Содержание
Регулирование скорости вращения коллекторного двигателя постоянного тока
Двигатели постоянного тока и мотор-редукторы, созданные на их основе, нуждаются в надежной системе управления скоростью вращения вала. Простым и удобным методом решения проблемы является применение широтно-импульсной модуляции (ШИМ). Способ основан на преобразовании постоянного напряжения в импульсное. При этом управление частотой вращения осуществляют путем изменения длительности подающегося импульса.
Например, по такому же принципу используют ШИМ схему в осветительных приборах для регулировки яркости свечения светодиодных ламп. Так как у светодиода небольшое время затухания частота работы устройства регулирования имеет большое значение. Качественные приборы должны полностью исключать мерцание при пониженной яркости свечения.
Управление двигателями постоянного тока методом ШИМ стало возможным благодаря силе инерции. После прекращения подачи напряжения на обмотки вал электродвигателя останавливается не сразу, продолжая движение по инерции. Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Применение устройства управления для двигателя постоянного тока
Этот метод управления двигателем постоянного тока позволяет плавно изменять скорость вращения вала в широких пределах. ШИМ делает возможным изменение параметров работы двигателя в автоматическом режиме в соответствии с установленными данными. Необходимую информацию регулятор оборотов коллекторного двигателя получает от пользователя или специального датчика, который определяет, температуру, скорость вращения или любой другой параметр. Например, в воздушных системах охлаждения регулятор оборотов изменяет скорость вращения вентилятора на основе данных, полученных от датчика температуры. Это позволяет автоматически замедлять скорость потока воздуха при низкой температуре и увеличивать при высокой.
Схема управления коллекторным двигателем постоянного тока
Простую схему управления
двигателем постоянного тока можно собирать из полевого транзистора. Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициентом заполнения, который равен обратной величие скважности. Коэффициент заполнения равен отношению продолжительности импульса к периоду его подачи. Скорость движения вала двигателя будет пропорциональна значению коэффициента заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантировать плавное регулирование и стабильную работу частота должна превышать сотни герц.
Оптимальные значения частоты ШИМ сигнала
Частота может варьироваться в широких пределах от нескольких десятков до нескольких сотен герц. Благодаря емкостной нагрузке происходит сглаживание импульсов. В итоге на двигатель подается «постоянное» напряжение средней величины в зависимости от параметров управляющей системы. Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Сложности при ШИМ регулировании скорости двигателя постоянного тока
