

Содержание
Презентация по теме » Модели поведения пешехода, пассажира, велосипедиста и водителя»
ТЕМА: Правила и безопасность дорожного движения.
Разработчик: преподаватель-организатор ОБЖ Митяев Игорь Иванович
Печорское речное училище -филиал ФГБОУ ВО
«ГУМРФ им. адмирала С.О.Макарова»
2017 год
СОДЕРЖАНИЕ:
- Модели поведения пешеходов при организации дорожного движения.
- Модели поведения велосипедистов при организации дорожного движения.
- Модели поведения пассажиров при организации дорожного движения.
- Модели поведения водителей транспортных средств при организации дорожного движения.
- Модели поведения пешеходов
при организации дорожного движения.
Пешеходы должны двигаться по тротуарам, пешеходным дорожкам, велопешеходным дорожкам, а при их отсутствии — по обочинам. Пешеходы, перевозящие или переносящие громоздкие предметы, а также лица, передвигающиеся в инвалидных колясках без двигателя, могут двигаться по краю проезжей части, если их движение по тротуарам или обочинам создает помехи для других пешеходов. 4.1.
Пешеходы, перевозящие или переносящие громоздкие предметы, а также лица, передвигающиеся в инвалидных колясках без двигателя, могут двигаться по краю проезжей части, если их движение по тротуарам или обочинам создает помехи для других пешеходов. 4.1.
При отсутствии тротуаров, пешеходных дорожек, велопешеходных дорожек или обочин, а также в случае невозможности двигаться по ним пешеходы могут двигаться по велосипедной дорожке или идти в один ряд по краю проезжей части (на дорогах с разделительной полосой — по внешнему краю проезжей части). 4.1.
При движении по краю проезжей части пешеходы должны идти навстречу движению транспортных средств. Лица, передвигающиеся в инвалидных колясках без двигателя, ведущие мотоцикл, мопед, велосипед, в этих случаях должны следовать по ходу движения транспортных средств. 4.1.
При движении по обочинам или краю проезжей части в темное время суток или в условиях недостаточной видимости пешеходам рекомендуется иметь при себе предметы со световозвращающими элементами и обеспечивать видимость этих предметов водителями транспортных средств. 4.1.
4.1.
Движение организованных пеших колонн по проезжей части разрешается только по направлению движения транспортных средств по правой стороне не более чем по четыре человека в ряд. Спереди и сзади колонны с левой стороны должны находиться сопровождающие с красными флажками, а в темное время суток и в условиях недостаточной видимости — с включенными фонарями: спереди — белого цвета, сзади — красного. 4.2.
Группы детей разрешается водить только по тротуарам и пешеходным дорожкам, а при их отсутствии — и по обочинам, но лишь в светлое время суток и только в сопровождении взрослых. 4.2.
Пешеходы должны пересекать проезжую часть по пешеходным переходам, в том числе по подземным и надземным, а при их отсутствии — на перекрестках по линии тротуаров или обочин. 4.3.
При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны. 4.3 .
4.3 .
В местах, где движение регулируется, пешеходы должны руководствоваться сигналами регулировщика или пешеходного светофора, а при его отсутствии — транспортного светофора. 4.4.
На нерегулируемых пешеходных переходах пешеходы могут выходить на проезжую часть после того, как оценят расстояние до приближающихся транспортных средств, их скорость и убедятся, что переход будет для них безопасен. При пересечении проезжей части вне пешеходного перехода пешеходы, кроме того, не должны создавать помех для движения транспортных средств и выходить из-за стоящего транспортного средства или иного препятствия, ограничивающего обзорность, не убедившись в отсутствии приближающихся транспортных средств. 4.5.
Выйдя на проезжую часть, пешеходы не должны задерживаться или останавливаться, если это не связано с обеспечением безопасности движения. Пешеходы, не успевшие закончить переход, должны остановиться на линии, разделяющей транспортные потоки противоположных направлений. Продолжать переход можно лишь убедившись в безопасности дальнейшего движения и с учетом сигнала светофора (регулировщика). 4.6.
Продолжать переход можно лишь убедившись в безопасности дальнейшего движения и с учетом сигнала светофора (регулировщика). 4.6.
При приближении транспортных средств с включенным проблесковым маячком синего цвета (синего и красного цветов) и специальным звуковым сигналом пешеходы обязаны воздержаться от перехода проезжей части, а пешеходы, находящиеся на ней, должны незамедлительно освободить проезжую часть. 4.7.
Ожидать маршрутное транспортное средство и такси разрешается только на приподнятых над проезжей частью посадочных площадках, а при их отсутствии — на тротуаре или обочине. В местах остановок маршрутных транспортных средств, не оборудованных приподнятыми посадочными площадками, разрешается выходить на проезжую часть для посадки в транспортное средство лишь после его остановки. После высадки необходимо, не задерживаясь, освободить проезжую часть. 4.8.
При движении через проезжую часть к месту остановки маршрутного транспортного средства или от него пешеходы должны руководствоваться требованиями пунктов 4. 4 — 4.7 Правил.
4 — 4.7 Правил.
2. Модели поведения велосипедистов при организации дорожного движения.
Обязанности велосипедистов.
24.1. Движение велосипедистов в возрасте старше 14 лет должно осуществляться по велосипедной, велопешеходной дорожкам или полосе для велосипедистов.
24.2. Допускается движение велосипедистов в возрасте старше 14 лет:
- по правому краю проезжей части — в следующих случаях:
- отсутствуют велосипедная и велопешеходная дорожки, полоса для велосипедистов либо отсутствует возможность двигаться по ним; габаритная ширина велосипеда, прицепа к нему либо перевозимого груза превышает 1 м; движение велосипедистов осуществляется в колоннах;
- отсутствуют велосипедная и велопешеходная дорожки, полоса для велосипедистов либо отсутствует возможность двигаться по ним;
- габаритная ширина велосипеда, прицепа к нему либо перевозимого груза превышает 1 м;
- движение велосипедистов осуществляется в колоннах;
- по обочине — в случае, если отсутствуют велосипедная и велопешеходная дорожки, полоса для велосипедистов либо отсутствует возможность двигаться по ним или по правому краю проезжей части;
- по тротуару или пешеходной дорожке — в следующих случаях:
- отсутствуют велосипедная и велопешеходная дорожки, полоса для велосипедистов либо отсутствует возможность двигаться по ним, а также по правому краю проезжей части или обочине; велосипедист сопровождает велосипедиста в возрасте до 7 лет либо перевозит ребенка в возрасте до 7 лет на дополнительном сиденье, в велоколяске или в прицепе, предназначенном для эксплуатации с велосипедом.
 Однако если вы просто катите свой велосипед рядом, то автоматически приравниваетесь к пешеходу, а значит, идти по тротуару можете. То же самое относится к пересечению нерегулируемого пешеходного перехода: спешившись, вы можете пользоваться привилегиями пешеходов и переходить дорогу с велосипедом, обладая преимуществом перед автотранспортом
Однако если вы просто катите свой велосипед рядом, то автоматически приравниваетесь к пешеходу, а значит, идти по тротуару можете. То же самое относится к пересечению нерегулируемого пешеходного перехода: спешившись, вы можете пользоваться привилегиями пешеходов и переходить дорогу с велосипедом, обладая преимуществом перед автотранспортом - отсутствуют велосипедная и велопешеходная дорожки, полоса для велосипедистов либо отсутствует возможность двигаться по ним, а также по правому краю проезжей части или обочине;
- велосипедист сопровождает велосипедиста в возрасте до 7 лет либо перевозит ребенка в возрасте до 7 лет на дополнительном сиденье, в велоколяске или в прицепе, предназначенном для эксплуатации с велосипедом.
- Однако если вы просто катите свой велосипед рядом, то автоматически приравниваетесь к пешеходу, а значит, идти по тротуару можете. То же самое относится к пересечению нерегулируемого пешеходного перехода: спешившись, вы можете пользоваться привилегиями пешеходов и переходить дорогу с велосипедом, обладая преимуществом перед автотранспортом
24. 3. Движение велосипедистов в возрасте от 7 до 14 лет должно осуществляться только по тротуарам, пешеходным, велосипедным и велопешеходным дорожкам, а также в пределах пешеходных зон.
3. Движение велосипедистов в возрасте от 7 до 14 лет должно осуществляться только по тротуарам, пешеходным, велосипедным и велопешеходным дорожкам, а также в пределах пешеходных зон.
24.4. Движение велосипедистов в возрасте младше 7 лет должно осуществляться только по тротуарам, пешеходным и велопешеходным дорожкам (на стороне для движения пешеходов), а также в пределах пешеходных зон.
24.5. При движении велосипедистов по правому краю проезжей части в случаях, предусмотренных настоящими Правилами, велосипедисты должны двигаться только в один ряд.
Допускается движение колонны велосипедистов в два ряда в случае, если габаритная ширина велосипедов не превышает 0,75 м.
Колонна велосипедистов должна быть разделена на группы по 10 велосипедистов в случае однорядного движения либо на группы по 10 пар в случае двухрядного движения. Для облегчения обгона расстояние между группами должно составлять 80 — 100 м.
24.6. Если движение велосипедиста по тротуару, пешеходной дорожке, обочине или в пределах пешеходных зон подвергает опасности или создает помехи для движения иных лиц, велосипедист должен спешиться и руководствоваться требованиями, предусмотренными настоящими Правилами для движения пешеходов.
24.8. Велосипедистам запрещается:
- управлять велосипедом не держась за руль хотя бы одной рукой;
- перевозить груз, который выступает более чем на 0,5 м по длине или ширине за габариты, или груз, мешающий управлению;
- перевозить пассажиров, если это не предусмотрено конструкцией транспортного средства;
- перевозить детей до 7 лет при отсутствии специально оборудованных для них мест;
- поворачивать налево или разворачиваться на дорогах с трамвайным движением и на дорогах, имеющих более одной полосы для движения в данном направлении;
- пересекать дорогу по пешеходным переходам.
24. 9. Запрещается буксировка велосипедов, а также буксировка велосипедами и мопедами, кроме буксировки прицепа, предназначенного для эксплуатации с велосипедом или мопедом.
9. Запрещается буксировка велосипедов, а также буксировка велосипедами и мопедами, кроме буксировки прицепа, предназначенного для эксплуатации с велосипедом или мопедом.
24.10. При движении в темное время суток или в условиях недостаточной видимости велосипедистам рекомендуется иметь при себе предметы со световозвращающими элементами и обеспечивать видимость этих предметов водителями других транспортных средств.
3. Модели поведения пассажиров при организации дорожного движения
4. Модели поведения водителей транспортных средств при организации дорожного движения.
Модели поведения пешеходов пассажиров водителей транспортных средств при организации дорожного движения
Похожие презентации:
Информационная безопасность. Методы защиты информации
Методы защиты информации
Оказание первой доврачебной помощи
Контрацепция. Методы контрацепции
Коронавирус Covid-19
Электробезопасность
Основы здорового образа жизни студента. Физическая культура в обеспечении здоровья
Первая помощь при ожогах
Безопасное проведение работ на высоте
Электротравма
Интерактивная игра «Безопасное лето»
Выполнил Нестеренко Максим
Студент ОГАПОУ «Валуйский колледж»
Согласно
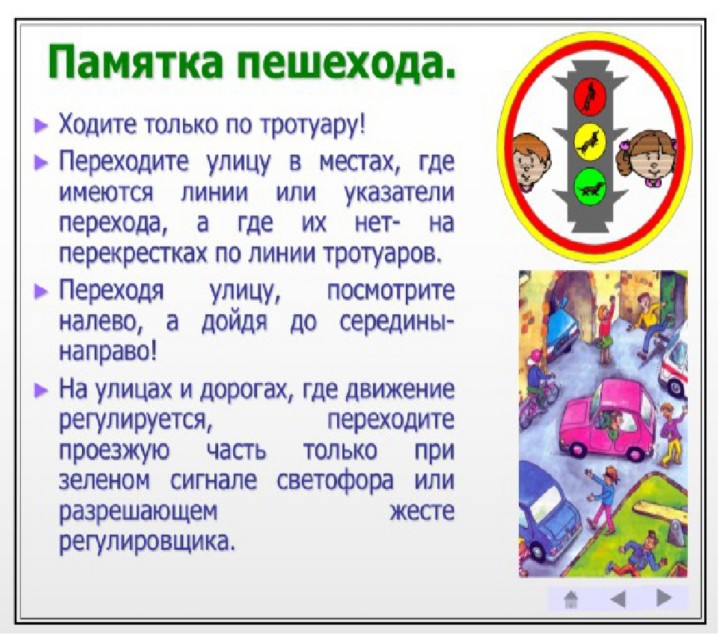
пешеход
в праве:
Осуществлять ПДД,
передвижение
по специально
отведенным для
этого местам –дорожкам, тротуарам, обочинам навстречу
движению.
Останавливаться на островках безопасности.
Переходить дорогу в предусмотренных для этого местах – по
«зебре», через подземный или надземный переход.
Руководствоваться сигналами регулировщика, при его
наличии.
Движение пеших колон осуществляется навстречу
транспортным средствам, не более чем по 4 человека.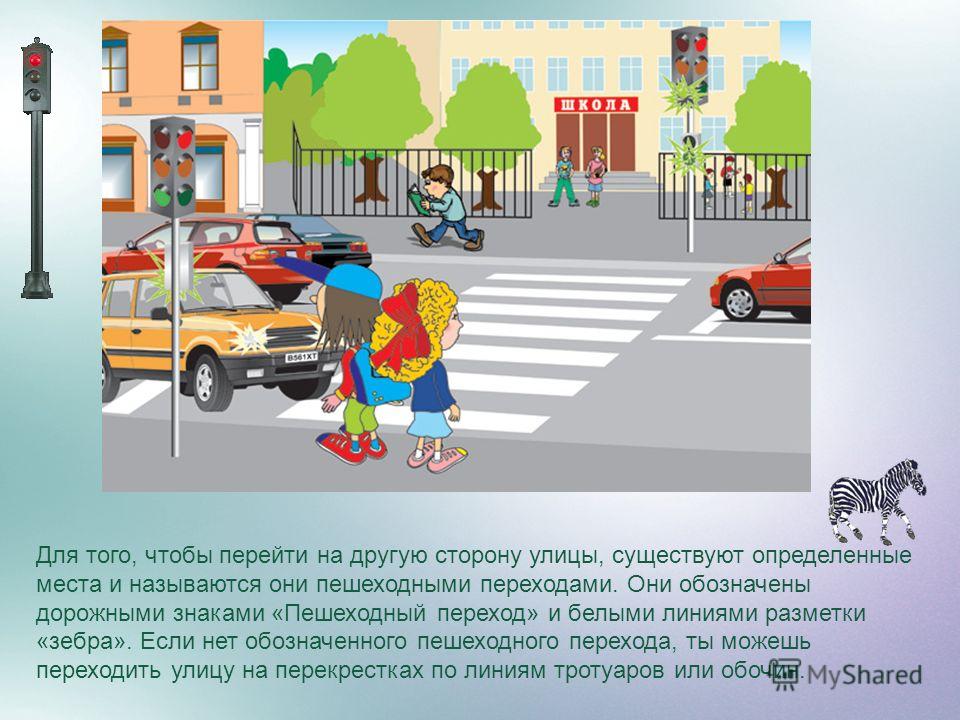 Также
Также
спереди и сзади должны находиться красные флажки и
фонари (в темное время суток).
Что нельзя
Пешеходам категорически запрещается:
Перебегать дорогу.
Игнорировать сигналы светофора или регулировщика.
Передвигаться по дорожному покрытию, мешая движению
автомобилей.
Выходить на проезжую часть из-за транспортного средства,
так как другие машины могут вас не увидеть.
Пассажир
Даже пассивные участники должны
придерживаться ПДД. Пассажирами
принято считать лиц, которые
находятся в транспорте, не управляя
им.
Пассажир
Что можно
В обязанности пассажира общественного транспорта
(метро, автобус, троллейбус, трамвай, маршрутное
такси) входит обязательная оплата проезда и багажа в
соответствии с установленными тарифами в
конкретном регионе. Для получения льготы
необходимо иметь удостоверение.
Посадка и высадка осуществляется только в строго
отведенных местах. Если последние по каким-либо
причинам не возможны со стороны тротуара,
допустимо делать это со стороны движения машин.
Однако только без помех для ДД.
Пассажиры обязаны соблюдать технику безопасности:
пристёгивать ремни, держаться за поручни, быть в
шлеме при поездке на мотоцикле или мопеде.
Пассажир
Что нельзя
Пассажирам категорически запрещено игнорировать
технику безопасности в салоне, отвлекать водителя. Нельзя
требовать остановки в неположенном для этого месте.
Пассажирам общественного транспорта запрещено стоять
около двери или опираться на нее, а также самостоятельно
открывать. Недопустимо высовывать голову, руки или иные
части тела в окно при скоростном движении.
Кроме того, в общественном транспорте запрещено
переводить взрывоопасные грузы, химические или
ядовитые вещества.
При движении в грузовом автомобиле нельзя сидеть на
бортах или грузах, которые выступают за пределы кузова.
Модель поведения пассажиров при организации дорожного
движения зависит от ситуации. Строгое соблюдение правил
защитит от штрафов, аварий, увечий и даже смерти
Водитель
Здесь нюансов больше. Модели
Модели
поведения для водителей при
организации дорожного движения
обязательны. Это самые главные
участники дорожного движения, ведь
от их знания ПДД и решений зависит
собственная жизнь, пешеходов и
пассажиров.
Водитель
Что можно
Водителю разрешено осуществлять движение
согласно ПДД. Он в праве перевозить пассажиры и
грузы при наличии соответствующей лицензии.
Последнее относится к водителю общественного
транспорта.
Он может пользоваться стоянками для автомобилей –
платными, бесплатными.
В случае экстренной поломки водителю разрешено
остановиться в любом месте, включив аварийный
сигнал и выставив знак остановки. Исключение
составляют мосты, тоннели. Машину придётся
откатить.
В обязанности водителя также входит поддержание
транспортного средства в рабочем состоянии.
Водитель
Что нельзя
Водителю категорически запрещено
садиться за руль без прав
соответствующей категории, в
алкогольном или наркотическом
опьянении. Также передавать
Также передавать
управление вышеупомянутым.
Водитель не может игнорировать ПДД,
сигналы светофора и регулировщика.
Он всегда должен быть пристёгнут
ремнем безопасности.
Запрещено пресекать организованные
колонны (как пешие, так и
Штрафы
С наказанием строго. За нарушение
установленных правил любым из участников
движения предусматриваются штрафные
санкции. Они делятся на создающие помехи
для движения и нет.
Трактовка штрафов ГИБДД и сумма может
менять каждый год. Поэтому, при
необходимости, лучше отслеживать
обновления на официальном сайте.
Модель поведения при
организации дорожного
движения – очень важный аспект для
каждого человека. От этого зависят
безопасность и жизнь. К задачам
модели поведения можно отнести
коррекцию действий во избежание
ДТП, а также формирования
определенного мышления и
поведения.
Закладывать правила дорожного
English
Русский
Правила
Безопасность дорожного движения.
 Модели поведения пешеходов, велосипедистов, пассажиров и водителей транспортных средств
Модели поведения пешеходов, велосипедистов, пассажиров и водителей транспортных средств
ТЕМА: Правила и
безопасность дорожного
движения.
Модели поведения
пешеходов, велосипедистов,
пассажиров и водителей
транспортных средств, при
организации дорожного
движения
СОДЕРЖАНИЕ:
1. Модели поведения пешеходов при организации
дорожного движения.
2. Модели поведения велосипедистов при организации
дорожного движения.
3. Модели поведения пассажиров при организации
дорожного движения.
4. Модели поведения водителей транспортных средств
при организации дорожного движения.
1.Модели поведения пешеходов
при организации дорожного движения.
Пешеходы должны двигаться по тротуарам, пешеходным
дорожкам, велопешеходным дорожкам, а при их
отсутствии — по обочинам. Пешеходы, перевозящие или
переносящие громоздкие предметы, а также лица,
передвигающиеся в инвалидных колясках без двигателя,
могут двигаться по краю проезжей части, если их
движение по тротуарам или обочинам создает помехи для
других пешеходов. 4.1.
4.1.
При отсутствии тротуаров, пешеходных дорожек,
велопешеходных дорожек или обочин, а также в
случае невозможности двигаться по ним пешеходы
могут двигаться по велосипедной дорожке или идти в
один ряд по краю проезжей части (на дорогах с
разделительной полосой — по внешнему краю
проезжей части). 4.1.
