Содержание
Электрическая схема мостового крана
Главная » Схемы и книги
На чтение 2 мин. Просмотров 9.9k.
На многих производствах, на складах, в магазинах для поднятия и перенесения грузов используются краны мостовые электрические.
Принципы их работы можно отследить с помощью электрической схемы – специального чертежа, отражающего электрические соединения и направление движения тока, а также работу отдельных участков цепи.
Мостовые краны имеют различные конструкции и назначения. Однако при составлении схем обязательно учитываются возможности защиты механизма от перегрузок и перепадов напряжения, варианты обратного хода тока, способы автоматического торможения, и отключения двигателя при остановке.
Жирными линиями выделяются основные линии тока (силовые цепи электродвигателя), а тонкими – вспомогательные направления (управление механизмом).
Составление электрических схем происходит для кранов, находящихся в нормальном (без напряжения и при отсутствии внешних воздействий), состоянии system.
Электрическая схема 4-х двигательного мостового крана
Существуют специальные символы, характеризующие тот или иной объект или узел на электрической схеме.
Например, барабанные контроллеры представляются в виде развёрток, подвижные контакты отображаются прямоугольниками, неподвижные элементы – закрашенными кружочками, а положение контроллеров задаётся параллельными линиями с надписанными сверху цифрами.
Схема мостового крана электрического (управление с пола)
Как правило, электрические схемы указывают соединения компонентов, но не передают пропорциональность их расположения.
Обязательно посмотрите видео – в нем кратко и понятно все обьясняется:
 electrical circuit crane beam .» src=»https://www.youtube.com/embed/FWmGyKnkCdI?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»> Схема кран–балки показывает энергораспределение питания на узлы подъемного устройства
electrical circuit crane beam .» src=»https://www.youtube.com/embed/FWmGyKnkCdI?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»> Схема кран–балки показывает энергораспределение питания на узлы подъемного устройства
Электродвигателями талей и кран-балок управляют с помощью реверсивных магнитных пускателей и пусковых кнопок, подвешиваемых на гибком бронированном кабеле. Напряжение к катушкам и контактам контакторов подъема КМ1 (см. рисунок выше), спуска КМ2, передвижения вперед КМЗ и вспять КМ4 подводится через автоматический выключатель и кабель либо контактные провода. Движение подъемного устройства ввысь ограничивает конечный выключатель SQ.
Блокировка реверсивных контакторов движков от одновременного включения осуществляется двухцепными клавишами и механической блокировкой самих контакторов (либо размыкающими блок-контактами контакторов).
Мостовые краны — сила производства
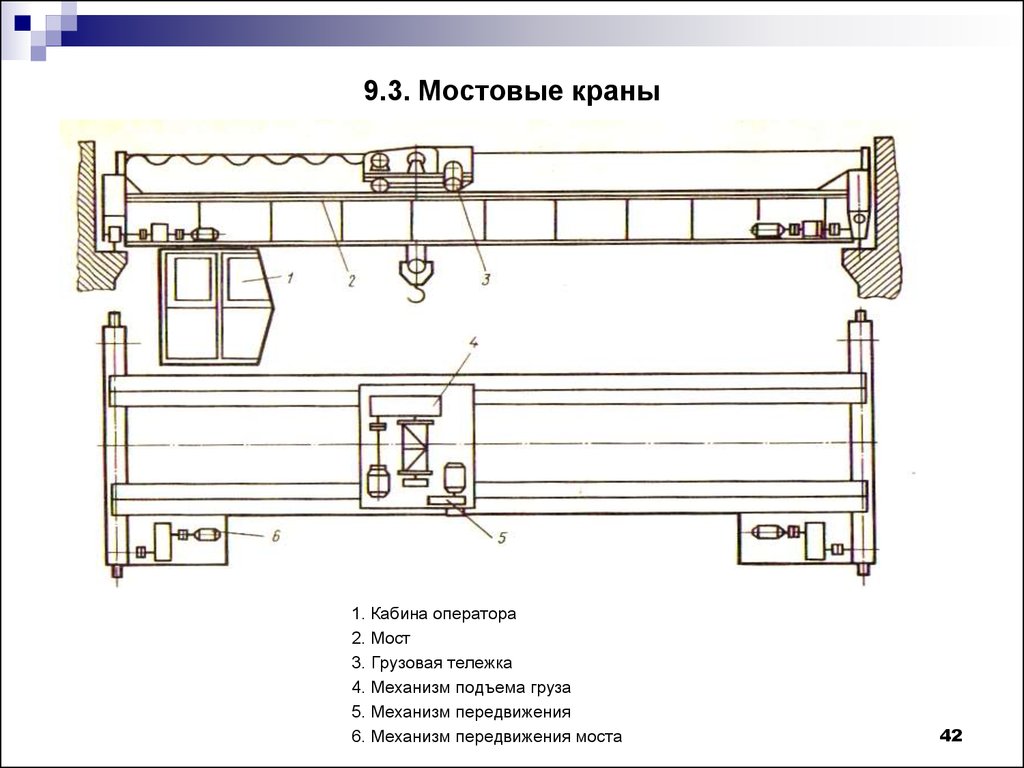
На производстве любого уровня и отрасли деятельности возникает необходимость перемещения заготовок, болванок, изделий между участками внутри цеха. Для перемещения грузов широкое распространение получили мостовые, консольные, козловые краны. Кран это механизм циклического действия, предназначенный для подъема и перемещения грузов в пределах ограниченной рабочей зоны.
