

Содержание
Управление электродвигателем
Автор: admin
3
Июн
Решение «все-в-одном» от компании Infineon для разработки беспроводного электроинструмента
Набор включает в себя транзисторы на основе технологии OptiMOS™ с напряжением сток-исток 40/60 В, схему управления EiceDRIVER™ и микроконтроллер XMC1302 на базе ядра Cortex-M0TM.
Получите преимущества от использования инструментального набора для построения схемы управления электродвигателем мощностью 300 Вт посредством быстрого макетирования и тестирования, а также всесторонней технической поддержки. Завершенное системное решение для беспроводных электроинструментов позволяет разработать оптимизированную по размерам и стоимости схему с максимальной плотностью мощности и высокой энергоэффективностью. Системное решение компании Infenion на основе собственных MOSFET-транзисторов, драйверов и микроконтроллера позволит разработчикам снизить до 30% стоимости конечного продукта.
Читать далее »
- Комментарии отключены
- Рубрика: Infineon
Автор: admin
3
Июн
Семейство микроконтроллеров Kinetis KV1x представляют первые приборы в серии устройств Kinetis V, созданных специально для схем управления электродвигателями.
Интеграция самого производительного в отрасли процессора ARM Cortex-M0+, улучшенные АЦП и система тактирования и синхронизации позволяют создавать на основе этих микроконтроллеров мощные конкурентоспособные решения для управления бесколлекторными двигателями постоянного тока (BLDC) и синхронными двигателями с возбуждением от постоянных магнитов (PMSM).
Читать далее »
- Комментарии отключены
- Рубрика: Freescale
Автор: admin
3
Апр
Новые микроконтроллеры обработки смешанных сигналов сертифицированы для автомобильных приложений в соответствии со стандартом AEC-Q100 Grade 0 и поддерживают рабочую температуру окружающей среды от -40°C до +150°C.
Хотите отказаться от коллекторных двигателей постоянного тока в пользу бесколлекторных? Вы хотите максимально использовать пространство печатной платы? Вы используете технологию управления ориентацией магнитного поля для построения эффективных схем управления PMSM двигателем с плавным пуском? Хотите воспользоваться готовым программным обеспечением и ускорить разработку конечного решения? Необходимо большей гибкости подключения к сетям LIN или CAN протоколов? И используете MATLAB при модельно-ориентированном проектировании?
Читать далее »
- Комментарии отключены
- Рубрика: Freescale
Автор: admin
12
Мар
DRV8303 — это интегральная схема драйвера затворов силовых транзисторов для систем управления трехфазными электродвигателями, отличающаяся сверхнизким энергопотреблением, оснащенная двумя токовыми шунтирующими усилителями и поддерживающая широкий диапазон рабочих напряжений.
DRV8303 оснащен тремя полумостовыми драйверами, каждый из которых способен управлять двумя N-канальными MOSFET-транзисторами (одним верхнего плеча и одним нижнего плеча). Устройство подерживает ток стока до 2.3 А, ток истока до 1.7 А и способно работать от однополярного источника питания в широком диапазоне напряжений от 6 В до 60В. Для питания прибор необходим однополярный источник с диапазоном напряжения от 6 В до 60 В. В DRV8303 используется схема управления затворами с компенсационной обратной связью и частичной подзарядкой, что позволяет задействовать 100% рабочий цикл. Помимо этого, для предотвращения сквозного тока через силовые транзисторы полумоста предусмотрен механизм автоматического контроля момента переключения каждого из них.
Читать далее »
- Комментарии отключены
- Рубрика: Texas Instruments
Автор: admin
3
Апр
STK681-300 – это толстопленочная гибридная микросхема реверсивного драйвера коллекторного электродвигателя.
Устройство предназначено для управления коллекторным электродвигателем постоянного тока и обеспечивает четыре режима работы: вперед, назад, торможение и стоп. Допустимый рабочий выходной ток составляет 2.9 А, допустимый пиковый входной ток при торможении двигателя (режим «торможение») составляет 5 А. STK681-300 интегрирует резистор датчика тока электродвигателя, позволяя уменьшить размер готового решения и снизить его стоимость за счет уменьшения количества внешних компонентов. Кроме того, интегрированный датчик тока избавляет разработчика от необходимости рассчитывать мертвое время между моментами закрытия и открытия интегрированных силовых ключей верхнего и нижнего плеча при изменении направления вращения двигателя.
Читать далее »
- Комментарии отключены
- Рубрика: ON Semiconductor
Автор: admin
3
Апр
Микросхема LV8761V компании ON Semiconductor представляет собой полный Н–мостовой драйвер коллекторного электродвигателя постоянного тока, реализующий четыре режима работы: вперед, назад, стоп и режим ожидания.
Малое сопротивление интегрированных силовых ключей в открытом состоянии, нулевой ток покоя в режиме ожидания и высокая энергоэффективность делают данное устройство идеальным для применения в системах управления коллекторными двигателями постоянного тока в офисном оборудовании.
Читать далее »
- Комментарии отключены
- Рубрика: ON Semiconductor
Автор: admin
27
Фев
Микросхема LV8804FV компании ON Semiconductor предназначена для управления бесколлекторными двигателями постоянного тока в вентиляторах персональных компьютеров, серверов и холодильников.
LV8804FV представляет собой бездатчиковый драйвер трехфазного электродвигателя, обеспечивающий малое энергопотребление и низкий уровень вибрации. Отсутствие необходимости применения датчика Холла позволяет уменьшить размер готового решения. Драйвер LV8804FV ориентирован на применение в приложениях, требующих высокой надежности при длительном сроке эксплуатации, таких как вентиляторы серверов и холодильников.
Читать далее »
- Комментарии отключены
- Рубрика: ON Semiconductor
Автор: admin
27
Фев
Гибридные микросхемы семейства STK672 компании ON Semiconductor представляют собой микрошаговые драйверы униполярного двухфазного шагового двигателя, оснащенные интегрированными силовыми ключами на MOSFET транзисторах.
Архитектура устройств базируется на униполярном ШИМ–контроллере со стабилизацией тока нагрузки и включает интегрированный контроллер микрошагов, обеспечивая широкий выбор режимов возбуждения: 2-фазный, 1-2-фазный, W1-2-фазный, 2W1-2-фазный и 4W1-2–фазный. Кроме того, устройства обеспечивают вращение ротора двигателя в прямом и обратном направлении с функцией деления шагов с разрешением до 1:16, позволяя регулировать скорость вращения простым изменением частоты тактового сигнала. Применение микросхем семейства STK672 позволяет разработчикам проектировать решения, обеспечивающие высокий крутящий момент двигателя, низкий уровень вибрации, быстрый отклик и высокий КПД приложения.
Читать далее »
- Комментарии отключены
- Рубрика: ON Semiconductor
Автор: admin
24
Янв
Пиковый ток до 5 А, деление шагов до 1:16
Компания Toshiba Electronics расширила свое семейство микрошаговых контроллеров шаговых двигателей новым устройством — TB6600HG, отличающимся пиковым выходным током до 5 А и возможностью выбора разрешения микрошагов.
Высокая степень интеграции функциональных узлов обеспечивает возможность сокращения количества компонентов при применении TB6600HG в оргтехнике, промышленных системах и других приложениях, требующих точности и повторяемости позиционирования ротора двигателя, а также длительной эксплуатации без технического обслуживания.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
Автор: admin
24
Янв
Идеально подходит для применения в устройствах с питанием от аккумуляторной батареи
DRV8837 представляет собой высокоинтегрированный драйвер маломощного коллекторного электродвигателя, ориентированный на применение в камерах, потребительских товарах, игрушках и других устройствах с низковольтным питанием или с питанием от аккумуляторной батареи, осуществляющих управление механическим перемещением исполнительных элементов.
