. К панели провода крепят скобами с изолирующими прокладками. Потоки проводов закрепляют бандажами через 200 мм.
- переход проводов с корпуса щита на подвижную дверцу или подвижные контакты устройства выполняют гибкими медными проводами в виде вертикально скручивающегося жгута без разрезания проводов.
Жгут крепится к корпусу и дверце с помощью скобки. Неподвижный корпус ящика управления соединяется с дверцей с помощью многожильного голого провода. Кольца на концах жил располагают в зажиме по ходу винта, который затягивают плотно, не допуская «выдавливания» жилы или срыва резьбы.
Неподвижный корпус ящика управления соединяется с дверцей с помощью многожильного голого провода. Кольца на концах жил располагают в зажиме по ходу винта, который затягивают плотно, не допуская «выдавливания» жилы или срыва резьбы.
Если к зажиму присоединяют два провода, то между кольцами прокладывают шайбу. Соединение больше двух проводов под один винт запрещается. Не допускается изгибать жилы или делать на них кольца плоскогубцами или кусачками.
Проводники у наборных зажимов аппаратов должны иметь маркировку, которую записывают на окольцевателях из пластмассы составной надписью или из полимерной трубки длиной 20 мм или 15 мм.
Надписи на трубках-оконцевателях наносят с двух сторон несмывающимися чернилами. Навешивать на провода бирки вместо окольцевателей запрещается.
Переключатели и ключи управления подключают в соответствии с диаграммой замыкания контактов, которую приводят на чертеже с принципиальной схемой.
Применение проводов и кабелей с алюминиевыми жилами для внутреннего монтажа щитовых устройств не допускается.
Монтаж соединений в щитовых устройствах.
1 По принципиальной электрической схеме составляется схема соединений адресным методом (рис. 1).
2 На панели ящика размещаются необходимые электричсекие аппараты.
Рисунок 1. Схема электрическая соединений ящика управления электроприводами
Намечается трасса, по которой будут прокладываться провода. Выполняются необходимые замеры на панели и в соответствии с полученной трассой составляется эскиз жгута (рис. 2).
Рисунок 2. Пример составления эскизов для заготовки проводов: а) эскиз, б) общий вид.
На эскизе у линий проставляется длина участка в мм и в кружочке — количество проводов на участке (определяется по схеме соединений, выполненной адресным способом).
3. На универсальном шаблоне, который представляет собой перфорированную плиту с отверстиями диаметром 3 — 5 мм, расположенными на расстоянии 25 — 50 мм, наносится мелом контур жгута. Выставляются концевые и угловые шпильки.
4. Выбираются провода для монтажа цепей главного тока и вторичных цепей. В соответствии с эскизом нарезаются провода необходимой длины, протираются их ветошью, пропитанной парафином и выправляются.
В соответствии с эскизом нарезаются провода необходимой длины, протираются их ветошью, пропитанной парафином и выправляются.
5. Маркируются провода. Надеваются с каждого конца провода трубки-бирки и с помощью несмываемых чернил наносится маркировка, соответствующая маркировке на схеме соединений.
Маркировку на панелях, пультах, приборах, аппаратах наносят краской по трафарету, на кабели — подвесными бирками или надписями на манжетах оконцеваний, на жилах и проводах — надписью знаков на оконцевателях, поливинилхлоридных трубках, на изоляции проводов маркировочной липкой лентой.
Для обозначения фаз или полярности жилы маркируют красками различных цветов или монтируют провода с цветной изоляцией (для фазы А — желтый, В — зеленый, С — красный). Цепи постоянного тока различают применяя проводники с синей изоляцией (минус) и красной (плюс).
6. Раскладываются провода на шаблоне в соответствии с составленным эскизом. Связываются провода в жгут (ниточным бандажом, перфорированной лентой, полоской пряжной и т. д.) рис. 3. С помощью доски и деревянного молотка выравниваются потоки проводов.
д.) рис. 3. С помощью доски и деревянного молотка выравниваются потоки проводов.
Рис. 3. Скрепление жгутов: а) вязка жгута нитками, б) плоскими, в) перфорирован ной лентой, г,д) челноки
7. Снимается изоляцию с концов проводов. Тестером или мегаомметром «прозванивается» собранный жгут и проверяется маркировка проводов (рис. 4).
Рис. 4. Схема прозвонки жил кабеля: 1- щуп, 2- прибор, 3- зажим, 4- индикатор, 5- батарейка, 6- кабель.
Прозвонка жил протяженных цепей производится следующим образом: один конец жилы соединяется с корпусом, а второй конец отыскивается щупом прибора, при условии, что другой щуп соединен с корпусом щита управления. Короткие цепи можно проверить с помощью лампочки и батарейки (прозвонкой). Кроме того, существуют специальные устройства для отыскания маркировки жил жгута. Например, УММК-55.
Оконцовываются провода в жгуте (штырем или кольцом) в зависимости от вида соединения их с электрическими устройствами и аппаратами рис. 5. Многопроволочные медные провода необходимо пропаять.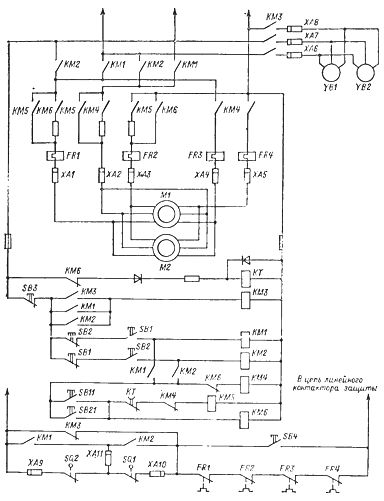
Рис. 5. Последовательность операций опрессовки в кольцевых наконечниках: а) удаление изоляции, б) скрутка и укладка в наконечник, в) опрессовка клещами, г) подключение алюминиевой жилы, 1 – штыревой вывод, 2 – гайка, 3 – оконцованная жила провода, 4 – шайба, 5 – пружинная шайба.
Переносится жгут на панель ящика и производится подключение проводов к зажимам и выводам приборов и аппаратов, рис. 6. К одному контакту можно подключать не более 2-х проводов.
Рис. 6. Переход проводов на подвижные конструкции: 1-скоба, 2-жгут из проводов, 3-навесы.
Пайка незакрепленных соединений (в стык или в нахлестку) не допускается. При тесном расположении контактов жилы закрепляются и после пайки натягивается на жилу поливинилхлоридная трубка. Короткие перемычки между соседними контактами можно выполнять продолжением подключаемой жилы провода.
Рис. 7. Провода и электрические аппараты в шкафу управления
По окончании монтажа проводится контроль качества. При этом внешним осмотром проверяется маркировка проводов по схеме соединений, отсутствие подрезов токопроводящих жил, качество их лужения, отсутствие повреждений и загрязнений изоляции.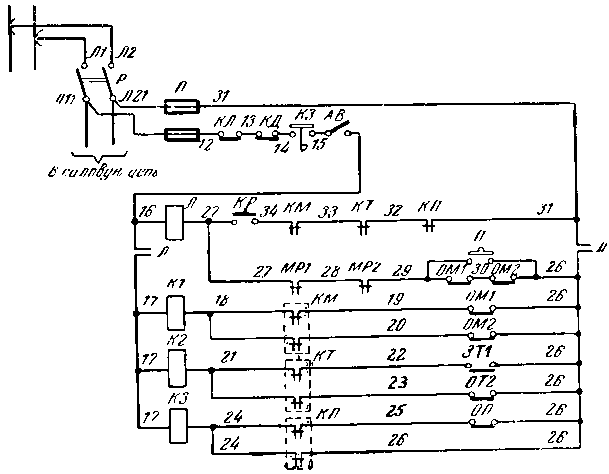
Механическая прочность пайки жил проверяется пинцетом с надетым на его концы трубками из поливинилхлорида. Усилие тяжения вдоль оси провода должно быть не более 10 Н. Запрещается перегибать провод от места пайки.