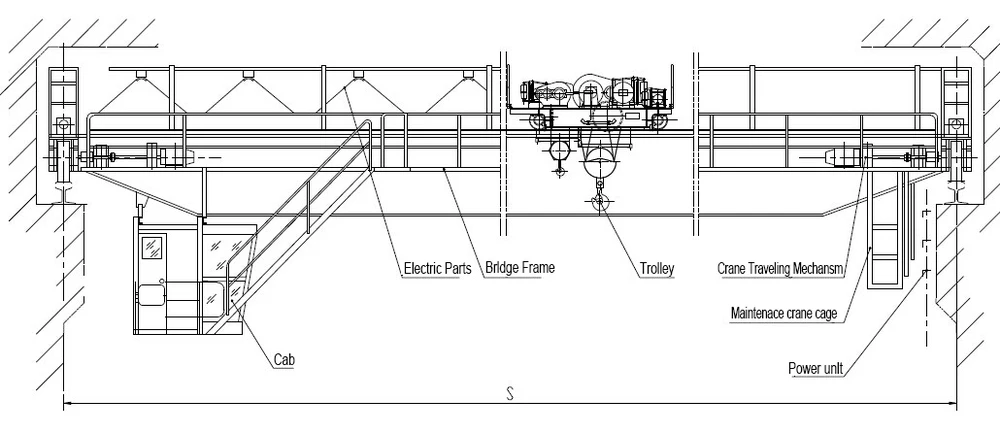
Внутри цеха чаще всего можно увидеть мостовой кран — это кран, состоящий из моста (балки), перемещающейся по крановым путям с помощью ходовых колес, установленных в концевых балках. Балка с каретками (концевыми балками) представляет собой металлоконструкцию крана, на которую монтируют все рабочие механизмы и электрооборудование. Металлоконструкция крана воспринимает нагрузку от собственной массы, массы поднимаемого груза и передает эти усилия на опорные конструкции здания.
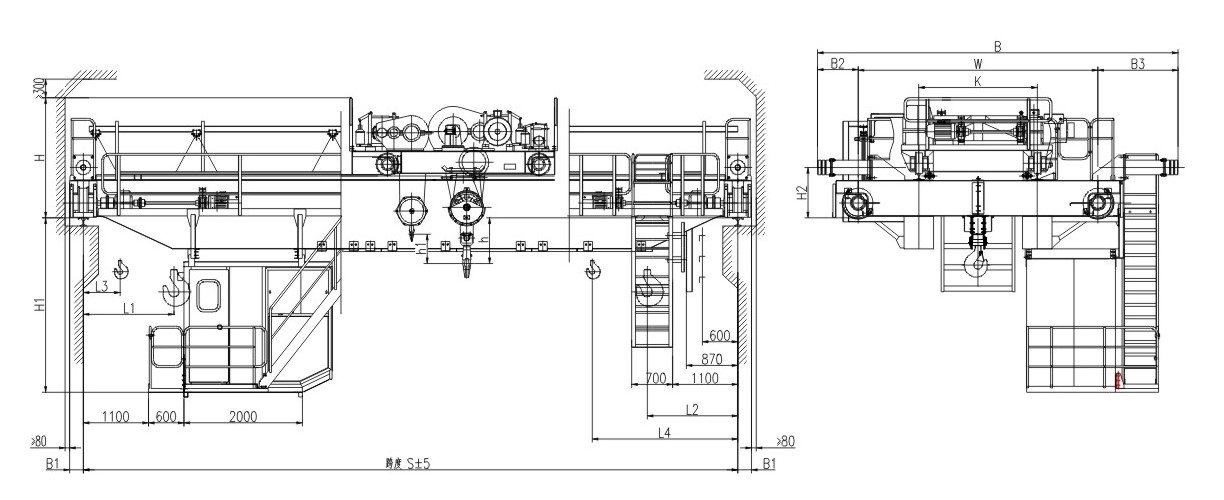
Основными характеристиками мостового крана являются грузоподъемность, длина пролета и высота подъема, прочие характеристики являются второстепенными. Пролет крана — это расстояние по горизонтали между осями рельсов подкранового пути. Высота подъема — это расстояние от грузозахватного органа крана, находящегося в крайнем верхнем положении, до уровня пола.
Наиболее простой конструкцией мостового крана является кран-балка — это облегченный мостовой грузоподъемный кран, основные элементы которого — несущая балка (мост) и тележки (концевые балки). Перемещение крана вдоль кранового пути осуществляется с помощью электродвигателей, или вручную (с помощью редуктора и цепной передачи). Управление электрическим мостовым краном осуществляется с помощью проводного или беспроводного пульта управления (кран-балки с радиоуправлением). Электрические кран-балки несомненно более удобные в работе, однако их стоимость значительно выше крана с ручным приводом, для малых предприятий это один из важнейших факторов, поэтому они часто приобретают кран с ручным передвижением.
