

Содержание
Электрическая схема мостового крана
Главная » Схемы и книги
На чтение 2 мин. Просмотров 11.6k.
На многих производствах, на складах, в магазинах для поднятия и перенесения грузов используются краны мостовые электрические.
Принципы их работы можно отследить с помощью электрической схемы – специального чертежа, отражающего электрические соединения и направление движения тока, а также работу отдельных участков цепи.
Мостовые краны имеют различные конструкции и назначения. Однако при составлении схем обязательно учитываются возможности защиты механизма от перегрузок и перепадов напряжения, варианты обратного хода тока, способы автоматического торможения, и отключения двигателя при остановке.
Жирными линиями выделяются основные линии тока (силовые цепи электродвигателя), а тонкими – вспомогательные направления (управление механизмом).
Составление электрических схем происходит для кранов, находящихся в нормальном (без напряжения и при отсутствии внешних воздействий), состоянии system.
Электрическая схема 4-х двигательного мостового крана
Существуют специальные символы, характеризующие тот или иной объект или узел на электрической схеме.
Например, барабанные контроллеры представляются в виде развёрток, подвижные контакты отображаются прямоугольниками, неподвижные элементы – закрашенными кружочками, а положение контроллеров задаётся параллельными линиями с надписанными сверху цифрами.
Схема мостового крана электрического (управление с пола)
Как правило, электрические схемы указывают соединения компонентов, но не передают пропорциональность их расположения.
Обязательно посмотрите видео – в нем кратко и понятно все обьясняется:
Схема кран–балки показывает энергораспределение питания на узлы подъемного устройства
Электродвигателями талей и кран-балок управляют с помощью реверсивных магнитных пускателей и пусковых кнопок, подвешиваемых на гибком бронированном кабеле. Напряжение к катушкам и контактам контакторов подъема КМ1 (см. рисунок выше), спуска КМ2, передвижения вперед КМЗ и вспять КМ4 подводится через автоматический выключатель и кабель либо контактные провода. Движение подъемного устройства ввысь ограничивает конечный выключатель SQ.
Блокировка реверсивных контакторов движков от одновременного включения осуществляется двухцепными клавишами и механической блокировкой самих контакторов (либо размыкающими блок-контактами контакторов).
Кинематическая схема мостового крана, схема механизма подъема
Кинематическая схема мостового крана позволяет понять принципы работы всех крановых узлов и механизмов. В целом принцип работы всего подъемно-транспортного оборудования одинаков: основой является одна или две металлических балки, на которых размещена грузовая лебедка, приводимая в движение электрическим двигателем.
Вид кранового оборудования зависит от типа конструкции и специфики поднимаемых грузов. Однако стоит отметить, что основные узлы грузоподъемных механизмов аналогичны.
Общая кинематическая схема мостового крана
Рис. 1. Кинематическая схема механизма передвижения мостового крана
На рисунке 1 представлена типовая кинематическая схема кранового механизма, включающая:
- Электродвигатель (чаще всего используются асинхронные трехфазные двигатели).
- Тормоз – обеспечивает остановку и фиксацию перемещаемого груза в любом положении.
- Редуктор – понижает количество оборотов двигателя.
- Барабан – служит для равномерного натяжения крановых тросов.
- Полиспаст – одинарый или обойма из нескольких блоков, обеспечивающих эффективное распределение энергии от привода и выигрыш в скорости и силе.
- Крюк – устройство для захвата груза.
Буферные устройства
Схемы расположения и конструкция буферных устройств
Для повышения безопасности эксплуатации мостового крана в случае внезапного выхода из строя концевых выключателей или тормозов используются упругие буферные устройства. Они служат для смягчения возможных ударов кранового моста или грузовой тележки о концевые упоры при наезде на них или друг о друга при столкновении.
По своей конструкции буферные устройства делятся на гидравлические, фрикционные, пружинные и резиновые; могут устанавливаться на подвижных (грузовая тележка или концевые балки кранового моста) или неподвижных (концы крановых путей) элементах. Буферы гасят энергию при резкой остановке, снижают ударные и динамические нагрузки, возникающие при столкновении.
Буферы гасят энергию при резкой остановке, снижают ударные и динамические нагрузки, возникающие при столкновении.
Кинематическая схема механизма передвижения мостового крана
Рис. 2. Схема трансмиссии крана с индивидуальным приводом
Механизм движения крана может быть центральным или индивидуальным. В свою очередь центральное перемещение подразделяется на два вида: с быстроходным и тихоходным трансмиссионным валом.
Рис. 3. Кинематическая схема передвижения мостового крана с тихоходной трансмиссией
Привод крана с тихоходной трансмиссией устанавливается в середине моста и включает: двигатель 3, муфты-тормоза 2 и редуктор 1. Выходной вал редуктора связывается с валом трансмиссии 4, изготовлен из сборных секций, которые соединяются муфтами 5, установленными в подшипниках. Также муфты соединяют трансмиссионный вал с приводом ходовых колес 7, используя зубчатую передачу 6. Вал 4 вращается с той же скоростью, что и колеса, передавая максимальный крутящий момент.
Также муфты соединяют трансмиссионный вал с приводом ходовых колес 7, используя зубчатую передачу 6. Вал 4 вращается с той же скоростью, что и колеса, передавая максимальный крутящий момент.
Дополнительные устройства и приборы безопасности
Мостовые краны, работающие вне помещения, оборудуются анемометрами, измеряющими силу ветра и подающими сигнал о необходимости прекращения погрузочных работ, если сила ветра превышает допустимый уровень. Кроме того, краны на открытых эстакадах могут снабжаться противоугонными захватами. Подобные захваты, выполненные в виде клещей или блокирующих ходовые колеса остановов, исключат перемещение находящегося в неработающем состоянии крана или его тележки под воздействием сильного напора ветра.
