

Содержание
6. Плотность транспортного потока
Плотность
транспортного потока
qа
является пространственной характеристикой,
определяющей степень стесненности
движения (загрузки полосы дороги). Ее
измеряют количеством транспортных
средств, приходящихся на 1 км протяженности
полосы дороги.
Предельная
плотность может наблюдаться при
неподвижном состоянии колонны автомобилей,
расположенных вплотную друг к другу на
полосе дороги. Для современных легковых
автомобилей такая предельная величина
составляет около 200 авт/км. Естественно,
что при такой плотности движение
невозможно даже при автоматическом
управлении автомобилями, так как
отсутствует дистанция безопасности.
Поэтому указанная величина плотности
потока имеет чисто теоретическое
значение. Наблюдения показывают, что
для малолитражных легковых автомобилей
при колонном движении с малой скоростью
плотность потока может достигать 100
авт/км, что и следует принимать как
максимально возможную плотность потока
в движении (qаmax).
В практике
проектирования принято считать, что
максимальная плотность равна 100
автомобилей на 1 километр. В зависимости
от дистанции различают следующие виды
движения автомобилей в транспортном
потоке:
При
использовании показателя плотности
потока необходимо учитывать коэффициент
приведения для различных типов
транспортных средств, рассмотренных в
предыдущем параграфе, так как в противном
случае результаты сравнения qа
для различного по составу потока могут
привести к несопоставимым результатам.
Так, если принять, что по дороге движется
колонна автобусов с плотностью 100 авт./км
(возможной, как указано выше, для легковых
автомобилей), то длина такой колонны
вместо километра практически составит
2,0—2,5 км. Если же учесть минимальный из
рекомендуемых Кпр
для автобусов, равный 3, то максимальная
плотность колонны автобусов в физических
единицах может составлять 33 автобуса
на километр, что является реальным.
Чем
меньше плотность потока на полосе
дороги, тем
свободнее
себя чувствуют водители, тем выше
скорость, которую они развивают. Наоборот,
Наоборот,
по мере повышения qа,
т. е. стесненности движения, от водителей
требуется повышение внимательности,
точности действий, а следовательно, и
психического напряжения. Одновременно
увеличивается вероятность ДТП в случае
ошибки, допущенной одним из водителей,
или отказа механизмов автомобиля.
В
зависимости от плотности потока можно
условно подразделить условия движения
по степени стесненности на следующие:
свободное движение, частично связанное
движение, насыщенное движение, колонное
движение, перенасыщенное движение.
Численные
величины qа
в физических единицах транспортных
средств, характерные для каждого из
условий, весьма существенно зависят от
характеристики дороги и, в первую
очередь, от плана и профиля дороги,
скоростей движения и состава потока
транспортных средств на ней.
Лекция 3. Тема 1. Характеристики дорожного движения (продолж.)
План
7 Скорость и темп
движения
7.
 Скорость и темп движения
Скорость и темп движения
Скорость
движения
является важнейшим показателем дорожного
движения, так как характеризует его
целевую функцию. Наиболее объективной
характеристикой скорости транспортного
средства на дороге может служить кривая,
характеризующая ее изменение на
протяжении всего маршрута движения.
Однако
получение таких пространственных
характеристик для множества движущихся
автомобилей является сложным. В практике
организации движения принято
характеризовать скорость движения
транспортных средств мгновенными ее
значениями Va,
зафиксированными в отдельных типичных
точках дороги. Измерителем скорости
доставки грузов и пассажиров является
скорость сообщения Vc,
которая определяется как отношение
расстояния между точками сообщения к
времени нахождения транспортного
средства в пути. Величиной, обратной
скорости сообщения, является темп
движения, который измеряется временем,
затрачиваемым на преодоление единицы
длины пути (мин/км). Этот измеритель
Этот измеритель
весьма удобен для расчетов времени
доставки пассажиров и грузов на различные
расстояния. Мгновенная скорость
транспортного средства и соответственно
скорость сообщения зависят от многих
факторов и подвержены значительным
колебаниям.
Скорость
транспортного средства в пределах его
тяговых возможностей в современном
дорожном движении определяет водитель,
являющийся управляющим звеном в системе
АВД. Водитель постоянно стремится
выбрать наиболее целесообразный режим
скорости, исходя из двух главных
критериев: 1) минимально возможной
затраты времени и 2) обеспечения
безопасности движения. В каждом случае
на принятие решения оказывает влияние
характеристика водителя: его квалификация,
психофизиологическое состояние, цель
движения. Так, исследования, проведенные
в одинаковых дорожных условиях на одном
типе автомобилей, показали, что скорость
движения автомобиля для разных водителей
высокой квалификации может колебаться
в пределах ±10% от среднего значения,
для малоопытных водителей эта разница
намного больше [4].
