

Содержание
Работа электродвигателей на общий вал
Привод некоторых механизмов осуществляется посредством двух электродвигателей, валы которых механически связаны между собой. Соединяться валы могут либо абсолютно жестко, посредством муфты, либо через зубчатые передачи, но с передаточным отношением между валами электрических машин, равным единице. Как правило, электродвигатели выбирают одного типа, мощности и с равными скоростями вращения.
Такие системы электропривода очень часто используют в тех случаях, когда необходимо уменьшить маховый момент системы, когда габариты системы не позволяют установить один электродвигатель на полную мощность, когда для получения пониженных скоростей или улучшенных тормозных характеристик электропривода целесообразней использовать специальные механические характеристики двух электродвигателей, один из которых работает в двигательном режиме, а второй в тормозном.
При работе электрических машин на общий вал возникает вопрос о равном распределении нагрузок между ними. В случае использования электродвигателей одинаковой мощности равное распределение нагрузок между ними возможно только в случае строгой идентичности их механических характеристик. Рассмотрим это на классическом примере электродвигателей постоянного тока независимого возбуждения. Представим, что электрические машины питаются от одной сети, то есть напряжение, подводимое к их зажимам, будет одинаково. Тогда получим следующее выражение:
В случае использования электродвигателей одинаковой мощности равное распределение нагрузок между ними возможно только в случае строгой идентичности их механических характеристик. Рассмотрим это на классическом примере электродвигателей постоянного тока независимого возбуждения. Представим, что электрические машины питаются от одной сети, то есть напряжение, подводимое к их зажимам, будет одинаково. Тогда получим следующее выражение:
Так как электрические машины по своим номинальным данным предполагаются совершенно идентичными, то число полюсов в них одинаковое, а обмотки якорей имеют одно и то же число витков и параллельных ветвей и, следовательно, kE1 = kE2.
Для того, чтобы всегда соблюдалось равенство нагрузок (I1 = I2), электродвигатели должны иметь одинаковые сопротивления в цепи якорей (rя1 = rя2) и одинаковые магнитные потоки. Говоря другими словами – электрические машины должны иметь равные скорости идеального холостого хода и одинаковые углы наклона механических характеристик, то есть механические характеристики должны быть абсолютно идентичными. Из рисунка ниже следует, что как неравенство магнитных потоков, так и неравенство сопротивлений якорных цепей приводит к неравномерному распределению нагрузок:
Из рисунка ниже следует, что как неравенство магнитных потоков, так и неравенство сопротивлений якорных цепей приводит к неравномерному распределению нагрузок:
Особенно нежелательно иметь разные скорости идеального холостого хода. В таком случае одна из машин может работать даже в тормозном режиме, создавая дополнительный момент нагрузки для второй машины, как это показано на рисунке ниже:
Необходимо иметь в виду, что даже у электродвигателей одинаковой мощности и одного и того же конструктивного исполнения механические характеристики могут отличаться вследствие неравенства воздушных зазоров, различного сопротивления цепей якоря из-за неодинаковой длины соединительных проводов и так далее.
Углы наклона характеристик могут быть выравнены путем ведения добавочного сопротивления в цепь якоря электрической машины, имеющей меньшую крутизну характеристики. Неравенство скоростей идеального холостого хода может быть устранено введением добавочного сопротивления в цепь возбуждения. Однако при этом одновременно изменяется и наклон механической характеристики. Иногда для обеспечения более близких друг к другу величин магнитных потоков обмотки возбуждения обеих машин соединяются последовательно. Обмотки возбуждения при этом должны быть рассчитаны на напряжение, равное половине напряжения питающей сети.
Однако при этом одновременно изменяется и наклон механической характеристики. Иногда для обеспечения более близких друг к другу величин магнитных потоков обмотки возбуждения обеих машин соединяются последовательно. Обмотки возбуждения при этом должны быть рассчитаны на напряжение, равное половине напряжения питающей сети.
Последовательное соединение якорей машин независимого возбуждения при равных магнитных потоках, естественно, приводит к полному выравниванию моментов. Так как в этом случае якоря всегда обтекаются одним и тем же током, а скорости вращения вследствие жесткой связи валов строго одинаковы, то электродвигатели вынужденно работают на одной общей для них механической характеристике. Эта характеристика должна лежать между естественными характеристиками обоих электродвигателей. Смещение механических характеристик происходит за счет перераспределения напряжений на щетках электродвигателей.
В ряде случаев для обеспечения выравнивания нагрузок используют электрические машины, имеющие кроме обмотки независимого возбуждения, по две одинаковые последовательные обмотки. В цепь каждого электродвигателя включается две последовательные обмотки: встречно-включенная данной машины и согласно-включенная другой машины. При увеличении нагрузки одной из электрических машин ее ток будет усиливать собственное магнитное поле, вызывая увеличение ЭДС, и ослаблять магнитный поток другой электрической машины, уменьшая ее ЭДС и увеличивая нагрузку.
В цепь каждого электродвигателя включается две последовательные обмотки: встречно-включенная данной машины и согласно-включенная другой машины. При увеличении нагрузки одной из электрических машин ее ток будет усиливать собственное магнитное поле, вызывая увеличение ЭДС, и ослаблять магнитный поток другой электрической машины, уменьшая ее ЭДС и увеличивая нагрузку.
Электродвигатели последовательного возбуждения имеют «мягкие» механические характеристики, и условия распределения нагрузок при работе на один вал в этом случае более благоприятны (рисунок ниже):
Работа асинхронных электродвигателей протекает примерно в тех же условиях, как и электрических машин постоянного тока независимого возбуждения. Однако в этом случае возможно только неравенство углов наклона механических характеристик. Скорости идеального холостого хода, определяемые скоростью вращения магнитного поля, при одинаковом числе полюсов обмоток статоров и при питании от общей сети строго одинаковы.
При использовании электродвигателей различной мощности необходимо обеспечить распределение моментов между машинами пропорционально номинальной мощности. Для этого у электрических машин меньшей мощности крутизна характеристики должна быть больше.
Для этого у электрических машин меньшей мощности крутизна характеристики должна быть больше.
Распределение нагрузок в неустановившемся режиме зависит еще от ряда дополнительных условий: соотношения значений индуктивностей цепей электродвигателей, одновременности работы аппаратуры управления – реле и контакторов. Для исключения влияния нечеткости работы аппаратуры управления отдельных электрических машин часто переключения в цепях всех электродвигателей осуществляется одновременно посредством общих для всех электрических машин многокотнактных аппаратов.
Как синхронизировать работу двух двигателей
Содержание
- Методы синхронизации скорости вращения двух частотно-регулируемых приводов
- Синхронизация без использования датчиков обратной связи по скорости
- Синхронизация по импульсным сигналам с датчиками обратной связи по скорости
- Синхронизация сервоприводов
- Как синхронизировать работу двух двигателей
- Главное меню
- Судовые двигатели
- Форум АСУТП
- Как синхронизировать двигатели?
- Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Re: Как синхронизировать двигатели?
- Методы синхронизации скорости нескольких частотно-регулируемых приводов
- 1.
 Синхронизация без использования датчиков обратной связи по скорости
Синхронизация без использования датчиков обратной связи по скорости - 2. Синхронизация по импульсным сигналам с датчиками обратной связи по скорости
- 3. Синхронизация сервоприводов
- Как синхронизировать работу двух двигателей
- Видео
Методы синхронизации скорости вращения двух частотно-регулируемых приводов
Синхронизация без использования датчиков обратной связи по скорости
Данный метод наиболее прост в реализации, не требует дополнительных устройств (интерфейсных плат, датчиков обратной связи и др.). При использовании преобразователей частоты с хорошим бессенсорным векторным управлением может быть обеспечена точность синхронизации скоростей в пределах ± 1% в диапазоне регулирования 1:100 с динамическим откликом примерно 5Гц. Данный метод синхронизации скорости вращения может применяться, например, в частотно-каскадных схемах управления группой насосов.
Синхронизация по аналоговым входам-выходам:
Возможно настроить смещение скоростей, отмасштабировав аналоговый вход ПЧ2 или аналоговый выход ПЧ1. Данный метод синхронизации скоростей вращения можно реализовать практически на любых моделях частотных преобразователей с хорошим аналоговым выходом: разрядность ЦАП должна быть не менее 10.
Данный метод синхронизации скоростей вращения можно реализовать практически на любых моделях частотных преобразователей с хорошим аналоговым выходом: разрядность ЦАП должна быть не менее 10.
В простейшем варианте можно просто давать параллельное задание одновременно на оба ЧРП:
Синхронизация по последовательному интерфейсу:
При этом методе синхронизации точность задания скорости ведомого ПЧ2 не зависит от разрядности АЦП и ЦАП аналоговых входов-выходов частотных преобразователей.
Не все частотные преобразователи, в том числе имеющие коммуникационные порты, могут работать в режиме синхронизации по последовательному интерфейсу. В режиме «Master/Slave” могут работать, например, частотные преобразователи Optidrive P2, Optidrive HVAC, Optidrive Plus 3GV и Optidrive VTC по RS-485, а также Delta VFD-С2000 по CANOpen.
Данный метод позволяет обеспечить на порядок более высокую точность синхронизации скоростей (± 0,1%) в диапазоне регулирования 1:1000 с динамическим откликом до 40Гц. В данном режиме могут работать, например, преобразователи частоты Delta VFD-С2000 с платами расширения PG и инкрементальными энкодерами с разрешением от 1000 имп/об.
В данном режиме могут работать, например, преобразователи частоты Delta VFD-С2000 с платами расширения PG и инкрементальными энкодерами с разрешением от 1000 имп/об.
Данный метод синхронизации скорости вращения нескольких частотно-регулируемых приводов востребован в полиграфическом оборудовании, прокатных станах, в упаковочных и фасовочных линиях, в оборудовании по производству пленки и т.д.
Ведущий и ведомый преобразователи работают с обратной связью по скорости:
Если ведущий привод нерегулируемый или с простым не векторным преобразователем частоты или без возможности работать с обратной связью:
Синхронизация сервоприводов
Сервоприводы позволяют реализовать синхронизацию не только скоростей, но и углового положения валов относительно друг друга с чрезвычайно высокой точностью, например, до 0,001° в сервоприводе Delta ASDA-A2.
Например, в портальном кране обе оси привода портала должны обеспечить перемещение с постоянной скоростью, иначе возможны механические повреждения приводов. Встроенные в сервопривод ASDA-A2 арифметические функции синхронизации портальных приводов дают возможность осуществить синхронность движения по импульсным сигналам от контроллера системы, управляющего одной координатой. Двухосевое управление будет осуществляться самостоятельно, осуществляя синхронизацию. При недопустимом рассогласовании движения по положению появится сигнал аварии и система остановится.
Встроенные в сервопривод ASDA-A2 арифметические функции синхронизации портальных приводов дают возможность осуществить синхронность движения по импульсным сигналам от контроллера системы, управляющего одной координатой. Двухосевое управление будет осуществляться самостоятельно, осуществляя синхронизацию. При недопустимом рассогласовании движения по положению появится сигнал аварии и система остановится.
(1) Сигналы управления между сервоприводом оси 1 и управляющим контроллером системы
(2) Сигналы управления между сервоприводом оси 2 и управляющим контроллером системы
(3) Импульсные команды позиционирования от контроллера системы к сервоприводам 1 и 2 оси
(4) Импульсная команда рассогласования по положению, посылаемая сервоприводом 1 оси сервоприводу 2 оси
(5) Импульсная команда рассогласования по положению, посылаемая сервоприводом 2 оси сервоприводу 1 оси
Системы типа «электрический вал» на базе сервоприводов позволяют упростить механическую конструкцию системы, избавив её от системы передаточных шестерней, цепей, ремней и т. д., в различных типах роботизированного оборудования, сварочных, сборочных и обрабатывающих автоматических линиях.
д., в различных типах роботизированного оборудования, сварочных, сборочных и обрабатывающих автоматических линиях.
