Содержание
5.4. Регулируемый электропривод с обратными связями по току и скорости и суммирующим усилителем
Регулируемый
электропривод с отрицательной обратной
связью по скорости.
Для получения достаточно большого
диапазона регулирования скорости
необходимо повышать жесткость механических
характеристик и вводить в систему
электропривода отрицательную обратную
связь по скорости. Наличие главной
обратной связи по скорости является
наиболее характерной чертой электропривода
с большим диапазоном регулирования
скорости.
Схема
регулируемого электропривода
представлена на рис. 14.11. Двигатель М
получает питание от силового преобразователя
U.
Скорость двигателя регулируется вниз
от номинальной посредством изменения
напряжения якоря Uя.
На
валу двигателя установлен тахогенератор
BR,
напряжение которого поступает на
регулятор скорости AR,
который может работать в качестве П–
или ПИ–регулятора.
Структурная
схема регулируемого электропривода
представлена на рис. 14.12. Пунктиром
показана обратная связь, которая в этом
варианте привода не используется.
Рис.
14.11. Схема регулируемого электропривода
с
обратной связью по скорости
Рис.
14.12. Структурная схема регулируемого
электропривода с обратной связью по
скорости (цепь обратной связи по току
показана пунктиром)
Составим
уравнение, описывающее динамические
процессы в приводе. Скорость двигателя
постоянного тока зависит от напряжения
якоря и момента сопротивления
.
На
этом основании для разомкнутой цепи
регулируемого ЭП и
,
но
напряжение Uoc
связано со скоростью двигателя .
Подставив
это значение в предыдущую формулу и
решив ее относительно скорости, будем
иметь
Регулируемый
электропривод с обратной связью по
скорости и току якоря.
Кроме основной обратной связи по скорости
в регулируемом электроприводе используют
обратную связь по току якоря. Ток якоря
пропорционален моменту, поэтому, управляя
током, мы по сути дела управляем моментом
ЭД и формируем силовое воздействие на
механическую систему. Можно считать,
что обратная связь по скорости определяет
точность регулируемого электропривода,
а обратная связь по току – его
быстродействие.
Схема
регулируемого электропривода с обратными
связями по скорости и току представлена
на рис. 14.13. Во многом эта схема совпадает
со схемой, изображенной на рис. 14.11.
Отличие заключается в том, что в цепи
якоря установлен датчик тока ВА,
сигнал которого поступает на регулятор
А.
В регуляторе (суммирующем усилителе)
происходит алгебраическое суммирование
задающего сигнала и сигналов обратной
связи по току и скорости.
Воспользуемся
структурной схемой, приведенной на рис.
14.13. с учетом пунктирной линии, образующей
обратную связь по току.
Рис.
14.13. Схема регулируемого электропривода
с обратными связями
по
скорости и току
Регулируемый
электропривод с обратной связью по
скорости и по току с отсечкой.
В электроприводе станков и ПР широко
применяют системы привода, в которых
действует отрицательная обратная связь
по току с отсечкой. Нелинейная обратная
связь по току (рис. 4.22, а) действует
следующим образом: до тех пор, пока ток
якоря не превышает величины тока отсечки
,
сигнал обратной связи равен нулю. Если
же ,
то вводится в действие сильная
отрицательная обратная связь по току,
которая ограничивает величину тока
якоря на заданном уровне.
При
постоянном магнитном потоке ограничение
тока якоря эквивалентно ограничению
момента. Поэтому механическая
характеристика такого привода состоит
из двух участков (рис. 14.14, б).
Рис.
14.14. Схема (а) и механическая характеристика
(б)
электропривода
с отсечкой по току
На
первом участке в приводе действует
только отрицательная обратная связь
по скорости и жесткость механических
характеристик велика. При больших
моментах «срабатывает» отсечка по току
и добавляется сильная отрицательная
обратная связь по току, которая уменьшает
выходное напряжение преобразователя
и снижает жесткость механических
характеристик. Наклон механических
характеристик на втором участке резко
увеличивается. Такие характеристики
называют экскаваторными. Привод с
отсечкой по току может работать на
жесткий упор при
= 0. Ток якоря при нулевой скорости привода
называют током стопорения.
В
схемах отсечки по току (рис. 4.23, а)
напряжение, снимаемое с шунта, включенного
в цепь якоря двигателя ,
сравнивается с опорным напряжением
uоп,
пропорциональным току отсечки.
Рис.
14.15. Схемы отсечки по току: а – с диодом
в качестве порогового элемента; б – со
стабилитроном; в, г – с упреждающим
токоограниченнем
Опорное
напряжение запирает диод VD.
В результате ток в цепи может протекать
только при .
Этот ток создает падение напряжения на
резисторе R,
которое и является напряжением обратной
связи. Величину тока отсечки регулируют
путем изменения опорного напряжения.
В
схеме на рис. 4.23, б отсечка по току
осуществляется с помощью стабилитрона
V. При напряжении
происходит пробой стабилитрона и на
нагрузочном сопротивлении возникает
напряжение обратной связи.
Отсечка
по току позволяет стабилизировать
момент двигателя не только в статическом
режиме при работе на упор, но и в
динамическом режиме. Переходные процессы
в таком приводе происходят с почти
постоянным динамическим моментом. В
приводах с малоинерционными тиристорными
преобразователями токоограничение
имеет особенно важное значение.
Замкнутые системы привода двигателя по скорости, току
Похожие презентации:
3D печать и 3D принтер
Видеокарта. Виды видеокарт
Анализ компании Apple
Трансформаторы тока и напряжения
Транзисторы
Устройство стиральной машины LG. Электрика
Конструкции распределительных устройств. (Лекция 15)
Электробезопасность. Правила технической эксплуатации электроустановок
Магнитные пускатели и контакторы
Работа на радиостанциях КВ и УКВ диапазонов. Антенны военных радиостанций. (Тема 5.1)
Замкнутая система П — Д с
отрицательной обратной
связью по скорости
двигателя постоянного
тока независимого
возбуждения
Основу данной системы составляет
разомкнутая схема П — Д.
На валу ДПТНВ находится датчик
скорости — тахогенератор ТГ, выходное
напряжение
которого
UTГ=γω
пропорционально скорости ДПТ и является
сигналом обратной связи.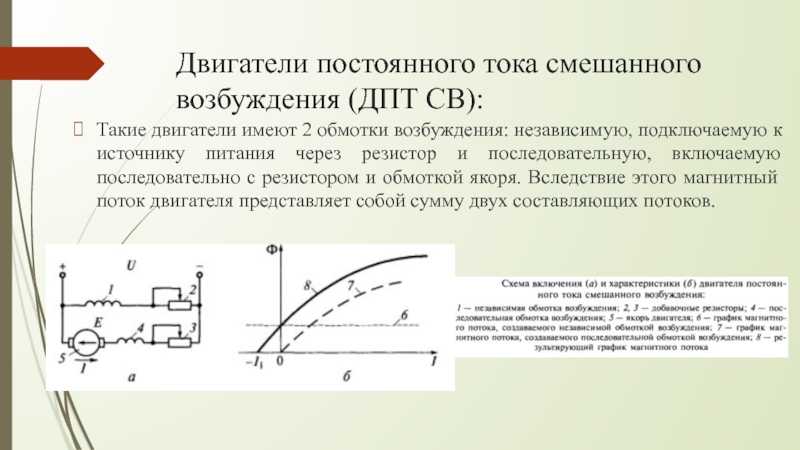
Коэффициент пропорциональности γ
называется
коэффициентом
обратной
связи по скорости и может регулироваться
за счет изменения тока возбуждения
тахогенератора Iвтг.
