

Содержание
1. Расчет противовеса и колонны
ПР
№3.
Расчет механизма поворота крана на
колонне
Кран на колонне
(рис. 1, а) состоит из стрелы1,
гильзы2, колонны3, опорной рамы4, противовеса5, механизма
поворота6, упорного подшипника7,
нижнего и верхнего радиальных подшипников8и9, тали10.
10
[Введите цитату
из документа или краткое описание
интересного события. Надпись можно
поместить в любое место документа. Для
изменения форматирования надписи,
содержащей броские цитаты, используйте
вкладку «Средства рисования».]
[Введите цитату
из документа или краткое описание
интересного события. Надпись можно
поместить в любое место документа. Для
изменения форматирования надписи,
содержащей броские цитаты, используйте
вкладку «Средства рисования».
Рис.
1. Кинематическая схема крана на колонне:
стрела
1,
гильза 2,
колонна 3,
опорная рама 4,
противовес 5,
механизм поворота 6,
упорный подшипник 7,
нижний и верхний радиальные подшипники
8
и 9,
таль 10.
Исходные
данные:
высота подъема груза
грузоподъемность (масса груза)кг;
вылетугловая скорость кранагруппа классификации механизма М6; режим
нагруженияL2
(умеренный) [1].
Рис.
2. Опорно-поворотное
устройство крана на колонне:
колонна – 1;
верхний -2 и нижний -3 наконечники; гильза
— 4; палец
— 5; редуктор — 6;
электродвигатель
— 7; зубчатый венец -8; подвенцовая
шестерня — 9; траверса — 10; фланец
-11; планка — 12; оседержатель – 13; муфта
предельного момента – 14.
1.1.Вес груза
и тали
где
1,25 — коэффициент веса тали со встроенным
в барабан электродвигателем.
Вес стрелы
где
— коэффициент веса стрелы.
Масса стрелы
Плечо силы тяжести
стрелы, совместно с консолью противовеса
и гильзой:
где
0,3 — коэффициент плеча силы тяжести
стрелы, консоли противовеса и гильзы.
1.2.Вес противовеса
где
— плечо силы тяжести противовеса
(противовес вдвое уменьшает опрокидывающий
момент, реакции горизонтальных подшипников
и момент, изгибающий колонну, если он
уравновешивает стрелу и половину
номинального груза).
Примем
тогда
.
Масса противовеса
кг.
1.3.Момент,
изгибающий колонну (рис. 1,б,в)
при номинальном грузе:
Момент, изгибающий
колонну при отсутствии груза (таль
находится слева):
Если имеем равенство
абсолютных значений:
то
противовес выбран правильно. Далее
Далее
считаем, что
(см. рис. 1,б,в).
1.4.Напряжение
изгиба внизу колонны можно определить
из условия прочности колонны
откуда
момент сопротивления колонны
где
— коэффициент запаса прочности [2, с.
114];— коэффициент безопасности [2, с. 115].
Выполним
наконечники 2
и 3
колонны 1
(рис. 2) из стали 35 ГОСТ 8731 (термообработка
— нормализация), для которой
Примем
в зоне посадки подшипника
Указания по
сборке. Планку12приварить к гильзе4(планка квадратная ограничена
слева цилиндром, справа — плоскостью).
Траверсу10ввести в гильзу4,
используя резьбовое отверстие. Палец5(2 шт.) ввести до упора его бурта в
планку12. Оседержатель13установить
на место срезанного сегмента.
Получим
Диаметр нижнего
наконечника колонны
2.
 Расчет подшипников опорно-поворотного устройства
Расчет подшипников опорно-поворотного устройства
2.1.Реакция
упорного подшипника
Выберем упорный
подшипник по статической грузоподъемности
из условия
Этому условию
удовлетворяет подшипник шариковый
упорный 8313 (прилож. 1).
Его
внутренний диаметр
высотанаружный диаметрстатическая грузоподъемностьДля равномерного нагружения шариков
установлена выпуклая и вогнутая
сферические шайбы радиусомRиз
центра верхнего радиального подшипника
(рис. 2).
2.2.Расстояние
между радиальными подшипниками (рис.
1,а) примем, исходя из соотношения
Примем
Реакции радиальных подшипников
Выберем верхний
радиальный подшипник по статической
грузоподъемности
из условия
Этому условию
удовлетворяет подшипник 222 (прилож. 2).
Его внутренний диаметр
статическая грузоподъемностьнаружный —ширина
Выберем нижний радиальный подшипник с
внутренним диаметром, равным диаметру
колонны ниже гильзы:
Подходит подшипник 136 (прилож. 2). Его
2). Его
внутренний диаметрнаружныйширинастатическая грузоподъемность
3. Компоновка опорно-поворотного устройства
3.1.
Колонну выполним из трубы 1
с наконечниками 2
и 3
(рис. 2). Диаметр нижнего наконечника3равен внутреннему диаметру нижнего
радиального подшипника. По п. 2.2Диаметр верхнего наконечника2равен
внутреннему диаметру верхнего радиального
подшипникаЗададим внутренний диаметр трубыВыберем трубу колонны стальную бесшовную
горячедеформированную, ГОСТ 8732 (прилож.
3), наружный диаметртолщина стенкиВнутренний диаметр трубы колонны
Момент сопротивления
трубы колонны изгибу
.
Условие прочности
трубы колонны по п. 1.4 выполняется с
некоторой избыточностью:
Поэтому предел
текучести трубы колонны можно задать
меньшим или равным пределу текучести
наконечника. Выберем для трубы колонны
сталь 35, для которой
(прилож. 3). Обозначение заготовки трубы
3). Обозначение заготовки трубы
колонны в спецификации:
Здесь
800кр обозначает, что длина труб в поставке
кратна 800 мм.Это соответствует длине
трубы колонны.
3.2.
Гильзу 4
(рис. 2) выполним из трубы с внутренним
диаметром
Это несколько
меньше, чем наружный диаметр нижнего
радиального подшипника. Припуск 4–6 мм
(рис. 2) снимают в процессе расточки под
подшипник. Примем,
Толщина стенки трубы гильзы4несколько меньше, чем у трубы колонны1, т.е.Тогда наружный диаметр трубы гильзы
составит 325 мм. Выберем трубу гильзы
(прилож. 3):
Сталь Б10 менее
прочна, чем сталь В35, но прочность гильзы
окажется, по-видимому, достаточной, так
как гильза имеет значительно больший
диаметр, чем колонна. Это проверяют
нижеследующим расчетом, который не
является обязательным.
3.3.
Расчет гильзы
на прочность. Согласно эпюре изгибающих
Согласно эпюре изгибающих
моментов (рис. 1, б,
в)
опасное сечение гильзы находится на
уровне верхнего радиального подшипника.
Момент, изгибающий гильзу:
Момент сопротивления
гильзы
Напряжение изгиба
в расчетном сечении гильзы
Коэффициент запаса
прочности гильзы
где
— коэффициент запаса прочности. Очевидно,
что гильза имеет избыточную прочность
в расчетном сечении.
3.4.Расчет
пальцев5(рис. 2) на смятие и срез под
действием усилия, равного реакции
упорного подшипника, здесь не приводится,
так как легко выполним с помощью
литературы по «Деталям машин».
Статический расчет одноковшовых экскаваторов
Статический расчет одноковшовых экскаваторов
Целью статического расчета экскаватора является определение условий уравновешивания поворотной платформы, проверка устойчивости экскаватора и определение реакций опорных катков, катков-захватов н центрирующей цапфы.
Для уравновешивания поворотной платформы служит противовес, который выбирают из условия, согласно которому равнодействующая всех сил, действующих со стороны поворотной платформы, не должна выходить за пределы опорно-поворотного круга. Однако полностью уравновесить поворотную платформу нельзя. Поэтому предполагается, что неуравновешенная часть нагрузки будет восприниматься катками-захватами. Руководствуясь этим соображением, вес противовеса выбирают по условным расчетным схемам. Противовес рассчитывается для прямой лопаты и проверяется для других видов рабочего оборудования. Следует стремиться к тому, чтобы выбранный противовес удовлетворял по возможности большему числу сменного рабочего оборудования. Если это Не удается, то выбирают противовесы для отдельных групп оборудования. При расчете определяются два значения силы тяжести противовеса. Одно значение соответствует возможности опрокидывания поворотной платформы «вперед», т. е. в сторону рабочего оборудования, а другое значение определяется исходя из возможности опрокидывания платформы «назад», т. е. в сторону противовеса. Выбранная сила тяжести противовеса не Должна быть меньше того значения, которое соответствует опрокидыванию платформы вперед, и вместе с тем не должна превышать того значения, которое соответствует опрокидыванию платформы назад. При несоблюдении этого условия надлежит пересмотреть компоновку оборудования на поворотной платформе.