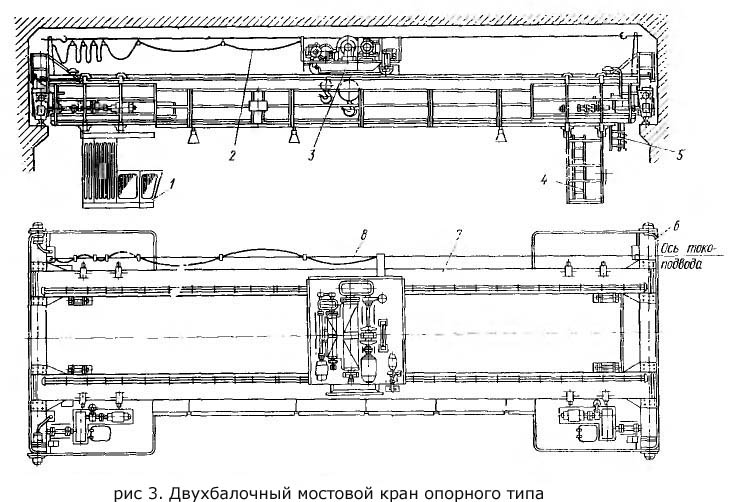
Мостовые краны подразделяются на опорные, подвесные и подвесные двухпролетные. Опорные мостовые краны представляют собой балку, опирающуюся ходовыми каретками на подкрановый путь. В качестве подкранового пути могут использоваться рельсы или квадрат. Конструкция кранов данного типа устойчива, надежна и подходит для интенсивной эксплуатации, однако рабочая область опорного мостового крана и установленной на него тали ограничена расстоянием между рельсами подкранового пути. При большой длине пролета крана (от 22,5м) целесообразнее использовать краны ферменной конструкции для обеспечения большей горизонтальной жесткости металлоконструкции.
Подвесные мостовые краны это легкие металлические конструкции, подвешенные за ходовые каретки и передвигающиеся по крановым путям вдоль рабочей зоны. В качестве кранового пути обычно используются двутавровые балки. Подвесные однопролетные кран-балки изготавливаются пролетом до 15м, если площадь обслуживания крана свыше 15м, то применяются двухпролетные кран-балки. В конструкцию двухпролетного крана входят балка и три подвесные концевые тележки, это позволяет увеличить рабочую область до 24м. Для придания конструкции жесткости, в местах соединения главной и концевых балок устанавливают подкосы.
В конструкцию двухпролетного крана входят балка и три подвесные концевые тележки, это позволяет увеличить рабочую область до 24м. Для придания конструкции жесткости, в местах соединения главной и концевых балок устанавливают подкосы.
Преимуществами подвесных кранов, по отношению к опорным, являются более полное обслуживание всей рабочей зоны, значительно меньшая масса металлоконструкции, возможность использования в более низких помещениях, возможность передачи груза из пролета в пролет посредством стыкования несущих балок.
Разборка деталей и принадлежностей мостового крана
Независимо от того, работаете ли вы в строительной отрасли, автомобильной промышленности или занимаетесь другой деятельностью, требующей подъема тяжелых грузов, использование мостового крана на вашем объекте может обеспечить многочисленные преимущества. Системы мостовых кранов позволяют сотрудникам быстро, легко и безопасно перемещать несколько тонн продукции и оборудования по всему зданию. Существуют различные типы мостовых кранов, подходящие для ваших задач.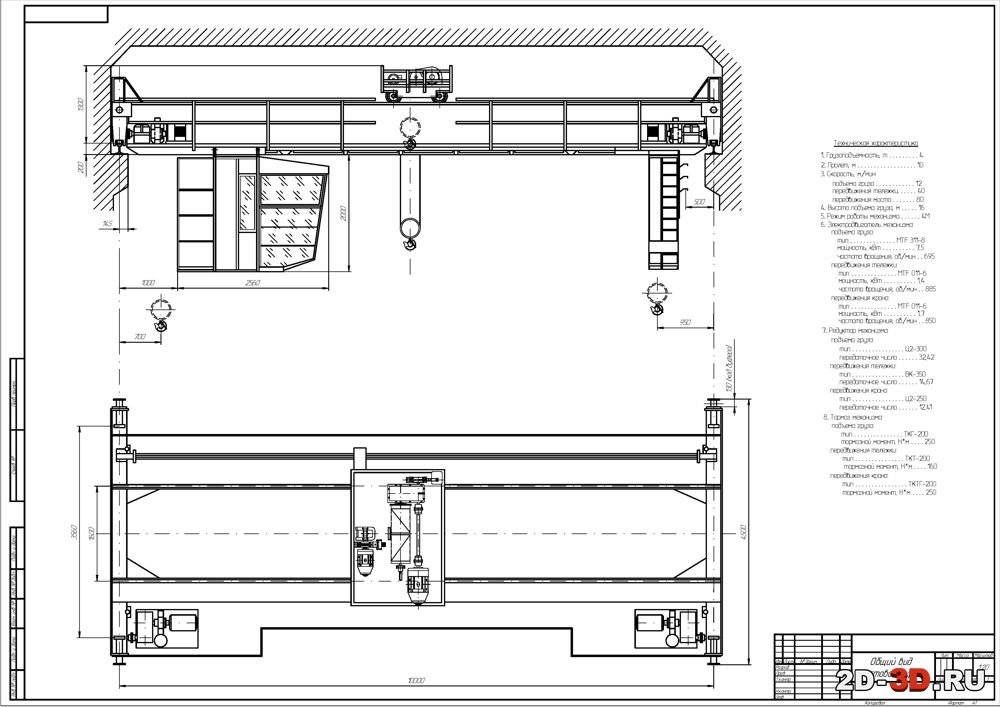
Если вы планируете установить мостовой кран или хотите узнать больше об определенных частях существующей установки, мы составили подробное руководство, которое поможет вам узнать больше о типичных деталях, аксессуарах и компонентах мостового крана. Кроме того, мы рассмотрим несколько моментов о наиболее распространенных типах кранов. Продолжайте читать, чтобы узнать все, что вам следует знать о мостовых кранах.