После контроля пайки место спая окрашивается прозрачным цветным лаком. Правильность присоединений проводов определяется с помощью тестера.
Контроль заключается в следующем: к одному выводу цепи тестера подключается сначала конец проводника, направление которого необходимо определить. Затем к концам проводников, расположенных в другой части аппарата или комплектного устройства поочередно присоединяется второй вывод тестера. Когда цепь оказывается замкнутой проводником, тестер покажет минимальное значение сопротивления. Это дает возможность убедиться, что данный конец является искомым.
Защитная крановая панель
Панель защиты на крановом оборудовании используют при управлении с помощью контроллера. Визуально это шкаф с аппаратурой внутри. Шкаф закрывается как на обычный замок, так и блокируется с помощью электрорубильника. То есть если крановый механизм подключен к электросети, вы не сможете открыть шкаф.
То есть если крановый механизм подключен к электросети, вы не сможете открыть шкаф.
Панели используются для защиты кранов, имеющих от 3 до 6 электродвигателей. Для переменного тока на 220, 380 и 500 В используются панели типа «ПЗКБ», для постоянного тока 220 и 440 В — типа «ППЗКБ».
Защитная панель включает в себя устройства:
- Максимальная – защита от перегруза и замыкания электросети.
- Нулевая – предотвращает произвольный запуск после проблем с энергоснабжением.
- Концевые – активирует тупиковые упоры на краях рельсовых путей.
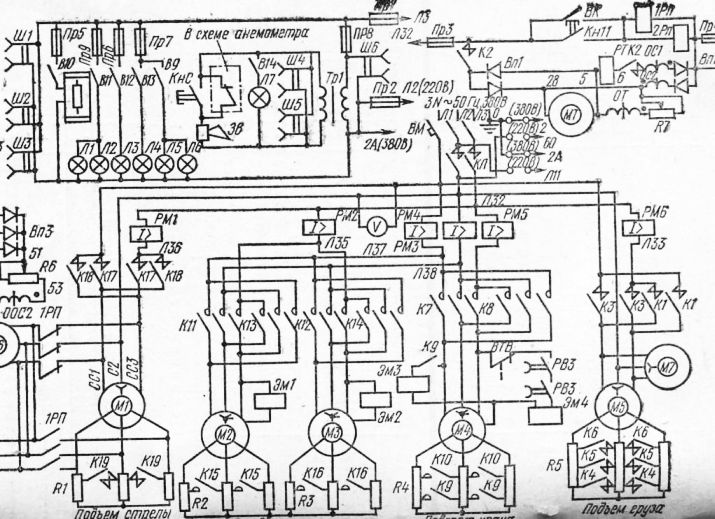
Рис. 2. Схема защитной панели
Для схемы на рисунке 2 защитное воздействие на цепь оказывается с помощью контактных реле. Размыкающие контакты последовательно подключены в катушку линейного контактора, а катушка реле – в силовую цепь электродвигателя. (Все катушки реле имеют обозначения KF).
При превышении тока в цепи контакты реле размыкаются и электрооборудование отключается от внешней энергосети. Это позволяет сберечь крановый двигатель и проводку.
Это позволяет сберечь крановый двигатель и проводку.
Схема реверсирования и управления краном
Рис. 3. Принципиальная схема блокировки при реверсировании
Двигатель М запускается пускателем КМ1 и вращается по часовой стрелке. Контакт КМ1:3 размыкается, и блокирует поступление тока до включения КМ1, цепь питания пускателя КМ2 разомкнута и не включается. Реверсирование двигателя производится кнопками SВ1 и SВ2, при последовательном нажатии которых он начнет обратное движение. SВ2 разрывает цепь питания катушки КМ1 и далее замыкает катушку КМ2 (механическая блокировка). Включение пускателя КМ2 и запускает реверсивное движение. При этом контакт КМ2:3 размыкается и блокирует пускатель КМ1.
Принципиальная электрическая схема для кран-балки
Рис. 4. Принципиальная электрическая схема кран-балки
Питание к катушкам и контактам контакторов подъема (КМ1) и спуска (КМ2), для передвижения вперед (КМЗ) и назад (КМ4) подводится через электрический кабель. Подъем тележки вверх ограничен выключателем SQ. Кроме того, устройство блокирует кран при превышении допустимой грузоподъемности.
Подъем тележки вверх ограничен выключателем SQ. Кроме того, устройство блокирует кран при превышении допустимой грузоподъемности.
Электрические схемы на кранах могут различаться исходя из типа и количества двигателей, грузоподъемности, однако общие принципы их построения одинаковы для всего подъемно-транспортного оборудования.
Управление работой осуществляется при помощи реверсивных пускателей в кабине оператора или кнопок на гибком магнитном кабеле.
Принципиальная электросхема помогает грамотно установить кран и упростит его техническое обслуживание. Тщательное соблюдение заводских требований поможет снизить негативное воздействие на крановые механизмы.
Виды электрических схем
Стоит также напомнить, что схема это чертёж, выполненный в условных обозначениях или взаимосвязанных блоков. Схемы, относящиеся к электрическим сетям, называют электрическими.
По типам электрические схемы делят на принципиальные и монтажные. Первые делаются в условных обозначениях и показывают связь между элементами электрической цепи. Вторые, показывают реальное расположение элементов цепи с указанием приёмов и способов монтажа.
Вторые, показывают реальное расположение элементов цепи с указанием приёмов и способов монтажа.
По видам электрические схемы могут быть:
- Схемы первичной и вторичных цепей;
- Полно линейные и однолинейные;
- Краткие и развернутые.
Напомню, вид это группа схем с общими признаками. Виды и типы электрических схем пересекаются. Например, схема первичной цепи может быть трехлинейной или однолинейной, принципиальной или развернутой монтажной.
Схемы первичных цепей
Это электрические схемы выработки, преобразования, передачи и распределения электрической энергии. Данные схемы являются основными схемами, показывающими основной поток прохода электрической энергии от источников до потребителей.
Вторичных цепей
Это схемы электрических цепей напряжением до 1000 В. Данные схемы вторичных цепей (ПУЭ Глава 3.4) это схемы управления, сигнализации, контроля, автоматики и релейной защиты электрических установок напряжением до 1 кВ.