При подготовке публикации использованы информационные материалы ООО «Интехникс».
Источник
Как синхронизировать работу двух двигателей
Главное меню
Судовые двигатели
При многодвигательном электроприводе иногда требуется, чтобы несколько электродвигателей, удаленных друг от друга на значительное расстояние, вращались с одинаковой скоростью. Такие случаи имеют место в электроприводах экскалаторов, прокатных станов, механизмов передвижения перегрузочных мостов, некоторых типов грейферных лебедок и др. Вращение электродвигателей, имеющих различную нагрузку, с одинаковой скоростью называется согласованным. Согласованное вращение может быть осуществлено путем механического соединения их валов. Однако при значительном удалении машин друг от друга, а также при неудобном их расположении механическое соединение зачастую оказывается затруднительным, так как при этом необходимо применять валы слишком большой длины и диаметра, большое количество подшипников и других механических приспособлений, что увеличивает вес, габариты, стоимость привода и затрудняет его эксплуатацию.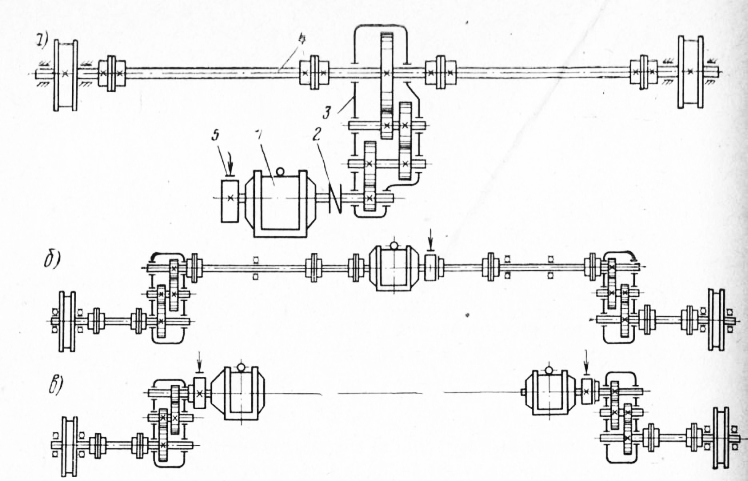
Для обеспечения согласованного вращения электродвигателей при неодинаковых нагрузках разработан ряд электрических схем, позволяющих получить синхронное вращение электродвигателей без использования механических приспособлений. Такие схемы называются системами синхронного вращения. В них используются асинхронные машины, обеспечивающие наиболее надежную работу привода. Различают системы синхронного вращения со вспомогательными синхронизирующими машинами и без вспомогательных машин. В состав любой системы синхронного вращения входят главные электродвигатели, обеспечивающие привод механизмов. В системах первой группы с валами главных электродвигателей соединяются вспомогательные асинхронные или синхронные машины, с помощью которых и осуществляется согласованное вращение главных электродвигателей.
В системах без вспомогательных машин согласованное вращение осуществляется непосредственно за счет главных электродвигателей, соединенных определенным образом между собой.
Нужно иметь в виду, что в системах со вспомогательными машинами возможно применение главных электродвигателей любого типа. Однако системы синхронного вращения с главными электродвигателями постоянного тока применяются сравнительно редко и здесь не рассматриваются. То же самое относится и к системам синхронного вращения со вспомогательными синхронными машинами, которые не обеспечивают согласованного вращения главных электродвигателей в период пуска и торможения и поэтому применяются очень редко.
Однако системы синхронного вращения с главными электродвигателями постоянного тока применяются сравнительно редко и здесь не рассматриваются. То же самое относится и к системам синхронного вращения со вспомогательными синхронными машинами, которые не обеспечивают согласованного вращения главных электродвигателей в период пуска и торможения и поэтому применяются очень редко.
Если главные электродвигатели Д 1 и Д 2 однотипны и имеют одинаковую нагрузку, то вращаются они с одинаковыми скоростями. Вспомогательные машины А 1 и А 2 тоже имеют при этом одинаковую скорость и никаких вращающих моментов не создают. Это объясняется тем, что обмотки роторов вспомогательных машин включены навстречу друг другу. Вследствие этого э. д. е., наводимые в каждой фазе ротора одной вспомогательной машины, уравновешиваются э. д. е., наводимыми в фазах ротора другой машины. Поэтому в обмотках роторов вспомогательных машин токи отсутствуют и никаких вращающих моментов машины не создают, т. е. главные электродвигатели, имея одинаковые механические характеристики, будут вращаться синхронно и без участия вспомогательных машин.
е. главные электродвигатели, имея одинаковые механические характеристики, будут вращаться синхронно и без участия вспомогательных машин.
В случае увеличения нагрузки, например, на электродвигатель Д 1 скорость последнего начнет снижаться и между роторами вспомогательных машин А 1 и А 2 возникнет угол рассогласования. В результате э. д. с. их роторных обмоток уравновешиваться не будут и в них появятся уравнительные токи, что приведет к созданию дополнительных вращающих моментов, приложенных к валам I и II.
Схема «электрического вала» обеспечивает синхронное вращение главных электродвигателей не только при значительной разнице моментов статического сопротивления в установившихся электродвигательном и тормозных режимах работы, но и при переходных процессах (во время пусков и реверсов). Однако ее главным недостатком является большое количество электрических машин, что усложняет привод и увеличивает его стоимость.
При небольшой разнице в нагрузках согласованное вращение асинхронных электродвигателей может быть достигнуто без использования вспомогательных синхронизирующих машин. Для этого главные электродвигатели Д 1 и Д 2 необходимо включать по схеме, показанной на рис. 57. Как и в предыдущих схемах, статорные обмотки электродвигателей питаются от общей сети трехфазного тока, а роторы включены навстречу друг другу и присоединены к реостату (для увеличения скольжения при различных нагрузках электродвигателей). Если электродвигатели Д 1 и Д 2 нагружены одинаково и вращаются строго синхронно, э. д. с., наводимые в роторных обмотках, равны по величине и направлены навстречу друг другу.
Если из-за неравенства нагрузки один из роторов отстанет от другого, в проводах, соединяющих роторы, появится уравнительный ток, который создаст для более нагруженной машины дополнительный двигательный, а для менее нагруженной машины дополнительный тормозной момент. Последнее приведет к тому, что нагрузки на электродвигатели станут равными и они будут вращаться синхронно.
Последнее приведет к тому, что нагрузки на электродвигатели станут равными и они будут вращаться синхронно.
Система синхронного вращения без вспомогательных машин отличается простотой, обеспечивает синхронное вращение главных электродвигателей в установившемся двигательном режиме и тормозном режиме противовключения. Однако величина синхронизирующего момента, как указывалось, зависит от величины э. д. с. ротора, а последняя, в свою очередь, от скольжения, при котором работает машина. Поэтому при малых величинах скольжения синхронизирующий момент, создаваемый электродвигателями, будет мал, и электродвигатели, будучи выведены из состояния синхронной работы, вернуться в нее не смогут, так как даже при сравнительно небольшой разнице в моментах статического сопротивления (10—15%) скольжение должно быть не менее 20—25%. Поэтому чтобы электродвигатели вращались синхронно, необходимо искусственно увеличивать их скольжение введением дополнительных сопротивлений в роторные цепи, что приводит к увеличению потерь мощности.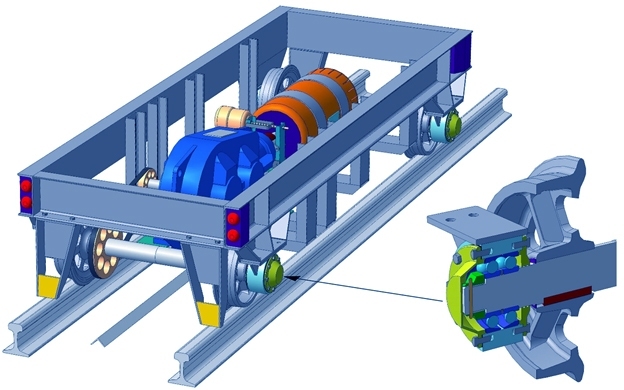
Рассматриваемая система имеет и недостатки. При отключении электродвигателей от сети их синхронное вращение нарушается. Это приводит к тому, что при последующем пуске могут возникнуть недопустимо большие пусковые токи и моменты из-за возможного значительного угла рассогласования роторов. Для предотвращения этого схему приходится усложнять и она практически теряет все свои преимущества. Поэтому эта схема применяется сравнительно редко, хотя стоимость установки меньше предыдущей.
Источник
Форум АСУТП
Клуб специалистов в области промышленной автоматизации
Как синхронизировать двигатели?
Как синхронизировать двигатели?
Сообщение kyrill kosachev » 16 сен 2014, 20:33
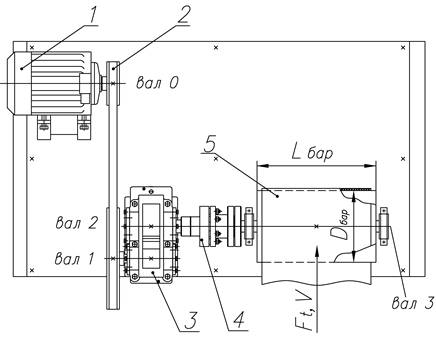
Нужно будет вращать многоопорную трубу двумя двигателями в двух местах. Нужно синхронизировать двигатели так, чтобы минимально напрягать трубу на скручивание избегая при этом конкуренции, при которой один из двигателей толкает, а второй подтормаживает.
Иначе придет повышенный усталостный износ и преждевременное разрушение трубы.
Фактически 2 двигателя через механические передачи «почти сидят на одном валу» в виде неидеальной (не 100% жесткой) трубы.
Что выбрать критерием синхронности, какие могут быть общие соображения?
Удастся обойтись без измерения моментов на валах двигателей?
Думал про потребляемые токи или потребляемые мощности, но они могут отличаться на разных экземплярах двигателей и КПД может зависеть от температуры.
Re: Как синхронизировать двигатели?
Сообщение Михайло » 16 сен 2014, 20:57
Теоретически можете использовать два одинаковых асинхронных двигателя. Можно включать пускателями (прямой пуск) или одним общим преобразователем частоты в скалярном режиме U/f. При таком методе двигатели однозначно не будут работать в противоположных режимах (один в двигательном, другой в генераторном). У этих двигателей при работе от общего источника напряжения такое невозможно. Этот метод безусловно прост в реализации, но напряжения в трубе не убрать 100%. Величина напряженности будет зависеть от разницы механических характеристик двигателей. На практике можно считать, что в трубе возникнет напряжение, соответствующее 0-20% номинального момента двигателя.
Этот метод безусловно прост в реализации, но напряжения в трубе не убрать 100%. Величина напряженности будет зависеть от разницы механических характеристик двигателей. На практике можно считать, что в трубе возникнет напряжение, соответствующее 0-20% номинального момента двигателя.
Вы вообще про преобразователи частоты, сервоприводы слышали?
Кстати, чему равно Mmin?
Других дополнительных критериев (ограничений) в Вашей задаче нет.
Re: Как синхронизировать двигатели?
Сообщение kyrill kosachev » 16 сен 2014, 21:15
Re: Как синхронизировать двигатели?
Сообщение Бондарев Михаил » 17 сен 2014, 00:04
Re: Как синхронизировать двигатели?
Сообщение Михайло » 17 сен 2014, 03:46
Тут правда вопрос возникает:
Re: Как синхронизировать двигатели?
Сообщение kyrill kosachev » 17 сен 2014, 05:29
Re: Как синхронизировать двигатели?
Сообщение kyrill kosachev » 17 сен 2014, 05:35
Re: Как синхронизировать двигатели?
Сообщение Михайло » 17 сен 2014, 16:12
Именно, не взирая. По началу этот привод попытается взять на себя все 100% нагрузки, потом быстро «поймет», что напрягаться не надо (ведь второй привод повторяет за ним) и в установившемся режиме два привода разделят нагрузку пополам.