е. в сторону противовеса. Выбранная сила тяжести противовеса не Должна быть меньше того значения, которое соответствует опрокидыванию платформы вперед, и вместе с тем не должна превышать того значения, которое соответствует опрокидыванию платформы назад. При несоблюдении этого условия надлежит пересмотреть компоновку оборудования на поворотной платформе.
При оборудовании прямой лопаты сила тяжести противовеса при опрокидывании поворотной платформы «вперед» определяется при наклоне стрелы, равном 35—40°. Предполагается, что ковш груженый, рукоять горизонтальна и выдвинута на 2/а своего хода в случае малых и средних машин и Полностью выдвинута в случае машин большой мощности. Сопротивление грунта копанию не учитывается, так как предполагается, что оно воспринимается роликами-захватами.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 93. Расчетная схема для определения противовеса при оборудовании обратной лопаты: а — при опрокидывании поворотной платформы вперед; б — при опрокидывании поворотной платформы назад
При определении силы тяжести противовеса, способной опрокинуть платформу назад предполагается, что ковш при максимальном вылете опущен на землю. Для определения противовеса следует составить уравнение равновесия относительно заднего опорного катка (точка А на рис. 93, б). При этом предполагается, что вес ковша полностью воспринимается грунтом н в опрокидывании платформы участвует половина веса рукояти и стрелы. По найденным таким образом значениям сил тяжести противовеса окончательный его выбор производится так же, как и в случае прямой лопаты.
Для определения противовеса следует составить уравнение равновесия относительно заднего опорного катка (точка А на рис. 93, б). При этом предполагается, что вес ковша полностью воспринимается грунтом н в опрокидывании платформы участвует половина веса рукояти и стрелы. По найденным таким образом значениям сил тяжести противовеса окончательный его выбор производится так же, как и в случае прямой лопаты.
Расчетная схема для определения силы тяжести противовеса при опрокидывании поворотной платформы назад дана на рис. 92, б. Здесь стрела расположена под углом к горизонту 55—60°, ковш разгружен, оперт на грунт и находится у пяты стрелы. Сила тяжести противовеса находится из уравнения моментов всех сил относительно заднего опорного катка (точка А)
Если в результате окажется, что gn2 >gnl, то силу тяжести противовеса следует выбирать между этими значениями — ближе к gnl. Когда gnl > gni, то произойдет опрокидывание платформы назад. Это указывает на то, что агрегаты и механизмы на поворотной платформе слишком выдвинуты вперед. Пользуясь методом веревочного многоугольника, противовес можно определить графически.
Пользуясь методом веревочного многоугольника, противовес можно определить графически.
При оборудовании обратной лопаты сила тяжести противовеса, препятствующего опрокидыванию поворотной платформы вперед, выбирается согласно расчетной схеме (рис. 93, а). Здесь предполагается, что груженый ковш вышел из забоя, и экскаватор начинает поворот на выгрузку.
В случае оборудования драглайном при рассмотрении возможности опрокидывания платформы вперед предполагается, что производится подъем груженого ковша, а стрела по отношению к горизонту наклонена под углом 30°.
Сила тяжести противовеса при опрокидывании назад определяется при опущенном на грунт ковше и при угле наклона стрелы 45—50 .
Устойчивость прямой лопаты проверяется в двух рабочих положениях. Первое положение соответствует концу копания, когда рукоять горизонтальна и выдвинута до конца, а угол наклона стрелы а = 35-40°. Опрокидывание машины возможно относительно края гусеничного хода (точка А) на рис. 94.
В этом положении на ковш действует сила Р01, которая определяется из уравнения равновесия относительно оси напорного вала всех сил, действующих на ковш и рукоять.
Рис. 94. Расчетная схема к проверке устойчивости экскаватора при оборудовании прямой лопаты
При этом сила подъема Sn определяется по мощности двигателя. При многомоторном приводе при рассмотрении устойчивости следует учесть также напорное усилие, развивающееся при взятии рукояти «на себя» и способствующее опрокидыванию машины. Однако это усилие учитывают только при расчете машин большой мощности, для которых проверка на устойчивость особенно важна.
Рис. 96. Схема к расчету устойчивости при оборудовании драглайна
Рис. 97. Схема для определения реакции опорных катков, катков-захватов и центрирующей цапфы
Наибольшие значения нагрузки на опорно-поворотное устройство имеет место при оборудовании крана, драглайна и грейфера. Тем не менее эти определения следует проводить для всех видов рабочего оборудования. На рис. 97 представлена расчетная схема, составленная применительно к оборудованию прямой лопаты. Предполагается, что стрела расположена под углом а = 25 = 30° и сила Р01 определяется в предположении, что мощность двигателя расходуется только на подъем ковша.
На рис. 97 представлена расчетная схема, составленная применительно к оборудованию прямой лопаты. Предполагается, что стрела расположена под углом а = 25 = 30° и сила Р01 определяется в предположении, что мощность двигателя расходуется только на подъем ковша.
Реакция передних катков находится в предположении отсутствия катков-захватов и центрирующей цапфы из уравнения моментов всех сил относительно оси вращения платформы.
Определение размеров противовеса — [ПЗ] Лифт Q=400 13 этаж — курсовая работа лифт
Единственный в мире Музей Смайликов Самая яркая достопримечательность Крыма | Скачать 2.35 Mb.
|
 35 Mb.
35 Mb. С этим файлом связано 1 файл(ов). Среди них: Титульник курсач.doc. Подборка по базе: Проведение выборов.docx, 1.1 Обоснование актуальности темы.docx, Презентация Выбор профессий.pptx, Расчет геометрических параметров и ДН антенны.docx, Экономический выбор — StudentLib.com.rtf, Точечные и интервальные оценки параметров.docx, курс по выбору 10 кл..docx, ПР1 — Единицы измерения параметров колебаний.docx, Мой выбор профессии.docx, КЧ Выбор профессии.docx 1 2 3 4 5 6 7 8 9 10 11 2.2 Определение размеров противовеса Размера противовеса зависят от его массы, а также размеров и веса грузов, которые изготавливаются из чугуна и железобетона. Следует учитывать, что масса каркаса составляет от 15 до 20 % веса противовеса. Рис. 3. Размеры груза противовеса. Таблица 1 Размеры грузов противовеса для пассажирских лифтов
Ориентировочные размеры противовеса в плане: Длина L = L1 + 50 = 860 + 50 = 910 мм, Ширина Е = Е1 + 20 = 140 + 20 = 160 мм. Максимальная высота противовеса может превышать высоту каркаса кабины не более чем на 500 мм, если ориентироваться на высоту по балкам. 2.3. Электрооборудование На плане шахты, кроме кабины, противовеса, направляющих с кронштейнами крепления, тяговых канатов кабины и противовеса, канатов ограничителя скорости, изображаются аппараты и оборудование цепи управления и сигнализации лифта. К ним относятся: клеммная коробка подключения подвесного кабеля, сам кабель, а также этажный переключатель, датчик точной остановки и шунт датчика точной остановки, места на плане для установки указанного электрооборудования выбирается с учетом исключения взаимных помех работе всего оборудования, устанавливаемого в шахте и на кабине. Этажный датчик и шунт точной остановки с помощью специальных кронштейнов крепится к направляющей кабины на каждом этаже. Датчик точной остановки размещается на кабине. При скорости кабины 1 м/с этажный переключатель заменяется датчиком, а на кабине устанавливается шунт, с которым он взаимодействует. Количество ниток подвесных кабелей зависит от степени сложности схемы управления лифтом, которая находится в определенной связи со скоростья движения. Поэтому в лифтах со скоростью движения 1 м/с — 2 нитки. При верхнем расположении машинного помещения диаметр КВШ подбирается таким образом, чтобы обойтись без отводного шкива. Размеры этих помещений выбирается с учетом рекомендаций статей 6.1.5; 6.1.6; 6.1.9; 6.1.10 ПУБЭЛ. На плане машинного помещения показываются: лебедка лифта, ограничитель скорости, панель управления, вводное устройство, трансформаторы цепей управления, сигнализация и освещение, резиновые коврики. Места расположения данного оборудования определяются размерами до стен машинного помещения или осей кабины и противовеса.
Под термином « статический расчёт лифта» подразумевается расчёт и проектирование основных элементов конструкции механизма подъема без учёта действия инерционных сил при разгоне и замедлении кабины. В качестве внешних сил рассматриваются только силы тяжести подвижных частей лифта и силы трения между балками кабины (противовеса) и направляющими. В результате статического расчёта определяются массы подвижных элементов, параметры канатоведущего органа, двигателя, редуктора и тормоза.