Однолинейные
В данных схемах показывается электрооборудование только одной фазы.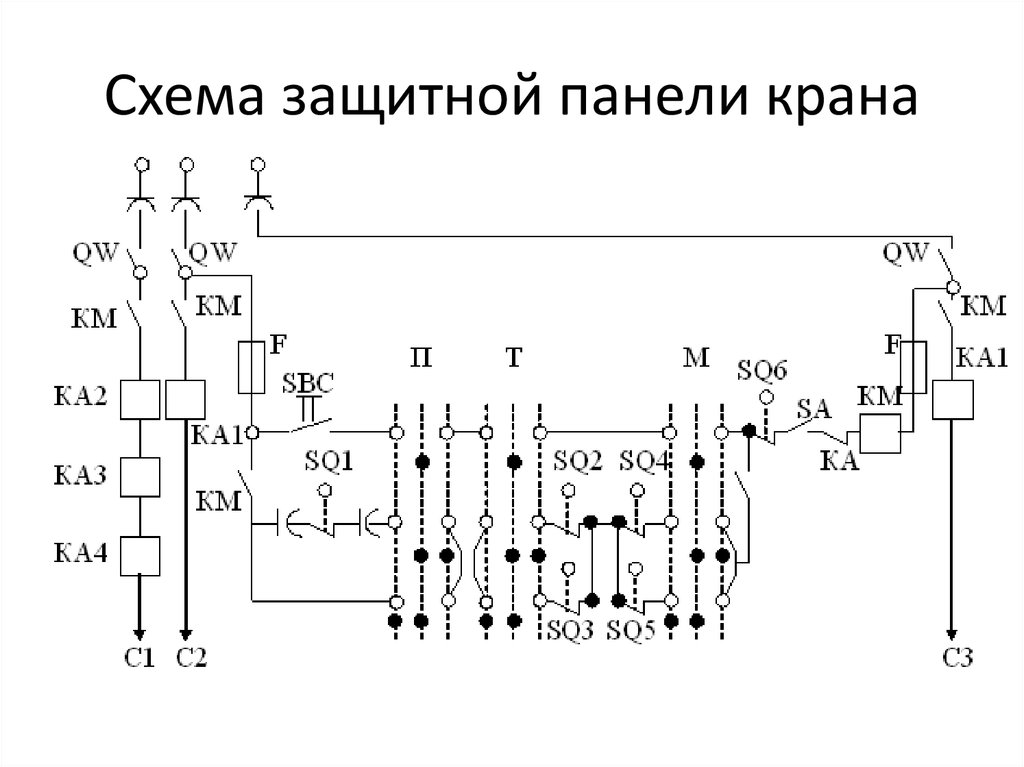
Полно линейная схема
Это схема всех трех фаз цепи. Втрое название – трёхфазная схема цепи.
Краткие и развёрнутые схемы
Развернутые схемы отображают функциональные группы электроцепей, например, отдельная схема включения/отключения электрического выключателя.
В дополнение к перечисленным схемам, можно добавить схему кабельных трасс.
Рейтинг
( 1 оценка, среднее 4 из 5 )
Понравилась статья? Поделиться с друзьями:
Страница не найдена — ACCO Material Handling Solutions
Мы ценим ваш интерес к нашей организации и заверяем вас, что мы заинтересованы в вашей квалификации. Потенциальные сотрудники будут получать вознаграждение без дискриминации по признаку расы, вероисповедания, цвета кожи, пола, возраста, национального происхождения или инвалидности. При трудоустройстве будут соблюдаться принципы равных возможностей трудоустройства.
Фамилия*
Имя*
Отчество*
Email*
Address*
City*
State*
Select StateAlabamaAlaskaArizonaArkansasCaliforniaColoradoConnecticutDelawareDistrict of ColumbiaFloridaGeorgiaHawaiiIdahoIllinoisIndianaIowaKansasKentuckyLouisianaMaineMarylandMassachusettsMichiganMinnesotaMississippiMissouriMontanaNebraskaNevadaNew HampshireNew JerseyNew MexicoNew YorkNorth CarolinaNorth DakotaOhioOklahomaOregonPennsylvaniaRhode IslandSouth CarolinaSouth DakotaTennesseeTexasUtahVermontVirginiaWashingtonWest VirginiaWisconsinWyomingArmed Forces (AA)Armed Forces (AE)Armed Forces (AP)American SamoaGuamNorthern Марианские островаПуэрто-РикоМалые отдаленные острова СШАВиргинские острова СШАМеждународный
Zip*
Номер телефона*
Лицо, чтобы уведомлять в случае несчастного случая или чрезвычайной ситуации:
Имя*
Номер телефона*
Адрес*
Применяется к*
. *
*
Как вас направили в ACCO?*
Были ли вы когда-либо осуждены за преступление?*
ДаНет
Если да, то когда, где и характер правонарушения?
Вам 18 лет или больше?*
ДаНет
Имеете ли вы законное право на работу в США?*
ДаНет
Являетесь ли вы ветераном военной службы США?* Ранг и тип службы
Полученное обучение/опыт
Хотите ли вы, чтобы вас признали инвалидом и чтобы вас рассматривали в рамках нашей Программы позитивных действий для инвалидов?*
ДаНет
Вы работали в ACCO раньше?*
ДаНет
Если да, укажите даты:
С
По
Подразделение/Отдел
Любая дополнительная информация, связанная с изменением имени вымышленное имя или псевдоним, необходимые для проверки вашей работы или образования?
Да Нет
Если да, укажите имя(а)
Название/местонахождение средней школы*
Курс обучения*
года завершены*
Вы получили выпускные*
Диплом или степень*
Имя/Расположение колледжа
Курс обучения
года.
Название/расположение дополнительного колледжа
Курс обучения
Количество лет обучения
Вы закончили
Диплом или степень
Наименование/местоположение другой школы
Курс обучения
года завершен
Вы получили
Диплом или степень
работодатель 1
Работник*
9000 9000 9000 9000. Адрес.
Телефон работодателя*
Дата начала*
Дата окончания*
Должность*
Начальная зарплата*
Конечная зарплата*
5
002 Название супервайзера*
Причина для ухода*
Работодатель 2
Работодатель
Адрес работника
Телефон
Дата старта
Конец
Дата старта
Конец
Начало
Зарплата Конец
Имя руководителя
Причина увольнения
Работодатель 3
Работодатель
Employer Address
Employer Phone
Start Date
End Date
Job Title
Salary Start
Salary End
Supervisor Name
Reason for Leaving
Employer 4
Работодатель
Адрес работодателя
Телефон работодателя
Дата начала
Дата окончания
Должность
Запуск заработной платы
Конец заработной платы
Название супервайзера
Причина покинуть
Можем ли мы связаться с настоящими и предыдущими работодателями?
Специальная подготовка или навыки*
Хобби и интересы*
Прикрепить резюме
Я понимаю, что работодатель следует политике «найма по собственному желанию», в том смысле, что я или работодатель могу уволить меня в любое время или по любой причине, не противоречащей применимому законодательству штата или федеральному законодательству; эта политика «найма по желанию» не может быть изменена ни в устной, ни в письменной форме, за исключением случаев, когда такое изменение специально санкционировано в письменной форме главным операционным офисом этой организации. Я понимаю, что данное заявление не является трудовым договором. Я понимаю, что федеральный закон запрещает прием на работу неуполномоченных иностранцев; все нанятые лица должны предоставить удовлетворительное подтверждение разрешения на работу и удостоверения личности; непредоставление таких доказательств приведет к отказу в приеме на работу.
Я понимаю, что данное заявление не является трудовым договором. Я понимаю, что федеральный закон запрещает прием на работу неуполномоченных иностранцев; все нанятые лица должны предоставить удовлетворительное подтверждение разрешения на работу и удостоверения личности; непредоставление таких доказательств приведет к отказу в приеме на работу.
Насколько я понимаю, это заявление будет действовать в течение одного года, по истечении этого времени, если я хочу, чтобы меня рассматривали для трудоустройства, я должен подать новое заявление.