При движении по краю проезжей части пешеходы должны
идти навстречу движению транспортных средств. Лица,
передвигающиеся в инвалидных колясках без двигателя,
ведущие мотоцикл, мопед, велосипед, в этих случаях
должны следовать по ходу движения транспортных
средств. 4.1.
При движении по обочинам или краю проезжей части в
темное время суток или в условиях недостаточной
видимости пешеходам рекомендуется иметь при себе
предметы
со
световозвращающими
элементами
и
обеспечивать видимость этих предметов водителями
транспортных средств. 4.1.
Движение организованных пеших колонн по проезжей
части разрешается только по направлению движения
транспортных средств по правой стороне не более чем
по четыре человека в ряд. Спереди и сзади колонны с
Спереди и сзади колонны с
левой стороны должны находиться сопровождающие с
красными флажками, а в темное время суток и в
условиях недостаточной видимости — с включенными
фонарями: спереди — белого цвета, сзади — красного. 4.2.
Группы детей разрешается водить только по тротуарам и
пешеходным дорожкам, а при их отсутствии — и по
обочинам, но лишь в светлое время суток и только в
сопровождении взрослых. 4.2.
Пешеходы должны пересекать проезжую часть по
пешеходным переходам, в том числе по подземным и
надземным, а при их отсутствии — на перекрестках по
линии тротуаров или обочин. 4.3.
При отсутствии в зоне видимости перехода или
перекрестка разрешается переходить дорогу под
прямым углом к краю проезжей части на участках без
разделительной полосы и ограждений там, где она
хорошо просматривается в обе стороны.4.3.
В местах, где движение регулируется, пешеходы
должны руководствоваться сигналами регулировщика
или пешеходного светофора, а при его отсутствии транспортного светофора. 4.4.
4.4.
На нерегулируемых пешеходных переходах пешеходы
могут выходить на проезжую часть после того, как оценят
расстояние до приближающихся транспортных средств, их
скорость и убедятся, что переход будет для них
безопасен. При пересечении проезжей части вне
пешеходного перехода пешеходы, кроме того, не должны
создавать помех для движения транспортных средств и
выходить из-за стоящего транспортного средства или
иного препятствия, ограничивающего обзорность, не
убедившись в отсутствии приближающихся транспортных
средств. 4.5.
Выйдя на проезжую часть, пешеходы не должны
задерживаться или останавливаться, если это не связано с
обеспечением безопасности движения. Пешеходы, не
успевшие закончить переход, должны остановиться на
линии, разделяющей транспортные потоки противоположных
направлений. Продолжать переход можно лишь убедившись
в безопасности дальнейшего движения и с учетом сигнала
светофора (регулировщика). 4.6.
При приближении транспортных средств с включенным
проблесковым маячком синего цвета (синего и красного
цветов) и специальным звуковым сигналом пешеходы
обязаны воздержаться от перехода проезжей части, а
пешеходы, находящиеся на ней, должны незамедлительно
освободить проезжую часть. 4.7.
Ожидать маршрутное транспортное средство и такси
разрешается только на приподнятых над проезжей
частью посадочных площадках, а при их отсутствии на тротуаре или обочине. В местах остановок
маршрутных транспортных средств, не оборудованных
приподнятыми
посадочными
площадками,
разрешается выходить на проезжую часть для посадки
в транспортное средство лишь после его остановки.
После высадки необходимо, не задерживаясь,
освободить проезжую часть. 4.8.
При движении через проезжую
часть к месту остановки
маршрутного
транспортного
средства
или
от
него
пешеходы
должны
руководствоваться
требованиями пунктов 4. 4 — 4.7
4 — 4.7
Правил.
2. Модели поведения велосипедистов при
организации дорожного движения.
Обязанности
велосипедистов.
24.1.
Движение
велосипедистов в возрасте
старше 14 лет должно
осуществляться
по
велосипедной,
велопешеходной дорожкам
или
полосе
для
велосипедистов.
24.2. Допускается движение велосипедистов в возрасте
старше 14 лет:
•по правому краю проезжей части — в следующих случаях:
o отсутствуют велосипедная и велопешеходная
дорожки, полоса для велосипедистов либо
отсутствует возможность двигаться по ним;
o габаритная ширина велосипеда, прицепа к нему либо
перевозимого груза превышает 1 м;
o движение велосипедистов осуществляется в
колоннах;
•по обочине — в случае, если отсутствуют велосипедная и
велопешеходная дорожки, полоса для велосипедистов
либо отсутствует возможность двигаться по ним или по
правому краю проезжей части;
•по тротуару или пешеходной дорожке — в следующих случаях:
o отсутствуют велосипедная и велопешеходная дорожки,
полоса для велосипедистов либо отсутствует
возможность двигаться по ним, а также по правому краю
проезжей части или обочине;
o велосипедист сопровождает велосипедиста в возрасте
до 7 лет либо перевозит ребенка в возрасте до 7 лет на
дополнительном сиденье, в велоколяске или в прицепе,
предназначенном для эксплуатации с велосипедом.
o Однако если вы просто катите свой велосипед рядом, то
автоматически приравниваетесь к пешеходу, а значит,
идти по тротуару можете. То же самое относится к
пересечению нерегулируемого пешеходного перехода:
спешившись, вы можете пользоваться привилегиями
пешеходов и переходить дорогу с велосипедом, обладая
преимуществом перед автотранспортом
24.3. Движение велосипедистов в возрасте от 7 до 14 лет
должно осуществляться только по тротуарам, пешеходным,
велосипедным и велопешеходным дорожкам, а также в
пределах пешеходных зон.
24.4. Движение велосипедистов в возрасте младше 7 лет
должно осуществляться только по тротуарам, пешеходным
и велопешеходным дорожкам (на стороне для движения
пешеходов), а также в пределах пешеходных зон.
24.5. При движении велосипедистов по правому краю
проезжей
части
в
случаях,
предусмотренных
настоящими
Правилами,
велосипедисты
должны
двигаться только в один ряд.
Допускается движение колонны велосипедистов в два
ряда в случае, если габаритная ширина велосипедов не
превышает 0,75 м.
Колонна велосипедистов должна быть разделена на
группы по 10 велосипедистов в случае однорядного
движения либо на группы по 10 пар в случае двухрядного
движения. Для облегчения обгона расстояние между
группами должно составлять 80 — 100 м.
24.6.
Если
движение
велосипедиста по тротуару,
пешеходной дорожке, обочине
или в пределах пешеходных
зон подвергает опасности или
создает помехи для движения
иных
лиц,
велосипедист
должен
спешиться
и
руководствоваться
требованиями,
предусмотренными
настоящими Правилами для
движения пешеходов.
24.8. Велосипедистам запрещается:
•управлять велосипедом не держась за руль хотя бы
одной рукой;
•перевозить груз, который выступает более чем на 0,5 м
по длине или ширине за габариты, или груз, мешающий
управлению;
•перевозить пассажиров, если это не предусмотрено
конструкцией транспортного средства;
•перевозить детей до 7 лет при отсутствии специально
оборудованных для них мест;
•поворачивать налево или разворачиваться на дорогах с
трамвайным движением и на дорогах, имеющих более
одной полосы для движения в данном направлении;
•пересекать дорогу по пешеходным переходам.
24.9. Запрещается буксировка велосипедов, а также
буксировка велосипедами и мопедами, кроме буксировки
прицепа,
предназначенного
для
эксплуатации
с
велосипедом или мопедом.
24.10. При движении в темное время суток или в условиях
недостаточной видимости велосипедистам рекомендуется
иметь при себе предметы со световозвращающими
элементами и обеспечивать видимость этих предметов
водителями других транспортных средств.
Изучение моделей поведения пешеходов, велосипедистов, пассажиров — презентация на Slide-Share.ru 🎓
1
Первый слайд презентации
Тема занятия : Изучение моделей поведения пешеходов, велосипедистов, пассажиров и водителей транспортных средств при организации дорожного движения.
Изображение слайда
2
Слайд 2
СОДЕРЖАНИЕ:
Модели поведения пешеходов при организации дорожного движения.
Модели поведения велосипедистов при организации дорожного движения.
Модели поведения пассажиров при организации дорожного движения.
Модели поведения водителей транспортных средств при организации дорожного движения.
Изображение слайда
3
Слайд 3
Модели поведения пешеходов
при организации дорожного движения.
Изображение слайда
4
Слайд 4
Пешеходы должны двигаться по тротуарам, пешеходным дорожкам, велопешеходным дорожкам, а при их отсутствии — по обочинам. Пешеходы, перевозящие или переносящие громоздкие предметы, а также лица, передвигающиеся в инвалидных колясках без двигателя, могут двигаться по краю проезжей части, если их движение по тротуарам или обочинам создает помехи для других пешеходов. 4.1.
4.1.
Изображение слайда
5
Слайд 5
Изображение слайда
6
Слайд 6
Изображение слайда
7
Слайд 7
При отсутствии тротуаров, пешеходных дорожек, велопешеходных дорожек или обочин, а также в случае невозможности двигаться по ним пешеходы могут двигаться по велосипедной дорожке или идти в один ряд по краю проезжей части (на дорогах с разделительной полосой — по внешнему краю проезжей части). 4.1.
Изображение слайда
8
Слайд 8
При движении по краю проезжей части пешеходы должны идти навстречу движению транспортных средств. Лица, передвигающиеся в инвалидных колясках без двигателя, ведущие мотоцикл, мопед, велосипед, в этих случаях должны следовать по ходу движения транспортных средств. 4.1.
Лица, передвигающиеся в инвалидных колясках без двигателя, ведущие мотоцикл, мопед, велосипед, в этих случаях должны следовать по ходу движения транспортных средств. 4.1.
Изображение слайда
9
Слайд 9
Группы детей разрешается водить только по тротуарам и пешеходным дорожкам, а при их отсутствии — и по обочинам, но лишь в светлое время суток и только в сопровождении взрослых. 4.2.
Изображение слайда
10
Слайд 10
В местах, где движение регулируется, пешеходы должны руководствоваться сигналами регулировщика или пешеходного светофора, а при его отсутствии — транспортного светофора. 4.4.
Изображение слайда
11
Слайд 11
Выйдя на проезжую часть, пешеходы не должны задерживаться или останавливаться, если это не связано с обеспечением безопасности движения. Пешеходы, не успевшие закончить переход, должны остановиться на линии, разделяющей транспортные потоки противоположных направлений. Продолжать переход можно лишь убедившись в безопасности дальнейшего движения и с учетом сигнала светофора (регулировщика). 4.6.
Пешеходы, не успевшие закончить переход, должны остановиться на линии, разделяющей транспортные потоки противоположных направлений. Продолжать переход можно лишь убедившись в безопасности дальнейшего движения и с учетом сигнала светофора (регулировщика). 4.6.
Изображение слайда
12
Слайд 12
При приближении транспортных средств с включенным проблесковым маячком синего цвета (синего и красного цветов) и специальным звуковым сигналом пешеходы обязаны воздержаться от перехода проезжей части, а пешеходы, находящиеся на ней, должны незамедлительно освободить проезжую часть. 4.7.
Изображение слайда
13
Слайд 13
Ожидать маршрутное транспортное средство и такси разрешается только на приподнятых над проезжей частью посадочных площадках, а при их отсутствии — на тротуаре или обочине. В местах остановок маршрутных транспортных средств, не оборудованных приподнятыми посадочными площадками, разрешается выходить на проезжую часть для посадки в транспортное средство лишь после его остановки. После высадки необходимо, не задерживаясь, освободить проезжую часть. 4.8.
В местах остановок маршрутных транспортных средств, не оборудованных приподнятыми посадочными площадками, разрешается выходить на проезжую часть для посадки в транспортное средство лишь после его остановки. После высадки необходимо, не задерживаясь, освободить проезжую часть. 4.8.
Изображение слайда
14
Слайд 14
При движении через проезжую часть к месту остановки маршрутного транспортного средства или от него пешеходы должны руководствоваться требованиями пунктов 4.4 — 4.7 Правил.
Изображение слайда
15
Слайд 15
Обязанности велосипедистов.
24.1. Движение велосипедистов в возрасте старше 14 лет должно осуществляться по велосипедной, велопешеходной дорожкам или полосе для велосипедистов.
2. Модели поведения велосипедистов при организации дорожного движения.
Изображение слайда
16
Слайд 16
24.2. Допускается движение велосипедистов в возрасте старше 14 лет:
по правому краю проезжей части — в следующих случаях:
отсутствуют велосипедная и велопешеходная дорожки, полоса для велосипедистов либо отсутствует возможность двигаться по ним;
габаритная ширина велосипеда, прицепа к нему либо перевозимого груза превышает 1 м;
движение велосипедистов осуществляется в колоннах;
Изображение слайда
17
Слайд 17
по обочине — в случае, если отсутствуют велосипедная и велопешеходная дорожки, полоса для велосипедистов либо отсутствует возможность двигаться по ним или по правому краю проезжей части;
Изображение слайда
18
Последний слайд презентации: Тема занятия : Изучение моделей поведения пешеходов, велосипедистов, пассажиров
Изображение слайда
|
Навигация:
Топ: Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает… Динамика и детерминанты показателей газоанализа юных спортсменов в восстановительном периоде после лабораторных нагрузок до отказа… Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства…
Интересное: Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом… Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все… Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы.
Дисциплины:
|
Стр 1 из 4Следующая ⇒ Практическая работа Изучение моделей поведения пешеходов, велосипедистов, пассажиров и водителей транспортных средств при организации дорожного движения. Задание 1. Раскрыть поведение пешеходов, велосипедистов, пассажиров и водителей транспортных средств, при организации дорожного движения. 2. Познакомиться поведение пешеходов, велосипедистов, пассажиров и водителей транспортных средств при организации дорожного движения.
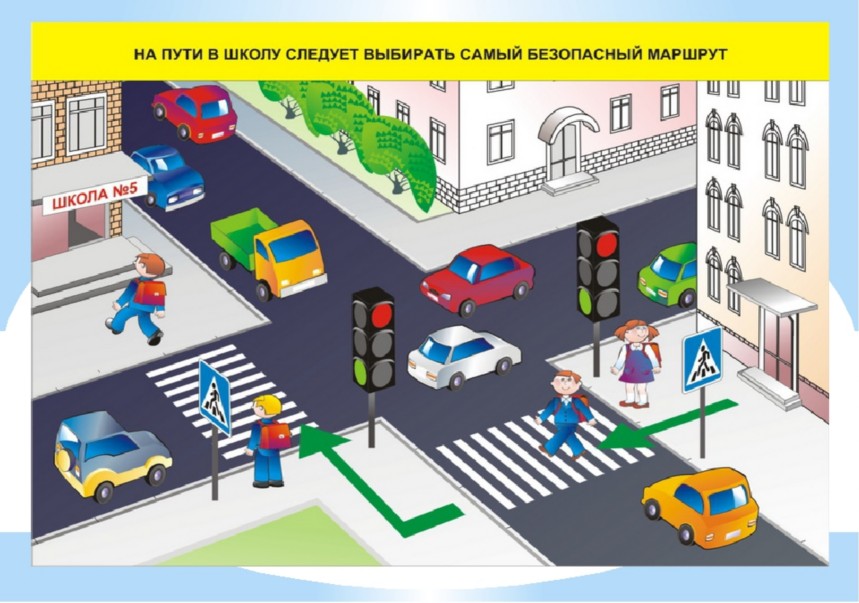
з. Посмотреть видео материал https://www.youtube.com/watch?v=JnahHiUVBGc 4. Составить конспект 5. Составить вопросы Описать поведение пешеходов, велосипедистов, пассажиров и водителей транспортных средств, при организации дорожного движения. Для передвижения люди пользуются общественным транспортом, личными транспортными средствами (автомобилями, мотоциклами, велосипедами) или идут пешком. Все они являются участниками дорожного движения. Участник дорожного движения — это лицо, принимающее непосредственное участие в движении в качестве водителя, пешехода, пассажира транспортного средства. Для того чтобы это движение носило упорядоченный характер и обеспечивало всем участникам возможность быстро и безопасно двигаться в необходимом им направлении, они должны соблюдать определенные правила, которые регулируют движение на улицах и дорогах. В настоящее время в Российской Федерации действуют Правила дорожного движения, введенные в действие с 1 июня 1994 г., с изменениями и дополнениями, внесенными в 2015 гг. Коротко напомним основные положения Правил дорожного движения и ключевые понятия и термины В соответствии с Правилами в нашей стране принято правостороннее движение, т. е. транспорт при движении придерживается правой стороны проезжей части дороги. Дорога — это обустроенная или приспособленная и используемая для движения транспортных средств полоса земли либо поверхность искусственного сооружения (моста). Дорога включает в себя одну или несколько проезжих частей, трамвайные пути, тротуары, обочины и разделительные полосы. Проезжая часть дороги предназначена для движения безрельсовых транспортных средств (легковых и грузовых автомобилей, автобусов, троллейбусов), трамвайные пути — для трамваев, тротуары — для пешеходов, обочина — для движения пешеходов и для остановки автомобилей. Для обеспечения безопасности на улицах и дорогах осуществляется регулирование дорожного движения — управление потоком движения транспорта и пешеходов. Дорожное движение регулируют дорожная разметка, дорожные знаки, светофоры и регулировщики. Пешеходные переходы: слева — «зебра», справа — «зебра» со стрелками разметки, которые указывают направление движения пешеходов Насчитывается более 200 знаков. Для того чтобы облегчить их распознавание, они разделены на 8 групп: 1. Предупреждающие. 2. Приоритета. 3. Запрещающие. 4. Предписывающие. 5. Особых предписаний. 6. Информационные. 7. 8. Дополнительной информации (таблички). К каждой группе относятся знаки, передающие информацию одинакового значения. Запомните! Для того чтобы уверенно себя чувствовать на улицах и дорогах и безопасно двигаться по ним, каждый участник дорожного движения должен знать дорожные знаки1. Для регулирования очередности пропуска участников дорожного движения через определенный участок дороги применяют светофоры, которые имеют сигналы зеленого, желтого и красного цвета. Это должен знать каждый Зеленый сигнал светофора разрешает движение. Желтый сигнал запрещает движение и предупреждает о предстоящей смене сигналов. Красный сигнал запрещает движение. Для регулирования дорожного движения применяются две группы светофоров: транспортные и пешеходные. Транспортные светофоры могут быть трехсекционными, с вертикальным расположением сигналов сверху вниз: красный, желтый, зеленый. Пешеходные светофоры бывают двухсекционные и имеют два вертикально расположенных сигнала с изображением на них красным цветом стоящего пешехода (запрещающий сигнал) и зеленым цветом идущего пешехода (разрешающий сигнал). Пешеходные светофоры размещают на тротуарах с обеих сторон проезжей части. В некоторых случаях движение на дорогах может регулировать регулировщик. Он может подавать сигналы руками, положением корпуса, при помощи жезла и флажков. Регулировщик находится в центре перекрестка, на линии, разделяющей встречные потоки транспорта, или на краю проезжей части. Сигналы, подаваемые регулировщиком с центра перекрестка или с осевой линии дороги, обязательны для всех участников дорожного движения. Это должен знать каждый · Пешеходы должны двигаться по тротуарам или пешеходным дорожкам, а при их отсутствии — по обочинам. · При отсутствии тротуаров, пешеходных дорожек или обочин, а также в случае невозможности двигаться по ним, пешеходы могут двигаться по велосипедной дорожке или идти в один ряд по краю проезжей части (на дорогах с разделительной полосой — по внешнему краю проезжей части). · При движении по краю проезжей части пешеходы должны идти навстречу движению транспортных средств. Лица, передвигающиеся в инвалидных колясках без двигателя, ведущие мотоцикл, мопед, велосипед, в этих случаях должны следовать по ходу движения транспортных средств. · При движении по обочинам или краю проезжей части в темное время суток или в условиях недостаточной видимости пешеходам рекомендуется иметь при себе предметы со светоотражающими элементами и обеспечивать видимость этих предметов водителями транспортных средств. · Движение организованных пеших колонн по проезжей части разрешается только по направлению движения транспортных средств по правой стороне не более чем по четыре человека в ряд. Спереди и сзади колонны с левой стороны должны находиться сопровождающие с красными флажками, а в темное время суток и в условиях недостаточной видимости — с включенными фонарями: спереди — белого цвета, сзади — красного. · Группы детей разрешается водить только по тротуарам и пешеходным дорожкам, а при их отсутствии — и по обочинам, но лишь в светлое время суток и только в сопровождении взрослых. · Пешеходы должны пересекать проезжую часть по пешеходным переходам, в том числе по подземным и надземным, а при их отсутствии — на перекрестках по линии тротуаров или обочин. · При отсутствии в зоне видимости перехода или перекрестка разрешается переходить дорогу под прямым углом к краю проезжей части на участках без разделительной полосы и ограждений там, где она хорошо просматривается в обе стороны. Правильное движение пешеходов по загородной дороге: · В местах, где движение регулируется, пешеходы должны руководствоваться сигналами регулировщика или пешеходного светофора, а при его отсутствии — транспортного светофора. · На нерегулируемых пешеходных переходах пешеходы могут выходить на проезжую часть после того, как оценят расстояние до приближающихся транспортных средств, их скорость и убедятся, что переход будет для них безопасен. При пересечении проезжей части вне пешеходного перехода пешеходы, кроме того, не должны создавать помех для движения транспортных средств и выходить из-за стоящего транспортного средства или иного препятствия, ограничивающего обзорность, не убедившись в отсутствии приближающихся транспортных средств. · Выйдя на проезжую часть, пешеходы не должны задерживаться или останавливаться, если это не связано с обеспечением безопасности движения. · На остановочных пунктах, не оборудованных приподнятыми посадочными площадками, разрешается выходить на проезжую часть для посадки в транспортное средство лишь после его остановки. После высадки необходимо, не задерживаясь, освободить проезжую часть. Запомните! Проезжую часть дороги пешеходы переходят по пешеходным переходам или на перекрестках. Перекресток — это место, на котором пересекаются две или более дорог. Обязанности пассажира В соответствии с требованиями Правил дорожного движения пассажиры обязаны при поездке на транспортном средстве, оборудованном ремнями безопасности, быть пристегнутыми ими, а при поездке на мотоцикле быть в застегнутом мотошлеме. Это интересно Приведем пожелания для пешеходов известного писателя, путешественника и специалиста по вопросам выживания в экстремальных условиях А. А поскольку в дорожной практике нашей страны до этого еще очень далеко, Андрей Ильин предлагает пешеходу видеть дорогу глазами водителя. Статистика Уровень культуры водителей в области безопасности характеризует неутешительная статистика: 70-75% дорожно-транспортных происшествий совершается в нашей стране по вине водителей, при этом до 30% ДТП приходится на долю водителей, управляющих транспортным средством в нетрезвом состоянии. Культура нашего пешехода в области безопасности оценивается не только знаниями Правил дорожного движения и уровнем дисциплины по их выполнению, но и умением оценивать обстановку на дорогах, действовать в различных дорожных ситуациях с учетом своих возможностей более осторожно и предусмотрительно. Контрольные вопросы 1. Что такое дорога и каковы ее составные части? 2. Для чего предназначено регулирование дорожного движения и при помощи чего оно осуществляется? 3. Кто является участниками дорожного движения и какие общие обязанности определены пешеходу и пассажиру? 4. Какие меры безопасности необходимо соблюдать пешеходу и пассажиру как участникам дорожного движения? 5. Какие качества пешехода могут характеризовать уровень его общей культуры в области безопасности дорожного движения? Задания 1. Из Правил дорожного движения выберите дорожные знаки, которые регулируют движение пешехода но дороге.