Сигнал обратной связи UTГ =γω = Uoc
сравнивается с задающим сигналом
скорости Uзс, и их разность в виде
сигнала рассогласования (ошибки)
Uвх
подается
на
вход
дополнительного
усилителя
У,
который
с
коэффициентом
Ку
усиливает сигнал рассогласования
Uвх и подает его в виде сигнала
управления
Uу
на
вход
преобразователя П.
Рассмотрим
физическую
сторону
процесса
регулирования скорости в данной системе.
Предположим, что ДПТ работает под нагрузкой в
установившемся режиме и по каким-то причинам
увеличился момент нагрузки Мс. Так как развиваемый
ДПТ момент становится меньше момента нагрузки, его
скорость начинает снижаться и соответственно будет
снижаться сигнал обратной связи по скорости, что в свою
очередь вызовет увеличение сигналов рассогласования
и управления и приведет к повышению ЭДС
преобразователя, а следовательно, напряжения и
скорости ДПТ.
При уменьшении момента нагрузки обратная связь
будет действовать в другом направлении, приводя к
снижению ЭДС преобразователя.
Таким образом, благодаря наличию
обратной
связи
осуществляется
автоматическое
регулирование
ЭДС
преобразователя, а значит, и подводимого
к ДПТ напряжения, за счет чего
повышается жесткость характеристик ЭП.
В разомкнутой же системе при
изменении
момента
нагрузки
ЭДС
преобразователя
не
изменяется,
в
результате чего жесткость характеристик
электропривода меньше.
Уравнения механической характеристики в
разомкнутой и замкнутой по скорости
системах имеет вид:
U М R
кФ (кФ ) 2
K з U зс
М ( Rя Rп )
2
1 K з (кФ) (1 K з )
где Uзс – задающее напряжение; принимается
максимальное значение Uзс = 15 – 20 В
U ос
— коэффициент передачи обратной связи
по скорости;
K с — коэффициент передачи всей
Kз
кФ системы;
Kс Kу Kп
— коэффициент усиления
усилителя и
преобразователя
Статическое
падение
скорости
естественной характеристике
ст
на
М Rдв
o
U кФ
Статическое падение скорости в замкнутой
системе
ст
М (Rдв Rпр )
o
Uзс кФ Кс
Коэффициент
передачи
системы,
обеспечивающий при данном Uзс скорость
холостого хода, как и в разомкнутой
системе.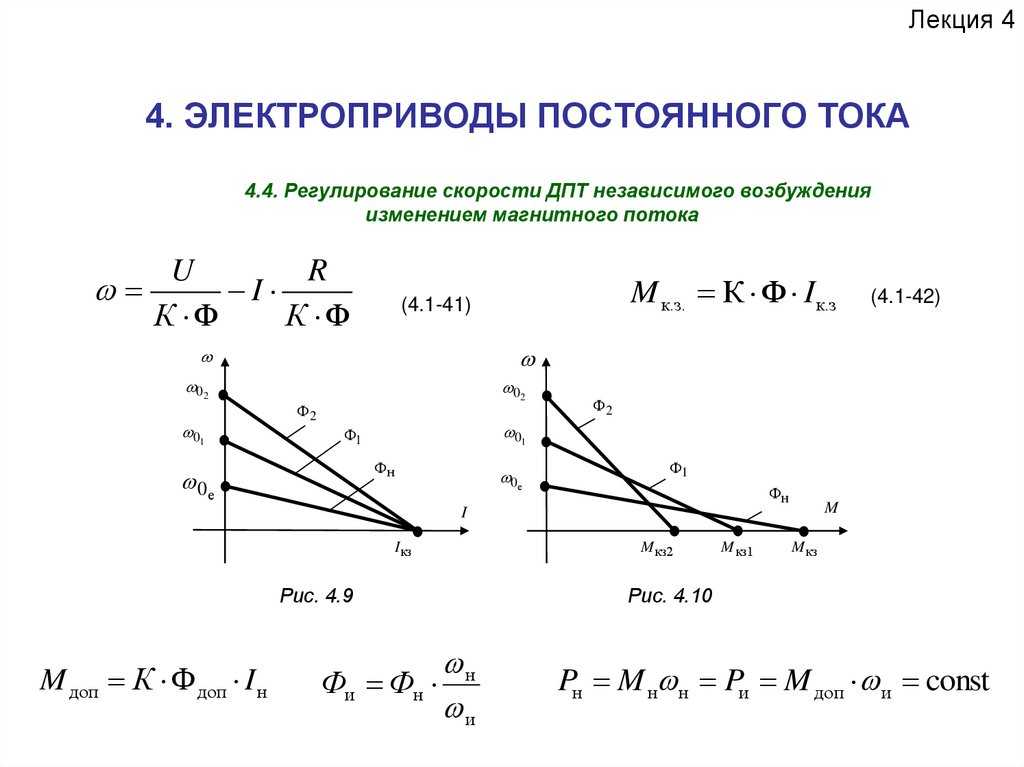
Kз
1
U зс
0
Замкнутая
система
с
отрицательной обратной связью
по напряжению предназначена
для стабилизации напряжения.
Датчиком
является
потенциометр,
включенный
параллельно якорю.
Регулирование (ограничение)
тока и момента двигателя
постоянного тока с помощью
нелинейной отрицательной
обратной связи по току
В качестве датчика тока в этой
системе
ЭП
используется
шунт
с
сопротивлением Rш, падение напряжения
на котором пропорционально току якоря. В
результате сигнал обратной связи по току
Uот = βI,
где β — коэффициент обратной связи по
току.
Отметим, что в качестве резистора
Rш
часто
используется
обмотка
дополнительных
полюсов
или
компенсационная обмотка двигателя.
Сигнал обратной связи Uот поступает
на узел токоограничения УТО, называемый
также узлом токовой отсечки, вместе с
сигналом
задания
тока
Uзт,
определяющим уровень тока отсечки Iотс,
с которого начинается регулирование
(ограничение) тока.
Работа УТО в соответствии с его
характеристикой Uот(I) происходит следующим
образом.
При токе в якоре меньше заданного тока
отсечки, т.е. пока I < Iотс, сигнал обратной связи
на выходе УТО равен нулю. Другими словами,
ЭП в диапазоне тока якоря от 0 до Iотс является
разомкнутым
и
имеет
характеристики,
изображенные в зоне I.
При I > Iотс на выходе УТО появляется
сигнал отрицательной обратной связи Uот = βI,
ЭП становится замкнутым и начинает работать в
соответствии с характеристиками в зоне II.
Замкнутая схема
электрического привода с
двигателями постоянного
тока с обратными связями
по скорости и току
Для получения жестких характеристик ЭП,
необходимых для регулирования скорости, и
мягких
характеристик,
требуемых
для
ограничения тока и момента, т. е. при
регулировании двух координат, применяются
соответствующие обратные связи.
В схеме ЭП с нелинейными обратными
связями по скорости и току для обеспечения
нелинейности
цепей
обратных
связей
используются узел токоограничения УТО и узел
ограничения скорости УСО, характеристики
которых показаны внутри соответствующих
условных изображений.
Приведенная схема соответствует
схеме
с
общим
усилителем
и
нелинейными
обратными
связями,
которые определяют разделение области
механических характеристик на три зоны I, II и III.