Я понимаю, что работодатель тщательно изучит мою работу и личную историю и проверит все данные, указанные в этом заявлении, в соответствующих документах и на собеседованиях. Я разрешаю всем лицам, школам и фирмам, указанным в нем, за исключением моего нынешнего работодателя, если это указано, предоставлять любую запрошенную информацию обо мне, и я освобождаю их от любой ответственности за ущерб, причиненный в результате предоставления этой информации.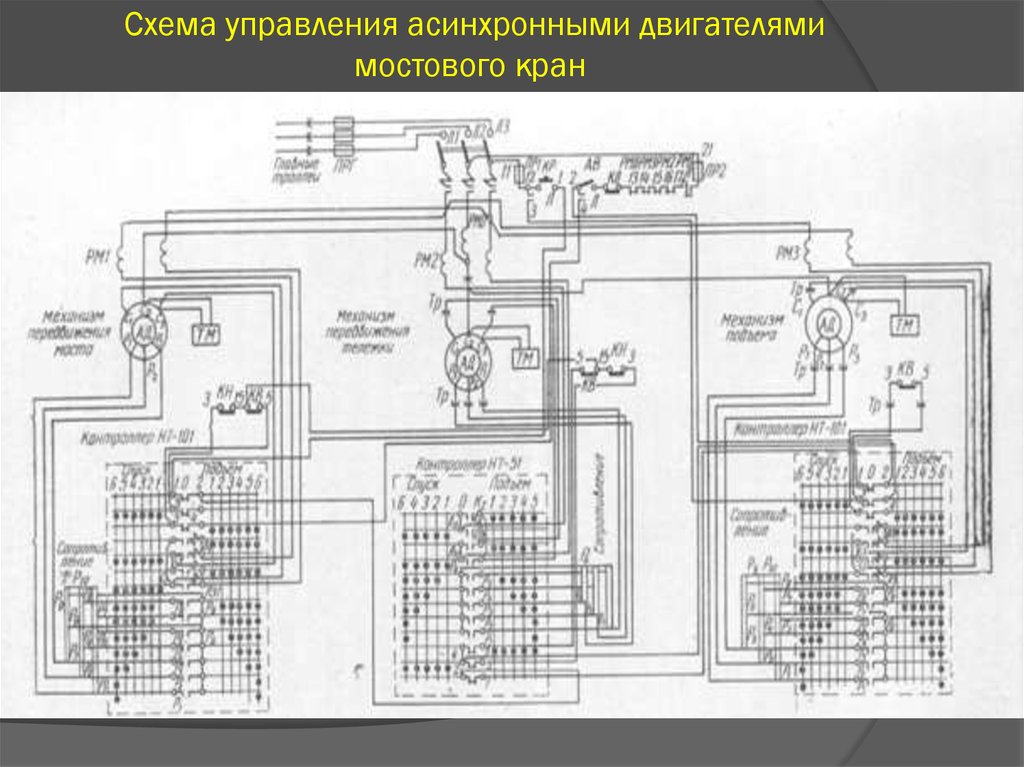
Я подтверждаю, что все приведенные здесь утверждения верны, и понимаю, что любая фальсификация или умышленное упущение будут достаточным основанием для увольнения или отказа в приеме на работу.
Согласен.
Электронная подпись — Ваше полное имя*
Пожалуйста, оставьте это поле пустым.
Дата*
Ваша личная информация не будет передана без вашего согласия.
Прикладные науки | Бесплатный полный текст
1. Введение
Мостовые краны играют важную роль в качестве одного из средств транспортировки тяжеловесных грузов в морских портах, на сталелитейных заводах и других предприятиях [1]. Как типичная система с недостаточным приводом, мостовой кран легко подвергается воздействию различных внешних воздействий, так что груз часто раскачивается в процессе транспортировки, что серьезно влияет на точность позиционирования груза и создает множество небезопасных возможностей, в то же время снижая эффективность системы [2,3].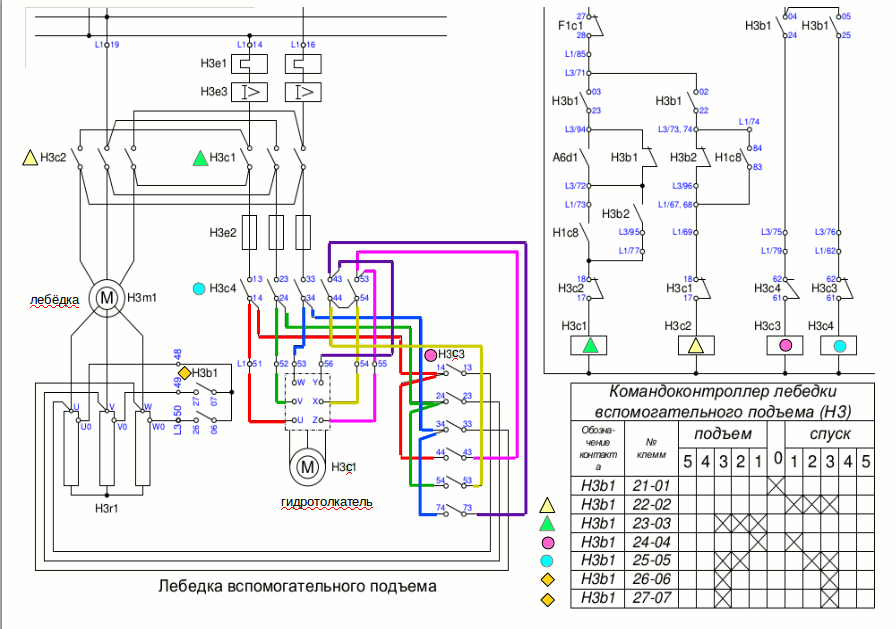 Предотвращение раскачивания загрузки и повышение безопасности и эффективности являются основными проблемами при изучении кранов. Следовательно, цель управления мостовым краном обычно включает две части: быстрое и точное позиционирование и эффективное подавление раскачивания, особенно с учетом внешнего сопротивления (например, сопротивления ветра, стохастического столкновения) во время транспортировки грузов.
Предотвращение раскачивания загрузки и повышение безопасности и эффективности являются основными проблемами при изучении кранов. Следовательно, цель управления мостовым краном обычно включает две части: быстрое и точное позиционирование и эффективное подавление раскачивания, особенно с учетом внешнего сопротивления (например, сопротивления ветра, стохастического столкновения) во время транспортировки грузов.
В последнее время было проведено много исследований для решения вышеупомянутых проблем. Наиболее распространенным и прямым управлением является формирование входных данных, с помощью которого для тележки планируются подходящие траектории путем тщательного анализа связи между движением тележки и качанием полезной нагрузки [4,5,6,7,8]. Была предложена модифицированная составная стратегия нелинейной обратной связи для улучшения переходных характеристик и устранения установившихся ошибок при управлении по траектории с учетом насыщения усилия шины [9].]. Для упрощения конструкции регулятора в [10, 11, 12] использовались операции линеаризации с частичной обратной связью. В качестве решения проблемы наличия неопределенностей в крановой системе в [13,14,15] был предложен метод адаптивного управления. Кроме того, были применены более интеллектуальные методы для повышения надежности этих методов. Оптимизатор роя частиц в [16] применялся для определения оптимальной последовательности приращений управления при наличии ограничений на входные и выходные переменные. Схема управления была успешно протестирована на лабораторном мостовом кране для различных ограничений и условий эксплуатации. В [17] использовался метод управления слежением за ошибками, для которого могут быть заранее заданы ошибочные траектории движения тележки и качания полезной нагрузки. Также были предложены некоторые другие новые методы управления сложностью, чтобы гарантировать быстрое и точное позиционирование и эффективное подавление колебания, такие как схемы управления на основе пассивности [18,19].,20,21] и методы управления скользящим режимом (SMC) [22,23,24]. Что касается неизвестных входов, состояние и выходные векторы системы могут быть реконструированы [25].
