Содержание
54 Механизм переключения передач
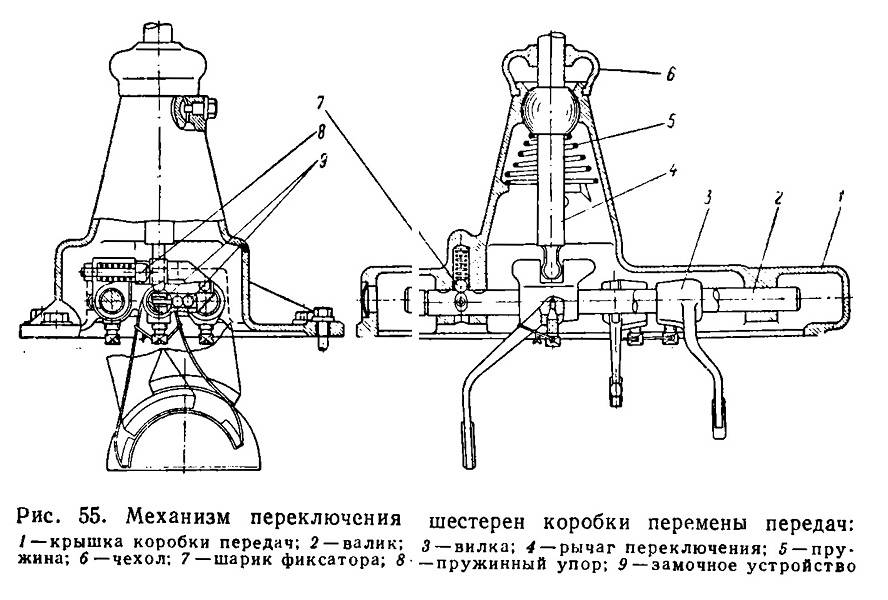
Механизм переключения передач предназначен для введения в зацепление блок-шестерни одной из передач.
Гидроцилиндр механизма переключения передач установлен в отверстии крышки поз. 1. Он состоит из корпуса поз. 3, крышки поз. 6 и поршня поз. 4. Корпус, крышка и шток для герметичности уплотнены резиновыми кольцами поз. 14 и поз. 15. Масло к гидроцилиндру подается через два резьбовых отверстия корпуса поз. 3. Шток шарнирно соединен осью поз. 5 с вилкой поз. 2, которая укреплена на шлицах валика поз. 8, установленного в двух втулках поз. 9. Поворачивая валик ключом, можно вручную производить включение и отключение блок-шестерни (на чертеже не показана). При подаче масла в гидроцилиндр поршень поз. 4 сообщает требуемое возвратно-поступательное движение вилке поз. 2, тем самым включая или выключая блок-шестерню.
Сортировка:
По умолчаниюНазвание (А — Я)Название (Я — А)Цена (низкая > высокая)Цена (высокая > низкая)Рейтинг (начиная с высокого)Рейтинг (начиная с низкого)Модель (А — Я)Модель (Я — А)
Показать:
15255075100
МЧ00.
 54.00.01 — Крышка
54.00.01 — Крышка
Чертеж и модель детали. Версия программы Компас 16.Файл чертежа:МЧ00.54.00.01 — Крышка.cdwФайл модел..
$2.00
МЧ00.54.00.01 — Крышка — чертеж
В архиве находится файл чертежа. Версия программы Компас 16.МЧ00.54.00.01 — Крышка — чертеж.cdw..
$1.00
МЧ00.54.00.02 — Вилка
Чертеж и модель детали. Версия программы Компас 16.Файл чертежа:МЧ00.54.00.02 — Вилка.cdwФайл модели..
$2.00
МЧ00.54.00.02 — Вилка — чертеж
В архиве находится файл чертежа. Версия программы Компас 16.МЧ00.54.00.02 — Вилка — чертеж.cdw..
$1.00
МЧ00.54.00.03 — Корпус
Чертеж и модель детали. Версия программы Компас 16.Файл чертежа:МЧ00.54.00.03 — Корпус.cdwФайл модел..
$2.00
МЧ00.
 54.00.03 — Корпус — чертеж
54.00.03 — Корпус — чертеж
В архиве находится файл чертежа. Версия программы Компас 16.МЧ00.54.00.03 — Корпус — чертеж.cdw..
$1.00
МЧ00.54.00.04 — Поршень
Чертеж и модель детали. Версия программы Компас 16.Файл чертежа:МЧ00.54.00.04 — Поршень.cdwФайл моде..
$2.00
МЧ00.54.00.04 — Поршень — чертеж
В архиве находится файл чертежа. Версия программы Компас 16.МЧ00.54.00.04 — Поршень — чертеж.cdw..
$1.00
МЧ00.54.00.05 — Ось
Чертеж и модель детали. Версия программы Компас 16.Файл чертежа:МЧ00.54.00.05 — Ось.cdwФайл модели:М..