Кинематической схемой лифта принято называть схему передачи движения с подъемного механизма на кабину и противовес, который не является неотъемлемой частью лифта. Наиболее распространенной системой передачи движения от привода механизма подъема на кабину (противовес) является канатная система, представленная на рис.4. Рисунок 4: кинематическая схема лифтов с канатной подвеской кабины Используя методику первой главы, определяются геометрические характеристики кабины (в метрах): А = 0,935 м – ширина; В = 1,1,035м – глубина; h = 2,100 м – высота. Масса кабины (кг) может определяться по эмпирической формуле: Qk = 550 ∙ А ∙ В = 550 ∙ 0,935 ∙ 1,035 = 532 кг. Расчет канатов ведется по разрывному усилию на статическую нагрузку: P≥S∙n где Р – разрывное усилие каната в целом, принимаемое по данным сертификата, кН; S – расчетное статическое натяжение каната, кН; п – коэффициент запаса прочности, величина которого принимается по данным таблице, п = 14. Расчетное статическое натяжение каната: где m – число параллельных ветвей канатов подвески кабины, равное 3; Un – кратность полиспаста; Q – номинальная грузоподъемность лифта, кг; Qk – масса кабины, кг.; Qmk – масса тягового каната, кг. Масса тягового каната рассчитывается с условием, что кабина лифта находится на нижней посадочной площадке: 1 2 3 4 5 6 7 8 9 10 11 | |||||||||||||||


 Из условий компоновки необходимый размер КВШ: D = 700 мм.
Из условий компоновки необходимый размер КВШ: D = 700 мм. Полученные данные служат основой для проведения динамического расчета и конечной стадии проектирования могут уточняться.
Полученные данные служат основой для проведения динамического расчета и конечной стадии проектирования могут уточняться.
Четыре главные ошибки установки консоли при монтаже фасадной люльки ZLP-630
Несущая конструкция консоли фасадного подъёмника ZLP-630 работает в широком диапазоне механических нагрузок. Её безопасная эксплуатация определяется соблюдением всех требований монтажной технологии. Специалисты составили перечень наиболее характерных ошибок.
Её безопасная эксплуатация определяется соблюдением всех требований монтажной технологии. Специалисты составили перечень наиболее характерных ошибок.
Отсутствие или неправильная установка противовеса
В качестве противовеса используются бетонные блоки суммарным весом 900 кг. Паспортную грузоподъёмность люльки подъёмника в 630 кг, можно задействовать только после правильной установки всего прилагаемого комплекта.
Стандартные ошибки монтажа – это, прежде всего:
-
Неполный комплект размещённых на раме противовесов. В такой ситуации снижается производительность и грузоподъёмность системы, повышается риск опрокидывания люльки. -
Отсутствие противовесов может инициировать опрокидывание загрузочного контейнера даже при небольшой нагрузке, и даже падение конструкции с крыши возводимого объекта. -
При неравномерной укладке противовесов нарушается центровка. Люлька подъемник фасадный zlp-630 с консолями может опрокинуться или завалиться при боковом ветре, а также вследствии неравномерной загрузки.
Люлька подъемник фасадный zlp-630 с консолями может опрокинуться или завалиться при боковом ветре, а также вследствии неравномерной загрузки.
-
Велика вероятность падения незакреплённых на раме бетонно-блочных противовесов с последующим опрокидыванием всей конструкции. Ещё одна критическая ошибка — это отсутствие или низкая надёжность фиксации консоли к несущей конструкции здания. -
Недопустима замена блочных противовесов кирпичом или другими подручными материалами. Суммарный вес может не соответствовать заявленным нормативам, а небрежная и ненадёжная фиксация может создать аварийную ситуацию. -
При наличии любого нарушения, эксплуатация фасадного подъёмника запрещается до полного устранения недостатков. Продолжение работ с неисправным оборудованием грозит отстранением подъёмного оборудования от работ и наложением масштабных штрафных санкций.
 Люлька подъемник фасадный zlp-630 с консолями может опрокинуться или завалиться при боковом ветре, а также вследствии неравномерной загрузки.
Люлька подъемник фасадный zlp-630 с консолями может опрокинуться или завалиться при боковом ветре, а также вследствии неравномерной загрузки.

Повторный ввод в эксплуатацию будет возможен после полного освидетельствования подъёмника специалистами технического надзора с последующим оформлением разрешительной документации.
Топ продаж фасадных люлек
Фасадный подъемник ZLP-630 6 м
223 200 руб
Заказать
Фасадный подъемник ZLP-630 4м
Заказать
Фасадный подъемник ZLP-630 2м
Заказать
Люлька двухместная 3851Б
Заказать
В перечень серьёзных нарушений входит отсутствие фирменной маркировки, а также таблички с указанием грузоподъёмности и сроков регламентных работ.
Неправильная установка консолей фасадных люлек
Последовательность и особенности монтажа консолей подробно указаны в технологических карточках и Правилах техники безопасности. Стандартная практика – установка консоли с таким расчётом, чтобы её силовые элементы находились к фасадной плоскости под прямым углом.
С некоторыми ограничениями, установка балок допускается под небольшим углом. При этом следует учитывать:
-
существенное снижение грузоподъёмности конструкции в целом; -
увеличение реального риска бокового опрокидывания; -
более сложное управление подъёмником из-за расположения люльки под углом к фасадной плоскости здания.
Установка балок под углом допускается в случае сложной, изогнутой, выпуклой или ломаной конфигурации фасада. Особенно важно, чтобы нестандартный монтаж соответствовал всем требованиям проектной документации.
Монтаж консоли подъёмника без передней опоры
При наличии высокого и прочного парапета некоторые монтажники используют его для фиксации консоли без передней опоры. Такая схема может инициировать аварийную ситуацию. Поскольку прочность парапета точно не известна, разовое или постоянное воздействие механических нагрузок не исключает разрушения парапета и падения самого подъёмника.
-
Передняя опора используется для эффективной стабилизации консоли, предотвращения опрокидывания при неравномерном распределении нагрузок. При отсутствии этого силового элемента эксплуатация конструкции небезопасна. -
Регулируемый кронштейн выставляется с таким расчётом, чтобы исключить касание передней балки о верхнюю плоскость парапета. Такая схема не допускается даже при наличии передней опоры.
Вместе с передней опорой при монтаже фасадной люльки используется передний кронштейн. Его высота является регулируемой. Ее выставляют так, чтобы передняя балка располагалась над парапетом крыши, не касаясь его. Опирать переднюю балку на парапет нельзя даже в случае, если передняя опора установлена.
Неправильный расчёт длины базовых элементов консоли
При правильном монтаже противовесов, стабильность рабочей платформы обеспечивает правильный расчёт длины передней балки и расстояния между опорами. Для подъемника ZLP-630 стандартные параметры приводятся в прилагаемой инструкции. В частности:
Для подъемника ZLP-630 стандартные параметры приводятся в прилагаемой инструкции. В частности:
-
При полной комплектации противовесов и высоте подъёма люльки 50 метров, рекомендованный вынос консоли не должен превышать 1,5 метра, а расстояние между опорами в пределах не более 460 метра. -
За счёт снижения грузоподъёмности с 630 до 540 кг допускается увеличение вылета консоли до 170 и незначительное, до 440 см, уменьшение расстояния между опорами. -
Высота подъёма 100 м предполагает уменьшение длины балки до 130 см, а расстояние между опорами более 460 см. Вынос консоли 150 см ограничивает грузоподъёмности люльки до 540 кг.
Произвольное изменение длины выноса передней балки отрицательно сказывается на устойчивости самой конструкции, снижении грузоподъёмности, большей вероятности возникновения аварийных ситуаций. В особых случаях, изменение приведённых параметров допускается, при наличии специальных допусков и разрешений в проектной документации.
В особых случаях, изменение приведённых параметров допускается, при наличии специальных допусков и разрешений в проектной документации.
Список монтажных ошибок включает в себя неправильное размещение и фиксацию средней балки. Некачественный монтаж сказывается на уменьшении выноса консоли и существенном снижении её грузоподъёмности.
Также не допускаются недостатки в болтовых соединениях, применение некондиционных расходников, отсутствие фиксирующих гроверных шайб и контрогаек. Подъёмное оборудование не допускается к работе до полного устранения отмеченных недостатков.
Также стоит почитать:
Правильная установка консолей для фасадных подъемников
Монтаж фасадных люлек
Нужно ли регистрировать подъемник в Ростехнадзоре?
