Содержание
Основные типы регуляторов | Системы электроприводов исполнительных механизмов современных буровых установок
Електроенергетика мережi, обладнання
- Деталі
- Категорія: Обладнання
- інструменти, механізми
Зміст статті
- Системы электроприводов исполнительных механизмов современных буровых установок
- Сведения о системах подчиненного управления электроприводами
- Основные типы регуляторов
- Электропривод буровых насосов
- Электропривод ротора
- Электропривод силового вертлюга
- Электропривод спускоподъемного агрегата
- Подача долота
- Технические характеристики современных моделей буровых установок
- Типовые структуры электротехнических комплексов буровых установок
Сторінка 3 із 10
Основные типы регуляторов, применяемых в системах управления электроприводами исполнительных механизмов буровых установок
Аналоговые регуляторы в системах подчиненного управления электроприводами строятся на основе операционных усилителей (ОУ) — усилителей постоянного тока с высоким входным и очень низким выходным сопротивлениями. Технология интегральных микросхем позволяет в настоящее время изготавливать высококачественные и недорогие ОУ. В некоторой части своего рабочего диапазона ОУ ведет себя как линейный усилитель напряжения с очень большим коэффициентом усиления (105— 106). Если в схеме ОУ не предусмотрена отрицательная обратная связь с выхода на вход, то из-за высокого коэффициента усиления, он обязательно попадает в режим насыщения. Поэтому схемы регулятора на базе ОУ содержат отрицательную обратную связь.
Технология интегральных микросхем позволяет в настоящее время изготавливать высококачественные и недорогие ОУ. В некоторой части своего рабочего диапазона ОУ ведет себя как линейный усилитель напряжения с очень большим коэффициентом усиления (105— 106). Если в схеме ОУ не предусмотрена отрицательная обратная связь с выхода на вход, то из-за высокого коэффициента усиления, он обязательно попадает в режим насыщения. Поэтому схемы регулятора на базе ОУ содержат отрицательную обратную связь.
Операционный усилитель получил свое название благодаря тому, что с его помощью могут выполняться различные математические операции, такие как умножение, суммирование, интегрирование и дифференцирование. Типовые регуляторы строятся на базе инвертирующего усилителя, причем входные и выходные цепи, кроме сопротивлений, могут содержать емкости.
Поскольку коэффициент усиления ОУ велик (Ку = = 105+106), а выходное напряжение Увых ограничено напряжением питания Цп, то потенциал точки А (рис. 1, а) срА = = ивых/Ку близок к нулю, т.е. точка А выполняет функцию кажущейся земли (заземлять точку А нельзя, иначе схема станет неработоспособной).
1, а) срА = = ивых/Ку близок к нулю, т.е. точка А выполняет функцию кажущейся земли (заземлять точку А нельзя, иначе схема станет неработоспособной).
Рис. 1. Структура аналогового регулятора, выполненного на операционном усилителе (а). Схема пропорционального регулятора с управляемым ограничением выходного сигнала (б). Характеристика вход-выход регулятора с управляемым ограничением выходного сигнала (в)
Схемы, передаточные функции и переходные функции регуляторов различных типов приведены в табл.
Схемы и динамические характеристики различных типов регуляторов
| Тип регулятора | Схемы регулятора | Передаточная функция регулятора | Переходная функция регулятора |
Для получения пропорционального регулятора (П-регулятора) на вход и в цепь обратной связи ОУ включают резисторы; интегрального регулятора (И-регулятора) во входную цепь включает резистор, а в цепь обратной связи — конденсатор; ПИ-регулятора во входную цепь-резистор, а в цепь обратной связи — последовательно соединенные резистор и конденсатор. ПИД-регулятор может быть выполнен на одном усилителе с помощью активно-емкостных цепей на входе и в цепи обратной связи.
ПИД-регулятор может быть выполнен на одном усилителе с помощью активно-емкостных цепей на входе и в цепи обратной связи.
Промышленностью выпускаются различные типы операционных усилителей на интегральных микросхемах (ИМС) — как круглой, так и прямоугольной формы. Наибольшее распространение для построения регуляторов получили ОУ типов К140УД7, К553УД2, К157УД2 и др.
Уменьшить размеры и повысить надежность устройств аналоговых систем управления электроприводами можно при внедрении гибридной технологии для их изготовления. При изготовлении гибридных интегральных схем (ГИС) активные элементы (ОУ) устанавливаются на печатной плате в твердотельном (бескорпусном) исполнении, а конденсаторы и резисторы — методом пленочной технологии (напылением пленок из проводящих, полупроводящих и непроводящих материалов). Полученный модуль может быть залит компаундом или помещен в корпус.
Ограничение координат электропривода (тока, скорости и др.) осуществляется включением в структуру регулятора внешнего контура регулирования узлов ограничения. Последние могут быть управляемыми и неуправляемыми. На рис., 6 приведена схема ограничения выходного напряжения пропорционального регулятора с отсекающими диодами VD1, VD2 и управляемым опорным напряжением Уоп. Схема позволяет получить несимметричную относительно начала координат характеристику вход-выход с различным уровнем ограничиваемого выходного напряжения (рис.) Возможны и другие варианты схем управляемого ограничения выходного напряжения ОУ с использованием транзисторов.