Что такое мостовой кран?
Как и многие другие виды оборудования, краны бывают разных форм и размеров. Мостовой кран представляет собой систему различных частей, включая рельсовые пути, мосты, подъемники и тележки, для перемещения грузов по объектам. В то время как многие мостовые краны являются стационарными конструкциями, установленными в вашем здании, передвижные мостовые краны также доступны для конкретных применений.
Эта тяжелая техника может перемещать тысячи фунтов продукции. Вместо того, чтобы просить рабочих физически перемещать тяжелые предметы, крановщики могут безопасно транспортировать их без риска перенапряжения или других травм, связанных со стрессом или напряжением.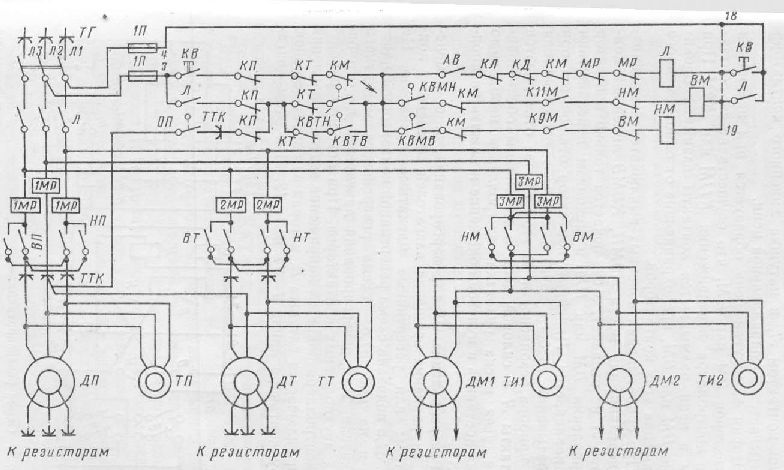 В особо опасных производственных условиях использование мостового крана для перемещения материалов с одного места на другое может значительно снизить опасность на рабочем месте, например разлив химикатов или опрокидывание груза.
В особо опасных производственных условиях использование мостового крана для перемещения материалов с одного места на другое может значительно снизить опасность на рабочем месте, например разлив химикатов или опрокидывание груза.
Несмотря на то, что мостовые краны делают рабочее место более безопасным, вы и ваши сотрудники все же можете столкнуться с опасностями при работе с мостовым краном. В соответствии с правилами OSHA операторы кранов должны соблюдать определенные правила. Например, крановщики никогда не должны покидать свои посты во время работы с краном, даже если они чувствуют, что не могут продолжать выполнение текущей задачи. Работа управляющего предприятием заключается в обеспечении того, чтобы все крановщики были физически и психически пригодны для безопасной эксплуатации системы.
Изучая варианты подвесных мостовых кранов, вы должны учитывать несколько аспектов: вашу типичную грузоподъемность, план вашего объекта, электрическую систему вашего объекта и какие материалы вы будете транспортировать с помощью крана. Таким образом, вы сможете принять наиболее безопасное и логичное решение для вашего здания и сотрудников.
Таким образом, вы сможете принять наиболее безопасное и логичное решение для вашего здания и сотрудников.
Основные детали и компоненты мостового крана
Мостовой кран состоит из множества частей и компонентов. Менеджеру объекта важно знать, что представляет собой каждый компонент и какую функцию он выполняет. Таким образом, вы можете выбрать лучшее оборудование для вашего приложения и избежать дорогостоящего ремонта, серьезных травм и чрезмерных простоев из-за недостатка знаний. Если вы устанавливаете мостовой кран в первый раз, вы должны убедиться, что ваши операторы крана имеют достаточную подготовку по работе каждого компонента.
Ниже вы найдете информацию о каждом типе части оборудования мостового крана.
1. Подъемники и тележки
Подъем и тележка работают вместе для подъема и перемещения грузов. Поскольку подъемник использует канаты или цепи для подъема, опускания и удержания груза, тележка соединяет подъемник с мостом и позволяет ему двигаться горизонтально. В зависимости от типа крана тележка может располагаться сверху или снизу моста. Кроме того, как тали, так и тележки доступны с ручным или механическим приводом. Эти два компонента доставят ваш груз из точки А в точку Б.
В зависимости от типа крана тележка может располагаться сверху или снизу моста. Кроме того, как тали, так и тележки доступны с ручным или механическим приводом. Эти два компонента доставят ваш груз из точки А в точку Б.
2. Мосты
Мост — это компонент, который позволяет перемещать грузы по всей длине вашего объекта. Этот мост поддерживается взлетно-посадочными полосами и включает в себя несколько элементов, позволяющих ему функционировать. Компоненты моста включают:
- Балка моста: Сам мост состоит из одной или двух балок, поддерживаемых на каждом конце двумя взлетно-посадочными полосами.
- Концевые тележки: Концевые тележки подсоединены к обоим концам моста и используют колеса для перемещения по взлетно-посадочным полосам.
- Привод: Привод моста — это дополнительный электрический компонент, обеспечивающий движение моста вперед-назад по взлетно-посадочным полосам.
Мост может иметь одну балку (однобалочный) или две балки (двухбалочный), которые вы можете выбрать в соответствии с вашими потребностями в весе груза. Кроме того, мосты будут различаться по длине в зависимости от потребностей покрытия вашего приложения. Если вы планируете обслуживать мостовые краны по всему объекту, вы можете установить несколько мостов в одной системе.
