Содержание
Регулирование частоты вращения, пуск, реверсирование и торможение электродвигателей постоянного тока
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.
Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
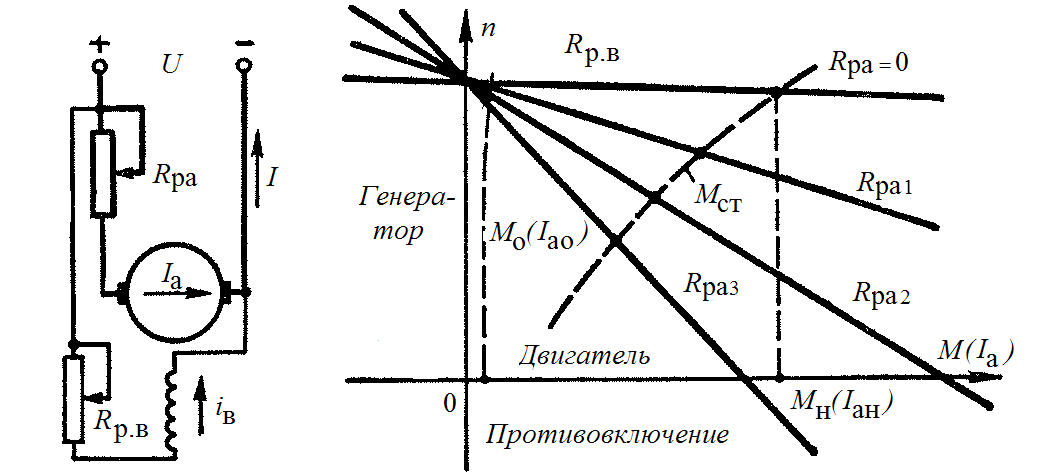
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
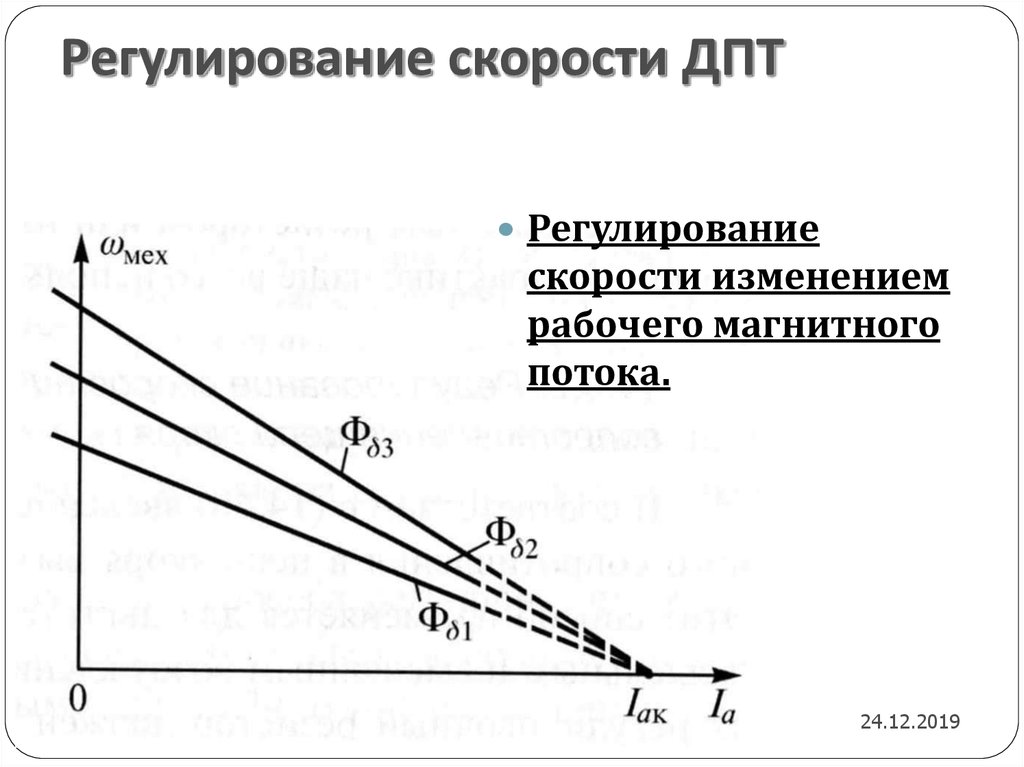
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.
Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения
Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске
Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.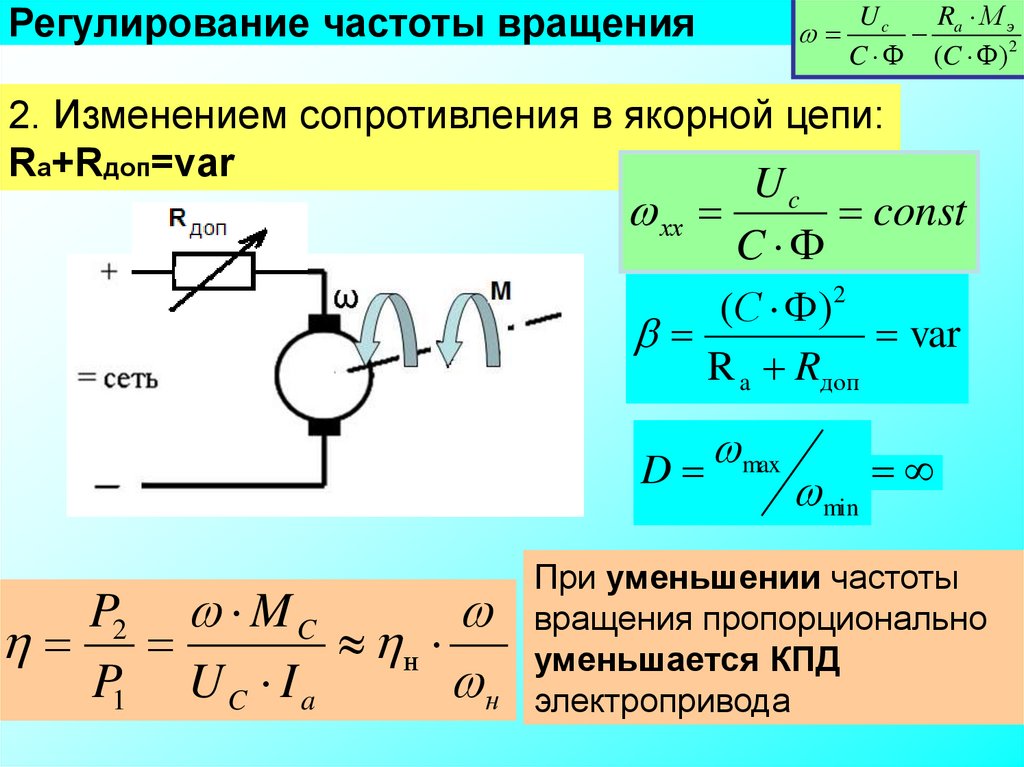 д.с., что приводит к уменьшению тока якоря
д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.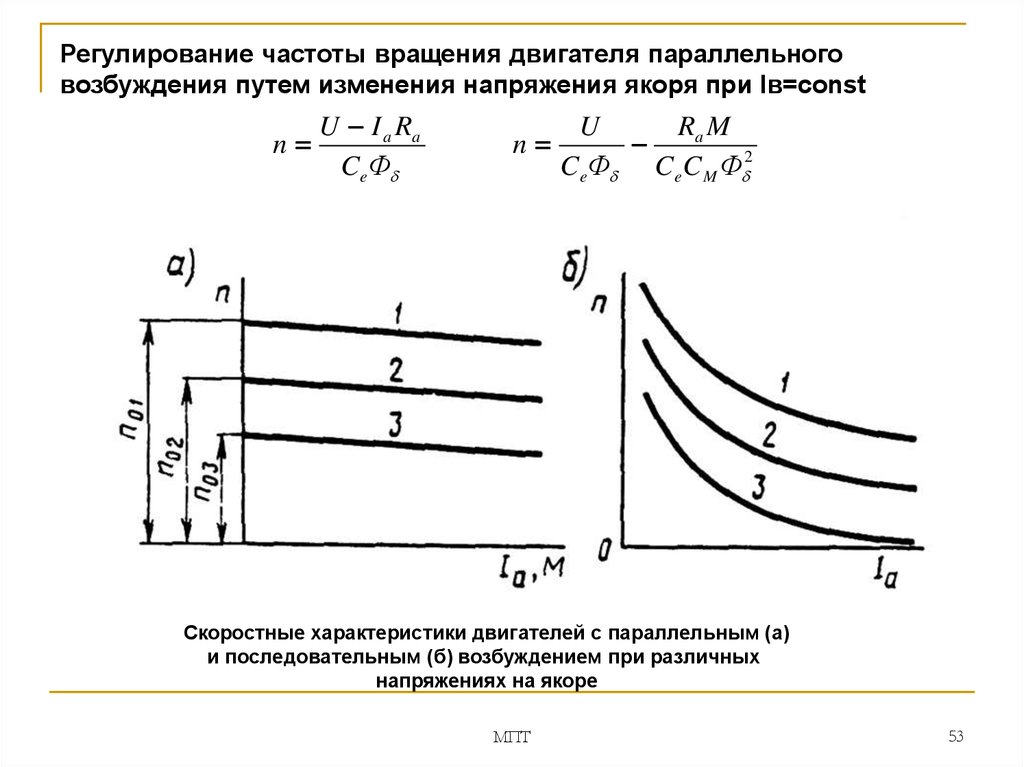
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
T = (Lя+L)/Rя
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики
Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики
Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.
Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.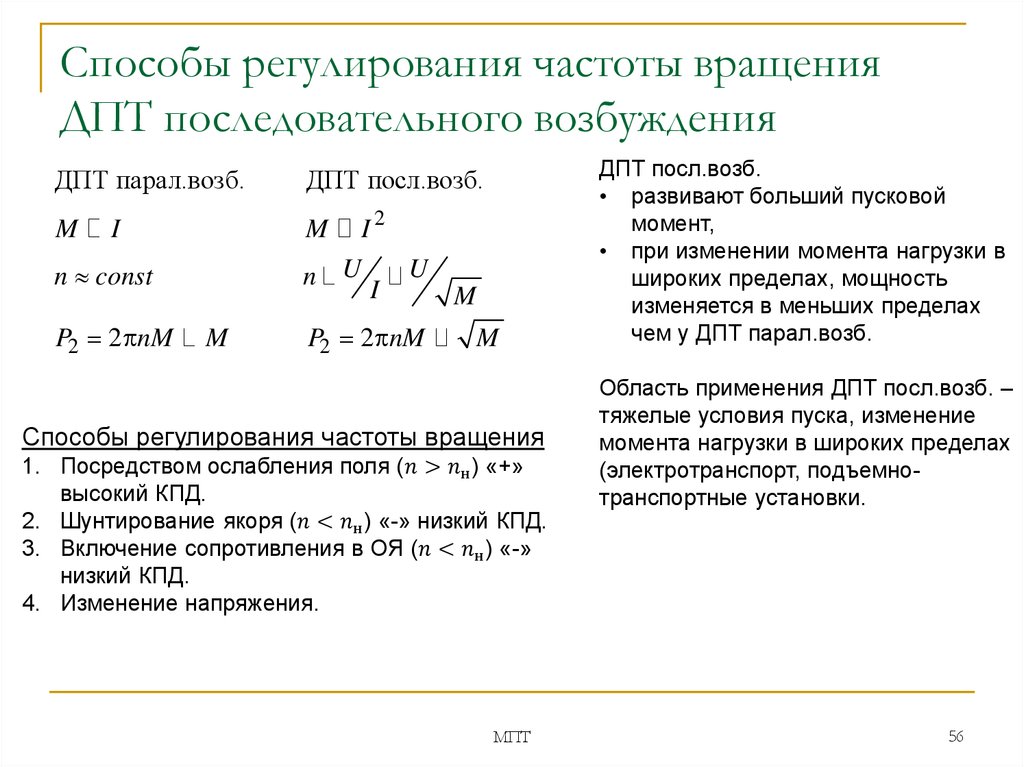
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет
При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
Регулирование скорости двигателя постоянного тока. Достоинства и недостатки двигателя постоянного тока
Электротехника \
Электрические машины
Страницы работы
4
страницы
(Word-файл)
Посмотреть все страницы
Скачать файл
Фрагмент текста работы
16
Основные формулы, используемые при управлении
ДПТ
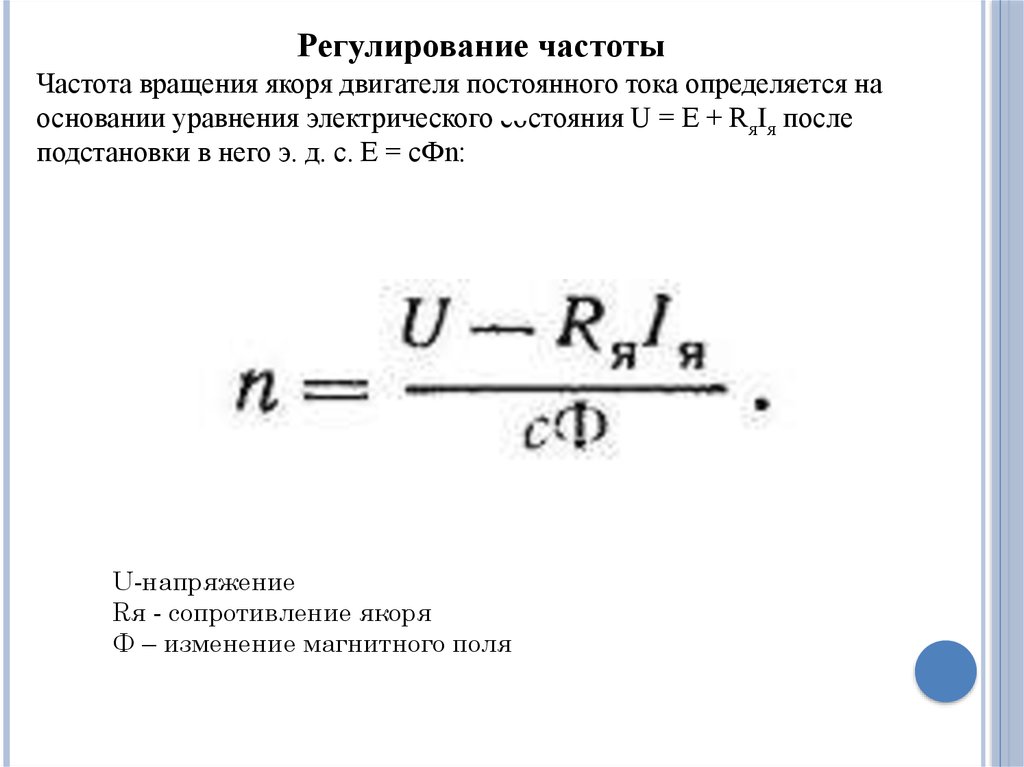
ω = (U — IR)/CΦ где U — подводимое к ОЯ
напряжение, I — ток ОЯ, R — сопротивление цепи якоря, С — конструктивная
постоянная, Ф — поток создаваемый обмоткой возбуждения
Сществует
три способа, благодаря которым можно производить регулирование скорости
двигателя постоянного тока угловой скорости.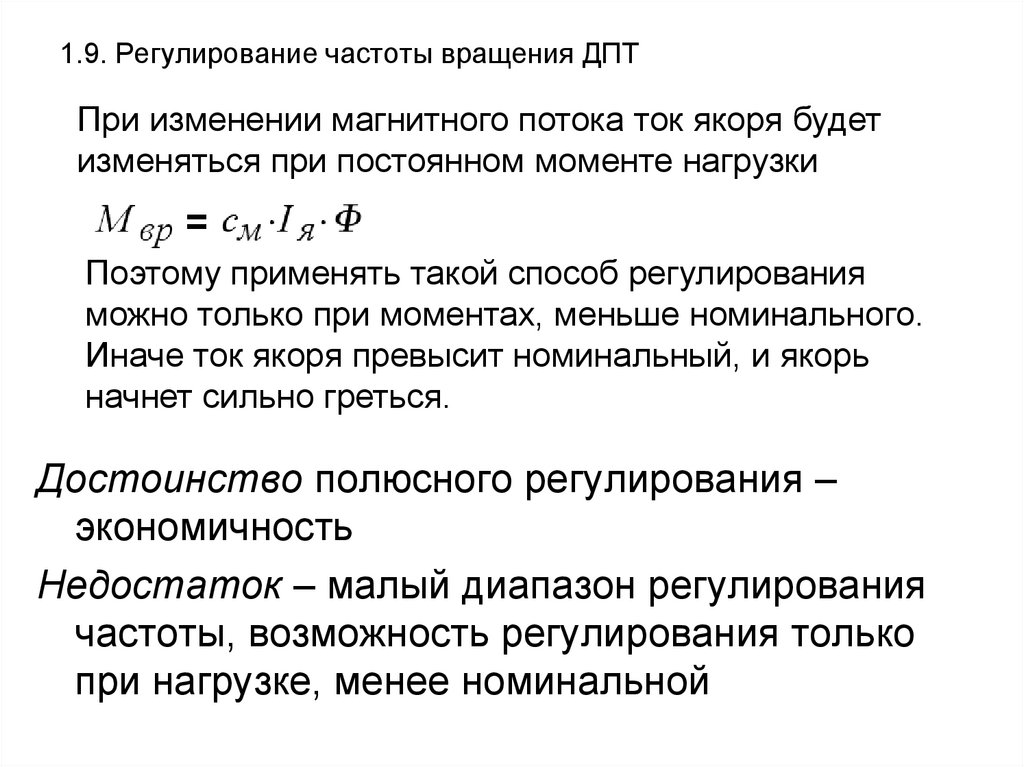 Это следует из
Это следует из
уравнения электромеханической характеристики.