Последние могут быть управляемыми и неуправляемыми. На рис., 6 приведена схема ограничения выходного напряжения пропорционального регулятора с отсекающими диодами VD1, VD2 и управляемым опорным напряжением Уоп. Схема позволяет получить несимметричную относительно начала координат характеристику вход-выход с различным уровнем ограничиваемого выходного напряжения (рис.) Возможны и другие варианты схем управляемого ограничения выходного напряжения ОУ с использованием транзисторов.
До последнего времени в автоматизированном электроприводе исполнительных механизмов отечественных буровых установок основное применение получили средства аналоговой вычислительной техники. За последние годы рядом проектных и научно-исследовательских организаций ведутся работы по созданию микропроцессорных систем управления. По сравнению с аналоговыми системами микропроцессорные системы обладают рядом преимуществ. Отметим некоторые из них.
Гибкость. Возможность путем перепрограммирования изменения не только параметров системы управления, но и алгоритмов и даже структуры. При этом аппаратная часть системы остается неизменной. В аналоговых системах потребовалась бы перекомпоновка аппаратной части. Программное обеспечение микроЭВМ можно легко корректировать как в предпусковой период, так и в процессе их эксплуатации. Благодаря этому снижаются затраты и сроки проведения наладочных работ и изменяется их характер, поскольку необходимые эксперименты по определению характеристик и параметров, а также настройка регуляторов могут быть произведены автоматически самой микроЭВМ по заранее подготовленной программе.
При этом аппаратная часть системы остается неизменной. В аналоговых системах потребовалась бы перекомпоновка аппаратной части. Программное обеспечение микроЭВМ можно легко корректировать как в предпусковой период, так и в процессе их эксплуатации. Благодаря этому снижаются затраты и сроки проведения наладочных работ и изменяется их характер, поскольку необходимые эксперименты по определению характеристик и параметров, а также настройка регуляторов могут быть произведены автоматически самой микроЭВМ по заранее подготовленной программе.
Снятие всех ограничений на структуру управляющего устройства и законы управления. При этом показатели качества цифровых систем могут значительно превышать показатели качества управления непрерывных систем управления. Путем введения соответствующих программ могут быть реализованы сложные законы управления (оптимизация, адаптация, прогнозирование и др.), в том числе и такие, которые весьма сложно осуществить с помощью аналоговых средств. Появляется возможность решения интеллектуальных задач, обеспечивающих правильность и эффективность ведения технологических процессов. На основе микроЭВМ могут быть построены системы любых типов, включая системы с подчиненным управлением, многомерные системы с перекрестными связями и др.
На основе микроЭВМ могут быть построены системы любых типов, включая системы с подчиненным управлением, многомерные системы с перекрестными связями и др.
Самодиагностика и самотестирование цифровых управляющих устройств. Возможность проверки исправности механических узлов привода, силовых преобразователей, датчиков и другого оборудования во время технологических пауз, т.е. автоматическая диагностика состояния оборудования и раннее предупреждение аварий. Эти возможности дополняются развитыми средствами борьбы с помехами. Главное здесь — замена аналоговых линий передачи информации цифровыми, содержащими гальванические развязки, волоконно-оптические каналы, помехоустойчивые интегральные микросхемы в качестве усилителей и коммутаторов.
Более высокая точность вследствие отсутствия дрейфа нуля, характерного для аналоговых устройств. Так, цифровые системы регулирования скорости электропривода могут обеспечить повышение точности регулирования на два порядка по сравнению с аналоговыми.
Простота визуализации параметров процесса управления путем применения цифровых индикаторов, индикаторных панелей и дисплеев, организации диалогового режима обмена информацией с оператором.
Большая надежность, меньшие габариты, масса и стоимость. Высокая надежность микроЭВМ по сравнению с аналоговой техникой обеспечивается применением больших интегральных микросхем (БИС), наличием специальных систем защиты памяти, помехозащищенности и другими средствами. Благодаря высокому уровню технологии производства БИС снижаются затраты на изготовление систем управления электроприводами. Эти преимущества особо проявляются при использовании одноплатных и однокристальных ЭВМ.
- Попередня
- Наступна
- Попередня
- Наступна
Близьки публікації
- Инструкция по охране труда при выполнении монтажных работ инструментами и приспособлениями
- Механизмы
- Требование к ручному электрофицированному инструменту
- Работа с применением ручного слесарно-кузнечного инструмента
- Технологическая оснастка, инструменты, принадлежности и материалы для ремонта трансформаторов
Copyright © 2007 — 2023 Електроенергетика При цитуванні — посилання є обов`язковим (в інтернеті — активне гіперпосилання).
Наверх
Типы регуляторов тракторных двигателей
Типы регуляторов тракторных двигателей
Регуляторы, применяемые на тракторных двигателях, можно разделить:
— по методу регулирования на однорежимные (ограничительные), двухрежимные, всережимные;
— по способу создания усилия для передачи на регулирующий орган топливного насоса — на механические, гидравлические и пневматические.
Ограничительные однорежимные регуляторы применяются на карбюраторных тракторных двигателях 1МА трактора АСХТЗ-НАТИ-1ТА, пусковых двигателях ПД-10 и др. Регулятор такого типа необходим для предохранения деталей двигателя от перегрузок при повышенных числах оборотов. На дизелях однорежимные регуляторы не применяются, так как не могут обеспечить устойчивой работы на минимальных оборотах.
Двухрежимный регулятор в отечественной практике применялся на опытных образцах тракторных дизелей, им укомплектовывался топливный насос ККАЗ (Куйбышевского карбюраторно-арматурного завода).