Рассмотрим
влияние параметров транспортных средств
и дороги на скорость движения. Верхний
предел скорости определяется его
максимальной конструктивной скоростью
Vmax,
которая зависит главным образом от
удельной мощности двигателя. Максимальная
скорость Vmax
современных автомобилей колеблется в
широких пределах в зависимости от их
типа. Она составляет (примерно): 200 км/ч
для легковых автомобилей большого и
среднего класса; 150 — для легковых
автомобилей малого класса; 100 — для
грузовых автомобилей средней
грузоподъемности; 85 — для грузовых
автомобилей большой грузоподъемности
и 75 км/ч — для тяжелых автопоездов. Опыт
показывает, что водитель ведет автомобиль
с максимальной скоростью лишь в
исключительных случаях и кратковременно,
так как это сопряжено с чрезмерно
напряженным режимом работы агрегатов
автомобиля; кроме того, имеющиеся на
дороге даже незначительные подъемы
требуют для поддержания стабильной
скорости запаса мощности. Поэтому даже
при благоприятных дорожных условиях
водитель ведет автомобиль с максимальной
скоростью длительного движения или
крейсерской скоростью.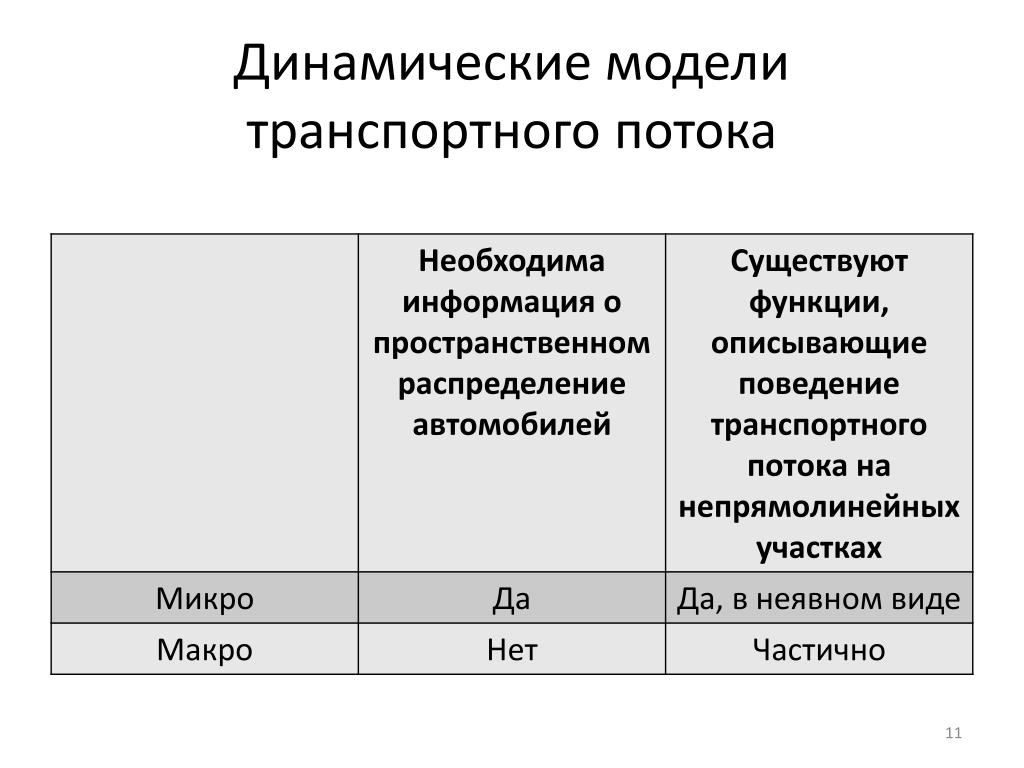 Крейсерская
Крейсерская
скорость для большинства автомобилей
составляет 0,7— 0,85 Vmax.
Таким образом, на прямолинейных и
горизонтальных участках благоустроенных
дорог ожидаемый диапазон мгновенных
скоростей для различных типов современных
автомобилей при их свободном движении
cоставляет
60—160 км/ч.
Однако
реальные дорожные условия вносят
существенные поправки в фактический
диапазон наблюдаемых скоростей движения.
Уклоны, криволинейные участки и неровности
покрытия дороги обычно вызывают снижение
скорости как вследствие большой затраты
мощности и ограниченности динамических
свойств автомобилей, так и в связи с
необходимостью обеспечения устойчивого
движения транспортных средств. Эти
объективные факторы особенно сказываются
на скорости наиболее быстроходных
автомобилей. В связи с этим, фактический
диапазон мгновенных скоростей свободного
движения автомобилей на горизонтальных
участках магистральных улиц и дорог
нашей страны составляет 50— 120 км/ч. Эти
цифры не относятся к дорогам, не имеющим
надлежащего покрытия или с разрушенным
покрытием, где скорость может понизиться
до 10—15 км/ч и даже достичь еще меньшего
значения.
Существенное
влияние на скорость движения оказывают
те элементы дорожных условий, которые
связаны с особенностями психофизиологического
восприятия водителя и уверенностью
управления. Здесь вновь необходимо
подчеркнуть неразрывность элементов
системы АВД и решающее влияние водителей
на характеристики современного дорожного
движения.
Важнейшим
фактором, оказывающим влияние на режимы
движения через восприятие водителя,
являются расстояние видимости Sв
на дороге и ширина полосы движения В.
Под расстоянием видимости понимается
протяженность участка дороги перед
автомобилем, видимого водителем. Величина
Sв
определяет возможность для водителя
заблаговременно оценить условия движения
и прогнозировать обстановку. Обязательным
условием безопасности движения является
превышение величины Sв
над величиной
остановочного пути So
данного
транспортного средства в конкретных
дорожных условиях, т. е. условие Sв>Sо.
При
малой дальности видимости водитель
лишается возможности прогнозировать
обстановку, испытывает неуверенность
и снижает скорость автомобиля. В табл.
В табл.
1 даны примерные величины снижения
скорости движения по сравнению со
скоростью, которая обеспечивается при
дальности видимости 700 м и более.
Таблица
1
Уровень | Тип | Снижение | |||||
100 | 200 | 300 | 400 | 500 | 600 | ||
50 | Грузовые Легковые | 12,2 20,0 | 8,1 13,7 | 4,9 8,6 | 2,8 4,9 | 1,5 2,3 | 0,8 0,4 |
85 | Грузовые Легковые | 13,5 17,5 | 9,8 12,7 | 5,8 8,3 | 3,3 4,9 | 2,0 2,5 | 1,0 0,9 |
95 | Грузовые Легковые | 13,9 19,2 | 9,8 14,6 | 5,9 10,2 | 3,3 6,3 | 2,0 2,5 | 1,0 1,0 |
Ширина
полосы движения, предназначенная для
движения одного ряда автомобилей и
выделенная обычно продольной разметкой,
определяет требования к точности
траектории движения автомобиля. Чем
Чем
меньше ширина полосы, тем более жесткие
требования предъявляются к водителю и
тем больше его психическое напряжение
при обеспечении точного положения
автомобиля на дороге. Поэтому при малой
ширине полосы, а также при встречном
разъезде на узкой дороге водитель
подсознательно снижает скорость.
На
основании исследований получена
зависимость, характеризующая приближенно
связь между скоростью и шириной полосы
дороги:
где
— Вд — ширина полосы, м;
Va
— мгновенная скорость автомобиля, км/ч;
ba
— ширина автомобиля, м;
0,3
— дополнительный зазор, м.
По
аналогии с понятием динамического
габарита длины автомобиля величину Вд
можно назвать динамическим габаритом
ширины транспортного средства Вд
(динамическим
коридором), т.к. для уверенного движения
со скоростью Vа
водитель должен иметь возможность
занимать такую ширину. В этой зависимости
можно также проследить связи комплекса
АВД в дорожном движении. В формуле Вд
В формуле Вд
представляет собой элемент дороги (Д),
ba
— характеристика
автомобиля (элемент A),
коэффициент 0,015 отражает психофизические
свойства водителя и ходовые свойства
автомобиля (система АВ).