$2.00
МЧ00.54.00.05 — Ось — чертеж
В архиве находится файл чертежа. Версия программы Компас 16.МЧ00.54.00.05 — Ось — чертеж.cdw..
$1.00
МЧ00.
 54.00.06 — Крышка
54.00.06 — Крышка
Чертеж и модель детали. Версия программы Компас 16.Файл чертежа:МЧ00.54.00.06 — Крышка.cdwФайл модел..
$2.00
МЧ00.54.00.06 — Крышка — чертеж
В архиве находится файл чертежа. Версия программы Компас 16.МЧ00.54.00.06 — Крышка — чертеж.cdw..
$1.00
МЧ00.54.00.07 — Пластинка
Чертеж и модель детали. Версия программы Компас 16.Файл чертежа:МЧ00.54.00.07 — Пластинка.cdwФайл мо..
$2.00
Показано с 1 по 15 из 24 (всего 2 страниц)
14.1702005-10 Механизм переключения передач в сб от официального дилера
ТД РИАТ-Запчасть
УСПЕХ В ДЕТАЛЯХ
Корзина [ 0 ]
ВНИМАНИЕ!!! Цены указаны на условиях 100% предоплаты и самовывоза со склада в г.Набережные Челны.
Предложение не является публичной офертой.
- Схема
- Применяемость
- Описание
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
КамАЗ-5320 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-53212 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-5410 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-54112 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-5511 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-55102 → Механизм переключения передач в сборе → Механизм переключения передач
Общий (см. мод-ции) → Механизм переключения передач в сборе → Механизм переключения передач
мод-ции) → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-4310 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-65115 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-43114 → Механизм переключения передач в сборе → Коробка передач с картером сцепления
КамАЗ-43101 → Механизм переключения передач в сборе → Механизм переключения передач
КамАЗ-6540 → Механизм переключения передач в сборе → Коробка передач в сборе
КамАЗ-4326 (каталог 2003г) → Механизм переключения передач в сборе → Коробка передач с картером сцепления
КамАЗ-43118 → Механизм переключения передач в сборе → Коробка передач
КамАЗ-53228, 65111 → Механизм переключения передач в сборе → Коробка передач с картером сцепления
Купить Механизм переключения передач в сб — К14.1702005-10 по низкой цене
Механизм переключения передач в сб / 14.1702005-10 (КАМАЗ). Вы можете приобрести оригинальную запчасть или её аналог по низкой цене оптом и в розницу — наши менеджеры помогут вам выбрать, что подойдет для вашего автомобиля. Мы осуществляем доставку по всем регионам России с наших складов в городах: Набережные Челны, Казань, Нижневартовск, Ноябрьск, Бузулук, Когалым, Нефтеюганск, Свободный, Мурманск, Сургут и Новый Уренгой.
Мы осуществляем доставку по всем регионам России с наших складов в городах: Набережные Челны, Казань, Нижневартовск, Ноябрьск, Бузулук, Когалым, Нефтеюганск, Свободный, Мурманск, Сургут и Новый Уренгой.
Если у вас есть вопросы по работе Механизм переключения передач в сб / К14.1702005-10 или узла, механизма, агрегата, технические специалисты нашей компании помогут разобраться.
Не нашли нужных комплектующих в каталоге запчастей? Напишите нам в чат, через форму на сайте или закажите звонок. Мы свяжемся с вами и подберём то, что нужно.
Планетарная передача | КХК
ВЕРШИНА
Знание передач
Технический справочник по шестерням
>
>
>
 org/ListItem»>
org/ListItem»>Планетарный зубчатый механизм
Трансмиссия и планетарная передача
Многие «шестерни» используются для автомобилей, но они также используются для многих других машин. Наиболее типичным из них является «трансмиссия», которая передает мощность двигателя на шины. В целом трансмиссия автомобиля играет две роли: первая заключается в замедлении высокой скорости вращения, создаваемой двигателем, для передачи на шины; другой — изменить передаточное число в соответствии с ускорением/замедлением или скоростью движения автомобиля.
Частота вращения двигателя автомобиля в общем режиме движения составляет 1000-4000 оборотов в минуту (17-67 в секунду). Так как невозможно вращать шины с одинаковой скоростью вращения для запуска, необходимо снизить скорость вращения, используя соотношение числа зубьев шестерни. Такая роль называется замедлением; отношение скорости вращения двигателя к скорости вращения колес называется передаточным числом.
Тогда зачем менять передаточное отношение в зависимости от ускорения/торможения или скорости движения? Это связано с тем, что веществам требуется большая сила, чтобы начать движение, однако им не требуется такая большая сила, чтобы продолжать движение после того, как они начали движение. В качестве примера можно привести автомобиль. Однако двигатель по своей природе не может так тонко изменять свою мощность. Следовательно, его мощность регулируется путем изменения передаточного отношения с помощью трансмиссии.