Драйвер оснащен одним H-мостовым выходным каскадом и предназначен для управления одним коллекторным электродвигателем постоянного тока или одной обмоткой шагового двигателя, а также другими устройствами, такими как соленоиды. Выходные каскады драйвера управления обмоткой двигателя построены на N-канальных силовых MOSFET транзисторах, сконфигурированных как полный Н–мост. Интегрированная схема подкачки заряда (charge pump) обеспечивает необходимое напряжение для управления затворами MOSFET транзисторов.
Читать далее »
- Комментарии отключены
- Рубрика: Texas Instruments
Типовые схемы управления приводами с двигателями постоянного тока
Типовые схемы управления приводами с двигателями постоянного тока
Схема управления двигателем постоянного тока с параллельным, возбуждением (рис. 74). Якорь двигателя включается контактами контакторов 1В и 2В или 1Н и 2Н. Последовательно с якорем включаются пусковые сопротивления, являющиеся в данной схеме одновременно регулировочными. Каждая пусковая ступень может быть зашун тирован а соответствующим контактом контакторов ускорения 1У, 2У и ЗУ. Включение якорной цепи осуществляется контактом линейного контактора Л. Параллельно якорю двигателя посредством з. к. контактора Т подключается сопротивление динамического торможения. Кроме того, параллельно якорю присоединяется катушка реле динамического торможения РДТ. Обмотка возбуждения двигателя ОВ при отключении от сети замыкается на разрядное сопротивле-
Каждая пусковая ступень может быть зашун тирован а соответствующим контактом контакторов ускорения 1У, 2У и ЗУ. Включение якорной цепи осуществляется контактом линейного контактора Л. Параллельно якорю двигателя посредством з. к. контактора Т подключается сопротивление динамического торможения. Кроме того, параллельно якорю присоединяется катушка реле динамического торможения РДТ. Обмотка возбуждения двигателя ОВ при отключении от сети замыкается на разрядное сопротивле-
Пуск двигателя «Вперед» осуществляется путем включения контактов командоконтроллера К1, К2, К4, К5 и Кб. При этом включаются линейный контактор Л, контакторы 1В, 2В и двигатель подключается в сеть
через пусковое сопротивление. После срабатывания контактора Л катушка реле ускорения 1РУ теряет питание. Одновременно через замыкающий бло-7 кировочный контакт 1В подается питание на К4, К5 и Кб. Контактор ускорения 1У срабатывает через интервал, определяемый выдержкой времени реле 1РУ. После срабатывания контактора 1У накоротко замыкается, катушка реле ускорения 2РУ, которая находилась под напряжением, равным падению напряжения на первой ступени пускового со-контактах К5 и Кб времени замыкаются лучает питание..jpg.8f75c0cfa3457d94ec52def014ff505d.jpg) Контактор Т, сработав, замыкает якорь двигателя на сопротивление и двигатель переходит в режим динамического торможения, которое заканчивается при 10—20% номинальной скорости двигателя.
Контактор Т, сработав, замыкает якорь двигателя на сопротивление и двигатель переходит в режим динамического торможения, которое заканчивается при 10—20% номинальной скорости двигателя.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 74. Схема управления двигателем постоянного тока парал-лельного возбуждения
При замкнутых последовательно с выдержкой контакты 2РУ и ЗРУ, которые соответственно включают катушки контакторов ускорения 2У и ЗУ; эти контакторы шунтируют своими контактами ступени ускорения. Двигатель будет работать на естественной характеристике. Включение двигателя для работы «Назад» производится поворотом рукоятки командоконтроллера в направлении, противоположном направлению при пуске вперед. Процесс пуска при этом протекает аналогично.
Во время работы двигателя реле РДТ находится под напряжением, замыкающий контакт РДТ в цепи катушки контактора Т закрыт, но в это время один из размыкающих контактов 2Н или 2В открыт. При отключении двигателя от сети контакты 2В или 2Н закрываются и, так как закрыт контакт РДТ, катушка контактора Т по-
При отключении двигателя от сети контакты 2В или 2Н закрываются и, так как закрыт контакт РДТ, катушка контактора Т по-
Защита двигателя осуществляется максимальным реле РМ и реле напряжения РН.
Схема управления двигателем постоянного тока, работающим в системе генератор — двигатель (рис. 75). Рассматриваемая схема обеспечивает работу двигателя для одного направления вращения и позволяет производить торможение в режиме генераторного торможения с отдачей энергии в сеть при остановке привода.
Пуск двигателя начинается с подключения цепи управления к источнику постоянного тока. Вследствие подачи питания к цепи управления реле РОП срабатывает и закрывает свои замыкающие контакты в цепи кнопки «Пуск». Далее включается приводной двигатель АД генератора Г. Для включения рабочего двигателя Д нажимают на кнопку «Пуск». При нажатии на эту кнопку замыкается цепь, в которой находятся реле 1РП, реле РМ, контакт реле РОП и кнопка «Стоп»
Обмотка контактора 2Л включается автоматически (поскольку обмотка реле 1РП замкнет свой контакт в цепи катушки 2Л), в результае чего включается и контакты контактора 2Л. Одновременно под напряжением окажется обмотка реле РУП.
Одновременно под напряжением окажется обмотка реле РУП.
Контактор 2Л подключает обмотку возбуждения генератора ОВГ к источнику постоянного тока. В обмотке ОВГ возникает ток, а на зажимах генератора э. д. с. В Цепи якорей двигателя и генератора будет проходить ток. Двигатель разгоняется до скорости, обусловленной положением движка реостата РВГ, регулирующего величину тока возбуждения генератора.
Реле РУП имеет две обмотки: одну — последовательную, включенную в цепь якоря двигателя, и другую — параллельную, подключенную к источнику постоянного тока. Намагничивающие силы, создаваемые этими обмотками, направлены встречно. Пока ток в цепи якоря не превосходит допустимого значения, якорь реле удерживается за счет действия параллельной обмотки; при этом замыкающие контакты реле замкнуты и в цепи ОВГ включена только часть сопротивления РВГ, заключенная между точками а и б. Если ток якоря превосходит допустимое значение, то н. с. (намагничивающая сила) последовательной обмотки нейтрализует н. с. параллельной обмотки и якорь реле отпадает. Замыкающие контакты реле РУП ра‘змыкаются, в цепь обмотки возбуждения вводится все сопротивление реостата РВГ. В результате этого уменьшается темп нарастания э. д, с. генератора, дальнейшее увеличение тока якоря предотвращается.
с. параллельной обмотки и якорь реле отпадает. Замыкающие контакты реле РУП ра‘змыкаются, в цепь обмотки возбуждения вводится все сопротивление реостата РВГ. В результате этого уменьшается темп нарастания э. д, с. генератора, дальнейшее увеличение тока якоря предотвращается.
Рис. 75. Схема управления двигателем постоянного тока в системе Г—Д
Для остановки двигателя нажимают на кнопку «Стоп». При этом параллельная катушка реле РУП теряет питание. Контакты реле размыкаются, и в обмотку возбуждения генератора вводится все сопротивление РВГ. Поскольку обмотка возбуждения остается включенной (питание катушки контактора 2JJ осуществляется в этом случае через контакты реле 2РП), ток в ней начинает убывать. Электродвижущая сила генератора уменьшается и, когда она окажется меньше э. д. с. двигателя, возникнет режим генераторного торможения с отдачей энергии в сеть. Двигатель начнет останавливаться. При снижении напряжения генератора до определенного значения отпадает якорь реле 2РП. Его замыкающие контакты отключают обмотку контактора 2Л, что приводит к тому, что замыкающие контакты 2Л отключат ОВГ от сети постоянного тока, а размыкающие Замыкаются и подсоединяют эту обмотку к якорю генератора. Вследствие изменения полярности напряжения на обмотке ОВГ ток возбуждения и э. д. с. генератора уменьшаются до нуля и двигатель останавливается.
Его замыкающие контакты отключают обмотку контактора 2Л, что приводит к тому, что замыкающие контакты 2Л отключат ОВГ от сети постоянного тока, а размыкающие Замыкаются и подсоединяют эту обмотку к якорю генератора. Вследствие изменения полярности напряжения на обмотке ОВГ ток возбуждения и э. д. с. генератора уменьшаются до нуля и двигатель останавливается.