По началу этот привод попытается взять на себя все 100% нагрузки, потом быстро «поймет», что напрягаться не надо (ведь второй привод повторяет за ним) и в установившемся режиме два привода разделят нагрузку пополам.
Первый привод задаст скорость вращения, второй привод будет следить, чтобы нагрузка распределилась пополам.
Если скорость не будет снижаться ниже плинтуса, то датчики скорости (энкодеры) не нужны будут, а равномерность распределения нагрузки будет достаточно высокая.
Если обжигаемые изделия скопятся в одной части трубы, то возникнет напряжение в трубе, т.к. труба вынуждена будет передать крутящий момент от удаленного двигателя в противоположную половину трубы, где наблюдается излишек изделий. То есть в данном случае система управления с равномерным распределением нагрузки на двигатели не очень пригодна. Нужна система, в которой будет присутствовать датчик напряженности трубы, или система, которая будет знать распределение изделий по длине трубы и которая будет распределять нагрузку между двигателями в соответствии с распределением изделий. В обоих случаях должен получиться следующий результат: там, где излишек изделий, там двигатель должен напрягаться больше; там, где мало изделий, двигатель должен немного ослабить тягу.
В обоих случаях должен получиться следующий результат: там, где излишек изделий, там двигатель должен напрягаться больше; там, где мало изделий, двигатель должен немного ослабить тягу.
Короче, фантастическая система управления получилась 🙂 Лучше следить, чтобы изделия были равномерно распределены по длине трубы и применить систему с равномерным распределением нагрузки.
Re: Как синхронизировать двигатели?
Сообщение UNTK_RAA » 18 сен 2014, 11:53
Re: Как синхронизировать двигатели?
Сообщение Михайло » 18 сен 2014, 15:23
Re: Как синхронизировать двигатели?
Сообщение Jackson » 22 сен 2014, 16:37
Re: Как синхронизировать двигатели?
Сообщение Jackson » 22 сен 2014, 16:40
Это не будет работать.
Re: Как синхронизировать двигатели?
Сообщение Михайло » 22 сен 2014, 18:18
TEB писал(а): Это не будет работать.
Re: Как синхронизировать двигатели?
Сообщение VADR » 22 сен 2014, 18:37
Re: Как синхронизировать двигатели?
Сообщение Никита » 22 сен 2014, 20:37
Re: Как синхронизировать двигатели?
Сообщение Jackson » 23 сен 2014, 08:24
Автор же сам поставил задачу: избежать скручивания. А как еще можно проконтролировать деформацию если не измерить?
А как еще можно проконтролировать деформацию если не измерить?
У меня была в самом начале мысль тензодатчики на вал поставить, но непонятно как передать сигнал ибо вал-то вращается.
Источник
Методы синхронизации скорости нескольких частотно-регулируемых приводов
Задачи синхронизации скоростей валов нескольких электродвигателей, механически не связанных между собой, приходится решать в различных промышленных применениях. Зачастую можно обойтись без использования ПЛК и специализированных блоков синхронизации, только возможностями современных преобразователей частоты. Ниже предлагается несколько простых способов реализации данной задачи.
1. Синхронизация без использования датчиков обратной связи по скорости
Данный метод наиболее прост в реализации, не требует дополнительных устройств (интерфейсных плат, датчиков обратной связи и др.). При использовании преобразователей частоты с хорошим бессенсорным векторным управлением может быть обеспечена точность синхронизации скоростей в пределах +/- 1% в диапазоне регулирования 1:100 с динамическим откликом примерно 5Гц. Он может применяться, например, в частотно-каскадных схемах управления группой насосов.
Он может применяться, например, в частотно-каскадных схемах управления группой насосов.
Синхронизация по аналоговым входам-выходам:
Возможно настроить смещение скоростей, отмасштабировав аналоговый вход ПЧ2 или аналоговый выход ПЧ1. Можно реализовать практически на любых моделях частотников с хорошим аналоговым выходом (разрядность ЦАП не меньше 10).
В простейшем варианте можно просто давать параллельное задание:
Синхронизация по последовательному интерфейсу:
Здесь точность задания скорости ведомого ПЧ2 не зависит от разрядности аналоговых входов-выходов.
Не все частотные преобразователи, имеющие коммуникационные порты, предназначены для такого режима. В номенклатуре ИНТЕХНИКС в режиме “Master/Slave” могут работать Optidrive P2, Optidrive HVAC, Optidrive Plus 3GV и Optidrive VTC по RS-485, а также Delta VFD-С2000 по CANOpen.
2. Синхронизация по импульсным сигналам с датчиками обратной связи по скорости
Данный метод позволяет обеспечить на порядок более высокую точность синхронизации скоростей (+/- 0. 1%) в диапазоне регулирования 1:1000 с динамическим откликом до 40Гц. В номенклатуре ИНТЕХНИКС в данном режиме могут работать преобразователи частоты Delta VFD-С2000 с платами расширения PG и инкрементальными энкодерами с разрешением от 1000 имп/об.
1%) в диапазоне регулирования 1:1000 с динамическим откликом до 40Гц. В номенклатуре ИНТЕХНИКС в данном режиме могут работать преобразователи частоты Delta VFD-С2000 с платами расширения PG и инкрементальными энкодерами с разрешением от 1000 имп/об.
Метод востребован в полиграфическом оборудовании; в различных типах намотчиков, прокатных станов; в упаковочных и фасовочных линиях; в оборудовании по производству пленки и т.д.
Вариант 1. Оба преобразователя (ведущий и ведомый) работают с обратной связью по скорости:
Вариант 2. Используется когда ведущий привод нерегулируемый или с простым не векторным преобразователем частоты или без возможности работать с обратной связью:
3. Синхронизация сервоприводов
Сервоприводы позволяют реализовать синхронизацию не только скоростей, но и углового положения валов относительно друг друга с чрезвычайно высокой точностью (до 0.001 градуса в сервоприводе Delta ASDA-A2).
Например, в портальном кране обе оси привода портала должны обеспечить перемещение с постоянной скоростью, иначе возможны механические повреждения приводов. Встроенные в сервопривод ASDA-A2 арифметические функции синхронизации портальных приводов дают возможность осуществить синхронность движения по импульсным сигналам от контроллера системы, управляющего одной координатой. Двухосевое управление будет осуществляться самостоятельно, осуществляя синхронизацию. При недопустимом рассогласовании движения по положению появится сигнал аварии и система остановится.
Встроенные в сервопривод ASDA-A2 арифметические функции синхронизации портальных приводов дают возможность осуществить синхронность движения по импульсным сигналам от контроллера системы, управляющего одной координатой. Двухосевое управление будет осуществляться самостоятельно, осуществляя синхронизацию. При недопустимом рассогласовании движения по положению появится сигнал аварии и система остановится.
(1) Сигналы управления между сервоприводом оси 1 и управляющим контроллером системы
(2) Сигналы управления между сервоприводом оси 2 и управляющим контроллером системы
(3) Импульсные команды позиционирования от контроллера системы к сервоприводам 1 и 2 оси
(4) Импульсная команда рассогласования по положению, посылаемая сервоприводом 1 оси сервоприводу 2 оси
(5) Импульсная команда рассогласования по положению, посылаемая сервоприводом 2 оси сервоприводу 1 оси
Системы типа «электрический вал» на базе сервоприводов позволяют упростить механическую конструкцию системы, избавив её от системы передаточных шестерней, цепей, ремней и т. д., в различных типах роботизированного оборудования, сварочных, сборочных и обрабатывающих автоматических линиях.
д., в различных типах роботизированного оборудования, сварочных, сборочных и обрабатывающих автоматических линиях.
Источник
Как синхронизировать работу двух двигателей
Схема синхронного вращения при двух асинхронных двигателях с общим реостатом. Эта схема представлена на рис. 36; она состоит из двух асинхронных электродвигателей, статорные обмотки которых подсоединены к общей сети, а обмотки роторов присоединены параллельно к сопротивлению Ra. Необходимую устойчивость работы можно получить только при больших нагрузочных моментах, т.е. при больших величинах скольжения (что приводит к значительным потерям энергии в реостате), и при сравнительно небольшой разнице между нагрузочными моментами. Наличие сопротивления постоянно включенного во вторичную цепь, не позволяет рационально использовать двигатели, так как скорость вращения понижается и величина к. п. д. установки уменьшается. Постоянная схема может работать только при одинаковых параметрах обоих двигателей.
Рис.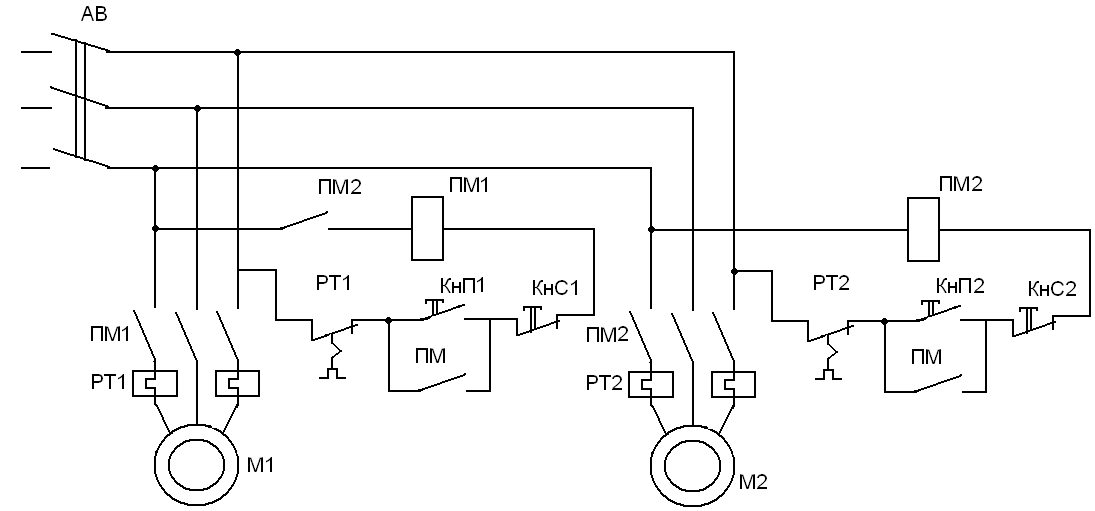 36. Схема синхронного вращения двух асинхронных двигателей с общим реостатом
36. Схема синхронного вращения двух асинхронных двигателей с общим реостатом
Рекламные предложения на основе ваших интересов:
Рис. 37. Механические характеристики совместной работы двух асинхронных двигателей на общий вал
Совместная работа электродвигателей на общий вал с жесткой механической связью между двигателями.
В строительной практике иногда прибегают к устройству электропривода с установкой двух двигателей на одном общем валу (мощные экскаваторы, крупные виброплощадки и др.).
Механическая характеристика такого привода представляет собой сумму характеристик отдельных двигателей.
В большинстве случаев асинхронные двигатели переменного тока одинаковой номинальной мощности имеют различные механические характеристики. На рис. 37 приведены механические характеристики двух двигателей 1 и 2 и общая характеристика привода 3. При каком-либо нагрузочном моменте, например Мл, привод будет вращаться со скоростью щ об/мин. Проведя горизонталь через точку А, найдем моменты М\ и Мг, развиваемые при этом двигателями. Как видно, больший момент нагрузки будет иметь двигатель с более жесткой механической характеристикой, что может вызвать его перегрев. Поэтому при установке двигателей, одинаковых по мощности, но с различными механическими характеристиками, необходимо во вторичную цепь двигателя с более жесткой характеристикой включать активное сопротивление соответствующей величины. Таким путем можно добиться того, что двигатели будут развивать одинаковые моменты в значительном диапазоне нагрузки.
Как видно, больший момент нагрузки будет иметь двигатель с более жесткой механической характеристикой, что может вызвать его перегрев. Поэтому при установке двигателей, одинаковых по мощности, но с различными механическими характеристиками, необходимо во вторичную цепь двигателя с более жесткой характеристикой включать активное сопротивление соответствующей величины. Таким путем можно добиться того, что двигатели будут развивать одинаковые моменты в значительном диапазоне нагрузки.