Согласно
приведенной зависимости скорость, с
которой уверенно может вести автомобиль
водитель средней квалификации,
ориентировочно составляет при управлении
легковым автомобилем и ширине полосы
3 м — около 65 км/ч, а при ширине полосы
3,5 м — около 90 км/ч, а при управлении
грузовым автомобилем с габаритной
шириной 2,5 м при ширине полосы 3 и 3,5 м —
соответственно 15 и 50 км/ч.
Указанная
зависимость установлена на основании
наблюдений за работой большого числа
водителей. Однако это не исключает того,
что некоторые водители не могут достаточно
точно и своевременно оценить изменение
таких параметров дорожных условий, как
расстояние видимости или ширины полосы
движения и правильно изменить скорость
движения. Поэтому в условиях ограниченной
видимости и малой ширины полосы
движения более часто происходят ДТП.
В
Московском инженерно-строительном
институте на кафедре городского
строительства и в Институте генплана
г. Москвы были разработаны рекомендации
желательных значений ширины полосы
движения (табл. 2). Этих рекомендаций
следует придерживаться при выделении
полос на проезжей части для различных
типов транспортных средств, когда это
позволяет общая ширина дороги.
Таблица
2
Преобладающий | Ширина | ||||
40 | 60 | 80 | 100 | 120 | |
Легковые | 2,8 | 3,0 | 3,2 | 3,4 | 3,6 |
Грузовые | 3,5 | 3,7 | 3,9 | 4,1 | 4,3 |
Крупногабаритные | 3,7 | 3,9 | 4,1 | 4,3 | 4,5 |
Существенное
влияние на фактическую скорость движения
автомобилей оказывают метеорологические
условия, а в темное время суток —
освещение дороги. Таким образом, скорость
Таким образом, скорость
свободного движения в связи с тем, что
на нее влияют многие причины, является
случайной величиной и для потока
однотипных автомобилей характеризуется
обычно нормальным законом распределения
или близким к нему. Для потока разнородных
автомобилей распределение скоростей
свободного движения может иметь
существенные отклонения от нормального
закона. Характерный вид кривых
распределения скоростей показан на
рис. 1
Рис.
1. Кривые распределения мгновенных
скоростей при свободном движении
легковых автомобилей: 1- двухполосная
автомобильная дорога; 2 — четырехполосная
Чем
лучше дорожные и метеорологические
условия, тем больше амплитуды колебаний
скоростей различных типов автомобилей,
обусловленные их скоростными и тормозными
качествами. Скорость сообщения
определяется также частотой остановок,
которые приходится совершать для
пропуска пересекающих потоков транспортных
средств, а также посадки — высадки
пассажиров.
Рассмотренное
выше влияние различных факторов на
скорость движения относится к условиям
свободного движения транспортных
средств, т. е., когда интенсивность и
плотность движения относительно невелики
и не ощущается взаимное стеснение
движения. При повышении интенсивности
и плотности движения возникает стеснение
движения, и скорость потока падает.
Влияние интенсивности движения
транспортного потока на скорость
автомобилей Va
исследовалось многими зарубежными и
отечественными учеными. Выведены
различные корреляционные уравнения
этой зависимости, которые имеют общий
вид:
Vа
== Va.c
(1 — kNa)
где
— Vaс
— скорость свободного движения
автомобиля, км/ч;
k
— корреляционный коэффициент снижения
скорости движения в зависимости от
интенсивности транспортного потока.
Задержки
движения.
Любое снижение скорости движения
транспортных средств по сравнению с
расчетной скоростью для данного участка
дороги, а тем более перерыв в движении
(остановка), приводят к потере времени
и соответственно к экономическим
потерям. Поэтому при организации
Поэтому при организации
дорожного движения особое внимание
должно быть обращено на задержки
движения. К задержкам следует относить
не только все вынужденные остановки
транспортных средств перед перекрестками,
железнодорожными переездами, при заторах
на перегонах, но также и снижение скорости
транспортного потока по сравнению с
расчетной (или разрешенной) для данной
дороги.
Потери времени
при движении транспортного средства
могут быть выражены в общем виде
выражением
где
— Vcф
— фактическая скорость сообщения, км/ч;
Vcp
— расчетная (оптимальная) скорость
сообщения, км/ч;
l1,
l0,
— точки рассматриваемого участка дороги,
км.
При определении
оптимальной скорости движения необходимо
учитывать не только, потери времени, но
и расходы, связанные с потреблением
топлива, износом автомобиля, аварийностью,
которые могут увеличиваться по мере
экономии времени (роста скорости). В
качестве расчетной скорости для городской
магистрали можно принять разрешенный
правилами дорожного движения предел
скорости (например, 60 км/ч). В качестве
В качестве
исходной величины для определения
задержки движения может быть принята
нормативная скорость сообщения или
нормативный темп движения для данного
типа дороги, если таковые будут
установлены. Так, если на дороге
разрешенная скорость равна 60 км/ч, что
соответствует темпу движения 1 мин/км,
а фактическая скорость сообщения,
установленная опытной проверкой,
составляет 30 км/ч, то потеря времени
каждым автомобилем в потоке составляет
1 мин/км. Если длина рассматриваемого
отрезка магистрали равна, например, 5
км, задержка каждого автомобиля составит
5 мин.
Потери
времени для транспортного потока могут
быть определены выражением
T∆
= Na
t∆
T
где
— Na
— интенсивность потока, авт/ч;
t∆
— средняя
задержка одного автомобиля, с;
Т — время наблюдения,
ч.
Величины
задержек транспортных средств на
отдельных узлах или участках улично-дорожной
сети могут быть также оценены коэффициентом
задержки Кз,
характеризующим
степень увеличения фактического времени
нахождения в пути tф
по
сравнению с расчетным tр.
Коэффициент задержки вычисляется по
формуле
Ка=
tф
/
tр.
Задержки
движения в реальных условиях движения
можно разделить на две основные группы:
1) на перегонах дорог и 2) на пересечениях.
Задержки на перегонах могут быть вызваны
маневрирующими или медленно движущимися
транспортными средствами, пешеходным
движением, помехами от стоящих автомобилей,
в том числе при погрузочно-разгрузочных
операциях, а также заторами, связанными
с перенасыщением дороги транспортными
средствами, т. е. плотностью потока выше
оптимальной. Более значительные задержки,
особенно в городах, относятся ко второй
группе. Эти задержки определяются
необходимостью пропуска транспортных
средств или пешеходов по конфликтующим
направлениям на нерегулируемых
перекрестках, простоями при запрещающих
сигналах светофоров. В городах такие
задержки достигают 70% . и даже более от
общей потери времени. Время задержки
определяется не только непосредственно
продолжительностью остановки, но и
потерей времени на замедление движения
перед таким пересечением и на разгон
после остановки.