В зоне I в диапазоне токов от 0 до
Iотс действует только обратная связь по
скорости,
обеспечивая
жесткие
характеристики ЭП.
В зоне II при I > Iотс вступает в
действие обратная связь по току и
характеристики становятся мягче.
При дальнейшем увеличении тока и
падении скорости ниже скорости отсечки
ωотс перестает действовать обратная
связь по скорости, а за счет действия
связи по току характеристики становятся
еще мягче (зона III), т.е. обеспечивается
требуемое ограничение тока и момента.
English
Русский
Правила
Методы управления приводом: постоянный ток (двигатели и приводы)
Как указывалось ранее, обычно используются методы управления скоростью с разомкнутым и замкнутым контуром. Если регулирование скорости не является фактором, то двигатель постоянного тока может работать в режиме управления без обратной связи. Тем не менее, большинство приложений требуют определенного типа регулирования для наиболее эффективного использования механики системы. Таким образом, средства отправки приводу фактического сигнала скорости необходимы для регулирования скорости. В приводах постоянного тока в основном используются две формы управления с обратной связью — обратная связь по тахометру и обратная связь по напряжению якоря (управление ЭДС). Хотя обратная связь по напряжению якоря не использует внешнее устройство, она называется обратной связью и может рассматриваться как форма управления с обратной связью.
Если регулирование скорости не является фактором, то двигатель постоянного тока может работать в режиме управления без обратной связи. Тем не менее, большинство приложений требуют определенного типа регулирования для наиболее эффективного использования механики системы. Таким образом, средства отправки приводу фактического сигнала скорости необходимы для регулирования скорости. В приводах постоянного тока в основном используются две формы управления с обратной связью — обратная связь по тахометру и обратная связь по напряжению якоря (управление ЭДС). Хотя обратная связь по напряжению якоря не использует внешнее устройство, она называется обратной связью и может рассматриваться как форма управления с обратной связью.
Обратная связь по напряжению якоря (управление ЭДС, регулирование скорости)
На рис. 5-13 показана схема управления обратной связью по напряжению якоря.
Рисунок 5-13. Обратная связь по напряжению якоря (управление ЭДС)
Как показано на рис.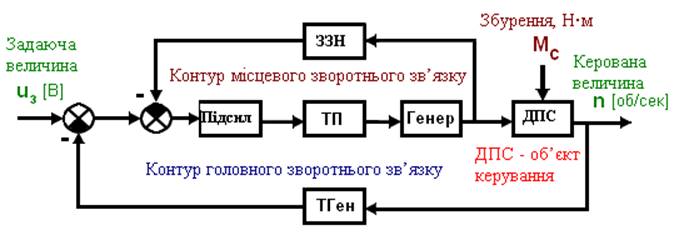 5-13, приводу требуется опорный сигнал скорости и сигнал обратной связи противоположной полярности. Обратная связь используется для балансировки управления при достижении желаемой выходной скорости. Все системы управления приводом находятся внутри пунктирных линий.
5-13, приводу требуется опорный сигнал скорости и сигнал обратной связи противоположной полярности. Обратная связь используется для балансировки управления при достижении желаемой выходной скорости. Все системы управления приводом находятся внутри пунктирных линий.
Задание скорости отправляется в схему суммирования. Измеряя напряжение якоря на выходе привода, привод может определить CEMF (противодействующую электродвижущую силу) двигателя. Этот сигнал CEMF (отрицательная полярность) отправляется
в качестве обратной связи в схему суммирования. Когда ошибка равна нулю, привод стабилизируется на желаемой скорости.
Еще одна суммирующая цепь расположена после усилителя скорости и перед усилителем тока. Эта суммирующая схема будет использовать шунт или другое устройство для измерения тока якоря. Отрицательная обратная связь по току направляется в схему суммирования, а результирующий сигнал используется для ограничения величины выходного тока. Если текущий уровень находится в допустимых пределах, то контроль будет осуществляться по сигналу скорости.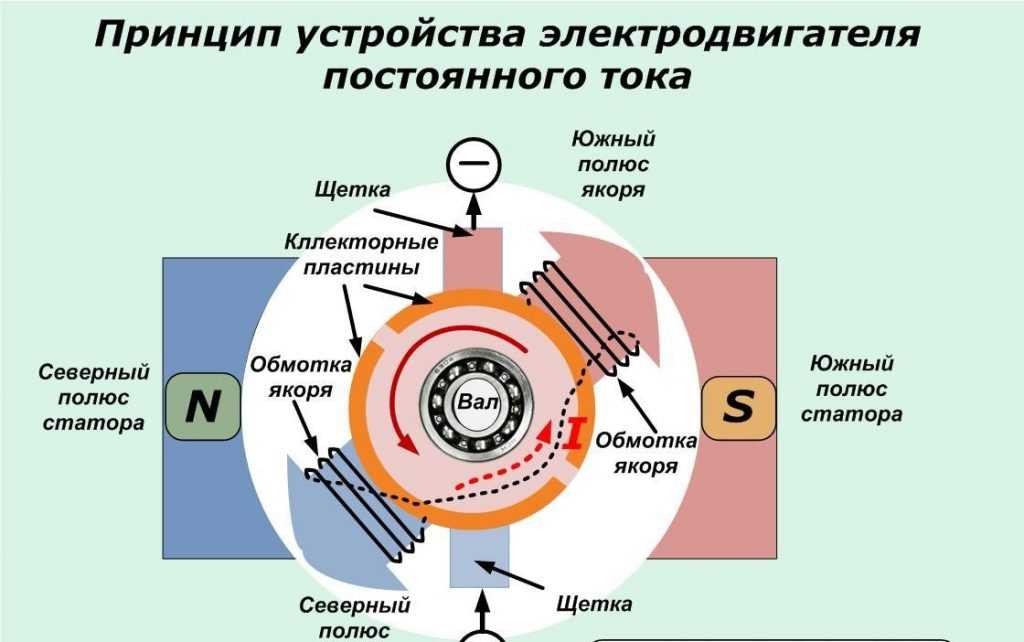 Но если ток превышает пределы, он будет снижать контроль скорости до тех пор, пока ток не уменьшится до безопасного уровня.
Но если ток превышает пределы, он будет снижать контроль скорости до тех пор, пока ток не уменьшится до безопасного уровня.
При наличии обратной связи по напряжению якоря скорость двигателя имеет тенденцию падать между состояниями полной нагрузки и холостого хода. Чтобы помочь компенсировать этот «падение» скорости, в привод включена обратная связь, называемая IR-компенсацией (аббревиатура от «компенсация сопротивления тока» из-за падения напряжения на якоре из-за нагрузки -E=IXR, закон Ома). Эта схема определяет ток якоря и подает небольшой дополнительный сигнал обратно на усилитель скорости.
В суммирующей цепи присутствуют три сигнала: положительное задание скорости, отрицательная обратная связь по напряжению якоря (ЭДС) и положительная компенсация IR. Сигнал компенсации IR добавляется к опорному сигналу скорости, чтобы компенсировать падение скорости, создаваемое нагрузкой.
При суммировании трех сигналов в одной точке возможна нестабильность. Для правильной настройки IR-компенсации регулировка обратной связи по скорости и напряжению якоря должна производиться при выключенной IR-компенсации. При наблюдении за двигателем во время ступенчатого изменения скорости компенсация IR постепенно увеличивается до тех пор, пока не возникнут колебания. Затем компенсация IR уменьшается до тех пор, пока колебание (неустойчивость) не прекратится. С этим типом управления с обратной связью возможна регулировка скорости на 2-3%.