Особенности монтажа мачтовых подъемников ПМГ 500 И ПМГ 1000
Аренда ZLP 630 по системе all inclusive, или почему стоит пользоваться услугами собственника?
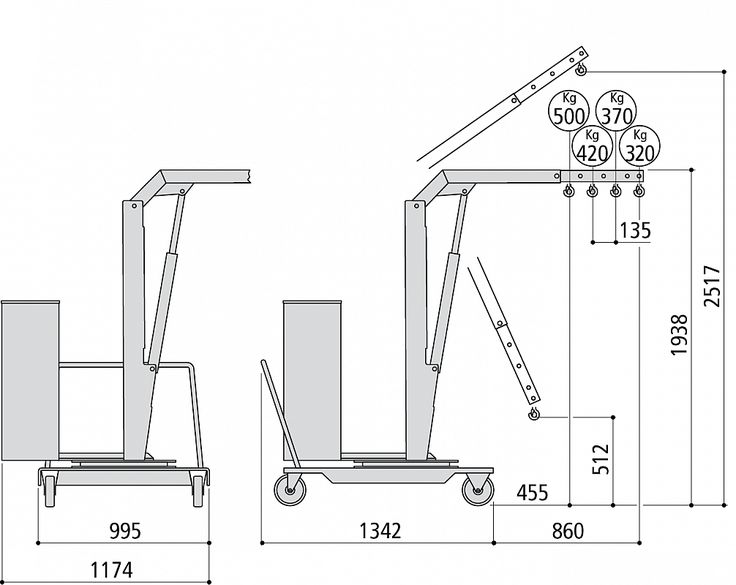
Пример решения задачи.
 Определить вес противовеса Q для работы автокрана ( схема его дана на рисунке С.3) без выносных опор грузом весом Р при вылете стрелы равном L
Определить вес противовеса Q для работы автокрана ( схема его дана на рисунке С.3) без выносных опор грузом весом Р при вылете стрелы равном L
Поделись
Определить вес противовеса Q для работы автокрана ( схема его дана на рисунке С.3) без выносных опор грузом весом Р при вылете стрелы равном L. Коэффициент устойчивость принять равным- k=1,2.
Известно: вес крана со стрелой равен G; центр тяжести крана расположен от оси его симметрии на расстоянии b; расстояние между колёсами равно 2а; центр тяжести противовеса должен находиться от оси симметрии крана на расстоянии d.
Рис. С3.
Решение:1.При работе с грузом ;
2. ;
3.При =1,2 ;
В некоторых случаях проводят расчеты на устойчивость и при работе крана без груза. Опрокидывающий момент от веса противовеса при любых положениях крана должен быть в k раз меньше удерживающего момента от веса самого крана.
Варианты заданий
Вариант 1
Вертикальная стена высотойh подвержена действию горизонтального давления ветра , дующего справа. Определить необходимую толщину стены , если удельное давление ветра равно q ,удельный вес кладкиγ ,а коэффициент устойчивости равен k (рис. С3.1). Исходные данные сведены в таблицу 1.
Рис.С3.1
Таблица 1
| данные
вариант | h
м | q
н/м2 | γ
кН/м3 | k |
| 2,0 | ||||
| 1,8 | ||||
| 1,7 | ||||
| 1,6 | ||||
| 1,5 | ||||
| 1,4 | ||||
| 1,3 |
Вариант 2
Определить коэффициент устойчивости кирпичного столба , если ширина его а, толщинаb, высота h, давление ветра qнормальнок поверхности столба. Удельный вес кладки γ( рис.С3.2). Исходные данные сведены в таблицу 2.
Удельный вес кладки γ( рис.С3.2). Исходные данные сведены в таблицу 2.
Рис.С3.2
Таблица 2
| данные
вариант | а
м | b
м | h
м | q
н/м2 | γ
кН/м3 |
| 1,0 | 0,7 | ||||
| 0,9 | 0,6 | ||||
| 0,8 | 0,5 | ||||
| 0,7 | 0,4 | ||||
| 0,6 | 0,6 | ||||
| 1,1 | 0,7 | ||||
| 0,8 | 0,8 |
Вариант 3
Подъемный кран установлен на каменном фундаменте ( рис. С3.3). Вес крана Gприложен в его центре Cтяжести на расстоянииbот оси крана. Вылет крана l .Фундамент имеет квадратное основание a; удельный вес материала фундамента γ .Вычислитьнеобходимую высотуhфундамента, если грузоподъемность крана P, а коэффициент устойчивости его k.Исходные данные сведены в таблицу 3.
С3.3). Вес крана Gприложен в его центре Cтяжести на расстоянииbот оси крана. Вылет крана l .Фундамент имеет квадратное основание a; удельный вес материала фундамента γ .Вычислитьнеобходимую высотуhфундамента, если грузоподъемность крана P, а коэффициент устойчивости его k.Исходные данные сведены в таблицу 3.
Рис.С3.3
Таблица 3
| данные
вариант | G
кН | b
м | l
м | а
м | γ
кН/м3 | Р
кН | k |
| 0,75 | 4,0 | 2,0 | 2,0 | ||||
| 0,70 | 3,5 | 2,2 | 1,9 | ||||
| 0,75 | 4,0 | 2,1 | 1,8 | ||||
| 0,70 | 3,5 | 2,3 | 1,7 | ||||
| 0,75 | 4,2 | 1,8 | 1,6 | ||||
| 0,70 | 4,0 | 2,0 | 1,5 | ||||
| 0,75 | 4,0 | 2,2 | 1,8 |
Вариант 4
Вес показанного на рис. С3.4 передвижного поворотного крана без противовеса равен G,причем этот вес действует по прямой, проходящей на расстоянии bот вертикали, проведенной к рельсу А.Тележка крана рассчитана на подъемную силу, равную Р, вылет крана равен l. Определить, каким должен быть наименьший вес противовеса Qи наибольшее расстояние xот центра тяжести до вертикали левого рельса b, для того, чтобы кран не опрокинулся при полностью нагруженной тележке. Расстояние АВ равно 2,5 м.Исходящие данные сведены в таблицу 4.
С3.4 передвижного поворотного крана без противовеса равен G,причем этот вес действует по прямой, проходящей на расстоянии bот вертикали, проведенной к рельсу А.Тележка крана рассчитана на подъемную силу, равную Р, вылет крана равен l. Определить, каким должен быть наименьший вес противовеса Qи наибольшее расстояние xот центра тяжести до вертикали левого рельса b, для того, чтобы кран не опрокинулся при полностью нагруженной тележке. Расстояние АВ равно 2,5 м.Исходящие данные сведены в таблицу 4.
Рис.С.3.4
Таблица 4
| данные
варианты | G
кН | b
м | Р
кН | l
м |
| 1,5 | ||||
| 1,3 | ||||
| 1,2 | ||||
| 1,1 | ||||
| 1,0 | ||||
| 1,4 | ||||
| 1,3 |
Вариант 5
Земляная насыпь подпирается вертикальной каменной стеной высотой h,причем удельный вес кладки γ. Какой должна быть толщинаа стены, если известно, что давление на нее земли Q направлено горизонтально и приложено на 1/3 высоты стены (рис.С3.5). Исходные данные сведены в таблицу 5.
Какой должна быть толщинаа стены, если известно, что давление на нее земли Q направлено горизонтально и приложено на 1/3 высоты стены (рис.С3.5). Исходные данные сведены в таблицу 5.
Рис.С.3.5
Таблица5
| Варианты
данные | |||||||
| γ кН/м3 | |||||||
| Q кН/м |
Литература
Статический расчет одноковшовых экскаваторов.
Цель статического расчета – определение условий устойчивости экскаватора во всех возможных случаях его эксплуатации. Устойчивость достигается соответствующим сочетанием масс механизмов, оборудования и металлоконструкций.
В задачу статистического расчета входит: уравновешивание поворотной платформы, определение противовеса и проверка общей устойчивости экскаватора, а также определение реакций опорных катков платформы, захватов и центрирующей цапфы.
Поворотная платформа находится в равновесии при условии, что результирующая сил тяжести поворотной части экскаватора не выходит за пределы опорного периметра, проходящего через срединные точки линий контактов катков с опорным кругом катания при повороте платформы. Это же условие служит основанием для определения минимального веса противовеса. Его рассчитывают для оборудования экскаватора прямой лопатой и проверяют для других видов рабочего оборудования.
Расчет производится для двух положений загрузки ковша: первый соответствует возможности выхода результирующей сил тяжести поворотной части экскаватора за пределы опорного периметра в сторону противовеса (назад).