На всех кранах мостового типа в обязательном порядке устанавливается звуковая сигнализация (электрические звонки или сирены). С ее помощью находящиеся в цеху рабочие оповещаются о повышенной опасности, возникающей при работе крана.
Световая и звуковая сигнализация в кабине машиниста крана служит для информирования о возможных неисправностях крана или об опасных зонах (приближение к концевым упорам или к соседнему крану). Главные троллеи крана оснащаются световой сигнализацией (красными лампами), показывающей наличие на них напряжения.
Главные троллеи крана оснащаются световой сигнализацией (красными лампами), показывающей наличие на них напряжения.
Кинематическая схема механизма подъема мостового крана
В крановых конструкциях мостового типа грузоподъемный механизм размещается на грузовой тележке. Количество устройств для подъема зависит от максимального веса груза, который способна поднять машина.
Схема подъема подъемно-транспортного оборудования зависит от ряда факторов: типа захватного устройства, высоты и массы поднимаемого груза, длины пролета. При использовании крюка, грейфера или электромагнита используется один подъемный механизм.
Рис. 4. Кинематическая схема подъема мостового крана с крюком
Обозначения на рисунке:
- Двигатель
- Муфта
- Тормоз
- Редуктор
- Барабан
- Полиспаст
- Неподвижный блок полиспасты
Для подъема в кранах применяются нормальные и укороченные крюковые подвесы.
Механизмы подъема и захвата груза
Механизм подъема груза разработан из гибкого подъемного органа (часто – стального каната) и грузовой однобарабанной или двухбарабанной лебедки.
Непосредственно к канату или через нижнюю обойму полиспаста крепятся грузовой крюк или разные грузозахватные устройства, которые могут действовать автоматически.
Например, пневматические присосы, подъемные электромагниты, грейферы, клещевые захваты и т.п. (П.к., соответственно, называются крюковыми, грейферными, клещевыми, магнитными, контейнерными и т.д.).
Если есть необходимость иметь несколько ступеней скорости подъема (скажем, посадочную, высокую для грузов с малой массой) используют многоскоростные лебедки.
В ситуациях, когда необходима особенно большая точность в работе в технологических операциях (например, в каких-либо металлургических мостовых кранах), а также во время штабелирования грузов используют жесткий подвес.
В таком случае грузозахватное устройство крепится к штанге, которая двигается по вертикальным направляющим. Жесткий подвес целиком препятствует раскачиванию груза, тем не менее, достаточно утяжеляет кран.
Для того чтобы обеспечить безопасность работы, механизмы подъема должны снабжаться ограничителями хода грузозахватного устройства, ограничителями грузового момента или грузоподъемности.
У некоторых подъемных кранов есть крановые весы, который действуют автоматически. Они позволяют определить массу груза, который поднимается.
Кинематическая схема тележки мостового крана
Рис. 5. Кинетическая схема тележки
Грузовая тележка отвечает за подъем и перемещение рабочего органа крана. Они конструируются с расчетом для использования как на однобалочных, так и на двухбалочных конструкциях.
На схеме с рисунка 5 показано принцип перемещения тележки. Электрический двигатель 1 передает крутящий момент на приводные колеса 11 через муфты 2,8,9,10. Для снижения количества оборотов предназначены зубчатые колесами с косыми зубьями 3-6. Тормоз 7 блокирует передачу крутящего момента и останавливает тележку.
Важность чтения кинематической схемы подчеркивается тем, что ее чтение обязательно для всех студентов направления «Подъемно-транспортные машины и оборудование». Проектирование и расчет кранов и написание курсовой работы невозможно без понимания принципов работы механизма.
Проектирование и расчет кранов и написание курсовой работы невозможно без понимания принципов работы механизма.
Какие условия для работы машиниста создаются в кабине управления?
Любое оборудование, для управления которым требуется оператор или машинист, обязательно обеспечивают соответствующими устройствами, сконструированными в соответствии с правилами безопасности и обеспечивающими комфортную работу.
Кабина управления оборудуется всем необходимым для комфортных условий работы крановщика
Управление мостовым краном из кабины осуществляется машинистом из сидячего положения, для чего внутри устанавливается удобное кресло. Все датчики, переключатели и пульты управления располагаются на удобном расстоянии. Крановщик, находясь в кабине, располагает всем необходимым оборудованием для управления любыми узлами и подвижными механизмами машины, а так же специальными средствами связи с другими сотрудниками (особенно в закрытых кабинах).
Поскольку кабина устанавливается на балку моста, существует такая проблема, как вибрация. Решение ее кроется в уникальной технологии установки механизма передвижения, обеспечивающей плавное перемещение кабины по путям. Установка специальных прокладок и применение качественных смазочных материалов избавляет машиниста от неприятных ощущений из-за вибрации.
Решение ее кроется в уникальной технологии установки механизма передвижения, обеспечивающей плавное перемещение кабины по путям. Установка специальных прокладок и применение качественных смазочных материалов избавляет машиниста от неприятных ощущений из-за вибрации.
Наиболее важным фактором для эффективной работы крановщика является обзор. Хороший обзор обеспечивает полный контроль за всеми рабочими операциями и позволяет своевременно реагировать на возникшие неполадки. Окна в кабине управления, как правило, имеют большие размеры, а панорамные кабины устроены так, что обзор обеспечивается на 360 градусов.
Осуществление управления мостовым краном из кабины машиниста особенно удобно для оборудования с большим пролетом, а так же, например, для кранов специального назначения, осуществляющих работу с грузами, требующими повышенной точности и аккуратности.
- < Назад
- Вперёд >
Типы кабин
а) Открытая кабина б) Закрытая кабина
В зависимости от того, каковы условия эксплуатации крана, кабину могут сделать открытой или закрытой.