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
При применении всережимного регулирования регулятор воздействует на подачу топлива насосом на всем диапазоне скоростного режима от минимальных до максимальных оборотов холостого хода.
Сельскохозяйственные тракторы всех тяговых классов агрегатируются с большим количеством разнообразных сельскохозяйственных машин. Агротехнические требования при выполнении необходимых работ определяют технологические скорости движения тракторного агрегата, отклонения от которых в значительных размерах нежелательны, так как приводят к экономически невыгодному режиму работы.
В связи с тем, что выпускаемые тракторы еще не оборудованы бесступенчатыми трансмиссиями, с помощью которых можно устанавливать любую необходимую скорость движения, она достигается путем изменения числа оборотов двигателя в сочетании с установкой близкой к требуемой скорости в коробке передач. Для этого необходимо применение всережимного метода регулирования, осуществляемого с помощью всережимного регулятора, устанавливаемого на топливный насос.
Рис. 1. Схема всережимного механического регулятора:
а — с непосредственным воздействием на пружину; б — с косвенным воздействием на пружину
При установившемся числе оборотов силы, действующие на муфту, находятся в равновесии. Положение рычага управления определяет величину предварительного натяжения пружины и тем самым скоростной режим работы регулятора. Водитель непосредственно на положение органа изменения подачи топлива не воздействует. Изменение натяжения пружины приводи’? к тому, что равновесное положение муфты получается при другом числе оборотов. Максимальный скоростной режим двигателя определяется максимальным натяжением пружины. Минимальный скоростной режим может определяться положением рычага управления, устанавливаемым водителем по минимальному устойчивому скоростному режиму.
Частичные характеристики двигателя определяются величиной предварительной затяжки пружины регулятора. Каждому положению рычага управления соответствует своя частичная характеристика. По этой схеме выполнены регуляторы, устанавливаемые на топливные насосы УТН, НД и регулятор двигателя Д-100М.
По этой схеме выполнены регуляторы, устанавливаемые на топливные насосы УТН, НД и регулятор двигателя Д-100М.
Одним из недостатков такой схемы всережим-ного механического регулятора является то, что водитель все время уравновешивает усилие пружины. Так как на повышенных скоростных режимах усилие велико, это затрудняет работу водителя или усложняет создание устройств, фиксирующих положение акселератора, управляемого вручную.
Этот недостаток устраняется в схеме всере-жимного механического регулятора, в котором задается водителем косвенным путем величина предварительной затяжки пружины регулятора, при которой он начинает действовать. Принципиальная схема такого регулятора показана на рис. 1, б. Применяется он на топливных насосах типа TH. Изменение скоростного режима работы двигателя осуществляется путем воздействия водителя на рычаг управления, движение которого передается шарниру рычага. Так как перемещение короткого конца рычага связано с преодолением дополнительного усилия пружины или избыточной инерционной силы грузов, которые относительно велики, этот конец временно остается неподвижным и перемещение шарнира передается через верхний конец рычага органу управления подачей топлива. Изменение подачи топлива нарушает баланс энергии машины и приводит к увеличению числа оборотов. Последнее вызывает постепенное изменение инерционной силы грузов и их перемещение, которое через муфту регулятора и нижний конец рычага при неподвижном шарнире передается верхнему концу рычага и органу управления подачей топлива. Перемещение грузов и органов управления подачей продолжается до тех пор, пока не восстановится равновесие инерционных сил грузов и усилия пружины на новом скоростном режиме.
Изменение подачи топлива нарушает баланс энергии машины и приводит к увеличению числа оборотов. Последнее вызывает постепенное изменение инерционной силы грузов и их перемещение, которое через муфту регулятора и нижний конец рычага при неподвижном шарнире передается верхнему концу рычага и органу управления подачей топлива. Перемещение грузов и органов управления подачей продолжается до тех пор, пока не восстановится равновесие инерционных сил грузов и усилия пружины на новом скоростном режиме.
При этой схеме регулятора водителю приходится преодолевать приведенные усилия сопротивления перемещению органа изменения подачи топлива и механизма, связывающего его с рычагом управления.
Регулятор изменяет величину подачи топлива в определенном диапазоне оборотов.
Наиболее распространенными регуляторами в тракторных двигателях являются всережимные механические. Однако они обладают рядом недостатков.
Одним из недостатков всережимных регуляторов является то, что с понижением оборотов энергия регулятора быстро уменьшается, в то время как усилие, необходимое для перемещения рейки насоса, с понижением оборотов возрастает. Такое протекание характеристик приводит к тому, что по мере уменьшения числа оборотов степень нечувствительности регулятора сильно возрастает, и для получения устойчивых минимальных оборотов необходимо применять такой регулятор, у которого на номинальном скоростном режиме энергия регулятора значительно превосходит потребную для получения устойчивой работы.
Такое протекание характеристик приводит к тому, что по мере уменьшения числа оборотов степень нечувствительности регулятора сильно возрастает, и для получения устойчивых минимальных оборотов необходимо применять такой регулятор, у которого на номинальном скоростном режиме энергия регулятора значительно превосходит потребную для получения устойчивой работы.