ШИМ является популярным методом регулирования аналоговым напряжением в различных схемах. При использовании этого способа регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря. Когда подключают регулятор, начинает происходить отключение и включение питание с определенной частотой. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ регулированием двигателя должны быть тщательно продуманы и проработаны.
Также причиной нестабильной работы электродвигателя может стать факт влияния силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения. Проблемы могут возникнуть при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжение вращает ротор со скоростью 10об/сек. Чтобы понизить скорость до 1 об/сек недостаточно просто снизить напряжение до 1В. Подобрать подходящее значение подаваемого напряжения сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильно подобранной частоте и длительности подаваемых импульсов можно сделать вращение более стабильным. Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Реализация ШИМ
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ. Но иногда доступных каналов оказывается недостаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
- В начале каждого импульса ставим единицу и ждем повышения значения до заданного уровня.
- Сбрасываем линию на ноль.
Длительность импульса легче отследить с определенной периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от максимального значения. Прежде всего необходимо определиться с частотой импульсов и количеств ступеней регулирования. Далее, умножают полученные значения. Результат произведения даст необходимую частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или количество ступеней регулирования и путем расчетов находят необходимую частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя предлагаем статью «Управление коллекторным двигателем постоянного тока методом ШИМ»
| Регулирование скорости вращения двигателей постоянного тока
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т.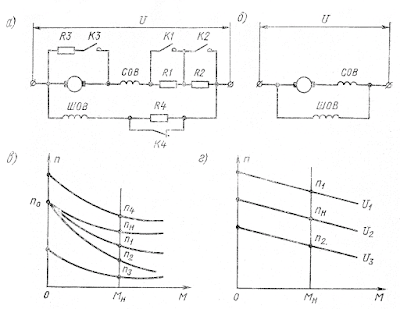 е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
где K’=KC’
т.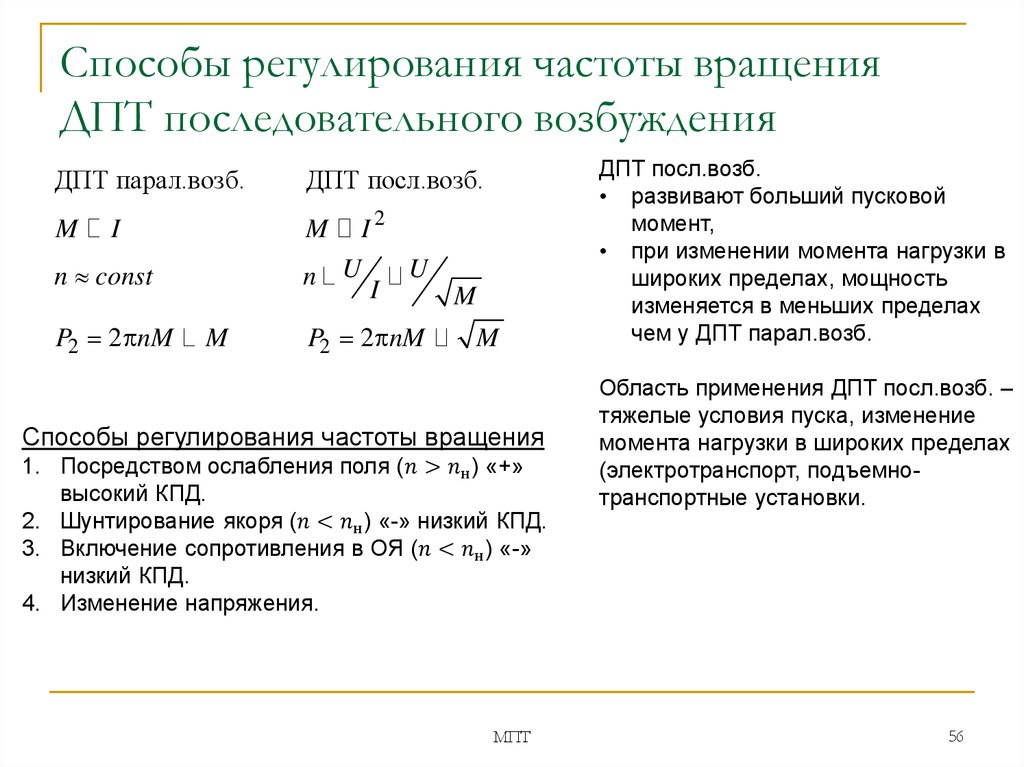 е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения.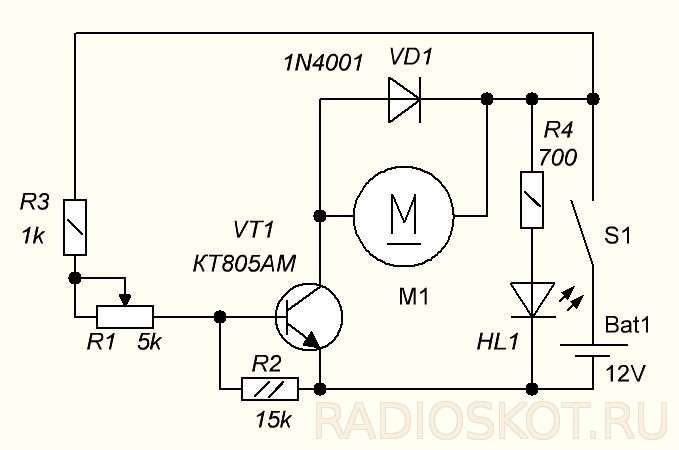 При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
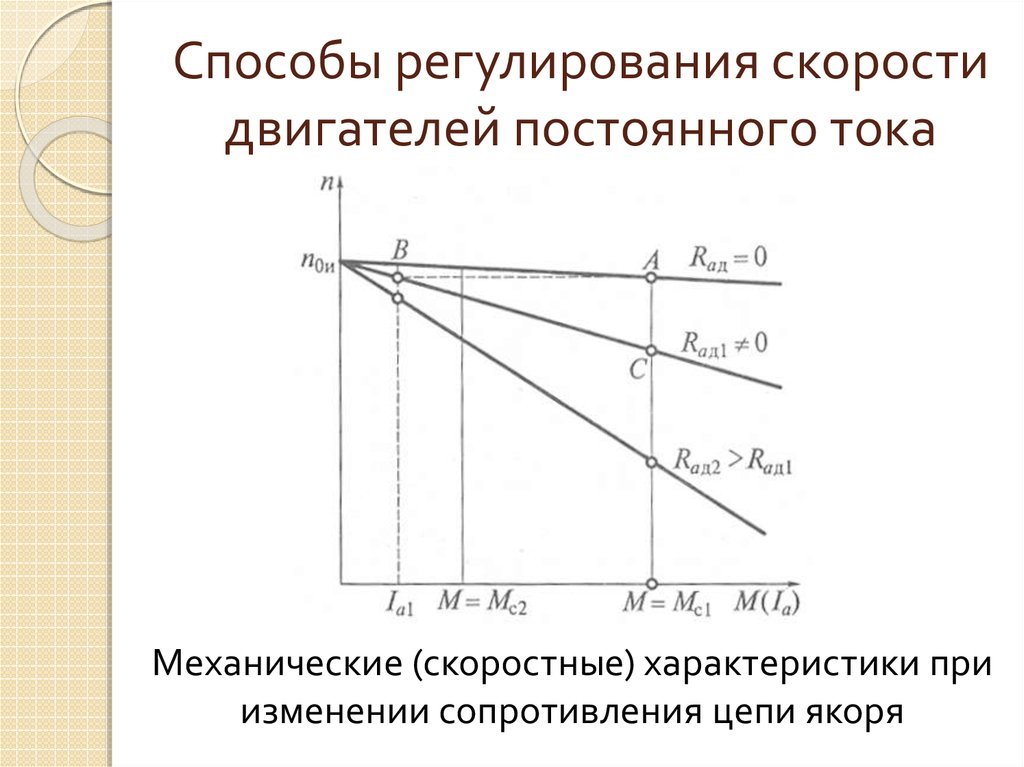
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.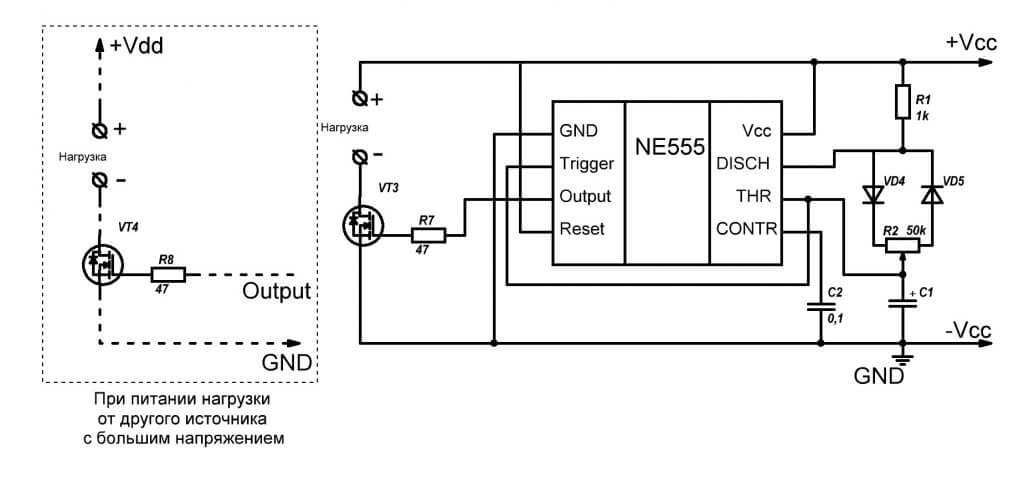
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
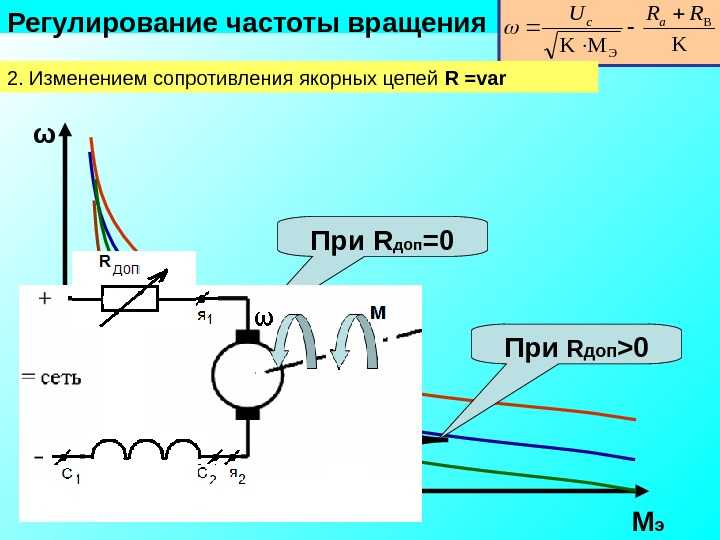
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
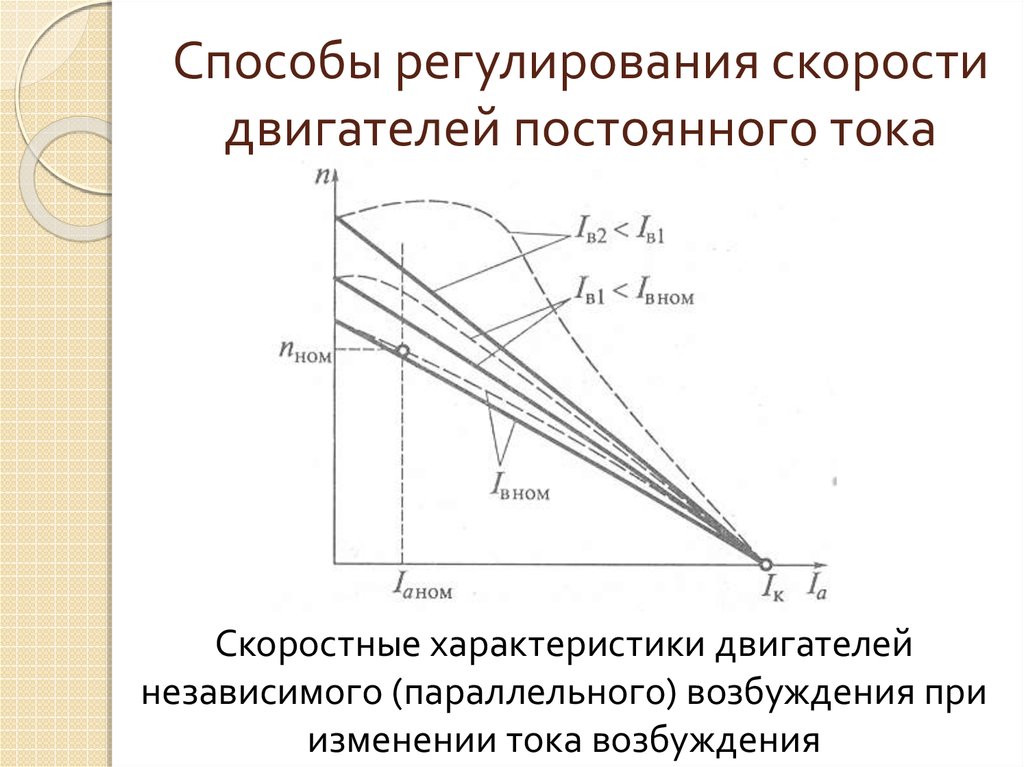
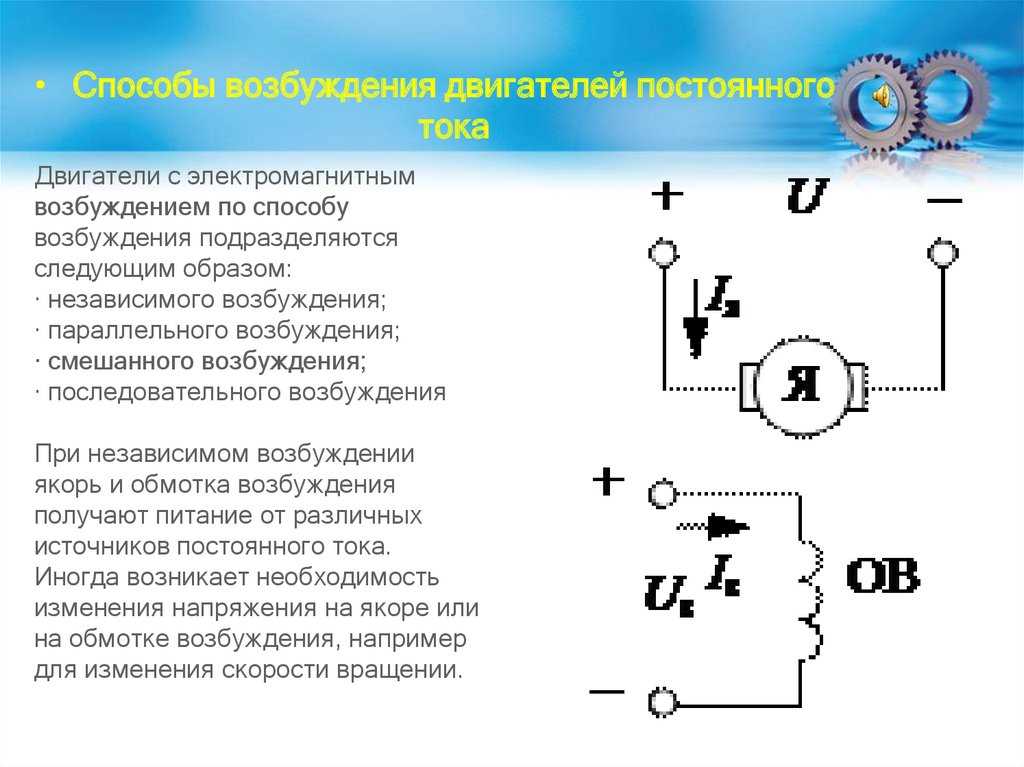
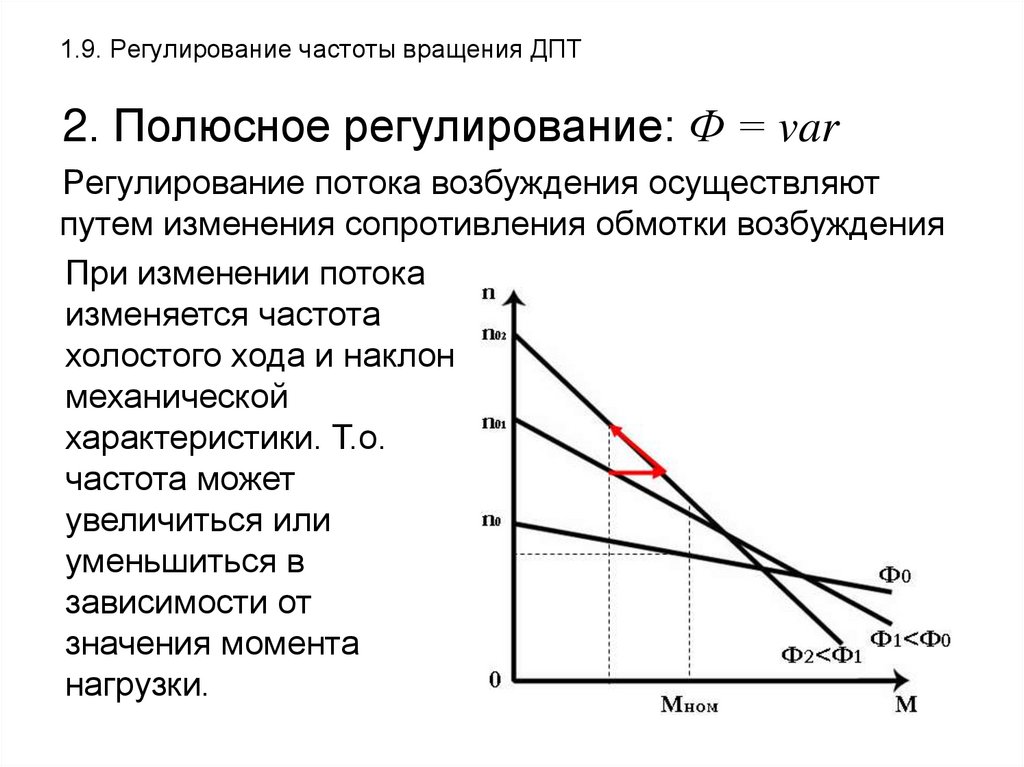
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.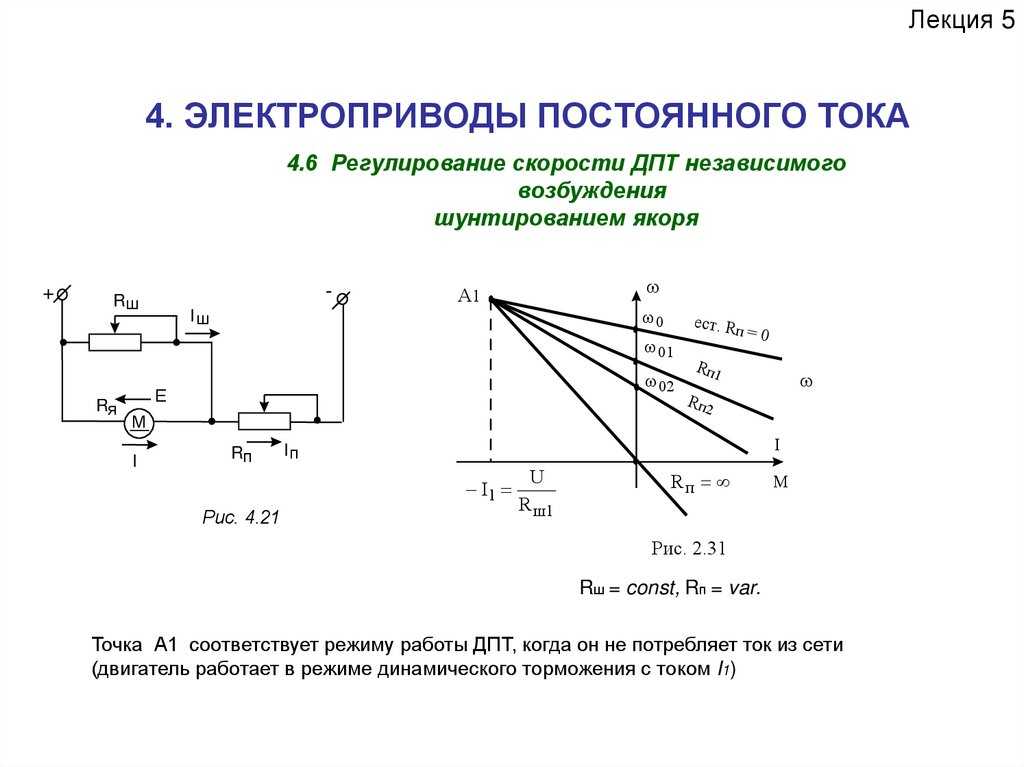
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
Регуляторы скорости двигателя постоянного тока — Grainger Industrial Supply
47 изделий
