Содержание
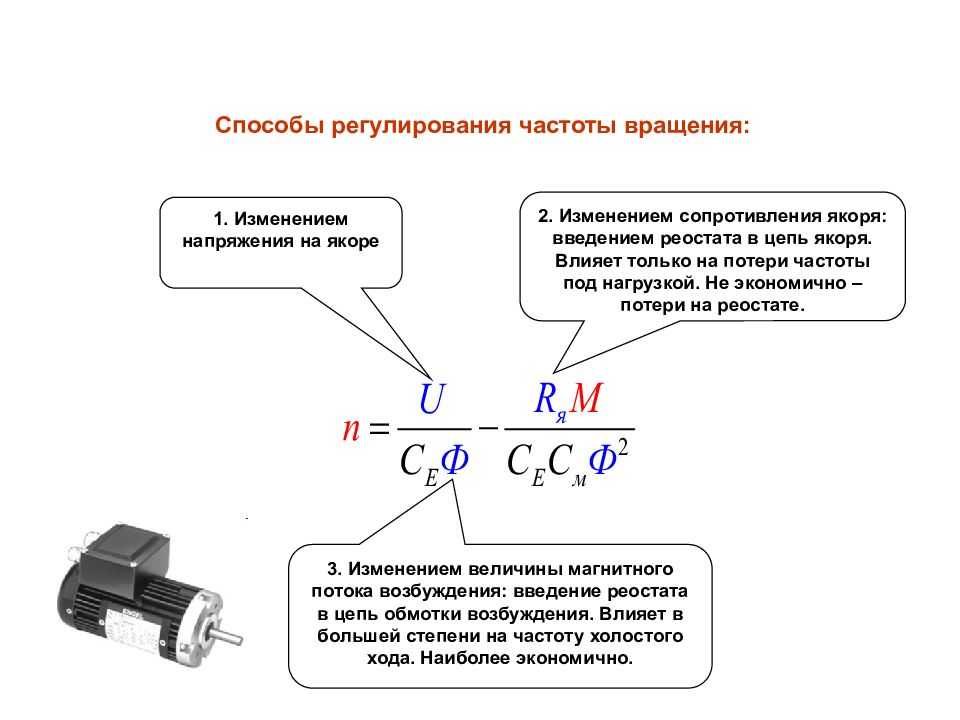
Способы регулирования скорости двигателей постоянного тока независимого возбуждения.
Рисунок — Схема включения двигателя
постоянного тока независимого возбуждения.
Многие производственные механизмы
требуют регулирования скорости вращения
двигателей. Под регулированием скорости
следует понимать принудительное
изменение скорости путем воздействия
на различные параметры электропривода
с целью получения требуемых механических
характеристик.
Для оценки различных способов регулирования
скорости существуют следующие параметры:
Диапазон регулирования:
это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется
числом устойчивых скоростей, получаемых
в данном диапазоне регулирования;Экономичность регулирования. Оцениваются
капитальные затраты, потери электроэнергии;Направление возможного регулирования.

Вверх или вниз от скорости, определяемой
естественной характеристикой.

Запишем уравнение электромеханической
характеристики:
,
из которого следует, что изменять
скорость двигателей можно воздействуя
на следующие параметры:
— введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к
якорю
.
Рисунок — Схема включения двигателя
постоянного тока независимого возбуждения.
Многие производственные механизмы
требуют регулирования скорости вращения
двигателей. Под регулированием скорости
следует понимать принудительное
изменение скорости путем воздействия
на различные параметры электропривода
с целью получения требуемых механических
характеристик.
Для оценки различных способов регулирования
скорости существуют следующие параметры:
Диапазон регулирования:
это соотношениек,
при которых работа привода при
существующих нагрузках будет устойчивой;Плавность регулирования – характеризуется
числом устойчивых скоростей, получаемых
в данном диапазоне регулирования;Экономичность регулирования.
Оцениваются
капитальные затраты, потери электроэнергии;Направление возможного регулирования.
Вверх или вниз от скорости, определяемой
естественной характеристикой.
 Оцениваются
Оцениваются Запишем уравнение электромеханической
характеристики:
,
из которого следует, что изменять
скорость двигателей можно воздействуя
на следующие параметры:
— введение в цепь якоря;
Изменением магнитного потока Ф;
Изменением напряжения, подводимого к
якорю
.
Регулирование скорости изменением
сопротивления якорной цепи.
Регулирование
скорости введениемобеспечивает приснижение скорости двигателя.