Если для совместной работы устанавливаются электродвигатели различной номинальной мощности, то следует тщательно подобрать соответствующей величины добавочное сопротивление в цепи ротора одного из них.
Схема синхронного вращения с асинхронными вспомогательными машинами. Эта система включает два или несколько элементов, каждый из которых в свою очередь состоит из главного или рабочего двигателя и жестко связанной с ним вспомогательной машины. Отдельные элементы системы не имеют механической связи между собой. Наиболее простой является система из двух элементов. Каждый элемент состоит из главного приводного двигателя, связанного с валом производственного механизма, и вспомогательной или синхронизирующей электрической машины.
Наиболее простой является система из двух элементов. Каждый элемент состоит из главного приводного двигателя, связанного с валом производственного механизма, и вспомогательной или синхронизирующей электрической машины.
Вспомогательные или синхронизирующие машины служат для синхронизации хода валов двух производственных механизмов. Данная система синхронного вращения двигателей является устойчивой при различных нагрузках на валы производственных механизмов. Недостаток ее — необходимость иметь дополнительные машины, которые удорожают установку и усложняют ее эксплуатацию.
Источник
Видео
О подключении нескольких двигателей к одному преобразователю частоты
Как синхронизировать работу двигателя мотоцикла Урал
Синхронизация двух ПЧ С2000 по положению вала двигателя
Плата синхронизации, выравнивание портала или синхронизация двигателей.
Синхронизация ШД NEMA 17,🛠 Самосбор CoreXY 3D Printer Часть 5 DIY🛠
Увеличение срока службы двигателей
Советы моделистам. Как подключить два мотора к одному приемнику | Хобби Остров.рф
Как подключить два мотора к одному приемнику | Хобби Остров.рф
Синхронизация генераторов
два мотора от одного контроллера
Синхронизация скорости/положения асинхронных двигателей с помощью ПЧ Danfoss FC302 + MCO305
Подключение к одному преобразователю частоты двух двигателей
Главная Применение Подключение к одному преобразователю частоты двух двигателей
444
Мощность и электрический ток частотного преобразователя напряжение при подсоединении к нему в одно время двух двигателей выбирают с превышением на 20% от всей мощности электромоторов. Для расчета протяженности электрического кабеля надо сложить размеры всех кабелей двух двигателей. Снизить общую длину необходимо, если подключить два электродвигателя конкретно к контактам частотного преобразователя. При двух электродвигателях целесообразно поставить дроссель для мотора, несмотря на то, что общая протяженность этих кабелей не выше самой большой длины.
При двух электродвигателях целесообразно поставить дроссель для мотора, несмотря на то, что общая протяженность этих кабелей не выше самой большой длины.
Множество преобразователей частоты не терпит соединения и отключения электродвигателей тока контакторами с электроприводом в процессе работы, а только включив СТОП команду на приводе.
Два одинаковых мотора на один частотник возможно?
Теоретически такое подключение не рекомендуется, особенно для векторного преобразователя частоты. Можно подключать на скалярный, если электродвигатели работают совместно на одном валу, и можно фазировать их плавно через муфту тока скольжения. Возможно подстраивать расположение роторов между собой муфтой. Затем муфту надо закрепить. На небольшой нагрузке подстроить токи между двигателями с помощью токовых клещей.
Существуют определенные преобразователи тока и напряжение, разрешающие эксплуатацию двух электродвигателей одновременно под совместной нагрузкой. Хотя, у обоих моторов есть собственный частотник и линия дополнительного управления между преобразователями.
Два равных электродвигателя подключить проблематично. Поочередно можно подключить без проблем, даже различных по параметрам. Подключение делают через пускатели и выключатели пакетного типа.
Micromaster может производить управление двумя электродвигателями сразу. Значения параметров нужно создать правильно, установить защищенность от нагрева отдельно.
На один частотный преобразователь можно ставить два двигателя, но на разные два вала. В частотнике на одни контакты протянуть от соответствующего электромотора по одному.
Приведем пример. У нас имеется два мотора по 0,5 кВт. Мы хотим чтобы они эксплуатировались вместе на одной нагрузке 0,8 кВт на преобразователь частоты. Приобретать сразу два преобразователя нецелесообразно, они работают синхронно, и производить регулировку двух преобразователей частоты неудобно.
Присоединение сразу обоих электромоторов с одним преобразователем частоты тока влечет за собой некоторые нюансы. Основная трудность – это защищенность двигателей. Трудно найти проблему неисправности с одним из двигателей при включении в цепь параллельно. Например, на одном преобразователе работают два мотора заводские. Работали три фрезы. Одна фреза вышла из строя, затупилась. Из-за этого стал нагреваться частотный преобразователь. Необходимо устанавливать на все двигатели тепловые реле с защитой преобразователя на максимальный ток и напряжение. В противном случае реле защиты частотника тока не может распознать неисправность. Плохо, если есть выключатель имеется у выхода преобразователя. В случае обрыва двигателя во время работы частотный преобразователь выйдет из строя.
Трудно найти проблему неисправности с одним из двигателей при включении в цепь параллельно. Например, на одном преобразователе работают два мотора заводские. Работали три фрезы. Одна фреза вышла из строя, затупилась. Из-за этого стал нагреваться частотный преобразователь. Необходимо устанавливать на все двигатели тепловые реле с защитой преобразователя на максимальный ток и напряжение. В противном случае реле защиты частотника тока не может распознать неисправность. Плохо, если есть выключатель имеется у выхода преобразователя. В случае обрыва двигателя во время работы частотный преобразователь выйдет из строя.
Тепловая защита имеет огромное значение, но возможно обойтись без нее. Разрешено на векторе быть без обратной связи, полное векторное трудно получить. В ходе эксперимента обнаружатся возможности. На исправном преобразователе на выходе все функционирует без трудностей. Если не перегружать конденсаторами частотники, то они служат долго.
На два электродвигателя хорошо подходят преобразователи Hyundai. Они имеют свою защиту от нагрева (тепловые реле), которая необходима на каждый мотор. Это определяется несколькими фактами:
Они имеют свою защиту от нагрева (тепловые реле), которая необходима на каждый мотор. Это определяется несколькими фактами:
- Нагрузка неравномерно распределена. Электрический ток разной величины на обоих двигателях.
- Наличие возможности выключения из работы одного мотора. Защита для мотора 0,8 кВт, встроенная в частотнике, не будет работать.
Рекомендуется делать равномерную нагрузку на частотник от обоих двигателей. Имеется ввиду нагрузка во время работы. Обрыв во время холостого хода нормально переносится преобразователем тока. При внезапном отключении напряжения питания пусковой выключатель, который коммутирует электродвигатель, отключался чаще, чем отключался частотник.
Lenze smd параллельное подключение двух электродвигателей
Если включить два электродвигателя параллельно к преобразователю частоты ESMD402L4TXA 4, то рекомендуется ставить тепловые реле для защищенности от токовых перегрузок. Для контролирования температуры необходимо поставить термодатчики.
Информация от инженеров: можно ли подключить два двигателя одновременно к частотнику?
1) Рекомендовано применять тепловые реле частотного преобразователя видов ТРП, РТТ, ТРН. Контакты, размыкающие эти реле, подсоединяются последовательным соединением к дискретному входу частотного преобразователя ESMD. Вход дискретный программируется функцией отключения из-за наружной поломки. Параметр имеет значение равное 10.
2) К таким частотникам допускается подключение тепловых реле. Они будут размыкать контакт при высокой температуре. При соединении двух датчиков контакты соединяются по последовательной схеме. Терморезисторы, термопары, датчики температуры не рекомендуются для применения.
Чаще всего при подключении двух электродвигателей к одному частотному преобразователю используют РТЛ тепловые реле, укомплектованные адаптером КРЛ, чтобы устанавливать их самому. Постоянно замкнутые контакты РТЛ теплового реле включены в цепь частотника Lenze. Постоянно разомкнутый контакт был подключен лампе сигнала при аварии электромотора.
Чтобы можно было соединить два электродвигателя параллельно, должны быть соблюдены законы:
- частота – напряжение, квадратичный закон;
- закон частота – напряжение с IR–компенсацией в автоматическом режиме.
Электрический ток частотника должен быть не менее суммы токов обоих электромоторов. Для этого используют наружную защиту тепловую для обоих двигателей с применением термореле или терморезисторов. Лучше между моторами и частотником установить фильтр выхода с функцией отсечки излишнего напряжения.
Наиболее применимы два варианта:
- Моторы с одинаковой мощностью. После настраивания частотника характеристика крутящего момента не изменяется.
- Электродвигатели с неодинаковой мощностью. Данные крутящего момента не оптимальные для двигателей.
Машиностроение — Эффективные способы привода одного вала несколькими двигателями?
Спросил
Изменено
1 месяц назад
Просмотрено
45 тысяч раз
$\begingroup$
Чтобы избежать вопроса «почему бы не использовать двигатель большего размера», я являюсь школьным наставником команды робототехники FTC (First Tech Challenge) с небольшим опытом работы в области мягкой механики и аппаратного обеспечения. Они несколько ограничены в том, что им разрешено использовать, в частности, двигатели. До 8 двигателей постоянного тока 1,5 фут-фунт 12 В, макс.
Они несколько ограничены в том, что им разрешено использовать, в частности, двигатели. До 8 двигателей постоянного тока 1,5 фут-фунт 12 В, макс.
В этом году они столкнулись с проблемой увеличения подъемной силы, с которой могла бы помочь передача, но для получения подъемной силы требовалось много скорости, что в очень коротком (~ 2 минуты) соревновании было дорогостоящим обменом. выключается, когда возникает необходимость часто подниматься и опускаться.
Возможности, которые я рассматривал (у меня пока не было времени возиться с ними, но я пытаюсь исследовать и получить информацию от инженеров лучше меня..)
- Наличие двух двигателей, напрямую приводящих в вал кажется первым очевидным ответом, но подвержен ошибкам (выскальзывание из синхронизации и потенциальное скрежетание).
- Два двигателя, приводящие в движение два отдельных шкива на ведомом валу, которые теоретически должны набирать мощность без проблем с заклиниванием шестерни.
Я планирую, чтобы дети поэкспериментировали и проверили, но так как мой опыт в МЭ крайне слаб, я прошу совета.
- машиностроение
- шестерни
- робототехника
- двигатели
$\endgroup$
1
$\begingroup$
Хотя механический дифференциал делает то, что вы просите, на самом деле он вам не нужен.
Два одинаковых электродвигателя можно соединить на одном валу. Нет никакого «выскальзывания из синхронизации», потому что в первую очередь нет проблемы с синхронизацией. Управляйте двумя двигателями одинаково, и оба они будут развивать близкий к одному и тому же крутящий момент. Один будет иметь немного больший крутящий момент, чем другой, но два крутящих момента все равно складываются. В небольшом несоответствии нет ничего плохого.
В худшем случае вы крутите один мотор на полную мощность, а другой совсем нет. Неприводной двигатель просто добавит небольшую фрикционную нагрузку на вал, пока его электрические соединения остаются открытыми. Пока вы крутите каждый двигатель достаточно сильно, чтобы он вращался с этой скоростью вала без нагрузки, это ничего не замедлит. Вам придется управлять двумя двигателями значительно по-разному, чтобы один добавил крутящий момент на вал, а другой добавил сопротивление.
Пока вы крутите каждый двигатель достаточно сильно, чтобы он вращался с этой скоростью вала без нагрузки, это ничего не замедлит. Вам придется управлять двумя двигателями значительно по-разному, чтобы один добавил крутящий момент на вал, а другой добавил сопротивление.
Предполагается, что у вас нет контроллера с обратной связью, который пытается регулировать скорость двигателя. Пока ваш контроллер изменяет только эффективное эквивалентное напряжение, которое видит двигатель, прямое соединение двух двигателей нормально.