Эти регуляторы регулируют скорость двигателя постоянного тока. Они управляют регулируемыми скоростями разгона и торможения и защищают двигатель от внезапных скачков напряжения. Устройства с широтно-импульсной модуляцией (ШИМ) регулируют импульсы напряжения для регулирования скорости. Кремниевый управляемый выпрямитель (SCR) преобразует переменное напряжение в постоянное и обеспечивает регулирование скорости. Эти регуляторы скорости используются с двигателями постоянного тока с постоянными магнитами или с параллельными обмотками, а также с редукторными двигателями постоянного тока в устройствах с постоянным или уменьшающимся крутящим моментом, таких как конвейеры, упаковочное оборудование и центрифуги.
Эти элементы управления регулируют скорость двигателя постоянного тока.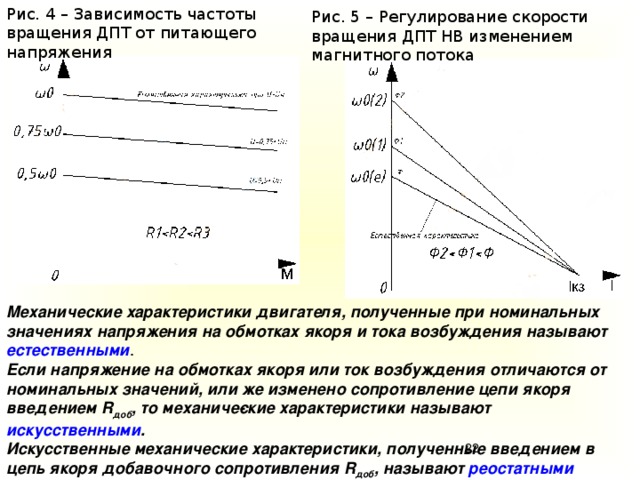 Они управляют регулируемыми скоростями разгона и торможения и защищают двигатель от внезапных скачков напряжения. Устройства с широтно-импульсной модуляцией (ШИМ) регулируют импульсы напряжения для регулирования скорости. Кремниевый управляемый выпрямитель (SCR) преобразует переменное напряжение в постоянное и обеспечивает регулирование скорости. Эти регуляторы скорости используются с двигателями постоянного тока с постоянными магнитами или с параллельными обмотками, а также с редукторными двигателями постоянного тока в устройствах с постоянным или уменьшающимся крутящим моментом, таких как конвейеры, упаковочное оборудование и центрифуги.