Кроме того, мосты будут различаться по длине в зависимости от потребностей покрытия вашего приложения. Если вы планируете обслуживать мостовые краны по всему объекту, вы можете установить несколько мостов в одной системе.
3. Подкрановые пути
Подкрановые пути поддерживают мост, который удерживает тележку и подъемник. Подъездные пути построены из балок или закрытых путей, чтобы мост мог перемещаться по всей длине крана. Они установлены по всему вашему объекту, а взлетно-посадочные полосы расположены так, чтобы добраться до каждой области, которую вам нужно покрыть. Когда крановщик поднимает грузы с помощью крана, он может перемещать мост вперед и назад по взлетно-посадочной полосе. Затем они могут переместить тележку и подъемник, чтобы разместить груз в нужном месте.
Эта часть оборудования будет отличаться в зависимости от того, какой тип мостового крана вы устанавливаете. Для приложений с большой грузоподъемностью могут потребоваться мостовые краны с верхним ходом, в которых мост проходит по верхней поверхности балок.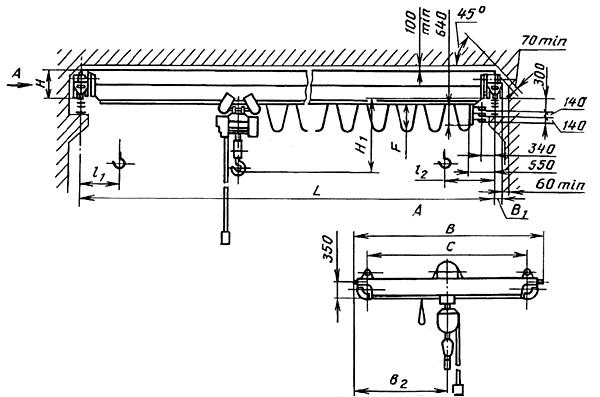 В качестве альтернативы краны с нижним ходом могут быть более подходящими для приложений с низкой высотой подъема.
В качестве альтернативы краны с нижним ходом могут быть более подходящими для приложений с низкой высотой подъема.
4. Колонны
Иногда мостовые краны устанавливаются на потолочную конструкцию здания. Эти системы, известные как потолочные краны, не нуждаются в опорных колоннах. Если ваше здание не может выдержать вес мостового крана, вам придется установить колонны, чтобы обеспечить достаточную поддержку деталей и компонентов крана, а также предполагаемых нагрузок.
Высота колонн вашей системы будет зависеть от ваших требований к высоте подъема и вертикального пространства объекта. Кроме того, количество необходимых вам колонн будет зависеть от размера необходимой вам системы мостового крана. Небольшому мостовому крану может понадобиться всего четыре колонны, но вы можете бесконечно увеличивать охват, добавляя дополнительные колонны.
5. Концевые тележки
Концевые тележки моста позволяют ему скользить вверх и вниз по взлетно-посадочной полосе. Один мост будет иметь по одной концевой тележке на каждом конце. Эти грузовики прикрепляются непосредственно к верхней или нижней части взлетно-посадочной полосы и могут иметь ведущие колеса, помогающие им двигаться вперед и назад. Мостовые краны большей грузоподъемности могут иметь концевые тележки большего размера или использовать несколько концевых тележек для распределения большего веса.
6. Электрическое соединение
Электрические части крана обеспечивают питание. Некоторым мостовым кранам, особенно системам большой грузоподъемности, может потребоваться электроэнергия для моста, лебедок и тележек.
Мостовой кран с электроприводом будет иметь изолированные токопроводящие стержни, ряд кабелей, называемых гирляндами, и блоки питания для подачи питания. В большинстве случаев электрическая система питает несколько компонентов крана. К этим частям относятся:
- Подъемник: Электрические цепные или канатные тали требуют энергии для подъема, опускания и удержания грузов.

- Тележка: Тележка с электроприводом использует электричество для движения вперед и назад по мосту.
- Мост: Если троллейбусу не нужна энергия, то мост может. Электротракторный привод может перемещать как мост, так и груз по взлетно-посадочным полосам.
- Подвесной пульт: Для управления электрическими компонентами оператор крана может использовать подвесной пульт управления, предназначенный для перемещения грузов. Этот контроллер крепится к крану кабелем.

Наличие соответствующей электрической системы, возможно, является наиболее важной частью работы вашего мостового крана. Многие мостовые краны могут работать без электричества, но электричество может повысить эффективность и облегчить жизнь вашим операторам и может быть необходимо в некоторых случаях. Если применимо, перед установкой убедитесь, что электрическая система вашего объекта готова к подключению к мостовому крану.
7.
 Органы управления
Органы управления
Существует несколько способов управления мостовым краном. Мостовой кран с электрическим приводом будет использовать прикрепленный подвесной контроллер, беспроводной пульт дистанционного управления с питанием от батареи или навесную систему управления. Как правило, использование беспроводного пульта дистанционного управления будет самым безопасным вариантом, поскольку крановщики могут управлять краном на расстоянии. В результате они не будут мешать системе во время работы и будут лучше видеть, куда перемещаются грузы.
Если вы хотите оборудовать свою систему мостового крана для совместимости с беспроводным пультом дистанционного управления, вам необходимо установить приемник вместе с другими электрическими частями. Этот аксессуар позволяет беспроводному пульту дистанционного управления связываться с краном. В зависимости от потребностей вашего объекта беспроводной пульт дистанционного управления может иметь кнопки направления для движения вверх и вниз, из стороны в сторону и других движений.