Первый тип кабин (открытые) предназначен для кранов, которые преимущественно работают в закрытых помещениях с температурой +10…+28. Закрытые кабины нужны для кранов, работающих при +40…+60. Если температура окружающей среды ниже +10, то кабины оснащаются отопительными приборами, а если температуры свыше +28 – кондиционерами.
Как должна выглядеть кабина по ГОСТу
Внутренняя высота кабины выполняется в размере не меньшем 1,8 метров, а ее желательные минимальные длина и ширина – соответственно 2 метра и 1,1 метра.
Важно, чтобы размеры сохранялись минимальными. Но также важно учесть, что от стесненного помещения работник будет уставать быстрее, поэтому ему нужно пространство, чтобы периодически он мог выпрямиться и расслабить мышцы.
Площадь кабины должна обеспечивать свободный доступ к оборудованиям и давать возможность находиться в ней как крановщику, так и еще одному человеку (это может быть слесарь, стажер).
Внешний вид кабины мостового крана. Производитель: ООО “Подъемтрансмаш”
Производитель: ООО “Подъемтрансмаш”
Расположение кабины в кране должно быть таким, чтобы сидя в кресле, крановщик мог вести наблюдение за грузом и крюковой подвеской на протяжении всего времени работы крана. Важно, чтобы углы зрения, считая от плоскостей, которые проведены от уровня глаз, были от горизонтальной к верху – 60 градусов, к низу – 90 градусов; от вертикальной – 135 градусов в обе стороны.
Кабины открытого типа должны быть со сплошным ограждением со всех сторон с высотой не меньше 1 метра. Ограждение может быть сделано из прочного прозрачного материала (скажем, сталинита), который хорошо противостоит механическим ударам. Остекляя закрытые кабины безосколочным стеклом в стороне обзора, важно учитывать один типоразмер стекол.
Расположение и количество фрамуг, которые удерживаются в открытом или закрытом положениях, должны осуществлять возможность выполнять протирку поверхностей стекол снаружи из кабины. Остекление кабин кранов, которые работают на открытом воздухе, предполагают солнцезащитные щитки. Те кабины, которые подвешены к тележкам, должны иметь зеркала для наблюдения заднего плана. Нижние стекла, на которые стает крановщик, должны защищаться решетками.
Те кабины, которые подвешены к тележкам, должны иметь зеркала для наблюдения заднего плана. Нижние стекла, на которые стает крановщик, должны защищаться решетками.
Дверь в кабину изготовляется раздвижной или распашной, причем вторая должна открывать во внутрь кабины. Размер дверного проема должен быть не меньше 1,8 на 0,5 метров и обязательно герметичным (для воспрепятствования влаги и пыли).
Размещенная под галереей моста, кабина должна сообщаться с лестницей. В подвешенной к тележке кабине вход допускается через наружное ограждение лестницы или настил тележки. Пол в кабине выполняют в виде деревянного настила или иного металлического настила, покрывается ковриком из резины.