Они управляют регулируемыми скоростями разгона и торможения и защищают двигатель от внезапных скачков напряжения. Устройства с широтно-импульсной модуляцией (ШИМ) регулируют импульсы напряжения для регулирования скорости. Кремниевый управляемый выпрямитель (SCR) преобразует переменное напряжение в постоянное и обеспечивает регулирование скорости. Эти регуляторы скорости используются с двигателями постоянного тока с постоянными магнитами или с параллельными обмотками, а также с редукторными двигателями постоянного тока в устройствах с постоянным или уменьшающимся крутящим моментом, таких как конвейеры, упаковочное оборудование и центрифуги.
Open
. Загрузка … Загрузка … | |||||||
| Загрузка … | |||||||
| Загрузка … | |||||||
| Нагрузка … |
Скорость — NEMA 4X
9003
| Loading… | |||||||
| Loading… | |||||||
| Loading… |
Open
Загрузка .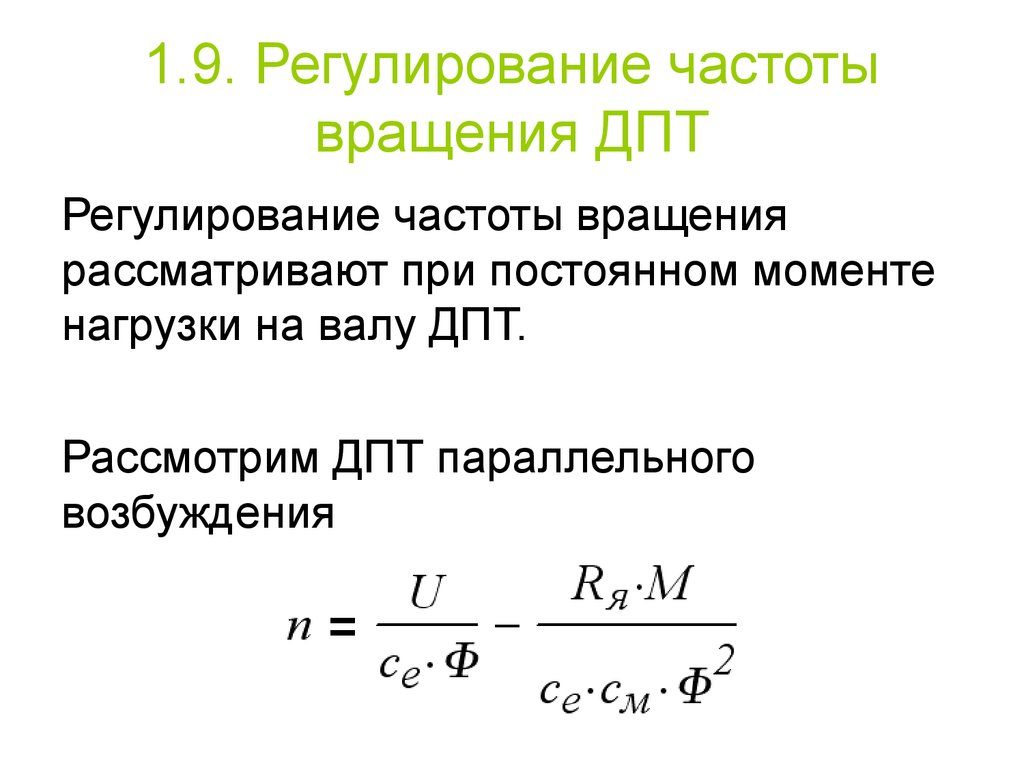 .. .. | |||||||||||||||
| Загрузка … | |||||||||||||||
| Нагрузка | … | ||||||||||||||
| .0028 | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Loading… | |||||||||||||||
| Загрузка… |
 Скорость DC. Прилагается – NEMA 1
Скорость DC. Прилагается – NEMA 1 ..
.. ..
..
 Коллекторные двигатели постоянного тока создают электрические и акустические шумы и требуют частого обслуживания, поскольку их щетки и коллектор являются расходными частями. Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если не требуется регулирование скорости.
Коллекторные двигатели постоянного тока создают электрические и акустические шумы и требуют частого обслуживания, поскольку их щетки и коллектор являются расходными частями. Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если не требуется регулирование скорости. Скорость самая высокая, когда нет нагрузки, спадает вправо, пока не будет достигнут максимальный крутящий момент при нулевой скорости.