8. Бамперы
Система мостового крана может включать в себя бамперы для уменьшения останавливающего воздействия. Во время установки вы можете разместить бамперы практически в любой точке, где вы хотите ограничить движение моста. Например, размещение бамперов на концах каждого рельса взлетно-посадочной полосы обеспечит более мягкую остановку моста. Если ваша система включает в себя несколько мостов, вы можете использовать бамперы, чтобы разделить их.
Имейте в виду, что вам придется заменять бамперы по мере их износа, чтобы продлить срок службы мостового крана.
9. Колеса
Многочисленные типы колес помогают мостовому крану работать правильно. Как мы уже упоминали, мостовые тележки оснащены колесами, которые обеспечивают плавное движение по взлетно-посадочной полосе. Кроме того, тележка использует колеса для движения вперед и назад по мосту. Это важная часть системы мостового крана, поэтому вы должны следить за тем, чтобы ваши колеса всегда были в рабочем состоянии.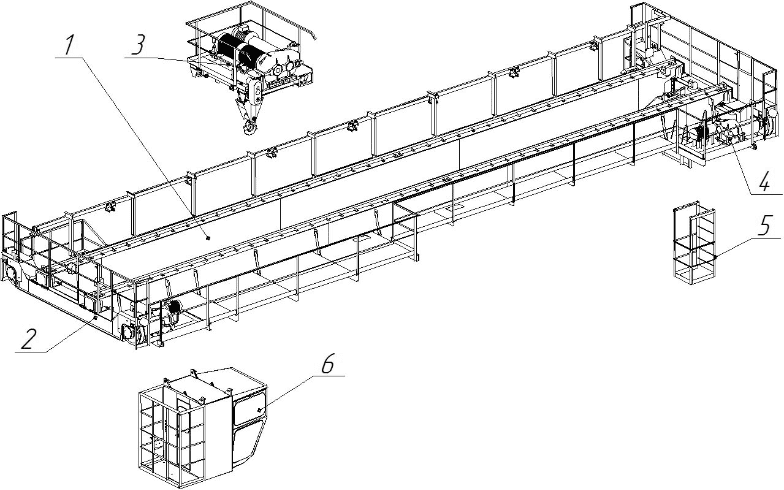
Другие типы мостовых кранов
Мостовые краны обычно используются в различных отраслях и областях. Однако не все приложения лучше всего подходят для мостового крана. Другие мостовые краны предлагают различные устройства и настройки для различных применений. Если вы устанавливаете новый мостовой кран или хотите узнать больше о том, как работает ваш существующий, продолжайте читать, чтобы узнать больше о наиболее распространенных типах мостовых кранов.
Мостовые краны
Как мы уже упоминали, мостовые краны являются очень распространенным типом мостовых кранов. Эти краны устанавливаются внутри производственных помещений, складов и других зданий в качестве капитальных сооружений. Система взлетно-посадочных полос установлена по всему зданию, чтобы обеспечить охват погрузочно-разгрузочных работ в различных местах. Затем к взлетно-посадочным полосам подключаются мосты и концевые тележки. Наконец, устанавливаются подъемники и тележки, а также подключается электрическая система, если она имеется.
Мостовые краны могут использовать однобалочные мосты, построенные из одной балки, или двухбалочные мосты, построенные из двух балок. Как правило, однобалочные мостовые краны идеально подходят для легких и средних условий эксплуатации, например, мостовые краны с закрытыми гусеницами Spanco Workstation с грузоподъемностью 250–4000 фунтов. Двухбалочные мостовые краны обычно используются в приложениях, требующих грузоподъемности 15 тонн или более, или когда требуются более длинные пролеты моста или большая высота крюка.
Козловые краны
Мостовой козловой кран представляет собой фиксированный мост, прикрепленный к двум колоннам с колесами. Вместо того, чтобы перемещаться по взлетно-посадочным полосам, козловой кран работает прямо на земле. Некоторые порталы большой грузоподъемности, например те, которые используются для обработки контейнеров в портах, могут иметь двухбалочный мост поверх колонн, движущихся по рельсам. Как и в случае с мостовыми кранами, система подъема и тележки поднимает, опускает и перемещает груз.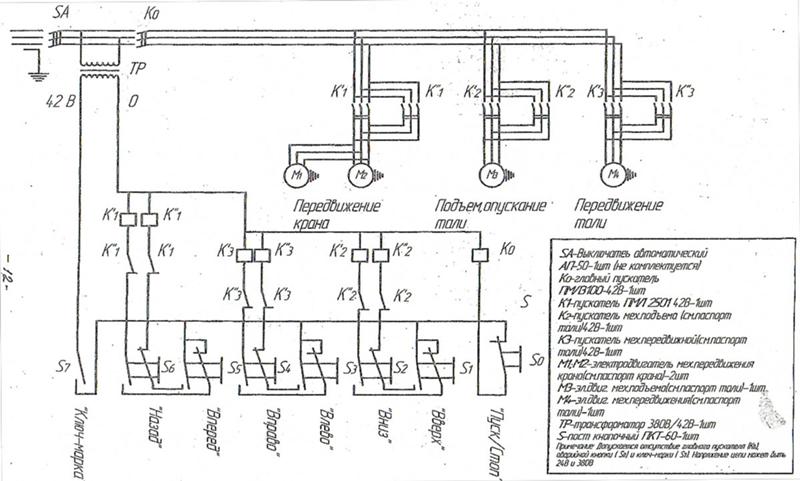
В Spanco мы предлагаем четыре различных типа козловых кранов с различными вариантами, включая регулируемую высоту, монтаж на гусеницах, силовые приводы и многое другое.