Оценим приведенный способ регулирования:
Диапазон регулирования не превышает
3:1, т. к. работа при низких скоростях
нестабильна незначительное изменение МСможет вызвать остановку двигателя. С
уменьшением МСуменьшается
диапазон регулирования;Регулирование ступенчатое;
Регулировать можно только вниз от
основной скорости.
 к. работа при низких скоростях
к. работа при низких скоростях II. Регулирование скорости
изменением магнитного потока.
Отметим, что изменение Ф возможно лишь
в сторону уменьшения, т.е. в режиме,
близком к номинальному, магнитная
система двигателя насыщена. Уменьшение
Ф<ФНприводит к увеличениюи увеличенной просадке скорости.
Т.к.
,
то при ослаблении поля электрического
двигателя, приMC=const,IC.
Оценим заданный способ регулирования:
Диапазон регулирования для большинства
двигателей (1,5…2):1Для двигателя независимого возбуждения
можно обеспечить плавное регулирование.Регулирование экономичное, т.к.
капитальные затраты и потер при этом
невелики из-за невысокой мощности цепи
возбуждения.Регулирование wвозможно
только вверх от основной скорости.

Регулирование скорости изменением
подводимого напряжения.
При изменении подводимого напряжения
изменяется лишь скорость идеального
Х.Х.
,
поэтому все характеристики расположены
параллельно друг другу и параллельно
естественной характеристике.
Оценим данный способ регулирования:
Диапазон регулирования (20…30):1
Регулирование скорости плавное
Отличается экономичностью, т.к. энергия
торможения возвращается в сетьРегулирование, как правило, вниз от
основной скорости и лишь некоторые
двигатели позволяют увеличить UЯвышеUЯН.

| Регулирование скорости вращения двигателей постоянного тока
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
Регуляторы скорости двигателя постоянного тока — Grainger Industrial Supply
Регуляторы скорости двигателя постоянного тока
47 товаров
Эти регуляторы регулируют скорость двигателя постоянного тока. Они управляют регулируемыми скоростями разгона и торможения и защищают двигатель от внезапных скачков напряжения. Устройства с широтно-импульсной модуляцией (ШИМ) регулируют импульсы напряжения для регулирования скорости. Кремниевый управляемый выпрямитель (SCR) преобразует переменное напряжение в постоянное и обеспечивает регулирование скорости. Эти регуляторы скорости используются с двигателями постоянного тока с постоянными магнитами или с параллельными обмотками, а также с редукторными двигателями постоянного тока в устройствах с постоянным или уменьшающимся крутящим моментом, таких как конвейеры, упаковочное оборудование и центрифуги.
Эти регуляторы скорости используются с двигателями постоянного тока с постоянными магнитами или с параллельными обмотками, а также с редукторными двигателями постоянного тока в устройствах с постоянным или уменьшающимся крутящим моментом, таких как конвейеры, упаковочное оборудование и центрифуги.
ШИМ СКОРОСТИ ОСОБЕННОСТИ СКОРОСТИ
Открыть
ПСИ Скорость постоянного тока.
В корпусе — NEMA 4X
ШИМ-регулятор скорости постоянного тока В корпусе — NEMA 4X, отсортировано по максимальному току в порядке возрастания
Loading. .. .. |
SCR DC Speed Controls
Open
SCR DC Speed Controls Open, sorted by Maximum Current, ascending
| Загрузка… |
Корпус – IP30
Регуляторы скорости пост.4
Прилагаемое — NEMA 1
SCR DC Speed Controlscom
 ..
..Прикрытый — NEMA 4
SCR SPEED Controls.0005
| Загрузка … |
СКАЗАЯ — NEMA 4X
.
Примечание. Информация о наличии товара предоставляется в режиме реального времени и постоянно корректируется. Товар будет зарезервирован для вас при оформлении заказа.
Как управляются двигатели постоянного тока? — Регулирование скорости двигателей постоянного тока
Двигатели постоянного тока питаются от постоянного тока. Они имеют широкий спектр применения в таких продуктах, как бытовая техника, транспортные средства и заводы. Можно сказать, что они играют жизненно важную роль в нашей жизни.
Они имеют широкий спектр применения в таких продуктах, как бытовая техника, транспортные средства и заводы. Можно сказать, что они играют жизненно важную роль в нашей жизни.
Однако многие пользователи выражают неуверенность в том, как управлять скоростью двигателей постоянного тока. На этой странице представлено простое введение в то, как это делается.
Что такое двигатель постоянного тока?