1) регулирование за счет увеличения величины сопротивления реостата в цепи ,
2) регулирование за счет увеличения или уменьшения потока возбуждения двигателя
3) регулирование за счет уменьшение или увеличения подводимого к обмотке якоря
двигателя напряжения U.
Ток в цепи якоря I и момент М, который развивает двигатель, зависит только от
величины нагрузки на его валу. Давайте рассмотрим один из способов
регулирования скорости двигателя постоянного тока в результате изменения сопротивления
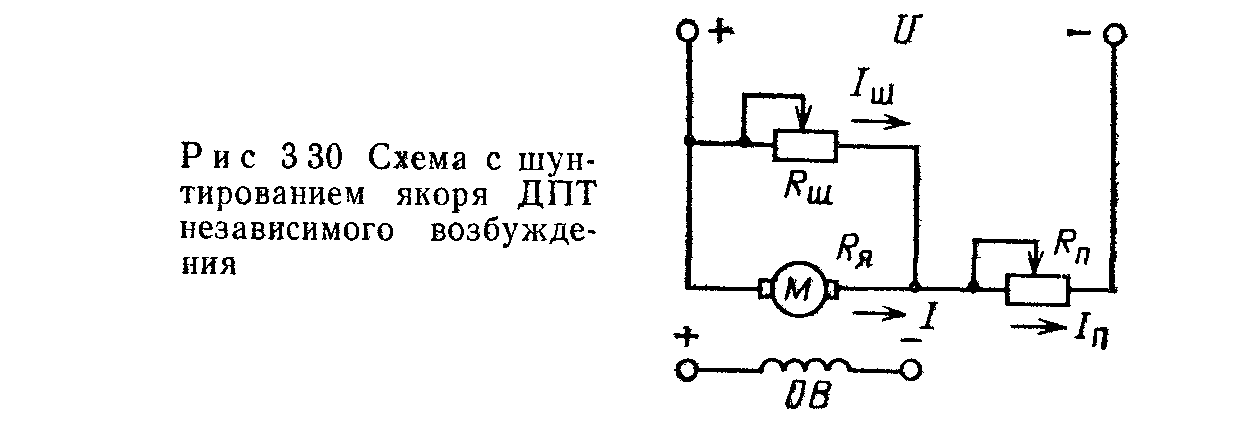
в цепи якоря. Схема включенного двигателя для данного случая представлена на
рис. 1, а механические характеристики — на рис. 2, а.
Рис. 1. Схема
включенный двигатель постоянного тока независимого возбуждения
Рис. 2. Механические характеристики двигателей постоянного тока при различных сопротивлениях
в цепи якоря (а) и напряжениях (б)
Если мы изменяем сопротивление реостата в цепи якоря можно будет получить при
нормальной нагрузке разные угловые скорости электродвигателя на искусственных
характеристиках — 1, 2, 3. Провели глубокий анализ этого способа,
Провели глубокий анализ этого способа,
подразумевающего регулирование
скорости двигателя постоянного тока, при помощи основных
технико-экономических показателей. При данном способе регулирования изменяется
жесткость характеристик в очень широких пределах, то при скоростях меньше
половины номинальной стабильность работы двигателя очень резко ухудшается.
Благодаря чему диапазон регулирования скорости сильно ограничен (D= 2 — З).
Скорость при таком способе становится возможным регулировать в сторону
уменьшения от основной стороны.
О чем во многом свидетельствует электромеханические и механические
характеристики. Высочайшую плавность регулирования очень трудно обеспечить,
потому что потребовалось бы большое количество ступеней регулирования и конечно
большое число контакторов. Целое использование двигателя по току (нагреву) в
таком случае достигается при регулировании с одним и тем же моментом нагрузки.