Решающее значение
для сокращения задержек транспортных
средств в городах имеет оптимизация
регулирования движения на перекрестках,
а также рациональная организация стоянки
автомобилей и остановочных пунктов
маршрутного пассажирского транспорта.
Транспортный поток — Студопедия
Поделись
Транспортный поток состоит из отдельных автомобилей, обладающих различными динамическими характеристиками и управляемых разными по квалификации водителями, т. е. он не является однородным.
В условиях малоинтенсивного движения, когда по дороге движутся отдельные транспортные средства с большими интервалами, водителя в выборе режима движения ограничивают Правила движения, состояние автомобиля и дороги. В плотном транспортном потоке водитель не свободен в выборе скорости движения, он не всегда может сделать обгон и его поведение в значительной степени определяется общим ритмом движения на дороге. Следовательно, интенсивный транспортный поток нивелирует различия в характеристике отдельных водителей и машин.
Наиболее необходимыми и часто применяемыми характеристиками транспортного потока являются интенсивность транспортного потока, его состав по типам транспортных средств, плотность потока, скорость движения, задержки движения. Интенсивность транспортного потока определяется как число транспортных средств, проезжающих через сечение дороги за единицу времени. В качестве расчетного периода времени для определения интенсивности движения принимают год, месяц, сутки, час и более короткие промежутки времени в зависимости от поставленной задачи наблюдения и средств измерения.
На улично-дорожной сети можно выделить отдельные участки и зоны, где движение достигает максимальных размеров, в то время как на других участках оно в несколько раз меньше. Такая пространственная неравномерность отражает, прежде всего, неравномерность размещения грузообразующих и пассажирообразующих пунктов и мест их притяжения. Неравномерность может быть выражена как доля интенсивности движения, приходящейся на данный отрезок времени, либо как отношение наблюдаемой интенсивности к средней за одинаковые промежутки времени.
Эффективность автомобильных перевозок и безопасность дорожного движения в значительной мере определяются характером взаимосвязей в потоке движущихся транспортных средств и основными характеристиками этого потока. Незнание природы таких взаимосвязей ограничивает возможности управления транспортным потоком.
Транспортный поток — это совокупность транспортных средств, движущихся по проезжей части дороги.
В зависимости от числа полос и разрешенных направлений движения транспортный поток подразделяют на следующие виды:
– однополосный односторонний;
– двухполосный односторонний или двусторонний;
– трехполосный односторонний или двусторонний;
– четырехполосный (и более) односторонний или двусторонний.
В зависимости от вида транспортного потока будут различаться возможности для маневрирования, условия движения транспортных средств и другие параметры.
Наиболее востребованными и часто применяемыми характеристиками транспортного потока являются интенсивность, скорость движения, плотность потока, его состав по типам транспортных средств.
Интенсивность движения Na определяется числом транспортных средств (автомобилей), движущихся в определенном направлении или направлениях по данной полосе или дороге и проходящих через пункт наблюдения за фиксированный промежуток времени. Определение интенсивности движения составляет основу оценки состояния транспортного потока.
Интенсивность движения является главным показателем при определении уровня загруженности различных дорог.
При изучении интенсивности движения определяют такой параметр, как неравномерность транспортного потока — его распределение по времени и направлениям.
Интенсивность движения меняется по времени суток (рисунок 2.1), дням недели и месяцам года (рисунок 2.2).
При расчетах обычно пользуются данными об интенсивности движения в часы пик и среднесуточной интенсивности движения за год. При определении эффективности дорожной сети различают два аспекта, один из которых связан с учетом основных характеристик отдельных дорог, а другой — с оценкой эффективности дорожной сети в целом.
Рисунок 2.1 – Изменение интенсивности движения по времени суток
1 – на дороге федерального значения; 2 – на дороге областного значения
Рисунок 2.2 – Примерное изменение интенсивности транспортного потока в течение года.
Постоянный мониторинг интенсивности движения позволяет своевременно планировать работы по изменению организации дорожного движения, модернизации и реконструкции дороги. Данные работы проводятся в соответствии с Руководством по прогнозированию интенсивности движения на автомобильных дорогах которое предназначено для расчета существующей и прогнозирования ожидаемой на соответствующий перспективный период среднегодовой суточной интенсивности движения на участках сети автомобильных дорог общего пользования, дорожной сети городов и т.д.
Интенсивность движения — это непрерывно изменяющаяся величина, даже при очень низкой часовой интенсивности движения могут наблюдаться кратковременные интервалы, за которые через данный пункт будет проходить транспортные средства.
Для двухполосных дорог с движением в обоих направлениях общая интенсивность обычно характеризуется суммарным значением встречных потоков, так как условия движения и, в частности, возможность обгонов определяются загрузкой обеих полос.
Если же дорога имеет разделительную полосу и встречные потоки изолированы друг от друга, суммарная интенсивность встречных направлений не определяет условия движения, а характеризует лишь суммарную работу дороги как сооружения. Для таких дорог имеет значение интенсивность движения в каждом направлении.
При решении различных вопросов регулирования дорожного движения, особенно в городских условиях, большое значение имеет не только суммарная интенсивность потока по данному направлению, но и интенсивность движения, приходящаяся на одну полосу, — так называемая удельная интенсивность движения Ма.
Если известно конкретное распределение интенсивности движения по полосам и оно существенно неравномерно. В качестве расчетной интенсивности Ма можно принять интенсивность движения по наиболее загруженной полосе.
В качестве расчетной интенсивности Ма можно принять интенсивность движения по наиболее загруженной полосе.
Во многих городах дорожная сеть не соответствует возросшей интенсивности движения. На перекрестках возникают заторы, жизнь пешеходов подвергается опасности, оставленные у тротуаров автомобили сильно затрудняют движение транспортных средств.
В оценку уровня загруженности дорог входят следующие взаимосвязанные факторы:
– скорость движения и время, затрачиваемое на поездку;
– непрерывность движения;
– свобода маневрирования;
– безопасность и удобство управления транспортным средством.
Интенсивность движения влияет на все эти факторы, причем с увеличением интенсивности ее отрицательное влияние усиливается. Когда фактическая интенсивность движения по дороге приближается к максимально возможной, увеличивается опасность заторов.
Затор — это качественное понятие, которое связано с количественной характеристикой, называемой плотностью транспортного потока qa.