В качестве решения проблемы наличия неопределенностей в крановой системе в [13,14,15] был предложен метод адаптивного управления. Кроме того, были применены более интеллектуальные методы для повышения надежности этих методов. Оптимизатор роя частиц в [16] применялся для определения оптимальной последовательности приращений управления при наличии ограничений на входные и выходные переменные. Схема управления была успешно протестирована на лабораторном мостовом кране для различных ограничений и условий эксплуатации. В [17] использовался метод управления слежением за ошибками, для которого могут быть заранее заданы ошибочные траектории движения тележки и качания полезной нагрузки. Также были предложены некоторые другие новые методы управления сложностью, чтобы гарантировать быстрое и точное позиционирование и эффективное подавление колебания, такие как схемы управления на основе пассивности [18,19].,20,21] и методы управления скользящим режимом (SMC) [22,23,24]. Что касается неизвестных входов, состояние и выходные векторы системы могут быть реконструированы [25]. Также важны полный анализ устойчивости на основе Ляпунова в [26], управление на основе генетического алгоритма [27] и методы на основе нечеткой логики [28,29,30].
Также важны полный анализ устойчивости на основе Ляпунова в [26], управление на основе генетического алгоритма [27] и методы на основе нечеткой логики [28,29,30].
Однако большинство из вышеперечисленных методов основаны на некоторых жестких предположениях, например, начальный угол поворота полезной нагрузки должен быть равен нулю, точный угол поворота полезной нагрузки в реальном времени может быть известен априори, или измерения датчика скорости могут быть снято без шума. На самом деле полезная нагрузка легко колеблется в неприемлемом диапазоне в реальных рабочих условиях, где часто возникают некоторые внешние возмущения, такие как сопротивление ветра и стохастические столкновения. Таким образом, эти вышеприведенные методы слабы в подавлении возмущений и плохи для реальных приложений, потому что они относятся к структурам управления без обратной связи. Замкнутая система управления с обратной связью по значениям измерения угла поворота полезной нагрузки в реальном времени является наиболее эффективным способом решения проблемы противодействия раскачиванию. Кроме того, мостовые краны обычно моделируются линейно, что игнорирует их нелинейные характеристики и, таким образом, не может гарантировать практическую эффективность крана. Поэтому в этой статье предлагается стратегия управления с замкнутым контуром, препятствующая раскачиванию. Эта система управления имеет две величины обратной связи: перемещение тележки и угол поворота, которые измеряются в режиме реального времени. Нелинейные характеристики, скрытые в крановой системе, преобразуются в эквивалентное входное возмущение, которое может быть оценено предиктором возмущения.
Кроме того, мостовые краны обычно моделируются линейно, что игнорирует их нелинейные характеристики и, таким образом, не может гарантировать практическую эффективность крана. Поэтому в этой статье предлагается стратегия управления с замкнутым контуром, препятствующая раскачиванию. Эта система управления имеет две величины обратной связи: перемещение тележки и угол поворота, которые измеряются в режиме реального времени. Нелинейные характеристики, скрытые в крановой системе, преобразуются в эквивалентное входное возмущение, которое может быть оценено предиктором возмущения.
Настоящий документ состоит из следующих четырех частей: упрощенная двухмерная модель системы мостового крана представлена в разделе 2. Конструкция контроллера подробно описана в разделе 3. Стратегия управления проверена путем моделирования и экспериментов в разделе 4. Заключение представлено в разделе 5.
2. Математическая модель
Обычно мостовой кран состоит из подъемной, грузовой и транспортной тележки, как показано на рис. 1. Показана соответствующая ему двумерная упрощенная физическая модель на рис. 2.
1. Показана соответствующая ему двумерная упрощенная физическая модель на рис. 2.
В предположении, что длина подъемного каната l не изменяется при транспортировке и трение между тележкой и платформой μ пренебрежимо мало, т. е. l˙=l¨=0, μ=0, динамическое уравнение двумерной Система мостового крана получается следующим образом:
где M, m — масса тележки и подъемника соответственно, x(t) — горизонтальное перемещение, θ(t) — угол вертикального направления выгрузки, F(t) — движущая сила. M(x, θ)=[m11m12m21m22]=[ml2mlcosθmlcosθM+m] — инерционная матрица системы (1).
Как известно из [31], несмотря на то, что двумерная система с недовозбуждением не может быть полностью линеаризована по состоянию обратной связи, x¨ может быть реализован как системный вход, а управляемая часть количества состояний [x,x˙] может быть линеаризована. Вдохновленная этим, модель двухмерного мостового крана может быть преобразована путем преобразования координат гомеоморфизма:
, где L (x, θ) — уравнение Лагранжа для двумерной системы мостового крана.
Одновременно из (1), (2) получается:
где:
Значение коэффициента костата α(θ) в данной работе принято равным 0 для обеспечения лаконичности структуры преобразованной системы. Позже будет доказано, что на управляемость и наблюдаемость системы выбор значения α(θ) не влияет.
Определить:
Система (1) эквивалентна следующей математической модели:
где:
Из математического описания (8) можно сделать вывод, что нелинейная крановая система (1) может быть эквивалентна линейная комбинация линейной подсистемы и нелинейного члена. Нелинейный член σ можно рассматривать как виртуальное возмущение. Для линейной подсистемы ею можно управлять и наблюдать тогда и только тогда, когда выполняется следующее неравенство:
3. Проектирование и анализ регулятора
Предложена двухконтурная система управления с обратной связью для реализации гашения качания полезной нагрузки. Угол поворота и смещение измерялись в режиме реального времени и использовались в качестве обратной связи в контроллере прогнозирования модели (MPC), как показано на блок-схеме предлагаемой системы управления на рисунке 3. Метод MPC был принят для определения будущих входных данных управления. изменения для уменьшения ошибок, вызванных колебаниями нагрузки. Требуемый угол поворота с опорными траекториями также был вводом контроллера. Предиктор возмущений использовался для оценки значения эквивалентного входного возмущения в реальном времени σ 9e как прогнозируемое значение эквивалентной входной помехи σe, где B+=(BTB)−1BT. Кроме того, чтобы обеспечить точность предсказания эквивалентного входного возмущения, мы ввели фильтр нижних частот F(s) для настройки прогнозируемого частотного сегмента:
Угол поворота и смещение измерялись в режиме реального времени и использовались в качестве обратной связи в контроллере прогнозирования модели (MPC), как показано на блок-схеме предлагаемой системы управления на рисунке 3. Метод MPC был принят для определения будущих входных данных управления. изменения для уменьшения ошибок, вызванных колебаниями нагрузки. Требуемый угол поворота с опорными траекториями также был вводом контроллера. Предиктор возмущений использовался для оценки значения эквивалентного входного возмущения в реальном времени σ 9e как прогнозируемое значение эквивалентной входной помехи σe, где B+=(BTB)−1BT. Кроме того, чтобы обеспечить точность предсказания эквивалентного входного возмущения, мы ввели фильтр нижних частот F(s) для настройки прогнозируемого частотного сегмента:
, где T — постоянная времени.