$\endgroup$
6
$\begingroup$
Дифференциал — это механическое устройство, предназначенное именно для того, что вы предлагаете. Это позволит двум двигателям вращаться с несколько разной скоростью, сохраняя при этом общую мощность. Чаще всего дифференциал используется в трансмиссии автомобиля, в котором он используется для привода обоих колес от одного двигателя, при этом позволяя колесам вращаться с разной скоростью, т. Е. Действуя в обратном направлении от приложения, которое вы ищете. .
Е. Действуя в обратном направлении от приложения, которое вы ищете. .
$\endgroup$
3
$\begingroup$
Соединение двух двигателей раньше было проблемой. Они уравновешивали бы их, контролируя потребляемый ток между ними и баланс. Соединение двух двигателей больше не является проблемой с появлением цифровых приводов, которые могут соединяться друг с другом. Это решает старую муфту двух валов с домкратом.
$\endgroup$
$\begingroup$
Электродвигатели (постоянного тока) при использовании в троллейбусах не были на одном валу, но все же должны были работать вместе и оставаться «синхронно». Обычно они соединялись последовательно для получения наилучшего пускового момента, а когда тележка двигалась, снова соединялись параллельно. Из этого следует, что какое бы решение вы ни выбрали для привода с одним валом — я предпочитаю оба двигателя на одном валу — вы должны следовать аналогичному плану, чтобы обеспечить наиболее полезные рабочие характеристики.
$\endgroup$
1
Твой ответ
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Типы двигателей и принципы их работы (для коммерческого и промышленного применения)
Двигатели — механические или электромеханические устройства, преобразующие энергию в движение. Энергия в виде электрической, гидравлической или пневматической энергии преобразуется во вращательное или линейное движение, а затем выводится на вал или другой компонент силовой передачи, где она выполняет полезную работу. Электрические двигатели включают разновидности переменного или постоянного тока, которые далее подразделяются на электрические двигатели специального назначения, включая мотор-редукторы, шаговые двигатели, серводвигатели и линейные двигатели. Гидравлические и пневматические двигатели используют жидкость (масло, воздух) в качестве движущей силы. Химические двигатели включают подвесные моторы для использования на лодках и ракетные двигатели, оба из которых используют внутреннее сгорание и часто называются двигателями. Электрический двигатель, используемый для приведения в движение небольших рыбацких лодок, называется троллинговым двигателем. Ни одна из этой последней группы здесь не обсуждается.
Электрический двигатель, используемый для приведения в движение небольших рыбацких лодок, называется троллинговым двигателем. Ни одна из этой последней группы здесь не обсуждается.
Типы двигателей (и как они работают)
Двигатели переменного тока
Двигатели переменного тока представляют собой электромеханические устройства, питаемые переменным током для создания вращательного движения. Вращение обеспечивает механическую работу для привода других вращающихся машин, таких как насосы. Стандартные размеры рам доступны для различных мощностей, что облегчает взаимозаменяемость. Корпуса могут варьироваться от простых открытых конструкций до взрывозащищенных, невентилируемых конструкций, причем широко распространены полностью закрытые конструкции с вентиляторным охлаждением (TEFC). Международная рейтинговая система также предписывает уровни охлаждения и защиты. Двигатели переменного тока составляют большую часть двигателей, используемых сегодня, и приводят в действие насосы, вентиляторы, компрессоры и т. Д. Размеры варьируются от машин с меньшей мощностью до 20 000 л.с. больших размеров с блоками метрических размеров. Двигатели переменного тока бывают однофазными или трехфазными.
Д. Размеры варьируются от машин с меньшей мощностью до 20 000 л.с. больших размеров с блоками метрических размеров. Двигатели переменного тока бывают однофазными или трехфазными.
Трехфазные машины классифицируются по конструкции ротора: с короткозамкнутым ротором или с фазным ротором. В конструкциях с короткозамкнутым ротором используются медные или алюминиевые стержни ротора, закороченные концевыми кольцами, и в некотором смысле они представляют собой настоящие асинхронные машины — своего рода вращающийся трансформатор. В роторах с обмоткой используются полюса ротора с проволочной обмоткой, количество которых равно количеству полюсов на статоре, а токосъемные кольца обеспечивают метод ввода сопротивления для запуска и изменения скорости. Полное напряжение или прямой запуск трехфазных машин возможен примерно до 200 л.с., после чего часто необходим метод пониженного напряжения, особенно для двигателей, которые часто запускаются, из-за заметного падения напряжения, влияющего на освещение. , другие моторы и т.д.
, другие моторы и т.д.
Однофазные двигатели используются в основном в диапазонах долей л.с. Они не являются самозапускающимися и могут быть сгруппированы по способу запуска. В наиболее широко используемой конструкции — двигателе с расщепленной фазой — используются две обмотки статора для получения пары несбалансированных токов обмоток, при этом вспомогательная обмотка отключается, когда скорость двигателя приближается к синхронной. Конденсаторный двигатель вставляет конденсатор во вспомогательную обмотку, которая в случае машины с конденсаторным пуском выпадает, когда двигатель приближается к рабочей скорости, а в случае двигателя с двухзначным конденсатором переключается на второй конденсатор, когда он приближается. скорость бега. В конструкции с постоянным разделенным конденсатором вспомогательная обмотка и конденсатор остаются под напряжением на рабочей скорости. Наконец, в двигателе с экранированными полюсами используются неравномерно разделенные полюса с экранирующими катушками, которые заставляют вращающееся поле двигаться в направлении экранированного полюса (т. Е. Необратимо). Двигатели с экранированными полюсами являются одними из самых дешевых однофазных машин. Синхронные однофазные двигатели используются в устройствах времени.
Е. Необратимо). Двигатели с экранированными полюсами являются одними из самых дешевых однофазных машин. Синхронные однофазные двигатели используются в устройствах времени.
Для получения дополнительной информации ознакомьтесь с нашей полной статьей о типах двигателей переменного тока.
Двигатели постоянного тока
Двигатели постоянного тока представляют собой электромеханические устройства, питаемые постоянным током, для создания вращательного движения. Движение обеспечивает вращательную работу для привода других вращающихся машин, таких как подъемники, с различной скоростью. Определенные схемы проводки могут создавать сильный крутящий момент на низкой скорости, что делает их подходящими в качестве тяговых двигателей для локомотивов, хотя они в значительной степени были заменены двигателями с регулируемой частотой. Точно так же двигатели тележек для гольфа неуклонно перестраиваются с щеточных конструкций на более совершенные формы с электронными приводами. Стандартные размеры рам доступны для различных мощностей, что облегчает взаимозаменяемость. Корпуса могут варьироваться от простых открытых конструкций до взрывозащищенных невентилируемых конструкций. Международная рейтинговая система также предписывает уровни охлаждения и защиты. Двигатели постоянного тока имеют множество применений в игрушках и потребительских товарах и широко используются автопроизводителями. Они находят применение в лифтах, электрических вилочных погрузчиках и конвейерах, где нагрузки с постоянным крутящим моментом являются нормальными. Двигатели постоянного тока бывают щеточными и бесщеточными (с постоянными магнитами), для работы последних требуются электронные приводы и контроллеры.
Корпуса могут варьироваться от простых открытых конструкций до взрывозащищенных невентилируемых конструкций. Международная рейтинговая система также предписывает уровни охлаждения и защиты. Двигатели постоянного тока имеют множество применений в игрушках и потребительских товарах и широко используются автопроизводителями. Они находят применение в лифтах, электрических вилочных погрузчиках и конвейерах, где нагрузки с постоянным крутящим моментом являются нормальными. Двигатели постоянного тока бывают щеточными и бесщеточными (с постоянными магнитами), для работы последних требуются электронные приводы и контроллеры.
Традиционные щеточные двигатели постоянного тока классифицируются на основе возбуждения, используемого в обмотке возбуждения, с тремя основными различиями: шунтовое, последовательное и составное. Шунтовые двигатели имеют низкий пусковой момент, низкую перегрузочную способность, минимальное изменение скорости в зависимости от нагрузки и плохую стабильность при нулевой нагрузке. Серийные двигатели имеют высокие пусковые моменты, высокую перегрузочную способность, значительное изменение скорости в зависимости от нагрузки и хорошую стабильность при нулевой нагрузке. Составные двигатели находятся где-то между двумя другими по рабочим характеристикам, хотя они также остаются стабильными при нулевой нагрузке.
Серийные двигатели имеют высокие пусковые моменты, высокую перегрузочную способность, значительное изменение скорости в зависимости от нагрузки и хорошую стабильность при нулевой нагрузке. Составные двигатели находятся где-то между двумя другими по рабочим характеристикам, хотя они также остаются стабильными при нулевой нагрузке.
Для двигателей постоянного тока мощностью более 3/4 л.с. необходимо использовать пускатели для ограничения пускового тока во избежание возгорания коллекторов.
Мотор-редукторы
Мотор-редукторы представляют собой электромеханические устройства с питанием от переменного или постоянного тока для создания вращательного движения. Движение обеспечивает вращательную работу, которая затем понижается через встроенный редуктор для привода других вращающихся машин, таких как конвейеры или упаковочные машины. Мотор-редукторы используются там, где требуется, чтобы двигатели и редукторы создавали высокий крутящий момент на малых скоростях. Интегрируя два компонента, мотор-редукторы достигают эффективности в размерах, устраняют внешние муфты, повышают устойчивость к промывке и т. д. Часто редукторы взаимозаменяемы между производителями. Хотя это редкость для больших двигателей, мотор-редукторы довольно распространены с дробными размерами л.с. Они доступны с различными типами выходных валов, включая двигатели переменного тока, щеточные и бесщеточные двигатели постоянного тока.
д. Часто редукторы взаимозаменяемы между производителями. Хотя это редкость для больших двигателей, мотор-редукторы довольно распространены с дробными размерами л.с. Они доступны с различными типами выходных валов, включая двигатели переменного тока, щеточные и бесщеточные двигатели постоянного тока.
Шаговые двигатели
Шаговые двигатели
представляют собой электромеханические устройства, работающие от переменного тока, для создания вращательного движения и позиционирования. Как правило, шаговые двигатели не имеют контура обратной связи, как серводвигатели, а вместо этого обеспечивают управление положением, поворачивая ротор двигателя на дискретное количество шагов. Они специфичны для приложений управления движением. Шаговые двигатели используются в приложениях позиционирования, где важно удержание положения, и используются на упаковочных машинах, принтерах и т. д., где потеря положения из-за перегрузки не критична и важна экономичность.
Серводвигатели
Серводвигатели представляют собой электромеханические устройства с питанием от переменного или постоянного тока для создания вращательного движения и позиционирования. Серводвигатели используют контур обратной связи для управления радиальным положением ротора двигателя относительно его статора. Они специфичны для приложений управления движением. Серводвигатели используются в приложениях позиционирования, где первостепенное значение имеет плавное контролируемое движение, например, в промышленных роботах. Упаковочная машина может использовать серводвигатель для подачи точного количества упаковочной пленки в зону формования во втором примере, где в прошлом такая подача могла контролироваться с помощью механического индексатора с приводом от двигателя.
Серводвигатели используют контур обратной связи для управления радиальным положением ротора двигателя относительно его статора. Они специфичны для приложений управления движением. Серводвигатели используются в приложениях позиционирования, где первостепенное значение имеет плавное контролируемое движение, например, в промышленных роботах. Упаковочная машина может использовать серводвигатель для подачи точного количества упаковочной пленки в зону формования во втором примере, где в прошлом такая подача могла контролироваться с помощью механического индексатора с приводом от двигателя.
Линейные двигатели
Линейные двигатели
— это электромеханические устройства, работающие на переменном или постоянном токе и обеспечивающие линейное, а не вращательное движение. Линейное движение полезно в приложениях, где можно использовать пневматический цилиндр, но требуется большая точность и позиционная обратная связь, или где движение может варьироваться от хода к ходу. Также могут возникнуть проблемы с конфигурацией двигателя и формой силового механизма/ползунка. Линейные двигатели используются в упаковочных машинах, сборочных машинах, погрузочно-разгрузочном оборудовании и в различных приложениях в медицинском оборудовании.