Плотность транспортного потока является пространственной характеристикой, определяющей степень стесненности движения на полосе дороги. Ее измеряют числом транспортных средств, приходящихся на 1 км протяженности дороги.
Предельная плотность транспортного потока достигается при неподвижном состоянии колонны транспортных средств, расположенных вплотную друг к другу на полосе.
Предельное значение плотности транспортного потока qmах составляет 170 — 200 авт./км в зависимости от состава транспортного потока.
При разных значениях плотности движения могут складываться разные уровни эксплуатационных условий по степени стесненности. В зависимости от плотности транспортного потока движение по степени стесненности подразделяют на свободное, частично связанное, насыщенное и колонное.
Численные значения qa в физических единицах (автомобилях), соответствующих этим состояниям транспортного потока, весьма существенно зависят от параметров дороги, в первую очередь от ее плана и профиля, коэффициента сцепления, а также состава транспортного потока по типам транспортных средств, что, в свою очередь, влияет на выбираемую водителями скорость движения.
Скорость движения υa является важнейшим показателем транспортного потока, так как цель всех мероприятий по организации дорожного движения – обеспечение скорости транспортного потока, наиболее приближенной к максимально возможной из условий безопасности дорожного движения.
В практике организации дорожного движения в зависимости от методов измерения и расчета рассматривают:
— мгновенную скорость движения υa – скорость, фиксируемую в отдельных типичных сечениях (точках) дороги. Именно мгновенная скорость движения в значительной степени влияет на безопасность движения, поскольку определяет кинетическую энергию автомобиля, т. е. его тормозной путь и время, которое имеется у водителя для оценки опасной ситуации;
— максимальную скорость движения υм – наибольшую мгновенную скорость движения, которую может развить транспортное средство. Для дорожного движения большое значение имеет максимальная скорость движения транспортного средства, которая ниже разрешенной.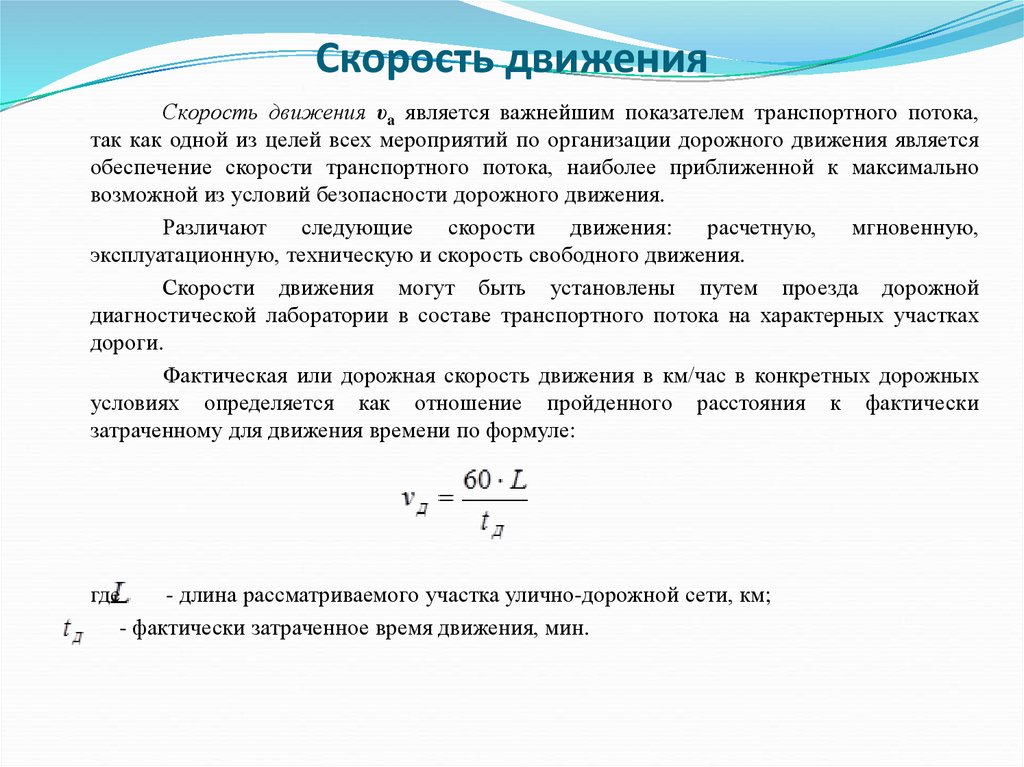 Такие транспортные средства становятся препятствием для нормального движения транспортного потока;
Такие транспортные средства становятся препятствием для нормального движения транспортного потока;
— крейсерскую скорость движения υк – скорость, с которой водитель стремится ехать в данных условиях. Если транспортный поток движется более медленно или более быстро, водитель испытывает дискомфорт. В зависимости от типа личности водитель быстрее ощущает усталость, становится невнимательным или раздражительным;
— разрешенную скорость движения υpaз – скорость, разрешенную на данном участке дороги нормативными документами или средствами регулирования дорожного движения;
— рекомендуемую скорость движения υpeк – скорость, с которой рекомендуется двигаться водителю и которая обеспечивает безопасность дорожного движения в данных условиях;
— безопасную скорость движения υб.д. – скорость, при которой водитель в состоянии предпринять необходимые действия при возникновении опасной ситуации. Соблюдение безопасной скорости движения с большой вероятностью позволяет гарантировать безопасность поездки;
— экономичную скорость движения υэкн – скорость, при которой затраты на движение (в основном расход топлива) минимальны;
— скорость сообщения υс – скорость, которая является измерителем времени доставки пассажиров и грузов. Скорость сообщения определяется как отношение расстояния между точками сообщения ко времени нахождения транспортного средства в пути (времени сообщения). Этот же показатель применяется для характеристики скорости движения по отдельным участкам дорог.
Скорость сообщения определяется как отношение расстояния между точками сообщения ко времени нахождения транспортного средства в пути (времени сообщения). Этот же показатель применяется для характеристики скорости движения по отдельным участкам дорог.
Между параметрами транспортного потока существуют определенные зависимости. Характер этих зависимостей достаточно сложный, на них влияет громадное количество факторов, связанных не только непосредственно с транспортным потоком, но и с условиями его движения по дороге, метеоусловиями, временем года и суток и т. п. При исследовании транспортных потоков влияющие на них факторы могут рассматриваться как детерминированные или как вероятностные величины.