При однопружинном механическом регуляторе по мере уменьшения регулируемого скоростного режима (частичные режимы) степень неравномерности регулирования значительно возрастает. При исходной степени неравномерности на номинальном режиме около 8% степень неравномерности на режиме 0,4 номинального увеличивается до 50%. Этот недостаток регулятора можно устранить применением нескольких пружин, последовательно включающихся в работу, или изменением кинематики управления регулятором, обеспечивающей изменения приведенной жесткости пружины регулятора.
Наряду с механическими всережимными регуляторами получили применение всережимные пневматические регуляторы.
Работа регулятора основана на использовании зависимости между величиной разряжения во впускном коллекторе двигателя и числом оборотов коленчатого вала двигателя. Во впускном коллекторе двигателя устанавливается патрубок Вентури. Положение дроссельной заслонки, расположенной в патрубке, определяется водителем. При изменении числа оборотов двигателя и определенном положении дроссельной заслонки скорость потока воздуха в патрубке Вентури меняется, в результате его меняется величина разрежения в горловине патрубка.
Корпус регулятора разделен диафрагмой на две камеры: левую и правую. Левая камера сообщена с патрубком Вентури при помощи трубопровода, а правая камера — через отверстия сообщена с атмосферой. Диафрагма нагружена пружиной и связана с рейкой топливного насоса.
Увеличение числа оборотов двигателя увеличивает разрежение в камере регулятора, в результате чего атмосферное давление через диафрагму регулятора сжимает пружину. При этом происходит перемещение рейки насоса в сторону уменьшения подачи. При уменьшении числа оборотов диафрагма под действием пружины перемещается,передвигая связанную с ней рейку в сторону увеличения подачи топлива.
При уменьшении числа оборотов диафрагма под действием пружины перемещается,передвигая связанную с ней рейку в сторону увеличения подачи топлива.
Поворачивая дроссельную заслонку при любом числе оборотов, можно увеличить разрежение в камере регулятора до такой величины, при которой регулятор начинает работать. Этим обеспечивается всережимность пневматического регулятора. Устанавливая дроссельную заслонку в определенное положение, мы можем задавать желаемый скоростной режим работы.
Степень неравномерности регулирования у пневматического регулятора практически остается неизменной на всем диапазоне регулирования скоростного режима.
Второй особенностью пневматического регулятора является независимость энергии регулятора от скоростного режима работы.
Система регулирования с пневматическим регулятором имеет два основных недостатка: для повышения энергии регулятора необходимо искусственное увеличение вакуума во впускной системе двигателя; изменение сопротивления во впускной системе (засорение воздухоочистителя) меняет регулировку начала действия регуляторов.
Третьим принципиальным типом регулятора, получившим применение на тракторных двигателях, является гидравлический регулятор.
В нем перестановочная сила создается за счет избыточного давления, образуемого топливоподкачивающим насосом. Зависимость величины избыточного давления от числа оборотов выражается уравнением квадратичной параболы.
В зависимости величины энергии регулятора от числа оборотов для пневматического и гидравлического регуляторов имеется полная идентичность, поэтому и основные свойства этих регуляторов одинаковы.
Основным недостатком простого гидравлического регулятора является влияние вязкости рабочей жидкости регулятора на устанавливаемый скоростной режим. А так как вязкость значительно изменяется от температуры, то по мере прогрева двигателя или изменения его теплового состояния изменяется также и установленный скоростной режим.
Что такое регулятор давления и разница между различными типами?
Регуляторы давления бывают различных форм. Точность и стабильность достигнутого регулируемого давления могут сильно различаться в зависимости от типа и конструкции каждого из них. При поиске подходящего регулятора для конкретного применения следует учитывать форму, точность и стабильность. Ниже приводится краткое объяснение того, что такое регуляторы давления и чем они отличаются по сложности.
Точность и стабильность достигнутого регулируемого давления могут сильно различаться в зависимости от типа и конструкции каждого из них. При поиске подходящего регулятора для конкретного применения следует учитывать форму, точность и стабильность. Ниже приводится краткое объяснение того, что такое регуляторы давления и чем они отличаются по сложности.
Что такое регулятор давления?
Регуляторы давления — это механические клапаны, которые используют обратную связь для управления давлением как в пневматических, так и в гидравлических системах. В основном существует два типа регуляторов: один регулирует давление на входе (регуляторы обратного давления), а другой регулирует давление на выходе (редукторы давления). Давление обычно содержится в системе, в которой жидкость течет из одного места в другое по трубам в резервуары для хранения или сосуды под давлением. Регулятор используется для регулировки давления на входе или выходе из точки, где регулятор был вставлен в систему.
Они могут быть как простыми клапанами с ручным управлением, так и сложной автоматизированной точной системой с датчиком давления в контуре обратной связи. Обратная связь исходит от регулируемого давления, и эта обратная связь управляет выходным сигналом регулятора либо механически, либо электронным способом. Механическая обратная связь осуществляется с помощью подпружиненной или управляемой давлением диафрагмы, сильфона или поршня, который управляет клапаном, увеличивающим или уменьшающим поток через регулятор в зависимости от регулируемого давления. Это механическое регулирование потока действует для контроля давления. В электронном регуляторе вход от датчика давления используется для регулировки клапана или клапанов, которые контролируют давление.