Линейные двигатели используются в упаковочных машинах, сборочных машинах, погрузочно-разгрузочном оборудовании и в различных приложениях в медицинском оборудовании.
Пневматические двигатели
Пневматические двигатели — это механические устройства, приводимые в действие давлением воздуха для создания вращательного движения. Движение обеспечивает вращательную работу для привода других вращающихся машин, таких как приемные барабаны и инструменты. Пневматические двигатели используются там, где доступен источник сжатого воздуха и где требуется постоянный крутящий момент независимо от скорости, например, в приемной бобине на упаковочной машине. Они также используются во взрывоопасных средах, где они считаются искробезопасными.
Гидравлические двигатели
Гидравлические двигатели представляют собой механические устройства, приводимые в действие жидкостью для создания вращательного движения. Движение обеспечивает вращательную работу для привода других вращающихся элементов, таких как ведущие колеса тяжелого экскаватора. Гидравлические двигатели широко используются в строительной технике, где требуется вращательное движение от компактного устройства, а гидравлическая мощность уже доступна. Гидравлические двигатели могут быть лопастными, шестеренчатыми или поршневыми, как и гидравлические насосы. LSHT, или низкоскоростные двигатели с высоким крутящим моментом, доступны у некоторых производителей. Модифицированный двигатель лопастного типа, называемый двигателем с вращающимся упором, должен иметь более низкое трение и лучшее уплотнение, чем эквивалентный лопастной двигатель.
Гидравлические двигатели широко используются в строительной технике, где требуется вращательное движение от компактного устройства, а гидравлическая мощность уже доступна. Гидравлические двигатели могут быть лопастными, шестеренчатыми или поршневыми, как и гидравлические насосы. LSHT, или низкоскоростные двигатели с высоким крутящим моментом, доступны у некоторых производителей. Модифицированный двигатель лопастного типа, называемый двигателем с вращающимся упором, должен иметь более низкое трение и лучшее уплотнение, чем эквивалентный лопастной двигатель.
Различные применения двигателей и отрасли промышленности
Среди двигателей переменного тока, постоянного тока, редукторные, воздушные и гидравлические разновидности обеспечивают вращательное движение, а шаговые, серводвигатели и линейные двигатели обеспечивают позиционирование. Двигатель переменного тока, скорее всего, подойдет для привода насоса; двигатель постоянного тока хорошо подходит для привода барабана крана, где важна переменная скорость; мотор-редукторы выполняют те же функции, что и обычные двигатели переменного и постоянного тока, за исключением того, что они оснащены встроенными редукторами; а воздушные и гидравлические двигатели удовлетворяют аналогичные потребности в ситуациях, когда электричество нецелесообразно или не подходит.
Позиционирование относится к остальным трем типам, а это означает, что эти типы используются там, где элементы машины необходимо перемещать в точно заданные места. В то время как роторные двигатели охватывают весь спектр размеров от очень маленьких субдробных единиц HP до самых больших машин выше NEMA, шаговые, сервоприводы и линейные двигатели обычно имеют максимальную мощность в несколько лошадиных сил и превосходят их в меньших размерах.
Трехфазные асинхронные двигатели переменного тока повсеместно используются в промышленности. В них используются роторы с короткозамкнутым ротором (бесщеточные), которые индуцируют магнитные поля в полюсных обмотках, которые затем взаимодействуют с магнитными полями обмоток статора, создавая вращение. Скорость двигателя переменного тока зависит от количества полюсов и частоты приложенного напряжения, особенно часто встречаются 1800 (4-полюсный) и 3600 об/мин (2-полюсный). Фактическая скорость немного отстает от номинальной скорости вращающегося магнитного поля или линейной скорости и зависит от нагрузки. Синхронные двигатели переменного тока точно соответствуют скорости вращающегося поля, независимо от нагрузки, но их применение, как правило, ограничивается особыми случаями, когда это критично, например, в мотор-генераторах. В другом синхронном двигателе, так называемом двигателе переменного тока с постоянными магнитами, используется та же технология с постоянными магнитами, что и в бесщеточных конструкциях постоянного тока, для создания синхронных двигателей переменного тока, которые доступны в дробных и целых размерах л.с. Эти двигатели требуют электронных приводов. Двигатели переменного тока по своей природе не подходят для управления скоростью, хотя существует ряд методов как в конструкции двигателя (обмотанный ротор), так и в схеме контроллера, позволяющих сделать возможным управление скоростью. Несколько обмоток — один из способов получения двухскоростного асинхронного двигателя. Преобразователи частоты могут обеспечивать бесступенчатую регулировку скорости. Доступны также различные пусковые устройства, такие как устройства плавного пуска, которые помогают уменьшить воздействие пуска двигателя, например, на бутылки на конвейерной линии.
Синхронные двигатели переменного тока точно соответствуют скорости вращающегося поля, независимо от нагрузки, но их применение, как правило, ограничивается особыми случаями, когда это критично, например, в мотор-генераторах. В другом синхронном двигателе, так называемом двигателе переменного тока с постоянными магнитами, используется та же технология с постоянными магнитами, что и в бесщеточных конструкциях постоянного тока, для создания синхронных двигателей переменного тока, которые доступны в дробных и целых размерах л.с. Эти двигатели требуют электронных приводов. Двигатели переменного тока по своей природе не подходят для управления скоростью, хотя существует ряд методов как в конструкции двигателя (обмотанный ротор), так и в схеме контроллера, позволяющих сделать возможным управление скоростью. Несколько обмоток — один из способов получения двухскоростного асинхронного двигателя. Преобразователи частоты могут обеспечивать бесступенчатую регулировку скорости. Доступны также различные пусковые устройства, такие как устройства плавного пуска, которые помогают уменьшить воздействие пуска двигателя, например, на бутылки на конвейерной линии.
Другой двигатель переменного тока, называемый универсальным или двигателем переменного тока серии , используется во многих бытовых приборах, таких как пылесосы, дрели, вакуумные системы и т. д. Он использует те же щетки и коллектор, что и двигатель постоянного тока, но может работать от переменного тока, поскольку направление переключения тока возбуждения точно соответствует направлению коммутируемого тока якоря. Они, как правило, шумны при работе и лучше всего подходят для периодического использования, например, в электроинструментах, из-за износа щеток, но они могут регулировать скорость.
Двигатели постоянного тока обеспечивают внутреннюю регулировку скорости благодаря своей конструкции и использованию нечастотного постоянного тока в качестве движущей силы. В двигателе постоянного тока обычно используются щетки для подачи постоянного тока на ротор. Управляя уровнем напряжения постоянного тока, оператор может напрямую управлять скоростью двигателя. Двигатели постоянного тока этой конструкции, иногда называемые коллекторными двигателями из-за коллектора, установленного на валу, на котором вращаются щетки, широко используются в автомобилях и в небольших устройствах. В своих больших размерах они используются в приложениях, где контроль скорости является обязательным: подъемники и краны, станки, прессы и т. д. С появлением более сильных магнитов стали популярны двигатели постоянного тока с постоянными магнитами, которые обходятся без щеток. Эти двигатели несколько ограничены по размеру, около одной лошадиной силы на верхнем конце, и требуют приводов для их электронного переключения. Прорези между зубьями обмотки статора вызывают явление, известное как «зубчатость», и конструкции без прорезей представляют собой попытку преодолеть это явление. Доступны определенные конструкции с постоянными магнитами, которые обеспечивают высокий крутящий момент на низких скоростях, например, двигатели BLDC типа блина, которые особенно подходят для роботизированных приложений.
Двигатели постоянного тока этой конструкции, иногда называемые коллекторными двигателями из-за коллектора, установленного на валу, на котором вращаются щетки, широко используются в автомобилях и в небольших устройствах. В своих больших размерах они используются в приложениях, где контроль скорости является обязательным: подъемники и краны, станки, прессы и т. д. С появлением более сильных магнитов стали популярны двигатели постоянного тока с постоянными магнитами, которые обходятся без щеток. Эти двигатели несколько ограничены по размеру, около одной лошадиной силы на верхнем конце, и требуют приводов для их электронного переключения. Прорези между зубьями обмотки статора вызывают явление, известное как «зубчатость», и конструкции без прорезей представляют собой попытку преодолеть это явление. Доступны определенные конструкции с постоянными магнитами, которые обеспечивают высокий крутящий момент на низких скоростях, например, двигатели BLDC типа блина, которые особенно подходят для роботизированных приложений. Существуют также небольшие двигатели постоянного тока, называемые микродвигателями , которые используются в электронных устройствах и т. п., часто питаясь от аккумуляторов.
Существуют также небольшие двигатели постоянного тока, называемые микродвигателями , которые используются в электронных устройствах и т. п., часто питаясь от аккумуляторов.
Мотор-редукторы доступны в версиях переменного и постоянного тока, как правило, небольшого размера, где практично тесное соединение двигателя и редуктора. Доступны мотор-редукторы с различными редукторами, такими как параллельный вал, угловой редуктор, планетарная передача и т. д.
Шаговые двигатели предназначены для позиционирования. Они полагаются на постоянные магниты на своих роторах, которыми можно управлять с дискретными интервалами, возбуждая поле статора. Для работы шагового двигателя требуется контроллер/привод. Шаговые двигатели обычно индексируют 1,8 или меньше градусов вращения для каждого шага, но их можно дополнительно разделить за счет использования так называемых микрошаговых контроллеров. Конструкция двигателя также влияет на разрешающую способность шагового двигателя — количество шагов на один оборот — 5-фазные двигатели обеспечивают большее количество шагов, чем 2-фазные двигатели. Шаговые двигатели обеспечивают относительно недорогой способ имитации позиционирования сервопривода, хотя в них обычно отсутствует позиционная обратная связь. Шаговые двигатели обычно могут удерживать нагрузку во время остановки, что является преимуществом для приложений позиционирования.
Шаговые двигатели обеспечивают относительно недорогой способ имитации позиционирования сервопривода, хотя в них обычно отсутствует позиционная обратная связь. Шаговые двигатели обычно могут удерживать нагрузку во время остановки, что является преимуществом для приложений позиционирования.
Серводвигатели — это позиционеры с истинной обратной связью, которые включают энкодеры для передачи информации о положении своим контроллерам. Они контролируют как скорость, так и точность за счет использования контуров обратной связи. Специальный серводвигатель, называемый моментным двигателем, предназначен для приложения крутящего момента к валу без необходимости его вращения, что может потребоваться для поддержания постоянного натяжения натяжного устройства полотна. Конструкция позволяет двигателю развивать крутящий момент в остановленном состоянии без перегрева. Его также можно использовать для прямого доступа к таблицам индексации.
Линейные двигатели лучше всего рассматривать как роторные двигатели, которые были «развернуты» для создания роторов, движущихся по линейным траекториям. Обычно они управляются сервоприводом, но также могут быть основаны на шаговых двигателях и использоваться для позиционирования и точного управления скоростью, чего нельзя достичь с помощью более дешевых средств, таких как воздушные цилиндры и т. д. Некоторые производители предлагают линейные двигатели, которые также могут вращаться. Как и для любого серводвигателя или шагового двигателя, для линейных двигателей требуются электронные приводы/контроллеры.
Обычно они управляются сервоприводом, но также могут быть основаны на шаговых двигателях и использоваться для позиционирования и точного управления скоростью, чего нельзя достичь с помощью более дешевых средств, таких как воздушные цилиндры и т. д. Некоторые производители предлагают линейные двигатели, которые также могут вращаться. Как и для любого серводвигателя или шагового двигателя, для линейных двигателей требуются электронные приводы/контроллеры.