Ограничение тока якоря в допустимых пределах при торможении осуществляет реле РУП. При опасных значениях тока это реле срабатывает и своими замыкающими контактами в цепи обмотки возбуждения генератора замыкает накоротко часть сопротивления РВГ.
Разрядное сопротивление Rp предохраняет обмотку возбуждения от перенапряжений в момент ее отключения. Реле максимального тока РМ отключает двигатель при возникновении в цепи яморя токов короткого замыкания.
Pololu — Драйверы щеточных двигателей постоянного тока
Эти приводы двигателей предназначены для использования с щеточными двигателями постоянного тока, такими как наши металлические мотор-редукторы или пластиковые мотор-редукторы. У нас есть много различных плат драйверов двигателей, которые предлагают множество функций в широком диапазоне рабочих напряжений и токов. Эти модули, как правило, представляют собой базовые платы-носители для выбора микросхем драйверов двигателей или дискретных H-мостов на основе полевых МОП-транзисторов. Они предлагают низкоуровневые интерфейсы, такие как ШИМ и цифровые входы высокого/низкого уровня. Для генерации этих сигналов низкого уровня обычно требуется внешний микроконтроллер. Некоторые из наших драйверов двигателей доступны в форм-факторе платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Кроме того, некоторые из них доступны в форм-факторе платы расширения Raspberry Pi для легкой интеграции с совместимыми платами Raspberry Pi (модель B+ или новее). В приведенных ниже таблицах представлено сравнение основных характеристик и спецификаций наших приводов двигателей.
У нас есть много различных плат драйверов двигателей, которые предлагают множество функций в широком диапазоне рабочих напряжений и токов. Эти модули, как правило, представляют собой базовые платы-носители для выбора микросхем драйверов двигателей или дискретных H-мостов на основе полевых МОП-транзисторов. Они предлагают низкоуровневые интерфейсы, такие как ШИМ и цифровые входы высокого/низкого уровня. Для генерации этих сигналов низкого уровня обычно требуется внешний микроконтроллер. Некоторые из наших драйверов двигателей доступны в форм-факторе платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Кроме того, некоторые из них доступны в форм-факторе платы расширения Raspberry Pi для легкой интеграции с совместимыми платами Raspberry Pi (модель B+ или новее). В приведенных ниже таблицах представлено сравнение основных характеристик и спецификаций наших приводов двигателей.
| Драйверы двигателей малой мощности | ||||||
|---|---|---|---|---|---|---|
| ДРВ8838 | БД65496МУВ | ДРВ8835 | ДРВ8833 | А4990 | ТБ6612ФНГ | |
| Каналы двигателя: | одиночный | одиночный | двойной | двойной | двойной | двойной |
Мин. рабочее напряжение: рабочее напряжение: | 0 В | 2 В | 0 В | 2,7 В | 6 В | 4,5 В |
| Макс. рабочее напряжение: | 11 В | 16 В | 11 В | 10,8 В | 32 В | 13,5 В |
| Макс. постоянный ток (1) : | 1,7 А | 1,2 А | 1,2 А | 1,2 А | 0,7 А | 1 А |
| Пиковый ток: | 1,8 А | 5 А | 1,5 А | 2 А | 0,9 А (2) | 3 А |
| Текущая обратная связь? | — | — | — | — | — | — |
| Активное ограничение тока: | — | — | — | регулируемый | регулируемый | — |
| Размер: | 0,4″ × 0,5″ | 0,6″ × 0,6″ | 0,4″ × 0,7″ | 0,5″ × 0,8″ | 0,6″ × 0,8″ | 0,6″ × 0,8″ |
| Доступна версия Shield?: | — | — | Да | — | Да | — |
| Расширение Raspberry Pi версии доступно?: | — | — | Да | — | — | — |
Цена за 1 шт. : : | 4,49 $ | 11,95 $ | 6,95 $ | 9,95 $ | 7,95 $ | 4,95 $ |
| 1 На канал двигателя, на несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. | ||||||
| 2 Ограничение тока по умолчанию; подробности см. в описаниях продуктов. | ||||||
| Приводы двигателей средней мощности | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MP6550 | DRV8876 (QFN) | ДРВ8876 | ДРВ8874 | ДРВ8256Е ДРВ8256П | МАКС14870 | MC33926 | ТБ9051ФТГ | ТБ67Х420ФТГ | ВНХ5019 | |
| Моторные каналы: | одиночный | одиночный | одиночный | одиночный | одиночный | одинарный / двойной | одинарный / двойной | одинарный / двойной | одинарный / двойной | одинарный / двойной |
Мин. рабочее напряжение: рабочее напряжение: | 1,8 В | 4,5 В | 4,5 В | 4,5 В | 4,5 В | 4,5 В | 5 В | 4,5 В | 10 В | 5,5 В |
| Макс. рабочее напряжение: | 22 В | 37 В | 37 В | 37 В | 48 В | 36 В | 28 В | 28 В | 47 В | 24 В |
| Макс. постоянный ток (1) : | 1,7 А | 1,1 А | 1,3 А | 2.1 А | 1,9 А | 1,7 А | 2,5 А | 2,6 А | 3,4 А / 1,7 А | 12 А |
| Пиковый ток: | 2,5 А (2) | 2 А (2) | 2 А (2) | 4,4 А (2) | 6,4 А | 2,5 А | 5 А | 5 А | 9 А / 4,5 А | 30 А |
| Текущая обратная связь? | 200 мВ/А | 2500 мВ/А | 2500 мВ/А | 1100 мВ/А | — | — | 525 мВ/А | 500 мВ/А | — | 140 мВ/А |
| Активное ограничение тока: | регулируемый | регулируемый | регулируемый | регулируемый | регулируемый | регулируемый | — | — | 9 А / 4,5 А | — |
| Размер: | 0,5″ × 0,6″ | 0,6″ × 0,7″ | 0,6″ × 0,7″ | 0,6″ × 0,7″ | 0,6″ × 0,6″ | 0,6″ × 0,5″ | 1,2″ × 1,0″ | 1,0″ × 1,0″ | 1,2″ × 1,0″ | 1,5″ × 1,1″ |
| Доступна версия Shield?: | — | — | — | — | — | Да | Да | Да | — | Да |
| Расширение Raspberry Pi версии доступно?: | — | — | — | — | — | Да | Да | Да | — | — |
Цена за 1 шт. : : | 4,95 $ | 5,95 $ | $6,95 | 9,95 $ | 12,95 долл. США (E) 12,95 долл. США (P) | 14,95 $ | 34,95 $ | 11,95 $ | 14,95 $ | 59,95 $ |
| 1 На канал двигателя, на несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. | ||||||||||
| 2 Ограничение тока по умолчанию; подробности см. в описаниях продуктов. | ||||||||||
| Приводы мощных двигателей | ||||||||
|---|---|---|---|---|---|---|---|---|
| Г2 18в17 | Г2 18в25 | Г2 24в13 | Г2 24в21 | Г2 18в18 | Г2 18в22 | Г2 24в14 | Г2 24в18 | |
| Каналы двигателя: | одинарный | двойной | ||||||
Мин. рабочее напряжение: рабочее напряжение: | 6,5 В | 6,5 В | ||||||
| Макс. рабочее напряжение: | 30 В | 40 В | 30 В | 40 В | ||||
| Макс. постоянный ток (1) : | 17 А | 25 А | 13 А | 21 А | 18 А | 22 А | 14 А | 18 А |
| Текущая обратная связь? | 20 мВ/А | 10 мВ/А | 40 мВ/А | 20 мВ/А | 20 мВ/А | 10 мВ/А | 20 мВ/А | 20 мВ/А |
| Активное ограничение тока: | 40 А регулируемый | 60 А регулируемый | 30 А регулируемый | 50 А регулируемый | 50 А регулируемый | 60 А регулируемый | 40 А регулируемый | 50 А регулируемый |
| Размер: | 1,3″ × 0,8″ | 2,56″ × 2,02″ | ||||||
| Доступна версия Shield?: | — | — | — | — | Да | Да | Да | Да |
| Расширение Raspberry Pi версии доступно?: | — | — | — | — | Да | Да | Да | Да |
Цена за 1 шт. : : | 39,95 $ | 59,95 $ | 39,95 $ | 74,95 $ | 59,95 $ | $99,95 | 59,95 $ | 119,95 $ |
| 1 На канал двигателя, на несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. | ||||||||
Сравните все товары в этой категории
Подкатегории
Товары в категории «Драйверы двигателей постоянного тока с щетками»
Заставьте Arduino двигаться! Этот экран упрощает управление двумя мощными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойные надежные драйверы двигателей VNH5019 работают от 5,5 до 24 В и могут обеспечивать постоянную подачу 12 А (30 А в пиковом режиме) на двигатель или 24 А (60 А в пиковом режиме) на один двигатель, подключенный к обоим каналам. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Эта несущая плата для ИС драйвера двигателя ST VNH5019 работает от 5,5 до 24 В и может обеспечивать непрерывный ток 12 А (пиковое значение 30 А). Он работает с логическими уровнями от 2,5 до 5 В, поддерживает ультразвуковую (до 20 кГц) ШИМ и имеет обратную связь по току (аналоговое напряжение, пропорциональное току двигателя). Наряду со встроенной защитой от обратного напряжения, перенапряжения, пониженного напряжения, перегрева и перегрузки по току эти функции делают этот продукт отличным драйвером двигателя общего назначения.