Монорельсовые краны
Подобно системе монорельсовых поездов, монорельсовый кран переносит груз по всему объекту на одном подвесном пути. Монорельсовая дорожка крепится к потолку или отдельно стоящей опорной конструкции. В зависимости от длины установки монорельсового крана он может иметь несколько систем подъема и тележки, что позволяет операторам перемещать несколько грузов по пути.
Монорельсовые краны хорошо подходят для задач, требующих перемещения грузов по прямой линии. Многие предприятия, использующие монорельсовые краны, делают это над сборочными линиями. Однако монорельсовые краны также могут включать повороты и переключатели для доступа к рабочим станциям в разных местах. Монорельсовые краны могут даже работать по замкнутому контуру, если это необходимо.
Консольные краны
Консольный кран напоминает перевернутую букву «L». Наиболее важной частью стрелового крана является отдельная балка, известная как стрела, которая поддерживает подъемник и тележку для подъема и перемещения грузов. Стрела также поддерживает любые электрические компоненты, воздушные шланги или другое навесное оборудование. Стрела может поворачиваться на 180 или 360 градусов, что позволяет оператору крана перемещать грузы по полукруглой или полной окружности по мере необходимости.
Наиболее важной частью стрелового крана является отдельная балка, известная как стрела, которая поддерживает подъемник и тележку для подъема и перемещения грузов. Стрела также поддерживает любые электрические компоненты, воздушные шланги или другое навесное оборудование. Стрела может поворачиваться на 180 или 360 градусов, что позволяет оператору крана перемещать грузы по полукруглой или полной окружности по мере необходимости.
Spanco предлагает стреловые краны грузоподъемностью до 15 тонн. Эти системы идеально подходят для приложений, требующих от операторов перемещения грузов на короткие расстояния. Если вашему объекту нужна высоконадежная крановая система и вам не нужно перемещать грузы на большие расстояния, стреловой кран может быть правильным вариантом.
Просмотрите список наших систем и свяжитесь с нами, чтобы узнать больше
Spanco производит высококачественные мостовые краны и оборудование для погрузочно-разгрузочных работ для компаний в США, Канаде и Мексике. Сварщики Spanco сертифицированы Американским обществом сварщиков (AWS), поэтому вы можете быть уверены, что получаете надежную высококачественную продукцию, которая сделает работу вашего предприятия более рациональной и эффективной. Имея производственные мощности Spanco на обоих побережьях, вы можете быстро получить необходимое вам оборудование.
Сварщики Spanco сертифицированы Американским обществом сварщиков (AWS), поэтому вы можете быть уверены, что получаете надежную высококачественную продукцию, которая сделает работу вашего предприятия более рациональной и эффективной. Имея производственные мощности Spanco на обоих побережьях, вы можете быстро получить необходимое вам оборудование.
Вы не уверены, какой мостовой кран вам нужен? Воспользуйтесь нашим средством выбора системы, чтобы найти вариант, наиболее подходящий для ваших нужд. Выберите нужные вам опции и функции, такие как тип перемещения и грузоподъемность, и средство выбора системы определит, какая из наших крановых систем предлагает наилучшее решение. Не стесняйтесь использовать его несколько раз, пока не найдете конфигурацию, которая лучше всего подходит для вас.
Если вы предпочитаете ознакомиться с наличием запчастей и компонентов, дополнительных аксессуаров и комплектных крановых систем, вы можете ознакомиться с полной линейкой нашей продукции. Для получения дополнительной помощи заполните нашу контактную форму, и один из наших представителей свяжется с вами. Позвольте Spanco стать вашим поставщиком качественного и надежного погрузочно-разгрузочного оборудования и запасных частей.
Позвольте Spanco стать вашим поставщиком качественного и надежного погрузочно-разгрузочного оборудования и запасных частей.
[PDF] Нечеткая схема управления положением козлового крана и контролем поворота груза
- Идентификатор корпуса: 56309358
title={Нечеткая схема управления положением козлового крана и управлением поворотом груза},
автор = {Тончи Попадич, Фетах Колонич и Ален Польюган},
год = {2006}
} - Tonci Popadic, F. Kolonic, A. Poljugan
- Опубликовано в 2006 г.
- Engineering
Минимизация времени передачи груза и угла поворота груза в крановых приложениях противоречит требованиям управления и требует надлежащего управления. В данной работе предлагается схема нечеткого позиционирования и противораскачивания для управления козловым краном. Чтобы управлять четырьмя системными переменными, многопараметрический нечеткий контроллер крана разработан с использованием коэффициентов линейно-квадратичного (LQ) контроллера крана. Нечеткий регулятор был протестирован и сравнен с регулятором LQ в…
Нечеткий регулятор был протестирован и сравнен с регулятором LQ в…
bib.irb.hr
Проект системы управления козловым краном на основе теории управления H∞
В данной статье описана процедура проектирования робастного контроллера на основе теории управления H∞ для поступательной мехатронной системы тележки с маятником. Цель состоит в том, чтобы обеспечить быстрое позиционирование тележки с помощью…
Оптимальный дизайн контроллера с обратной связью по состоянию для вращательной электромеханической системы
- Игорь Растич, Ф. Колонич, А. Польюган
Инжиниринг
- 2007
Чтобы свести к минимуму время работы крана, необходимо обеспечить быстрое позиционирование груза с минимальным раскачиванием груза. Это противоречивое требование управления требует надлежащего управления…
Нелинейное прогнозирующее управление башенным краном с использованием подхода формирования эталона
В этой статье предлагается нелинейное модельно-прогностическое управление башенным краном на основе формирования эталона. Контроллер MPC используется для расчета оптимального задания для внутреннего контура управления башни…
Контроллер MPC используется для расчета оптимального задания для внутреннего контура управления башни…
Самомасштабирующийся лабораторный кран нечеткой логики с регулированием против раскачивания
- Аксёнов А., Водовозов В., Петленков Е.