В этом посте мы сосредоточимся на редукционных регуляторах. Эти регуляторы снижают относительно высокое входное давление до более низкого выходного давления, чтобы защитить чувствительные компоненты на выходе или точно контролировать чувствительный к давлению процесс или измерение.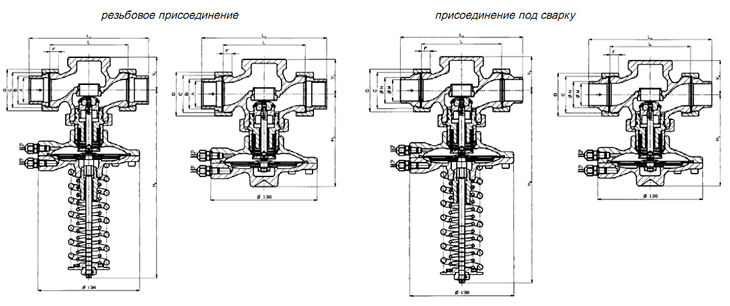 Гидродинамика — сложный предмет, говорящий нам о том, что жидкость, протекающая через ограничение, теряет энергию; редукционные регуляторы используют это свойство для регулирования давления. Давление в любой системе определяется как сила, приходящаяся на единицу площади внутри этой замкнутой системы. На давление влияет количество присутствующей жидкости (количество молекул), объем, в котором она содержится, и температура жидкости. Большинство регуляторов давления работают, чтобы контролировать количество молекул, которым разрешено входить (или выходить) из системы и, таким образом, контролировать давление в системе. Другой тип, кратко обсуждаемый ниже, представляет собой регулятор, который регулирует давление за счет увеличения силы, прикладываемой к закрытой системе.
Гидродинамика — сложный предмет, говорящий нам о том, что жидкость, протекающая через ограничение, теряет энергию; редукционные регуляторы используют это свойство для регулирования давления. Давление в любой системе определяется как сила, приходящаяся на единицу площади внутри этой замкнутой системы. На давление влияет количество присутствующей жидкости (количество молекул), объем, в котором она содержится, и температура жидкости. Большинство регуляторов давления работают, чтобы контролировать количество молекул, которым разрешено входить (или выходить) из системы и, таким образом, контролировать давление в системе. Другой тип, кратко обсуждаемый ниже, представляет собой регулятор, который регулирует давление за счет увеличения силы, прикладываемой к закрытой системе.
Какие существуют типы регуляторов давления?
В классификации и понимании типов регуляторов можно провести различие между механическими «промышленными регуляторами» и электронными «прецизионными регуляторами давления», которые также называются «прецизионными регуляторами давления». Последний обычно используется в прецизионных калибраторах давления. В любом случае достигается одна и та же цель регулирования давления, и единственная разница заключается в достигнутой степени точности и стабильности. Для целей данного обсуждения мы проведем это различие следующим образом:
Последний обычно используется в прецизионных калибраторах давления. В любом случае достигается одна и та же цель регулирования давления, и единственная разница заключается в достигнутой степени точности и стабильности. Для целей данного обсуждения мы проведем это различие следующим образом:
Промышленное регулирование давления
Промышленный редукционный регулятор давления включает в себя клапан, который управляется подпружиненной диафрагмой, сильфоном или поршнем. Давление ниже по потоку толкает диафрагму или поршень таким образом, что разрешает или ограничивает поток через клапан от стороны вверх по потоку к стороне выхода клапана. Натяжение пружины можно регулировать таким образом, чтобы выходное давление поддерживало заданное давление настройки. Изменения давления на выходе автоматически регулируют клапан, позволяя или ограничивая поток жидкости для достижения заданного значения. Эти промышленные регуляторы давления бывают разных конфигураций, в зависимости от производителя. Они являются предпочтительным выбором в промышленных условиях, потому что они надежны и саморегулируются, что позволяет использовать давление системы без необходимости подачи питания или внешних чувствительных элементов. Их можно установить, оставить в покое, а точность регулирования давления достаточна для большинства применений. Варианты этой конструкции могут использовать два клапана, чтобы обеспечить надлежащее регулирование в любых условиях.
Они являются предпочтительным выбором в промышленных условиях, потому что они надежны и саморегулируются, что позволяет использовать давление системы без необходимости подачи питания или внешних чувствительных элементов. Их можно установить, оставить в покое, а точность регулирования давления достаточна для большинства применений. Варианты этой конструкции могут использовать два клапана, чтобы обеспечить надлежащее регулирование в любых условиях.
Прецизионное регулирование давления
Регуляторы электромагнитного клапана
Другой метод регулирования давления, часто используемый в прецизионных регуляторах давления в калибровочных лабораториях, использует впускные электромагнитные (электромеханические) клапаны, которые позволяют входному давлению поступать в систему. и выпускные электромагнитные клапаны для выпуска до атмосферного давления или вакуума. Нижняя часть системы управляется путем добавления или вычитания молекул газа. Обратная связь от датчика давления ниже по потоку измеряется и обрабатывается с использованием алгоритма управления, который открывает и закрывает электромагнитные клапаны для получения желаемой уставки давления ниже по потоку от клапанов. Для достижения очень точного регулируемого давления можно использовать несколько впускных/выпускных клапанов в тандеме с отверстиями от мелких до крупных, которые можно открывать или закрывать в зависимости от разницы между заданным значением и давлением на выходе и/или скорости, с которой давление приближается к заданному значению. В этом типе регулятора может быть достигнуто чрезвычайно точное давление. На срок службы этих электромагнитных клапанов влияет перепад давления на клапане. Именно по этой причине Mensor использует запатентованную систему, которая поддерживает номинальный дифференциал на этих клапанах, чтобы увеличить их срок службы. И Mensor CPC4000, и CPC6050 используют эту технологию, чтобы обеспечить многолетнюю работу с минимальным отказом соленоида.