Эта коммутационная плата упрощает использование драйвера коллекторных двигателей постоянного тока Toshiba TB67h520FTG, который может работать либо в двухканальном режиме для независимого двунаправленного управления двумя двигателями, либо в одноканальном режиме для управления одним двигателем с повышенным током. Он имеет широкий диапазон рабочего напряжения от 10 В до 47 В и может непрерывно подавать 1,7 А на каждый канал двигателя или 3,4 А в одноканальном режиме. Настраиваемый порог прерывания тока позволяет TB67h520 активно ограничивать ток двигателя, а также имеет встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наша несущая плата также добавляет защиту от обратного напряжения (до 40 В).
Он имеет широкий диапазон рабочего напряжения от 10 В до 47 В и может непрерывно подавать 1,7 А на каждый канал двигателя или 3,4 А в одноканальном режиме. Настраиваемый порог прерывания тока позволяет TB67h520 активно ограничивать ток двигателя, а также имеет встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наша несущая плата также добавляет защиту от обратного напряжения (до 40 В).
Этот экран позволяет легко управлять двумя щеточными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойные драйверы двигателей TB9051FTG работают от 4,5 до 28 В и могут обеспечить постоянную подачу 2,6 А на двигатель (5 А в пиковом режиме). Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Фиксированный порог прерывания тока позволяет каждому TB9051 ограничивать пиковый ток двигателя, и они имеют встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наш щит также добавляет защиту от обратного напряжения. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Эта дополнительная плата позволяет Raspberry Pi (модель B+ или новее) управлять парой коллекторных двигателей постоянного тока. Двойные драйверы двигателей TB9051FTG работают от 4,5 В до 28 В и могут обеспечить непрерывную подачу 2,6 А (пиковое значение 5 А) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется как частичный комплект ; все компоненты для поверхностного монтажа установлены, но входящие в комплект разъемы для сквозных отверстий не припаяны.
Эта дополнительная плата позволяет Raspberry Pi B+, Pi A+, Pi 2 или Pi 3 управлять парой коллекторных двигателей постоянного тока. Двойные драйверы двигателей TB9051FTG работают от 4,5 В до 28 В и могут обеспечить непрерывную подачу 2,6 А (пиковое значение 5 А) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется полностью собранной с припаянными разъемами.
Двойные драйверы двигателей TB9051FTG работают от 4,5 В до 28 В и могут обеспечить непрерывную подачу 2,6 А (пиковое значение 5 А) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется полностью собранной с припаянными разъемами.
Эта коммутационная плата упрощает использование Toshiba TB9051FTG Драйвер коллекторного двигателя постоянного тока. Он имеет широкий диапазон рабочего напряжения от 4,5 В до 28 В и может обеспечивать непрерывный ток 2,6 А. Фиксированный порог прерывания тока позволяет TB9051 ограничивать пиковый ток двигателя, а также он имеет встроенную защиту от пониженного напряжения, перенапряжения. текущие и температурные режимы; наша несущая плата также добавляет защиту от обратного напряжения.
Этот экран позволяет легко управлять двумя щеточными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойной MC33926 драйверов двигателей работают от 5 до 28 В и могут обеспечить постоянную подачу 3 А на двигатель. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Его двойной MC33926 драйверов двигателей работают от 5 до 28 В и могут обеспечить постоянную подачу 3 А на двигатель. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Эта дополнительная плата позволяет совместимому Raspberry Pi (модель B+ или новее), включая модели Pi 3 B+ и модель A+, управлять парой коллекторных двигателей постоянного тока. Его двойной MC33926 драйверов двигателей работают от 5 В до 28 В и могут обеспечить постоянную подачу 3 А (5 А пик) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется как частичный комплект ; все компоненты для поверхностного монтажа установлены, но входящие в комплект сквозные разъемы не припаяны.
Эта дополнительная плата позволяет Raspberry Pi B+, A+, Pi 2 или Pi 3 управлять парой коллекторных двигателей постоянного тока. Его двойной MC33926 драйверов двигателей работают от 5 В до 28 В и могут обеспечить постоянную подачу 3 А (5 А пик) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется в полностью собранном виде с впаянными разъемами.
Этот драйвер двигателя постоянного тока с двумя щетками, основанный на полном H-мосте Freescale MC33926, имеет широкий рабочий диапазон от 5 В до 28 В и может непрерывно выдавать почти 3 А (5 пик) к каждому из двух его двигательных каналов. MC33926 работает с логическими уровнями от 3 В до 5 В, поддерживает ультразвуковую ШИМ (до 20 кГц) и имеет обратную связь по току, защиту от пониженного напряжения, защиту от перегрузки по току и защиту от перегрева.
Эта коммутационная плата для полного Н-моста Freescale MC33926 имеет рабочий диапазон от 5 В до 28 В и может непрерывно подавать почти 3 А (пиковое значение 5 А) на двигатель постоянного тока. MC33926 работает с логическими уровнями от 3 В до 5 В, поддерживает ультразвуковую ШИМ (до 20 кГц) и имеет обратную связь по току, защиту от пониженного напряжения, защиту от перегрузки по току и защиту от перегрева.