Возможность опрокидывания вперед поворотной платформы экскаватора, оборудованной прямой лопатой проверяют для положения, когда стрела наклонена под углом к горизонту на 30-400, рукоять горизонтальна и выдвинута на 2/3 своего хода, ковш наполнен грунтом, рабочее оборудование расположено вдоль гусениц.
При этом вес противовеса Gвпр можно определить из уравнения равновесия относительно точки В (рис. 5.24 а ):
; (5.37)
Возможность опрокидывания поворотной платформы назад проверяют для положения, при котором стрела наклонена под углом 55-600 к горизонту рукоять вертикальна, ковш без грунта находится у пяты стрелы и оперт на грунт. Значение Gнпр находят из уравнения моментов сил относительно точки А (рис. 5.24 б):
; (5.38)
Принятый вес Gф находится из уравнения:
Gнпр< Gф>Gвпр ; (5. 39)
39)
При проверке противовеса обратной лопаты для случая опрокидывания вперед предполагают, что груженый ковш вышел из забоя и экскаватор начинает поворачиваться на выгрузку. Для случая опрокидывания платформы назад предполагают, что ковш при максимальном вылете рукояти опущен на землю, его масса полностью воспринимается грунтом, а на платформу действует половина веса рукояти и стрелы. Для обоих случаев составляют уравнения моментов сил относительно точек А и В.
Рис. 5.24 Схема к определению веса противовеса при рабочем оборудовании прямая лопата: а – случай опрокидывания вперед; б – то же, назад.
Противовес при оборудовании драглайна проверяют по тем же зависимостям, что и для прямой лопаты. При проверке на опрокидывание вперед считается, что груженый ковш поднимается, стрела наклонена к горизонту на угол 300, при опрокидывании назад — ковш опущен на грунт, угол наклона стрелы составляет 45-500.
Общую устойчивость экскаватора с прямой лопатой проверяют при двух рабочих и двух транспортных положениях. Одно из рабочих положений соответствует самому неблагоприятному случаю работы, второе – преодолению препятствий в грунтовом массиве. В транспортных положениях проверка выполняется для преодоления наибольшего заданного подъема и спуска по максимальному заданному уклону.
Наиболее неблагоприятный случай производства работ соответствует положению ковша, при котором его режущая кромка находится на уровне оси напорного вала, ковш наполнен грунтом, рукоять выдвинута к горизонту под углом 35-400, рабочее оборудование расположено поперек гусениц, работа происходит на горизонтальной площадке (рис. 5.25).
Устойчивость оценивают коэффициентом устойчивости Ку, определяемым по формуле:
; (5.40)
где ΣМу – сумма моментов сил, удерживающих экскаватор от опрокидывания; ΣМ0 – сумма моментов сил, опрокидывающих экскаватор.
Коэффициент рабочей устойчивости определяют из уравнения равновесия сил, действующих на машину относительно точки А.
Для универсальных одноковшовых экскаваторов с прямой лопатой Ку=1,05…1,1.
Расчет на преодоление препятствия в грунтовом массиве выполняют при следующих условиях: рабочая площадка горизонтальна, стрела наклонена под углом 450 к горизонту, подъемный канат – вертикальный, рабочее оборудование расположено поперек гусениц, касательная к траектории резания реакция грунта – максимальная, а параллельная к траектории резания реакция грунта равна нулю.
Рис. 5.25 Схема к определению рабочей устойчивости экскаватора, оборудованного прямой лопатой.
Касательная к траектории копания реакция грунта Рк зависит от максимального подъемного усилия Рпод и определяется из условия равновесия всех сил, действующих на ковш без грунта и рукоять относительно оси напорного вала.
Усилие Рпод при однодвигательном приводе определяется исходя из передачи всей мощности двигателя на подъем, а при многодвигательном приводе соответствует стопорному моменту на валу подъемного двигателя.
Устойчивость экскаватора для случая преодоления наибольшего подъема проверяется при условии, что рабочее оборудование направлено в сторону перемещения экскаватора, стрела наклонена под минимальным рабочим углом к поверхности площадки, рукоять выдвинута полностью, ковш без грунта находится у земли, направление ветра встречное с давлением р=0,25 кПа, Ку=1,2.
Для случая движения под уклон устойчивость проверяется при максимальном угле наклона стрелы к поверхности площадки, свободно висящей рукояти и такими же положениями ковша, давлением и направлением ветра и запасом устойчивости, как и в предыдущем случае.
Общую силу от действия ветра определяют по формуле:
; (5.41)
где F – наветренная площадь стрелы и кабины, м2.
Устойчивость обратной лопаты проверяют по двум расчетным схемам. В первом случае предполагает, что ковш встретил непреодолимое препятствие при выходе из забоя. Тяговый барабан при этом заторможен, и вся мощность двигателя расходуется на подъем рабочего оборудования.
Второе расчетное положение соответствует разгрузке липкого грунта на максимальном вылете ковша.
Устойчивость драглайна проверяют в положении, соответствующим повороту его на выгрузку. Угол наклона стрелы принимают равным 25-300. При этом ковш наполнен грунтом и подтянут к голове стрелы, экскаватор работает на уклоне с углом 3-50. Кроме весовых и ветровой нагрузок дополнительно учитываются силы инерции стрелы и ковша с грунтом.
Реакции опорных катков, захватов и центрирующей цапфы определяют при оборудовании прямой лопатой, когда реакции наибольшие. Расчет ведут по наиболее неблагоприятному случаю, возникающему при направлении стрелы в плане на угол гусениц, угол наклона стрелы при этом принимается наименьшим.
Дата добавления: 2016-06-29; просмотров: 4800; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Расчет балансировки противовесов EQ? — Крепления
#1
Майкл Моррис
Размещено 02 апреля 2017 г. — 11:00
Голова болит! Я пытался решить проблему ниже, но я не могу ее разгадать.
Недавно я купил крепление EQ8 (HBX 110), на которое я вешу целых 33 кг трех оптических прицелов, ласточкиного хвоста, двойной монтажной планки и камер. Крепление поставляется с 2 противовесами по 10 кг, которые на данный момент мне нужно разместить по центру примерно на 25 см вдоль 39планка типа «ласточкин хвост» длиной см для балансировки системы. Все, что я прочитал, говорит о том, что размещать эти тяжелые противовесы так далеко вдоль стержня противовеса — не лучшая идея, и мне было бы намного лучше разместить больший вес ближе к точке поворота системы.
К сожалению, Skywatcher производит только противовесы весом 10 кг, которые подходят для EQ8 типа «ласточкин хвост». Если я в настоящее время уравновешиваю систему с 20-килограммовыми противовесами, центрированными в 40 см от точки вращения (26 см вдоль стержня, который начинается в 15 см от точки вращения), как бы я работал, если бы я должен был центрировать 3 x 10 кг вдоль стержня противовеса? . (Я не хочу покупать дополнительные 10 кг противовеса только для того, чтобы обнаружить, что это слишком много).
Спасибо
Под редакцией Майкла Морриса, 02 апреля 2017 г., 11:01.
- Наверх
#2
барон555
Размещено 02 апреля 2017 г. — 11:20
Просто сила, умноженная на расстояние.
- Наверх
#3
msl615
Размещено 02 апреля 2017 г. — 11:46
Обычно вы слышите об этих силах, используя понятие «фут-фунт». То есть произведение расстояния на массу. Подумайте о палке длиной 1 фут с грузом в 1 фунт на конце. Для его удержания потребуется «1 фут-фунт». Выяснить это с нуля для вашей системы было бы сложно, потому что мы не знали бы, как распределяются ваши оптические устройства и т. д. К счастью, вы уже выполнили экспериментальную работу, и мы можем использовать ваши текущие результаты:
Уравновешивает 20 кг при 40 см. Вам не нужно конвертировать в футы или фунты, вы можете просто умножить их, чтобы получить «800 см-кг».
Таким образом, если у вас есть вес 30 кг, его центр должен быть равен (800 см-кг) / 30 кг = около 26 см общей длины. Если я понимаю вашу систему, то это будет 26-15=11 см по планке. Теоретически, это тонкий вес 30 кг именно в этот момент. У вас толстые гири, и вы должны быть в состоянии расположить три из них по центру отметки 11 см на грифе.
Помогает?
Майк
- Наверх
#4
РТЛР 12
Опубликовано 02 апреля 2017 г. — 11:53
Помогает?
http://www.robincasa…WeightCalc.html
- Наверх
#5
Майкл Моррис
Размещено 02 апреля 2017 г. — 12:32
Спасибо Ребята
К сожалению, на мой взгляд, это слишком тесно. По сути, это означало бы, что все три противовеса должны быть прямо наверху руля с запасом всего в 1 см. Если я сниму с крепления что-нибудь существенное, мне придется снять один из 10-килограммовых противовесов.