Начнем с того, что электродвигатель — это машина, использующая электричество для вращения вала, тем самым преобразуя электрическую энергию в механическую. Электродвигатели в целом делятся на следующие три типа.
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
Электродвигатели переменного тока приводятся в действие переменным током, а шаговые двигатели приводятся в действие импульсами электроэнергии. С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
- Высокий пусковой момент и возможность вращения на высоких скоростях
- Мощность двигателя пропорциональна приложенному напряжению
Двигатели постоянного тока подразделяются на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока. Коллекторные двигатели постоянного тока имеют катушки в своем роторе и изменяют способ прохождения тока через катушки на основе механизма, использующего коммутаторы и щетки. Коллекторные двигатели постоянного тока создают электрические и акустические шумы и требуют частого обслуживания, поскольку их щетки и коллектор являются расходными частями. Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если не требуется регулирование скорости.
Бесщеточный двигатель постоянного тока, напротив, не требует коммутатора и щеток, поскольку в роторе имеется постоянный магнит. Это, однако, означает, что им требуется схема привода. Они также отличаются низким уровнем обслуживания, бесшумной работой и длительным сроком службы.
Характеристики двигателей постоянного тока
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании благодаря простоте изменения их скорости. Итак, как это достигается на практике? Следующее объяснение начинается с рассмотрения характеристик двигателя постоянного тока.
Характеристики двигателя постоянного тока представлены кривой крутящий момент-скорость, которая наклонена вниз вправо, с крутящим моментом в качестве горизонтальной оси и скоростью в качестве вертикальной оси. Скорость самая высокая, когда нет нагрузки, спадает вправо, пока не будет достигнут максимальный крутящий момент при нулевой скорости.
Крутящий момент и скорость изменяются в зависимости от нагрузки, как показано на этой кривой зависимости крутящего момента от скорости. Глядя на график ниже, давайте рассмотрим двигатель, вращающийся со скоростью ω0 с крутящим моментом T0. Если крутящий момент нагрузки затем увеличится до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогичным образом, если момент нагрузки далее увеличивается до T2, скорость падает до ω2.
Аналогичным образом, если момент нагрузки далее увеличивается до T2, скорость падает до ω2.
Крутящий момент и скорость двигателя постоянного тока
Взгляд на взаимосвязь между крутящим моментом и током показывает, что они пропорциональны друг другу. Соотношение между ними является постоянным для двигателя, при этом соотношение остается неизменным независимо от изменений скорости двигателя или напряжения привода. Это означает, что измерения тока двигателя достаточно для определения крутящего момента двигателя.
Момент-скорость двигателя постоянного тока и кривая момента-тока
Что происходит при изменении напряжения привода?
Итак, что происходит с кривой крутящий момент-скорость, когда изменяется напряжение, используемое для привода двигателя постоянного тока? На приведенном ниже графике показаны кривые крутящий момент-скорость для различных напряжений. Удвоение напряжения привода удваивает как скорость двигателя без нагрузки, так и пусковой момент (крутящий момент, когда двигатель зафиксирован). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость вверх, параллельно. Кривая крутящий момент-скорость для двигателя постоянного тока может быть скорректирована по желанию путем изменения напряжения, подаваемого на двигатель.
Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость вверх, параллельно. Кривая крутящий момент-скорость для двигателя постоянного тока может быть скорректирована по желанию путем изменения напряжения, подаваемого на двигатель.
Напряжение привода двигателя и кривая крутящего момента
Как заставить двигатель постоянного тока вращаться с необходимой скоростью
Теперь, учитывая эти характеристики, как вы можете вращать двигатель с требуемой скоростью при любом заданном моменте нагрузки?
Кривая крутящего момента двигателя постоянного тока трансформируется в зависимости от изменения напряжения привода. Это означает, что указанная выше цель может быть достигнута простой регулировкой напряжения возбуждения. Если посмотреть на график ниже, если требуется вращение со скоростью ω1, когда момент нагрузки равен, например, T0, напряжение привода V4 слишком низкое, что приводит к скорости ω2. Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 как раз подходит для достижения желаемой скорости ω1.
Однако управление двигателем при промежуточном напряжении V3 как раз подходит для достижения желаемой скорости ω1.
Напряжение и скорость привода двигателя
Регулируя таким образом напряжение привода, можно заставить двигатель постоянного тока вращаться с желаемой скоростью независимо от крутящего момента нагрузки.
Методы управления напряжением привода
Два способа регулировки напряжения привода: линейное управление и ШИМ-управление.