Эта компактная коммутационная плата для драйвера двигателя DRV8256E компании TI предлагает широкий диапазон рабочего напряжения от 4,5 В до 48 В и может обеспечить постоянную подачу 1,9 А (6,4 А пикового значения в течение <1 секунды) для одного коллекторного двигателя постоянного тока. Он имеет простой двухконтактный интерфейс скорости/направления и встроенную защиту от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Эта компактная коммутационная плата для драйвера двигателя TI DRV8256P обеспечивает широкий диапазон рабочего напряжения от 4,5 В до 48 В и может обеспечить непрерывную работу 1,9A (6,4 А пик в течение <1 секунды) на один коллекторный двигатель постоянного тока.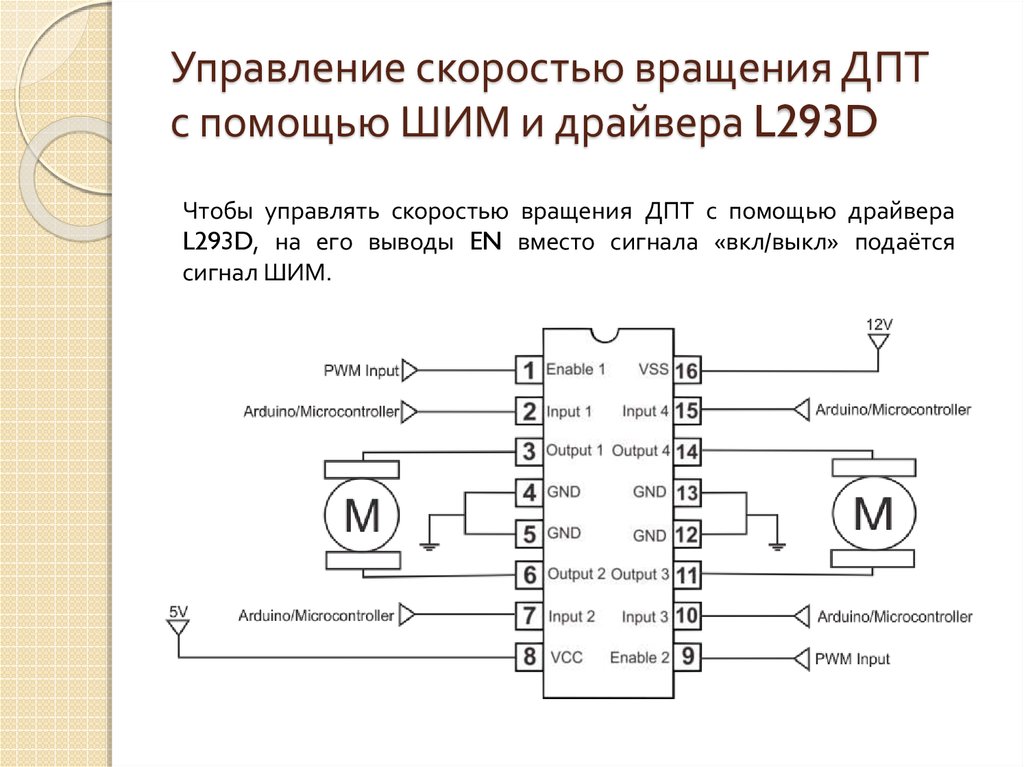 Он оснащен двухконтактным интерфейсом IN/IN для прямого управления выходами двигателя и встроенной защитой от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Он оснащен двухконтактным интерфейсом IN/IN для прямого управления выходами двигателя и встроенной защитой от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Эта компактная коммутационная плата для драйвера двигателя DRV8874 компании TI предлагает широкий диапазон рабочего напряжения от 4,5 В до 37 В и может обеспечить постоянную подачу 2,1 А на один двунаправленный коллекторный двигатель постоянного тока. DRV8874 также имеет встроенный датчик тока и регулирование, что позволяет ограничивать пиковый ток двигателя примерно до 4,4 А по умолчанию, а также встроенную защиту от пониженного напряжения, перегрузки по току и перегрева. Несущая плата добавляет защиту от обратного напряжения.
Эта компактная коммутационная плата для драйвера двигателя DRV8876 компании TI предлагает широкий диапазон рабочего напряжения от 4,5 В до 37 В и может непрерывно подавать 1,3 А на один двунаправленный коллекторный двигатель постоянного тока. DRV8876 также имеет встроенный датчик тока и регулирование, что позволяет ограничивать пиковый ток двигателя примерно до 2 А по умолчанию, а также встроенную защиту от пониженного напряжения, перегрузки по току и перегрева. Несущая плата добавляет защиту от обратного напряжения.
Несущая плата добавляет защиту от обратного напряжения.
Эта компактная коммутационная плата для драйвера двигателя TI DRV8876 обеспечивает широкий диапазон рабочего напряжения от 4,5 В до 37 В и может непрерывно подавать 1,1 А на один двунаправленный коллекторный двигатель постоянного тока. DRV8876 также имеет встроенный датчик тока и регулирование, что позволяет ограничивать пиковый ток двигателя примерно до 2 А по умолчанию, а также встроенную защиту от пониженного напряжения, перегрузки по току и перегрева. Несущая плата добавляет защиту от обратного напряжения.
Эта крошечная коммутационная плата для драйвера двигателя MPS MP6550 обеспечивает широкий диапазон рабочего напряжения от 1,8 В до 22 В и может обеспечить постоянную подачу 1,7 А (пиковое значение 2,5 А) на один коллекторный двигатель постоянного тока. MP6550 имеет встроенные датчики тока и ограничения тока, а также защиту от пониженного напряжения, перегрузки по току и перегрева. Несущая плата также обеспечивает защиту от обратного напряжения до 20 В.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Два встроенных драйвера двигателя MAX14870 позволяют ему работать от 4,5 В до 36 В, что делает его отличным выбором для двигателей и приложений с более высоким напряжением, а экран может выдерживать 1,7 А в непрерывном режиме (2,5 А в пиковом режиме) на двигатель. Экран можно дополнительно настроить для питания Arduino от того же источника питания, что и драйвер двигателя, а сопоставление контактов Arduino можно настроить (путем обрезки дорожек), если значения по умолчанию неудобны.
Эта компактная плата расширения подключается непосредственно к разъему GPIO на Raspberry Pi и представляет собой простое и недорогое решение для управления парой небольших коллекторных двигателей постоянного тока. Пара встроенных драйверов двигателей MAX14870 позволяет ему работать от 4,5 В до 36 В, что делает его отличным вариантом управления небольшими двигателями, работающими в широком диапазоне напряжений. Плата может выдавать непрерывный ток 1,7 А (пиковое значение 2,5 А) на двигатель. Эта версия поставляется как частичный комплект ; все компоненты для поверхностного монтажа установлены, но входящие в комплект разъемы для сквозных отверстий не припаяны.
Плата может выдавать непрерывный ток 1,7 А (пиковое значение 2,5 А) на двигатель. Эта версия поставляется как частичный комплект ; все компоненты для поверхностного монтажа установлены, но входящие в комплект разъемы для сквозных отверстий не припаяны.
Эта компактная плата расширения подключается непосредственно к разъему GPIO на Raspberry Pi и представляет собой простое и недорогое решение для управления парой небольших коллекторных двигателей постоянного тока. Пара встроенных драйверов двигателей MAX14870 позволяет ему работать от 4,5 В до 36 В, что делает его отличным вариантом управления небольшими двигателями, работающими в широком диапазоне напряжений. Плата может выдавать непрерывный ток 1,7 А (пиковое значение 2,5 А) на двигатель. Эта версия поставляется полностью собранной с припаянными разъемами.
Эта компактная коммутационная плата для драйвера двигателя Maxim MAX14870 обеспечивает широкий диапазон рабочего напряжения от 4,5 В до 36 В и может обеспечить непрерывный ток 1,7 А (пиковое значение 2,5 А) для одного коллекторного двигателя постоянного тока. Он имеет простой двухконтактный интерфейс скорости/направления и встроенную защиту от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Он имеет простой двухконтактный интерфейс скорости/направления и встроенную защиту от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Эта крошечная коммутационная плата для двухмоторного драйвера TI DRV8833 может непрерывно подавать 1,2 А на канал (пиковое значение 2 А) на пару двигателей постоянного тока. Благодаря диапазону рабочего напряжения от 2,7 В до 10,8 В и встроенной защите от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева этот драйвер является отличным решением для питания небольших низковольтных двигателей.
Эта крошечная коммутационная плата для двухдвигательного драйвера TI DRV8835 может непрерывно подавать 1,2 А на канал (1,5 А пикового значения) на пару двигателей постоянного тока и поддерживает два возможных интерфейса управления для дополнительной гибкости использования: IN/IN и PHASE/ ДАВАТЬ ВОЗМОЖНОСТЬ. Имея диапазон рабочего напряжения от 0 В до 11 В и встроенную защиту от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева, этот драйвер является отличным решением для питания до двух небольших низковольтных моторы. Несущая плата имеет форм-фактор 14-контактного DIP-корпуса, что упрощает ее использование со стандартными макетными платами без пайки и перфорированными платами размером 0,1 дюйма.