Пневматические двигатели просто приводятся в действие воздухом, а не электричеством, и обычно используются в пневматических инструментах, таких как пневматические ключи и т. д. Пневматические двигатели используются там, где требуется постоянный крутящий момент, например, на приемных барабанах на машинах для обработки полотна. Они также используются во взрывоопасных средах, поскольку считаются искробезопасными. Скорость пневматического двигателя можно несколько изменить, дросселируя впускной клапан, что позволяет бесплатно регулировать скорость, например, при использовании на подъемнике.
Гидравлические двигатели приводятся в действие гидравлической жидкостью и обычно устанавливаются на вращающихся элементах строительного оборудования, например, в колесных двигателях. Они мощные для своего размера, легко реверсируются и регулируются по скорости. Им требуются источники гидравлической энергии, которая на строительной технике с приводом от двигателя обычно обеспечивается гидравлическими насосами/системами. Стационарные установки с меньшей вероятностью будут иметь гидравлическую энергию в качестве коммунальных услуг, поскольку они будут использовать сжатый воздух, но для них доступны так называемые гидравлические блоки питания.
Соображения
Двигатели переменного и постоянного тока доступны в стандартных размерах корпуса NEMA, что делает двигатели этих размеров взаимозаменяемыми. Их иногда называют агрегатами Integral HP или просто средними машинами. Двигатели также бывают в виде единиц с дробным числом л.с., называемых FHP или просто малыми, и в виде нестандартных конструкций за пределами интегральных рам NEMA, иногда называемых большими машинами. IEC предлагает аналогичные стандартизированные метрические корпуса и отсеки двигателей.
IEC предлагает аналогичные стандартизированные метрические корпуса и отсеки двигателей.
Варианты защиты обычно указываются в одной из двух форм: код или классификация NEMA и код IEC. Большинство двигателей относятся к полностью закрытым двигателям с вентиляторным охлаждением, сокращенно TEFC, но имеется множество разновидностей от открытых, каплезащитных (ODP) до полностью закрытых, невентилируемых (TENV). Код IEC обеспечивает аналогичную классификацию с помощью двузначного числового кода, первый из которых определяет степень защиты корпуса от твердых предметов, а второй — уровень защиты от проникновения влаги. Например, двигатель со степенью защиты IP67 считается пыленепроницаемым и водонепроницаемым. Погружные двигатели, охлаждаемые иммерсионной жидкостью, доступны для скважинных насосов и т.п.
NEMA также проводит различие между двигателями непрерывного и повторно-кратковременного режима работы. Двигатель с повторно-кратковременным режимом работы предназначен для нечастого использования с достаточным охлаждением между пусками, как это может быть в случае с недорогим воздушным компрессором, который также имеет рабочие циклы менее 100%. Также существует пятибуквенная рейтинговая система NEMA для описания эксплуатации двигателя, например «A», которая может использоваться для вентилятора, который не нужно запускать под нагрузкой, или «C», которая подходит для конвейер, который, вероятно, будет запущен под нагрузкой.
Также существует пятибуквенная рейтинговая система NEMA для описания эксплуатации двигателя, например «A», которая может использоваться для вентилятора, который не нужно запускать под нагрузкой, или «C», которая подходит для конвейер, который, вероятно, будет запущен под нагрузкой.
Эти же коды могут применяться и к другим типам двигателей, особенно к редукторным, шаговым и серводвигателям.
Варианты монтажа включают монтаж на основании или на лапах, а также монтаж на лицевой стороне. В первом варианте двигатели поддерживаются на собственных основаниях — часто на одной раме с ведомым оборудованием, тогда как во втором варианте двигатели крепятся к корпусам ведомого оборудования, что иногда используется с насосами. Некоторые двигатели специально предназначены для работы в вертикальном положении. Эти так называемые двигатели специального назначения предназначены для привода насосов и особенно подходят для работы в ограниченном пространстве, например, на борту судов.
Номинальная скорость и мощность являются основными параметрами для определения двигателей вращательного типа. Количество фаз тоже важно, обычно одна или три.
Количество фаз тоже важно, обычно одна или три.
Важные атрибуты и критерии выбора
Тип двигателя
Для блоков переменного тока основной выбор — между асинхронными и синхронными двигателями. Тормозные двигатели представляют собой асинхронные машины со встроенными тормозами, которые могут удерживать нагруженный двигатель на месте. Для машин постоянного тока основным выбором является бесщеточный агрегат или агрегат, в котором используются щетки. Мотор-редукторы предлагают многие из этих вариантов.
Отраслевая направленность/Предполагаемое применение
Многие двигатели предназначены для общего режима работы, в то время как некоторые из них имеют специальные функции или номинальные режимы работы, подходящие для конкретных приложений. NEMA определяет множество двигателей специального назначения, в том числе для вентиляторов и воздуходувок, деревообрабатывающих станков и т. д. Производители часто классифицируют свои двигатели специального назначения по этим признакам, т. е. для работы в сельском хозяйстве, ОВКВ, для промывки и т. д. Спецификаторы двигателей могут полагаться на эти атрибуты, чтобы сузить выбор, если смотреть за пределы диапазона двигателей общего назначения. Например, 400 Гц. двигатели, предназначенные для авиационных и аэрокосмических применений. В некоторых приложениях, таких как вибраторы для обработки материалов, могут использоваться электрические или пневматические двигатели.
е. для работы в сельском хозяйстве, ОВКВ, для промывки и т. д. Спецификаторы двигателей могут полагаться на эти атрибуты, чтобы сузить выбор, если смотреть за пределы диапазона двигателей общего назначения. Например, 400 Гц. двигатели, предназначенные для авиационных и аэрокосмических применений. В некоторых приложениях, таких как вибраторы для обработки материалов, могут использоваться электрические или пневматические двигатели.
Вращение вала
Как правило, трехфазные асинхронные двигатели являются реверсивными. Многие из них можно заставить работать в противоположном направлении, переключая провода в месте их подключения к двигателю. Некоторые двигатели, особенно небольшие синхронные двигатели, используемые для управления заслонками и т. д., являются однонаправленными, но часто могут быть указаны как вращение по часовой стрелке или против часовой стрелки. Вращение двигателя обычно определяется, если смотреть со стороны привода (DE), то есть конца двигателя со стороны нагрузки или со стороны соединения. Для нереверсивных двигателей постоянного тока, однофазных двигателей переменного тока, синхронных и универсальных двигателей обычно используется направление CW.
Для нереверсивных двигателей постоянного тока, однофазных двигателей переменного тока, синхронных и универсальных двигателей обычно используется направление CW.
Напряжение двигателя
Двигатели среднего напряжения обычно работают от 2300 или 4000 вольт. Небольшие трехфазные двигатели общего назначения могут работать от источников питания 208–230 или 460 вольт. Однофазные двигатели обычно работают от сети 115 или 230 вольт.
NEMA Class Design Rating
NEMA поддерживает ряд рейтингов для конструкции двигателя, которые определяют изоляцию и повышение температуры, которое он должен выдерживать.
Конструкция вала
Валы двигателя и могут быть заказаны со шпоночными пазами или плоскими гранями для крепления муфт и т. д. Они также могут быть короче стандартных валов. Валы также могут иметь резьбу для крепления резьбовых крепежных деталей.
Ресурсы
Торговые ассоциации
- http://www.motioncontrolonline.
 org/
org/ - http://www.nema.org/pages/default.aspx
- http://www.easa.com/
Нормы и стандарты
Стандартов двигателей слишком много, чтобы их перечислять, но читатель может обратиться к организациям по стандартизации, таким как NEMA, IEC и NFPA (Nat’l Fluid Power Assn.) за их исчерпывающими коллекциями стандартов двигателей. Выборка включает:
- SAE J744 Монтаж гидравлического насоса/двигателя и размеры привода
- Двигатели и генераторы NEMA MG1
- Малые электродвигатели NEMA SEM S1
- IEC 60034 Вращающиеся электрические машины
- NEMA ICS 16 Двигатели с управлением движением/положением, управление, обратная связь
Внешние ссылки
- Электродвигатели Marathon — Типы и области применения — Gainseville Industrial
- Правильные шаги по хранению электродвигателей — Renown Electric
9Методы тестирования двигателей 0019 для реализации — Renown Electric
Сводка
В этом руководстве представлены основные сведения об электродвигателях и двигателях с гидравлическим приводом, а также об их выборе и использовании в различных условиях. Для получения дополнительной информации о дополнительных продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники или просмотреть сведения о конкретных продуктах.
Для получения дополнительной информации о дополнительных продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники или просмотреть сведения о конкретных продуктах.
Другие товары для двигателей
- Типы катушек индуктивности и сердечников
- Типы контроллеров двигателей и приводов
- Типы двигателей постоянного тока
- и двигатели постоянного тока — в чем разница?
- Все об асинхронных двигателях — что это такое и как они работают
- Типы двигателей переменного тока
- Все о синхронных двигателях — что это такое и как они работают
- — как они работают?
- Что такое двигатель с короткозамкнутым ротором и как он работает?
- Что такое двигатель с фазным ротором и как он работает?
- Все о реактивных двигателях — что это такое и как они работают
- Все о бесщеточных двигателях постоянного тока — что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- Синхронные двигатели и асинхронные двигатели — в чем разница?
- и щеточные двигатели — в чем разница?
- Кто изобрел паровой двигатель? Урок промышленной истории
- Все о двигателях с электронным управлением — что это такое и как они работают
- и серводвигатели — в чем разница?
- и двигатели постоянного тока — в чем разница?
- Все о контроллерах серводвигателей — что это такое и как они работают
- Что такое трехфазный двигатель и как он работает?
- ECM Motors и PSC Motors — в чем разница?
- Все о устройствах плавного пуска двигателей: что это такое и как они работают
- Все о контроллерах двигателей постоянного тока — что это такое и как они работают
- Основы тестирования двигателя (и ротора)
- Что такое штамповка двигателя и как это работает?
Двигатели переменного тока
Однофазные промышленные двигатели
Шаговые двигатели
Бесщеточные двигатели
Двигатели постоянного тока
Шаговые двигатели
Больше из Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Как работают двигатели и как правильно выбрать двигатель для любого проекта
Двигатели можно найти практически везде. Это руководство поможет вам узнать об электродвигателях, доступных типах и о том, как правильно выбрать двигатель. Основные вопросы, на которые необходимо ответить при принятии решения о том, какой двигатель наиболее подходит для применения, — это какой тип выбрать и какие технические характеристики имеют значение.
Это руководство поможет вам узнать об электродвигателях, доступных типах и о том, как правильно выбрать двигатель. Основные вопросы, на которые необходимо ответить при принятии решения о том, какой двигатель наиболее подходит для применения, — это какой тип выбрать и какие технические характеристики имеют значение.
Как работают двигатели?
Электродвигатели работают путем преобразования электрической энергии в механическую для создания движения. Сила создается внутри двигателя за счет взаимодействия между магнитным полем и обмоткой переменного (AC) или постоянного (DC) тока. С увеличением силы тока увеличивается и сила магнитного поля. Помните о законе Ома (V = I*R); напряжение должно увеличиваться, чтобы поддерживать тот же ток, когда сопротивление увеличивается.
Электродвигатели имеют множество применений. Традиционное промышленное использование включает воздуходувки, станки и электроинструменты, вентиляторы и насосы. Любители обычно используют двигатели в небольших приложениях, требующих движения, таких как робототехника или модули с колесами.
Типы двигателей:
Существует много типов двигателей постоянного тока , но наиболее распространенными являются щеточные или бесщеточные. Существуют также вибрационные двигатели, шаговые двигатели и серводвигатели.
Щеточные двигатели постоянного тока являются одними из самых простых и используются во многих бытовых приборах, игрушках и автомобилях. Они используют контактные щетки, которые соединяются с коммутатором для изменения направления тока. Они недороги в производстве, просты в управлении и обладают отличным крутящим моментом на низких скоростях (измеряется в оборотах в минуту или об/мин). Несколько недостатков заключаются в том, что они требуют постоянного обслуживания для замены изношенных щеток, имеют ограниченную скорость из-за нагрева щеток и могут генерировать электромагнитный шум из-за дугового разряда щеток.