Практическая работа Изучение моделей поведения пешеходов, велосипедистов, пассажиров и водителей транспортных средств при организации дорожного движения. Задание 1. Раскрыть поведение пешеходов, велосипедистов, пассажиров и водителей транспортных средств, при организации дорожного движения. 2. Познакомиться поведение пешеходов, велосипедистов, пассажиров и водителей транспортных средств при организации дорожного движения.
з. Посмотреть видео материал https://www.youtube.com/watch?v=JnahHiUVBGc 4. Составить конспект 5. Составить вопросы Описать поведение пешеходов, велосипедистов, пассажиров и водителей транспортных средств, при организации дорожного движения. Для передвижения люди пользуются общественным транспортом, личными транспортными средствами (автомобилями, мотоциклами, велосипедами) или идут пешком. Все они являются участниками дорожного движения. Участник дорожного движения — это лицо, принимающее непосредственное участие в движении в качестве водителя, пешехода, пассажира транспортного средства. Для того чтобы это движение носило упорядоченный характер и обеспечивало всем участникам возможность быстро и безопасно двигаться в необходимом им направлении, они должны соблюдать определенные правила, которые регулируют движение на улицах и дорогах. 1234Следующая ⇒ Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим… Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)… Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции… Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций…
|

 ..
..
 Это Правила дорожного движения.
Это Правила дорожного движения. Разделительная полоса разделяет смежные проезжие части и не предназначена для движения или остановки транспортных средств и пешеходов. Разделительная полоса (как и тротуар) немного возвышается над проезжей частью дороги. На разделительной полосе может быть устроен газон или установлены ограждения.
Разделительная полоса разделяет смежные проезжие части и не предназначена для движения или остановки транспортных средств и пешеходов. Разделительная полоса (как и тротуар) немного возвышается над проезжей частью дороги. На разделительной полосе может быть устроен газон или установлены ограждения.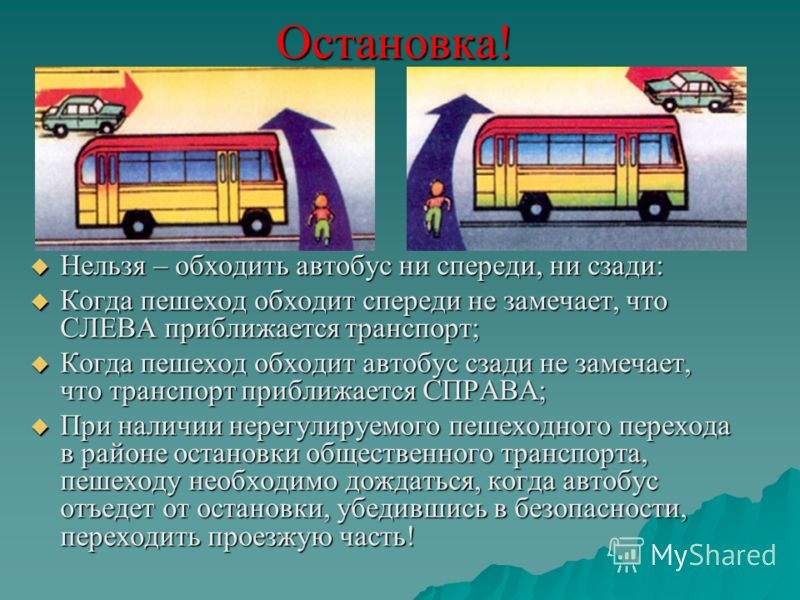 Сервиса.
Сервиса. Транспортные трехсекционные вертикальные светофоры могут иметь расположенные по горизонтали дополнительные секции со стрелками зеленого цвета, указывающими направление движения транспортных средств.
Транспортные трехсекционные вертикальные светофоры могут иметь расположенные по горизонтали дополнительные секции со стрелками зеленого цвета, указывающими направление движения транспортных средств.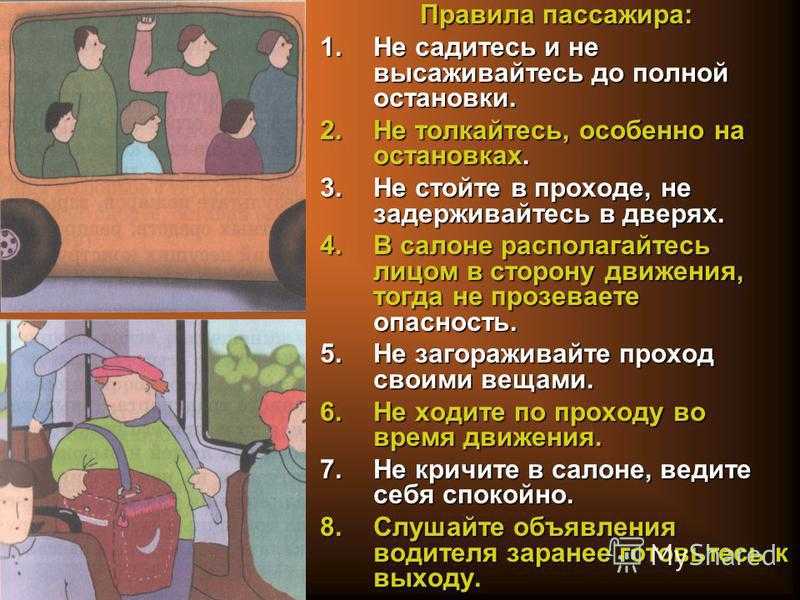 Пешеходы, перевозящие или переносящие громоздкие предметы, а также лица, передвигающиеся в инвалидных колясках без двигателя, могут двигаться по краю проезжей части, если их движение по тротуарам или обочинам создает помехи для других пешеходов.
Пешеходы, перевозящие или переносящие громоздкие предметы, а также лица, передвигающиеся в инвалидных колясках без двигателя, могут двигаться по краю проезжей части, если их движение по тротуарам или обочинам создает помехи для других пешеходов.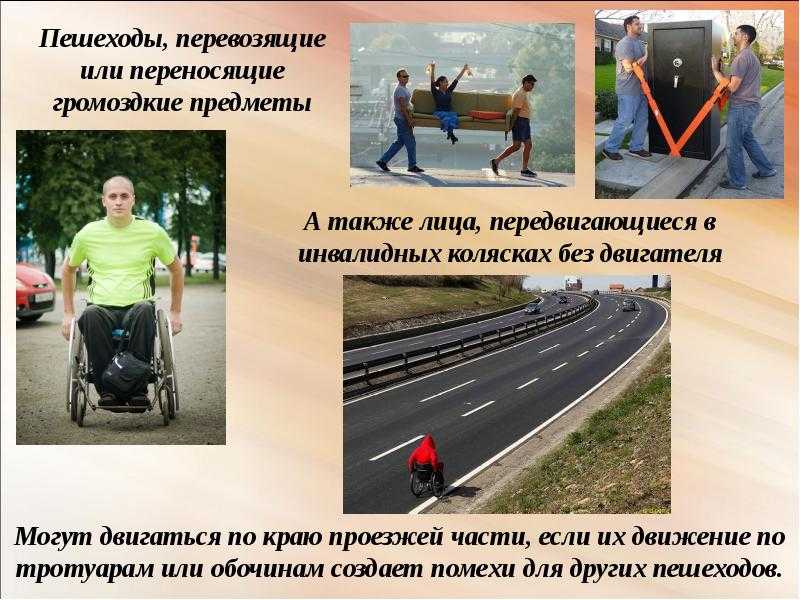

 Пешеходы, не успевшие закончить переход, должны остановиться на линии, разделяющей транспортные потоки противоположных направлений. Продолжать переход можно, лишь убедившись в безопасности дальнейшего движения, и с учетом сигнала светофора (регулировщика).
Пешеходы, не успевшие закончить переход, должны остановиться на линии, разделяющей транспортные потоки противоположных направлений. Продолжать переход можно, лишь убедившись в безопасности дальнейшего движения, и с учетом сигнала светофора (регулировщика). А. Ильина из его книги «Большая энциклопедия городского выживания» (М.: ЭКСМО, 2003), которые учитывают общую культуру в области безопасности наших участников дорожного движения: «Современные водители пешеходов не любят и их права не уважают. Если бы все владельцы автомототранспорта приняли несложную истину, что пешеход всегда прав, но даже если не прав, это не повод его давить, по улицам можно было бы ходить, задрав голову к небу».
А. Ильина из его книги «Большая энциклопедия городского выживания» (М.: ЭКСМО, 2003), которые учитывают общую культуру в области безопасности наших участников дорожного движения: «Современные водители пешеходов не любят и их права не уважают. Если бы все владельцы автомототранспорта приняли несложную истину, что пешеход всегда прав, но даже если не прав, это не повод его давить, по улицам можно было бы ходить, задрав голову к небу». Помните поговорку: «Береженого Бог бережет!»
Помните поговорку: «Береженого Бог бережет!»
 Это Правила дорожного движения.
Это Правила дорожного движения.Изучение модели поведения пешеходов пассажиров водителей транспортных средств презентация, доклад, проект
Изучение модели поведения пешеходов пассажиров водителей транспортных средств при организации дорожного движения
Выполнил Нестеренко Максим
Студент ОГАПОУ «Валуйский колледж»
Согласно ПДД, пешеход в праве:
Осуществлять передвижение по специально отведенным для этого местам –дорожкам, тротуарам, обочинам навстречу движению.
Останавливаться на островках безопасности.
Переходить дорогу в предусмотренных для этого местах – по «зебре», через подземный или надземный переход.
Руководствоваться сигналами регулировщика, при его наличии.
Движение пеших колон осуществляется навстречу транспортным средствам, не более чем по 4 человека. Также спереди и сзади должны находиться красные флажки и фонари (в темное время суток).
Что нельзя
Пешеходам категорически запрещается:
Перебегать дорогу.
Игнорировать сигналы светофора или регулировщика.
Передвигаться по дорожному покрытию, мешая движению автомобилей.
Выходить на проезжую часть из-за транспортного средства, так как другие машины могут вас не увидеть.
Пассажир
Даже пассивные участники должны придерживаться ПДД. Пассажирами принято считать лиц, которые находятся в транспорте, не управляя им.
Пассажир
Что можно
В обязанности пассажира общественного транспорта (метро, автобус, троллейбус, трамвай, маршрутное такси) входит обязательная оплата проезда и багажа в соответствии с установленными тарифами в конкретном регионе. Для получения льготы необходимо иметь удостоверение.
Для получения льготы необходимо иметь удостоверение.
Посадка и высадка осуществляется только в строго отведенных местах. Если последние по каким-либо причинам не возможны со стороны тротуара, допустимо делать это со стороны движения машин. Однако только без помех для ДД.
Пассажиры обязаны соблюдать технику безопасности: пристёгивать ремни, держаться за поручни, быть в шлеме при поездке на мотоцикле или мопеде.
Пассажир
Что нельзя
Пассажирам категорически запрещено игнорировать технику безопасности в салоне, отвлекать водителя. Нельзя требовать остановки в неположенном для этого месте.
Пассажирам общественного транспорта запрещено стоять около двери или опираться на нее, а также самостоятельно открывать. Недопустимо высовывать голову, руки или иные части тела в окно при скоростном движении.
Кроме того, в общественном транспорте запрещено переводить взрывоопасные грузы, химические или ядовитые вещества.
При движении в грузовом автомобиле нельзя сидеть на бортах или грузах, которые выступают за пределы кузова.
Модель поведения пассажиров при организации дорожного движения зависит от ситуации. Строгое соблюдение правил защитит от штрафов, аварий, увечий и даже смерти
Водитель
Здесь нюансов больше. Модели поведения для водителей при организации дорожного движения обязательны. Это самые главные участники дорожного движения, ведь от их знания ПДД и решений зависит собственная жизнь, пешеходов и пассажиров.
Водитель
Что можно
Водителю разрешено осуществлять движение согласно ПДД. Он в праве перевозить пассажиры и грузы при наличии соответствующей лицензии. Последнее относится к водителю общественного транспорта.
Он может пользоваться стоянками для автомобилей – платными, бесплатными.
В случае экстренной поломки водителю разрешено остановиться в любом месте, включив аварийный сигнал и выставив знак остановки. Исключение составляют мосты, тоннели. Машину придётся откатить.
Исключение составляют мосты, тоннели. Машину придётся откатить.
В обязанности водителя также входит поддержание транспортного средства в рабочем состоянии.
Водитель
Что нельзя
Водителю категорически запрещено садиться за руль без прав соответствующей категории, в алкогольном или наркотическом опьянении. Также передавать управление вышеупомянутым.
Водитель не может игнорировать ПДД, сигналы светофора и регулировщика. Он всегда должен быть пристёгнут ремнем безопасности.
Запрещено пресекать организованные колонны (как пешие, так и транспортные), разговаривать по телефону, превышать скоростной режим, управлять автомобилем, не прошедшим техосмотр.
Штрафы
С наказанием строго. За нарушение установленных правил любым из участников движения предусматриваются штрафные санкции. Они делятся на создающие помехи для движения и нет.
Трактовка штрафов ГИБДД и сумма может менять каждый год. Поэтому, при необходимости, лучше отслеживать обновления на официальном сайте.
Модель поведения при организации дорожного движения – очень важный аспект для каждого человека. От этого зависят безопасность и жизнь. К задачам модели поведения можно отнести коррекцию действий во избежание ДТП, а также формирования определенного мышления и поведения.
Закладывать правила дорожного движения нужно с самого детства. Однако лучшим примером является хорошее поведение взрослых.
Спасибо за внимание!
Скачать презентацию
Имитационная модель интерактивного поведения пешеходов
Автор
Перечислено:
- Чжан Ци
- Хань, Баомин
Зарегистрирован:
Реферат
В данной статье представлена имитационная модель коллективного поведения пешеходов. Предполагается, что пешеходы принимают индивидуальные решения во время движения в соответствии со своими пожеланиями и взаимодействием с другими пешеходами. Эффект сопровождения, сдерживающий эффект и эффект отторжения выдвигаются как латентные интерактивные эффекты, влияющие на решения пешеходов. Были определены три категории потенциальных полей для моделирования поведения пешеходов путем имитации процессов принятия решений пешеходами. Потенциальное поле обстоятельств было определено для имитации желания целей. Для моделирования взаимодействия были определены движущиеся и ждущие потенциальные поля. Были проведены эксперименты для проверки модели и проверки эффективности коэффициентов. Изучены характеристики и отношения коэффициента чувствительности, коэффициента затухания и коэффициента диффузии, чтобы прояснить эффективность и гибкость представленной модели при создании движения пешеходов в различных ситуациях. Результаты моделирования показывают хорошую производительность модели при отражении интерактивного поведения пешеходов.
Предполагается, что пешеходы принимают индивидуальные решения во время движения в соответствии со своими пожеланиями и взаимодействием с другими пешеходами. Эффект сопровождения, сдерживающий эффект и эффект отторжения выдвигаются как латентные интерактивные эффекты, влияющие на решения пешеходов. Были определены три категории потенциальных полей для моделирования поведения пешеходов путем имитации процессов принятия решений пешеходами. Потенциальное поле обстоятельств было определено для имитации желания целей. Для моделирования взаимодействия были определены движущиеся и ждущие потенциальные поля. Были проведены эксперименты для проверки модели и проверки эффективности коэффициентов. Изучены характеристики и отношения коэффициента чувствительности, коэффициента затухания и коэффициента диффузии, чтобы прояснить эффективность и гибкость представленной модели при создании движения пешеходов в различных ситуациях. Результаты моделирования показывают хорошую производительность модели при отражении интерактивного поведения пешеходов.
Предлагаемое цитирование
« Имитационная модель интерактивного поведения пешеходов «,
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 390(4), страницы 636-646.
Обработчик: RePEc:eee:phsmap:v:390:y:2011:i:4:p:636-646
DOI: 10.1016/j.physa.2010.10.029
как
HTMLHTML с абстрактным простым текстомпростой текст с абстрактнымBibTeXRIS (EndNote, RefMan, ProCite)ReDIFJSON
Скачать полный текст от издателя
URL-адрес файла: http://www.sciencedirect.com/science/article/pii/S0378437110008873
Ограничение на загрузку: Полный текст только для подписчиков ScienceDirect. Журнал предлагает возможность сделать статью доступной в Интернете непосредственно на сайте Science за плату в размере 3000 долларов США. : если доступ ограничен и если ваша библиотека использует эту услугу, LibKey перенаправит вас туда, где вы можете использовать свою библиотечную подписку для доступа к этому элементу
—>
Поскольку доступ к этому документу ограничен, вы можете поискать другую его версию.
Каталожные номера указаны в IDEAS
как
HTMLHTML с абстрактным простым текстомпростой текст с абстрактнымBibTeXRIS (EndNote, RefMan, ProCite)ReDIFJSON
- Блю, Виктор Дж. и Адлер, Джеффри Л., 2001 г.
« Микромоделирование клеточных автоматов для моделирования двунаправленных пешеходных дорожек ,»
Транспортные исследования, часть B: методологические, Elsevier, vol. 35(3), стр. 293-312, март. - Уильям Лам, Джоди Ли и К. Ченг, 2002 г.
» Исследование характеристик двунаправленного пешеходного потока на сигнальных пешеходных переходах в Гонконге ,»
Транспорт, Springer, vol. 29(2), страницы 169-192, май. - Burstedde, C & Klauck, K & Schadschneider, A & Zittartz, J, 2001.
« Моделирование динамики пешехода с помощью двумерного клеточного автомата «,
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 295(3), страницы 507-525. - Гиппс, П.Г. и Маркшо, Б., 1985.
« Модель микромоделирования пешеходных потоков «,
Математика и компьютеры в моделировании (MATCOM), Elsevier, vol. 27(2), страницы 95-105.
27(2), страницы 95-105. - Серж П. Хугендорн и В. Даамен, 2005 г.