Несущая плата имеет форм-фактор 14-контактного DIP-корпуса, что упрощает ее использование со стандартными макетными платами без пайки и перфорированными платами размером 0,1 дюйма.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его встроенный драйвер двойного двигателя DRV8835 позволяет ему работать в диапазоне от 1,5 В до 11 В, что делает его отличным вариантом управления для низковольтных двигателей. Экран может подавать непрерывный ток 1,2 А (пиковое значение 1,5 А) на двигатель или непрерывный ток 2,4 А (пиковое значение 3 А) на один двигатель, если оба канала подключены параллельно.
Эта компактная плата расширения подключается непосредственно к разъему GPIO на Raspberry Pi B+, Pi A+, Pi 2 или Pi 3 и представляет собой простое и недорогое решение для управления парой небольших коллекторных двигателей постоянного тока. Его встроенный драйвер двойного двигателя DRV8835 позволяет ему работать в диапазоне от 1,5 В до 11 В, что делает его отличным вариантом управления низковольтными двигателями. Плата может подавать непрерывный ток 1,2 А (пиковое значение 1,5 А) на двигатель или 2,4 А (пиковое значение 3 А) на один двигатель, если оба канала подключены параллельно.
Его встроенный драйвер двойного двигателя DRV8835 позволяет ему работать в диапазоне от 1,5 В до 11 В, что делает его отличным вариантом управления низковольтными двигателями. Плата может подавать непрерывный ток 1,2 А (пиковое значение 1,5 А) на двигатель или 2,4 А (пиковое значение 3 А) на один двигатель, если оба канала подключены параллельно.
Эта крошечная плата представляет собой простой способ использования драйвера двух двигателей Toshiba TB6612FNG, который может независимо управлять двумя двунаправленными двигателями постоянного тока или одним биполярным шаговым двигателем. Рекомендуемое напряжение двигателя от 4,5 В до 13,5 В и пиковый выходной ток 3 А на канал (1 А в непрерывном режиме) делают этот драйвер отличным двигателем для маломощных двигателей.
Эта компактная коммутационная плата упрощает использование драйвера двух двигателей Allegro A4990, который может управлять двумя двунаправленными двигателями постоянного тока в широком диапазоне рабочего напряжения от 6 В до 32 В. Он способен непрерывно подавать 0,7 А на каждый канал двигателя. , а встроенные сенсорные резисторы включают A49.90, чтобы ограничить пиковый ток двигателя примерно до 0,9 А на канал. Драйвер также имеет защиту от обратного напряжения, пониженного напряжения, перенапряжения, перегрузки по току и перегрева.
Он способен непрерывно подавать 0,7 А на каждый канал двигателя. , а встроенные сенсорные резисторы включают A49.90, чтобы ограничить пиковый ток двигателя примерно до 0,9 А на канал. Драйвер также имеет защиту от обратного напряжения, пониженного напряжения, перенапряжения, перегрузки по току и перегрева.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его встроенный драйвер двойного двигателя A4990 работает от 6 В до 32 В и может подавать постоянный ток 0,65 А на каждый канал двигателя, что делает его отличным вариантом управления для слаботочных двигателей, работающих от высокого напряжения. А4990 настроен на ограничение пикового тока двигателя примерно до 0,9 А на канал и защищен от обратного напряжения, пониженного напряжения, повышенного напряжения, короткого замыкания и перегрева.
Эта крошечная коммутационная плата для драйвера двигателя DRV8838 от TI может подавать непрерывный ток 1,7 А (пиковое значение 1,8 А) на один коллекторный двигатель постоянного тока. Благодаря диапазону рабочего напряжения от 0 В до 11 В и встроенной защите от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева этот драйвер является отличным решением для питания небольшого низковольтного двигателя. Несущая плата имеет форм-фактор 10-контактного DIP-корпуса, что упрощает ее использование со стандартными макетными платами без пайки и перфорированными платами размером 0,1 дюйма.
Благодаря диапазону рабочего напряжения от 0 В до 11 В и встроенной защите от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева этот драйвер является отличным решением для питания небольшого низковольтного двигателя. Несущая плата имеет форм-фактор 10-контактного DIP-корпуса, что упрощает ее использование со стандартными макетными платами без пайки и перфорированными платами размером 0,1 дюйма.
Эта компактная коммутационная плата для драйвера двигателя ROHM BD65496MUV обеспечивает рабочий диапазон напряжения от 2 В до 16 В и может подавать непрерывный ток 1,2 А (пиковое значение 5 А в течение нескольких миллисекунд) на один коллекторный двигатель постоянного тока. Драйвер двигателя имеет переменную скорость переключения, допускающую частоту ШИМ до 500 кГц, два варианта режима привода и встроенную защиту от пониженного напряжения и перегрева; наш оператор также добавляет защиту от обратного напряжения.
Эта крошечная коммутационная плата для DRV8801 от TI представляет собой современную альтернативу классическим драйверам двигателей, таким как L29. 3D, SN754410 и L298N. Он может непрерывно подавать 1 А (2,8 А пик) на один двигатель и предлагает широкий диапазон рабочего напряжения от 8 В до 36 В. DRV8801 имеет простой двухконтактный интерфейс скорости/направления, обратную связь по току и встроенную — в защите от пониженного напряжения, перегрузки по току и перегрева.
3D, SN754410 и L298N. Он может непрерывно подавать 1 А (2,8 А пик) на один двигатель и предлагает широкий диапазон рабочего напряжения от 8 В до 36 В. DRV8801 имеет простой двухконтактный интерфейс скорости/направления, обратную связь по току и встроенную — в защите от пониженного напряжения, перегрузки по току и перегрева.
Эта ИС драйвера двигателя от ST работает в диапазоне от 5,5 до 24 В и может обеспечить максимальный ток 30 А. Для получения дополнительной информации см. техническое описание VNH5019A-E (1 МБ pdf). Мы используем этот драйвер двигателя в нашем VNH5019.держатель драйвера двигателя и наш двойной экран драйвера двигателя VNH5019 для Arduino.
Pololu — VNH5019 Держатель привода мотора
Обзор
Держатель привода мотора VNH5019, вид снизу с размерами. |
|---|
Этот модуль представляет собой компактную коммутационную плату для высокопроизводительной ИС драйвера двигателя ST VNH5019, полностью интегрированного H-моста, который можно использовать для двунаправленного управления скоростью одного коллекторного двигателя постоянного тока. Основные операции драйвера описаны ниже, но мы также рекомендуем внимательно прочитать VNH5019.техническое описание (1MB pdf) перед использованием этого продукта. Плата включает в себя большинство компонентов типичной схемы приложений на странице 14 технического описания VNH5019, включая подтягивающие и токоограничивающие резисторы, а также полевой транзистор для защиты батареи от переполюсовки. Он поставляется полностью укомплектованным компонентами SMD, включая VNH5019, как показано на изображении продукта.
Основные операции драйвера описаны ниже, но мы также рекомендуем внимательно прочитать VNH5019.техническое описание (1MB pdf) перед использованием этого продукта. Плата включает в себя большинство компонентов типичной схемы приложений на странице 14 технического описания VNH5019, включая подтягивающие и токоограничивающие резисторы, а также полевой транзистор для защиты батареи от переполюсовки. Он поставляется полностью укомплектованным компонентами SMD, включая VNH5019, как показано на изображении продукта.
Характеристики
- Рабочее напряжение: 5,5–24 В 1
- Выходной ток: 12 А, непрерывный (максимум 30)
- 3V-совместимые входы
- Режим ШИМ до 20 кГц, который является ультразвуковым и обеспечивает более тихую работу двигателя
- Выход датчика тока, пропорциональный току двигателя (прибл. 140 мВ/А; активен только при работе H-моста)
- Светодиодные индикаторы двигателя (показывают, что делают выходы, даже если двигатель не подключен)
- Надежный:
- Защита от обратного напряжения до -16 В
- Выдерживает входное напряжение до 41 В
- Отключение при пониженном и повышенном напряжении
- Термическое отключение по стороне высокого и низкого давления
- Защита от короткого замыкания на землю и короткого замыкания на Vcc
1 Хотя защита от перенапряжения обычно срабатывает при напряжении 27 В, она может срабатывать при напряжении до 24 В, поэтому мы не рекомендуем использовать этот драйвер двигателя с батареями на 24 В, которые значительно превышают 24 В при полной зарядке.