Обратная связь от датчика давления ниже по потоку измеряется и обрабатывается с использованием алгоритма управления, который открывает и закрывает электромагнитные клапаны для получения желаемой уставки давления ниже по потоку от клапанов. Для достижения очень точного регулируемого давления можно использовать несколько впускных/выпускных клапанов в тандеме с отверстиями от мелких до крупных, которые можно открывать или закрывать в зависимости от разницы между заданным значением и давлением на выходе и/или скорости, с которой давление приближается к заданному значению. В этом типе регулятора может быть достигнуто чрезвычайно точное давление. На срок службы этих электромагнитных клапанов влияет перепад давления на клапане. Именно по этой причине Mensor использует запатентованную систему, которая поддерживает номинальный дифференциал на этих клапанах, чтобы увеличить их срок службы. И Mensor CPC4000, и CPC6050 используют эту технологию, чтобы обеспечить многолетнюю работу с минимальным отказом соленоида. Электромагнитные клапаны используются в различных приложениях и часто используются в системах точного управления. Они также относительно дешевы , чем их аналог с игольчатым клапаном.
Электромагнитные клапаны используются в различных приложениях и часто используются в системах точного управления. Они также относительно дешевы , чем их аналог с игольчатым клапаном.
Регуляторы игольчатых клапанов
В другом методе регулирования используются два точно обработанных игольчатых клапана, изготовленных из прочного керамического материала, с небольшим портом и резьбовым игольчатым плунжером. Один клапан подает давление, а другой сбрасывает давление из контролируемой системы, расположенной ниже по потоку. Клапаны предназначены для достижения как быстрого, так и точного управления. Модуляция клапана управляется с помощью алгоритма, который постоянно отслеживает разницу между давлением на выходе, заданным значением и скоростью, с которой давление приближается к заданному значению. Алгоритм управляет игольчатыми клапанами для достижения точного линейного изменения заданного значения и постоянной стабильности. Этот тип регулятора обеспечивает высокую степень стабильности выходного давления, на которое могут повлиять изменения температуры в системе или любые колебания ниже по потоку. Mensor CPC8000 использует этот метод, который позволяет продукту обеспечивать точное и стабильное управление при давлении до 6000 фунтов на квадратный дюйм.
Mensor CPC8000 использует этот метод, который позволяет продукту обеспечивать точное и стабильное управление при давлении до 6000 фунтов на квадратный дюйм.
Регуляторы с поршневым приводом
Регуляторы с поршневым приводом, обычно используемые в гидравлических системах, работают аналогично грузопоршневым манометрам путем приложения силы к площади поперечного сечения поршня внутри цилиндра. Давление равно силе, деленной на площадь поршня, что является определением давления, P=F/A. Чем больше приложенная сила, тем больше давление. Mensor CPC8000-H использует этот метод для точного контроля давления до 23 000 фунтов на квадратный дюйм. Преимуществом этого типа регулятора является его способность достигать очень высокого давления, что достигается за счет уменьшения площади поперечного сечения поршня.
Заключение
Существует множество типов регуляторов. Термин «регулятор» используется во всем диапазоне от грубого до точного регулирования давления.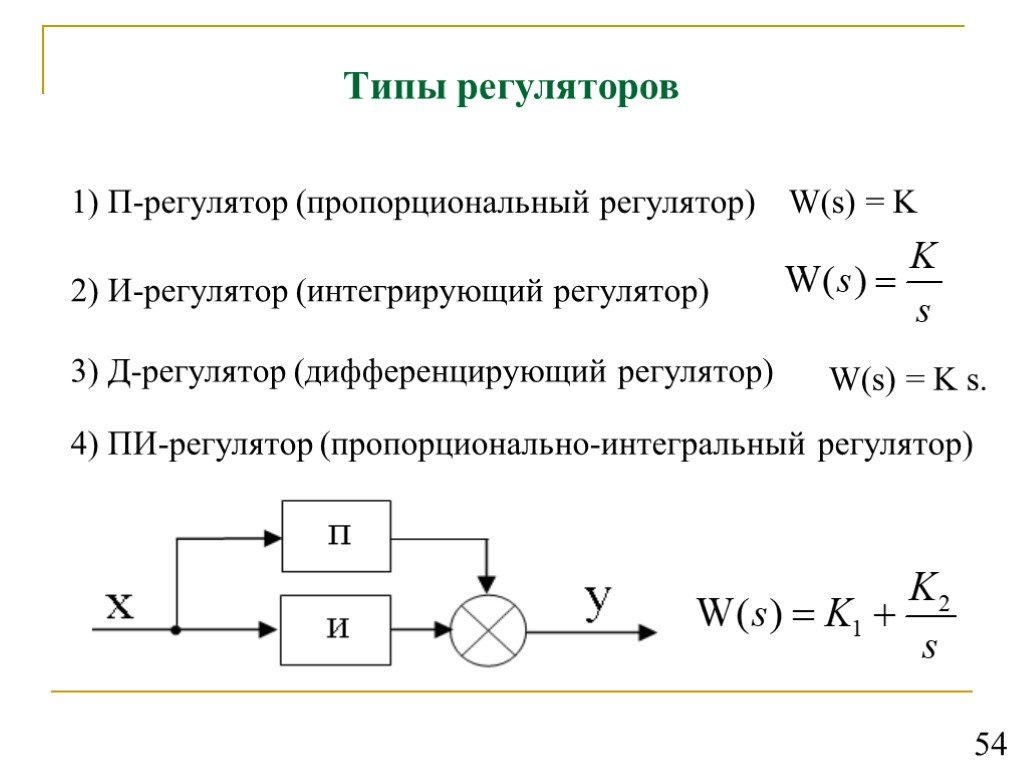 В калибровочных лабораториях компоненты, обеспечивающие точное регулирование давления, иногда называют регуляторами давления или калибраторами. Эти прецизионные регуляторы давления полагаются на высокоточные датчики давления и алгоритмы управления для регулировки давления до желаемых уставок и поддержания стабильного управления для калибровки других компонентов, чувствительных к давлению.