Вероятностный подход более близок природе транспортного потока, но сложен для математического описания. Детерминированный подход легче реализовать в инженерных методиках, и при тщательном анализе исходных данных он дает достаточно точные для практики результаты.
При исследовании транспортных потоков используют два подхода.
Первый предполагает исследование процессов, происходящих внутри потока, поэтому он получил название микроскопическое моделирование. Микроскопическое моделирование рассматривает транспортный поток как взаимное положение следующих друг за другом автомобилей и основано на теории следования за лидером. Предполагается, что основное влияние на изменение параметров движения конкретного автомобиля (ведомого) оказывает изменение скорости движения находящегося перед ним автомобиля-лидера.
Исследования показали, что влияние на изменение скорости ведомого автомобиля начинается, когда временной интервал между ним и ведомым автомобилем составляет в городских условиях — 6 сек, вне населенных пунктов — 9 сек.
Второй подход к изучению транспортных потоков рассматривает его как целостный процесс, характеризуемый только внешними параметрами. При таком подходе создаются макроскопические модели, которые рассматривают такие характеристики транспортного потока как скорость, интенсивность, плотность движения и т. п.
п.
Между скоростью движения, плотностью и интенсивностью движения существует соотношение Na = υа qa, (2.1) которое графически может быть изображено в виде так называемой основной диаграммы транспортного потока (рисунок 2.3).
Рисунок 2.3 – Основная диаграмма транспортного потока
Диаграмма отражает изменение состояния однорядного транспортного потока в зависимости от увеличения его интенсивности и плотности. Левая часть кривой (показана сплошной линией) отражает устойчивое состояние транспортного потока, при котором по мере увеличения плотности транспортный поток проходит фазы свободного, затем частично связанного и связанного движения, достигая точки максимально возможной интенсивности — пропускной способности (точка Na max= Pa).
В процессе этих изменений скорость транспортного потока падает — она характеризуется тангенсом угла наклона α радиуса-вектора, проведенного от точки 0 к любой точке кривой, характеризующей изменение Na.
Соответствующие точке Na max = Pa значения плотности и скорости транспортного потока считаются оптимальными по пропускной способности (qa opt и υa opt). При дальнейшем росте плотности (за точкой Ра перегиба кривой) транспортный поток становится неустойчивым (эта ветвь кривой показана штриховой линией).
Переход транспортного потока в неустойчивое состояние происходит вследствие снижения плавности движения, например при появлении препятствия на участке дороги, неблагоприятных метеоусловиях и т. п. Снижение скорости движения автомобилем – лидером группы требует торможения разной интенсивности последующих автомобилей, а затем и разгонов, что создает пульсирующий, неустойчивый поток.
п. Снижение скорости движения автомобилем – лидером группы требует торможения разной интенсивности последующих автомобилей, а затем и разгонов, что создает пульсирующий, неустойчивый поток.
Резкое торможение транспортного потока (находящегося в режиме, соответствующем точке А) и переход его в результате торможений к состоянию по скорости и плотности в положение, соответствующее, например, точке В, вызывает так называемую «ударную волну» (показана тонкой штриховой линией АВ), распространяющуюся навстречу направлению транспортного потока со скоростью, характеризуемой тангенсом угла β.
«Ударная волна» является, в частности, источником возникновения попутных цепных столкновений, типичных для плотных транспортных потоков.
В точках 0 и qmax интенсивность движения Na = 0, т. е. соответственно на дороге транспортные средства отсутствуют или транспортный поток находится в состоянии затора (неподвижности).
е. соответственно на дороге транспортные средства отсутствуют или транспортный поток находится в состоянии затора (неподвижности).
Радиус-вектор, проведенный из точки 0 в направлении любой точки на кривой (например, Аили В), характеризующей Na, определяет значение средней скорости потока
(2.2)
Плотность транспортного потока рассматривается как зависимая переменная, поскольку две другие (интенсивность и скорость движения) являются измеряемыми и независимыми переменными.
Еще одним важным параметром, характеризующим транспортный поток, является наличие в его составе транспортных средств различного типа — состав транспортного потока. Состав транспортного потока влияет на загрузку дорог (стесненность движения), что объясняется, прежде всего, существенной разницей в габаритных размерах автомобилей: от длины 4…5 м для легковых автомобилей, до длины 24 м, характерной для автопоездов. Необходимо учитывать и различие в динамических характеристиках автомобилей различного типа.
Необходимо учитывать и различие в динамических характеристиках автомобилей различного типа.
Оценка состава транспортного потока осуществляется по процентному составу или доле транспортных средств различных типов.
Знание состава транспортного потока позволяет учесть степень занятости дороги движущимся автомобилем, выражением которой является динамическая площадь автомобиля Sa.
Этот показатель характеризует сложность обгона данного автомобиля другим.
Низкие значения Sa незначительно влияют на безопасность движения, а высокие вызывают ее снижение. Динамическая площадь определяется как произведение длины автомобиля lа на динамический габарит Ga.
(2.3)
(2.4)
где Bа − ширина автомобиля, м;
Ка − ширина колеи (по центрам колес), м;
0,5 − запас для обеспечения разъезда по 0,25 м на сторону.
Для учета в фактическом составе транспортного потока влияния различных типов транспортных средств на загрузку дороги применяют коэффициенты приведения kпрi к условному легковому автомобилю, значения которых представлены в таблице 2.1.
Таблица 2.1 – Значения коэффициентов приведения kпрi, по СНиП 2.05.02-85
| Транспортные средства | Тип рельефа | ||
| Равнинный | Пересеченный | Горный | |
| Легковые автомобили | |||
| Грузовые автомобили грузоподъемностью, т: | |||
| 1,5 | 1,8 | 2,25 | |
| 2,4 | |||
| 2,5 | 3,75 | ||
| 3,6 | 4,5 | ||
| более 14 | 3,5 | 4,2 | 5,25 |
| Автопоезда грузоподъемностью, т: | |||
| 3,5 | 4,2 | 5,25 | |
| 4,8 | |||
| 7,5 | |||
| Более 30 | 7,2 |
Приведенная интенсивность движения вычисляется как сумма произведений частных показателей интенсивности движения транс портных средств каждого типа, умноженная на соответствующие коэффициенты приведения:
(2. 5)
5)
где Ni − интенсивность движения транспортных средств данного типа;
kпрi − соответствующие коэффициенты приведения для данной группы транспортных средств;
т − число типов транспортных средств, на которые разделены данные наблюдений.