Размер коврика должен быть не меньше 0,5 на 0,7 метров. Укладывать их нужно исключительно в местах обслуживания электрооборудования. Внутренняя облицовка стен делается из хорошо моющихся светлых материалов. Освещение кабины выполняют с помощью лампы с матовым плафоном, которые исключает блики на остеклении.
Утройство кабины мостовых кран-балок
У панорамной кабины форма восьмигранной пирамиды или усеченного конуса, подвешивается кабина к мосту за проушины, которые прикрепляются на ее верхнем поясе. Через катки на нижнем поясе опирается платформа с креслом-пультом на ней. Платформа (или в отдельных случаях кресло) совершает поворот на 90 градусов в обе стороны крановщиком с помощью отталкивания руки или ноги от ограждения кабины. Платформа каждые 30 градусов фиксируется приводом от педали. Ток к пульту поступает через гибкий кабель, который располагается под дном кабины. Вход расположен сбоку или сверху.
Схема управления формированием входных данных с применением на мостовых кранах
[1] H. Butler, G. Honderd and J. Van Amerongen, Справочная модель адаптивного управления масштабной моделью козлового крана, IEEE Control Syst. 11 (1) (1991), 57–62.10.1109/37.103358Поиск в Google Scholar подавление раскачивания груза только горизонтальным движением стрелы, Мехатроника 23 (8) (2013), 1223–1236. 10.1016/j.mechatronics.2013.09.001Search in Google Scholar
10.1016/j.mechatronics.2013.09.001Search in Google Scholar
[3] A. Gholabi, M. Ebrahimi, G.R. Yousefi, M. Ghayour, A. Ebrahimi and H. Jali, Бессенсорное противоповоротное управление мостовым краном с использованием измерений напряжения и тока, J. Vib . Control 21 (9) (2015), 1745–1756.10.1177/1077546313500367Search in Google Scholar
[4] R.R. Orszulik and J. Shan, Управление вибрацией с использованием входного формирования и адаптивной положительной обратной связи по положению, J. Guid. Контроль дин. 34 (4) (2011), 1031.10.2514/1.52287Поиск в Google Scholar
[5] Эйхаб М. Абдель-Рахман, Али Х. Найфех и Зияд Н. Масуд, Динамика и управление кранами: обзор, Modal Anal . 9 (7) (2003), 863–908.10.1177/107754630300
07Search in Google Scholar
[6] Ning Sun, Yiming Wu, Yongchun Fang and He Chen. неопределенные параметры: проектирование и эксперименты, IEEE Trans Trans. автомат. науч. англ. 15 (3) (2018), 1413–1422.10.1109/TASE.2017.2723539Search in Google Scholar
англ. 15 (3) (2018), 1413–1422.10.1109/TASE.2017.2723539Search in Google Scholar
[7] Н. Сун, Ю. Фанг, Ю. Ву и Х. Чен, «Адаптивное позиционирование и управление подавлением раскачивания малоприводных кранов, демонстрирующих двойную маятниковую динамику: теория и эксперименты», in Proceedings — 2016 31-я молодежная ежегодная конференция Китайской ассоциации автоматизации, YAC 2016, 2017.10.1109/YAC.2016.7804870Search in Google Scholar
[8] Ning Sun, Yongchun Fang, He Chen, Yiming Fu and Biao Lu, Nonlinear Стабилизирующее управление судовыми кранами при бортовой качке и вертикальной качке: проектирование, анализ и эксперименты, IEEE Trans. Сист. Человек Киберн. Сист . 9 (2017), 1–13.10.1109/TSMC.2017.2700393Поиск в Google Scholar