Я думаю, что лучше всего установить 2 противовеса по 10 кг ближе к верхней части штанги противовеса и купить подержанный противовес Skywatcher весом 5 кг. Я мог бы попросить моего друга Криса выточить середину этого дополнительного веса в 5 кг (чтобы он поместился на руле гораздо большего диаметра EQ8), это уменьшит вес примерно до 4 кг. Затем я мог использовать 4-килограммовый груз на конце штанги, чтобы точно настроить баланс.
Под редакцией Майкла Морриса, 02 апреля 2017 г., 12:32.
- Наверх
#6
msl615
Размещено 02 апреля 2017 г. — 16:47
В этом есть смысл… разместите большую часть веса в верхней части грифа, но не достаточно близко, чтобы вызвать механические проблемы, затем меньшие веса отодвиньте подальше для балансировки. Удачи с вашим проектом!
Майк
- Наверх
Машиностроение — Помогите с простым расчетом необходимой массы противовеса для горизонтального люка
Задавать вопрос
спросил
Изменено
5 лет, 1 месяц назад
Просмотрено
3к раз
$\begingroup$
Здравствуйте, товарищи инженеры,
Друг частично строит внешний сундук для хранения. По какой-то причине материалы и размер хранилища, которые он собирается использовать, означают, что дверь тяжело поднимать и не очень практично. Я предложил ему изготовить систему противовеса, чтобы помочь открыть дверь.
Я попытался рассчитать требуемый вес путем моделирования с использованием простых моментов и уравновешивающих сил, но я не доволен результатом, так как уверен, что в моей модели чего-то не хватает.
Пожалуйста, посмотрите этот эскиз и мои 2 набора для расчета. (Я смоделировал это как простую задачу статического шкива.)
Поскольку я смоделировал это как проблему статики, моя проблема заключается в том, как учесть силу, приложенную человеком, поднимающим дверь, которая, как я предполагал, будет приложена к петле.
Если предположить, что мои уравнения верны, по мере увеличения тета T1 должно уменьшаться, поскольку M2, очевидно, постоянно. Но разве напряжение не постоянно?
Кажется, я почти у цели, но, возможно, мне нужен толчок в правильном направлении. .. Давненько я не делал ничего подобного!
Спасибо.
- машиностроение
- прикладная механика
$\endgroup$
6
$\begingroup$
Поскольку вы считали свою модель статичной — это правильно, пока вещи не начнут двигаться. Вы правы, по мере увеличения теты T1 должен уменьшаться, чтобы сохранять равновесие (статическая проблема).
Напряжение постоянное. Но когда вы прикладываете дополнительную силу, это уже не $M_2g$, и поэтому все движется.
Если вы хотите выбрать правильный вес $M_2$, рассмотрите две следующие статические ситуации.
Закрытый люк: Если вы выберете $M_2$ таким образом, чтобы система была сбалансирована, когда люк закрыт (макс. тета), то дополнительное небольшое усилие, приложенное для открытия люка, приведет к перемещению системы и открытию люка.
. Вы уже сделали это.Открытый люк: Если вы выберете $M_2$ так, чтобы люк был открыт (максимальное значение тета) и все сбалансировано. Тогда небольшое дополнительное усилие для закрытия люка приведет к движению, так как дополнительный момент от веса люка закроет люк. (Это минимальная необходимая масса $M_2$, если меньше, то ваш люк будет закрываться все время, если его не зафиксировать каким-то дополнительным устройством.)
Я бы выбрал массу противовеса, взяв за точку равновесия где-то между этими двумя значениями. В зависимости от точного значения будет легче закрыть/открыть люк.
Важное замечание, если горизонтальный размер люка L равен высоте шкива по вертикали, у вас есть две проблемы:
- Столкновение при открытии люка, обязательно что-то сломается в какой-то момент.
- Противовес коснется земли до того, как люк полностью откроется, поэтому стабилизировать люк в полностью открытом положении только с помощью противовеса невозможно. (или убедитесь, что он перемещается ниже уровня люка)
Если вы переместите шкив выше, чем угол тета у проушины не будет равен углу между вертикалью и канатом на шкиве (он будет 90 град-тета).
$\endgroup$
$\begingroup$
Это неполный ответ, поэтому прошу прощения. (Ограниченное время для ответа)
Я считаю, что натяжение постоянно, но вектор в положительном направлении y — нет.
Надеюсь, это поможет!
$\endgroup$
1
Твой ответ
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Обязательно, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Конструкция машины 101: Шкивы и противовесы
Шкивы и противовесы веками использовались для получения механических преимуществ в военных машинах и промышленном оборудовании. Физика, стоящая за ними, довольно проста, но их важность имеет первостепенное значение.
В современном мире шкивы и противовесы используются в самых разных областях. Например, при каждом движении лифта задействуется система шкивов и противовесов. С точки зрения конструкции машины, шкивы, пожалуй, самый простой способ получить механическое преимущество. Еще одним распространенным способом увеличения выходной силы в современной механике являются рычаги, функции которых очень похожи на шкивы.
Что такое шкив и что такое шкивные системы?
Не вдаваясь в подробности всех различных конфигураций шкивов, по своей сути шкивы состоят из колеса и троса. Шкив только с одним фиксированным колесом просто меняет направление входной силы по отношению к притягиваемой массе. Имея только одно колесо, чтобы поднять массу 100 кг (220 фунтов), вам нужно будет приложить к другому концу веревки силу, эквивалентную 100 кг (1000 ньютонов).
Когда к простой машине, которая представляет собой систему шкивов, добавляется больше колес или блоков, вы получаете все больше и больше механических преимуществ. С системой из 2 колес вы можете поднять 100-килограммовый груз, приложив всего 50 кг (110 фунтов) силы, эквивалентной веревке.
Расчет входных усилий становится немного сложнее, чем больше блоков вы добавляете, а также с различными вариантами настройки. Однако даже самые сложные системы шкивов можно понять, если сложить длины различных отрезков каната и составить уравнения на основе производных.
Пример составной системы шкивов, в которой уравнения силы подписаны и записаны. Внимательно изучите все различные уравнения, чтобы получить представление о том, как математически моделируются системы шкивов. Источник: Prolineserver/Wikimedia. Это может показаться правдой, если вы сосредоточитесь на входе и выходе, но масса того, что поднимается, всегда переводится в фиксированные точки, где шкивы прикреплены к вашей жесткой системе. Все это можно рассчитать с помощью простой физики.
Физический пример очень сложного шкивного механизма, который четко обозначает механическое преимущество, создаваемое каждой установкой. Подобные многослойные шкивы могут обеспечить наибольшую передачу усилия. Источник: StromBer/Wikimedia
Вместо того, чтобы преобразовывать силы, мы можем сказать, что система блоков и канатов управляет силами, чтобы максимизировать массу, которую вы можете поднять или переместить.
Достижение механических преимуществ с помощью противовесов
Теперь, когда у нас есть общее представление о системах шкивов, мы можем углубиться в системы противовесов, чтобы получить еще больше механических преимуществ в конструкции машины. Противовесы используются как в шкивных системах, таких как лифты, так и в рычажных системах, таких как кран. Что касается противовесов крана, все дело в моментах.
Самый популярный
Чтобы сохранить жесткость стрелы крана при подъеме груза массой 100 кг на расстоянии 10 м (32 фута) от точки опоры, вам потребуется противовес массой 1000 кг (2200 фунтов), расположенный на расстоянии 1 м (3,2 фута) от точки опоры. точки опоры с другой стороны для стабилизации стрелы крана. В кранах противовесы обычно поддерживают постоянную массу, поэтому для регулировки различных нагрузок противовес (обычно ) может перемещаться для регулировки момента. Это, очевидно, очень примитивное объяснение противовесов крана. Однако это отличный пример того, как шкивы создают механическое преимущество в системах, в которых они используются.
СВЯЗАННЫЕ: ИНЖЕНЕР ОБНАРУЖАЕТ СКРЫТОЕ ЗНАНИЕ ДАВИНЧИ О ТРЕНИИ
С точки зрения систем шкивов, противовес просто помогает прикладывать входную силу для подъема объекта. Самый простой способ продемонстрировать это — взглянуть на лифтовую систему. В типичных лифтах к другому концу системы шкивов прикреплен противовес, эквивалентный весу кабины при 50% нагрузке. Противовесы не выполняют всю работу в современных лифтах, но они помогают стабилизировать систему и снизить нагрузку на двигатель лифта.
Ниже приведены несколько различных примеров шкивов, чтобы увидеть, как они влияют на заданный вес.