Минусом рассматриваемого нами способа является наличие больших потерь мощности
при регулировании, которые естественно пропорциональны относительным изменениям
угловой скорости. Плюсом рассмотренного нами способа регулирования угловой
Плюсом рассмотренного нами способа регулирования угловой
скорости являются простая и надежная схема управления. Если учитывать немалые
потери в реостате при маленьких скоростях, этот способ регулирования скорости
применим для приводов с кратковременным и повторно-кратковременным режимом
работы. left0Если рассматривать второй способ регулировки угловой скорости
двигателя постоянного тока. Он осуществляется увеличением величины магнитного
потока за счет введения в цепь обмотки возбуждения другого реостата.
При уменьшении потока угловой скорости двигателя, так же как и нагрузке, так и
при простом ходе увеличивается, а при увеличение потока — уменьшается. На
практике возможно увеличение или уменьшение скорости только в сторону
увеличения в виде насыщения двигателя. При повышении скорости путем ослабления
потока допустимый момент двигателя постоянного тока меняется по закону
гиперболы, а мощность остается неизменной. Диапазон, для которого необходимо регулирование скорости двигателя
постоянного тока для данного способа D = 2 — 4.
Механические характеристики для разный значений потока показаны на рис. 2, а и
2, б, из которых следует, что характеристика в пределах номинального тока имеет
высокую степень жесткости
Похожие материалы
Информация о работе
Скачать файл
Выбери свой ВУЗ
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им.
 Даля 166
Даля 166 - ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им.
 Дегтярева 174
Дегтярева 174 - КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им.
 Макарова 543
Макарова 543 - НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им.
 Герцена 123
Герцена 123 - РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им.
 Гагарина 114
Гагарина 114 - СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им.
 Каразина 305
Каразина 305 - ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Полный список ВУЗов
Влияние скорости ходьбы на пошаговое управление шириной шага
. 2018 8 фев; 68:78-83.
doi: 10.1016/j.jbiomech.2017.12.026.
Epub 2017 24 декабря.
Кэти Х Стимпсон
1
, Лорен Н. Хайткамп
1
, Джоселин С. Хорн
2
, Джесси С. Дин
3
Принадлежности
- 1 Департамент медицинских наук и исследований, Медицинский университет Южной Каролины (MUSC), Чарльстон, Южная Каролина, США.
- 2 Отделение физиотерапии, MUSC, Чарлстон, Южная Каролина, США.
- 3 Департамент медицинских наук и исследований, Медицинский университет Южной Каролины (MUSC), Чарльстон, Южная Каролина, США; Отделение физиотерапии, MUSC, Чарльстон, Южная Каролина, США; Медицинский центр по делам ветеранов Ральфа Х. Джонсона, Чарльстон, Южная Каролина, США. Электронный адрес: [email protected].
PMID:
29306549
DOI:
10.1016/j.jbiomech.2017.12.026
Кэти Х. Стимпсон и др.
Дж. Биомех.
.
. 2018 8 фев; 68:78-83.
doi: 10.1016/j.jbiomech.2017.12.026.
Epub 2017 24 декабря.
Авторы
Кэти Х Стимпсон
1
, Лорен Н. Хайткамп
1
, Джоселин С. Хорн
2
, Джесси С Дин
3
Принадлежности
- 1 Департамент медицинских наук и исследований, Медицинский университет Южной Каролины (MUSC), Чарльстон, Южная Каролина, США.
- 2 Отделение физиотерапии, MUSC, Чарлстон, Южная Каролина, США.
- 3 Департамент медицинских наук и исследований, Медицинский университет Южной Каролины (MUSC), Чарльстон, Южная Каролина, США; Отделение физиотерапии, MUSC, Чарльстон, Южная Каролина, США; Медицинский центр по делам ветеранов Ральфа Х.
 Джонсона, Чарльстон, Южная Каролина, США. Электронный адрес: [email protected].
Джонсона, Чарльстон, Южная Каролина, США. Электронный адрес: [email protected].
PMID:
29306549
DOI:
10.1016/j.jbiomech.2017.12.026
Абстрактный
Молодые, здоровые взрослые люди, идущие с типичной предпочтительной скоростью, используют пошаговую регулировку ширины шага, чтобы соответствующим образом перенаправить движение своего центра масс и обеспечить медиолатеральную стабильность. Однако в настоящее время неясно, сохраняется ли эта стратегия контроля при ходьбе с более низкой скоростью, предпочитаемой многими клиническими популяциями. Мы исследовали, влияет ли скорость ходьбы на типичную стратегию стабилизации. Двенадцать молодых, неврологически здоровых участников шли по беговой дорожке с заданной скоростью (0,2–1,2 м/с). Стратегия медиолатеральной стабилизации была количественно определена как пропорция дисперсии ширины шага, прогнозируемая механическим состоянием таза на протяжении шага (рассчитанная как R 2 величина из множественной линейной регрессии). Наша способность точно предсказывать ширину предстоящего шага увеличивалась в течение одного шага. Сила взаимосвязи между шириной шага и механикой таза в начале шага уменьшалась при более низких скоростях. Однако эти зависящие от скорости различия в значительной степени исчезали к концу шага, за исключением самой низкой скорости ходьбы (0,2 м/с). Эти результаты показывают, что зависящая от механики регулировка ширины шага является постоянным компонентом здоровой походки в зависимости от скорости и контекста. Тем не менее, более медленная скорость ходьбы может облегчить этот контроль, позволяя медиолатеральному изменению положения маховой ноги на более позднем этапе шага, что способствует более медленной ходьбе среди пациентов с ограниченным сенсомоторным контролем.