Использование драйвера двигателя
Разъемы двигателя и питания двигателя находятся на одной стороне платы, а разъемы управления — на другой стороне. Питание двигателя подключается к большим контактам VIN и GND; оно должно быть между 5,5 и 24 В и иметь возможность обеспечивать потенциально высокие токи, которые потребуются двигателю. Источник питания логики (обычно 2,5–5 В) подключается к небольшим контактным площадкам VDD и GND на стороне управления платы и используется для питания внутренних подтягивающих устройств на линиях включения ENA и ENB. Любое управляющее входное напряжение выше 2,1 В гарантированно будет высоким, поэтому этот драйвер можно напрямую подключать к системам с напряжением 3,3 и 5 В.
На следующей схеме показаны минимальные соединения, необходимые для взаимодействия этого драйвера двигателя с микроконтроллером:
Минимальная схема подключения микроконтроллера к шасси драйвера двигателя VNH5019. |
|---|

В этой конфигурации направление двигателя определяется состоянием выводов INA и INB, а скорость двигателя контролируется рабочим циклом сигнала ШИМ, подаваемого на вывод ШИМ драйвера. Вывод PWM на плате находится в низком положении, поэтому выходы драйвера двигателя по умолчанию фактически отключены; контакты INA и INB являются плавающими (они не подтянуты к какому-либо определенному напряжению по умолчанию). См. таблицы истинности в VNH5019.Техническое описание A-E для получения дополнительной информации о том, как выводы INA, INB и PWM влияют на выходы драйвера, OUTA и OUTB. Обратите внимание, что также возможно сохранить линию ввода-вывода микроконтроллера, напрямую управляя выводами INA и INB, удерживая вывод PWM в высоком уровне (например, подключив его напрямую к VDD), но компромисс заключается в том, что это работает только при низком уровне. частоты (несколько сотен герц или меньше).
Эта плата оснащена светодиодными индикаторами двигателя, которые можно использовать для проверки правильности работы выходов драйвера двигателя перед фактическим подключением двигателя (это может быть особенно полезно при обнаружении проблем, связанных с недостаточным питанием). Яркость светодиода увеличивается с увеличением скорости двигателя, а цвет светодиода меняется в зависимости от направления.
Яркость светодиода увеличивается с увеличением скорости двигателя, а цвет светодиода меняется в зависимости от направления.
Распиновка
| PIN-код | Состояние по умолчанию | Описание |
|---|---|---|
| ВИН | Точка подключения положительной стороны источника питания двигателя 5,5–24 В. Поскольку защита от перенапряжения может достигать 24 В, мы не рекомендуем использовать аккумуляторы на 24 В для VIN. | |
| ВДД | Точка подключения положительной стороны источника питания логики (обычно 2,5–5 В). Единственной функцией этого вывода является питание внутренних подтягивающих устройств на двух линиях включения, ENA и ENB. | |
| ВУТ | Этот контакт дает вам доступ к источнику питания двигателя после защиты от обратного напряжения MOSFET (см. схему платы ниже). Его можно использовать для подачи питания с защитой от переполюсовки на другие компоненты системы, но его не следует использовать для больших токов. Этот вывод следует использовать только как выход. Этот вывод следует использовать только как выход. | |
| Земля | Точки заземления для питания логики и двигателя. Источник управления и драйвер двигателя должны иметь общую землю. | |
| УТА | Выход полумоста А (подключается к одной клемме двигателя постоянного тока). | |
| ВНЕШНИЙ | Выход полумоста B (подключается к другому выводу двигателя постоянного тока). | |
| ШИМ | НИЗКИЙ | Вход широтно-импульсной модуляции: сигнал ШИМ на этом контакте соответствует выходу ШИМ на выходах двигателя. |
| ИНА | ПЛАВАЮЩАЯ | Вход направления вращения двигателя A (ввод по часовой стрелке). |
| ИНБ | ПОПЛАВКА | Вход направления вращения двигателя B (ввод «против часовой стрелки»). |
| КС | Выход датчика тока. Напряжение на выводе составляет примерно 140 мВ на ампер выходного тока, когда вывод CS_DIS имеет низкий уровень или отключен. Показания измерения тока более точны при более высоких токах. Вывод CS предназначен для частот ШИМ 5 кГц и выше. Если вы используете частоту ШИМ ниже 5 кГц и хотите измерить ток, мы рекомендуем добавить дополнительный конденсатор между контактом CS и GND, чтобы сгладить сигнал. Например, если вы используете частоту ШИМ 490 Гц и хотите измерить ток, вам следует добавить конденсатор емкостью 1 мкФ (или больше) между CS и GND. (Обратите внимание, что, хотя напряжение CS потенциально может превышать 3,3 В при высоких токах, схема измерения тока должна быть безопасной для использования со многими аналоговыми входами 3,3 В. Большинство микроконтроллеров имеют встроенные защитные диоды, которые ограничивают входное напряжение до безопасного значения, и поскольку схема CS имеет резистор 10 кОм, включенный последовательно с выходом, через этот диод будет протекать не более нескольких сотен микроампер.) Показания измерения тока более точны при более высоких токах. Вывод CS предназначен для частот ШИМ 5 кГц и выше. Если вы используете частоту ШИМ ниже 5 кГц и хотите измерить ток, мы рекомендуем добавить дополнительный конденсатор между контактом CS и GND, чтобы сгладить сигнал. Например, если вы используете частоту ШИМ 490 Гц и хотите измерить ток, вам следует добавить конденсатор емкостью 1 мкФ (или больше) между CS и GND. (Обратите внимание, что, хотя напряжение CS потенциально может превышать 3,3 В при высоких токах, схема измерения тока должна быть безопасной для использования со многими аналоговыми входами 3,3 В. Большинство микроконтроллеров имеют встроенные защитные диоды, которые ограничивают входное напряжение до безопасного значения, и поскольку схема CS имеет резистор 10 кОм, включенный последовательно с выходом, через этот диод будет протекать не более нескольких сотен микроампер.) | |
| ЭНА/ДИАГА | ВЫСОКИЙ | Комбинация входа включения/вывода диагностики для полумоста A.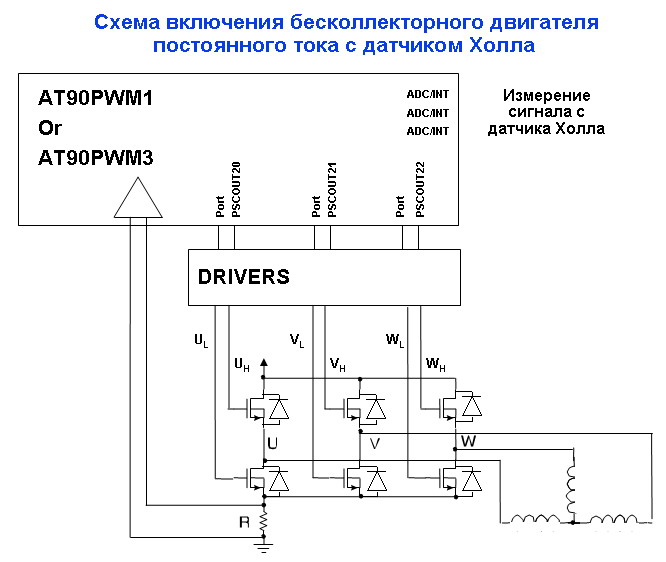 Когда драйвер работает нормально, этот контакт действует как вход разрешения, с логическим высоким уровнем, разрешающим полумост A, и низким логическим уровнем, отключающим полумост A. Когда драйвер возникает ошибка, микросхема переводит этот вывод в низкий уровень, и полумост A отключается. Этот контакт подключен к VDD через подтягивающий резистор на плате. Когда драйвер работает нормально, этот контакт действует как вход разрешения, с логическим высоким уровнем, разрешающим полумост A, и низким логическим уровнем, отключающим полумост A. Когда драйвер возникает ошибка, микросхема переводит этот вывод в низкий уровень, и полумост A отключается. Этот контакт подключен к VDD через подтягивающий резистор на плате. |
| ENB/DIAGB | ВЫСОКИЙ | Комбинация включения входа/вывода диагностики для полумоста B. См. описание ENA/DIAGA. |
| CS_DIS | НИЗКИЙ | Отключает выход датчика тока CS при высоком уровне. Можно оставить отключенным в большинстве приложений. |
Аппаратные средства в комплекте
20-контактный прямой разъемный разъем 0,1″ и две 2-контактные клеммные колодки 5 мм входят в комплект поставки привода двигателя, как показано на рисунке ниже. Вы можете использовать клеммные колодки для подключения двигателя и питания двигателя, или вы можете отломить секцию 8 × 1 0,1-дюймовой контактной полосы и припаять ее к меньшим сквозным отверстиям, которые граничат с четырьмя большими контактными площадками двигателя и двигателя. . Однако обратите внимание, что клеммные колодки рассчитаны только на 16 А, а каждая пара штыревых контактов рассчитана только на суммарный ток 6 А, поэтому для приложений с большей мощностью толстые провода следует припаивать непосредственно к плате.