(2) Алгоритм управления
Период дискретизации был выбран как T m , и система линейных частей может быть дискретизирована следующим образом:
где z m (k) и y(k) обозначают состояние системы и выпуск в момент времени k соответственно и A p ∈R 4 × 4 , B p ∈R 4 × 1 представляют матрицы параметров дискретной системы. I 4 × 4 ∈R 4 × 4 — единичная матрица размера 4 × 4, которая может быть рассчитана как
I 4 × 4 ∈R 4 × 4 — единичная матрица размера 4 × 4, которая может быть рассчитана как
где exp(∗) представляет собой естественную экспоненциальную функцию. Затем мы предложили правильную формулу MPC для управления этой дискретной системой (14).
Для крановой системы нашей целью было транспортировать полезный груз в желаемое положение без остаточных колебаний, при этом желаемое расстояние транспортировки определялось как x d , а цель выходного вектора y(k) была определена как
Для расчета оптимального входа функция стоимости определяется как
где Q, R — матрица весов ошибок и матрица контрольных весов соответственно, а w P (k i ) — эталонное выходное значение, которое определяется как
В каждый момент времени тележка должна двигаться по правильной траектории, чтобы достичь целевого положения. Эталонная траектория с коэффициентом смягчения построена следующим образом:
Эталонная траектория с коэффициентом смягчения построена следующим образом:
4. Моделирование и эксперимент
Моделирование в среде MATLAB/Simulink и эксперименты на лабораторном мостовом кране были реализованы для проверки эффективности предложенной стратегии управления, как показано на рисунке 4. Что касается моделирования, Для оценки угла поворота в реальном времени использовался полномерный наблюдатель состояния Luenberger.
(1) Моделирование
Параметры моделирования мостового крана были следующими: m = 50 кг, l = 3 м и M = 70 кг, g = 9.8 м/с 2 . Стратегия управления была проверена при различных условиях ожидаемого расстояния горизонтального перемещения x d и ожидаемого времени прибытия t f .
Из рис. 5 и 6 видно, что при горизонтальном движении крана угол поворота всегда находится в пределах 1 градуса, а угол поворота почти уменьшился до 0 градусов, когда кран достигает целевого местоположения в течение ожидаемого времени. т ж . Весь процесс управления стал более естественным и плавным.
т ж . Весь процесс управления стал более естественным и плавным.
Из рисунка 7 видно, что угол качания имеет некоторые колебания, когда в систему управления добавляется 1-секундная помеха белого шума, но он может быстро вернуться к нормальному качанию в течение определенного периода времени.
Из результатов моделирования четырех видов методов на рисунке 8 видно, что методы FPID и DPID дают очень похожие результаты. Что касается времени, необходимого для достижения целевого местоположения, наименьшее время требуется для методов FPID и DPID, а наибольшее время — для метода IEID. Что касается времени, за которое значение угла поворота достигает нуля градусов, методы FPID и DPID занимают около 30 с (фактически метод DPID работает немного быстрее, чем метод FPID), метод IEID занимает 35 с, а метод MPC -метод EID занимает 31 с. Однако максимальный угол поворота по методу DPID может достигать более 0,6 градуса, а минимальный угол поворота по методу IEID может достигать 0,5 градуса. Метод MPC-EID имеет умеренную производительность, что является относительно лучшим решением с точки зрения безопасности и эффективности в реальных приложениях.
Метод MPC-EID имеет умеренную производительность, что является относительно лучшим решением с точки зрения безопасности и эффективности в реальных приложениях.
(2) Эксперименты
Для проверки предложенного метода была специально построена лаборатория, как показано на рис. 9. В экспериментальной платформе использовались три асинхронных двигателя переменного тока (AC), которые приводили тележку в движение по рельсам. Максимальная скорость составляла 1 м/с. Из-за ограничений экспериментальной площадки длина гусеницы крана составляла 5,5 м, фактическая полезная длина — 5 м, а максимальная длина каната — 3 м. Максимальная масса полезной нагрузки составляла 1 т. Подвижный датчик расстояния, используемый в этом эксперименте, может достигать точности 1 мм. Используя датчик угла наклона самолета, точность динамического угла поворота и статического угла поворота может достигать 0,01 °. Коэффициент трения составил 0,2. Угол поворота полезной нагрузки должен был оставаться в пределах ±50 мм после остановки механизма через 5 с.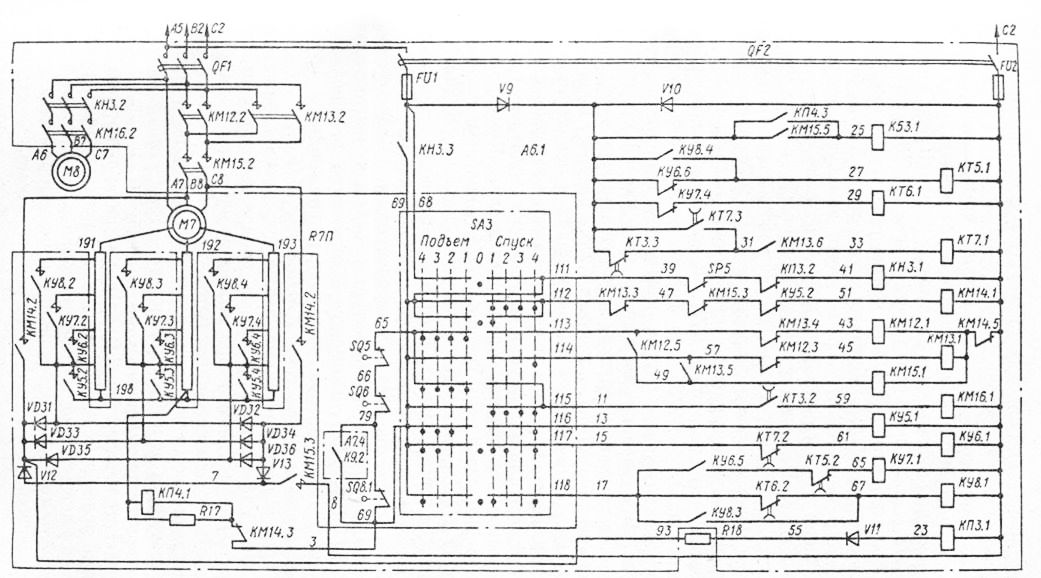
Мы видим, что экспериментальные результаты на рисунке 10 показывают некоторые очевидные различия. Хотя максимальный угол поворота, контролируемый методом FPID, составлял 0,2 градуса, что намного больше, чем угол поворота методом MPC-EID, угол поворота методом FPID сходился быстрее, чем угол поворота методом MPC-EID. Однако флуктуация угла поворота по методу FPID также была больше, чем по методу MPC-EID, когда угол поворота контролировался в определенном диапазоне. Можно сделать вывод, что мостовым краном можно управлять более плавно и безопасно с помощью метода FPID.
Хотя полезная нагрузка колебалась около нуля градусов в течение примерно 15 с, как показано на рис. 11, угол поворота был небольшим в пределах допустимого диапазона, когда тележка прибыла в заданное положение. Также имела место определенная погрешность и задержка угла поворота в процессе транспортировки из-за наличия ряда помех в измеренных значениях углов поворота. Эти две проблемы можно решить, если использовать более совершенный метод обработки данных. Это означает, что метод, предложенный в этой статье, может эффективно реализовать управление краном против качения при наличии внешних возмущений.
Это означает, что метод, предложенный в этой статье, может эффективно реализовать управление краном против качения при наличии внешних возмущений.