Стратегия медиолатеральной стабилизации была количественно определена как пропорция дисперсии ширины шага, прогнозируемая механическим состоянием таза на протяжении шага (рассчитанная как R 2 величина из множественной линейной регрессии). Наша способность точно предсказывать ширину предстоящего шага увеличивалась в течение одного шага. Сила взаимосвязи между шириной шага и механикой таза в начале шага уменьшалась при более низких скоростях. Однако эти зависящие от скорости различия в значительной степени исчезали к концу шага, за исключением самой низкой скорости ходьбы (0,2 м/с). Эти результаты показывают, что зависящая от механики регулировка ширины шага является постоянным компонентом здоровой походки в зависимости от скорости и контекста. Тем не менее, более медленная скорость ходьбы может облегчить этот контроль, позволяя медиолатеральному изменению положения маховой ноги на более позднем этапе шага, что способствует более медленной ходьбе среди пациентов с ограниченным сенсомоторным контролем.
Ключевые слова:
Баланс; походка; Блок управления двигателем; Стабильность.
Опубликовано Elsevier Ltd.
Похожие статьи
Взаимосвязь между скоростью ходьбы и медиолатеральной стабильностью зависит от предпочтительной скорости человека.
Бринкерхофф С.А., Мурра В.М., Ропер Дж.А.
Бринкерхофф С.А. и др.
Научный представитель 2023 13 апреля; 13 (1): 6056. дои: 10.1038/s41598-023-32948-з.
Научный представитель 2023.PMID: 37055464
Бесплатная статья ЧВК.Постинсультные дефициты в пошаговом контроле ширины паретического шага.
Стимпсон К.Х., Хейткамп Л.Н., Эмбри А.Е., Дин Дж.К.
Стимпсон К.Х. и соавт.
Осанка походки. 2019 Май; 70:136-140. doi: 10.1016/j.gaitpost.2019.03.003. Epub 2019 6 марта.
doi: 10.1016/j.gaitpost.2019.03.003. Epub 2019 6 марта.
Осанка походки. 2019.PMID: 30856525
Бесплатная статья ЧВК.Здоровые люди более маневренны, когда ходят медленнее, преодолевая виртуальную полосу препятствий.
Се К.Л., Шихан Р.К., Уилкен Дж.М., Дингвелл Дж.Б.
Хси К.Л. и соавт.
Осанка походки. 2018 март; 61: 466-472. doi: 10.1016/j.gaitpost.2018.02.015. Epub 2018 14 февраля.
Осанка походки. 2018.PMID: 29494819
Бесплатная статья ЧВК.Динамическая стабильность во время повышенной скорости ходьбы связана с уверенностью в равновесии у пожилых людей: пилотное исследование.
Конгсук Дж., Браун Д.А., Хёрт С.П.
Конгсук Дж. и др.
Осанка походки. 2019 сен;73:86-92. doi: 10.1016/j.gaitpost.2019.06.018. Epub 2019 4 июля.
Осанка походки. 2019.PMID: 31302337
Бесплатная статья ЧВК.Влияние скорости и времени на динамику ходьбы.
Томас К.С., Рассел Д.М., Ван Лунен Б.Л., Колберг С.Р., Моррисон С.
Томас К.С. и соавт.
Hum Mov Sci. 2017 авг; 54: 320-330. doi: 10.1016/j.humov.2017.06.003. Epub 2017 19 июня.
Hum Mov Sci. 2017.PMID: 28641172
Посмотреть все похожие статьи
Цитируется
Взаимосвязь между скоростью ходьбы и медиолатеральной стабильностью зависит от предпочтительной скорости человека.
Бринкерхофф С.А., Мурра В.М., Ропер Дж.А.
Бринкерхофф С.А. и др.
Научный представитель 2023 13 апреля; 13 (1): 6056. doi: 10.1038/s41598-023-32948-z.
Научный представитель 2023.PMID: 37055464
Бесплатная статья ЧВК.
Моторное планирование высокого уровня позволяет гибко ходить с различными моделями походки в нейромеханической модели.
Рамадан Р., Мейшайн Ф., Райманн Х.
Рамадан Р. и др.
Фронт Биоэнг Биотехнолог. 2022 8 декабря; 10:959357. doi: 10.3389/fbioe.2022.959357. Электронная коллекция 2022.
Фронт Биоэнг Биотехнолог. 2022.PMID: 36568295
Бесплатная статья ЧВК.Нарушенная стратегия постановки стопы при ходьбе у людей с неполным повреждением спинного мозга.
Zwijgers E, van Asseldonk EHF, Vos-van der Hulst M, Geurts ACH, Keijsers NLW.
Цвейгерс Э. и соавт.
J Neuroeng Rehabil. 2022 5 декабря; 19(1):134. doi: 10.1186/s12984-022-01117-0.
J Neuroeng Rehabil. 2022.PMID: 36471441
Бесплатная статья ЧВК.Адаптивный многоцелевой контроль объясняет, как люди совершают боковые маневры при ходьбе.

Десмет Д.М., Кусумано Дж.П., Дингвелл Дж.Б.
Десмет Д.М. и соавт.
PLoS Comput Biol. 2022 14 ноября; 18 (11): e1010035. doi: 10.1371/journal.pcbi.1010035. электронная коллекция 2022 нояб.
PLoS Comput Biol. 2022.PMID: 36374914
Бесплатная статья ЧВК.Стратегии стабилизации для быстрой ходьбы в сложных условиях с неполной травмой спинного мозга.
Корнуэлл Т., Вудворд Дж., Окс В., Гордон К.Е.
Корнуэлл Т. и др.
Front Rehabil Sci. 2021 19 августа; 2:709420. doi: 10.3389/fresc.2021.709420. Электронная коллекция 2021.