[9] Нин Сун, Тонг Ян, Хе Чен, Юнчун Фан и Южэ Цянь, Адаптивное управление позиционированием и предотвращением раскачивания для 4- Поворотные краны DOF с неопределенными/неизвестными параметрами при аппаратных экспериментах, IEEE Trans.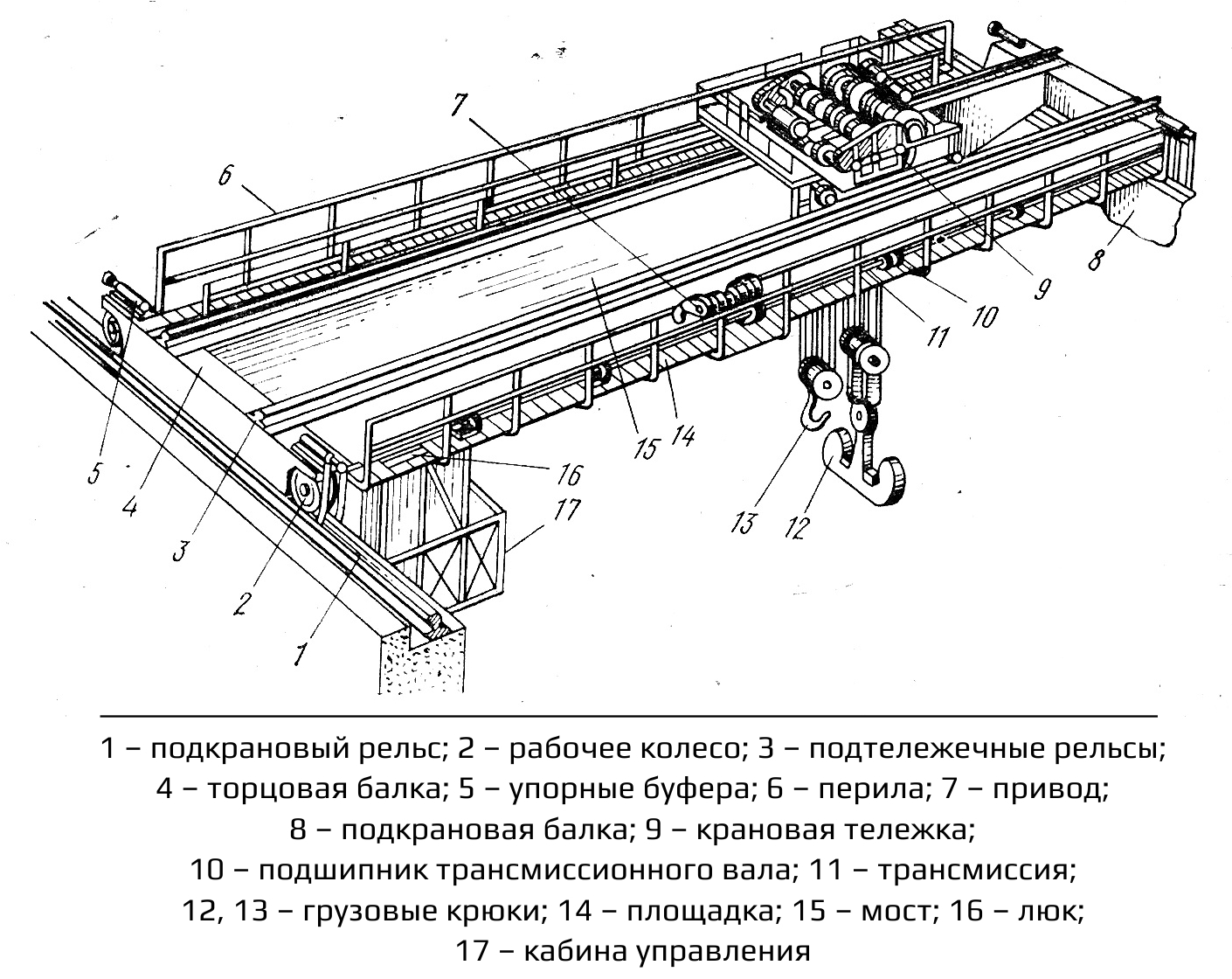 Сист. Человек Киберн. Сист . 99 (2017), 1–13.10.1109/TSMC.2017.2765183Search in Google Scholar
Сист. Человек Киберн. Сист . 99 (2017), 1–13.10.1109/TSMC.2017.2765183Search in Google Scholar
[10] He Chen, Yongchun Fang and Ning Sun, Стратегия планирования оптимальной по времени траектории с ограничением поворота для двойных маятниковых крановых систем, Нелинейная Дин . 89 (2) (2017), 1513–1524.10.1007/s11071-017-3531-0Поиск в Google Scholar
[11] Мэнхуа Чжан, Синь Ма, Хуэй Чай, Сюэвен Жун, Синьчэн Тянь и Ибинь Лим, А новый онлайн-метод планирования движения для мостовых кранов с двойным маятником, Nonlinear Dyn . 85 (2) (2016), 1079–1090.10.1007/s11071-016-2745-xПоиск в Google Scholar
[12] Туан Ань Ле, Сун-Гыл Ли и Санг-Чан Мун, Частичная линеаризация с обратной связью и скольжение приемы режимов для 2D управления краном, Пер. Инст. Изм. Контроль . 36 (1) (2014), 78–87.10.1177/0142331213492369Поиск в Google Scholar
[13] Н. К. Сингер, В.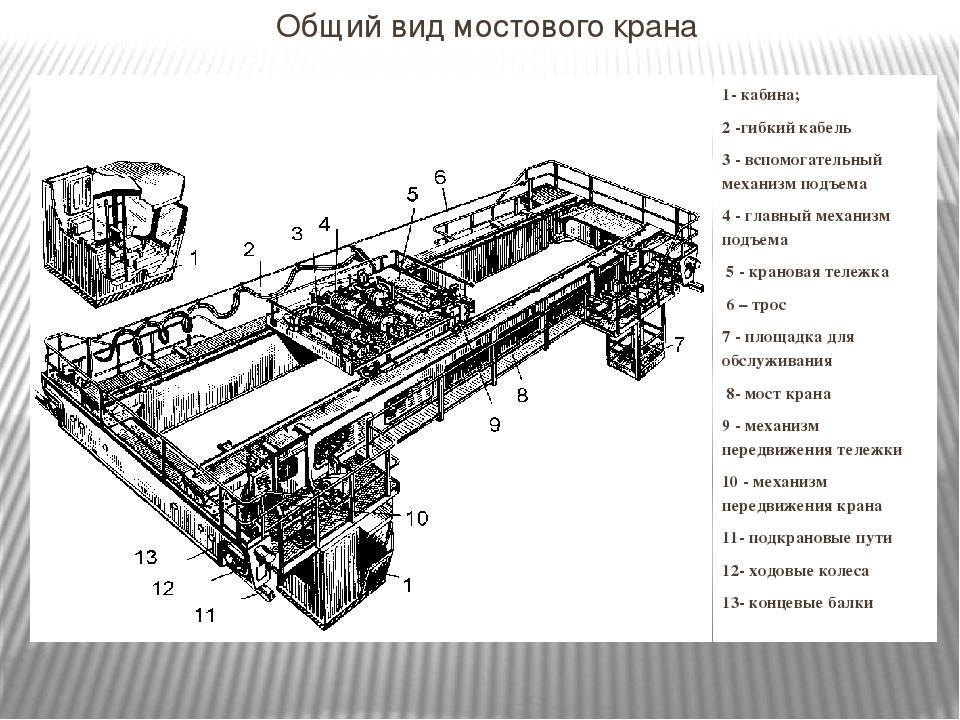 П. Сиринг и К. А. Паш, Формирование ввода команд для минимизации нежелательной динамики, Патенты Google, апрель 1990 г. Поиск в Google Scholar
П. Сиринг и К. А. Паш, Формирование ввода команд для минимизации нежелательной динамики, Патенты Google, апрель 1990 г. Поиск в Google Scholar
[14] WE Singhose, NC Singer, SJ Derezinski, III, BW Rappole, Jr и K. Pasch, Метод и устройство для минимизации нежелательной динамики в физической системе, Патенты Google, июнь 1997 г. Поиск в Google Ученый
[15] J. Vaughan, A. Yano и W. Singhose, Сравнение надежных входных формирователей, J. Sound Vib. 315 (4) (2008), 797–815.10.1016/j.jsv.2008.02.032Search in Google Scholar
[16] С. Мориясу и Ю. Окуяма. мотор, IEEJ Trans. инд. заявл. 119 (4) (1999), 508–514.10.1541/ieejias.119.508Search in Google Scholar
[17] С. Огасавара и Х. Акаги, Моделирование и демпфирование высокочастотных токов утечки в ШИМ с инверторным питанием Системы привода переменного тока, IEEE Trans. инд. заявл. 32 (5) (1996), 1105–1114.10.1109/28.536872Поиск в Google Scholar
[18] А. Наранг, Б. К. Гупта, Э. П. Дик и Д. Шарма, Измерение и анализ распределения перенапряжения в обмотках статора двигателя , IEEE Trans. Преобразование энергии. 4 (1) (1989), 126–134.10.1109/60.23163Поиск в Google Scholar
Наранг, Б. К. Гупта, Э. П. Дик и Д. Шарма, Измерение и анализ распределения перенапряжения в обмотках статора двигателя , IEEE Trans. Преобразование энергии. 4 (1) (1989), 126–134.10.1109/60.23163Поиск в Google Scholar
[19] К. Альхазза и З. Масуд, Новый формирователь сигналов для мостовых кранов, J. Eng. Рез. 1 (3) (2013), 181–209. Поиск в Google Scholar
[20] Б. Р. Мерфи и И. Ватанабе, Цифровые формирующие фильтры для снижения вибрации машин, IEEE Trans. Робот. автомат. 8 (2) (1992), 285-289.10.1109/70.134281Поиск в Google Scholar Международная конференция IEEE по робототехнике и автоматизации, 2604–2609, 1991. Поиск в Google Scholar