« Поведение пешеходов в узких местах «,
Транспортная наука, ИНФОРМЫ, вып. 39(2), страницы 147-159, май.
Полные каталожные номера (включая те, которые не соответствуют элементам в IDEAS)
Цитаты
Цитаты извлекаются проектом CitEc, подпишитесь на его RSS-канал для этого элемента.
как
HTMLHTML с абстрактным простым текстомпростой текст с абстрактнымBibTeXRIS (EndNote, RefMan, ProCite)ReDIFJSON
Процитировано:
- Ву, Пей-Ян и Го, Жэнь-Ён, 2021.
» Моделирование пешеходных потоков через очереди: эффект взаимодействия и угол пересечения ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 570 (С). - Го, Фан и Ли, Синли и Куанг, Хуа и Бай, Ян и Чжоу, Хуаго, 2016 г.
« Модель клеточных автоматов с расширенным потенциалом затрат, учитывающая изменение поведения пешеходного потока ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 462(С), страницы 630-640.
462(С), страницы 630-640. - Ли, Синли и Го, Фан и Куан, Хуа и Чжоу, Хуаго, 2017 г.
» Влияние психологического напряжения на встречный поток пешеходов через расширенное поле потенциальных затрат модель 9 клеточного автомата0023 ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 487(С), страницы 47-57. - Родригес Э. и Эспиноса-Паредес Г. и Альварес-Рамирес Дж., 2014 г.
» Эффекты конвекции-диффузии в динамике марафонского забега ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 393(С), страницы 498-507. - Чжан Ци, 2015 г.
» Имитационная модель пешехода, движущегося в обоих направлениях, с учетом потенциального эффекта впереди и позади ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 419(С), страницы 335-348.
Наиболее похожие товары
Это элементы, которые чаще всего цитируют те же работы, что и этот, и цитируются теми же работами, что и этот.
- Хагани, Милад, 2021.
» Область знаний о динамике толпы: анатомия области, новаторские исследования, временные тенденции, влиятельные сущности и внешнее влияние ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 580 (С). - Сунь, Лишань и Юань, Гуан и Яо, Лия и Цуй, Ли и Конг, Дьюэнь, 2021.
Изучение стратегий выхода и посадки на станциях метро ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 583 (С). - Абдельгани, Ахмед и Абдельгани, Халед и Махмассани, Хани, 2016 г.
» Гибридная среда моделирования имитационно-назначения для динамики толпы в крупномасштабных пешеходных объектах ,»
Transportation Research Part A: Policy and Practice, Elsevier, vol. 86(С), страницы 159-176. - Лили Лу, А. и Ган Рен, Б. и Вэй Ван, К., и Чинг-Яо Чан, Д., 2015.
Применение имитационной модели пешеходов SFCA к конструкции сигнальной ширины пешеходного перехода ,»
Transportation Research Part A: Policy and Practice, Elsevier, vol. 80(С), страницы 76-89.
80(С), страницы 76-89. - Ямамото, Хироки и Янагисава, Дайчи и Феличиани, Клаудио и Нисинари, Кацухиро, 2019 г.
» Поведение пешеходов при вращении тела для предотвращения столкновений при обгоне и поперечном потоке ,»
Транспортные исследования, часть B: методологические, Elsevier, vol. 122(С), страницы 486-510. - Лю, Сюань и Сун, Вейгуо и Чжан, июнь 2009 г.
« Извлечение и количественный анализ микроскопических характеристик эвакуации на основе цифровой обработки изображений ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 388(13), страницы 2717-2726. - Жуй Цзян, Мао-Бин Ху, Цин-Сун Ву и Вэй-Го Сун, 2017 г.
« Динамика движения велосипедного потока: эксперимент и моделирование »,
Транспортная наука, ИНФОРМЫ, вып. 51(3), страницы 998-1008, август. - Чжоу, Сюэмэй и Ху, Цзинцзе и Цзи, Сянфэн и Сяо, Сюнцзян, 2019 г.
« Моделирование пешеходного потока с помощью сотового автомата с учетом зрения и мультискорости «,
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 514(С), страницы 982-992.
514(С), страницы 982-992. - Чжан Ци, 2015 г.
» Имитационная модель пешехода, движущегося в обоих направлениях, с учетом потенциального эффекта впереди и позади ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 419(С), страницы 335-348. - фон Сиверс, Изабелла и Кестер, Герта, 2015 г.
» Динамическая адаптация длины шага в соответствии с полезностью и личным пространством ,»
Транспортные исследования, часть B: методологические, Elsevier, vol. 74(С), страницы 104-117. - Зейтц, Майкл Дж. и Дитрих, Феликс и Кестер, Герта, 2015 г.
» Влияние наступания на пешеходные траектории ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 421(С), страницы 594-604. - Юэ, Хао и Хао, Херуи и Чен, Сяомин и Шао, Чуньфу, 2007 г.
« Моделирование пешеходного потока на квадратной решетке на основе модели клеточных автоматов ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 384(2), страницы 567-588.
- Дирк Хелбинг и Пратик Мукерджи, «без даты».
«Толповые катастрофы как системные сбои: анализ катастрофы парада любви »,
Рабочие бумаги
ETH-RC-12-010, ETH Zurich, кафедра проектирования систем. - Эдзаки, Такахиро и Янагисава, Даичи и Оцука, Кадзумичи и Нисинари, Кацухиро, 2012 г.
« Моделирование процесса обнаружения пешеходов в пространстве с использованием полевой модели Proxemic Floor «,
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 391(1), страницы 291-299. - Ху, Янхуэй и Чжан, Цзюнь и Сун, Вэйго, 2019 г.
« Экспериментальное исследование стратегий движения людей в разнонаправленных потоках «,
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 534 (С). - Флеттерёд, Гуннар и Ламмель, Грегор, 2015 г.
« Фундаментальная схема двунаправленного пешехода «,
Транспортные исследования, часть B: методологические, Elsevier, vol. 71(С), страницы 194-212. - Сабери, Мид и Агабайк, Кайван и Собхани, Амир, 2015 г.

« Пространственные колебания скорости пешеходов в двунаправленных потоках: изучение эффектов самоорганизации «,
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 434(С), страницы 120-128. - Цуй, Сяотин и Цзи, Цзинвэй и Бай, Сюэхе и Цао, Инь и Ву, Тонг, 2022.
« Исследование и реализация параллельных алгоритмов для крупномасштабной эвакуации толпы в чрезвычайной ситуации ,»
Математика и компьютеры в моделировании (MATCOM), Elsevier, vol. 193(С), страницы 713-724. - Фанг, Чжи-Мин и Сун, Вэй-Го и Лю, Сюань и Лв, Вэй и Ма, Цзянь и Сяо, Ся, 2012 г.
» Модель непрерывного расстояния (CDM) для движения пешеходов в один ряд с учетом частоты и длины шагов ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 391(1), страницы 307-316. - Чжэн, Сяопин и Ли, Вэй и Гуань, Чао, 2010 г.
« Моделирование процессов эвакуации на площади с перегородкой с использованием модели клеточного автомата для динамики пешеходов ,»
Physica A: Статистическая механика и ее приложения, Elsevier, vol. 389(11), страницы 2177-2188.
389(11), страницы 2177-2188.
Подробнее об этом изделии
Ключевые слова
Поведение пешеходов; Взаимодействие; потенциальное поле; Имитационная модель;
Все эти ключевые слова.
Статистика
Доступ и статистика загрузки
Исправления
Все материалы на этом сайте предоставлены соответствующими издателями и авторами. Вы можете помочь исправить ошибки и упущения. При запросе исправления укажите дескриптор этого элемента: RePEc:eee:phsmap:v:390:y:2011:i:4:p:636-646 . См. общую информацию о том, как исправить материал в RePEc.
По техническим вопросам, касающимся этого элемента, или для исправления его авторов, названия, реферата, библиографической информации или информации для загрузки, обращайтесь: . Общие контактные данные поставщика: http://www.journals.elsevier.com/physica-a-statistical-mechpplications/ .
Если вы создали этот элемент и еще не зарегистрированы в RePEc, мы рекомендуем вам сделать это здесь. Это позволяет связать ваш профиль с этим элементом. Это также позволяет вам принимать потенциальные ссылки на этот элемент, в отношении которых мы не уверены.
Это позволяет связать ваш профиль с этим элементом. Это также позволяет вам принимать потенциальные ссылки на этот элемент, в отношении которых мы не уверены.
Если CitEc распознал библиографическую ссылку, но не связал с ней элемент в RePEc, вы можете помочь с помощью этой формы .
Если вы знаете об отсутствующих элементах, ссылающихся на этот, вы можете помочь нам создать эти ссылки, добавив соответствующие ссылки таким же образом, как указано выше, для каждого ссылающегося элемента. Если вы являетесь зарегистрированным автором этого элемента, вы также можете проверить вкладку «Цитаты» в своем профиле RePEc Author Service, так как некоторые цитаты могут ожидать подтверждения.
По техническим вопросам относительно этого элемента или для исправления его авторов, названия, реферата, библиографической информации или информации для загрузки обращайтесь: Кэтрин Лю (адрес электронной почты доступен ниже). Общие контактные данные поставщика: http://www. journals.elsevier.com/physica-a-statistical-mechpplications/ .
journals.elsevier.com/physica-a-statistical-mechpplications/ .
Обратите внимание, что фильтрация исправлений может занять пару недель.
различные услуги RePEc.
Веб-страница Ю Хуанга — Поведение пешеходов и прогнозирование
Abstract : В этой статье предлагается учитывать положение тела пешехода и ориентацию головы/направление взгляда для прогнозирования траектории движения, помимо скорости и местоположения. Модель прогнозирования называется PeekNet .
1. Введение
Для повышения безопасности автономного вождения прогнозирование окружающих транспортных средств и пешеходов является одним из наиболее важных вопросов. При планировании и управлении обнаружение, отслеживание и предотвращение столкновений с препятствиями имеют решающее значение. Обычно при моделировании поведения пешеходов на пешеходной дорожке их взаимодействие с другими участниками дорожного движения может дать подсказки для повышения точности систем прогнозирования. Люди рассматривают этот вид взаимодействия как социальность пешеходов, о которой сообщалось в ранней работе об исключении, т.е. модели социальной силы[1]. В недавней связанной работе применялось глубокое обучение, такое как социальный LSTM[2], Social GAN[3], SoPhie[4], Social Attention[5] и Social Ways[6] и т. д. Стоит отметить, что категоризация пешеходов — это важный ярлык для их поведения, таких как дети, подростки, молодежь, взрослые и пожилые люди. Также вывод о человеческих намерениях и действиях полезен для понимания их социальности.
Люди рассматривают этот вид взаимодействия как социальность пешеходов, о которой сообщалось в ранней работе об исключении, т.е. модели социальной силы[1]. В недавней связанной работе применялось глубокое обучение, такое как социальный LSTM[2], Social GAN[3], SoPhie[4], Social Attention[5] и Social Ways[6] и т. д. Стоит отметить, что категоризация пешеходов — это важный ярлык для их поведения, таких как дети, подростки, молодежь, взрослые и пожилые люди. Также вывод о человеческих намерениях и действиях полезен для понимания их социальности.
Работа по моделированию взаимодействия требует перцептивных признаков взаимодействия, т. е. человеческих сигналов, улавливаемых датчиками (LiDAR, камера, V2X и т. д.). К сожалению, большая часть работы в этой области ограничена скоростью, направлением и траекторией движения пешеходов. Хотя такого рода подсказки могут отражать поведение при взаимодействии, более прямыми подсказками являются стили человеческой деятельности, направление взгляда, поза тела, жесты рук, выражение лица и речевые сигналы, которые еще редко обсуждаются.
Ма и др.[13] смоделировал взаимодействие для прогнозирования с использованием теории игр, приняв ходьбу как марковский процесс принятия решений (MDP) и изучив модель поведения с использованием теории обратного оптимального управления (IOC). Видеоданные камеры фиксируются для оценки траекторий пешеходов с помощью методов компьютерного зрения и классификации их как молодых или пожилых людей, женщин или мужчин. Недостатки заключаются в отсутствии деталей позы тела, жестов рук и ориентации головы/направления взгляда. Кроме того, мы не видим анализа влияния статических препятствий или дорог на поведение человека.
Лян и др. [14] применили компьютерное зрение для извлечения большего количества визуальных характеристик пешеходов и окружающей среды и предоставили сквозную систему обучения для прогнозирования активности пешеходов, включающую четыре модуля, то есть модуль поведения пешеходов, модель взаимодействия пешеходов, модуль генерации пешеходных траекторий и активность. модуль прогнозирования. Первые два модуля обеспечивают извлечение признаков, а последние два модуля предсказывают траекторию и активность соответственно. Модуль поведения пешехода извлекал особенности тела, такие как обнаружение ключевых точек. Модуль взаимодействия с пешеходом учитывал особенности взаимоотношений с другими целями (автомобилями и людьми) и соседними средами (дорогой, дорожкой или травой). Ограничением этого метода является отсутствие информации о движении лица, например, о выражении лица, взгляде и открытии/закрытии рта. Классификация активности основана на движении и траектории частей тела без выражения лица в качестве подсказки.
модуль прогнозирования. Первые два модуля обеспечивают извлечение признаков, а последние два модуля предсказывают траекторию и активность соответственно. Модуль поведения пешехода извлекал особенности тела, такие как обнаружение ключевых точек. Модуль взаимодействия с пешеходом учитывал особенности взаимоотношений с другими целями (автомобилями и людьми) и соседними средами (дорогой, дорожкой или травой). Ограничением этого метода является отсутствие информации о движении лица, например, о выражении лица, взгляде и открытии/закрытии рта. Классификация активности основана на движении и траектории частей тела без выражения лица в качестве подсказки.
В этой статье мы явно добавляем позу пешехода, ориентацию головы и направление взгляда в качестве подсказок взаимодействия на основе современных систем прогнозирования поведения и траектории. Модель прогнозирования называется PeekNet .
2. Прогнозирование поведения и траектории пешеходов
Во-первых, давайте представим входные сигналы. Как показано на рисунке 1, транспортная среда представляет собой поперечное сечение с управлением светофором. Транспортные средства (сплошные прямоугольники синего цвета) движутся по горизонтали и вертикали в двух направлениях, полосы разных направлений разделены бордюрами (желтая линия). Теперь сигнал светофора настроен на зеленый для вертикальных направлений, пешеходы (сплошные маленькие прямоугольники синего цвета) находятся на пешеходной дорожке, некоторые из них проходят перекресток (пустые прямоугольники фиолетового цвета). Один автомобиль на вертикальной дороге подъедет к перекрестку для поворота направо (сигнал в виде красной точки справа сзади), он должен уступить пешеходам, но, возможно, протиснуться (зона желтого цвета). Если сигнал светофора сменяется с зеленого на красный, поворот направо выглядит как смена полосы движения (желтая область сменяется розовой). Автомобиль справа тормозит, когда приближается к перекрестку (красная линия сзади), предупреждая автомобиль сзади, чтобы он не ударился хвостом (розовая область).
Как показано на рисунке 1, транспортная среда представляет собой поперечное сечение с управлением светофором. Транспортные средства (сплошные прямоугольники синего цвета) движутся по горизонтали и вертикали в двух направлениях, полосы разных направлений разделены бордюрами (желтая линия). Теперь сигнал светофора настроен на зеленый для вертикальных направлений, пешеходы (сплошные маленькие прямоугольники синего цвета) находятся на пешеходной дорожке, некоторые из них проходят перекресток (пустые прямоугольники фиолетового цвета). Один автомобиль на вертикальной дороге подъедет к перекрестку для поворота направо (сигнал в виде красной точки справа сзади), он должен уступить пешеходам, но, возможно, протиснуться (зона желтого цвета). Если сигнал светофора сменяется с зеленого на красный, поворот направо выглядит как смена полосы движения (желтая область сменяется розовой). Автомобиль справа тормозит, когда приближается к перекрестку (красная линия сзади), предупреждая автомобиль сзади, чтобы он не ударился хвостом (розовая область). Однако возможно проехать на красный свет (светло-желтая область). Еще одна машина слева ждет левого поворота (красная точка слева сзади), мы еще оцениваем возможность проезда на красный свет (тоже светло-желтая зона). Дополнительно следует пояснить один момент: при переключении сигнала светофора на зеленый автомобиль на этой полосе может двигаться прямо или повернуть налево (Примечание: на этом перекрестке нет только полосы для поворота налево), поэтому поворот налево также считается как перестроение (светло-желтая зона), но его приоритет все же меньше, чем у пешеходов в этой ситуации. Пешеходы в безопасности на дорожке, некоторые из них на траве (зеленая зона). черных областей изображены для зданий. Примечание: если нет светофора, вместо него 4-полосные знаки остановки (красная линия на перекрестке, аналогично торможению автомобиля), то правила дорожного движения следуют «Первый пришел, первый проехал».
Однако возможно проехать на красный свет (светло-желтая область). Еще одна машина слева ждет левого поворота (красная точка слева сзади), мы еще оцениваем возможность проезда на красный свет (тоже светло-желтая зона). Дополнительно следует пояснить один момент: при переключении сигнала светофора на зеленый автомобиль на этой полосе может двигаться прямо или повернуть налево (Примечание: на этом перекрестке нет только полосы для поворота налево), поэтому поворот налево также считается как перестроение (светло-желтая зона), но его приоритет все же меньше, чем у пешеходов в этой ситуации. Пешеходы в безопасности на дорожке, некоторые из них на траве (зеленая зона). черных областей изображены для зданий. Примечание: если нет светофора, вместо него 4-полосные знаки остановки (красная линия на перекрестке, аналогично торможению автомобиля), то правила дорожного движения следуют «Первый пришел, первый проехал».
Рисунок 1.
На основе этой сцены входные сигналы системы, показанные на рисунке 2, включают в себя карту дорог (рендерится трава и здания), карту светофоров[15], карту ограничения скорости[15], пешеходную дорожку ( освещенность обратно пропорциональна доступности), карта сигналов транспортного средства (сигнал торможения и смены полосы движения, излучаемый транспортным средством либо передним/задним светом, либо жестом руки водителя/пассажира), карта местоположения препятствия[15], карта истории траектории [15] и карта направления головы/взгляда (если глаза не обнаружены, только голова; если лицо не обнаружено, только поза).
Рисунок 2.
Выходные данные — это будущие траектории всех препятствий, показанные на рисунке 3.
Рисунок 3.
На основе этих входных и выходных сигналов системная диаграмма модели прогнозирования показана на рисунке 4. «Кодировщик» — это модель CNN для извлечения признаков, включая позу пешехода (руки, ноги) и направление взгляда в качестве новых подсказок взаимодействия. «Vehicle LSTM» предсказывает направления транспортных средств, скорость, путевые точки и тепловые карты местоположения, где LSTM [7] — это один из видов RNN [7], учитывающий временную характеристику. Вместо этого «пешеходный LSTM» предсказывает направление, скорость, точки пути и тепловые карты местоположения людей, а также во времени. «Дорожный декодер» — это модель CNN, которая выводит проезжую часть [15], а окончательные «Полностью связанные слои» выводят визуализированную будущую карту траекторий пешеходов и транспортных средств.
Рисунок 4.
При обучении модели функция потерь включает имитационные потери (реконструированные изображения вида с высоты птичьего полета, показанные на рисунке 2), период столкновения транспортного средства, показатель области движения транспортного средства, период движения транспортного средства по дороге, геометрические потери транспортного средства (путь баллов), термин столкновения пешехода с транспортным средством и термин пешехода на пешеходной дорожке.
Потери при имитации такие же, как у ChaufferNet [15]. Давайте определим другие термины, как показано ниже.