Скорость самая высокая, когда нет нагрузки, спадает вправо, пока не будет достигнут максимальный крутящий момент при нулевой скорости.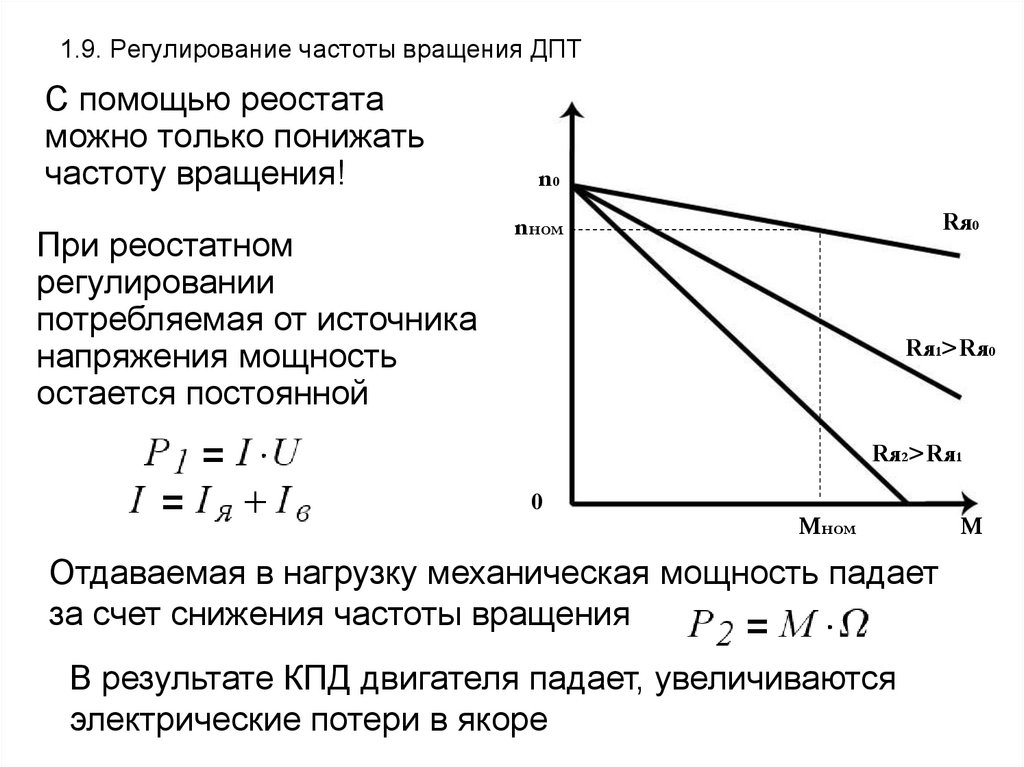
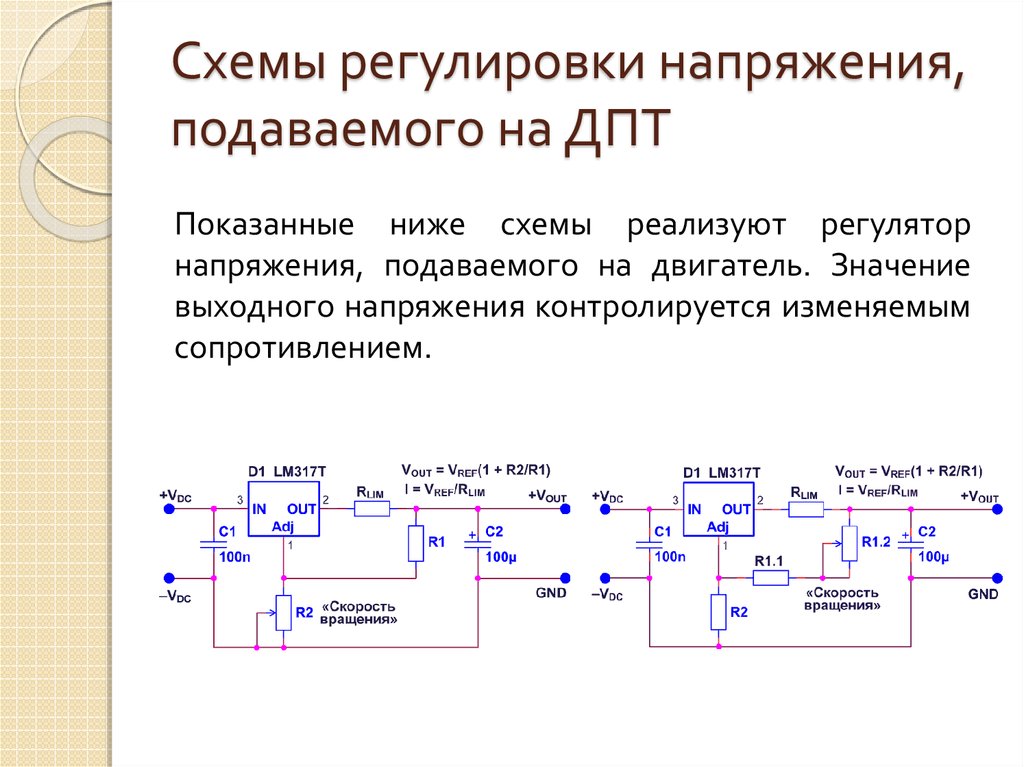
 Хотя транзистор или другое полупроводниковое устройство можно использовать в качестве последовательно соединенного переменного резистора, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводником), и поэтому в наши дни он используется редко.