5. Заключение
В этой статье предлагается стратегия управления с замкнутым контуром, препятствующая раскачиванию, для достижения надежного подавления возмущений для малоприводных крановых систем с двумя степенями свободы. Предложенный метод был подтвержден моделированием и экспериментом. Моделирование и экспериментальные результаты иллюстрируют удовлетворительную работу предложенной стратегии. Угол поворота можно регулировать в допустимых пределах, а внешние помехи в системе мостового крана могут быть успешно подавлены. Наша будущая работа будет сосредоточена на распространении предложенного метода на трехмерный мостовой кран и будет учитывать подъем и опускание полезной нагрузки во время транспортировки.
Вклад авторов
X.M. и Х.Б. задумал и спроектировал эксперименты; Х.М. провел эксперименты; Х. М. и Х.Б. проанализировали данные; Х.Б. предоставленные реагенты/материалы/инструменты анализа; Х.М. Написание-первоначальная подготовка проекта; Х.М. и Х.Б. Написание-обзор и редактирование.
М. и Х.Б. проанализировали данные; Х.Б. предоставленные реагенты/материалы/инструменты анализа; Х.М. Написание-первоначальная подготовка проекта; Х.М. и Х.Б. Написание-обзор и редактирование.
Финансирование
Данное исследование частично финансировалось Национальным научным фондом Китая [No. 51876089].
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Ссылки
- Ramli, L.; Мохамед, З .; Абдуллахи, А.М.; Джаафар, HI; Лазим, И. М. Стратегии управления крановыми системами: всесторонний обзор. Дж. Мех. Сист. Сигнал Проц. 2017 , 99, 1–23. [Google Scholar] [CrossRef]
- Коломбо, Л.; Хименес, Ф .; Диего, доктор медицинских наук Вариационные интеграторы для механических систем управления с недостаточным приводом с симметриями. Дж. Вычисл. Дин. 2017 , 2, 193–225. [Google Scholar] [CrossRef]
- Пуччи, Д.; Романо, Ф .; Нори, Ф. Совместное адаптивное управление механическими системами с недостаточным приводом. IEEE транс. Роб. 2017 , 31, 1527–1536. [Google Scholar] [CrossRef]
- Магсуди, М.Дж.; Мохамед, З .; Судин, С .; Буямин, С .; Джаафар, HI; Ахмад, С.М. Усовершенствованная схема формирования входных данных для эффективного контроля раскачивания нелинейного трехмерного мостового крана с трением. Дж. Мех. Сист. Сигнал Проц. 2017 , 92, 364–378. [Google Scholar] [CrossRef]
- Смочек, Дж.; Шпитко, Дж. Сравнение модели прогнозирования, формирования входных данных и управления с обратной связью для лабораторного мостового крана. В материалах 21-й Международной конференции по методам и моделям в автоматизации и робототехнике (MMAR), 2016 г., Мендзыздрое, Польша, 29Август – 1 сентября 2016 г. [Google Scholar]
- Кьелланд, М.Б.; Хансен, М.Р. Использование формы ввода и обратной связи по давлению для подавления колебаний при поворотном движении легкого гибкого гидравлического крана. Междунар. J. Fluid Power 2015 , 16, 141–148. [Google Scholar] [CrossRef]
- Маджид, Массачусетс; Ван, WS; Мохамад, С.; Бакар, З.А. Сравнение ПИД- и ПД-регуляторов с методом формирования входных данных для трехмерного козлового крана. В материалах конференции IEEE по системам, процессам и управлению (ICSPC), Куала-Лумпур, Малайзия, 13–15 декабря 2013 г. [Google Scholar]
- Ху, Ю.; Ву, Б.; Воан, Дж.; Сингхоз, В. Подавление колебаний энергоэффективного мостового крана с помощью формирования входных данных. В материалах 9-й Азиатской конференции по контролю 2013 г., Стамбул, Турция, 23–26 июня 2013 г. [Google Scholar]
- Hu, C.; Ван Р.; Ян, Ф .; Чадли, М .; Карими, Х. Р. Композитное нелинейное управление с обратной связью для следования по траектории четырехколесных автономных наземных транспортных средств с независимым приводом. IEEE транс. Интел. трансп. Сист. 2016 , 17, 2063–2074. [Академия Google]
- Ли, С.Г.; Ле, А.Т. ; Мун, С.К. Методы линеаризации с частичной обратной связью и скользящего режима для 2D Crane Contro. Транс. Инст. Изм. Контроль 2014 , 36, 78–87. [Google Scholar] [CrossRef]
- Хилхорст, Г.; Пайпелирс, Г.; Михилс, В .; Оливейра, RCLF; Перес, PLD; Свиверс, Дж. Линейное управление с обратной связью и переменными параметрами фиксированного порядка мостового крана лабораторного масштаба. IEEE транс. Система управления Технол. 2016 , 24, 1899–1907. [Академия Google] [CrossRef]
- Донг, штаб-квартира; Ли, С.Г.; Ба, П.Д. Двухконтурное управление с пропорционально-интегральной и частичной линеаризацией обратной связи для трехмерного козлового крана. В материалах 17-й Международной конференции по управлению, автоматизации и системам (ICCAS), Ramada Plaza, Чеджу, Корея, 18–21 октября 2017 г. [Google Scholar]
- Sun, N.; Фанг, Ю .; Чен, Х .; Он, Б. Адаптивное нелинейное управление краном с подъемом/спуском груза и неизвестными параметрами: проектирование и эксперименты. IEEE/ASME Trans. Мехатрон. 2015 , 20, 2107–2119. [Google Scholar] [CrossRef]
- Qian, Y.; Фанг, Ю .; Лу, Б. Адаптивное повторяющееся управление обучением для морского стрелового крана. Автоматика 2017 , 82, 21–28. [Google Scholar] [CrossRef]
- Чжан М.; Максимум.; Ронг, X .; Песня, Р .; Тиан, X .; Ли, Ю. Частично насыщенный адаптивный обучающийся контроллер для мостовых кранов с подъемом/опусканием полезной нагрузки и неизвестными параметрами. Нелинейная динам. 2017 , 89, 1779–1791. [Академия Google] [CrossRef]
- Смочек, Дж.; Шпытко, Дж. Многопараметрическое обобщенное прогностическое управление на основе оптимизации роя частиц для мостового крана. IEEE/ASME Trans. мех. 2017 , 22, 258–268. [Google Scholar] [CrossRef]