Предположим, что сигнал светофора транспортного средства — S_vehicle (область, вызванная сигналом транспортного средства), тепловая карта прогнозируемого местоположения транспортного средства и истинное местоположение — Obj_vehicle и Obj_vehicle_GT, тогда термин столкновения транспортного средства определяется как:
, где namda — это вес светофора транспортного средства, 0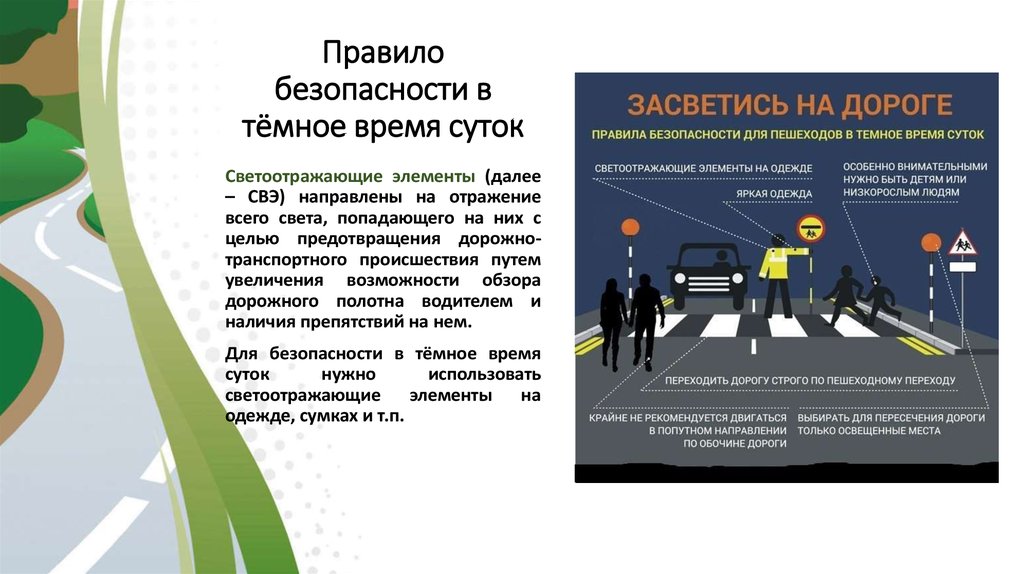
Предположим, что прогнозируемая область движения и ее истинная область являются соответственно R_vehicle и R_vehicle_GT, тогда член области движения определяется как
Член движения транспортного средства:
Кроме того, геометрические потери транспортного средства происходят из прогнозируемой области траектории транспортного средства. , предположим, что истинная область (бинарная карта) — G_vehicle_GT, тогда геометрические потери транспортного средства:
Предположим, что тепловой картой прогнозируемого местоположения пешеходов является Obj_pedestrian, прогнозируемая карта доступности для пешеходов и ее истинная карта имеют значения T_pedestrian и T_pedestrian_GT соответственно, тогда термин столкновения транспортного средства с пешеходом:
Наконец, термин пешехода на пешеходной дорожке определяется как . г) для оценки выборки используется обучающая информация или генератор. Генератор оригинальной GAN[8] нуждается в вводе шума (например, распределения Гаусса) для генерации данных, но условный GAN[9]] позволяет одновременно вводить другой сигнал как в G, так и в D. На рисунке 5 восемь отображаемых карт вводят кодировщик, а выходные карты объектов подаются в G. Три модуля в G такие же, как на рисунке 4, и G вывод передается D, чтобы решить, правда это или подделка. В D «Классификатор LSTM» представляет собой модель классификации временной последовательности на основе LSTM, а «Полностью подключенный уровень» показывает результат решения.
На рисунке 5 восемь отображаемых карт вводят кодировщик, а выходные карты объектов подаются в G. Три модуля в G такие же, как на рисунке 4, и G вывод передается D, чтобы решить, правда это или подделка. В D «Классификатор LSTM» представляет собой модель классификации временной последовательности на основе LSTM, а «Полностью подключенный уровень» показывает результат решения.
Далее мы объясним, как оценить позу пешехода, ориентацию головы и направление взгляда, как показано на рисунке 6. Оценка положения тела предлагается с использованием OpenPose[10] (показан на рисунке 7), оценка направления взгляда выполняется с помощью глубокого модель обучения [11] (показана на рисунке 8), а ориентация головы оценивается с помощью модели глубокого обучения без ключевой точки [12] (показана на рисунке 9).). Если глаза не распознаются, мы пытаемся заменить распознавание лица для ориентации головы. Если обнаружение лица не удается, берется состояние головы в результате оценки позы тела.
Рисунок 6.
Рисунок 7.
Рисунок 8.
Рисунок 9.
Если применить эту модель для боковых камер, наблюдающих сзади, мы можем обнаружить и распознать сигнал переднего света (кроме сигнала торможения и заднего хода). ) слишком. Чтобы построить работоспособную систему, ее необходимо соединить с детектором/трекером транспортных средств [17], показанным на рисунке 10.
Рисунок 10.
На рисунке 11 показаны два разных модуля для распознавания жестов рук. После запуска обнаружения-отслеживания-классификации для фронтальной камеры мы будем различать полицию, пешехода, транспортное средство, велосипедиста и автомобилиста; для боковой камеры заднего обзора нам нужно только классифицировать транспортные средства и велосипедистов/автомобилистов. Модель оценки позы относится к OpenPose[10], а сигнал жеста руки может быть распознан моделью CNN-LSTM.
Рис. 11.
3. Резюме
Резюме
В этой статье прогнозирование траекторий транспортных средств и пешеходов объединено в рамках глубокого обучения PeekNet , при этом основное внимание уделяется пешеходам. При извлечении признаков взаимодействия мы добавляем направление головы/взгляда для явного учета движения лица в модели поведения.
Ссылка
1. Д. Хелбинг, П. Молнар. «Модель социальной силы для пешеходной динамики». Физический обзор Е, 51(5):4282, 1995
2. A. Alahi et al., «Social LSTM: Прогнозирование траектории человека в людных местах», IEEE CVPR 2016
3. A. Gupta et al. «Social GAN: социально приемлемые траектории с генеративно-состязательными сетями», IEEE CVPR, 2018
4. A Sadeghian et al. «Софи: внимательный GAN для прогнозирования путей, соответствующих социальным и физическим ограничениям», arXiv 1806.01482, 2018.
5. A Vemula, K. Muelling, J. Oh. «Социальное внимание: моделирование внимания в толпе людей». ИИЭР ИКРА 2018.
A Vemula, K. Muelling, J. Oh. «Социальное внимание: моделирование внимания в толпе людей». ИИЭР ИКРА 2018.
6. Дж. Амириан и др., «Социальные способы: изучение мультимодальных распределений пешеходных траекторий с помощью GAN», Семинар IEEE CVPR, 2019
7. Я Гудфеллоу и др., «Глубокое обучение», MIT Press, 2016.
8. И. Гудфеллоу и др., «Генеративно-состязательные сети», NIPS, 2014
9. М. Мирза, С. Осиндеро, «Условно-генеративно-состязательные сети», arXiv:1411.1784, 2014
10. Z Cao et al. , «OpenPose: оценка 2D-позы нескольких человек в реальном времени с использованием полей сходства частей», arXiv: 1812.08008, 2018
11. S Park et al, «Учимся находить ориентиры области глаза для дистанционной оценки взгляда в условиях без ограничений», arXiv 1805.04771, 2018
12. N. Ruiz, E. Chong, J. M. Rehg. «Точная оценка позы головы без ключевых точек». arXiv, 1710.00925, 2017.
. 13. W Ma и др., «Прогнозирование интерактивной динамики пешеходов с помощью фиктивной игры», IEEE CVPR 2017
. и местоположения в видео», IEEE CVPR 2019
15. M Bansal et al., «ChauffeurNet: обучение вождению путем имитации лучшего и синтеза худшего», arXiv 1812.03079, 2018
16. D Frossard, E Kee, R Urtasun, «DeepSignals: Predicting Intent of Drivers Через визуальные сигналы», ICRA, 2019
17. В. Луо, Б. Ян, Р. Уртасун, «Форсаж: сквозное 3D-обнаружение, отслеживание и прогнозирование движения в реальном времени с помощью единой сверточной сети», IEEE CVPR 2018
18. H Kretzschmar, J Zhu, «Обнаружение сигналов рукой велосипедиста с помощью автономного транспортного средства», патент Google, US 9,014.905 B1, апрель, 2015 г.
Intend-Wait-Cross: на пути к моделированию реалистичного поведения при пешеходном переходе
Введение
Понимание и моделирование поведения пешеходов имеют основополагающее значение для многих приложений, включая анализ и контроль транспортных потоков, городское планирование и, в последнее время, интеллектуальные системы вождения. Учитывая критический характер последних с точки зрения безопасности, существует острая потребность в данных для обучения и оценки предлагаемых алгоритмических решений до их развертывания на дорогах.
Учитывая критический характер последних с точки зрения безопасности, существует острая потребность в данных для обучения и оценки предлагаемых алгоритмических решений до их развертывания на дорогах.
Одной из самых сложных проблем в области вождения является учет поведения участников дорожного движения для планирования и контроля. Сбор натуралистических данных с использованием транспортных средств с приборами стал бесценным источником для таких исследований [23] . В последнее время как в академических кругах, так и в промышленности имитационное моделирование стало дополнительным способом изучения различных результатов сценариев вождения и моделирования аномальных событий (например, столкновений и аварий), которые трудно зарегистрировать с помощью традиционных методов из-за их редкости9.0385 [9] . Однако полезность симуляций зависит от реалистичности поведения участников виртуального движения.
Уязвимые категории участников дорожного движения, такие как пешеходы, потенциально могут извлечь наибольшую выгоду из улучшений безопасности, обеспечиваемых технологиями. Поскольку при пересечении дорог пешеходы сталкиваются с конфликтами с другими участниками дорожного движения, моделирование процесса принятия решений на пешеходных переходах имеет первостепенное значение. Десятилетия исследований показывают, что пешеходы демонстрируют широкий диапазон моделей поведения, на которые может влиять множество факторов, включая индивидуальные характеристики пешеходов (например, демографические) и условия окружающей среды [18] . Таким образом, для точного моделирования аспектов принятия решений на пешеходном переходе мы предлагаем агентное моделирование, основанное на литературе по поведению на дорогах.
Поскольку при пересечении дорог пешеходы сталкиваются с конфликтами с другими участниками дорожного движения, моделирование процесса принятия решений на пешеходных переходах имеет первостепенное значение. Десятилетия исследований показывают, что пешеходы демонстрируют широкий диапазон моделей поведения, на которые может влиять множество факторов, включая индивидуальные характеристики пешеходов (например, демографические) и условия окружающей среды [18] . Таким образом, для точного моделирования аспектов принятия решений на пешеходном переходе мы предлагаем агентное моделирование, основанное на литературе по поведению на дорогах.
Рис. 1: Принятие решения пешеходом о переходе улицы (красная стрелка) или регулируемом переходе (зеленая стрелка). Для перехода в неположенном месте время до столкновения (TTC) оценивается для всех соответствующих транспортных средств (показаны красным цветом). Нерелевантные транспортные средства показаны серым цветом.
II Связанная работа
Проведен большой объем работ по моделированию взаимодействия пешеходов с различными участниками движения, в том числе с другими пешеходами и транспортными средствами [7] . Симуляции обычно подразделяются на макро- и микроскопические, в зависимости от того, сосредоточены ли они на движении транспортных или пешеходных потоков на агрегированном уровне или моделируют отдельных агентов [16] . В микроскопическом моделировании модели на основе агентов стали эффективными инструментами для изучения транспортных взаимодействий [2] . Агентный подход особенно подходит для этой цели, поскольку характеристики, принятие решений и действия каждого агента рассматриваются индивидуально, а сложные взаимодействия между несколькими разнородными сущностями порождают возникающие явления, которые может быть трудно запрограммировать в явном виде [3] .
Симуляции обычно подразделяются на макро- и микроскопические, в зависимости от того, сосредоточены ли они на движении транспортных или пешеходных потоков на агрегированном уровне или моделируют отдельных агентов [16] . В микроскопическом моделировании модели на основе агентов стали эффективными инструментами для изучения транспортных взаимодействий [2] . Агентный подход особенно подходит для этой цели, поскольку характеристики, принятие решений и действия каждого агента рассматриваются индивидуально, а сложные взаимодействия между несколькими разнородными сущностями порождают возникающие явления, которые может быть трудно запрограммировать в явном виде [3] .
Предложен ряд моделей принятия решения о переходе на нерегулируемых пешеходных переходах [14, 15, 10, 25] и при переходе пешеходов [21, 15, 22] в неположенном месте, сценариях, представляющих наибольший риск для пешеходов.
Принятие пробела является одним из наиболее важных факторов, влияющих на поведение пешеходов, и обычно включается в модели принятия решений. Обычно безопасность разрыва определяется на основе времени до столкновения (TTC) и времени, которое требуется пешеходу, чтобы перейти улицу. Другие факторы часто включаются, чтобы лучше фиксировать изменения в наблюдаемом поведении пешеходов. Например, Feliciani et al. [10] назначает разную скорость ходьбы пожилым и взрослым пешеходам и моделирует переход как многоэтапный процесс, в котором пешеходы сначала оценивают безопасное расстояние для ближайшей полосы и проверяют безопасность дальней полосы при переходе. Сух и др. [21] различают уступчивых пешеходов и пешеходов, ищущих пробелы. Первые всегда пересекаются при зеленом сигнале, а вторые могут пересекаться при красном сигнале (учитывая разрыв в 4-6 секунд).
Обычно безопасность разрыва определяется на основе времени до столкновения (TTC) и времени, которое требуется пешеходу, чтобы перейти улицу. Другие факторы часто включаются, чтобы лучше фиксировать изменения в наблюдаемом поведении пешеходов. Например, Feliciani et al. [10] назначает разную скорость ходьбы пожилым и взрослым пешеходам и моделирует переход как многоэтапный процесс, в котором пешеходы сначала оценивают безопасное расстояние для ближайшей полосы и проверяют безопасность дальней полосы при переходе. Сух и др. [21] различают уступчивых пешеходов и пешеходов, ищущих пробелы. Первые всегда пересекаются при зеленом сигнале, а вторые могут пересекаться при красном сигнале (учитывая разрыв в 4-6 секунд).
Более подробные характеристики пешеходов представлены в модели поведения пешеходов, переходящих улицу, Wang et al. [22] , где решение о пересечении зависит от эффективности, безопасности и справедливости маршрута, а также от прошлых решений о пересечении. Веса для каждого свойства определяются с использованием данных наблюдений. После того, как решение перейти дорогу в неположенном месте принято, пешеходы ждут достаточно большого промежутка (TTC> 3 с), чтобы начать переход. Другой подход к учету человеческого фактора предложен Papadimitrou et al. [15]
Веса для каждого свойства определяются с использованием данных наблюдений. После того, как решение перейти дорогу в неположенном месте принято, пешеходы ждут достаточно большого промежутка (TTC> 3 с), чтобы начать переход. Другой подход к учету человеческого фактора предложен Papadimitrou et al. [15]
. Они моделируют переход как последовательную логит-модель, где на каждом шагу пешеход выбирает переходить дорогу, идти к перекрестку или не переходить дорогу. На выбор влияют тип дороги, плотность движения, предыдущий выбор, сигнал светофора, склонность человека к риску и скорость ходьбы (на основании наблюдения, что более быстрые пешеходы с большей вероятностью перейдут середину квартала). Параметры модели оцениваются по данным опроса.
Хотя подходы на основе агентов эффективны для имитации поведения пешеходов при переходе, они имеют ограниченную полезность для приложений интеллектуального вождения. Многие аспекты существующих моделей пешеходов зависят от конкретной ситуации. Например, свойства окружающей среды (схема дороги, транспортный поток и т. д.) часто жестко определены. Точно так же характеристики пешеходов обычно ограничиваются несколькими параметрами, чтобы обеспечить соответствие полевым данным. Поэтому неясно, можно ли легко адаптировать такие симуляции к широкому кругу сценариев и генерировать достаточно разнообразную популяцию агентов. Другие ограничения касаются поведения при переходе, в частности, упрощенной оценки доступного промежутка для перехода в пробке и жестких шагов по принятию решений, адаптированных для конкретных ситуаций.
Например, свойства окружающей среды (схема дороги, транспортный поток и т. д.) часто жестко определены. Точно так же характеристики пешеходов обычно ограничиваются несколькими параметрами, чтобы обеспечить соответствие полевым данным. Поэтому неясно, можно ли легко адаптировать такие симуляции к широкому кругу сценариев и генерировать достаточно разнообразную популяцию агентов. Другие ограничения касаются поведения при переходе, в частности, упрощенной оценки доступного промежутка для перехода в пробке и жестких шагов по принятию решений, адаптированных для конкретных ситуаций.
Мы решаем некоторые из этих проблем в предлагаемой модели поведения на пешеходном переходе, вводя следующее:
Очень разнообразная группа агентов с интуитивно понятными параметрами, которые можно установить на основе полевых данных или с использованием значений из литературы;
Модель дискретного выбора для нескольких сценариев пересечения и поведения без пересечения;
Усовершенствованный расчет времени до столкновения с учетом значимости нескольких взаимодействующих агентов, динамических факторов и шума, воспринимаемого пешеходами;
Многоцелевая реализация, подходящая для моделирования широкого спектра сценариев на зрелой платформе моделирования трафика с открытым исходным кодом.
III Модель решения пешехода
Рис. 2: Схема предлагаемой модели решения пешехода. Сегменты диаграммы имеют следующую цветовую кодировку: синий — генерация агента, коричневый — непешеходные виды транспорта, серый — активность вне транзитного режима, фиолетовый — ходьба без перехода, желтый — переход для пешеходов со средним соблюдением закона, зеленый — переход для законопослушных пешеходов, красный — переход для пешеходов-нарушителей. Ромбовидные прямоугольники соответствуют решениям «да-нет», прямоугольные прямоугольники обозначают выполняемые действия. Контур пунктирной рамки указывает на то, что действие выполняется только один раз.
Принятие решений пешеходами можно разделить по уровням на стратегические (откуда пешеходы начинают и куда они идут), тактические (решения, ведущие к месту назначения) и оперативные (как выполняется план) [11] . В следующих разделах мы сосредоточимся на принятии тактических решений, тогда как стратегический и оперативный уровни охватываются реализацией предложенной модели (см.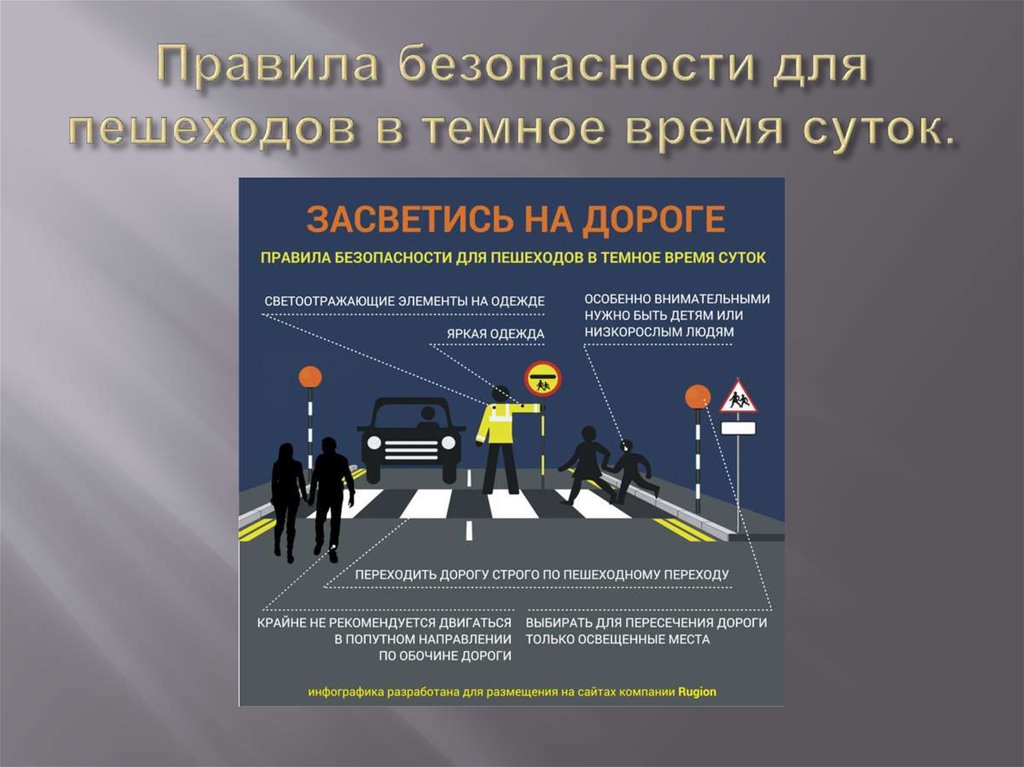 Раздел VI-B). На рис. 2 представлена схема модели.
Раздел VI-B). На рис. 2 представлена схема модели.
Поведение пешеходов во многом определяется их выбором, который может быть сделан на высоком уровне, т.е. выбор пункта назначения, режимы транзита, выбор маршрута или низкий уровень, например. выбор скорости, следующего шага или действия [4] . Наша модель предполагает, что пункт назначения и способ передвижения выбираются случайным образом, тогда как другие варианты выбора зависят от индивидуальных характеристик пешеходов и контекста.