[22] М. Робертсон, К. Козак и В. Сингхоз, Вычислительная среда для формирователей цифрового ввода с использованием линейной оптимизации, IEE Proc.-Control Тео. заявл. 153 (3) (2006), 314–322.10.1049/ip-cta:20050045Search in Google Scholar
[23] T.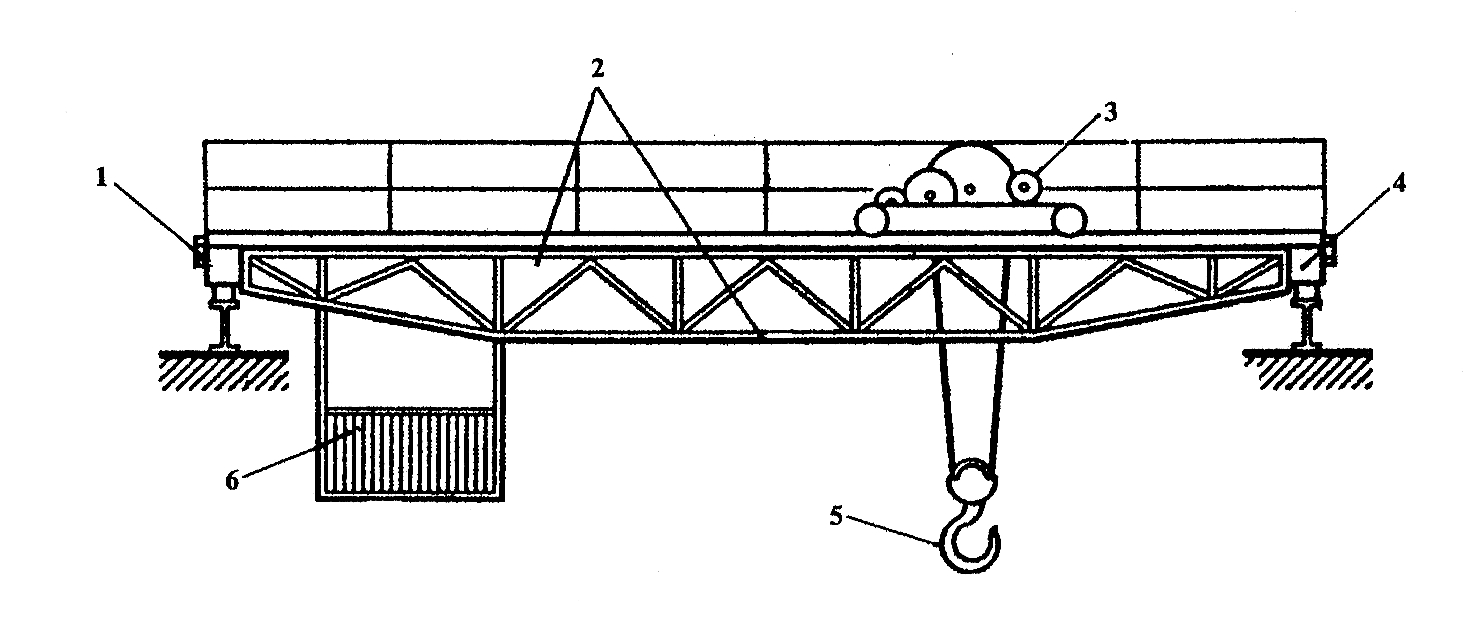 Singh, Jerk limited input shapers, Proc. Являюсь. Конф. управления 5 (март) (2004 г.), 4825–4830.10.23919/ACC.2004.1384077Search in Google Scholar
Singh, Jerk limited input shapers, Proc. Являюсь. Конф. управления 5 (март) (2004 г.), 4825–4830.10.23919/ACC.2004.1384077Search in Google Scholar
[24] К.А. Альганим, К.А. краны, J. Sound Vib. 345 (2015), 47–57.10.1016/j.jsv.2015.01.042Поиск в Google Scholar
[25] М. А. Лау, Л. Ю. Пао, Формирование входных данных и оптимальное по времени управление гибкими конструкциями, Automatica 39 (5) (2003), 893–900.10.1016/S0005-1098(03)00024-4Поиск в Google Scholar
[26] А. Абоэль-Хассан, М. Арафа и А. Нассеф, Проектирование и оптимизация входных формирователей для подавления выплескивания жидкости, J. Sound Vib. 320 (1–2) (2009), 1–15.10.1016/j.jsv.2008.07.015Поиск в Google Scholar
[27] В. Сингхоз, Р. Элунду и Дж. Лоуренс, Генерация команд для гибких систем путем формирования ввода и сглаживания команд, J. Guid. Контроль. Дин. 33 (6) (2010), 1697–1707.10.2514/1.50270Поиск в Google Scholar
[28] U. H. Shah and K.-S. Хонг, Управление формированием входа системы транспортировки топлива атомной электростанции, Нелинейная динамика. 77 (4) (2014), 1737–1748.10.1007/s11071-014-1414-1Поиск в Google Scholar
H. Shah and K.-S. Хонг, Управление формированием входа системы транспортировки топлива атомной электростанции, Нелинейная динамика. 77 (4) (2014), 1737–1748.10.1007/s11071-014-1414-1Поиск в Google Scholar
[29] U.H. Shah, K.-S. Хонг и С.-Х. Чой, Контроль вибрации подводной системы без обратной связи: применение к заправочной машине, IEEE/ASME Trans. Мехатроника 22 (4) (2017), 1622–1632.10.1109/TMECH.2017.2706304Search in Google Scholar
[30] К.А. Альхазза, Регулируемое время маневрирования, управление формированием команд с изменяемой скоростью подъема, J. Vib. Control 23 (7) (2017), 1095–1105.10.1177/1077546315588881Search in Google Scholar
[31] Альхазза К.А., Аль-Шехайма А. и Масуд З.Н. Формирование команд непрерывной модулированной формы волны для мостовых кранов с демпфированием , в Трудах ASME 2011 международных технических конференций по проектированию и компьютерам и информации в инженерной конференции, 2011. 10.1115/DETC2011-48336Поиск в Google Scholar
10.1115/DETC2011-48336Поиск в Google Scholar
[32] Халед А. Альхазза, Экспериментальная проверка непрерывного формирования команд модулированной формы волны, применяемого к демпфирующим системам, в: Темы динамики гражданских конструкций , Том 4 , стр. 445-451. Springer, New York, NY, 2013. doi: 10.1007/978-1-4614-6555-3_48. Search in Google Scholar