Информатика
2016 57-я Международная научная конференция по энергетике и электротехнике Рижского технического университета (RTUCON)
- 2016
Предложен адаптивный контроллер с нечеткой логикой для позиционирования крана по пяти осям, включающий процедуру самомасштабирования с регулированием против раскачивания, исключающий одну из самых трудоемких и дорогостоящих частей крана система контроля.
Трехмерное моделирование кранов и управление ими с использованием пространственно-пространственного подхода Эйлера-Лагранжа и антисвинговой нечеткой логики
- Аксёнов А.В., Водовозов В.В., Петленков Е.В. построена математическая модель трехмерного крана с использованием подхода Эйлера-Лагранжа. Представление производной модели в пространстве состояний предложено и исследовано в…
Нелинейное моделирование и надежное нечеткое управление LMI системами мостовых кранов
- К. Агиар, Д. Лейте, Д. Перейра, Г. Андоновски, И. Шкрянц
Инженерное дело
Дж. Франкл. Инст.
- 2021
Компенсация трения модели козлового крана на основе нейронного компенсатора с B-шлицами
Быстрое и точное позиционирование и минимизация раскачивания контейнеров и других нагрузок при манипулировании краном являются сложными и в то же время противоречивыми задачами. Для точного позиционирования основной…
Предиктивный контроль в режиме реального времени 3D башенного крана
Предложена модель прогнозирующего управления (MPC) в режиме реального времени для трехмерного башенного крана, основанная на последовательном решении трех квадратичных программ, а асимптотическая устойчивость обеспечивается за счет использования двухрежимной стратегии MPC.
Управление вращающимся маятником на основе трансформации TP
Подход к управлению нелинейными системами применяется к управлению поворотным маятниковым порталом, а алгоритм управления LMI, полученный для обоих положений, объединяется с использованием алгоритма самовозводящегося управления и тестируется в реальной экспериментальной установке.
Тензорный продукт управления процессом Single Pendulum Gantry со стабильной компенсацией трения на основе нейронной сети
Быстрое и точное позиционирование и минимизация раскачивания контейнеров и других нагрузок при манипулировании краном являются сложными и в то же время противоречивыми задачами. Для точного позиционирования основной…
ПОКАЗАНЫ 1-10 ИЗ 10 ССЫЛОК
Новое нечетко-логическое управление противораскачиванием для промышленных трехмерных мостовых кранов мостовой кран, гарантирующий точный контроль положения крана и длины каната, а также оперативное гашение раскачивания груза для одновременного перемещения траверсы и подъемных движений крана.
Об устойчивости системы нечеткого управления мостовым краном
В данной статье представлен анализ устойчивости системы нечеткого логического управления (FLC) тележки мостового крана. Предлагаемая система управления имеет две независимые петли обратной связи: обычная…
Демпфирование колебаний груза в мостовых кранах методом скользящего режима
В данной статье предлагается простая схема управления, основанная на скользящих режимах второго порядка, которая доказала свою эффективность также в случае плохого знания динамики и/или параметров системы и был протестирован на лабораторной модели мостового крана.
Предложение двухэтапного нечеткого управления мостовым краном на основе ГА
- Лю Дянтонг, Дж. Йи, М. Тан
Инженерия, информатика
2002 Конференция IEEE Region 10 по компьютерам, коммуникациям, управлению и энергетике Инжиниринг. ТЕНКОМ ’02. Труды.
- 2002
Двухступенчатый нечеткий контроллер на основе генетического алгоритма (GA) предлагается для мостового крана, чтобы обеспечить точность позиционирования, минимизировать время транспортировки и угол поворота, а также демпфирующий угол поворота в заданном положении.
Система предотвращения раскачивания и контроля положения крановой системы
Новая система управления краном, которая имеет функцию точного контроля положения с защитой от раскачивания подвешенного объекта и основана на простом методе контроля импеданса.
Оценка эффективности оптимального управления козловым краном
- Zhonghua Wang, B. Surgenor
Инженерное дело
- 2003
Для управления козловым краном необходима оптимальная скорость движения тележки. быть максимальным, а раскачивание подвешенной полезной нагрузки — минимальным. Проблема естественно поддается…
Реализация нечеткого антираскачивающего управления для интеллектуальной крановой системы на основе поведения
- Jiaming Wang, Hao Li, F. Karray, O. Basir
Computer Science
Proceedings 2003 IEEE/RSJ International Conference on Intelligent Роботы и системы (IROS 2003) (Cat. No.03Ch47453)
- 2003
Представлена нечеткая схема управления для минимизации колебаний груза для крановых систем при сохранении непрерывной транспортировки полезной нагрузки, которая показывает, что система остается стабильной при нескольких режимах работы.
 Представление производной модели в пространстве состояний предложено и исследовано в…
Представление производной модели в пространстве состояний предложено и исследовано в…