При наблюдении за двигателем во время ступенчатого изменения скорости компенсация IR постепенно увеличивается до тех пор, пока не возникнут колебания. Затем компенсация IR уменьшается до тех пор, пока колебание (неустойчивость) не прекратится. С этим типом управления с обратной связью возможна регулировка скорости на 2-3%.
Обратная связь по напряжению якоря (управление ЭДС, регулирование крутящего момента)
Взаимосвязь между регулированием крутящего момента и регулированием скорости в стандартной конфигурации привода постоянного тока иллюстрирует важность реакции крутящего момента. Поскольку ток якоря в двигателе постоянного тока напрямую определяет крутящий момент, контроллер постоянного тока сконфигурирован как регулятор тока с обратной связью, использующий обратную связь по напряжению якоря (ЭДС). Затем регулятор скорости дает команду регулятору тока создать крутящий момент, необходимый для поддержания желаемой скорости.
Приводы с регулированием крутящего момента часто используются в приложениях с разделением нагрузки, где привод с регулированием скорости управляет скоростью приводимой машины, а «вспомогательный» привод с регулированием крутящего момента обеспечивает контролируемый уровень крутящего момента в каком-либо другом месте машины. Если нагрузка не ограничивает скорость привода с регулируемым крутящим моментом, скорость привода может превысить безопасный рабочий предел. Поэтому приводы с регулированием крутящего момента должны иметь механизм ограничения скорости, который предотвращает превышение скорости безопасного предела, если крутящий момент, создаваемый приводимой машиной, падает до нуля.
Если нагрузка не ограничивает скорость привода с регулируемым крутящим моментом, скорость привода может превысить безопасный рабочий предел. Поэтому приводы с регулированием крутящего момента должны иметь механизм ограничения скорости, который предотвращает превышение скорости безопасного предела, если крутящий момент, создаваемый приводимой машиной, падает до нуля.
В приводе постоянного тока крутящий момент можно регулировать напрямую, регулируя ток якоря. В любом двигателе крутящий момент является результатом силы между двумя магнитными полями. В двигателе (постоянного тока) крутящий момент легко и напрямую регулируется путем регулирования токов, управляющих потоком в двух магнитных полях. Поток обмотки возбуждения — это поток намагничивания двигателя, который поддерживается постоянным за счет обеспечения постоянного тока возбуждения. Поток, создающий крутящий момент двигателя, представляет собой поток, создаваемый током якоря, который регулируется для регулирования крутящего момента. Крутящий момент, создаваемый на любой скорости, определяется выражением:
Крутящий момент, создаваемый на любой скорости, определяется выражением:
Обратная связь тахометра
Когда скорость двигателя постоянного тока имеет первостепенное значение, ее можно измерить с помощью преобразователя и отрегулировать с помощью регулятора с обратной связью, как показано на Рисунке 5-14.
Рис. 5-14. Регулирование скорости с обратной связью — обратная связь тахометра
Преобразователь на рис. 5-14 представляет собой генератор тахометра. Как было рассмотрено ранее, тач представляет собой небольшой генератор, который выдает выходное напряжение, очень точно определяемое его рабочей скоростью. Существуют также импульсные тахометры, которые обеспечивают последовательность импульсов напряжения со средней частотой, точно пропорциональной средней скорости.
Регулятор скорости с обратной связью компенсирует любые изменения характеристик привода, вызванные изменениями нагрузки или внешними воздействиями, такими как напряжение сети и температура окружающей среды.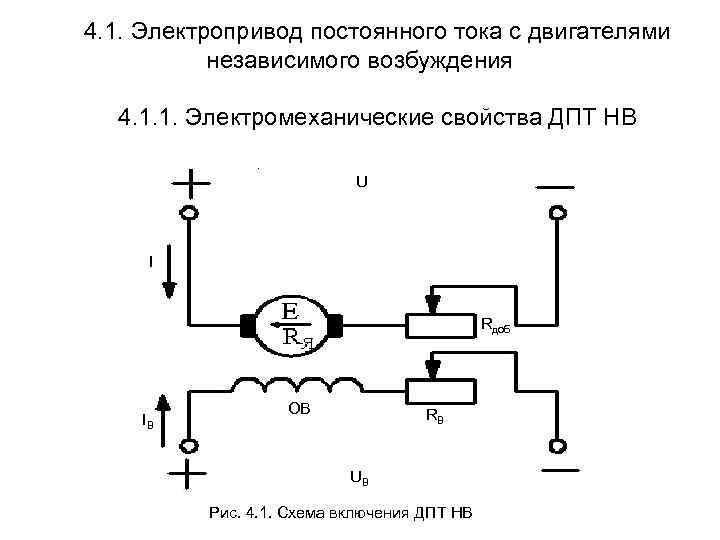 При использовании регулятора скорости с обратной связью наиболее важной характеристикой привода является его способность быстро реагировать на изменения требований к крутящему моменту.
При использовании регулятора скорости с обратной связью наиболее важной характеристикой привода является его способность быстро реагировать на изменения требований к крутящему моменту.
Уже представленные преобразователи будут задействованы в формировании фактического сигнала обратной связи по скорости. Точность системы будет
, связанный с регулированием устройства обратной связи и реакцией управления приводом.
Изоляция сигнала затвора и обратной связи по току в промышленных приводах двигателей
к
Дара О’Салливан и
Никола О’Бирн
Скачать PDF
Энергоэффективность электродвигателей находится в центре внимания органов регулирования энергетики во всем мире уже более двух десятилетий. Это часть глобальных усилий по минимизации выбросов углерода за счет сочетания повышения эффективности использования электроэнергии и преобразования части производства энергии с использованием возобновляемых источников. Ранние правила эффективности двигателя были добровольными, но вскоре они стали обязательными, при этом минимальный уровень эффективности повышался каждые пять-десять лет. Асинхронный двигатель с короткозамкнутым ротором (SQIM) был рабочей лошадкой в отрасли с тех пор, как электричество стало общедоступным, потому что он запускается и работает при прямом подключении к трехфазной сети переменного тока. Текущие стандарты IEC классифицируют эффективность этих двигателей по различным уровням в зависимости от номинальной мощности, которые варьируются от стандартной эффективности (IE1) до сверхвысокой эффективности (IE4). Сегодня уровни эффективности премиум-класса IE3 являются обязательными в крупнейших промышленных регионах мира, включая ЕС, США, Китай и Японию. Заводские операторы не сопротивлялись этому изменению, потому что капитальные затраты на двигатель составляют лишь небольшую часть стоимости электроэнергии в течение срока службы двигателя. Даже в случае замены двигателя премиум-класса на двигатель супер-премиум класса энергоэффективности IE4 мощностью 15 кВт дополнительные затраты могут быть возмещены за счет экономии энергии в течение двух лет.