Линейное управление работает путем включения переменного резистора последовательно с двигателем и регулировки сопротивления для изменения напряжения на двигателе. Хотя транзистор или другое полупроводниковое устройство можно использовать в качестве последовательно соединенного переменного резистора, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводником), и поэтому в наши дни он используется редко.
Альтернативным методом является ШИМ-управление. Напряжение, подаваемое на двигатель, можно изменять, включая и выключая полупроводниковый переключатель (например, транзистор или полевой транзистор) на высокой скорости, при этом напряжение определяется шириной импульса включения и выключения. Высокая эффективность этого метода делает его наиболее распространенным в настоящее время.
Напряжение, подаваемое на двигатель, можно изменять, включая и выключая полупроводниковый переключатель (например, транзистор или полевой транзистор) на высокой скорости, при этом напряжение определяется шириной импульса включения и выключения. Высокая эффективность этого метода делает его наиболее распространенным в настоящее время.
Линейное управление
ШИМ-управление
Регулятор скорости двигателя
Использование этих методов позволяет гибко регулировать скорость двигателя постоянного тока. Однако для поддержания постоянной скорости вращения двигателя требуется дополнительное управление. Это связано с тем, что крутящий момент двигателя зависит от самой нагрузки, а также от других факторов, таких как температура, влажность и изменения во времени. Простое вождение двигателя с постоянным напряжением приведет к тому, что его скорость будет колебаться при изменении нагрузки.
Поддержание постоянной скорости, несмотря на переменную нагрузку, требует постоянной регулировки напряжения привода в ответ на эти изменения нагрузки. На приведенном ниже графике показан пример, когда момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае снижение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, для поддержания постоянной скорости двигателя ω0 требуется, чтобы напряжение привода увеличилось до V2.
На приведенном ниже графике показан пример, когда момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае снижение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, для поддержания постоянной скорости двигателя ω0 требуется, чтобы напряжение привода увеличилось до V2.
Контроль скорости
Скорость измеряется датчиком, прикрепленным к двигателю. Вычисляется разница между измеренной и требуемой скоростью двигателя (ошибка скорости), а напряжение привода регулируется таким образом, чтобы оно увеличивалось, если скорость была слишком низкой, и уменьшалась, если скорость была слишком высокой. При этом поддерживается постоянная скорость двигателя. В то время как в прошлом для управления напряжением возбуждения использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.
Схема управления скоростью двигателя постоянного тока
Схема управления скоростью бесщеточного двигателя постоянного тока
Датчик скорости
Выводит сигнал, указывающий скорость двигателя.
К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы.Цепь определения скорости
Расчет скорости двигателя по сигналу датчика скорости.
Задание скорости
Выводит целевую скорость двигателя.
Компаратор
Вычисляет разницу между заданием скорости и измеренной скоростью.
Схема расчета напряжения привода
Вычисляет напряжение привода двигателя на основе расчетной ошибки скорости.
Цепь привода
Цепь, которая регулирует напряжение, подаваемое на двигатель, в соответствии с сигналом напряжения привода.
 К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы.
К устройствам, используемым для этой цели, относятся датчики Холла, энкодеры и тахогенераторы. Двигатель постоянного тока может работать в устойчивом режиме, контролируя его скорость так, чтобы она оставалась постоянной независимо от изменений нагрузки. Эти двигатели также подходят для широкого спектра методов управления, которые могут быть реализованы с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Эти двигатели также подходят для широкого спектра методов управления, которые могут быть реализованы с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Двигатели постоянного тока: простые в использовании двигатели с простой регулировкой скорости
Двигатели постоянного тока питаются от постоянного тока, и, в отличие от двигателей переменного тока, их скорость легко регулируется. Характеристики двигателя постоянного тока представлены его кривой крутящий момент-скорость, в которой скорость и крутящий момент нагрузки обратно пропорциональны. Эта кривая крутящий момент-скорость преобразуется в зависимости от изменения напряжения привода. Соответственно, регулируя напряжение, подаваемое на двигатель постоянного тока, его можно заставить работать на любой скорости независимо от крутящего момента нагрузки.
Для изменения напряжения привода двигателя можно использовать линейное или ШИМ-управление. ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение, включая и выключая полупроводниковый переключатель с высокой скоростью таким образом, что изменение ширины импульса включения и выключения изменяет напряжение.
ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение, включая и выключая полупроводниковый переключатель с высокой скоростью таким образом, что изменение ширины импульса включения и выключения изменяет напряжение.
Решение проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки.