

Содержание
Обозначение элементов кинематических схем
Конструкторы, разрабатывающие различные машины и механизмы, часто выполняют кинематические схемы. При этом они руководствуются нормами и требованиями, изложенными в таком основополагающем документе, как ГОСТ 2.770–68.
В технике под схемой понимается графическое изображение, на котором показаны составные части изделия, их конструктивные особенности, а также существующие между ними связи с помощью упрощенных обозначений и символов. В составе пакетов конструкторской документации схемы играют достаточно важную роль. Они наличествуют как в общих описаниях изделий, инструкциях по их установке, наладке и эксплуатации. Схематические чертежи оказывают неоценимую помощь персоналу, занимающемуся монтажом, пуско-наладкой, ремонтом машин, механизмов и отдельных агрегатов. Схемы дают возможность быстро разобраться в том, каковы функциональные связи существуют между механическими, гидравлическими, электрическими и другими звеньями и системами технических устройств.
Когда разработка какой-либо машины только начинается, конструкторы от руки вычерчивают общий набросок будущего изделия, то есть составляют его первоначальную схему. На ней условно отображаются все основные узлы, а также показываются взаимосвязи между ними. Только после того, как принципиальная схема устройства отработана, начинается разработка чертежей и прочей конструкторской документации.
В современном машиностроении наибольшее применение находят те машины, в которых передача движения основывается на механическом, гидравлическом или электрическом принципе функционирования.
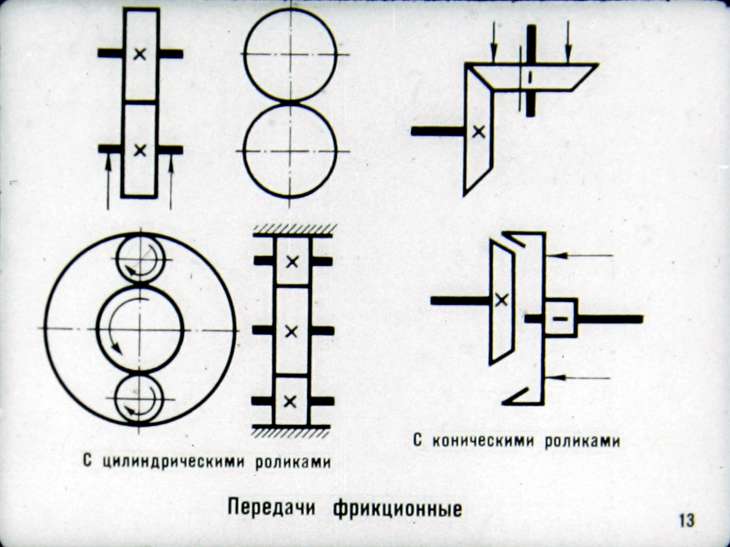
Предназначением кинематических схем является отражение той связи, в которой состоят рабочий механизм и привод. Следует отметить, что в современных автомобилях, станочном и прочем технологическом оборудовании механические передачи отличаются большой сложностью и содержат множество элементов. Поэтому для того, чтобы правильно создавать схемы таких конструкций, нужно прекрасно знать все условности, которые используются для графического изображения принципа работы машины или механизма без того, чтобы уточнять их конструктивные особенности.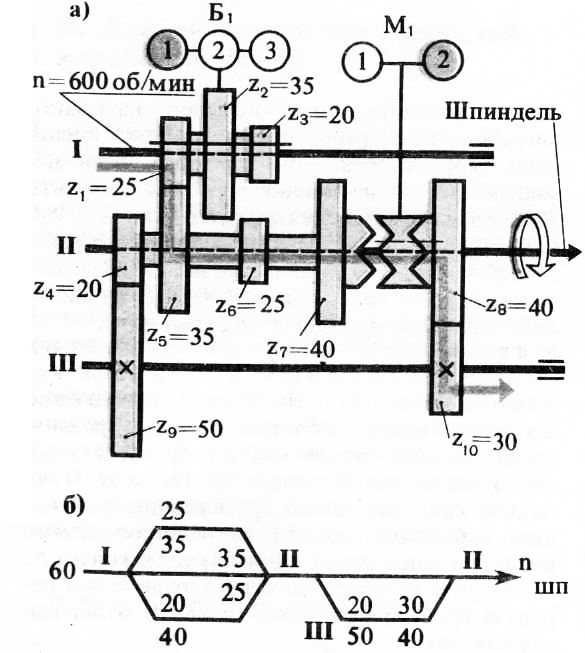 К примеру, кинематические схемы станочного оборудования отражают то, каким именно образом вращательное движение вала электродвигателя сообщается шпинделю, причем контур станка показывается (или не показывается) тонкой линией.
К примеру, кинематические схемы станочного оборудования отражают то, каким именно образом вращательное движение вала электродвигателя сообщается шпинделю, причем контур станка показывается (или не показывается) тонкой линией.
Если на схемах используются нестандартизованые условные обозначения, то они требуют пояснений. Что касается внешних очертаний и схематических разрезов, то на схемах они изображаются упрощенно, в соответствии с тем, какую именно конструкцию имеет каждый элемент изделия.
На схематических изображениях от каждой составной их части проводятся линии-выноски. От сплошных линий они начинаются стрелками, а от плоскостей – точками. На полках линий-выносок указываются порядковые номера позиций. При этом для таких элементов, как валы, используются римские цифры, а для остальных – арабские цифры. Под полками линий-выносок указываются параметры и основные характеристики составных частей схем.
Условные кинематические обозначения. Кинематическая схема.
 Настройка кинематических цепей станка » Строительство и ремонт: теория и практика
Настройка кинематических цепей станка » Строительство и ремонт: теория и практика
Достаточно полное представление о взаимодействии отдельных механизмов и деталей станка, участвующих в передаче и преобразовании движения, можно получить из рассмотрения кинематической схемы станка.
Кинематическая схема. Это особый условный чертеж, схематически изображающий совокупность всех кинематических цепей механизмов станка.
Главное назначение кинематической схемы — дать ясное представление о всех движениях, совершаемых отдельными органами станка, и их взаимосвязи. Поэтому в кинематических схемах допускают такие условности, которые не всегда соответствуют реальной конструкции, но способствуют уяснению кинематики станка. Так, например, вращающийся вал с прямолинейной осью может быть на схеме условно показан изогнутым или разорванным. На фиг. 15, а показано реальное расположение шестерен z1, z2 и z3 в механизме, а на фиг. 15, 6 — условное изображение тех же шестерен на кинематической схеме (развертка на плоскость).
В кинематических схемах каждую деталь или узел показывают условными обозначениями. Чертежи в машиностроении; условные обозначения для кинематических схем), которые уже изучены ранее.
При составлении кинематической схемы все валы последовательно обозначаются римскими цифрами; шестерни, участвующие в передаче, — числом зубьев или порядковым номером, червяки — числом заходов; реечные шестерни — числом зубьев и модулем и т. п. Муфты обычно обозначаются прописными буквами: втулки, сидящие на валах, — номером вала с буквенным индексом; например, III-а — втулка, сидящая на валу III.
На фиг. 16 показана весьма упрощенния (условная) кинематическая схема расточного станка.
При изучении кинематической схемы станка прежде всего необходимо уяснить, какие движения осуществляются в станке и какими рабочими органами станка они выполняются.
В расточном станке главное вращательное движение сообщается расточному шпинделю III или планшайбе 4.
В зависимости от характера выполняемой работы движение подачи сообщается расточному шпинделю III вдоль оси, столу 7 вдоль станины 1 или в поперечном к ней направлении, или шпиндельной бабке 3 — вверх или вниз по стойке 2.
После этого устанавливают источники движений в станке и их назначение, так как в современном расточном станке обычно имеется несколько электродвигателей. На приведенной условной схеме показаны два электродвигателя: главный электродвигатель N = 4 квт, n = 1450 об/мин. и электродвигатель N = 1,3 квт, n = 1450 об/мин., предназначенный для осуществления быстрых установочных перемещений всех подвижных органов станка.
При рассмотрении схемы сначала определяют кинематические цепи главного движения, а затем движения подачи.
Рассмотрим условную кинематическую схему, приведенную в нашем примере.
Кинематическая цепь главного движения. Шпиндель расточного станка, осуществляющий главное движение, приводится от главного электродвигателя ЭД. От главного ЭД N = 4 квт, n = 1450 об/мин. вращение через шестерни z1 и z2 (жестко сидящие на своих валах) передается валу I. На нем свободно сидят шестерни z3 и z5, имеющие торцовые зубья для сцепления с муфтой M1, которая перемещается вдоль вала I на скользящей шпонке.
вращение через шестерни z1 и z2 (жестко сидящие на своих валах) передается валу I. На нем свободно сидят шестерни z3 и z5, имеющие торцовые зубья для сцепления с муфтой M1, которая перемещается вдоль вала I на скользящей шпонке.
При включении муфты M1 вправо вращение от вала I передается через шестерни z3 и z4 полому шпинделю II, в котором размещается расточный шпиндель III. Последний получает вращение, посредством скользящей шпонки, что необходимо потому, что расточной шпиндель должен иметь осевое перемещение подачи.
При включении муфты M1 влево вращение получает планшайба 4 через шестерню z5 и венец с внутренними зубьями z6. В среднем положении муфты M1 шпиндель и планшайба вращаются одновременно.
Кинематические цепи подач. Для осуществления движения подачи в расточном станке должны быть кинематические цепи, связывающие вращение расточного шпинделя или планшайбы с линейными перемещениями расточного шпинделя, стола и шпиндельной бабки. Чтобы легче определить по кинематической схеме какую-либо кинематическую цепь подачи, прибегают к следующему искусственному приему.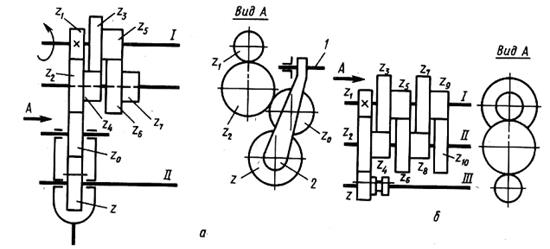
Считаем, что электродвигатель станка выключен и мысленно проворачиваем расточной шпиндель или планшайбу на один оборот. Тогда движущим звеном будет расточной шпиндель или планшайба, и мы проследим по кинематической цепи, как передается движение соответствующим подвижным органам станка.
Определим кинематические цепи подач за один оборот расточного шпинделя.
Мысленно провернем расточной шпиндель на один оборот. Для того чтобы передать от него движение далее, необходимо муфту M1 сдвинуть вправо. Тогда вращение через шестерни z7 и z8, жестко сидящие на валах, передается валу IV, а от него через жестко сидящие конические шестерни z9 и z10 главному распределительному валу V, от которого движение передается далее по двум направлениям.
Первое направление — осевая подача расточного шпинделя.
От вала V через червячную пару k = 1 и zч.к вращение сообщается валу VI и далее через шестерни z11 и z12, вал VII, шестерни z13 и z14 винту VIII с шагом t = 24 мм. Все шестерни жестко сидят на своих валах. Винт связан с гайкой ползуна II, который и перемещает расточной шпиндель в осевом направлении.
Винт связан с гайкой ползуна II, который и перемещает расточной шпиндель в осевом направлении.
Второе направление — продольная и поперечная подачи стола и вертикальная подача шпиндельной бабки.
От вала V через конические шестерни z15 и z16, жестко сидящие на своих валах, ходовой вал IX, шестерню z17, сидящую на скользящей шпонке, и жестко сидящую шестерню z18, вал X и жестко сидящие конические шестерни z19 и z20 вращение получает вал XI распределительного механизма, расположенного в столе. От него движение ответвляется по трем направлениям.
Продольная подача стола. Для включения продольной подачи зубчатую муфту М2, сидящую на скользящей шпонке на валу XI, надо сцепить с червяком k = 2, имеющим торцовые зубья. Червяк k = 2 сидит свободно на валу XI. Тогда вращение от вала XI передается через червячную пару k = 2 и zч.к реечной шестерне z = 11; m = 5. Последняя, перекатываясь по рейке, привинченной к станине, сообщает столу продольное перемещение.
Поперечная подача стола. Шестерня z25, сидящая на валу XI на скользящей шпонке, вводится в зацепление с шестерней z26, жестко сидящей на винте XII с шагом t = 6 мм, который и сообщает столу поперечное перемещение. Шестерня z25 связана с муфтой Мг общей рукояткой, и когда включается поперечная подача, муфта М2 расцепляется с червяком k = 2, и наоборот. Таким образом, одновременное включение поперечной и продольной подач исключается.
Шестерня z25, сидящая на валу XI на скользящей шпонке, вводится в зацепление с шестерней z26, жестко сидящей на винте XII с шагом t = 6 мм, который и сообщает столу поперечное перемещение. Шестерня z25 связана с муфтой Мг общей рукояткой, и когда включается поперечная подача, муфта М2 расцепляется с червяком k = 2, и наоборот. Таким образом, одновременное включение поперечной и продольной подач исключается.
Вертикальная подача шпиндельной бабки. Для включения вертикальной подачи зубчатую муфту М2 сцепляют с конической шестерней z21, сидящей на валу XI свободно. Вращение от вала XI конические шестерни z21 и z22, цилиндрические шестерни z23 и z24, вал XII через конические шестерни z27 и z28 передается винту вертикальных перемещений шпиндельной бабки с шагом t = 16 мм. Шестерни z22, z23, z27 и z28 жестко сидят на валах, а шестерня z = 24 — на скользящей шпонке.
Одновременно со шпиндельной бабкой получает вертикальное перемещение люнет 6 задней стойки 5, предназначенный для поддержания заднего конца борштанги, в которой крепится резец. Передний конец борштанги вводится и крепится в конической расточке головной части расточного шпинделя.
Передний конец борштанги вводится и крепится в конической расточке головной части расточного шпинделя.
От вала XIII вращение через конические шестерни z29 и z30 сообщается винту вертикальных перемещений люнета с шагом t = 6 мм.
Определим кинематические цепи подач за один оборот планшайбы. Проворачиваем планшайбу мысленно на один оборот. Зубчатый венец z6 передает вращение шестерне z5, свободно сидящей на валу I. Для того чтобы передать движение далее, надо муфту M1 включить влево. Тогда вращение получает вал I, шестерни z7 и z8 и т. д., как описано выше.
На нашей кинематической схеме изображена и кинематическая цепь быстрых, установочных перемещений всех подвижных органов станка. В этом случае отключается главный ЭД и включается ЭД быстрых перемещений N = 1,3 квт, n = 1450 об/мин. Быстрое вращение от него передается через шестерню z32 с предохранительной муфтой M3 и шестерню z33 валу XIV, а от него валу IX через шестерни z34 и z35 и валу V через конические шестерни z16 и z15. От валов IX и V быстрые перемещения получают все подвижные органы станка, как уже описано.
От валов IX и V быстрые перемещения получают все подвижные органы станка, как уже описано.
Все изложенное выше можно записать так, что будет ясно каким образом движение передается по кинематическим цепям. Для этого составляется структурная формула передачи движения. При этом пользуются следующими условностями.
а) Сопряженные кинематические звенья, передающие движение, обозначаются дробью. В числителе проставляется обозначение (или числовая характеристика) ведущего звена, а в знаменателе — ведомого.
Например, передачу вращения от вала I к валу II при помощи зубчатых колес z1 и z2 обозначают I — z1/z2 — II. Если на схеме указаны числа зубьев шестерен, например z1 = 30 и z2 = 45, то запись принимает вид
б) Если передача движения между двумя валами может осуществляться несколькими путями при помощи различных кинематических звеньев, то все варианты проставляются в разрыве между лучами, которыми обозначают направления передачи движения.
Например, обозначение
показывает, что вращение от вала I может передаваться валу II тремя путями (три луча): через шестерни z1 и z2, либо через шестерни z3 и z4 или z5 и z6.
Понятно, что одновременно все три пары зубчатых колес не могут быть включены, так как один и тот же ведомый вал II не может одновременно получать несколько различных скоростей вращения.
Для нашего примера структурная формула кинематической цепи главного движения изобразится следующим образом:
Структурная формула кинематической цепи подач за один оборот расточного шпинделя
Структурная формула кинематической цепи подач за один оборот планшайбы:
Структурная формула кинематической цепи быстрых перемещений рабочих органов станка:
Приведенная запись очень наглядна, удобна и использована при изучении кинематики расточных станков.
Глава 4. Основы кинематики твердых тел со связями
Йи Чжан
с
Сьюзан Фингер
Стефанни Беренс
Содержание
4.1 Степени свободы твердого тела
4.
 1.1 Степени свободы твердого тела на плоскости
1.1 Степени свободы твердого тела на плоскости
Определены степеней свободы (степень свободы) твердого тела
как количество независимых движений, которые он имеет. Рисунок 4-1
изображено твердое тело на плоскости. Определить степень свободы этого тела
мы должны рассмотреть, сколькими различными способами можно перемещать планку. В
двумерная плоскость, такая как этот экран компьютера, есть 3 степени свободы.
Бар может быть переведено по оси x , переведено
вдоль оси и , а вращается на вокруг своего центра масс.
Рисунок 4-1 Степени свободы твердого тела на плоскости
4.1.2 Степени свободы твердого тела в пространстве
Незакрепленное твердое тело в космосе имеет шесть степеней свободы:
три поступательных движения вдоль x , y и z
осей и три вращательных движения вокруг х , и и
и осей соответственно.
Рисунок 4-2 Степени свободы твердого тела в пространстве
4.
 2 Кинематические ограничения
2 Кинематические ограничения
Два или более твердых тела в космосе вместе называются твердыми телами .
система кузова . Мы можем воспрепятствовать движению этих независимых жестких
тела с кинематическими связями . Кинематика
ограничения — это ограничения между твердыми телами, которые приводят к
уменьшение степеней свободы системы твердых тел.
Термин «кинематическая пара» на самом деле относится к
кинематические связи между твердыми телами. Кинематические пары
делятся на младшие пары и высшие пары, в зависимости от того, как
тела соприкасаются.
4.2.1 Нижние пары в планарных механизмах
В планарных механизмах есть два типа нижних пар: вращательные пары и призматические пары.
Твердое тело на плоскости совершает только три независимых движения — два
поступательный и один вращательный — поэтому введение либо вращательной пары
или призматическая пара между двумя твердыми телами удаляет две степени
свобода.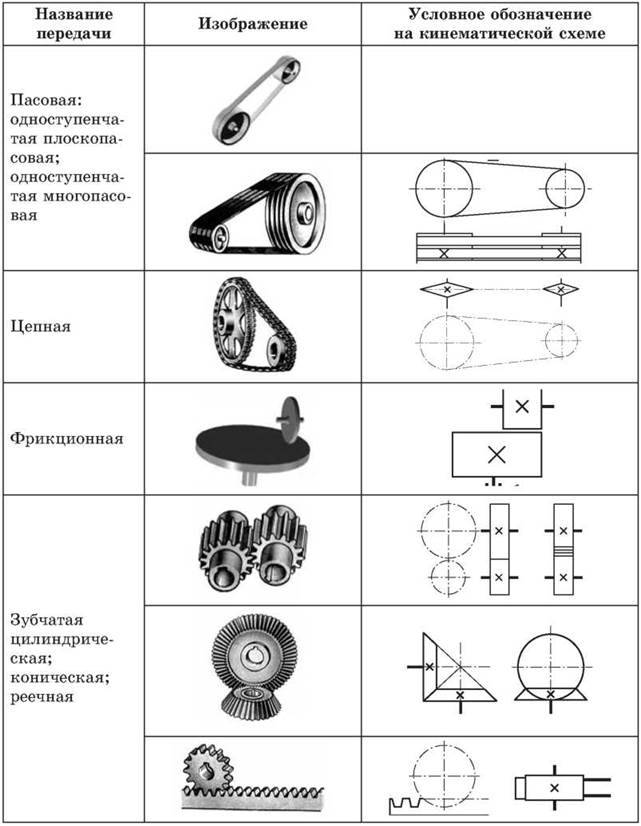
Рисунок 4-3 Плоская вращающаяся пара (R-пара)
Рисунок 4-4 Плоская призматическая пара (P-пара)
4.2.2 Нижние пары в пространственных механизмах
Есть шесть видов нижних пар в категории пространственных механизмов. Типы: сферическая пара, плоская пара,
цилиндрическая пара, вращающаяся
пара, призматическая пара и винтовая пара.
Рисунок 4-5 Сферическая пара (S-пара)
Сферическая пара удерживает два сферических центра вместе. Два
твердые тела, связанные этой связью, смогут
повернуть относительно осей x , y и z ,
но не будет относительного перевода по любому из этих
оси. Следовательно, сферическая пара лишает три степени свободы в
пространственный механизм. степеней свободы = 3 .
Рисунок 4-6 Плоская пара (E-пара)
Пара плоскостей удерживает вместе поверхности двух твердых тел.
Чтобы визуализировать это, представьте книгу, лежащую на столе, где она может двигаться.
в любом направлении, кроме как от стола. Два твердых тела, соединенных
такая пара будет иметь два независимых поступательных движения в
плоскость и вращательное движение вокруг оси, перпендикулярной
к самолету. Следовательно, плоская пара удаляет три степени
свобода пространственного механизма. В нашем примере книги не будет.
в состоянии подняться со стола или повернуться в стол. ГРИП =
3.
Рисунок 4-7 Цилиндрическая пара (C-пара)
Цилиндрическая пара удерживает две оси двух твердых тел.
выровнены. Два твердых тела, являющиеся частью такой системы, будут
имеют независимое поступательное движение вдоль оси и относительное
вращательное движение вокруг оси. Следовательно, цилиндрическая пара удаляет
четыре степени свободы от пространственного механизма. ГРИП = 2.
Рисунок 4-8 Вращающаяся пара (R-пара)
Вращающаяся пара удерживает оси двух твердых тел.
вместе. Два твердых тела, скрепленные вращательной парой, имеют
независимое вращательное движение вокруг общей оси. Следовательно,
вращающаяся пара убирает пять степеней свободы в пространственном
механизм. ГРИП = 1.
Рисунок 4-9 Призматическая пара (P-пара)
Призматическая пара удерживает две оси двух твердых тел на одной линии и
не допускать относительного вращения. Два твердых тела, ограниченные этим видом
связи сможет иметь независимое поступательное движение
вдоль оси. Следовательно, призматическая пара удаляет пять степеней
свобода пространственного механизма. ГРИП = 1.
Рисунок 4-10 Винтовая пара (H-пара)
Пара винтов удерживает две оси двух твердых тел на одной линии и
допускает относительное винтовое движение. Два твердых тела, ограниченные
винтовая пара движение, составляющее поступательное движение
вдоль оси и соответствующее вращательное движение вокруг оси.
Следовательно, винтовая пара убирает пять степеней свободы в пространстве.
механизм.
4.3 Закрепленные твердые тела
Твердые тела и кинематические связи являются основными компонентами
механизмы. Ограниченная система твердых тел может быть кинематической цепью, механизмом, конструкцией или ничем из этого.
Влияние кинематических связей на движение твердых тел
имеет два внутренних аспекта: геометрический и физический.
аспекты. Другими словами, мы можем анализировать движение ограниченного
твердые тела из их геометрических взаимосвязей или с помощью второго закона Ньютона.
Механизм – это система твердых тел со связями, в которой один из
тела является каркасом. Степени
свободы важны при рассмотрении системы жесткого тела с ограничениями
это механизм. Это менее важно, когда система представляет собой
структуры или когда она не имеет определенного движения.
Вычисление степеней свободы системы твердых тел происходит прямо
вперед. Любое неограниченное твердое тело имеет шесть степеней свободы.
пространство и три степени свободы на плоскости. Добавление кинематики
Добавление кинематики
связи между твердыми телами соответственно уменьшат
Степени свободы системы твердых тел. Мы обсудим больше на
эта тема для планарных механизмов в следующем разделе.