В калибровочных лабораториях компоненты, обеспечивающие точное регулирование давления, иногда называют регуляторами давления или калибраторами. Эти прецизионные регуляторы давления полагаются на высокоточные датчики давления и алгоритмы управления для регулировки давления до желаемых уставок и поддержания стабильного управления для калибровки других компонентов, чувствительных к давлению.
Прочтите по теме:
- Как выбрать регулятор давления: пять вещей, которые следует учитывать
- Какова реальная стоимость владения автоматическим калибратором давления?
- Важность модульности калибраторов и контроллеров давления
- Понимание важности стабильности управления
- Проверка герметичности: выявление утечек в пневматических калибровочных системах
Выбор подходящих типов регуляторов давления для вашего применения
Если вы управляете промышленной жидкостной системой, вы знаете, что поддержание точных условий процесса часто является обязательным условием работы. Давление представляет собой одно из наиболее важных условий, и для поддержания желаемого уровня давления в вашей системе требуется подходящий тип промышленного регулятора давления.
Давление представляет собой одно из наиболее важных условий, и для поддержания желаемого уровня давления в вашей системе требуется подходящий тип промышленного регулятора давления.
У вашей системы и приложения есть особые потребности, и существует широкий выбор регуляторов. Как вы можете быть уверены, что выбираете правильный тип регулятора для своего приложения? Продолжайте читать, чтобы узнать больше о конкретных типах регуляторов и ключевых функциях, на которые следует обращать внимание.
Изучение основ выбора регулятора
Промышленные регуляторы давления обычно можно разделить на две категории: редукционные регуляторы и регуляторы противодавления. Узнайте о различных функциях этих типов регуляторов и о том, как они работают, в нашем блоге «Как выбрать регулятор».
Узнайте больше о том, как выбрать регулятор
Применение: аналитические приборы
В чувствительных аналитических приложениях необходимо поддерживать точную стабильность целевого давления. Для этого требуется регулятор, рассчитанный на аналитическую точность.
Для этого требуется регулятор, рассчитанный на аналитическую точность.
Специализированные одно- и двухступенчатые подпружиненные аналитические и контрольно-измерительные регуляторы помогают пользователям доверять результатам испытаний и поддерживать предсказуемые выходные параметры процесса за счет последовательного контроля давления. Эти типы регуляторов обычно подпружинены и доступны как в конструкции с противодавлением, так и в конструкции с редукцией давления. Они также должны быть чувствительными к регулировке, позволяя операторам достигать необходимого давления с минимальными усилиями.
Некоторые функции, на которые стоит обратить внимание, включают:
- Мелкая резьба на стержне управляющей пружины. Это помогает обеспечить точную регулировку с низким крутящим моментом.
- Различные варианты сенсорного механизма для различных давлений. Мембранные модели хорошо работают в приложениях с более низкими требованиями к давлению на выходе, тогда как модели с поршневыми датчиками имеют более высокие диапазоны выходного давления для приложений, требующих контроля высокого давления.

- Тарелки, предназначенные для сопротивления колебаниям, вызванным вибрацией системы
- Большие диафрагмы для точного контроля низкого давления
Применение: общепромышленные процессы
Общепромышленные процессы требуют высоконадежного контроля давления для наилучшей защиты сотрудников, оборудования и качества продукции процесса. В некоторых случаях компоненты в этих приложениях также должны выдерживать сложные условия эксплуатации.
Высококачественные регуляторы, разработанные для общепромышленных процессов, могут обеспечить надежную работу. Обычно они имеют больший диаметр, чем регуляторы для аналитических приборов, поскольку их необходимо использовать в более крупных технологических линиях. При выборе регулятора процесса обращайте внимание на такие характеристики, как:
- Доступны конфигурации с купольной, пружинной или комбинированной нагрузкой в соответствии с вашим конкретным приложением. Как упоминалось выше, подпружиненные варианты обеспечивают точную и легкую регулировку. Варианты с купольной нагрузкой, напротив, хороши для приложений с различными вариантами потока и могут лучше минимизировать падение.
- Внутренние уплотнения из материалов, совместимых с химическими веществами и давлением, используемыми в вашей системе
- Корпуса регуляторов изготовлены из коррозионно-стойких материалов, таких как нержавеющая сталь 316L, которые могут увеличить срок службы компонентов в суровых условиях эксплуатации
 Варианты с купольной нагрузкой, напротив, хороши для приложений с различными вариантами потока и могут лучше минимизировать падение.