[33] М. Дж. Магсуди, З. Мохамед, А. Р. Хусейн и М. О. Тохи, Оптимальная схема управления производительностью для 3D крана, мех. Сист. Сигнальный процесс. 66–67 (2016), 756–768.10.1016/j.ymssp.2015.05.020Поиск в Google Scholar
[34] G. Sun, M. Kleeberger и J. Liu, Полный динамический расчет решетчатого мобильного крана во время подъемного движения, Mech. Мах. Theory 40 (4) (2005), 447–466.10.1016/j.mechmachmachtheory.2004.07.014Search in Google Scholar
[35] W. Singhose, L. Porter, M. Kenison and E. Kriikku, Effects of грузоподъемность на входе, формообразующее управление козловыми кранами, инж. Практика. 8 (10) (2000), 1159–1165.10.1016/S0967-0661(00)00054-XПоиск в Google Scholar
Практика. 8 (10) (2000), 1159–1165.10.1016/S0967-0661(00)00054-XПоиск в Google Scholar
[36] З. Н. Масуд и М. Ф. Дакак, Графический подход к проектированию управления с формированием ввода для контейнерных кранов с подъемником, IEEE Trans. Система управления Технол. 14 (6) (2006), 1070–1077.10.1109/TCST.2006.883194Search in Google Scholar
[37] Khaled A. Alhazza, Abdullah M. Hasan, Khaled A. Alghanim and Ziyad N. Masoud, An iterative обучение технике управления маневрами «точка-точка» на мостовом кране, Shock Vibr. 2014 (2014), ID статьи 261509, 11 страниц.doi: 10.1155/2014/261509.Search в Google Scholar
[PDF] быстрый нелинейный MPC для нагрузочного крана
- DOI: 10.3182/20110828-6-IT-1002.03510
- CORPUS ID: 91182769
@athartiled @ @ @ @ @ @ @ @ @ @ @ @ @at at at at: 91182769.title={Быстрый нелинейный MPC для мостового крана}, автор={Доминик Шинделе и Харальд Ашеманн}, journal={Томы материалов МФБ}, год = {2011}, объем={44}, страницы={7963-7968} }
- Д. Шинделе, Х. Ашеманн
- Опубликовано в 2011 г.
- Engineering
- IFAC Proceedings Volumes
Abstract В этой статье представлена нелинейная схема прогнозирующего управления двумя главными осями мостового крана, которая гарантирует как отслеживание желаемых траекторий крановой нагрузки, так и активное демпфирование крановой нагрузки. колебания. Основная идея используемого алгоритма NMPC состоит в минимизации ошибки слежения в конце горизонта предсказания. Таким образом, вычислительная нагрузка может оставаться относительно небольшой. Различная длина веревки считается усилением…
Просмотр через Publisher
doi.org
Основанный на инверсии дискретный подход к управлению итеративным обучением мостового крана
Обобщенное предиктивное управление мостовым краном
Адаптивное управление мостовым краном разработано на основе метода обобщенного предиктивного управления (GPC).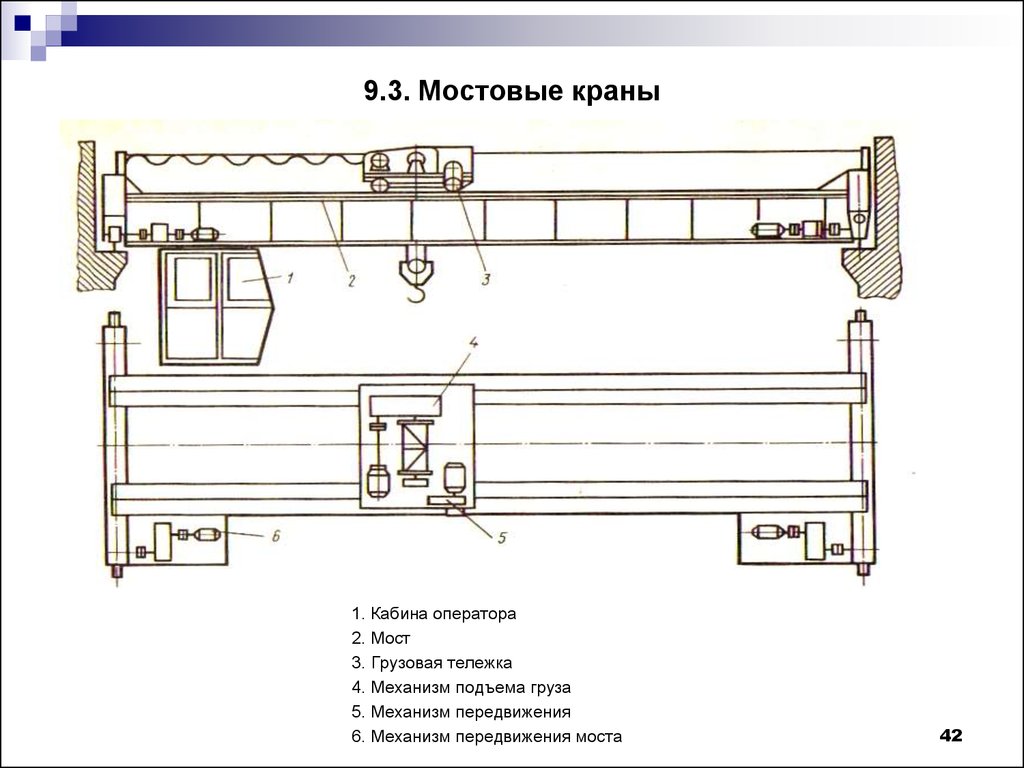 Предложена схема прогнозирующего управления на один шаг вперед для уменьшения невязки и…
Предложена схема прогнозирующего управления на один шаг вперед для уменьшения невязки и…
Экспериментальная проверка нелинейного MPC на мостовом кране с использованием автоматической генерации кода
В этой работе высокоэффективный нелинейный алгоритм MPC применяется к установке мостового крана лабораторного масштаба с быстро движущейся тележкой и механизмом лебедки для выполнения оптимизированной точечной точечные движения с различной длиной линии при соблюдении ограничений привода.