- Чжан М.; Максимум.; Ронг, X .; Тиан, X .; Ли, Ю. Управление отслеживанием ошибок мостовых кранов с недостаточным приводом в зависимости от произвольных начальных углов поворота полезной нагрузки. мех. Сис. Сигнал Проц. 2017 , 84, 268–285. [Google Scholar] [CrossRef]
- Ву, X.; Он, X. Нелинейное энергетическое регулирование трехмерных мостовых кранов. IEEE транс. автомат. науч. англ. 2017 , 14, 1297–1308. [Google Scholar] [CrossRef]
- Zhan, Y.; Ву, Х .; Он, Х. Управление двухконтейнерным мостовым краном. В материалах 34-й Китайской конференции по контролю 2015 г., Ханчжоу, Китай, 28–30 июля 2015 г. [Google Scholar]
- Hoang, NQ; Ли, С.Г.; Ким, Х .; Мун, С.К. Планирование траектории мостового крана путем формирования ускорения тележки. Дж. Мех. науч. Технол. 2014 , 28, 2879–2888. [Google Scholar] [CrossRef]
- Кази Ф.; Банавар, Р. Н.; Муллхаупт, П.; Бонвин, Д. Стабилизация механизма 2D-SpiderCrane с использованием управления на основе пассивного назначения демпфирования. Протокол МФБ. Том. 2008 , 41, 3155–3160. [Google Scholar] [CrossRef]
- Чва, Д. Надежное управление трехмерными мостовыми кранами, основанное на управлении режимом скольжения. IEEE транс. Инд. Электрон. 2017 , 64, 6775–6784. [Google Scholar] [CrossRef]
- Лу, Б.; Фанг, Ю .; Сан, Н. Управление режимом скольжения для мостовых кранов с недостаточным приводом, подверженных как согласованным, так и несогласованным возмущениям. Мехатроник 2017 , 47, 116–125. [Google Scholar] [CrossRef]
- Ахенак А.; Чадли, М .; Макин, Д.; Рагот, Дж. Множественный наблюдатель в скользящем режиме для обнаружения и изоляции неисправностей. В материалах 42-й конференции IEEE по управлению принятием решений, Мауи, Гавайи, США, 9–12 декабря 2003 г. [Google Scholar]
- Sun, N. ; Ву, Ю.; Фанг, Ю .; Чен, Х. Нелинейное противораскачивающее управление для крановых систем с эффектом качания двойного маятника и неопределенными параметрами: проектирование и эксперименты. IEEE транс. автомат. науч. англ. 2017 , 15, 1–10. [Google Scholar] [CrossRef]
- Аль-Дахери, Н.; Джебали, А .; Диабат, А. Генетический алгоритм, основанный на моделировании, для планирования работы причальных кранов в условиях неопределенности. Симул. Модель. Практика. Теория 2016 , 66, 122–138. [Google Scholar] [CrossRef]
- Qian, D.; Тонг, С .; Ли, С.Г. Управление полезными нагрузками на основе нечеткой логики, подвергаемое двойному маятниковому движению в мостовых кранах. автомат. Констр. 2016 , 65, 133–143. [Академия Google] [CrossRef]
- Ронг Б.; Руи, X .; Тао, Л.; Ван, Г. Динамический анализ и проектирование нечеткого управления защитой от раскачивания системы мостового крана на основе метода матрицы передачи дискретного времени Риккати. Многотельные системы. Дин. 2018 , 43, 279–295. [Google Scholar] [CrossRef]
- Ян Т.; Цю, В .; Май.; Чадли, М .; Чжан, Л.С. Прогностический контроль содержания растворенного кислорода в процессах с активным илом на основе нечеткой модели. Нейрокомпьютинг 2014 , 136, 88–95. [Академия Google] [CrossRef]
- Спонг, М. Проблема управления поворотом вверх для акробота. Система управления IEEE. 1995 , 15, 49–55. [Google Scholar]
 IEEE транс. Роб. 2017 , 31, 1527–1536. [Google Scholar] [CrossRef]
IEEE транс. Роб. 2017 , 31, 1527–1536. [Google Scholar] [CrossRef] [Google Scholar] [CrossRef]
[Google Scholar] [CrossRef]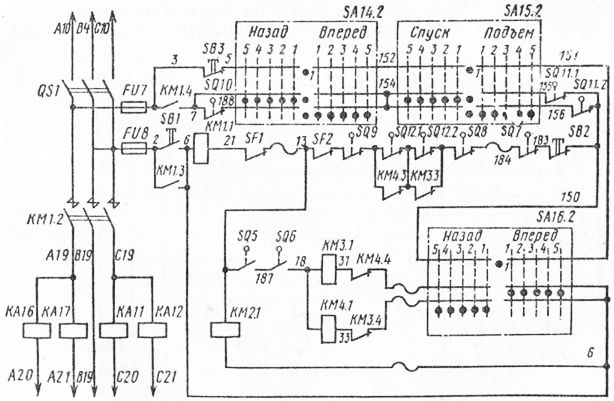 ; Мун, С.К. Методы линеаризации с частичной обратной связью и скользящего режима для 2D Crane Contro. Транс. Инст. Изм. Контроль 2014 , 36, 78–87. [Google Scholar] [CrossRef]
; Мун, С.К. Методы линеаризации с частичной обратной связью и скользящего режима для 2D Crane Contro. Транс. Инст. Изм. Контроль 2014 , 36, 78–87. [Google Scholar] [CrossRef]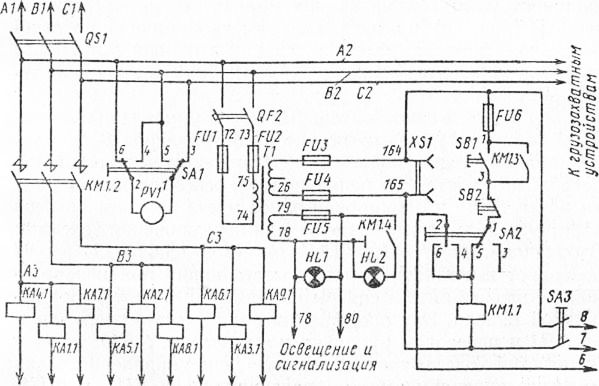 IEEE/ASME Trans. Мехатрон. 2015 , 20, 2107–2119. [Google Scholar] [CrossRef]
IEEE/ASME Trans. Мехатрон. 2015 , 20, 2107–2119. [Google Scholar] [CrossRef] мех. Сис. Сигнал Проц. 2017 , 84, 268–285. [Google Scholar] [CrossRef]
мех. Сис. Сигнал Проц. 2017 , 84, 268–285. [Google Scholar] [CrossRef] «> Ngo, QH; Нгуен, Н.П.; Нгуен, К.Н.; Тран, TH; Ха, К.П. Управление нечетким скользящим режимом морского контейнерного крана. океан инж. 2017 , 140, 125–134. [Google Scholar] [CrossRef]
«> Ngo, QH; Нгуен, Н.П.; Нгуен, К.Н.; Тран, TH; Ха, К.П. Управление нечетким скользящим режимом морского контейнерного крана. океан инж. 2017 , 140, 125–134. [Google Scholar] [CrossRef] ; Ву, Ю.; Фанг, Ю .; Чен, Х. Нелинейное противораскачивающее управление для крановых систем с эффектом качания двойного маятника и неопределенными параметрами: проектирование и эксперименты. IEEE транс. автомат. науч. англ. 2017 , 15, 1–10. [Google Scholar] [CrossRef]
; Ву, Ю.; Фанг, Ю .; Чен, Х. Нелинейное противораскачивающее управление для крановых систем с эффектом качания двойного маятника и неопределенными параметрами: проектирование и эксперименты. IEEE транс. автомат. науч. англ. 2017 , 15, 1–10. [Google Scholar] [CrossRef] Многотельные системы. Дин. 2018 , 43, 279–295. [Google Scholar] [CrossRef]
Многотельные системы. Дин. 2018 , 43, 279–295. [Google Scholar] [CrossRef] Рисунок 1.
Реальная схема крана с подъемником и грузом.
Рис. 1.
Реальная схема крана с подъемником и грузом.
Рисунок 2.
Двухмерная плоская модель мостового крана.
Рис. 2.
Двухмерная плоская модель мостового крана.
Рисунок 3.
Блок-схема предлагаемой замкнутой системы управления.
Рисунок 3.
Блок-схема предлагаемой замкнутой системы управления.
Рисунок 4.
Структура моделирования предлагаемой противораскачивающей замкнутой системы управления.