Пример множества различных шкивов и сил, действующих в каждой конструкции. Вы можете видеть, что чем больше шкивов добавляется, тем меньше силы требуется для перемещения блока на такое же перемещение. Однако расстояние, на котором должна быть применена сила, также больше. Источник: Prolineserver/Wikimedia
Если предположить, что кабина лифта загружена на 25 % от ее грузоподъемности, все, что нужно двигателю, — это затормозить кабину лифта на нужном этаже (при подъеме). Противовес в лифте также означает, что если тормоз двигателя выйдет из строя, падение автомобиля будет замедлено так же быстро, как и в противном случае. Лифтовые системы в целом немного сложнее, чем описано здесь, но противовесы составляют суть их функции.
Дополнительная информация о шкивах
В частности, Destin с канала YouTube Smarter Every Day обсуждает тип шкивов, называемых рывковыми блоками. Этот тип шкива позволяет легко продевать через них веревку, так как они расходятся посередине. Это избавляет пользователя от необходимости продевать веревку или цепь через шкив в начале использования. Таким образом, рывковые блоки — отличный способ использовать физику шкивов и их механические преимущества на лету.
More Stories
инновации Безвоздушные шины, в которых используются технологии НАСА, могут положить конец проколам, сократить количество отходов и революционизировать отрасль
Крис Янг| 15.09.2022
транспортШкольные электробусы чище и дешевле в обслуживании — но у них есть 2 проблемы
Разговор| 10. 09.2022
CultureЭксперимент с биткойнами в Сальвадоре с треском провалился спустя год
The Conversation| 17.09.2022
Общие | Формула определения противовеса? | Практик Машинист
сварочный аппарат
Нержавеющая сталь
#1
Я занимаюсь строительством новой главной шахты для грохота 50-летней давности. Главный вал в основном представляет собой 4-дюймовый сплошной вал, оба конца которого смещены на 2 дюйма для некоторых 6 дюймов или около того. Эта часть не является проблемой, но нужно выяснить, как определить, сколько противовеса добавить к маховикам, которые вращаются с этим главным валом. вала.Нет надежды выяснить производителя,давно сошла на нет.Самая лучшая идея пока-это измерить существующий маховик/противовес на существующем грохоте и просто продублировать его в стали,но мне было интересно,есть ли какая-то формула чтобы определить, что нужно?Этот главный вал вращается со скоростью 80-100 об/мин, а количество веса, которое вращается вместе с ним, еще не взвешено, где-то в районе 5-600 фунтов.
Дейл Нельсон
Лими Сами
Алмаз
#2
Дейл, в 27-м издании MHB довольно много говорится о балансировке, но это область, в которой у меня нет опыта, и я признаю, что математика нужна лучше моей.
Будьте осторожны. Сами.
Джонодер
Алмаз
#3
Если существующий чугун, это около 0,255 фунтов на кубический дюйм. Если вы просто дублируете сталь, это будет около 0,2833 фунта на кубический дюйм.
Джон
Уолт @ SGS Inc.
Нержавеющая сталь
#4
Что произойдет, если вы сделаете «маховик» и сместите центр на ту же величину, что и упомянутое выше смещение.
Возможно, я слишком упростил.
С уважением, Уолт…
PS Еще мысль, сделать взвешенное смещение, регулируемое по центру и от центра….
гбент
Алмаз
#5
Если я правильно понимаю, над чем вы работаете, я бы начал просто с использования существующих противовесов. Гравий на экране является частью того, что уравновешивается, поэтому система не может быть оценена, кроме как в рабочих условиях. Если он слишком сильно вибрирует, вам придется выяснить, перегружен он или нет.
3т3д
Алмаз
#6
Помните, что если противовесы равны весу груза, они компенсируют поперечный дисбаланс, но создают дисбаланс вверх и вниз.
Таким образом, противовесы — это всегда компромисс в отношении того, какое движение вы хотите компенсировать. Вверх/вниз или в сторону/в сторону.
Вот почему в некоторых двигателях используется балансировочный вал.
У них достаточно веса, чтобы компенсировать движение поршня вверх/вниз, что приводит к тряске из стороны в сторону.
Балансировочный вал, вращающийся в противоположном направлении, компенсирует движение из стороны в сторону.
Не так просто, как хотелось бы, простые противовесы НЕ МОГУТ быть «правильными».
сварочный аппарат
Нержавеющая сталь
#7
Спасибо за ответы. У меня нет или у владельца нет противовесов для этого вала, поэтому мне придется перепроектировать аналогичные с другого просеивателя. То, что гравий не может быть компенсирован, заставляет меня думать, что грузы должны примерно компенсировать движение экрана и вибростенда. Это не гарантия успеха, но я видел несколько довольно древних скринеров, и у них нет таких трещин в металле, которые ассоциируются с вибрацией. Итак, пора взвешивать кое-какие весы!
Дейл
ААБ
Запрещено
#8
Дейл,
Можете ли вы опубликовать изображение экрана
и номинальный размер, например, 8 футов х 4 фута и т. д. ?
У меня есть несколько иллюстраций нескольких экранов, которые могут оказаться полезными.
600 фунтов — это слишком много для старта с места.
С уважением, Мельбурн, Австралия,
AAB
Грязь
Алмаз
#9
Вот полу-ВАГ с моей стороны. Я считаю, что вы пытаетесь отменить возвратно-поступательный дисбаланс, а также вращательный дисбаланс. Вы не можете сделать это идеально, но вы можете приблизиться к этому. Я бы взвесил вращающуюся часть массы, которая крепится к шатунной шейке (большой конец стержня), и отдельно взвесил возвратно-поступательную массу (маленький конец стержня и все детали экрана). Сложите вращающийся вес и 50% возвратно-поступательного веса, чтобы получить общую сумму. Создайте груз такого веса, который вы можете прикрепить к шейке удилища, который будет концентричен по отношению к шейке (например, большой разъемный воротник, который вы можете закрепить вокруг цапфы). Прикрепите груз, поставьте коленчатый вал на ролики, как балансировочный станок, или на ровные параллели, чтобы он мог свободно вращаться. Теперь начните накладывать вес на другую сторону коленчатого вала, пока он не уравновесится, прихватками, глиной, суперклеем, болтами, чем угодно.
Я немного предполагаю цифру 50%, эта цифра зависит от оборотов кривошипа, чтобы получить «золотую середину» — быстрее требует более высоких процентов, то, с чем я знаком, требует около 60% при 3000 об/мин и 70% при 6000 об/мин.
Когда у вас будет правильный временный противовес, продублируйте его в стальной пластине и при необходимости отрегулируйте, чтобы кривошип сбалансировался с грузом.
сварочный аппарат
Нержавеющая сталь
#10
AAB Размер экрана составляет 42 дюйма на 84 дюйма, и я считаю, что это типичный гравийный экран, отверстия 1 дюйм и проволока 3/16 дюйма, вероятно, весит 60-70 фунтов. 600 фунтов, вероятно, слишком много, но если вы включите вес 4-дюймового вала в нагрузку, чтобы начать, она должна быть близка к 500 фунтам. Странно то, что я видел, как грохоты работают с одним ремнем серии B! Шкивы рассчитаны на 4 ремня, но я видел, как два из них работают с 1 и даже не визжат при запуске!
Брызговики, звучит как интересная идея! Я могу снять коробку шейкера и установить все это на несколько стальных козлов, закрепить ее и сделать, как вы предлагаете, путем проб и ошибок, чтобы приблизить ее. Владелец сказал мне, что подержанный в неизвестном состоянии будет стоить минимум 1000 долларов, поэтому у меня будет достаточно времени на исследования и разработки, чтобы сделать эту работу!
Дейл
Грязь
Алмаз
#11
Я могу снять коробку встряхивателя и установить все это на несколько стальных козлов и закрепить его, и сделать, как вы предлагаете, методом проб и ошибок, чтобы приблизить его.
Нажмите, чтобы развернуть…
Значит ли это, что вы собираетесь крутить его под напряжением? Я предлагаю статический баланс при 0 об/мин вне машины, только кривошип. Извините, если я не был ясен.
сварочный аппарат
Нержавеющая сталь
#12
Брызговики, наверное, я не ясно выразился. Если дело дойдет до этой стадии, я бы начал с вращения вручную или настолько медленно, насколько я мог бы вращать его механически, а затем увеличивал скорость, насколько позволял баланс. Я по-прежнему думаю, что дублирование грузов c’ будет самым простым решением, но даже в этом случае тестирование с контролируемой частотой вращения все равно будет использоваться.