Исследования показывают, что используемые коэффициенты приведения являются приближенными или завышенными. Основная причина некорректности состоит в определении kпрi как функции грузоподъемности.
В действительности грузоподъемность не имеет прямого отношения к динамике автомобиля. Этот вывод тем более справедлив для современных более динамичных, скоростных транспортных средств. Автомобиль с высокими динамическими характеристиками независимо от грузоподъемности создает меньше помех движению и способствует повышению пропускной способности дороги.
Корректная оценка динамики автомобилей в транспортном потоке позволяет повысить достоверность расчета пропускной способности дороги.
Калькулятор плотности трафика
Калькулятор плотности трафика поможет вам проанализировать трафик на любой дороге. Благодаря этому инструменту вы сможете оценить поток и плотность трафика, а также узнать среднюю скорость движения. Кроме того, вы также сможете оценить среднее расстояние между двумя последовательными автомобилями на дороге.
Продолжайте читать, чтобы узнать, как рассчитать плотность и поток трафика, или взгляните на наш калькулятор миль на галлон!
Какой поток трафика?
Транспортный поток определяется как количество транспортных средств, проезжающих через точку в заданный период времени. Обычно мы выражаем это значение в виде почасовой ставки — например, вы можете наблюдать поток 500 автомобилей в час на шоссе.
Транспортный поток обычно измеряют, наблюдая за дорогой и отмечая количество проезжающих мимо автомобилей. Чтобы преобразовать это число в почасовую ставку, необходимо использовать следующее уравнение:
flow=nt\mathrm{flow} = \frac{n}{t}flow=tn
, где nnn — количество транспортных средств, которые пройдено точкой за период времени ttt.
Поток равен нулю в двух случаях — либо когда нет движения (нет машин на дороге), либо когда все машины стоят в пробке и не могут двигаться вперед.
Формула плотности движения
Плотность движения является второй фундаментальной характеристикой любой дороги. Он говорит о том, насколько значителен скопление автомобилей на дороге. Если плотность достигает своего максимума, поток падает до нуля, образуя пробку.
Мы рассчитываем плотность как количество транспортных средств mmm, занимающих участок дороги длиной LLL. Чтобы вычислить его, просто разделите эти два значения:
плотность=мл\mathrm{плотность} = \frac{м}{L}плотность=Lм .
Как рассчитать среднюю скорость движения
Два приведенных выше значения — расход и плотность — напрямую связаны со средней скоростью движения. Эти три называются фундаментальными характеристиками транспортного потока, и следующая формула связывает их.
поток=скорость×плотность\mathrm{поток} = \mathrm{скорость} × \mathrm{плотность}поток=скорость×плотность
Это фундаментальное уравнение дает вам самую основную информацию о движении на любой дороге.
Чтобы рассчитать скорость движения с помощью этого калькулятора плотности движения, выполните следующие действия:
- Измерьте, сколько транспортных средств проезжает одну точку за заданный период времени. Можно предположить, что за две минуты мимо вас проехало 20 машин. Это означает, что поток трафика равен
поток = 202 = 10 vehmin = 600 vehh \ mathrm {flow} = \ frac {20} {2} = 10 \ \ frac {\ mathrm {veh}} {min} = 600 \ \ frac {\ mathrm {veh }}{h}flow=220=10 minveh=600 hveh
- Подсчитайте, сколько транспортных средств одновременно занимают сегмент дороги. Допустим, на отрезке длиной 200 м вы заметили две машины. Плотность трафика равна
плотность = 2200 = 0,01 vehm = 10 vehkm \ mathrm {плотность} = \ frac {2} {200} = 0,01 \ \ frac {\ mathrm {veh}} {m} = 10 \ \ frac {\ mathrm {veh }}{км}плотность=2002=0,01 мве·ч=10 кмве·ч
- Теперь вы можете рассчитать интервал между автомобилями как обратную величину плотности:
headway=110km=100m\mathrm{headway} = \frac{1}{10}km = 100 mheadway=101km=100m скорость:
поток=скорость×плотностьскорость=flowdensityspeed=60010=60 км/ч\mathrm{поток} = \mathrm{скорость} × \mathrm{плотность}
\\\mathrm{скорость} = \frac{\mathrm{поток}}{\mathrm{плотность}}
\\\mathrm{скорость} = \frac{600}{10} = 60\frac{km}{h}flow=speed×densityspeed=densityflowspeed=10600=60hkm
- Средняя скорость движения по этой дороге составляет 60 км/ч.
Обязательно загляните и в наш газовый калькулятор!
Содержание Рисунок 4-1. INFORM (Лонг-Айленд, Нью-Йорк) Центр управления. 4.1 Введение Автострада — это автомагистраль с ограниченным доступом с высокими скоростями и пандусами для въезда и выезда. Автострады могут быть платными, а могут и не быть. Первоначально автострады предназначались для обеспечения беспрепятственного, высокоскоростного движения транспорта на большие расстояния. Очень мало внимания уделялось управлению заторами, потому что никогда не ожидалось, что автострады будут перегружены. Однако по мере того, как города росли, а жители пригородной зоны переезжали в пригороды, автомагистрали начали смешивать дальнее движение с пригородным движением, и заторы, которые ранее затрагивали наземные улицы, теперь также затрагивали автомагистрали. В этой главе представлен краткий обзор управления автострадами. Для получения дополнительной информации см. Справочник по управлению и эксплуатации автомагистралей (1). Основными целями системы управления автострадами являются:
4.2 Заторы Заторы возникают на автомагистралях, когда спрос превышает пропускную способность.