4.4 Степени свободы планарных механизмов
4.4.1 Уравнение Грюблера
Определение степеней свободы механизма
— количество независимых относительных движений между твердыми телами.
Например, на рис. 4-11 показаны несколько случаев
твердое тело, ограниченное разного рода парами.
Рисунок 4-11 Твердые тела, ограниченные различными типами плоских пар
На рис. 4-11а твердое тело ограничено вращательной парой, которая допускает только вращательное движение.
движение вокруг оси. Имеет одну степень свободы, поворачивается
точка А. Две потерянные степени свободы — это поступательные движения
вдоль 9Оси 0015 x и y . Единственный способ, которым твердое тело может
перемещение — это вращение вокруг фиксированной точки A.
На рис. 4-11b твердое тело ограничено призматической парой, которая позволяет только
поступательное движение. В двух измерениях он имеет одну степень
свобода, перемещаясь по оси x . В этом примере
тело утратило способность вращаться вокруг какой-либо оси, и оно не может двигаться
вдоль оси y .
На рис. 4-11c твердое тело ограничено высшей парой. Имеет две степени
свобода: перемещение по криволинейной поверхности и поворот вокруг
мгновенная точка контакта.
В общем случае твердое тело на плоскости имеет три степени свободы.
Кинематические пары — это ограничения на твердые тела, которые уменьшают
степени свободы механизма. На рис. 4-11 показаны три вида
пар в планарных механизмах. Эти
пары уменьшают количество степеней
свободы. Если мы создадим нижнюю пару
(рис. 4-11а,б), количество степеней свободы уменьшается до 2. Аналогично,
если мы создадим высшую пару (рис.
4-11в), количество степеней свободы уменьшено до 1.
Рисунок 4-12 Кинематические пары в планарных механизмах
Следовательно, мы можем написать следующее уравнение:
Где
- F = общее количество степеней свободы в механизме
- n = количество звеньев (включая
рама)- л = количество нижних пар
(одна степень свободы)- ч = количество старших пар
(две степени свободы) - n = количество звеньев (включая
Это уравнение также известно как уравнение Грюблера 9.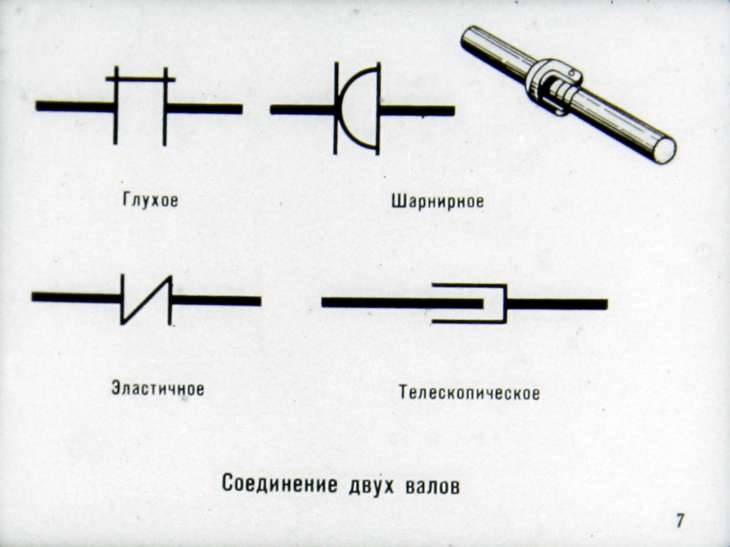 0017 .
0017 .
Пример 1
Посмотрите на фрамугу над дверью на рис. 4-13а. Открытие и
закрывающий механизм показан на рис. 4-13b. Давайте посчитаем его
степень свободы.
Рисунок 4-13 Механизм транца
n = 4 (звено 1,3,3 и кадр 4), l = 4 (в точках A, B, C, D), h = 0
Примечание: D и E функционируют как одна призматическая пара, поэтому они только
считаются одной нижней парой.
Пример 2
Рассчитайте степени свободы механизмов, показанных на рис. 4-14b.
Рисунок 4-14a представляет собой приложение механизма.
Рисунок 4-14 Самосвал
n = 4, l = 4 (в точках A, B, C, D), h = 0
Пример 3
Рассчитайте степени свободы механизмов, показанных на рис. 4-15.
Рисунок 4-15 Расчет степеней свободы
Для механизма на рис. 4-15а
п = 6, л = 7, ч = 0
Для механизма на рис.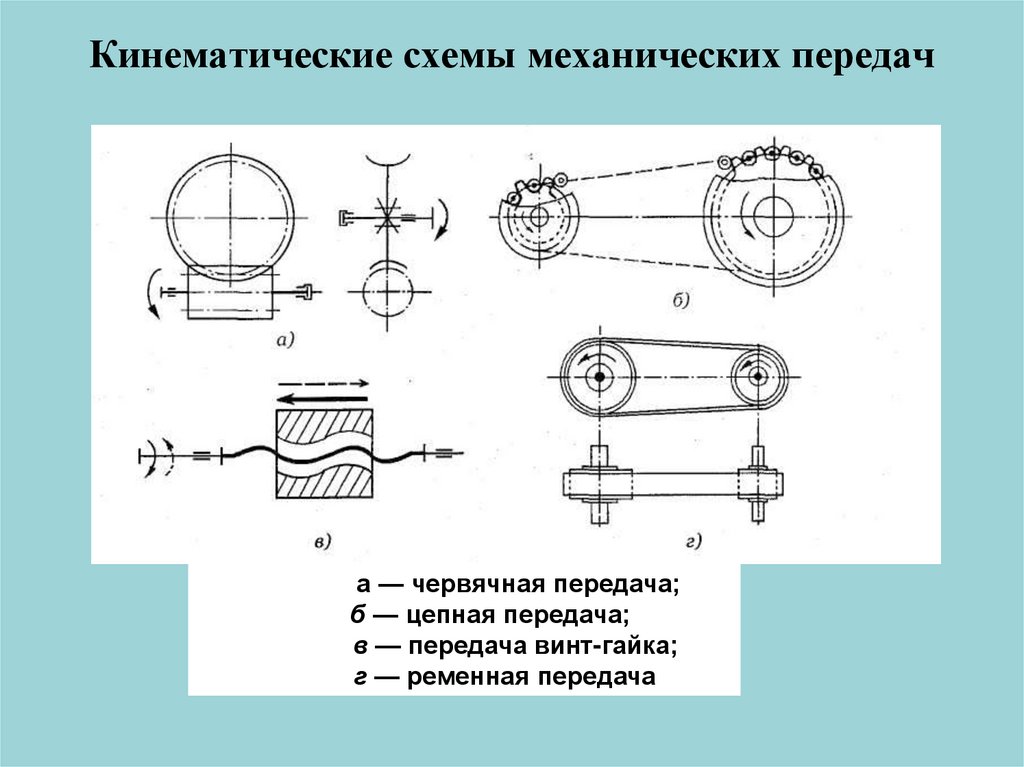 4-15b
4-15b
п = 4, л = 3, ч = 2
Примечание: Вращение ролика не влияет на
взаимосвязь входного и выходного движения механизма. Следовательно,
свобода валика учитываться не будет; Это называется
пассивный или резервный степень свободы.