Сравнение моделей прогнозирования, формирования входных данных и управления с обратной связью для лабораторного мостового крана
Возможность и применимость предложенной методики управления была подтверждена в ходе экспериментов, проведенных на лабораторном стенде, и результаты экспериментов представлены и сравнены с характеристиками регулятора с обратной связью и формирователя входных сигналов с нулевой производной вибрации (ZVD).
Экспериментальная проверка комбинированного нелинейного оптимального управления и оценки мостового крана
- Фредерик Дебрувер, М. Вуков, Р. Киринен, М. Диль, М. Диль, Дж. Свиверс
Engineering
- 2014
Резюме В этой статье проверяется сочетание нелинейного прогнозирующего управления и оценки горизонта движения для оптимального управления мостовым краном. Реализация этого комбинированного…
Ограниченное обобщенное прогнозирующее управление с оптимизатором роя частиц для мостового крана
В статье основное внимание уделяется многопараметрическому обобщенному прогнозирующему управлению (GPC) мостового крана с недостаточным приводом с ограничениями на управляемую переменную и угол качания крана. полезная нагрузка с использованием рекурсивного алгоритма наименьших квадратов (RLS) с проекцией параметров.
Сравнение двух нелинейных стратегий прогнозирующего управления на основе модели с компенсацией помех на основе наблюдателя для гидростатической трансмиссии
Два быстрых нелинейных алгоритма прогнозирующего управления модели исследуются и сравниваются для отслеживания управления угловой скоростью двигателя гидростатической трансмиссии, которая коммерчески используется в рабочих машинах.
MPC-PID-управление мостовыми кранами с оператором в контуре: практический подход алгоритм управления приводит тележку в движение, уменьшая колебания груза.
Робастное модельное прогнозирующее управление быстрыми электромеханическими системами с ограничениями
- Ф. Бланчини, Д. Касагранде, Г. Джордано, У. Виаро
Инженерия, математика
Дж. Франкл. Инст.
- 2016
Надежный формирователь входных данных для управления траекторией мостовых кранов с ненулевыми начальными состояниями
За последнее десятилетие были реализованы различные схемы управления для подавления колебаний полезной нагрузки мостового крана при маневрах между упорами. Но на практике кран может не находиться в состоянии покоя, когда…
с показателем 1-10 из 16 ссылок
Сорт Byrelevancemost, на который влиял,
.
 (CCA) & Intelligent Control, (ISIC)
(CCA) & Intelligent Control, (ISIC)
В этом документе представлена оптимальная схема управления по норме h3 для трех основных осей мостового крана, которая гарантирует как отслеживание желаемых траекторий для груза крана, так и активный…
Субоптимальная модель прогнозирующего управления лабораторным краном
- К. Грайхен, М. Эгретцбергер, А. Куги
Инженерное дело
- 2010
Резюме Представлена и применена быстрая модель к схеме прогнозирующего управления (MPC) лабораторный кран с пятью степенями свободы. Схема MPC учитывает ограничения управления и основана на…
Законы управления нелинейной муфтой для системы мостового крана с недостаточным приводом
- Yongchun Fang, W. Dixon, D. Dawson, E. Zergeroglu
Математика, машиностроение
- 2003
В этой статье мы рассматриваем задачу регулирования системы мостового крана. Вдохновленные недавними пассивными контроллерами для систем с недостаточным приводом, мы разработали несколько…
Вдохновленные недавними пассивными контроллерами для систем с недостаточным приводом, мы разработали несколько…
Нелинейное прогнозирующее управление высокоскоростной линейной осью, приводимой в движение пневматическими мышцами
Нелинейная схема прогнозирующего управления для новой линейной оси, приводимой в движение нелинейным механизмом, состоящим коромысла с парой пневматических мускульных приводов, расположенных по обеим сторонам, что заключается в минимизации ошибки слежения в конце прогнозного горизонта.
Адаптивное управление мостовым краном с использованием динамической линеаризации обратной связи и дизайна оценки
Авторы предлагают непрямую адаптивную схему для неполностью управляемых механических систем, таких как мостовые краны или, в более общем смысле, классические жесткие манипуляторы, заканчивающиеся простым маятником, используя преимущество особая структура уравнений.
Нелинейные подходы к управлению с дискретным временем для манипуляторов с недостаточным приводом
В этой статье мы предлагаем два нелинейных подхода к управлению с дискретным временем для манипуляторов с недостаточным приводом, работающих в горизонтальной плоскости, которые оснащены пассивными соединениями. Первый контроль…
Нелинейная модель прогнозирующего управления отклонением вращающегося перевернутого маятника
- С. Юнг, Дж. Вен
Инженерное дело
- 2004
алгоритм прогнозирующего управления (NMPC) для управления поворотом вращающегося перевернутого маятника. Ключевой атрибут…
Нелинейная модель предиктивного управления линейной осью на основе пневматических мышц
- H. Aschemann, D. Schindele
Engineering
ICINCO-ICSO
- 2007
пневматические мышцы в качестве исполнительных механизмов, демонстрирующие отличные характеристики управления.