III-1 Выбор транзита
Для пешеходов доступны четыре вида транспорта: пешком, на машине, автобусе и такси. В режиме ходьбы пешеход движется к месту назначения исключительно пешком, тогда как в режиме движения он перемещается к месту припаркованного автомобиля и едет к месту назначения. При использовании общественного транспорта, в том числе автобуса и такси, пешеход направляется в специально отведенную зону ожидания, т.е. автобусной остановке и садятся в транспорт, чтобы добраться до ближайшей к месту назначения точки. Основное внимание в этой работе уделяется поведению при ходьбе, которое может включать переход.
Основное внимание в этой работе уделяется поведению при ходьбе, которое может включать переход.
III-2 Выбор маршрута
Выбор маршрута мотивируется характеристиками пешехода (например, соблюдение законов, черта характера), расстоянием до ближайшего пешеходного перехода, транспортным потоком и местом назначения (см. Раздел IV).
III-3 Выбор деятельности
В любой момент во время ожидания или ходьбы пешеходы могут участвовать в какой-либо деятельности, т.е. курить или фотографировать на произвольную продолжительность. Выполнение таких действий не влияет на решение пешеходов перейти дорогу.
III-4 Выбор скорости
Средняя скорость пешеходов определяется их типом и характеристикой (как описано в Разделе IV), например,
. чем агрессивнее пешеход, тем быстрее он будет идти/переходить дорогу. Для каждого пешехода скорость ходьбы случайным образом выбирается из асимметричного нормального распределения,
| педс∼2×N(μps,σ2ps)×Φ(αμps,σ2ps) |
где μps и σps
— среднее значение и стандартное отклонение скорости для данного типа пешехода,
α — коэффициент асимметрии, а Φ — CDF нормального распределения. Коэффициент перекоса устанавливается равным среднему значению с отрицательным или положительным знаком для консервативных и агрессивных пешеходов соответственно и нулевым для средних пешеходов. Скорость пешеходов также может временно увеличиться при переходе в зависимости от того, как долго они ждут у бордюра (см. раздел V-A).
Коэффициент перекоса устанавливается равным среднему значению с отрицательным или положительным знаком для консервативных и агрессивных пешеходов соответственно и нулевым для средних пешеходов. Скорость пешеходов также может временно увеличиться при переходе в зависимости от того, как долго они ждут у бордюра (см. раздел V-A).
III-5 Выбор следующего шага
определяется динамически в зависимости от выбора маршрута и динамики сцены, особенно когда пешеход собирается перейти дорогу (см. Раздел V-A).
IV Пешеходные характеристики
Личные характеристики (например, скорость ходьбы, оценка дороги, допустимый интервал) влияют на поведение пешеходов при переходе [18] . В нашей модели мы рассматриваем шесть основных характеристик, а именно: тип пешехода, черта характера, соблюдение закона, принятие промежутков, схема пересечения и воспринимаемый шум.
Ив-1 Тип
Пешеходный тип пешехода фиксирует возрастную группу и подвижность пешеходов. В нашей модели есть три типа пешеходов: взрослый, ребенок и пожилой. Разные типы пешеходов имеют разную скорость ходьбы, влияющую на их принятие и пересечение промежутка.
В нашей модели есть три типа пешеходов: взрослый, ребенок и пожилой. Разные типы пешеходов имеют разную скорость ходьбы, влияющую на их принятие и пересечение промежутка.
Ив-2 Черта
Каждый пешеход может иметь одну из трех предопределенных характеристик pedtrait: агрессивный, консервативный и средний. Характер пешехода влияет на скорость его ходьбы и принятие им промежутка и, следовательно, на принятие им решения о переходе. Например, агрессивные пешеходы идут быстрее и допускают более короткие промежутки для перехода, поэтому пересекают дорогу раньше, чем консервативные.
IV-3 Закон послушания
Пешеходное соблюдение закона определяет выбор маршрута. Законопослушные пешеходы всегда переходят дорогу по обозначенным пешеходным переходам и подчиняются сигналам светофора, тогда как правонарушители всегда переходят дорогу в неположенном месте. Средний человек может быть послушным закону или нарушать его в зависимости от контекста. В нашей модели средний человек является послушным, если его расстояние до ближайшего обозначенного пешеходного перехода distc меньше заданного порога thdistc.
IV-4 Gap приемка
Пешеходы принимают разные временные промежутки для перехода. Это актуально для пешеходов, когда они собираются перейти дорогу в неположенном месте. Как и в случае со скоростью ходьбы, начальный допустимый разрыв пешеходного промежутка выбирается из асимметричного распределения со средним значением и стандартным отклонением определенного диапазона промежутка, а коэффициент перекоса устанавливается равным положительному или отрицательному среднему зазору для консервативных и агрессивных признаков соответственно.
Ив-5 Схема пересечения
Эта характеристика представляет предпочтение пешехода при переходе через одну из двух категорий: одноступенчатая, когда пешеход ждет, пока все полосы не будут свободны для перехода, и скользящий зазор, если пешеход начинает переходить дорогу, как только зазор на ближайшей полосе становится пустым. доступно [5] (см. рис. 3). У пешеходов также есть параметр, определяющий, ждут ли они остановившихся транспортных средств, которые преграждают им путь, или обходят их, чтобы перейти дорогу.
IV-6 Перцепционный шум
Пешеходы различаются по своей способности оценивать свое окружение, то есть насколько точно они могут оценивать расстояние и скорость других агентов в окружающей среде. Мы выбираем частоту ошибок восприятия из нормального распределения, pedp-шум ~ N (0,1). Этот фактор, в конечном счете, влияет на расстояние, которое пешеходы соглашаются перейти через дорогу (см. Раздел V-B6).
Рис. 3: Иллюстрация различных схем пересечения. Будущие местоположения транспортных средств показаны прозрачными контурами транспортных средств. Пешеход, выполняющий одноэтапный переход (зеленая стрелка), не может продолжить движение, поскольку транспортное средство в дальней полосе пересекает его путь. Пешеход со стратегией перекатывания (синяя стрелка) начинает переход, поскольку транспортное средство на ближайшей полосе находится достаточно далеко.
V Поведение пешеходов при ходьбе
Поведение при ходьбе лежит в основе предлагаемой модели. Если выбранный маршрут не предполагает пересечения, пешеход просто следует по кратчайшему пути к месту назначения. В противном случае им может потребоваться пересечь дорогу один или несколько раз в зависимости от схемы дороги и местоположения конечного пункта назначения. Ниже мы подробно рассмотрим процесс принятия решений при различных видах пересечения.
В противном случае им может потребоваться пересечь дорогу один или несколько раз в зависимости от схемы дороги и местоположения конечного пункта назначения. Ниже мы подробно рассмотрим процесс принятия решений при различных видах пересечения.
V-a Переход по обозначенным пешеходным переходам
Возможны два варианта: а) переход только по обозначенным пешеходным переходам и б) переход по любым обозначенным пешеходным переходам. Если установлен первый вариант, законопослушные пешеходы отдают предпочтение сигнальным переходам, и только в том случае, если на маршруте их нет, они будут переходить на любом обозначенном пешеходном переходе. В любом случае пешеходы выбирают пешеходные переходы, расположенные ближе всего к их конечному пункту назначения. После выбора пешеходного перехода рассчитывается кратчайший путь от текущего местоположения пешехода до пешеходного перехода. Далее пешеход движется к пешеходному переходу и переходит улицу по сигналу светофора или в случае уступки транспортных средств на нерегулируемом пешеходном переходе.
VB Jaywalking
Пешеход, переходящий улицу, начинает с выбора точки перехода. В нашей модели пешеход сначала случайным образом выбирает точку пересечения ptc рядом с пунктом назначения. Затем вычисляется кратчайший путь до точки пересечения.
V-B1 Намерен пересечь
Когда пешеход подходит к переходу, его статус меняется на «Собираюсь перейти». Затем пешеход подходит к обочине и ждет, чтобы перейти.
V-B2 Подождите
Во время этой фазы пешеход оценивает движение и ждет подходящего промежутка для перехода pedc-gap. В зависимости от схемы перехода пешеход будет либо ждать, пока все полосы впереди будут иметь достаточный зазор (одноступенчатый), либо только ближайшая полоса (скользящий зазор) (см. рис. 3).
Во время фазы ожидания pedc-gap динамически обновляется в зависимости от времени ожидания пешехода pedwt перед переходом,
| pedc-gap=max(gapmin,fwt(pedgap,pedwt)) |
, где gapmin — минимальное допустимое пороговое значение промежутка, а fwt — функция принятия пешеходом промежутка и времени ожидания. Здесь начальный интервал приема пешехода линейно уменьшается на постоянную величину wtconst за каждую секунду ожидания пешехода.
Здесь начальный интервал приема пешехода линейно уменьшается на постоянную величину wtconst за каждую секунду ожидания пешехода.
Рис. 4: Иллюстрация значимости транспортного средства для расчета TTC. Красные транспортные средства актуальны, а серые не имеют значения для пешехода, переходящего дорогу. veh2 оставил сигнал поворота, показывая намерение повернуть налево, поэтому он не имеет значения, в отличие от транспортного средства позади него, которое намеревается двигаться прямо. В случае veh3, поскольку транспортное средство подает сигнал и поворачивает на путь пешехода, имеет значение.
V-B3 Расчет времени до столкновения (TTC)
Рис. 5: Сравнение различных методов расчета TTC для заданного сценария. Автомобиль находится на расстоянии 15 м от пешехода, движущегося со скоростью 4 м/с и ускоряющегося со скоростью 1 м/с2.
Чтобы рассчитать интервал пересечения, сначала следует рассчитать минимальное значение TTC приближающихся транспортных средств. Если pedc-gap Расчет TTC включает следующие шаги:
Расчет TTC включает следующие шаги:
Идентификация соответствующих транспортных средств. Первым шагом является выявление соответствующих транспортных средств, то есть тех, которые представляют потенциальную угрозу для пешехода. Интуитивно это транспортные средства на маршрутах, которые потенциально пересекаются с путем пешехода (позиционная релевантность), и те, которые намерены двигаться по пересекающимся маршрутам с пешеходами (преднамеренная релевантность). Для улицы с двусторонним движением позиционно релевантные транспортные средства Vehrel выражаются как 9.0005
| Верель=∀vehi|−π<θp,θvi<π∧ | ||
| знак(θp)≠знак(θvi),i∈1,2,…,n | ||
| θp=∡pvi−ϕped | ||
| θvi=∡vip−ϕvehi |
, где ϕped и ϕvehi — ориентация пешехода и транспортного средства соответственно. ∡pvi и ∡vip представляют собой углы между пешеходом и транспортным средством и наоборот, равные
∡rt=arctan(tx-rx,ty-ry)×180/π. |
После определения релевантности транспортных средств их сигнальный статус учитывается для дальнейшего уточнения списка соответствующих транспортных средств в соответствии с их преднамеренной релевантностью. Например, если транспортное средство движется к пешеходу с другой стороны перекрестка, это имеет значение только в том случае, если оно движется прямо. Однако, если на транспортном средстве включен сигнал поворота, он больше не актуален (см. рис. 4).
Расчет TTC для соответствующих транспортных средств. Обычный подход к вычислению TTC заключается в делении расстояния между передней частью приближающегося транспортного средства и пешеходом на текущую скорость транспортного средства (постоянную) [8, 24, 20] . В качестве альтернативы для учета изменений скорости можно использовать среднее значение текущей скорости и ограничение максимальной скорости на дороге (среднее). Однако эти подходы дают лишь приблизительную оценку. Во-первых, они не учитывают точное ускорение автомобиля, т.е. если автомобиль начинает движение с места или замедляется. Во-вторых, недостаточно учитывать расстояние только до передней части транспортного средства, поскольку пешеход может удариться и о борт транспортного средства, особенно более длинного, такого как автобус или грузовик.
Во-первых, они не учитывают точное ускорение автомобиля, т.е. если автомобиль начинает движение с места или замедляется. Во-вторых, недостаточно учитывать расстояние только до передней части транспортного средства, поскольку пешеход может удариться и о борт транспортного средства, особенно более длинного, такого как автобус или грузовик.
По вышеуказанным причинам мы определяем динамическую модель TTC (см. рис. 5 для сравнения). Начнем с измерения времени, которое требуется транспортному средству для достижения максимальной скорости,
| tmaxs=(maxs-vehs)/vehaccl |
, где vehaccl и vehs — ускорение транспортного средства и его текущая скорость. максимальное значение задается
| макс. = мин. (дорожные макс., макс. транспортные средства) |
, где roadmaxs — заданное ограничение скорости на дороге, а vehmaxs — максимальная скорость транспортного средства. Как указано здесь, мы предполагаем, что транспортные средства не превышают ограничение скорости.
Как указано здесь, мы предполагаем, что транспортные средства не превышают ограничение скорости.
Затем мы вычисляем время, необходимое транспортному средству, чтобы добраться до пешехода, как
| tv→p=(−vehs+√veh3s−2×vehaccl×vehdist)/vehaccl |
vehdist — это расстояние от транспортного средства до точки пересечения его пути и пути пешехода. Если tvmaxs>tv→p, то tv→p считается TTC данного автомобиля. В противном случае
| ТТС=tmaxs+tconsts |
| tconsts=(vehdist-distmaxs)/maxs |
, где distmaxs — расстояние, на котором транспортное средство достигает максимальной скорости, заданной формулой,
| distmaxs=0,5×(автомобили+макс)×tmaxs. |
Регулировка ТТС. TTC каждого соответствующего транспортного средства рассчитывается для каждой полосы на основе расстояния между передней частью транспортного средства и прогнозируемым местоположением пешехода на данной полосе. TTCveh>=0, то транспортное средство не обгоняет пешехода к моменту его прибытия на заданную полосу. Такие автомобили остаются актуальными. 9ТТСвэх=0.
TTCveh>=0, то транспортное средство не обгоняет пешехода к моменту его прибытия на заданную полосу. Такие автомобили остаются актуальными. 9ТТСвэх=0.
Обратите внимание, что в случае транспортных средств, которые останавливаются и блокируют пешеходный путь, их значения TTC исключаются, если схема пешеходного перехода заставляет их двигаться вокруг остановившихся транспортных средств.
V-B4 Ожидание перехода слишком долго
Если пешеход слишком долго ждет перед переходом, т. е. fwt(pedgap,pedwt)
В зависимости от схемы перехода пешеходы будут ждать освобождения всех полос (одноэтапный переход) или только ближайшей к ним полосы (скользящий разрыв). В обоих случаях пешеходы пересчитывают минимальную ТТС после каждого шага на другую сторону улицы. Если движение вперед безопасно, они делают это на следующем шаге, в противном случае они перемещаются к краю ближайшей безопасной полосы (следующей или предыдущей) и ждут разрыва. Ожидание посреди дороги может произойти даже в том случае, если пешеход совершает одноэтапный переход из-за динамического характера движения и зашумленных оценок ВТС. Обратите внимание, что ни принятие пешеходом промежутка, ни поведение при переходе не меняются на этом этапе (как это было на начальном этапе ожидания, см. раздел V-A). Поэтому используются pedc-gap и окончательная скорость ходьбы, определенная на этапе ожидания.
V-B6 Шум при вычислении TTC
В действительности у пешеходов нет идеальных оценок скорости автомобиля и расстояния. Поэтому их восприятие транспортных средств зашумлено, что часто приводит к недооценке времени до столкновения. Чтобы учесть перцепционный шум при расчете TTC, мы следуем модели, предложенной в [6] .
Поэтому их восприятие транспортных средств зашумлено, что часто приводит к недооценке времени до столкновения. Чтобы учесть перцепционный шум при расчете TTC, мы следуем модели, предложенной в [6] .
Для расчета TTC мы вычисляем среднее значение и стандартное отклонение воспринимаемых (или оцениваемых) значений TTC следующим образом:
| pTTCμ=0,7+0,56×TTC |
| pTTCσ=0,17×TTC+0,49. |
Затем, используя метод репараметризации, мы вычисляем воспринимаемые значения TTC для данного пешехода,
| pedpTTC=pTTCμ+pedp-шум×pTTCσ. |
Для более реалистичного моделирования в случаях, когда транспортное средство находится в непосредственной близости от пешехода, мы рассматриваем шумовой порог отсечки TTCnoise-th, ниже которого шумовое воздействие сводится к нулю.
Ви Оценка
Через реализацию
Рис. 6: Пример среды моделирования с различными агентами. Пешеходов можно увидеть по их идентификаторам.
Для оценки мы использовали платформу моделирования дорожного движения с открытым исходным кодом SUMO (v1.9.0) [13] . Некоторые из элементов управления обрабатывались поведением SUMO по умолчанию, включая изменение фаз светофора, движение транспортных средств, взаимодействие между пешеходами и движения пешеходов, за исключением действия перехода улицы, которое контролировалось вручную предложенной моделью.
Настройка дороги. В дорожной сети расстояние между всеми узлами было установлено равным 30 м. В каждом направлении дороги две полосы шириной 3,5 метра каждая. По обеим сторонам улицы есть тротуары шириной 3 м, а ограничение скорости на улице установлено на уровне 50 км/ч (или 13,89 м/с), что типично для городских районов.
По умолчанию перекресток с 4 путями состоит из 2 сегментов дороги, пересекающихся под прямым углом. Горизонтальный отрезок имеет 9 узлов, а вертикальный — 7 узлов. Установлено 5 сигнальных пешеходных переходов: по одному в центре перекрестка и по одному на каждой примыкающей дороге.
Горизонтальный отрезок имеет 9 узлов, а вертикальный — 7 узлов. Установлено 5 сигнальных пешеходных переходов: по одному в центре перекрестка и по одному на каждой примыкающей дороге.
Агенты. Мы реализовали три типа пешеходов: взрослые (A), дети (C) и пожилые люди (E), которые имеют разную скорость ходьбы и размеры (дети меньше двух других). Для транспортных средств мы использовали следующие типы транспортных средств по умолчанию из SUMO: легковой (P), велосипед (Bi), грузовик (T), автобус (Bu) и мотоцикл (M).
Маршрутизация. Все маршруты были рассчитаны в рамках нашей модели. Для пешеходов точки отправления и назначения выбирались случайным образом из доступных ребер сети, а кратчайший путь между ними рассчитывался в зависимости от статуса соблюдения пешеходами закона. В случае транспортных средств точки отправления и назначения выбирались из конечных точек сети, а полосы отправления рандомизировались при создании нового транспортного средства. Примерный вид среды моделирования с различными типами пешеходов и транспортных средств и доступными элементами инфраструктуры (автобусные остановки, пешеходные переходы, светофоры) показан на рис. 6.9.0005
6.9.0005
Калибровка модели Vi-B
Параметры симуляции и модели по умолчанию, использованные в наших экспериментах, перечислены в таблице I. Чтобы создать более реалистичные сценарии, мы установили типы транспортных средств и пешеходов в соответствии со статистикой, извлеченной из набора данных о естественном вождении PIE [17] . Средние скорости ходьбы пешеходов для различных типов пешеходов установлены на основе полевого исследования, проведенного Knoblauch et al. [12] . Поскольку приемлемость пешеходных промежутков может сильно различаться в зависимости от страны и окружающей среды [18] , мы установили допустимый диапазон гэпа по умолчанию в соответствии с исследованием, проведенным Schmidt et al. [19] в Европе, что согласуется с более ранним европейским исследованием Ashworth [1] и североамериканским исследованием Brewer et al. [5] .
Внутренние параметры пешеходов, такие как черта характера, законопослушание и пороговое значение расстояния до пешеходного перехода, было трудно оценить на основе доступных натуралистических данных. Поэтому остальные параметры были установлены эмпирически для достижения сбалансированного набора скрещивающихся моделей поведения.
Поэтому остальные параметры были установлены эмпирически для достижения сбалансированного набора скрещивающихся моделей поведения.
| Параметры | Значение(я) | Описание | ||
| Моделирование | ||||
| педрейт % | Con(40), Agg(40),Avg(2) | % признаков пед | ||
| педло % | LV(40), LO(40),Avg(20) | % пед законопослушание | ||
| педтип% | А(89), С(1), Е(10) | % типов педов | ||
| мкс м/с | А(1,51), С(1,48), Е(1,25) | средняя скорость ходьбы | ||
| σps м/с | 0,14 | стандартное отклонение скорости ходьбы | ||
| % |
| % типов транспортных средств | ||
| vehmaxs м/с | СУМО по умолчанию | максимальная скорость автомобиля | ||
| Roadmaxs м/с | 13,89 | ограничение скорости на дороге | ||
| Сим шаг с | 0,1 | длина шага моделирования | ||
| Принятие решений | ||||
| разрыв с | [3, 8] | допустимый диапазон зазора | ||
| гэпмин с | 2 | мин принятый зазор | ||
| wtconst с | 1 | постоянная времени ожидания | ||
| расстояние м | [30, 60] |
| ||
| спф | 3 |
| ||
| Пересечение % | 50 | % переход пешеходов | ||
| Метод ТТС | Динамический | метод TTC по умолчанию | ||
| TTCnoise-th s | 0,3 | Порог шумоподавления TTC |
ТАБЛИЦА I: Параметры моделирования и модели принятия решений по умолчанию 90–208
Vi-C Эффекты послушания закону и черты характера
| (а) | (б) | (с) |
Рис. 7: а) % завершенных незаконных переходов для различных параметров соблюдения закона и характеристик (применительно ко всем пешеходам). б) % совершенных незаконных переходов средними пешеходами с различной долей агрессивных пешеходов в различных условиях движения. c) среднее значение TTC во время перехода (левая панель) и средняя скорость ходьбы (правая панель) пешеходов-нарушителей в зависимости от доли агрессивных пешеходов в различных условиях движения.