Ранние правила эффективности двигателя были добровольными, но вскоре они стали обязательными, при этом минимальный уровень эффективности повышался каждые пять-десять лет. Асинхронный двигатель с короткозамкнутым ротором (SQIM) был рабочей лошадкой в отрасли с тех пор, как электричество стало общедоступным, потому что он запускается и работает при прямом подключении к трехфазной сети переменного тока. Текущие стандарты IEC классифицируют эффективность этих двигателей по различным уровням в зависимости от номинальной мощности, которые варьируются от стандартной эффективности (IE1) до сверхвысокой эффективности (IE4). Сегодня уровни эффективности премиум-класса IE3 являются обязательными в крупнейших промышленных регионах мира, включая ЕС, США, Китай и Японию. Заводские операторы не сопротивлялись этому изменению, потому что капитальные затраты на двигатель составляют лишь небольшую часть стоимости электроэнергии в течение срока службы двигателя. Даже в случае замены двигателя премиум-класса на двигатель супер-премиум класса энергоэффективности IE4 мощностью 15 кВт дополнительные затраты могут быть возмещены за счет экономии энергии в течение двух лет.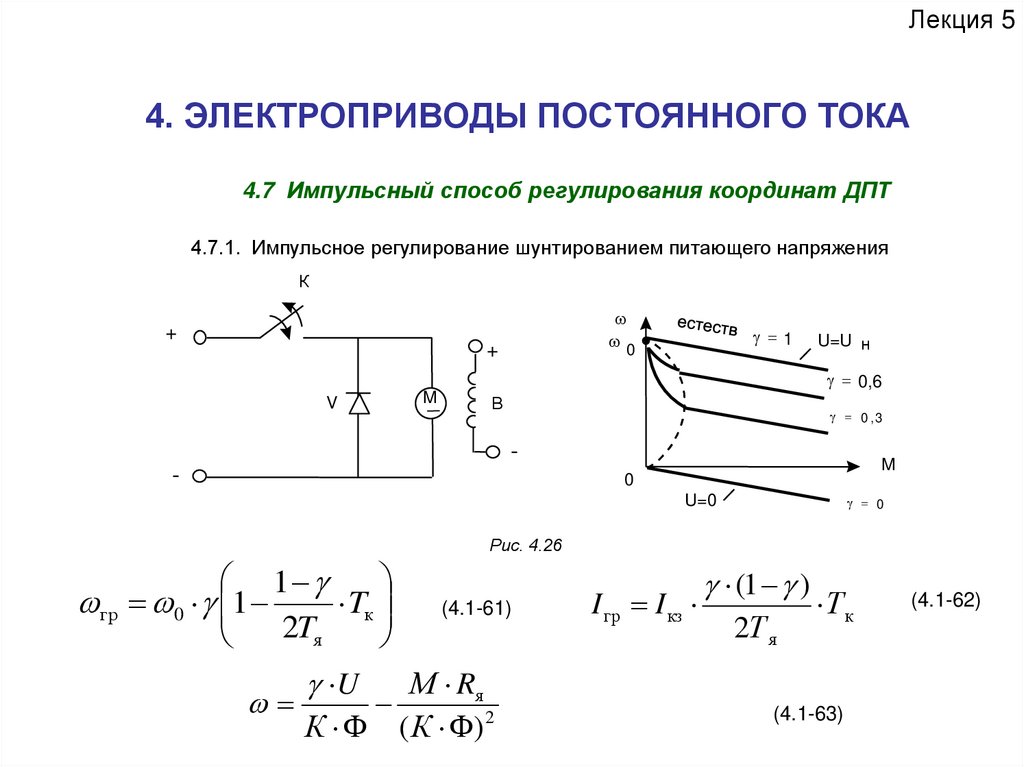 Эта тенденция в требованиях к эффективности двигателей отталкивает многих производителей оборудования от двигателей, работающих напрямую от сети, к решениям на основе инверторов. В этой статье рассматриваются различные архитектуры этих решений, а также их требования к изоляции привода и сигнала.
Эта тенденция в требованиях к эффективности двигателей отталкивает многих производителей оборудования от двигателей, работающих напрямую от сети, к решениям на основе инверторов. В этой статье рассматриваются различные архитектуры этих решений, а также их требования к изоляции привода и сигнала.
До сих пор производители
SQIM рассматривали более строгие правила эффективности как рыночную возможность. Двигатели премиум-класса и супер-премиум-класса стоят дороже с точки зрения материалов, конструкции и производства, чем двигатели со стандартным КПД, но они имеют более высокую рыночную цену. Однако разработка новых уровней классификации эффективности IEC IE5 и IE6 вызовет проблемы у производителей двигателей. Эксперты по двигателям считают, что будет очень сложно и дорого спроектировать SQIM, подключенные к линии, чтобы они соответствовали уровням эффективности выше IE4, особенно в более низких диапазонах мощности (де Алмейда). Наиболее вероятно, что только двигатели, подключенные к инвертору, будут соответствовать уровням эффективности IE5 и выше. Синхронные двигатели с постоянными магнитами (PMSM) традиционно выбирались для приложений со сверхвысокой эффективностью, но стоимость и доступность магнитов ротора из редкоземельных металлов вызывают озабоченность. Новые конструкции осевых двигателей с использованием ферритовых магнитов или новых магнитных материалов, разработанных для поддержки растущего рынка электромобилей, могут решить некоторые из этих проблем. Синхронные реактивные двигатели (SRM) также серьезно рассматриваются в качестве приводов с уровнем эффективности IE5 (ABB). SRM не имеет ни роторных обмоток, ни магнитов, что обеспечивает высокую эффективность при меньшей стоимости и размере корпуса, чем эквивалентный SQIM с такой же номинальной мощностью.
Синхронные двигатели с постоянными магнитами (PMSM) традиционно выбирались для приложений со сверхвысокой эффективностью, но стоимость и доступность магнитов ротора из редкоземельных металлов вызывают озабоченность. Новые конструкции осевых двигателей с использованием ферритовых магнитов или новых магнитных материалов, разработанных для поддержки растущего рынка электромобилей, могут решить некоторые из этих проблем. Синхронные реактивные двигатели (SRM) также серьезно рассматриваются в качестве приводов с уровнем эффективности IE5 (ABB). SRM не имеет ни роторных обмоток, ни магнитов, что обеспечивает высокую эффективность при меньшей стоимости и размере корпуса, чем эквивалентный SQIM с такой же номинальной мощностью.