Хотя транзистор или другое полупроводниковое устройство можно использовать в качестве последовательно соединенного переменного резистора, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводником), и поэтому в наши дни он используется редко.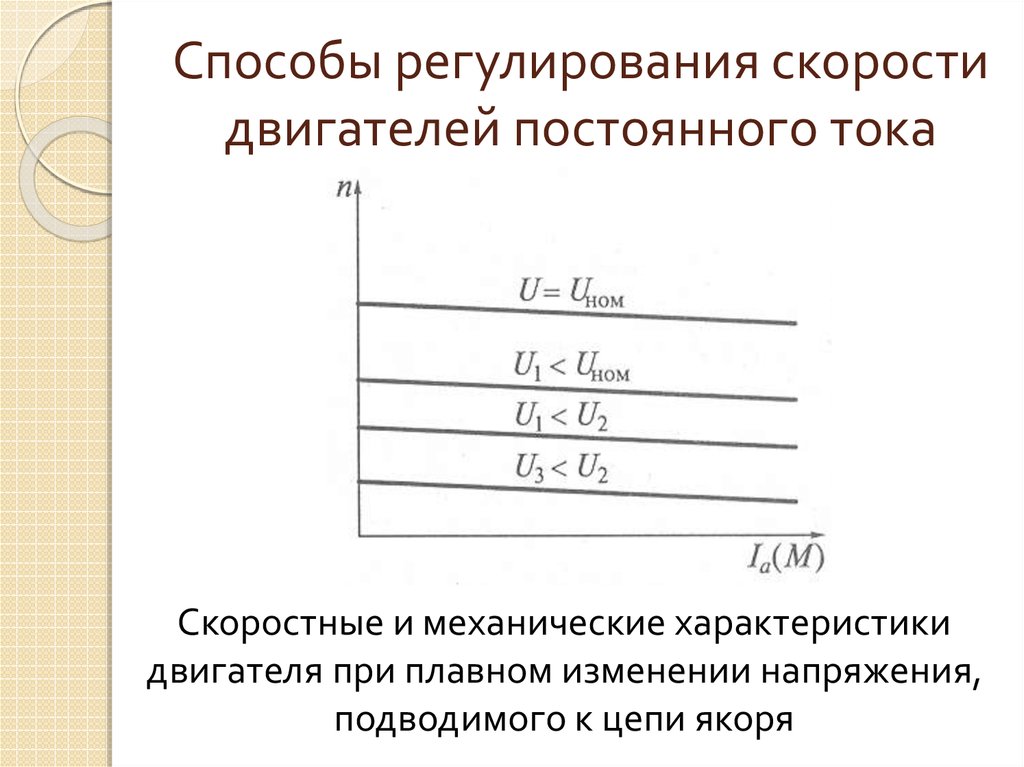 Это связано с тем, что крутящий момент двигателя зависит от самой нагрузки, а также от других факторов, таких как температура, влажность и изменения во времени. Простое вождение двигателя с постоянным напряжением приведет к тому, что его скорость будет колебаться при изменении нагрузки.
Это связано с тем, что крутящий момент двигателя зависит от самой нагрузки, а также от других факторов, таких как температура, влажность и изменения во времени. Простое вождение двигателя с постоянным напряжением приведет к тому, что его скорость будет колебаться при изменении нагрузки.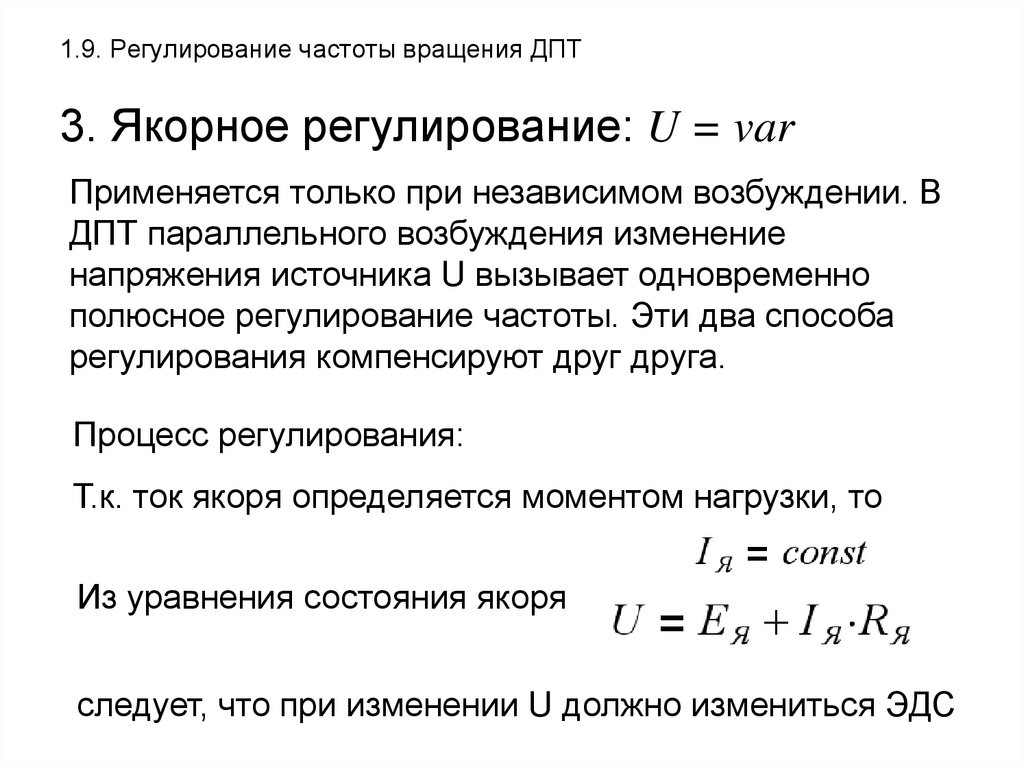 При этом поддерживается постоянная скорость двигателя. В то время как в прошлом для управления напряжением возбуждения использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.
При этом поддерживается постоянная скорость двигателя. В то время как в прошлом для управления напряжением возбуждения использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.