7: а) % завершенных незаконных переходов для различных параметров соблюдения закона и характеристик (применительно ко всем пешеходам). б) % совершенных незаконных переходов средними пешеходами с различной долей агрессивных пешеходов в различных условиях движения. c) среднее значение TTC во время перехода (левая панель) и средняя скорость ходьбы (правая панель) пешеходов-нарушителей в зависимости от доли агрессивных пешеходов в различных условиях движения.
Мы начнем с оценки влияния характеристик и законопослушания, двух основных характеристик, влияющих на принятие решений пешеходами. Мы запустили симуляцию на 2500 шагов, варьируя черты и законопослушность всех пешеходов с остальными параметрами, установленными по умолчанию. Дорожная сеть была привязана к 4-стороннему перекрестку с сигнальными переходами через каждый второй край. Скорость генерации транспортных средств была установлена на 1 автомобиль каждые 2 секунды для имитации среднего и интенсивного транспортного потока.
График на рис. 6(а) показывает процент завершенных незаконных переходов для каждой комбинации признаков и параметров соблюдения закона. Как и ожидалось, установка обоих значений на случайные приводит к единообразному сочетанию разрешенных и незаконных переходов. Различное соблюдение закона от нарушения до среднего и послушного резко влияет на поведение пешеходов, переходящих дорогу. Среднестатистические пешеходы редко переходят дорогу (4-6% незаконных переходов, полученные в моделировании, соответствуют статистике в наборе данных PIE), в то время как послушные пешеходы никогда этого не делают. Черты в сочетании с послушанием закону создают больше моделей поведения. В результате агрессивные пешеходы находят больше возможностей перейти дорогу в неположенном месте из-за их более высокой скорости ходьбы и более низкого порога приемлемости промежутков.
6(а) показывает процент завершенных незаконных переходов для каждой комбинации признаков и параметров соблюдения закона. Как и ожидалось, установка обоих значений на случайные приводит к единообразному сочетанию разрешенных и незаконных переходов. Различное соблюдение закона от нарушения до среднего и послушного резко влияет на поведение пешеходов, переходящих дорогу. Среднестатистические пешеходы редко переходят дорогу (4-6% незаконных переходов, полученные в моделировании, соответствуют статистике в наборе данных PIE), в то время как послушные пешеходы никогда этого не делают. Черты в сочетании с послушанием закону создают больше моделей поведения. В результате агрессивные пешеходы находят больше возможностей перейти дорогу в неположенном месте из-за их более высокой скорости ходьбы и более низкого порога приемлемости промежутков.
ТАБЛИЦА II: Влияние метода TTC на поведение при скрещивании. Среднее значение и стандартное отклонение (в скобках) для времени ожидания, минимального TTC во время пересечения и количества столкновений транспортных средств с людьми показаны для различных скоростей генерации транспортных средств.
Для детальной демонстрации комбинированного воздействия черт характера и законопослушности на готовность пешеходов идти на риск и поведение при ходьбе мы провели следующий эксперимент. Мы зафиксировали схему дороги (четырехсторонний перекресток), расчет TTC (динамический), а также изменили скорость генерации транспортных средств (1 транспортное средство каждые 8, 6, 5, 4, 3 с), а также процент агрессивных пешеходов от 0% до 100% с шагом 25%. Мы также изменили законопослушность для всех пешеходов на средние и нарушающие. Для каждого условия мы выполнили пять прогонов по 1000 шагов каждый (длительность шага 0,1).
На рис. 6(b) показаны две тенденции. Во-первых, по мере увеличения плотности дорожного движения обычные пешеходы склонны меньше переходить дорогу в неположенном месте. Здесь пешеходы слишком долго ждут подходящего промежутка, и многие из них, как правило, переходят дорогу на ближайшем обозначенном пешеходном переходе (см. Раздел V-B4). Во-вторых, по мере увеличения доли агрессивных пешеходов пешеходы, как правило, идут быстрее и соглашаются на более короткие промежутки, что приводит к большему количеству незаконных переходов. Аналогичные наблюдения можно сделать и для пешеходов-нарушителей: агрессивные пешеходы принимают меньшие промежутки (рис. 6(с) слева) по мере увеличения их средней скорости ходьбы (рис. 6(с) справа).
Аналогичные наблюдения можно сделать и для пешеходов-нарушителей: агрессивные пешеходы принимают меньшие промежутки (рис. 6(с) слева) по мере увеличения их средней скорости ходьбы (рис. 6(с) справа).
Методы расчета Vi-D TTC
Оценка
TTC играет большую роль в решении пешеходов перейти дорогу. Пешеходы, которые переоценивают TTC, подвергаются более высокому риску несчастных случаев, тогда как те, кто недооценивает TTC, могут упустить возможность перейти дорогу. Для количественной оценки влияния различных методов расчета TTC мы провели следующую серию экспериментов. Мы зафиксировали схему дороги на перекрестке с 4 путями, поскольку он является наиболее сложным для расчета TTC (из-за поворота транспортных средств). Мы установили закон подчинения всех пешеходов нарушающим, схему их перехода на одноэтапный переход и смоделировали легкий, средний и плотный транспортный поток, генерируя 1 транспортное средство каждые 6, 4 и 2 секунды соответственно. Остальные параметры были установлены по умолчанию. Для каждой комбинации параметров мы выполнили 5 прогонов по 1000 шагов в каждом и рассчитали разные варианты ТТС, включающие в себя постоянный, средний, динамический, динамический+приспособленный (с поправкой на время в пути пешехода и длину транспортного средства) и динамический+ adj+noise (с корректировкой и перцепционным шумом).
Для каждой комбинации параметров мы выполнили 5 прогонов по 1000 шагов в каждом и рассчитали разные варианты ТТС, включающие в себя постоянный, средний, динамический, динамический+приспособленный (с поправкой на время в пути пешехода и длину транспортного средства) и динамический+ adj+noise (с корректировкой и перцепционным шумом).
В Таблице II показано, как вычисление TTC влияет на принятие решений пешеходами, представленное временем ожидания, оценками минимального TTC во время перехода и, что наиболее важно, количеством столкновений между транспортными средствами и пешеходами.
Постоянный метод постоянно завышает TTC, что приводит к наименьшему среднему времени ожидания, но также и к большему количеству коллизий. Метод усреднения имеет тенденцию к занижению TTC, что увеличивает время ожидания, но все же приводит к значительному количеству коллизий. Динамический метод обеспечивает наиболее точную оценку ВТС, однако пешеходы склонны наталкиваться на борта транспортных средств. Корректировка расчета TTC (Динамический+adj) почти исключает сбои ценой небольшого увеличения времени ожидания по сравнению с Динамическим методом. Небольшое количество аварий остается в основном из-за ограничений модели реактивного поведения транспортного средства. Например, пешеходы, переходящие очень близко к перекрестку, могут заметить транспортные средства, которые собираются повернуть, но транспортные средства видят их только тогда, когда их пути выровнены, и в этот момент уже слишком поздно реагировать. Наконец, добавление перцепционного шума приводит к немного более консервативной оценке TTC, что еще больше увеличивает время ожидания, однако количество аварий остается неизменным.
Корректировка расчета TTC (Динамический+adj) почти исключает сбои ценой небольшого увеличения времени ожидания по сравнению с Динамическим методом. Небольшое количество аварий остается в основном из-за ограничений модели реактивного поведения транспортного средства. Например, пешеходы, переходящие очень близко к перекрестку, могут заметить транспортные средства, которые собираются повернуть, но транспортные средства видят их только тогда, когда их пути выровнены, и в этот момент уже слишком поздно реагировать. Наконец, добавление перцепционного шума приводит к немного более консервативной оценке TTC, что еще больше увеличивает время ожидания, однако количество аварий остается неизменным.
Изменение условий дорожного движения создает больше моделей поведения. Когда трафик интенсивнее, свободных мест становится меньше, что приводит к увеличению времени ожидания. Однако, как отмечено в разделах V-B2 и V-B4, терпимость пешеходов к риску снижается по мере их ожидания. В результате они, как правило, принимают меньшие промежутки, что отражается в уменьшении минимального TTC во время пересечения по мере увеличения плотности транспортного потока. При меньших запасах безопасности неправильное вычисление TTC с большей вероятностью приведет к несчастным случаям. Увеличение потока трафика также создает более сложные взаимодействия между агентами, что отражается в более высоких стандартных отклонениях всех показателей.
При меньших запасах безопасности неправильное вычисление TTC с большей вероятностью приведет к несчастным случаям. Увеличение потока трафика также создает более сложные взаимодействия между агентами, что отражается в более высоких стандартных отклонениях всех показателей.
Схемы пересечения Vi-E
Чтобы проверить влияние схемы пересечения, мы использовали ту же схему дороги и параметры формирования трафика, что и в предыдущем разделе. Все пешеходы были настроены на нарушение и использовали динамический + корректирующий расчет TTC. Для каждого условия движения мы варьировали схемы пересечения всех пешеходов от скользящего промежутка до одноступенчатого и измеряли время ожидания, TTC во время перехода и продолжительность перехода. Результаты показаны на рисунке 8.
Как и ожидалось, время ожидания для стратегии скользящего разрыва значительно короче, чем для одноступенчатого пересечения, поскольку возможности начать пересечение более часты, если учитывается только ближайшая полоса. Кроме того, время ожидания при стратегии скользящего промежутка остается примерно таким же, как и при любых условиях движения, в то время как пешеходы, пересекающие дорогу в одноэтапном режиме, отмечают значительное увеличение как средней, так и стандартной продолжительности ожидания, вызванное меньшим количеством доступных промежутков по мере того, как на улицах появляется больше автомобилей.
Кроме того, время ожидания при стратегии скользящего промежутка остается примерно таким же, как и при любых условиях движения, в то время как пешеходы, пересекающие дорогу в одноэтапном режиме, отмечают значительное увеличение как средней, так и стандартной продолжительности ожидания, вызванное меньшим количеством доступных промежутков по мере того, как на улицах появляется больше автомобилей.
Рис. 8: Влияние схемы перехода на время ожидания пешеходов, TTC во время перехода и продолжительность перехода для легкого, среднего и интенсивного транспортного потока.
Точно так же время, необходимое пешеходам для перехода, значительно больше для одноэтапной стратегии для легкого и среднего трафика из-за того, что пешеходы постоянно оценивают движение. Если первоначальная оценка промежутка изменится (например, из-за сигналов светофора или транспортных средств, меняющих полосу движения или поворачивающих), пешеходы могут застрять посреди дороги в ожидании подходящего промежутка на оставшихся полосах. Прокатный зазор 9Стратегия 0005
Прокатный зазор 9Стратегия 0005
лишена этого недостатка, так как пешеходы одновременно ищут выход только в одной ближайшей полосе. При интенсивном движении продолжительность перехода одинакова для обеих стратегий из-за более высокой вероятности остановки движения, что позволяет пешеходам объезжать заблокированные транспортные средства независимо от стратегии перехода.
Наконец, TTC во время перехода снижается для обеих стратегий перехода по мере увеличения плотности движения в результате меньших промежутков между транспортными средствами и более длительного времени ожидания, что повышает устойчивость пешеходов к риску.
VII Выводы и будущая работа
В этой статье мы представили новую микроскопическую агентную модель для создания реалистичного поведения пешеходов. Предлагаемая модель включает множество факторов, влияющих на поведение при скрещивании. Эти факторы подтверждаются результатами исследований поведения на дорогах и включают индивидуальные характеристики пешеходов, типы выбора, который они делают, и то, как они оценивают окружающую среду (например, актуальность других агентов и воспринимаемый шум). Параметры модели откалиброваны с использованием как естественных данных о вождении, так и результатов из литературы.
Параметры модели откалиброваны с использованием как естественных данных о вождении, так и результатов из литературы.
Обширная экспериментальная оценка показывает, что предложенная модель способна генерировать различные модели поведения пешеходов и показывает влияние изменения ключевых параметров. Эти свойства служат многим областям применения, таким как интеллектуальные системы вождения, транспортное планирование и анализ трафика. Наша модель может быть использована для изучения поведения, возникающего в результате взаимодействия разнородных агентов дорожного движения, и для реконструкции конкретных сценариев с использованием полевых данных.
В будущем мы планируем расширить модель поведения транспортных средств, внедрить динамику группы пешеходов и улучшить модели восприятия для всех агентов.
Ссылки
(PDF) Модель социальной силы для динамики пешеходов (1995) | Dirk Helbing
Journal Article • DOI •
Моделируя динамические особенности Escape Panic
[. ..]
..]
Dirk Helbing 1 , Illés J. Farkas 2 , Tamás vicsek 2 • Институты (
444444. 2
)
28 сентября 2000-Природа
TL;DR: Модель поведения пешеходов используется для исследования механизмов паники и заторов из-за нескоординированного движения в толпе, а также оптимальной стратегии выхода из задымленного помещения. обнаруживается смесь индивидуалистического поведения и коллективного «стадного» инстинкта.
…читать дальшечитать меньше
Аннотация: Одной из самых катастрофических форм коллективного поведения людей является паническое бегство толпы, вызванное паникой, часто приводящее к смертельным случаям, когда людей раздавливают или топчут. Иногда такое поведение возникает в опасных для жизни ситуациях, таких как пожары в многолюдных зданиях; в других случаях давка может возникнуть во время погони за местами или, казалось бы, без причины. Хотя инженеры находят способы уменьшить масштабы таких бедствий, похоже, что их частота увеличивается с увеличением количества и масштабов массовых мероприятий. Но систематические исследования панического поведения и количественные теории, способные предсказать такую динамику толпы, встречаются редко. Здесь мы используем модель поведения пешеходов для исследования механизмов (и предпосылок) паники и заторов из-за нескоординированных движений в толпе. Наши симуляции предлагают практические способы предотвращения опасного давления толпы. Более того, мы находим оптимальную стратегию побега из прокуренного помещения, предполагающую смесь индивидуалистического поведения и коллективного «стадного» инстинкта.
Хотя инженеры находят способы уменьшить масштабы таких бедствий, похоже, что их частота увеличивается с увеличением количества и масштабов массовых мероприятий. Но систематические исследования панического поведения и количественные теории, способные предсказать такую динамику толпы, встречаются редко. Здесь мы используем модель поведения пешеходов для исследования механизмов (и предпосылок) паники и заторов из-за нескоординированных движений в толпе. Наши симуляции предлагают практические способы предотвращения опасного давления толпы. Более того, мы находим оптимальную стратегию побега из прокуренного помещения, предполагающую смесь индивидуалистического поведения и коллективного «стадного» инстинкта.
…read moreread less
3,892 citations
Journal Article•DOI•
Statistical physics of social dynamics
[…]
Claudio Castellano 1 , Santo Fortunato 2 , Vittorio Loreto 1 •Учреждения (
2
)
11 мая 2009 г. – Обзоры современной физики
– Обзоры современной физики
Резюме: Статистическая физика оказалась плодотворной основой для описания явлений, выходящих за рамки традиционной физики. В последние годы физики предприняли попытку изучить коллективные явления, возникающие в результате взаимодействия индивидов как элементарных единиц социальных структур. Рассматривается широкий список тем, начиная от мнений, культурной и языковой динамики и заканчивая поведением толпы, формированием иерархии, человеческой динамикой и социальным распространением. Подчеркиваются связи между этими проблемами и другими, более традиционными темами статистической физики. Особое внимание уделяется сравнению результатов моделирования с эмпирическими данными социальных систем.
…читать дальшеЧитать меньше
3,473 цитирования
Журнальная статья•DOI•
Трафик и связанные с ним автономные многочастичные системы
[…]
Дирк Хелбинг 8 1 910 2 •Учреждения (
2
)
07 декабря 2001 г. -Обзоры современной физики
-Обзоры современной физики
TL;DR: В этой статье рассматриваются эмпирические данные, а затем рассматриваются основные подходы к моделированию движения пешеходов и транспортных средств, в том числе микроскопических (частиц -основные), мезоскопические (газокинетические) и макроскопические (гидродинамические) модели.
…читать дальшечитать меньше
Аннотация: С тех пор как тема динамики дорожного движения привлекла внимание физиков, было обнаружено и объяснено много удивительных эффектов. Некоторые из вопросов, которые теперь понятны, следующие: почему транспортные средства иногда останавливаются в «призрачных пробках», хотя все водители любят быструю езду? Какие механизмы стоят за движением с остановками? Почему существует несколько различных видов заторов и как они связаны? Почему большинство пробок возникает значительно раньше, чем достигается пропускная способность дорог? Может ли временное снижение интенсивности движения стать причиной длительной пробки? При каких условиях ограничение скорости может увеличить скорость движения? Почему пешеходы, движущиеся в противоположных направлениях, обычно организуются в полосы, в то время как аналогичные системы «замораживаются при нагревании»? Ответы на все эти вопросы были получены путем применения и расширения методов статистической физики и нелинейной динамики до самоуправляемых систем многих частиц. В этой статье рассматриваются эмпирические данные, а затем рассматриваются основные подходы к моделированию движения пешеходов и транспортных средств. К ним относятся микроскопические (на основе частиц), мезоскопические (газокинетические) и макроскопические (гидродинамические) модели. Внимание также уделяется формулировке микро-макро-связи, аспектам универсальности и другим объединяющим концепциям, таким как общая структура моделирования самоуправляемых систем многих частиц, включая спиновые системы. Хотя основное внимание уделяется транспортному и пешеходному движению, также затрагиваются приложения к биологическим или социально-экономическим системам, таким как колонии бактерий, стаи птиц, паника и динамика фондового рынка.
В этой статье рассматриваются эмпирические данные, а затем рассматриваются основные подходы к моделированию движения пешеходов и транспортных средств. К ним относятся микроскопические (на основе частиц), мезоскопические (газокинетические) и макроскопические (гидродинамические) модели. Внимание также уделяется формулировке микро-макро-связи, аспектам универсальности и другим объединяющим концепциям, таким как общая структура моделирования самоуправляемых систем многих частиц, включая спиновые системы. Хотя основное внимание уделяется транспортному и пешеходному движению, также затрагиваются приложения к биологическим или социально-экономическим системам, таким как колонии бактерий, стаи птиц, паника и динамика фондового рынка.
…читать дальшеЧитать меньше
2,944 цитирования
Цитаты из «Модели социальной силы для пешехода D…» […]
Александр Алахи 1 , Кратарт Гоэль 1 , Vignesh Ramanathan 1 , Александр Робикке 1
+2 • Еще • Институты (
1
)
1
)0017 27 июня 2016 г. —
—
TL;DR: В этой работе предлагается модель LSTM, которая может изучать основные движения человека и предсказывать их будущие траектории и превосходит современные методы на некоторых из этих наборов данных.
…читать дальшечитать меньше
Аннотация: Пешеходы следуют по разным траекториям, чтобы избежать препятствий и приспособиться к другим пешеходам. Любое автономное транспортное средство, перемещающееся по такой сцене, должно быть в состоянии предвидеть будущие позиции пешеходов и соответствующим образом корректировать свой путь, чтобы избежать столкновений. Эту проблему прогнозирования траектории можно рассматривать как задачу генерации последовательности, где нас интересует прогнозирование будущей траектории людей на основе их прошлых позиций. После недавнего успеха моделей рекуррентной нейронной сети (RNN) для задач прогнозирования последовательности мы предлагаем модель LSTM, которая может изучать общие движения человека и предсказывать их будущие траектории. Это контрастирует с традиционными подходами, в которых используются созданные вручную функции, такие как социальные силы. Мы демонстрируем эффективность нашего метода на нескольких общедоступных наборах данных. Наша модель превосходит современные методы на некоторых из этих наборов данных. Мы также анализируем траектории, предсказанные нашей моделью, чтобы продемонстрировать поведение движения, изученное нашей моделью.
Это контрастирует с традиционными подходами, в которых используются созданные вручную функции, такие как социальные силы. Мы демонстрируем эффективность нашего метода на нескольких общедоступных наборах данных. Наша модель превосходит современные методы на некоторых из этих наборов данных. Мы также анализируем траектории, предсказанные нашей моделью, чтобы продемонстрировать поведение движения, изученное нашей моделью.