Чтобы понять, что вызывает заторы на автомагистралях, необходимо понять теорию транспортных потоков, изложенную ниже. К важным параметрам транспортного потока относятся:
D = V / S Принципиальная диаграмма, показанная на рис. 4-2, связывает расход и плотность. Эта диаграмма сильно идеализирована, и фактические характеристики транспортных потоков значительно различаются. Рис. 4-2. Обобщенные зависимости между скоростью, плотностью и расходом на объектах с непрерывным потоком. Скорость свободного потока (Sf) возникает в условиях слабого движения. Когда плотность достигает критической плотности (D0), автострада достигает своего максимального потока (Vm). Скорость в этот момент снижается до S0. Когда плотность превышает критическую плотность, поток фактически уменьшается, пока плотность не достигнет плотности пробки (Dj), при которой поток становится равным нулю и все движение останавливается. Когда плотность ниже критической плотности, говорят, что поток стабилен или не перегружен. Когда плотность превышает критическую плотность, говорят, что поток перегружен или нестабилен, и пропускная способность автомагистрали уменьшается. Поскольку при стабильном потоке обрабатывается больше транспортных средств, лучше всего, чтобы плотность была как можно ближе к критическому значению, но ниже его, чтобы автострада могла работать на полную мощность. Заторы стали повседневным явлением на многих участках городских сетей автомагистралей. Даже случайные наблюдатели могут обнаружить точки ожидаемого скопления. Перегрузка, обычно ожидаемая в предсказуемых местах в течение приблизительно предсказуемых периодов времени, называется периодической перегрузкой. Напротив, другие формы перегрузок возникают в результате случайных или менее предсказуемых событий. Такие неповторяющиеся заторы чаще всего возникают в результате инцидентов. Перегрузка из-за особых событий (например, спортивных мероприятий, работ по техническому обслуживанию и строительству) может считаться единовременной перегрузкой. Для измерения заторов исследователи из Техасского транспортного института разработали индекс заторов на дорогах (RCI), представленный следующим образом (3):
Если пользователи ожидают определенного уровня загруженности в периоды пиковой нагрузки, они могут соответствующим образом планировать поездки. 4.3 Формы управления автострадамиУправление автострадами включает категории, показанные на рис. 4-3. Рис. 4-3. Категории управления автострадами. Эти темы описаны ниже и подробно рассмотрены в Ссылке 1.
Рис. 4-4. CMS на автостраде. 4.4 Взаимосвязь между автострадами и наземными улицамиВ последние годы, поскольку и автострады, и наземные улицы становятся все более загруженными, становится все более важным улучшить координацию между автострадами и наземными улицами. Например, при измерении на пандусе часть транспортных средств может избегать автострады, что приводит к увеличению трафика на наземной улице. Вот несколько способов учета наземных улиц при управлении автострадами:
|
 Когда это происходит на участке автомагистрали, существует узкое место. Узкое место возникает, когда:
Когда это происходит на участке автомагистрали, существует узкое место. Узкое место возникает, когда: Примеры типичных характеристик потока приведены в HCM 2000 (2).
Примеры типичных характеристик потока приведены в HCM 2000 (2).
 Тем не менее, непериодические заторы могут серьезно повлиять на удовлетворительную поездку в пиковые или непиковые периоды. Неспособность обеспечить надежный, хотя иногда и более низкий уровень обслуживания может оказаться более серьезной проблемой.
Тем не менее, непериодические заторы могут серьезно повлиять на удовлетворительную поездку в пиковые или непиковые периоды. Неспособность обеспечить надежный, хотя иногда и более низкий уровень обслуживания может оказаться более серьезной проблемой.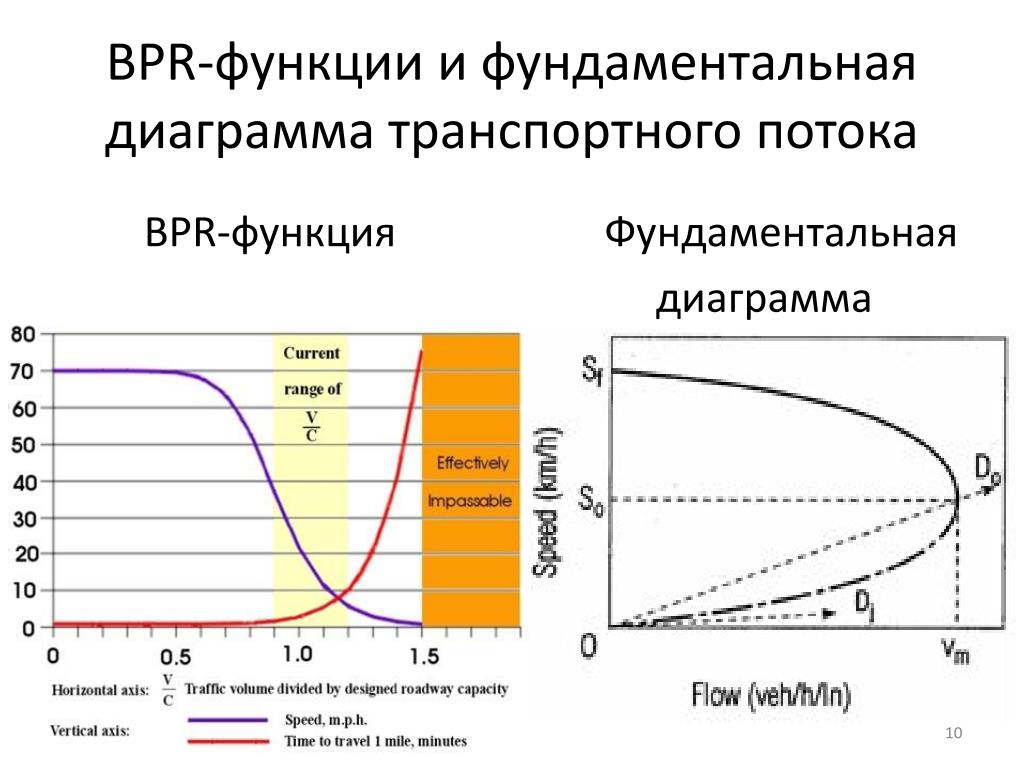
 Может быть предоставлена информация об инцидентах, неблагоприятных погодных условиях и условиях вождения, информация о скорости и времени в пути, строительных и ремонтных работах, запланированном месте проведения специального мероприятия, специальных мерах по контролю полосы движения и проезжей части, а также информация об альтернативных маршрутах. Методы, используемые для распространения информации, включают интернет-услуги, радиоинформацию, автомобильные навигационные устройства, сменные знаки сообщений (CMS) и радио с рекомендациями на дорогах (HAR). На рис. 4-4 показан пример CMS на автостраде.
Может быть предоставлена информация об инцидентах, неблагоприятных погодных условиях и условиях вождения, информация о скорости и времени в пути, строительных и ремонтных работах, запланированном месте проведения специального мероприятия, специальных мерах по контролю полосы движения и проезжей части, а также информация об альтернативных маршрутах. Методы, используемые для распространения информации, включают интернет-услуги, радиоинформацию, автомобильные навигационные устройства, сменные знаки сообщений (CMS) и радио с рекомендациями на дорогах (HAR). На рис. 4-4 показан пример CMS на автостраде. Управление инцидентами требует координации между различными агентствами, а также координации между различными человеческими и техническими ресурсами.
Управление инцидентами требует координации между различными агентствами, а также координации между различными человеческими и техническими ресурсами.