Инверторы и изоляция
Эта тенденция к еще более эффективным двигателям увеличивает спрос на преобразователи частоты на основе IGBT, которые преобразуют выпрямленное входное напряжение сети в напряжения переменной частоты, приводящие в движение двигатель.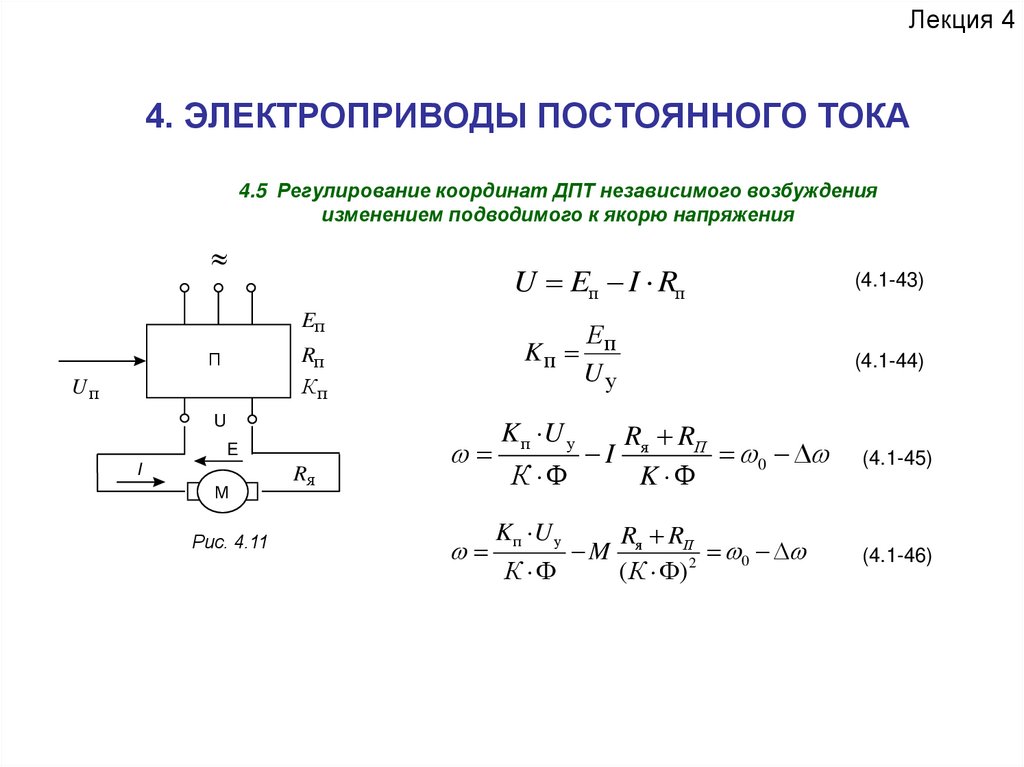 Двигатели с инверторным управлением имеют выходной крутящий момент или скорость, оптимально соответствующие нагрузке на вал, чтобы минимизировать потребление энергии, снизить рабочие температуры двигателя и повысить его надежность. Дополнительные функции управления, такие как мониторинг состояния, измерение мощности и подключение к заводской сети, обеспечивают эффективность и надежность процесса. Технология изоляции является важнейшим элементом системы привода, поскольку она надежно изолирует пользовательские интерфейсы контроллера от опасного высокого напряжения, подаваемого на инвертор.
Двигатели с инверторным управлением имеют выходной крутящий момент или скорость, оптимально соответствующие нагрузке на вал, чтобы минимизировать потребление энергии, снизить рабочие температуры двигателя и повысить его надежность. Дополнительные функции управления, такие как мониторинг состояния, измерение мощности и подключение к заводской сети, обеспечивают эффективность и надежность процесса. Технология изоляции является важнейшим элементом системы привода, поскольку она надежно изолирует пользовательские интерфейсы контроллера от опасного высокого напряжения, подаваемого на инвертор.
Несколько факторов высокого уровня влияют на требования к изоляции и архитектуру данного диска; к ним относятся уровень производительности электропривода, сложность коммуникационного интерфейса, архитектура контроллера и уровни напряжения, встречающиеся в системе, как показано на рис. 1.
&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;lt ;img src=’https://www. analog.com/-/media/analog/en/landing-pages/technical-articles/gate-drivers-and-current-feedback-signal-isolation-in-industrial-motor -drives/figure1.png?w=435 ‘ alt=’Рисунок 1’&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp ;amp;amp;amp;amp;amp;amp;gt;
analog.com/-/media/analog/en/landing-pages/technical-articles/gate-drivers-and-current-feedback-signal-isolation-in-industrial-motor -drives/figure1.png?w=435 ‘ alt=’Рисунок 1’&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp ;amp;amp;amp;amp;amp;amp;gt;
Рис. 1. Консолидированные архитектуры управления двигателем.
Во многих случаях ключевыми узлами изоляции являются драйверы затворов и цепи измерения тока фазы двигателя. Оба места включают контролируемые или измеряемые сигналы, которые привязаны к коммутируемым уровням высокого напряжения, и должны, как минимум, включать некоторую форму смещения уровня и, во многих случаях, изоляцию (либо функциональную, либо защитную) для подачи или извлечения сигналов, привязанных к земле.
Это проиллюстрировано на концептуальной схеме рис. 2, на которой изображена одна фаза инвертора, в которой указаны сдвиг уровня и требования к изоляции сигнала для сигнала драйвера затвора верхней стороны и сигнала измерения шунта фазного тока.
&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;lt ;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/gate-drivers-and-current-feedback-signal-isolation-in-industrial-motor -drives/figure2.png?w=435 ‘ alt=’Рисунок 2’&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp ;amp;amp;amp;amp;amp;amp;gt;
Рис. 2. Привязка сигналов в ветви трехфазного инвертора.
Изолированные драйверы затвора
Основные требования к изолированному драйверу затвора также можно понять из рисунка 2. Они включают функциональную или защитную изоляцию сигнала переключения логического уровня, а также выходной драйвер, способный управлять напряжением затвора IGBT после включения и выключения. пороги для переключения IGBT в требуемые моменты времени, минимизирующие потери проводимости устройства, потери переключения и генерацию электромагнитных помех. В трехфазных инверторах IGBT управляются в противофазе, так что IGBT верхнего и нижнего плеча никогда не включаются одновременно, даже на короткое время. Это требует введения небольшого периода мертвого времени между сигналами переключения верхнего и нижнего плеча. Минимизация этого периода простоя имеет решающее значение как с точки зрения производительности системы, так и с точки зрения защиты IGBT (О’Салливан).
В трехфазных инверторах IGBT управляются в противофазе, так что IGBT верхнего и нижнего плеча никогда не включаются одновременно, даже на короткое время. Это требует введения небольшого периода мертвого времени между сигналами переключения верхнего и нижнего плеча. Минимизация этого периода простоя имеет решающее значение как с точки зрения производительности системы, так и с точки зрения защиты IGBT (О’Салливан).
Включение IGBT требует, чтобы IGBT был переведен в область насыщения, где потери проводимости будут минимальными. Обычно это подразумевает напряжение включения> 12 В. Выключение IGBT требует, чтобы IGBT был переведен в область отсечки, чтобы он мог успешно блокировать обратное высокое напряжение на нем после включения IGBT на стороне высокого напряжения. В принципе, этого можно достичь, уменьшив напряжение эмиттера затвора IGBT до 0 В. Однако при включении транзистора верхнего плеча необходимо учитывать вторичный эффект. Быстрый переход напряжения в коммутационном узле вызывает переходный индуцированный ток, протекающий через паразитную емкость Миллера на нижней стороне IGBT (C ГД на рисунке 3). Этот ток протекает через полное сопротивление выключения драйвера затвора нижнего плеча (Z DRIVER на рис. 3), создавая скачки переходного напряжения на выводах эмиттера затвора IGBT нижнего плеча, как показано. Если это напряжение превысит пороговое напряжение IGBT, V TH , это может привести к кратковременному включению нижнего плеча IGBT, что приведет к кратковременному проскоку ветви инвертора, увеличению рассеиваемой мощности и снижению надежности.
Этот ток протекает через полное сопротивление выключения драйвера затвора нижнего плеча (Z DRIVER на рис. 3), создавая скачки переходного напряжения на выводах эмиттера затвора IGBT нижнего плеча, как показано. Если это напряжение превысит пороговое напряжение IGBT, V TH , это может привести к кратковременному включению нижнего плеча IGBT, что приведет к кратковременному проскоку ветви инвертора, увеличению рассеиваемой мощности и снижению надежности.
&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;lt ;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/gate-drivers-and-current-feedback-signal-isolation-in-industrial-motor -drives/figure3.png?w=435 ‘ alt=’Рисунок 3’&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp ;amp;amp;amp;amp;amp;amp;gt;
Рис. 3. Эффект Миллера при переключении IGBT.