Дейл
13. Конструкция коленчатого вала (A-6303) — Модернизация двигателя модели A
КОНСТРУКЦИЯ КОЛЕНЧАТОГО ВАЛА (A-6303)
Новый коленчатый вал имеет пять коренных подшипников диаметром 2000 дюймов. Тяга коленчатого вала регулируется задним коренным подшипником. Повсюду используются широкие скругления для смягчения концентраторов напряжения.
Новый коленчатый вал имеет четыре просверленных масляных канала диаметром 0,1875 дюйма от передней, центральной и задней коренных шеек, которые подают масло под давлением к шатунным шейкам.
Расчет противовеса — это инженерное определение размера противовеса. Расчет противовеса отличается от балансировки. Балансировка делает вещи равными. Стандартный коленчатый вал модели А (без противовесов) уравновешен, когда его центр тяжести расположен вдоль центральной оси. Небольшое количество веса добавляется или удаляется, чтобы центр тяжести находился на оси. Балансировка может быть статической (поршни, поршневые пальцы и шатуны) или динамической в случае вращающихся вещей (коленчатый вал, маховик и т. д.).
Коленчатые валы стандартной модели A и модели B 1-го поколения не имеют противовесов. Коленчатый вал модели B 2-го поколения имел встроенные противовесы, эквивалентные примерно 40% современных стандартов двигателей, а двигатели Model B, восстановленные на заводе в конце 30-х годов, имели противовесы, эквивалентные примерно 60% современных стандартов двигателей. В обоих случаях противовесы размещены с одной стороны шатуна, а не с обеих сторон шатуна, как в современном двигателе. Размещение противовеса с одной стороны создает циклические изгибающие нагрузки на коленчатый вал (прогиб и усталость) при каждом обороте. Эти циклические нагрузки увеличиваются пропорционально квадрату числа оборотов в минуту. Каждое удвоение оборотов приводит к увеличению нагрузок (напряжений) и прогибов в четыре раза.
Новый коленчатый вал, созданный в результате этого инженерного исследования, имеет пару идентичных противовесов для каждого цилиндра, которые расположены на одинаковом расстоянии вперед и назад от шатуна, как в современном двигателе. Эти противовесы заботятся о том, что инженеры называют «эффектами первого порядка», поскольку они уменьшают нагрузку на коленчатый вал и его прогиб.
Рис. 4. Противовесы и шатун
На рис. 4 в разобранном виде показаны пара идентичных противовесов слева и шатун справа, которые используются для каждого цилиндра.
Уравнение, используемое для определения веса пары противовесов, показано ниже.
CW x A = (CA x B) + (BE + 0,5 x SE) x C, где:
CW – вес пары противовесов
A – расстояние от центральной оси коленчатого вала до cg противовесов
CA — вес шатуна
B — расстояние от центральной оси коленчатого вала до центра тяжести шатуна
BE — вес большого конца шатуна
. 5 — постоянная величина (хорошо до ~ 7000 об/мин, увеличивается до 0,55 при 18 000 об/мин) расстояние от центральной оси коленчатого вала до центральной линии шатунной шейки (2,125 дюйма), (1/2 от хода 4,25 дюйма)
В картере было достаточно места для 100% противовесов, если они сделаны из одного и того же материала как коленчатый вал (ковкий чугун). Противовесы могли бы стать меньше, если бы кривошип, шатун или поршень были легче. Противовесы также могли бы стать меньше и иметь тот же эффект, если бы они были сделаны из более плотного материала, такого как вольфрам.
Еще одной проблемой являются эффекты вибрации второго порядка. Современные рядные четырехцилиндровые двигатели имеют два уравновешивающих вала с противовесами, вращающимися в противоположных направлениях и с удвоенной скоростью вращения двигателя. Эти уравновешивающие валы компенсируют вибрацию второго порядка, вызванную тем, что два восходящих поршня и два опускающихся поршня не всегда имеют одинаковое противоположное ускорение. Вспомните рассчитанные ранее ускорения шатуна в ВМТ и НМТ (+1936 g и –1081 g). Противовесы уменьшают прогибы и напряжение коленчатого вала, а балансирные валы — нет. Уравновешивающие валы снижают нагрузку на элементы, внешние по отношению к двигателю, и повышают комфорт пассажиров. Поскольку уравновешивающие валы не уменьшают напряжения во внутренних компонентах двигателя и поскольку для них нет физического места в картере модели А, они не рассматривались в данном инженерном исследовании.
Передний конец нового коленчатого вала идентичен переднему концу стандартного коленчатого вала модели А, поэтому все сопрягаемые детали (шпонка, шестерня, маслоотражатель, шкив, храповая гайка) подходят без изменений.
В задней части нового коленчатого вала интерфейс и расположение маховика идентичны стандартной модели A, однако фланец намного толще. Этот более толстый фланец необходим для обеспечения уплотняющей поверхности для пары радиальных манжетных уплотнений, описанных ниже, и дополнительным преимуществом является то, что он укорачивает длину задней коренной шейки, в результате чего коленчатый вал становится более жестким.
На рисунке 5 показан новый коленчатый вал сзади. Крепежные отверстия маховика и установочные штифты не показаны.
Рисунок 5, Коленчатый вал
Вес стандартного коленчатого вала модели А составляет 28 фунтов. Коленчатый вал модели B второй конструкции со встроенными (40%) противовесами весит 47 фунтов, а заводской ремонт модели B конца 30-х годов с запрессованными (60%) противовесами весит 60 фунтов. Коленчатый вал от двигателя Offenhauser диаметром 176 дюймов * 3, который производил 460 л.с. в 1950 весил 67 фунтов. (Уолтон, Оффи, стр. 121). Коленчатый вал новой конструкции со 100% противовесами, изготовленными из того же материала (ковкий чугун), весит 90 фунтов. Если бы противовесы содержали вольфрам (дополнительная стоимость), общий вес коленчатого вала существенно снизился бы.
Компания Phelps. Контрольный список для проектирования веса и шкива
(заполняется для каждого размера створки)
При проектировании системы для нескольких размеров окон выберите окно с наибольшим соотношением ширины и высоты, чтобы проверить выполнимость системы.
| а) | Общая высота открывания створки | ________дюймов | |
| б) | Размеры одинарной створки: | ширина створки | ________дюймов |
| в) | высота створки | ________дюймов | |
| г) | толщина створки | ________дюймов | |
| д) | Доступное вертикальное пространство в грузовом кармане рассчитывается путем измерения расстояния от пятки бокового косяка до низа корпуса шкива створки менее 2 дюймов для крепления противовеса | ________дюймов | |
| е) | Требование вертикального перемещения (a — c) | ________дюймов | |
| г) | Максимальная длина противовеса (e — f) | ________дюймов | |
| ч) | Вес неостекленной створки | ________фунтов | |
| и) | Размер стекла (общая площадь) | ________кв. дюймов | |
| к) | Вес остекления на квадратный фут | ________фунтов | |
| л) | Общий вес створки (i x j) + h | ________фунтов | |
| е) | Масса одного противовеса (к/2) | ________фунтов | |
Рассчитайте длину необходимого противовеса створки* и сравните это значение с максимальной длиной противовеса, рассчитанной на шаге g выше. От этого будет зависеть целесообразность предлагаемого проекта.
* Размеры противовеса створки см. в документации производителя.
Примечание : В этих двух примерах показаны расчеты для оконной системы грузов и шкивов. В первом примере показано окно с одинарным остеклением, во втором – с двойным остеклением.
Пример #1
1 3/4″ сосновая створка, одинарное остекление
- Двойной общий проем створки: 3′-0″ x 5′-10″
- Высота створки: 3′-0″
- Вертикальный ход створки: 34 дюйма
- Размер стекла: 2′-8″ x 2′-8″ (стекло двойной прочности — 1,55 фунта/кв. фут)
- Максимальная длина противовеса: 28 дюймов
- Расчетный вес остекленной створки: 22,22 фунта.
- Требуются противовесы: 2 шт. — 11 фунтов.
- Длина противовеса (1 3/4 дюйма, квадратный чугун, штабелируемый): 16 3 / 8 »
- Максимальный ход указанного противовеса: 42 дюйма
- Толщина косяка: 7 / 8 »
- Требуемое расстояние для забрасывания груза в карман: 1 7 / 8 »
(толщина косяка + 1/2 диаметра груза + зазор 1/8 дюйма) - Рекомендуемый размер шкива: 2 1 / 4 »
Пример #2
1 3/4″ створка из сосны, двойное остекление
- Двойной общий проем створки: 3′-0″ x 5′-10″
- Высота створки: 3′-0″
- Вертикальный ход створки: 34 дюйма
- Размер стекла: 2 фута-8 дюймов x 2 фута-8 дюймов (два слоя стекла двойной прочности; 2 x 1,55 фунта/кв.