Щеточный двигатель постоянного тока
Бесщеточные двигатели постоянного тока используют постоянные магниты в своем роторном узле.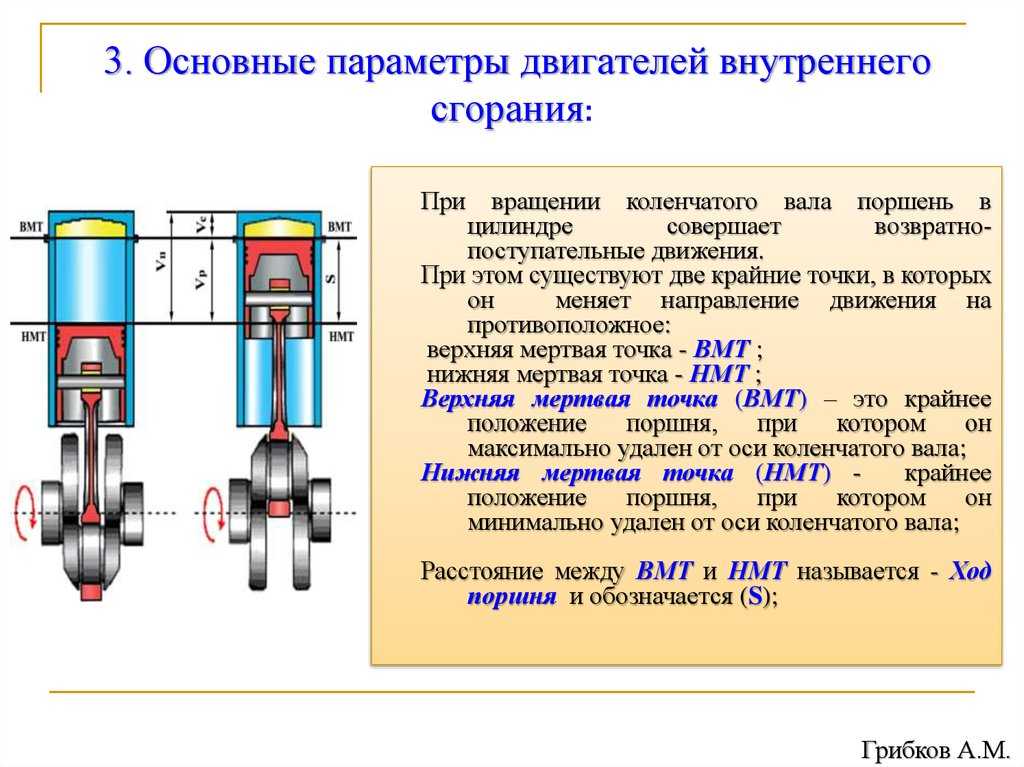 Они популярны на рынке хобби для самолетов и наземных транспортных средств. Они более эффективны, требуют меньше обслуживания, производят меньше шума и имеют более высокую удельную мощность, чем коллекторные двигатели постоянного тока. Они также могут производиться серийно и напоминают двигатель переменного тока с постоянным числом оборотов в минуту, за исключением того, что они питаются от постоянного тока. Однако есть несколько недостатков, в том числе то, что ими трудно управлять без специального регулятора, и они требуют низких пусковых нагрузок и специальных редукторов в приводных приложениях, что приводит к более высоким капитальным затратам, сложности и экологическим ограничениям.
Они популярны на рынке хобби для самолетов и наземных транспортных средств. Они более эффективны, требуют меньше обслуживания, производят меньше шума и имеют более высокую удельную мощность, чем коллекторные двигатели постоянного тока. Они также могут производиться серийно и напоминают двигатель переменного тока с постоянным числом оборотов в минуту, за исключением того, что они питаются от постоянного тока. Однако есть несколько недостатков, в том числе то, что ими трудно управлять без специального регулятора, и они требуют низких пусковых нагрузок и специальных редукторов в приводных приложениях, что приводит к более высоким капитальным затратам, сложности и экологическим ограничениям.
Бесщеточный двигатель постоянного тока
Вибрационные двигатели используются для приложений, требующих вибрации, таких как мобильные телефоны или игровые контроллеры. Они генерируются электродвигателем и имеют неуравновешенную массу на приводном валу, которая вызывает вибрацию. Их также можно использовать в неэлектронных зуммерах, которые вибрируют для подачи звука или для сигналов тревоги или дверных звонков.
Их также можно использовать в неэлектронных зуммерах, которые вибрируют для подачи звука или для сигналов тревоги или дверных звонков.
Вибрационный двигатель
Когда требуется точное позиционирование, 9Шаговые двигатели 0159 — ваш друг. Они используются в принтерах, станках и системах управления технологическими процессами и рассчитаны на высокий удерживающий момент, что дает пользователю возможность переходить от одного шага к другому. У них есть система контроллера, которая определяет положение с помощью сигнальных импульсов, отправляемых драйверу, который интерпретирует их и отправляет пропорциональное напряжение на двигатель. Они относительно просты в изготовлении и управлении, но они постоянно потребляют максимальный ток. Небольшое расстояние между шагами ограничивает максимальную скорость, и при высоких нагрузках шаги можно пропускать.
Шаговый двигатель
Серводвигатели — еще один популярный двигатель на рынке хобби, который используется для управления положением без точности. Их популярные приложения включают приложения дистанционного управления, такие как игрушечные радиоуправляемые автомобили и робототехника. Они состоят из двигателя, потенциометра и схемы управления и в основном управляются с помощью широтно-импульсной модуляции (ШИМ) путем отправки электрических импульсов на провод управления. Сервоприводы могут быть как переменного, так и постоянного тока. Сервоприводы переменного тока могут выдерживать более высокие скачки тока и используются для промышленного оборудования, тогда как сервоприводы постоянного тока предназначены для небольших любительских приложений. Чтобы узнать больше о сервоприводах, ознакомьтесь с нашими Как работают серводвигатели статья.
Их популярные приложения включают приложения дистанционного управления, такие как игрушечные радиоуправляемые автомобили и робототехника. Они состоят из двигателя, потенциометра и схемы управления и в основном управляются с помощью широтно-импульсной модуляции (ШИМ) путем отправки электрических импульсов на провод управления. Сервоприводы могут быть как переменного, так и постоянного тока. Сервоприводы переменного тока могут выдерживать более высокие скачки тока и используются для промышленного оборудования, тогда как сервоприводы постоянного тока предназначены для небольших любительских приложений. Чтобы узнать больше о сервоприводах, ознакомьтесь с нашими Как работают серводвигатели статья.
Существует три основных типа двигателей переменного тока: асинхронные, синхронные и промышленные.
Асинхронные двигатели называются асинхронными двигателями, поскольку они не вращаются с одинаковой постоянной скоростью или медленнее, чем частота, подаваемая на питание.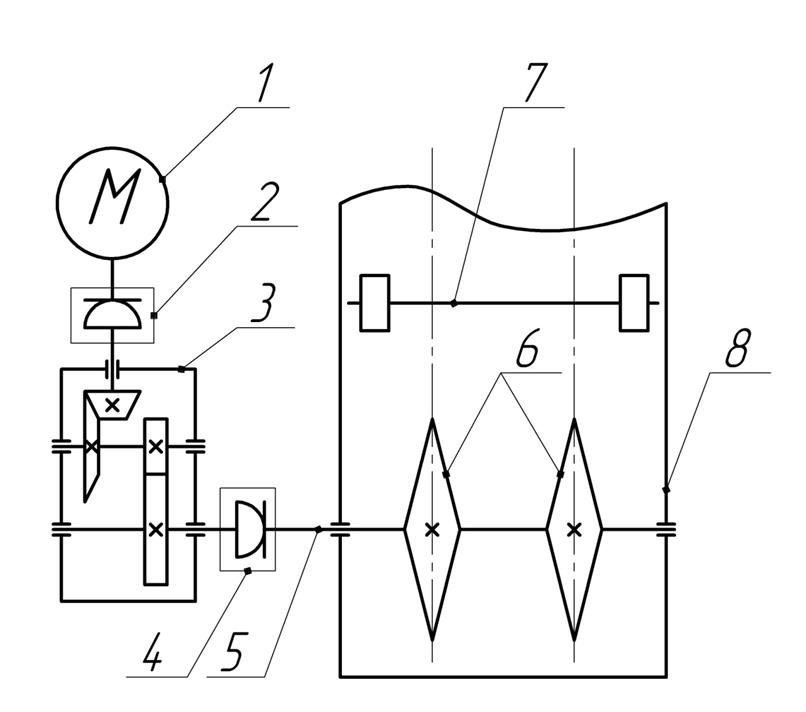 Скольжение , разница между фактической и синхронной скоростью, необходимо для создания крутящего момента , крутящей силы, вызывающей вращение, в асинхронных двигателях. Магнитное поле, окружающее ротор этих двигателей, вызвано наведенным током.
Скольжение , разница между фактической и синхронной скоростью, необходимо для создания крутящего момента , крутящей силы, вызывающей вращение, в асинхронных двигателях. Магнитное поле, окружающее ротор этих двигателей, вызвано наведенным током.
Ротор синхронных двигателей вращается с постоянной скоростью при подаче переменного тока. Их магнитное поле создается постоянными магнитами. Промышленные двигатели предназначены для трехфазных систем большой мощности, таких как конвейеры или воздуходувки. Двигатели переменного тока также можно найти в бытовой технике и других устройствах, таких как часы, вентиляторы и дисководы.
На что обратить внимание при покупке двигателя:
Есть несколько характеристик, на которые необходимо обратить внимание при выборе двигателя, но наиболее важными являются напряжение, ток, крутящий момент и скорость (об/мин).
Ток питает двигатель, и слишком большой ток может повредить двигатель. Для двигателей постоянного тока важны рабочий ток и ток останова. Рабочий ток — это среднее значение тока, которое двигатель должен потреблять при обычном крутящем моменте. Ток останова прикладывает достаточный крутящий момент, чтобы двигатель работал на скорости останова или 0 об/мин. Это максимальный ток, который должен потреблять двигатель, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает при напряжении выше номинального, чтобы предотвратить плавление катушек.
Для двигателей постоянного тока важны рабочий ток и ток останова. Рабочий ток — это среднее значение тока, которое двигатель должен потреблять при обычном крутящем моменте. Ток останова прикладывает достаточный крутящий момент, чтобы двигатель работал на скорости останова или 0 об/мин. Это максимальный ток, который должен потреблять двигатель, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает при напряжении выше номинального, чтобы предотвратить плавление катушек.
Напряжение используется для поддержания протекания чистого тока в одном направлении и для преодоления обратного тока. Чем выше напряжение, тем выше крутящий момент. Номинальное напряжение двигателя постоянного тока указывает наиболее эффективное напряжение во время работы. Обязательно примените рекомендуемое напряжение. Если вы приложите слишком мало вольт, двигатель не будет работать, тогда как слишком много вольт может привести к короткому замыканию обмоток, что приведет к потере мощности или полному разрушению.
Рабочие значения и значения опрокидывания также необходимо учитывать при крутящем моменте. Операционная крутящий момент — это величина крутящего момента, на которую рассчитан двигатель, а крутящий момент при остановке — это величина крутящего момента, создаваемого при подаче питания от скорости останова. Вы всегда должны смотреть на требуемый рабочий крутящий момент, но в некоторых приложениях вам нужно знать, насколько далеко вы можете толкать двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент достаточно велик, чтобы поднять вес робота. В данном случае крутящий момент важнее скорости.
Скорость или скорость (об/мин) могут быть сложными для двигателей. Общее правило заключается в том, что двигатели работают наиболее эффективно на самых высоких скоростях, но это не всегда возможно, если требуется редуктор. Добавление шестерен снизит КПД двигателя, поэтому учитывайте также снижение скорости и крутящего момента.