Обычно существует два подхода к решению проблемы индуцированного включения инверторных IGBT — использование биполярных источников питания и/или добавление клещей Миллера. Возможность подключения биполярного источника питания к изолированной стороне драйвера затвора обеспечивает дополнительный запас для наведенного переходного процесса напряжения. Например, отрицательная шина питания -7,5 В означает, что индуцированный переход напряжения >8,5 В обычно необходим для ложного включения. Обычно этого достаточно для предотвращения ложного включения. Дополнительный подход заключается в уменьшении импеданса выключения схемы драйвера затвора в течение периода времени после завершения перехода выключения. Это известно как схема зажима Миллера. Теперь емкостный ток протекает в цепи с более низким импедансом, что снижает величину переходного напряжения. Дополнительная гибкость в управлении скоростью переключения может быть обеспечена за счет использования асимметричных резисторов затвора для включения и выключения. Все эти функции драйвера затвора оказывают положительное влияние на общую надежность и эффективность системы.
Возможность подключения биполярного источника питания к изолированной стороне драйвера затвора обеспечивает дополнительный запас для наведенного переходного процесса напряжения. Например, отрицательная шина питания -7,5 В означает, что индуцированный переход напряжения >8,5 В обычно необходим для ложного включения. Обычно этого достаточно для предотвращения ложного включения. Дополнительный подход заключается в уменьшении импеданса выключения схемы драйвера затвора в течение периода времени после завершения перехода выключения. Это известно как схема зажима Миллера. Теперь емкостный ток протекает в цепи с более низким импедансом, что снижает величину переходного напряжения. Дополнительная гибкость в управлении скоростью переключения может быть обеспечена за счет использования асимметричных резисторов затвора для включения и выключения. Все эти функции драйвера затвора оказывают положительное влияние на общую надежность и эффективность системы.
Защита от перегрузки по току в электроприводах обычно реализуется на нескольких уровнях. В схему защиты привода может быть включено различие между длительными перегрузками по току и переходными перегрузками по току, и эти события перегрузки по току имеют разные уровни срабатывания и постоянные времени. Этот тип защиты от перегрузки по току обычно реализуется на основе измерения тока. Для очень быстрых и потенциально катастрофических событий перегрузки по току, таких как короткие замыкания на выходах инвертора, может быть выгодно иметь быстродействующий механизм защиты, встроенный в драйвер затвора. Защита от насыщения реализуется путем контроля напряжения коллектор-эмиттер IGBT, когда IGBT включен. Когда БТИЗ находится в состоянии насыщения, напряжение в открытом состоянии зависит от уровня тока внутри БТИЗ, и эта функция защиты может быть разработана для запуска отказа и быстрого отключения БТИЗ, как только напряжение в открытом состоянии превысит допустимый уровень. Существует короткое время гашения, в течение которого схема защиты не контролирует напряжение IGBT в открытом состоянии.
В схему защиты привода может быть включено различие между длительными перегрузками по току и переходными перегрузками по току, и эти события перегрузки по току имеют разные уровни срабатывания и постоянные времени. Этот тип защиты от перегрузки по току обычно реализуется на основе измерения тока. Для очень быстрых и потенциально катастрофических событий перегрузки по току, таких как короткие замыкания на выходах инвертора, может быть выгодно иметь быстродействующий механизм защиты, встроенный в драйвер затвора. Защита от насыщения реализуется путем контроля напряжения коллектор-эмиттер IGBT, когда IGBT включен. Когда БТИЗ находится в состоянии насыщения, напряжение в открытом состоянии зависит от уровня тока внутри БТИЗ, и эта функция защиты может быть разработана для запуска отказа и быстрого отключения БТИЗ, как только напряжение в открытом состоянии превысит допустимый уровень. Существует короткое время гашения, в течение которого схема защиты не контролирует напряжение IGBT в открытом состоянии. Это включено для предотвращения ложного срабатывания при включении в результате перехода напряжения коллектор-эмиттер и/или переходного перегрузки по току во время включения.
Это включено для предотвращения ложного срабатывания при включении в результате перехода напряжения коллектор-эмиттер и/или переходного перегрузки по току во время включения.
Изолированный драйвер затвора ADUM4135 от Analog Devices включает возможность биполярного питания, зажим Миллера и асимметричные выходы включения и выключения. Кроме того, задержки распространения и, что более важно, перекос задержки распространения находятся на лучших в отрасли типичных значениях 50 нс и 15 нс соответственно. Влияние уменьшения времени простоя на систему показано на рис. 4, где выходное напряжение инвертора между линиями при низкой скорости двигателя изображено для двух разных уровней времени простоя. Увеличение времени простоя, связанное с технологией оптопар, приводит к увеличению напряжения двигателя и искажению тока. Это снижает производительность с точки зрения повышенных пульсаций крутящего момента и вибрации, а также снижает эффективность из-за увеличения гармонических потерь. Эти эффекты искажения особенно очевидны в инверторных приложениях, в которых контуры управления имеют относительно низкую производительность, однако даже в высокопроизводительных приводах с широкополосным управлением по току и скорости искажения, связанные с мертвым временем, могут быть ограничивающим фактором при работе на очень низких скоростях.
&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;lt ;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/gate-drivers-and-current-feedback-signal-isolation-in-industrial-motor -drives/figure4.png?w=435 ‘ alt=’Рисунок 4’&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp ;amp;amp;amp;amp;amp;amp;gt;
Рис. 4. Измеренное линейное напряжение двигателя при (а) времени простоя 500 нс (б) времени простоя 1 мкс.
Изолированный датчик тока
Узлы измерения тока фазы двигателя подключены к тому же узлу схемы, что и выход драйвера затвора, как показано на рис. 2 для измерения на основе шунта. Следовательно, они испытывают одинаковые напряжения изоляции и переходные процессы переключения. Измерение фазного тока имеет решающее значение для высокопроизводительного управления двигателем с обратной связью, и реализация высокоточного измерения в этой жесткой среде с электрическими шумами не является тривиальной задачей. В системах с более высокой мощностью используются изолированные датчики тока, такие как трансформаторы тока или датчики на эффекте Холла, которым присуща изоляция, в то время как в системах с более низкой мощностью наблюдается тенденция к использованию шунтирующих резисторов с изолированными модуляторами Σ-Δ, такими как AD7403 от Analog Devices. . Первые системы обычно используют функцию драйвера затвора денасыщения для реализации защиты от короткого замыкания по току, как описано выше, в то время как последние схемы на основе изолированных модуляторов с измерением тока могут реализовывать это непосредственно через быстрый цифровой фильтр грубой очистки (O’Byrne). Это требует точной синхронизации как для изолированного отклика модулятора, так и для низких задержек распространения в драйвере затвора, которые Analog Devices 9Технология 0128 i Ответвитель ® позволяет, в то время как традиционные решения на основе оптопары, как правило, страдают от более длительных задержек распространения.