Представьте, что ролик приварен к звену 2 при подсчете градусов
свободы механизма.
4.4.2 Критерий Куцбаха
Количество степеней свободы механизма
также называется мобильность устройства.
мобильность количество входных параметров (обычно пара
переменные), которые должны контролироваться независимо, чтобы устройство
в определенную позицию. Критерий Куцбаха ,
которое аналогично уравнению Грюблера,
вычисляет мобильность .
Для управления механизмом количество независимых входов
движения должны равняться числу степеней свободы механизма.
Например, транец на рис. 4-13а
имеет одну степень свободы, поэтому ему нужен один независимый вход
движения, чтобы открыть или закрыть окно. То есть вы просто толкаете или тянете стержень 3
То есть вы просто толкаете или тянете стержень 3
для управления окном.
Чтобы увидеть еще один пример, механизм на рис.
4-15а также имеет 1 степень свободы. Если независимый вход
применяется к звену 1 ( например, , двигатель установлен на шарнире A для привода
звено 1), механизм будет иметь заданное движение.
4.5 Конечное преобразование
Конечное преобразование используется для описания движения точки на
твердое тело и движение самого твердого тела.
4.5.1 Конечное плоское вращательное преобразование
Рисунок 4-16 Точка на плоском твердом теле, повернутом на угол
Предположим, что точка P на твердом теле совершает поворот
описывающий круговой путь от P 1 до
P 2 вокруг начала системы координат. Мы можем
описать это движение оператором вращения
Р 12 :
где
4.
 5.2 Конечный планарный поступательный
5.2 Конечный планарный поступательный
Трансформация
Рисунок 4-17 Точка на плоском твердом теле, смещенная на расстояние
Предположим, что точка P на твердом теле проходит через
перевод, описывающий прямой путь от P 1 до
P 2 с изменением координат (x, y). Мы можем описать это
движение с оператором перевода T 12 :
где
4.5.3 Конкатенация конечных плоских перемещений
Рисунок 4-18 Конкатенация конечных плоских перемещений в пространстве
Предположим, что точка P на твердом теле совершает поворот
описывающий круговой путь от P 1 до
P 2 ‘ вокруг начала системы координат, затем
перевод, описывающий прямой путь от P 2 ‘ до
Р 2 . Мы можем представить эти два шага как
и
Мы можем объединить эти движения, чтобы получить
где D 12 — оператор плоского общего перемещения .
:
4.5.4 Плоское преобразование твердого тела
Мы обсудили различные преобразования для описания
перемещения точки твердого тела. Могут ли эти операторы быть
применительно к перемещениям системы точек, такой как твердая
тело?
Мы использовали однородную матрицу-столбец 3 x 1 для описания вектора
представляющий одну точку. Выгодная особенность планара 3 х 3
поступательные, вращательные и общие матричные операторы смещения
заключается в том, что их можно легко запрограммировать на компьютере для управления 3
x n матрица из n векторов-столбцов, представляющих n точек твердого тела.
Поскольку расстояние каждой частицы твердого тела от любой другой
точка твердого тела постоянна, векторы, определяющие положение каждой точки
твердого тела должно претерпевать такое же преобразование, когда твердое тело
тело движется и задана правильная ось, угол и/или перемещение
представлять его движение. (Сандор
и Эрдман 84).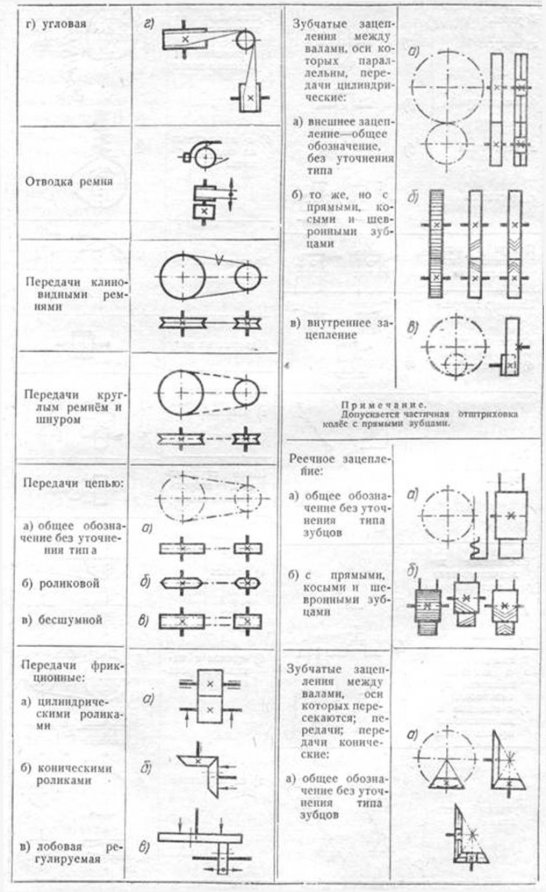 Например, общее плоское преобразование
Например, общее плоское преобразование
за три очка A, B, C на жестком корпусе можно изобразить
к
4.5.5 Пространственное вращательное преобразование
Мы можем описать оператор пространственного вращения для вращательного
преобразование точки относительно единичной оси u , проходящей через
начало системы координат. Предположим, угол поворота точки
около u есть ,
оператор вращения будет выражен как
где
- u x , u y , u z являются ортографическими
проекция единичной оси u на x , y , и
и осей соответственно.- с =
грех- с =
потому что- v = 1 —
потому что - с =
4.5.6 Пространственное поступательное преобразование
Предположим, что точка P на твердом теле проходит через
перевод, описывающий прямой путь от P 1 по
P 2 с заменой координат (x, y, z) мы можем описать это
движение с оператором перевода T :
4.
 5.7 Матрица пространственного перемещения и вращения для оси
5.7 Матрица пространственного перемещения и вращения для оси
Через происхождение
Предположим, что точка P на твердом теле вращается под углом
перемещение относительно единичной оси u , проходящей через начало координат
сначала систему координат, а затем перевод
D u вдоль u . Этот состав этого вращательного
преобразование, и это трансляционное преобразование является винтом
движение. Соответствующий ему матричный оператор, винт
оператор , является конкатенацией оператора перевода в уравнении 4-7 и оператора поворота в уравнении 4-9.
4.6 Матрица преобразования между твердыми телами
4.6.1 Матрица преобразования между двумя Arbitray
Твердые тела
Для системы твердых тел можно установить локальную декартову
система координат для каждого твердого тела. Матрицы преобразования
используется для описания относительного движения между твердыми телами.
Например, два твердых тела в пространстве имеют локальные координаты
системы x 1 y 1 z 1 и
х 2 у 2 z 2 . Пусть точка P будет
Пусть точка P будет
прикреплен к корпусу 2 в месте (x 2 , y 2 ,
я 2 ) в локальной системе координат тела 2. Чтобы найти
расположение P относительно локальной системы координат тела 1,
мы знаем, что точка x 2 y 2 z 2
можно получить у x 1 y 1 z 1 с помощью
комбинируя перемещение L x1 по оси x и
вращение z вокруг z
ось. Мы можем вывести матрицу преобразования следующим образом:
Если твердое тело 1 закрепить в виде рамы,
На этом теле может быть создана глобальная система координат. Следовательно
приведенное выше преобразование можно использовать для отображения локальных координат
указать в глобальных координатах.
4.6.2 Кинематические ограничения между двумя жесткими
Кузова
Приведенная выше матрица преобразования является конкретным примером для двух
несвязанные твердые тела. Матрица преобразования зависит от
Матрица преобразования зависит от
относительное положение двух твердых тел. Если соединить два жестких
тела с кинематической связью, их
степени свободы уменьшатся. Другими словами, их родственник
движение будет задано в некоторой степени.
Предположим, мы свяжем два твердых тела с помощью вращающейся пары, как показано на рис. 4-19. Мы можем
по-прежнему запишите матрицу преобразования в той же форме, что и уравнение 4-18.
Рисунок 4-19 Относительное положение точек на зависимых телах
Отличие в том, что L x1 является константой
теперь, потому что вращающаяся пара фиксирует начало системы координат
x 2 y 2 z 2 относительно системы координат
х 1 y 1 z 1 . Тем не менее, ротация
г
все еще является переменной. Таким образом, кинематические ограничения задают
матрица преобразования в некоторой степени.
4.6.3 Обозначение Денавита-Хартенберга
Обозначение Денавита-Хартенберга (Denavit & Hartenberg 55)
широко используется при преобразовании систем координат рычажных механизмов и механизмов роботов. Может быть
Может быть
используется для представления матрицы преобразования между ссылками, как показано на
Рисунок 4-20.
Рисунок 4-20 Обозначения Денавита-Хартенберга
На этом рисунке
- z i-1 и z i — оси двух вращательных пар;
- и
угол между осями x i-1 и x i ; - d i — расстояние между началом системы координат
х i-1 y i-1 z i-1 и подножие обыкновенного
перпендикуляр; - a i — расстояние между двумя футами общего перпендикуляра;
- и
угол между осями z i-1 и z i ;
Матрица преобразования будет T (i-1)i
Приведенную выше матрицу преобразования можно обозначить как T(a i ,
и , и , д и )
для удобства.
4.6.4 Применение матриц преобразования к связям
Рычажный механизм состоит из нескольких связанных твердых тел. Как
Как
механизм, рычажный механизм должен иметь раму. Матричный метод может быть
используется для вывода кинематических уравнений рычажного механизма. Если все
ссылки образуют замкнутый цикл, конкатенация всех
матрицы преобразования будут единичной матрицей. Если механизм
имеет n ссылок, будем иметь:
Т 12 Т 23 …Т (n-1)n = I
(4-20)
Содержание
Полное оглавление
- 1 Введение в механизмы
- 2 Механизмы и простые машины
- 3 Подробнее о машинах и механизмах
- 4 Базовая кинематика жестких тел со связями
- 4.1 Степени свободы твердого тела
- 4.1.1 Степени свободы твердого тела на плоскости
- 4.1.2 Степени свободы твердого тела в пространстве
- 4.2 Кинематические ограничения
- 4.2.1 Нижние пары в планарных механизмах
- 4.2.2 Нижние пары в пространственных механизмах
- 4.