…читать дальшечитать меньше
1,691 цитирований
Ссылки на предпосылки или методы из «Модели социальной силы для пешехода D…» функции «притяжения» (традиционные модели социальных сил [24, 43, 73, 50]). Это мотивирует нас построить модель, которая может объяснить поведение других людей в пределах большого района, предсказывая путь человека….
[…]
…Взаимодействия между людьми В новаторской работе Хелбинга и Молнара [24] была представлена модель движения пешехода с силами притяжения и отталкивания, называемая моделью социальной силы. …
…
[…]
…В новаторских работах [24, 50, 35] также предложены способы моделирования взаимодействия между людьми (часто называемого «социальными силами») для повышения надежности и точности в задачах слежения за несколькими целями….
[ …]
Журнальная статья•DOI•
Моделирование динамики пешеходов с использованием двухмерного клеточного автомата
[…]
Carsten Burstedde 1 , Kai Klauck 1 , Andreas Schadschneider 1 , J. Zittartz 1919919959595951950505195051 (
(
15069 (. . • . • . • ( 1 , J. ZITTARTZ 1 1919919191919191919191919191954 1 . 1
)
15 Jun 2001-Physica A-Statistical Mechanics and its Applications
Аннотация: Мы предлагаем двумерную модель клеточного автомата для имитации движения пешеходов. Это модель vmax = 1 со статистикой исключения и параллельной динамикой. Дальние взаимодействия между пешеходами опосредованы так называемым полем пола, которое изменяет скорость перехода к соседним ячейкам. Это поле, которое может быть дискретным или непрерывным, подвержено рассеянию и распаду. движения пешеходов. Поэтому в модели используется идея, аналогичная хемотаксису, но пешеходы следуют по виртуальному, а не по химическому следу. Наша главная цель — показать, что введение такого поля пола достаточно для моделирования коллективного движения. эффекты и самоорганизация, встречающиеся в динамике пешеходов, например, формирование полосы движения встречным потоком через большой коридор. В качестве приложения мы также представляем моделирование эвакуации из большого помещения с ограниченной видимостью, например, из-за отсутствия света или задымления. c 2001 Elsevier Science B.V. Все права защищены
Это модель vmax = 1 со статистикой исключения и параллельной динамикой. Дальние взаимодействия между пешеходами опосредованы так называемым полем пола, которое изменяет скорость перехода к соседним ячейкам. Это поле, которое может быть дискретным или непрерывным, подвержено рассеянию и распаду. движения пешеходов. Поэтому в модели используется идея, аналогичная хемотаксису, но пешеходы следуют по виртуальному, а не по химическому следу. Наша главная цель — показать, что введение такого поля пола достаточно для моделирования коллективного движения. эффекты и самоорганизация, встречающиеся в динамике пешеходов, например, формирование полосы движения встречным потоком через большой коридор. В качестве приложения мы также представляем моделирование эвакуации из большого помещения с ограниченной видимостью, например, из-за отсутствия света или задымления. c 2001 Elsevier Science B.V. Все права защищены
…читать дальшечитать меньше
1462 цитирования
Моделирование поведения пешеходов на железнодорожном транзитном терминале
[1]
Агравал. AW, Шлоссберг. М. и Ирвин. К. (2008). Как далеко, по какому маршруту и почему? Пространственный анализ предпочтений пешеходов. Журнал городского дизайна, Том 13. № 1.
AW, Шлоссберг. М. и Ирвин. К. (2008). Как далеко, по какому маршруту и почему? Пространственный анализ предпочтений пешеходов. Журнал городского дизайна, Том 13. № 1.
DOI: 10.1080/13574800701804074
[2]
Типакорнкиат К., Лиманонд Т. и Ким Х. (2012). Определение и влияние области, влияющей на скорость ходьбы по пешеходной дорожке: тематическое исследование пешеходной дорожки в центральном деловом районе Бангкока, Таиланд. Physica A 391 (2012) 5453-5464.
DOI: 10.1016/j.physa.2012.06.001
[3]
МИСД. (2012). Что такое устойчивое развитие? Получено 29 ноября 2012 г. с http: /www. IISD. орг/сд.
с http: /www. IISD. орг/сд.
[4]
Кампанелла, М.К., Хогендорн, С.П. и Даамен, В. (2011). Методология калибровки моделей пешеходов-ходоков с использованием нескольких целей. Нью-Йорк: Спрингер (стр. 755-759).).
DOI: 10.1007/978-1-4419-9725-8_69
[5]
Текномо, К. (2002). Микроскопические характеристики пешеходного потока: разработка модели сбора и моделирования данных обработки изображений. Высшая школа информационных наук Университета Тохоку, Япония.
[6]
Даамен, В. и Хугендорн, С.П. (2012). Калибровка имитационной модели пешеходов для аварийных дверей для различных типов пешеходов. Технические документы ежегодного собрания TRB (стр. 1-12). Совет по транспортным исследованиям Вашингтона, округ Колумбия.
и Хугендорн, С.П. (2012). Калибровка имитационной модели пешеходов для аварийных дверей для различных типов пешеходов. Технические документы ежегодного собрания TRB (стр. 1-12). Совет по транспортным исследованиям Вашингтона, округ Колумбия.
DOI: 10.3141/2316-08
[7]
Кампанелла, М.К., Хугендорн, С.П. и Дамин, В. (2011). Калибровка моделей пешеходов: изменения параметров в зависимости от режима движения. Европейская конференция по математической и теоретической биологии.
[8]
Хунфэй Дж., Лили Ю. и Мин Т. (2009 г.). Анализ характеристик пешеходного потока и калибровка параметров модели в комплексном транспортном терминале.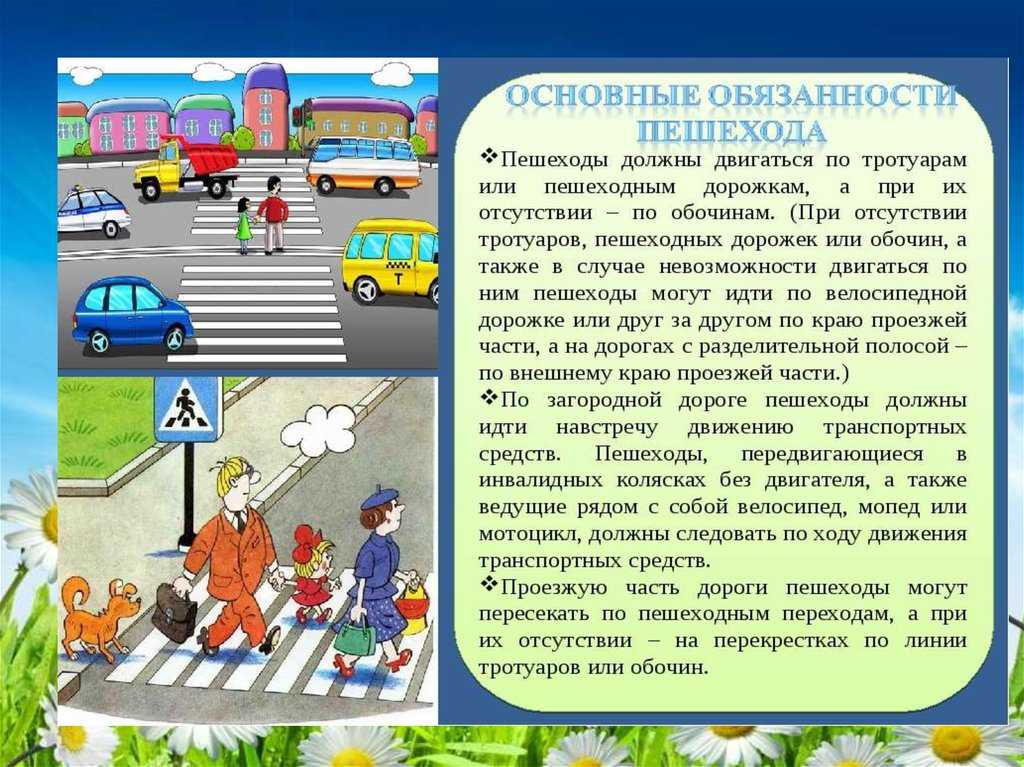 J Transpn Sys Eng & IT, 9(5), 117-123.
J Transpn Sys Eng & IT, 9(5), 117-123.
[9]
пед. (2012). 6-я Международная конференция по динамике пешеходов и эвакуации. Получено 30 ноября 2012 г. с http: /www. пед2012. орг.
[10]
Даамен, В. и Хугендорн, С.П. (2003). Исследование пешеходных потоков в Нидерландах. Procceding Walk 21 IV (стр. 101–117). Портленд, Орегон, США.
[11]
О’Салливан. С. и Моррал. Дж. (1996). Пешком до и от системы легкорельсового транспорта. Журнал транспортных исследований (TRR) 1538.
С. и Моррал. Дж. (1996). Пешком до и от системы легкорельсового транспорта. Журнал транспортных исследований (TRR) 1538.
[12]
Шадшнайдер, А., Клингш, В., Клюпфель, Х., Крец, Т., Рогш, К., и Сейфрид, А. (2008). Динамика эвакуации: эмпирические результаты, моделирование и приложения.
DOI: 10.1007/978-1-4419-7695-6_29
[13]
Оксли Дж., Филдес Б., Ихсен Э., Чарльтон Дж. и Дэй Р. (1997). Различия в оценке дорожного движения между молодыми и пожилыми пешеходами. Анализ и предотвращение несчастных случаев, том 29, № 6, стр. 839–847.
DOI: 10. 1016/s0001-4575(97)00053-5
1016/s0001-4575(97)00053-5
[14]
Сюй, С. и Дух, ХБЛ (2010). Моделирование эффекта связывания и его влияния на динамику пешеходов. Транзакция IEEE по интеллектуальным транспортным системам. Том 11. № 1.
[15]
Окончательный проект генерального плана национального наземного общественного транспорта (2012 г.). Suruhanjaya Pengangkutan Awam Darat (SPAD) Малайзия.
[16]
Ченг Х. и Ян С. (2012). Аварийно-эвакуационная способность станции метро. Социальные и поведенческие науки 43 (2012) 339–348.
DOI: 10.1016/j.sbspro.2012.04.107
[17]
Лей В., Ли А., Гао Р., Хао С. и Дэн Б. (2012). Моделирование эвакуации толпы пешеходов на огромной транзитной конечной станции метро. Физика А 391 (2012) 5355 – 5365.
DOI: 10.1016/j.physa.2012.06.033
[18]
Давидич, М. и Костер, Г. (2012). На пути к автоматической и надежной настройке параметров поведения человека в модели пешеходного потока на измеренные данные. Наука о безопасности. Том 50 (2012). стр. 1253-1260.
DOI: 10.1016/j.ssci.2011.12.024
[19]
Хелбинг, Д. и Молнар, П. (1995). Модель социальной силы для динамики пешеходов. Physical Review E. Том 51, № 5, стр. 4282 – 4286.
DOI: 10.1103/physreve.51.4282
[20]
Бауэр, Д., Сир, С. и Брандл, Н. (2007). Макроскопическое моделирование пешеходных потоков для разработки мер контроля скопления людей в общественном транспорте после особых событий. Летняя конференция по компьютерному моделированию (SCSC). ISBN 1-56555-316-0.
[21]
Ци, З. и Баоминг, Х. (2011). Имитационная модель интерактивного поведения пешеходов. Физика А 390 (2011) 636 – 646.
[22]
Шивакоти, Н., Сарви, М. и Роуз, Г. (2008). Моделирование поведения пешеходов в чрезвычайных ситуациях – современное состояние и направления развития. 31-й Австралазийский форум транспортных исследований. стр. 457-473.
[23]
Зайнуддин, З., Тинакаран, К., и Абу-Сулиман, И.М. (2009). Моделирование обхода Каабы с помощью SimWalk. © EuroJournals Publishing, Inc. 2009, Vol. 38 № 3 (2009), стр. 454-464.
[24]
Сахале, А. С., Бьерлер, М., Фарук, Б., Даналет, А., Хенселер, Ф.С. (2012). Сценарный анализ пешеходного потока в общественных местах. ГТРК (2012).
[25]
Хугендорн, С.П., Даамен, В. и Бови, П.Х.Л. (2003). Извлечение микроскопических характеристик пешеходов из видеоданных. Ежегодное собрание TRB.
[26]
Йоханссон А., Хелбинг Д., Аль-Абидин Х.З. и Аль-Боста С. (2008). От динамики толпы к безопасности толпы. Всемирная научная издательская компания (WPSC).
DOI: 10.1142/s02195251854
[27]
Дэвис, А. С., Инь, Дж.Х. и Веластин, С.А. (1995). Мониторинг толпы с использованием обработки изображений. Журнал IEE Electronic and Communications Engineering. Том 7. № 1. С. 37-47.
[28]
Lam, WHK и Cheung, CY (2000). Взаимосвязь скорости пешеходов и потока для пешеходных зон в Гонконге. Журнал Транспортное машиностроение. 126: 343-349.
DOI: 10.1061/(asce)0733-947x(2000)126:4(343)
Моделирование поведения пешеходов на основе агентов в закрытых помещениях
АНТОНИНИ Г., Бирлер М. и Вебер М. (2006). Модели дискретного выбора поведения пешеходов при ходьбе. Transportation Research Part B 40, 667–687. [doi:10.1016/j.trb.2005.09.006]
БЭТТИ, М. и Цзян, Б. (1999). Мультиагентное моделирование: новые подходы к изучению пространственно-временной динамики в ГИС. Центр расширенного пространственного анализа, серия рабочих документов , документ 10, Университетский колледж Лондона.
БЭТТИ, М. (2001). Агентное моделирование пешеходов. Окружающая среда и планирование B: Планирование и проектирование , 28 (3), 321–326. [дои: 10.1068/b2803ed]
БЭТТИ, М. (2003). Агентное моделирование пешеходов Лонгли и М. Бэтти (ред.) Расширенный пространственный анализ: книга CASA по ГИС . (стр. 81–108). Редлендс, США: ESRI Press
БЕРРУ, Дж. Л., Бичем, Дж., Квалья, П., Кагарлис, М. А. и Геродим, А. (2005). Калибровка и проверка имитационной модели Legion с использованием эмпирических данных. Динамика пешеходов и эвакуации. Springer Berlin, Гейдельберг, 167–181.
СИНИЙ, В.Дж. и Адлер, Дж. Л. (2001). Микромоделирование клеточных автоматов для моделирования двунаправленных пешеходных дорожек. Transportation Research Part B 35, 293–312. [дои: 10.1016/S0191-2615(99)00052-1]
БЕРСТЕДДЕ, К., Клаук, К. , Шадшнайдер, А. и Зиттарц, Дж. (2001). Моделирование динамики пешехода с помощью двумерного клеточного автомата. Physica A 295, 507–525. [дои: 10.1016/S0378-4371(01)00141-8]
БАТЛЕР, С. (1978). Моделирование движения пешеходов в центре Ливерпуля. Рабочий документ 98 , Институт транспортных исследований Университета Лидса.
КАМИЛЛЕН Ф., Капри С., Гарофало К., Игнакколо М., Интурри Г., Плучино А., Раписарда А. и Тудиско С. (2010). Мультиагентное моделирование поведения пешеходов в замкнутой пространственной среде. В публикации о материалах симпозиума TIC-STH по человеческому фактору и эргономике . Каталожный номер IEEE: CFP0956G CDR ISBN: 978-1-4244-3878-5, Библиотека Конгресса: 2009
3.
ЧАКРАБАРТИ, Б.К., Чакраборти, А. и Чаттерджи, А. (2006). Эконофизика и социофизика: тенденции и перспективы . Wiley-ВЧ. [дои: 10.1002/9783527610006]
ДИ ГАНГИ, М. и Велона, П. (2007), Безопасность пользователей при эвакуации по дорогам: модели оттока пешеходов в здании. Городской транспорт XIII, Brebbia CA (ред.), WIT Press.
ГАРОФАЛО, К. (2007 г.). La Carry Capacity — Saggio di Sociologia Matematica e Computazionale . Редактор Симонелли.
ГВИНН С., Гейл Э. Р., Оуэн М., Лоуренс П. Дж. и Филиппидис Л. (1999). Обзор методологий, используемых при компьютерном моделировании эвакуации из застроенной среды . Строительство и окружающая среда, 34, 6, 741–749(9). [дои: 10.1016/S0360-1323(98)00057-2]
ХЕЛЬБИНГ, Д. (1992). Гидродинамическая модель движения пешеходов. Комплексные системы 6, 391–415.
ХЕЛЬБИНГ, Д. и Молнар, П. (1995). Модель социальной силы для пешеходной динамики. Physical Review E, 51, 5, 4282–4286. [doi:10.1103/PhysRevE.51.4282]
ХЕЛБИНГ Д., Фаркас И. Дж. и Вичек Т. (2000). Моделирование динамических особенностей выхода из паники. Природа 407, 487–490. [дои: 10.1038/35035023]
ХЕЛБИНГ Д., Фаркас И. Дж., Молнар П. и Висек Т. (2002). Моделирование пешеходных скоплений в нормальных и эвакуационных ситуациях. Динамика пешеходов и эвакуации, Springer, Berlin , 21–58.
ХЕНДЕРСОН, Л. Ф. (1974). О гидромеханике движения человеческой толпы. Транспортные исследования 8, 509–515. [дои: 10.1016/0041-1647(74)-6]
ИГНАККОЛО, М., Капри, С., Джунта, У. и Интурри, Г. (2006). Модель дискретного выбора для определения политики взимания платы за парковку на острове Ортиджа, Сиракузы. Журнал городского планирования и развития, ASCE. [doi:10.1061/(ASCE)0733-9488(2006)132:3(147)]
ИСФОРТ (2006 г.). 3° Раппорто на городскую мобильность в Италии. http://www.isfort.it.
КИРШНЕР, А., и Шадшнайдер, А. (2002). Моделирование процессов эвакуации с использованием бионической модели клеточного автомата для динамики пешеходов. Physica A 312, 260–276. [дои: 10.1016/S0378-4371(02)00857-9]
КИТАДЗАВА, К. и Бэтти, М. (2004). Моделирование поведения пешеходов: приложение для движения в розничной торговле с использованием генетического алгоритма. В Седьмой международной конференции по системам проектирования и поддержки принятия решений в архитектуре и градостроительстве .
КОН, В.Л., Лин, Л. и Чжоу, С. (2008). Моделирование и симуляция поведения пешеходов. Материалы 22-го семинара по принципам расширенного и распределенного моделирования , IEEE. [DOI: 10.1109 / pads.2008.27]
КУЛИГОВСКИЙ Э.Д., Пикок Р. и Хоскинс Б.Л. (2010). Обзор моделей эвакуации зданий . 2-е издание. Секретарь, 1680 . Доступно по адресу: http://www.nist.gov/manuscript-publication-search.cfm?pub_id=
1.
ЛЕГИОН (2013). http://www.legion.com. По состоянию на 19 апреля 2013 г.
МИТЧЕЛЛ, Д. Х. и МакГрегор Смит Дж., (2001). Топологическое сетевое проектирование пешеходных сетей. Транспортные исследования, часть B 35, 107–135. [дои: 10.1016/S0191-2615(99)00039-9]
ОЭСР, (1998), Безопасность уязвимых участников дорожного движения. Организация экономического сотрудничества и развития ОЭСР, Париж
СТАРЫЙ, С. Дж. (1968). Движение пешеходов по пешеходным дорожкам торговых улиц. Транспортная инженерия и управление, 10, 4, стр. 160–163.
ОСАРАГИ Т. (2004 г.). Моделирование поведения пешеходов и его приложения к пространственной оценке. Материалы третьей международной совместной конференции по автономным агентам и мультиагентным системам .
ПАПАДИМИТРИОУ, Э., Яннис, Г. и Голиас, Дж. (2009). Критическая оценка моделей поведения пешеходов. Transportation Research Part F 12, 242–255, Elsevier. [doi:10.1016/j.trf.2008.12.004]
ПУШКАРЕВ, Б. и Зупан, Дж. М. (1971). Спрос на пешеходное движение. Отчет о дорожном исследовании 355 .
РОНКИ, Э., Колонна, П., Капоте, Дж., Альвеар, Д., Берлоко, Н. и Куэста, А. (2012). Оценка различных моделей эвакуации для анализа безопасности автодорожных туннелей. Туннельные и подземные космические технологии, 30, 74–84. [doi:10.1016/j.tust.2012.02.008]
САРМАДИ, С., Харон, Ф. и Талиб, А.