Варианты с купольной нагрузкой, напротив, хороши для приложений с различными вариантами потока и могут лучше минимизировать падение.Применение: Высокая чистота, высокая скорость потока
Некоторые специализированные области применения (например, полупроводниковые процессы) требуют высокого уровня чистоты процесса и высокой скорости потока. Специализированные высокочистые регуляторы высокого расхода являются хорошим вариантом для последовательного контроля давления в таких ситуациях.
Эти регуляторы могут быть доступны в различных конфигурациях, и правильный выбор для вас может зависеть от того, насколько вам нужно регулировать давление, а не просто поддерживать постоянное заданное давление. Например, ручные версии с нагрузочными пружинами, которые взаимодействуют с датчиками давления, могут быть отрегулированы, в то время как другие версии могут быть предварительно настроены на определенное давление или оснащены купольными датчиками давления с газовым приводом, которые лучше соответствуют другим требованиям к давлению на выходе. При выборе высокочистого регулятора с высоким расходом обращайте внимание на следующие характеристики:
Например, ручные версии с нагрузочными пружинами, которые взаимодействуют с датчиками давления, могут быть отрегулированы, в то время как другие версии могут быть предварительно настроены на определенное давление или оснащены купольными датчиками давления с газовым приводом, которые лучше соответствуют другим требованиям к давлению на выходе. При выборе высокочистого регулятора с высоким расходом обращайте внимание на следующие характеристики:
- Компактная конструкция, позволяющая размещать компоненты системы и технологические линии на близком расстоянии друг от друга, если пространство в ваших системах с высоким расходом ограничено. Версии с газовым приводом могут быть в два раза меньше обычных регуляторов давления с мембранным приводом.
- Цельносварная конструкция тарельчатого клапана, исключающая контакт уплотнений с атмосферой, что обеспечивает чистоту работы и герметичность
- Отделки и составы кузова, сводящие к минимуму возможность загрязнения
- Самоцентрирующиеся тарелки, помогающие свести к минимуму проскальзывание и обеспечивающие герметичное отключение
Применение: отбор проб чувствительных сред
При отборе проб определенных чувствительных или летучих технологических газов или жидкостей требуется предварительный нагрев или испарение пробы, чтобы предотвратить конденсацию и сохранить репрезентативность.
В этих случаях испарительный редукционный регулятор давления может обеспечить некоторые эксплуатационные преимущества. Эти регуляторы реагируют на изменения действий оператора, температуры окружающей среды и других условий эксплуатации, обеспечивая стабильную и надежную работу систем. В зависимости от вашего применения функции испарительного регулятора, на которые следует обратить внимание, могут включать:
- Электронное управление, которое может переопределять настройки температуры для предотвращения превышения максимальной температуры технологической жидкости, предотвращая перегрев регулятора без прекращения испарения
- Низкие внутренние объемы
- Возможность размещения изменений фазы образца
- Сертификация для использования в критических и опасных условиях, если требуется
Применение: газораспределительные системы
Газораспределительные системы требуют непрерывного снабжения для бесперебойной работы. Включение автоматического переключения между двумя источниками газа, если один источник газа исчерпан, является хорошим способом добиться этого.
Включение автоматического переключения между двумя источниками газа, если один источник газа исчерпан, является хорошим способом добиться этого.
Регуляторы переключения газовых баллонов могут обеспечить эту важную функцию, обеспечивая плавное переключение между источниками подачи газа для обеспечения непрерывного потока. Этот тип регулятора может помочь сократить дорогостоящее время простоя системы и трудоемкое техническое обслуживание. Дополнительные полезные функции, которые следует искать в регуляторах КИПиА, могут включать:
- Гофрированные неперфорированные диафрагмы, обеспечивающие прочность, долговечность и улучшенную реакцию на давление
- Мембранные уплотнения металл-металл на всех ступенях, обеспечивающие улучшенную совместимость материалов и герметичность
- Конструкции, требующие минимального обслуживания, позволяющие пользователям доверять системам распределения газа, чтобы они работали должным образом
Применение: хранение опасных жидкостей и газов
При хранении опасных жидкостей или газов критически важно обеспечить наилучшую защиту операторов и окружающих. Специализированные регуляторы газовой подушки в резервуаре могут помочь поддерживать желаемое давление инертных газов, вводимых в паровое пространство резервуара, для поддержания безопасного и постоянного давления в резервуаре и предотвращения утечки опасных паров.
Специализированные регуляторы газовой подушки в резервуаре могут помочь поддерживать желаемое давление инертных газов, вводимых в паровое пространство резервуара, для поддержания безопасного и постоянного давления в резервуаре и предотвращения утечки опасных паров.
При выборе регулятора подушки резервуара обращайте внимание на следующие характеристики:
- Резьба с мелким шагом на пружинах установочного давления для улучшения регулируемости и разрешения при настройке или регулировке давления
- Чувствительные мембранные датчики, разработанные для высокой точности обнаружения изменений выходного давления
- Компоненты регулятора, такие как корпуса, седла, тарелки и трубки обратной связи, изготовленные из коррозионно-стойких сплавов, в зависимости от условий эксплуатации
Узнайте больше о том, как конструкция регулятора и правильный выбор могут повлиять на его характеристики.
Теперь, когда вы знаете, как подобрать определенные типы регуляторов для их предполагаемого применения, надеюсь, вы почувствуете себя лучше, чтобы выбрать регуляторы, наиболее подходящие для ваших уникальных эксплуатационных потребностей.