. Однако обратите внимание, что клеммные колодки рассчитаны только на 16 А, а каждая пара штыревых контактов рассчитана только на суммарный ток 6 А, поэтому для приложений с большей мощностью толстые провода следует припаивать непосредственно к плате.
Держатель привода двигателя VNH5019 с включенным оборудованием. |
|---|
Припайка 0,1-дюймовых разъемов к логическим соединениям позволяет использовать специальные кабели или макетные платы без пайки, либо провода можно припаять непосредственно к плате для более компактной установки. Соединения двигателя и питания двигателя не должны выполняться через макетную плату.
Драйвер двигателя включает электролитический силовой конденсатор емкостью 47 мкФ, и есть место для добавления дополнительных конденсаторов (например, для компенсации длинных проводов питания или повышения стабильности источника питания). Дополнительные силовые конденсаторы обычно не требуются, и в этот драйвер двигателя дополнительные конденсаторы не входят.
Два монтажных отверстия предназначены для использования с винтами № 2 (не входят в комплект).
Схематическая диаграмма
Схематическая диаграмма шасси Pololu VNH5019. |
|---|
Эта схема также доступна для скачивания в формате pdf: Схема несущей платы VNH5019 (34k pdf) чувствительные резисторы (R10 в на схеме выше), что приводит к выходному току (CS) приблизительно 210 мВ/А. Этот резистор теперь был изменен на 1k для лучшей совместимости с системами 3 В, обеспечивая выход CS примерно 140 мВ/А.
Сравнение ВНх4СП30, ВНх3СП30 и ВНХ5019
Тепловое изображение нижней части держателя привода двигателя VNH5019 во время одного из наших текущих испытаний. |
|---|
В дополнение к этому держателю VNH5019 мы предлагаем несущие платы для двух аналогичных более старых драйверов двигателей от ST: VNh4SP30 и VNh3SP30. VNH5019является единственным из трех с практическим рабочим напряжением выше 16 В, и только он работает с логикой 3 В.
Текущие значения в приведенной ниже таблице (т. е. записи, к которым применяется сноска 3) являются результатами тестирования только одной или двух версий драйверов каждой версии, поэтому они не учитывают возможные различия между устройствами. Таким образом, значения следует рассматривать как грубые оценки производительности, а не как гарантии производительности. Хотя эти тесты, кажется, показывают, что VNh3SP30 работает немного холоднее и, следовательно, может обеспечивать более длительный ток, чем VNH5019., важно отметить, что три версии драйвера были протестированы в разное время в потенциально разных условиях, поэтому результаты не обязательно являются точными показателями относительной производительности.
В наших тестах мы заметили, что тепловая защита на VNH5019 срабатывала при более низкой температуре (153°C), чем на VNh3SP30 (170°C), что может частично объяснить более короткое время перегрева VNH5019. Однако мы также заметили, что температура VNH5019 несколько выше, чем у VNh3SP30 при использовании в тех же условиях: VNH5019достигла температуры 85°С через 3 минуты при 10 А, в то время как ВНх3СП30 достигла температуры 80°С.
В следующей таблице представлено сравнение трех драйверов:
| ВНх4СП30 | ВНх3СП30 | ВНХ5019 | |
|---|---|---|---|
| Рабочее напряжение: (1) | 5,5–16 В (2) | 5,5 – 16 В | 5,5 – 24 В |
| MOSFET Сопротивление во включенном состоянии (на ногу): | 34 мОм тип. | 19 мОм макс. | 18 мОм тип. |
| Максимальная частота ШИМ | 10 кГц | 20 кГц | 20 кГц |
| Чувствительность тока | нет данных | 0,13 В/А тип. | 0,14 В/А тип. |
| Отключение при перенапряжении | 36 В мин. (2) / 43 В тип. | 16 В мин. / 19 В тип. | 24 В мин. / 27 В тип. |
| Верхний порог логического входа | 3,25 В мин. | 3,25 В мин. | 2,1 В мин. |
| Время до перегрева при 20 А (3) | 8 с | 35 с | 20 с |
| Время до перегрева при 15 А (3) | 30 с | 150 с | 90 с |
| Ток для неограниченного времени работы (3) | 9А | 14 А | 12 А |
1 VNh4SP30 выдерживает входное напряжение до 40 В, а VNh3SP30 и VNH5019 — до 41 В, но защита от перенапряжения срабатывает при более низком напряжении.
2 Хотя защита от перенапряжения в ВНх4СП30 не срабатывает до 36 В, по нашему опыту, сквозные токи делают работу ШИМ непрактичной при напряжении выше 16 В.
3 Типичные результаты с использованием несущих плат драйверов двигателей Pololu со 100% рабочим циклом при комнатной температуре (без принудительного воздушного потока или отвода тепла за пределы несущей печатной платы).
Датчик тока
Выход датчика тока составляет примерно 140 мВ/А. Обратите внимание, что выход активен только во время работы Н-моста; он неактивен (низкий уровень), когда привод движется по инерции (выходные сигналы двигателя имеют высокий импеданс) или тормозит. Во время выбега цикла движения/выбега ток будет продолжать циркулировать через двигатель, но напряжение на выводе FB не будет точно отражать ток двигателя.
Учет рассеиваемой мощности в реальных условиях
Максимальный номинальный ток непрерывного тока ИС драйвера двигателя составляет 30 А. Однако микросхемы сами по себе будут перегреваться при более низких токах (типичные значения см. в таблице выше). Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя предназначена для отвода тепла от микросхем драйвера двигателя, но производительность можно улучшить, добавив радиатор. В наших тестах мы смогли обеспечить короткие промежутки (порядка миллисекунд) 30 А и несколько секунд 20 А без перегрева. При 6 А чип становится едва заметно теплым на ощупь. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Однако микросхемы сами по себе будут перегреваться при более низких токах (типичные значения см. в таблице выше). Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя предназначена для отвода тепла от микросхем драйвера двигателя, но производительность можно улучшить, добавив радиатор. В наших тестах мы смогли обеспечить короткие промежутки (порядка миллисекунд) 30 А и несколько секунд 20 А без перегрева. При 6 А чип становится едва заметно теплым на ощупь. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Многие контроллеры двигателей или регуляторы скорости могут иметь номинальный пиковый ток, значительно превышающий номинальный постоянный ток; это не относится к этим драйверам двигателей, которые имеют непрерывный номинальный ток 30 А и защиту от перегрузки по току, которая может срабатывать при 30 А (обычно 50 А).