Front Rehabil Sci. 2021.PMID: 36188795
Бесплатная статья ЧВК.
Просмотреть все статьи «Цитируется по»
Типы публикаций
термины MeSH
Восстановление скорости после спортивной травмы — Реабилитация Манджарелли
Прежде чем вернуться к бегу на короткие дистанции после спортивной травмы, необходимо постепенно восстанавливать силу, ловкость и скорость под руководством квалифицированного спортивного физиотерапевта. Чтобы подготовиться к возвращению к спринтерскому бегу, физиотерапевт начинает с изометрической и эксцентрической силовой тренировки, за которой следует плиометрическая тренировка и тренировка на ловкость, прежде чем перейти к программе спринтерской тренировки. Возвращение к бегу на короткие дистанции является целью на более поздних этапах реабилитации после травм нижних конечностей. Крайне важно, чтобы спортсмены достигли интервального бега на максимальной скорости в контролируемой и предсказуемой среде физиотерапевтической клиники, прежде чем участвовать в соревнованиях и возвращаться в спорт.
Чтобы подготовиться к возвращению к спринтерскому бегу, физиотерапевт начинает с изометрической и эксцентрической силовой тренировки, за которой следует плиометрическая тренировка и тренировка на ловкость, прежде чем перейти к программе спринтерской тренировки. Возвращение к бегу на короткие дистанции является целью на более поздних этапах реабилитации после травм нижних конечностей. Крайне важно, чтобы спортсмены достигли интервального бега на максимальной скорости в контролируемой и предсказуемой среде физиотерапевтической клиники, прежде чем участвовать в соревнованиях и возвращаться в спорт.
Влияние спринтерского бега на мышцы и сухожилия
Прежде чем вернуться к спринтерскому бегу после спортивной травмы, важно постепенно восстановить силу, ловкость и скорость под руководством квалифицированного спортивного физиотерапевта. Это связано с тем, что время, проведенное вне спорта из-за травмы, снижает физические возможности тканей. Более высокие скорости бега увеличивают мышечную силу, нагрузку на сухожилия и нагрузку на кости, поэтому травмированная нога спортсмена должна быть подготовлена к нагрузкам, которые будут возлагаться на ткани, мышцы и кости нижней конечности посредством прогрессивной программы укрепления.
По мере увеличения скорости бега увеличивается мышечная сила. Например, силы подколенного сухожилия почти в восемь раз превышают массу тела человека, а силы в икроножных мышцах превышают в семь-восемь раз массу тела во время высокоскоростного бега. Более высокие скорости бега также увеличивают нагрузку на сухожилия и увеличивают скорость нагрузки, то есть количество силы и скорость приложения силы к сухожилию.
Сухожилия ведут себя как пружины в цикле растяжения-укорочения. Во время бега, когда происходит удар, сухожилие поглощает энергию, сжимается, а затем выпрямляется, высвобождая часть накопленной энергии. Более высокая скорость нагрузки, например, при беге на короткие дистанции, приводит к большей нагрузке на сухожилия и может повысить риск получения травмы. Например, по мере увеличения скорости бега увеличивается вклад ахиллова сухожилия по сравнению с камбаловидной и икроножной мышцами (икроножными мышцами).
Нагрузка на кости также возникает при увеличении скорости из-за влияния мышечных сокращений на внутреннюю нагрузку на кости. Увеличение сжимающих нагрузок на кость при более высоких скоростях иллюстрируется тем фактом, что сжимающие силы на большеберцовую кость при беге на короткие дистанции в 6-14 раз превышали массу тела человека.
Увеличение сжимающих нагрузок на кость при более высоких скоростях иллюстрируется тем фактом, что сжимающие силы на большеберцовую кость при беге на короткие дистанции в 6-14 раз превышали массу тела человека.
Восстановление скорости во время реабилитации
Реабилитация после травмы нижней конечности первоначально включает в себя кросс-тренировки для поддержания силы и общей физической формы спортсмена без чрезмерной нагрузки на поврежденную область. Кросс-тренировки, которые обычно используются для травмированных спортсменов и бегунов, включают водную пробежку в терапевтическом бассейне, ходьбу на эллиптическом тренажере или использование велотренажера.
Чтобы подготовиться к возвращению к спринтерскому протоколу, физиотерапевт сначала вводит изометрическую и эксцентрическую силовую тренировку, затем плиометрическую тренировку и тренировку на ловкость, прежде чем перейти к программе спринтерской тренировки. Изометрические и эксцентрические силовые тренировки используются для восстановления мышц и сухожилий и подготовки их к нагрузкам, возлагаемым на них при возвращении к бегу на короткие дистанции и спорту. В изометрической тренировке мышцы производят силу без какого-либо внешнего движения, сохраняя определенное положение сустава, сопротивляясь определенной нагрузке или прилагая усилие к неподвижному объекту. Было показано, что изометрические тренировки эффективно справляются с болью, повышают жесткость сухожилий и увеличивают силу в большей степени, чем только силовые тренировки.
В изометрической тренировке мышцы производят силу без какого-либо внешнего движения, сохраняя определенное положение сустава, сопротивляясь определенной нагрузке или прилагая усилие к неподвижному объекту. Было показано, что изометрические тренировки эффективно справляются с болью, повышают жесткость сухожилий и увеличивают силу в большей степени, чем только силовые тренировки.