В системах с более высокой мощностью используются изолированные датчики тока, такие как трансформаторы тока или датчики на эффекте Холла, которым присуща изоляция, в то время как в системах с более низкой мощностью наблюдается тенденция к использованию шунтирующих резисторов с изолированными модуляторами Σ-Δ, такими как AD7403 от Analog Devices. . Первые системы обычно используют функцию драйвера затвора денасыщения для реализации защиты от короткого замыкания по току, как описано выше, в то время как последние схемы на основе изолированных модуляторов с измерением тока могут реализовывать это непосредственно через быстрый цифровой фильтр грубой очистки (O’Byrne). Это требует точной синхронизации как для изолированного отклика модулятора, так и для низких задержек распространения в драйвере затвора, которые Analog Devices 9Технология 0128 i Ответвитель ® позволяет, в то время как традиционные решения на основе оптопары, как правило, страдают от более длительных задержек распространения.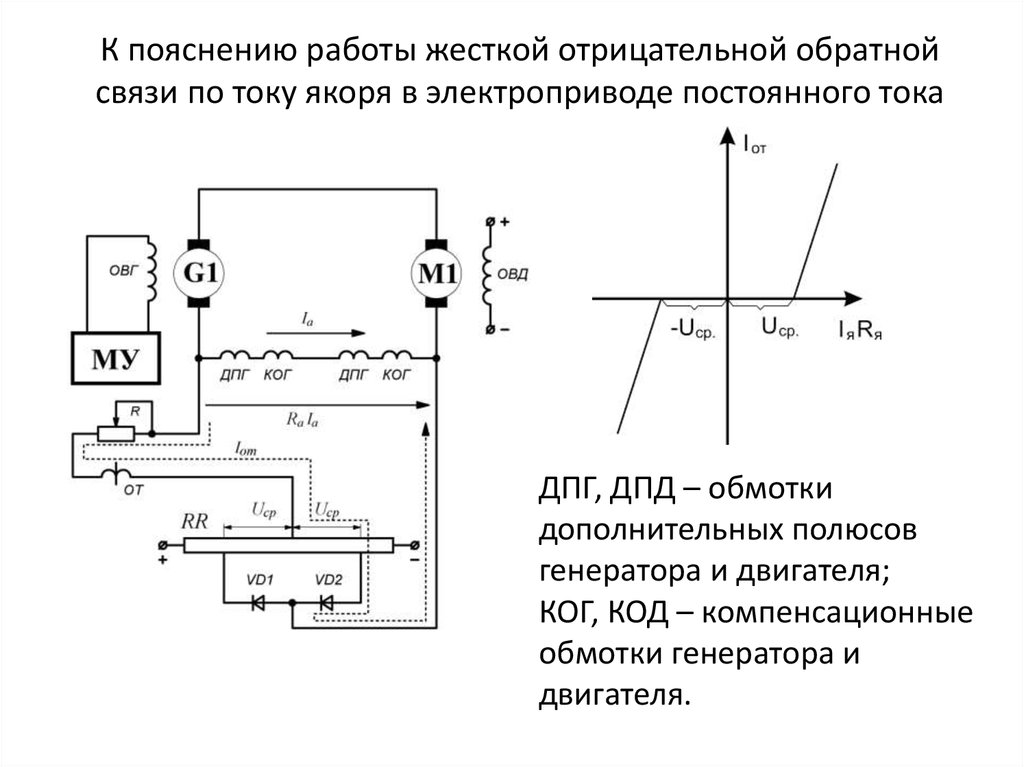
Регуляторная среда
После разработки архитектуры привода для обеспечения требуемой производительности система должна быть спроектирована в соответствии с отраслевыми стандартами электробезопасности. Крайне важно понимать требования к изоляции, предъявляемые к драйверу затвора и узлам измерения тока, чтобы выбрать соответствующие компоненты изоляции. Каждый узел может быть защитным разделением (усиленным), основной изоляцией или функциональной изоляцией. Требованием к любому отдельному узлу может быть защитная изоляция для защиты от поражения электрическим током, или изоляция для защиты низковольтных цепей, или изоляция для обеспечения целостности данных и уменьшения шума, как показано на рисунке 1. Требование на уровне системы может быть достигнуто за счет наличия несколько изоляционных барьеров. IEC61800-5-1 — это давний стандарт электроприводов системного уровня, которому конструкция привода должна соответствовать для обеспечения изоляции системы.
Каким бы ни был стандарт, он не касается оценки компонентов. IEC61800-5-1 предлагает использовать стандарты на уровне компонентов, которые поддерживают стандартные требования системы. IEC60747-5-5 касается компонентов на основе оптопары, а VDE-0884-10, версия IEC60747-5-5 без оптоизолятора, касается цифровых изоляторов с 2006 года. С тех пор VDE-0884-11 был разработан и утвержден в 2014 году с дополнительными Требования к характеристикам срока службы. Это было представлено в IEC как IEC60747-17 для утверждения, которое обычно имеет трехлетний цикл. В течение промежуточного периода VDE-0884-11 доступен в качестве эквивалентного стандарта IEC, как показано на рис. 5.
IEC61800-5-1 предлагает использовать стандарты на уровне компонентов, которые поддерживают стандартные требования системы. IEC60747-5-5 касается компонентов на основе оптопары, а VDE-0884-10, версия IEC60747-5-5 без оптоизолятора, касается цифровых изоляторов с 2006 года. С тех пор VDE-0884-11 был разработан и утвержден в 2014 году с дополнительными Требования к характеристикам срока службы. Это было представлено в IEC как IEC60747-17 для утверждения, которое обычно имеет трехлетний цикл. В течение промежуточного периода VDE-0884-11 доступен в качестве эквивалентного стандарта IEC, как показано на рис. 5.
&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;lt ;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/gate-drivers-and-current-feedback-signal-isolation-in-industrial-motor -drives/figure5.png?w=435 ‘ alt=’Рисунок 5’&amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp;amp ;amp;amp;amp;amp;amp;amp;gt;
Рис. 5. Эволюция стандартов без оптоизоляторов.
5. Эволюция стандартов без оптоизоляторов.
Заключение
Новые международные нормы по энергоэффективности двигателей ускоряют переход от асинхронных двигателей с фиксированной скоростью и прямым подключением к машинам с инверторным управлением. Общим требованием является привод затвора IGBT и некоторая форма измерения тока, как минимум, для защиты в простых инверторах с разомкнутым контуром, вплоть до высокоточного управления током в приводах и сервоприводах. Технологические требования к этим схемам все больше сосредоточены на точности синхронизации и измерения, а также на надежности и надежности. Изоляция сигнала представляет собой ключевую проблему как при реализации, так и при проектировании системы в рамках нормативно-правовой базы.
использованная литература
АББ. «Новая технология двигателя SynRM 2 от ABB обеспечит эффективность IE5 без редкоземельных магнитов». Пресс-релиз АББ. 3 апреля 2014 г.
3 апреля 2014 г.
де Алмейда, А.Т. FJTE Ferreira и G. Baoming. «Помимо асинхронных двигателей — технологические тенденции для повышения эффективности». IEEE Transactions on Industry Applications, Vol. 50, № 3. Май/июнь 2014 г.
О’Бирн, Н. «Методы измерения для промышленного управления движением». Аналоговые устройства, 2014.
О’Салливан, Д. и М. Морони. «Повышение эффективности управления промышленным двигателем с использованием технологии цифрового изолятора». Analog Devices, 2014.
Авторы
Дара О’Салливан
Дара О’Салливан — менеджер системных приложений в группе подключенных систем управления движением и робототехникой в бизнес-подразделении автоматизации и энергетики компании Analog Devices. Его область знаний — преобразование энергии, управление и мониторинг в промышленных приложениях управления движением. Он получил степень бакалавра технических наук, степень магистра технических наук и докторскую степень.