 3 Закрепленные твердые тела
3 Закрепленные твердые тела- 4.4 Степени свободы планарных механизмов
- 4.4.1 Уравнение Грюблера
- 4.2.2 4.4.2 Критерий Куцбаха
- 4.5 4.5 Конечное преобразование
- 4.5.1 Конечное плоское вращательное преобразование
- 4.5.2 Конечное планарное поступательное преобразование
- 4.5.3 Конкатенация конечных планов
Перемещения- 4.5.4 Плоское преобразование твердого тела
- 4.5.5 Преобразование пространственного вращения
- 4.5.6 Пространственное поступательное преобразование
- 4.5.7 Матрица пространственного перемещения и вращения для
Ось через происхождение - 4.5.2 Конечное планарное поступательное преобразование
- 4.6 Матрица преобразования между твердыми телами
- 4.6.1 Матрица преобразования между двумя массивами
Твердые тела- 4.6.2 Кинематические ограничения между
Два твердых тела- 4.6.3 Нотация Денавита-Хартенберга
- 4.6.4 Применение матриц преобразования
к связям - 4.6.2 Кинематические ограничения между
- 4.1.1 Степени свободы твердого тела на плоскости
- 5 плоских связей
- 6 кулачков
- 7 передач
- 8 Другие механизмы
Индекс- ссылок
- 2 Механизмы и простые машины
sfinger@ri.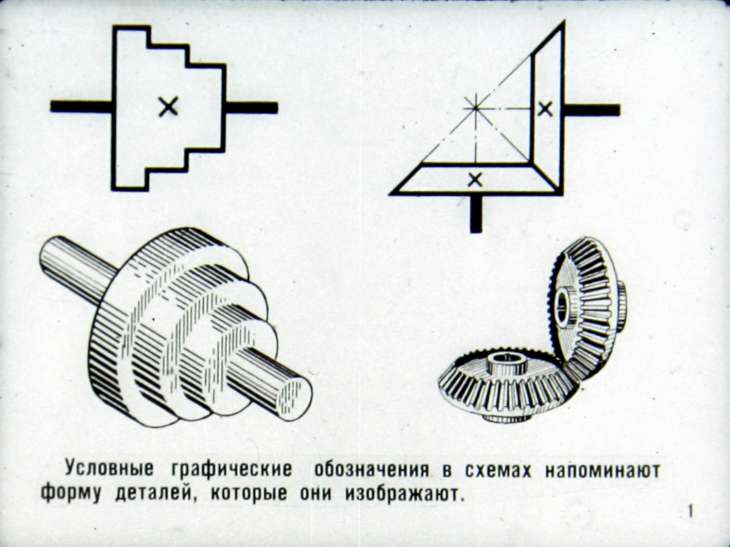 cmu.edu
cmu.edu
Кинематические уравнения
Целью этого первого раздела Класса физики было исследование разнообразных средств, с помощью которых можно описать движение объектов. Разнообразие репрезентаций, которые мы исследовали, включает словесные репрезентации, графические репрезентации, числовые репрезентации и графические репрезентации (графики положение-время и графики скорость-время). В Уроке 6 мы исследуем использование уравнений для описания и представления движения объектов. Эти уравнения известны как кинематические уравнения.
Существует множество величин, связанных с движением объектов: перемещение (и расстояние), скорость (и скорость), ускорение и время. Знание каждой из этих величин дает описательную информацию о движении объекта. Например, если известно, что автомобиль движется с постоянной скоростью 22,0 м/с, на север в течение 12,0 секунд при смещении на север на 264 метра, то движение автомобиля полностью описано. И если известно, что вторая машина разгоняется из положения покоя с ускорением в восточном направлении 3,0 м/с 2 за время 8,0 секунд, обеспечивая конечную скорость 24 м/с, восточное и смещение в восточном направлении 96 метров, то движение этого автомобиля полностью описано. Эти два утверждения обеспечивают полное описание движения объекта. Однако такая полнота не всегда известна. Часто бывает известно лишь несколько параметров движения объекта, а остальные неизвестны. Например, приближаясь к светофору, вы можете знать, что скорость вашего автомобиля составляет 22 м/с на восток, а ускорение заноса составляет 8,0 м/с.0774 2 , Запад. Однако вы не знаете, какое смещение испытает ваша машина, если вы нажмете на тормоза и занесете до остановки; и вы не знаете время, необходимое для остановки. В таком случае неизвестные параметры могут быть определены с использованием принципов физики и математических уравнений (кинематических уравнений).
Эти два утверждения обеспечивают полное описание движения объекта. Однако такая полнота не всегда известна. Часто бывает известно лишь несколько параметров движения объекта, а остальные неизвестны. Например, приближаясь к светофору, вы можете знать, что скорость вашего автомобиля составляет 22 м/с на восток, а ускорение заноса составляет 8,0 м/с.0774 2 , Запад. Однако вы не знаете, какое смещение испытает ваша машина, если вы нажмете на тормоза и занесете до остановки; и вы не знаете время, необходимое для остановки. В таком случае неизвестные параметры могут быть определены с использованием принципов физики и математических уравнений (кинематических уравнений).
БОЛЬШАЯ 4
Кинематические уравнения представляют собой набор из четырех уравнений, которые можно использовать для прогнозирования неизвестной информации о движении объекта, если известна другая информация. Уравнения можно использовать для любого движения, которое можно описать либо как движение с постоянной скоростью (ускорение 0 м/с/с), либо как движение с постоянным ускорением. Они никогда не могут быть использованы в течение какого-либо периода времени, в течение которого изменяется ускорение. Каждое из кинематических уравнений включает четыре переменные. Если известны значения трех из четырех переменных, то можно вычислить значение четвертой переменной. Таким образом, кинематические уравнения обеспечивают полезные средства прогнозирования информации о движении объекта, если известна другая информация. Например, если известно значение ускорения, а также значения начальной и конечной скорости буксующего автомобиля, то перемещение автомобиля и время можно предсказать с помощью кинематических уравнений. Урок 6 этого раздела будет посвящен использованию кинематических уравнений для предсказания числовых значений неизвестных величин движения объекта.
Они никогда не могут быть использованы в течение какого-либо периода времени, в течение которого изменяется ускорение. Каждое из кинематических уравнений включает четыре переменные. Если известны значения трех из четырех переменных, то можно вычислить значение четвертой переменной. Таким образом, кинематические уравнения обеспечивают полезные средства прогнозирования информации о движении объекта, если известна другая информация. Например, если известно значение ускорения, а также значения начальной и конечной скорости буксующего автомобиля, то перемещение автомобиля и время можно предсказать с помощью кинематических уравнений. Урок 6 этого раздела будет посвящен использованию кинематических уравнений для предсказания числовых значений неизвестных величин движения объекта.
Четыре кинематических уравнения, описывающие движение объекта:
В приведенных выше уравнениях используются различные символы. Каждый символ имеет свое особое значение. Символ d обозначает смещение объекта.