Эксцентрическая тренировка включает в себя удлинение мышц при сопротивлении заданной нагрузке и может включать использование свободных весов или гантелей. Эксцентрическая тренировка увеличивает длину мышечного пучка, что связано с меньшим риском мышечной травмы. Плиометрическая тренировка включает в себя быстрый цикл растяжения-сокращения мышц, который точно повторяет работу мышц в большинстве видов спорта. Плиометрические тренировки обычно не вводятся до более поздних этапов реабилитации.
Ловкость — это способность быстро менять направление, сохраняя при этом скорость и точность, и часто возникает в ответ на стимул (ожидание стимула или реакция на него).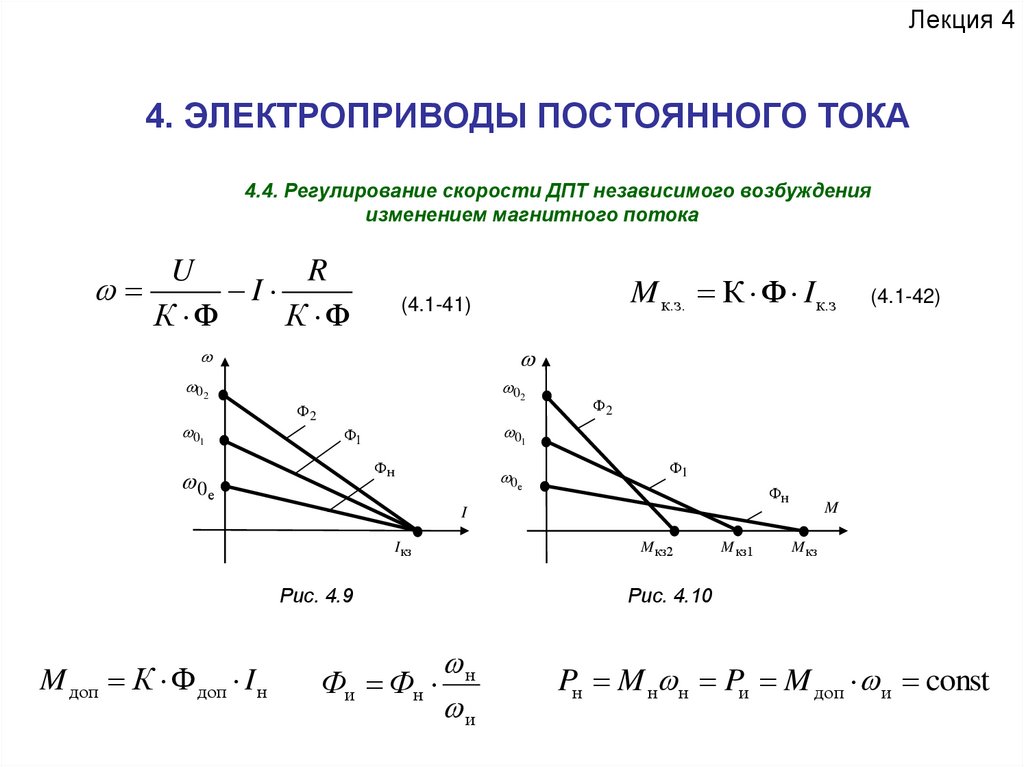 Ловкость требует достаточной силы мышц и сухожилий, технических навыков и двигательного контроля и требуется от большинства спортсменов. Тренировки на ловкость могут включать упражнения на лестнице и конусе, боковые прыжки, восьмерки, реактивные и зеркальные перетасовки и плиометрические прыжки.
Ловкость требует достаточной силы мышц и сухожилий, технических навыков и двигательного контроля и требуется от большинства спортсменов. Тренировки на ловкость могут включать упражнения на лестнице и конусе, боковые прыжки, восьмерки, реактивные и зеркальные перетасовки и плиометрические прыжки.
Протокол возврата к спринтерскому бегу
Возвращение к бегу и спринтерскому бегу является целью на более поздних этапах реабилитации после травм нижних конечностей. Важно, чтобы спортсмены выполняли интервальные спринты на максимальной скорости в контролируемых и предсказуемых условиях физиотерапевтической клиники, прежде чем участвовать в соревнованиях. Во-первых, спортсмен должен пройти обследование опорно-двигательного аппарата у терапевта, чтобы оценить любые нарушения и дефициты, а также определить готовность начать протокол возврата к скорости. Первоначально спортсмен должен выполнить четырехнедельную программу возвращения к бегу трусцой, которая включает интервалы ходьбы и бега, которые постепенно сокращают время ходьбы и увеличивают время бега трусцой, до тридцати минут бега трусцой. Это создает аэробную основу для более интенсивного спринтерского бега и позволяет вносить любые коррективы в форму и механику беговой походки.
Это создает аэробную основу для более интенсивного спринтерского бега и позволяет вносить любые коррективы в форму и механику беговой походки.
Возврат к спринтерскому прогрессу состоит из трех этапов. Первый этап начинается после четырехнедельного возвращения к беговой программе и после того, как спортсмен прошел тест на подколенное сухожилие и четырехглавую мышцу, в котором травмированная нога достигает 70% силы незадействованной стороны. Цель состоит в том, чтобы восстановить работоспособность для более интенсивных пробежек и улучшить общую физическую форму, бегая с 50% максимального усилия.
Стадия 2 начинается после того, как все силовые и функциональные тесты поврежденной ноги достигают 80-85% неповрежденной ноги и восстанавливается полное пассивное сгибание. Целью на этом этапе является развитие специальных спортивных навыков с повторяющимися спринтерскими способностями с бегом на 75% от максимального усилия. По мере увеличения интенсивности бега увеличиваются и периоды отдыха, и основное внимание уделяется правильной технике бега и механике спринта.