В качестве примера можно привести автомобиль. Однако двигатель по своей природе не может так тонко изменять свою мощность. Следовательно, его мощность регулируется путем изменения передаточного отношения с помощью трансмиссии.
Передача движущей силы через шестерни очень напоминает принцип рычага (рычага). Отношение числа зубьев шестерен, входящих в зацепление друг с другом, можно принять за отношение длин плеч рычагов. То есть, если передаточное отношение велико, а скорость вращения на выходе низка по сравнению со скоростью на входе, выходная мощность при передаче (крутящий момент) будет большой; с другой стороны, если скорость вращения на выходе не такая низкая по сравнению со скоростью на входе, выходная мощность при передаче (крутящий момент) будет небольшой. Таким образом, изменение передаточного отношения с помощью трансмиссии очень похоже на принцип перемещения вещей.
Тогда как трансмиссия меняет передаточное число? Ответ кроется в механизме, называемом планетарным зубчатым механизмом.
Планетарная передача представляет собой зубчатую передачу, состоящую из 4 компонентов, а именно солнечной шестерни A, нескольких планетарных шестерен B, внутренней шестерни C и водила D, которое соединяет планетарные шестерни, как показано на графике ниже. Он имеет очень сложную структуру, что затрудняет его проектирование или производство; он может реализовать высокое передаточное отношение с помощью шестерен, однако этот механизм подходит для механизма редуктора, который требует как небольшого размера, так и высокой производительности, например, трансмиссии для автомобилей.
График 17.1: Структура планетарного механизма
Планетарные зубчатые механизмы имеют свойство изменять передаточное отношение, выбирая, какой из компонентов должен быть зафиксирован.
Например, предположим, что внутренняя шестерня C зафиксирована, входная ось соединена с солнечной шестерней A, а водило выходной оси D. Когда солнечная шестерня A совершает один оборот,
планетарная шестерня B будет вращаться раз.
Если внутренняя шестерня C не зафиксирована, а вместо нее закреплено водило D, когда планетарная шестерня B совершает один оборот, внутренняя шестерня C будет вращаться несколько раз.
Это означает, что когда солнечная шестерня A совершает один оборот, внутренняя шестерня C будет совершать один оборот.
Но так как в действительности внутреннее зубчатое колесо С неподвижно, а водило D будет двигаться, то весь планетарный зубчатый механизм следует рассматривать только как число оборотов.
Затем солнечная шестерня A будет вращаться раз и 9 раз.0027 несущей D раз, что приводит к уменьшению коэффициента .
Далее, предположим, что водило D зафиксировано, входная ось соединена с солнечной шестерней A, а выходная ось планетарной шестерни C. В этом случае планетарная шестерня B будет вращаться только для передачи движущей силы как неосновная шестерня. Кроме того, поскольку внутренняя шестерня C будет вращаться в направлении, обратном солнечной шестерне A, передаточное число будет равно.
Таким образом, фиксируя и вращая компоненты зубчатого механизма, трансмиссия изменяет передаточное отношение, не требуя большого механизма.
Приложение – Планетарный редуктор
Эта статья воспроизводится с разрешения.
Масао Кубота, Хагурума Нюмон, Токио: Ohmsha, Ltd., 1963.
Планетарная передача представляет собой зубчатую передачу, состоящую из шестерни (солнечной шестерни), которая закреплена или вращается вокруг фиксированного центра, и шестерни (планетарной шестерни), вращающейся вокруг центра, который вращается вокруг солнечной шестерни. На рис. 12.9 показана простейшая планетарная передача. Когда шестерня A (количество зубьев α) зафиксирована (фиксированная солнечная шестерня), а рычаг C вращается в направлении ωc, а шестерня B (планетарная шестерня, число зубьев b) вращается при вращении.
Рис 12.9 Очень простая планетарная передача
Приняв угловую скорость пространства, в котором он вращается, за ωb, получим связь между ωb и ωc. Во-первых, скорость v2 в центре O2 планетарной шестерни B равна ωc на O1O2. С другой стороны, точка P зафиксирована, потому что шестерня A не вращается. Поскольку шестерня B вращается вокруг точки B с угловой скоростью со скоростью ωb, v2 = ωb по PO2. Следовательно,
Поскольку шестерня B вращается вокруг точки B с угловой скоростью со скоростью ωb, v2 = ωb по PO2. Следовательно,
ωb /ωc = O1O2 / PO2 = a + b / b
(12.3)
В качестве альтернативы вы можете рассмотреть следующее: рассмотрите вращение, когда шестерня A и B находятся в зацеплении, а рычаг C фиксируется как обычное зацепление, затем придайте A обратное вращение, в то время как A, B и C взаимно зафиксированы. Затем вращение A становится равным 0 (фиксированное), а вращение B и C показано в таблице 12.1.
Таблица 12.1
| А | Б | С | ||
| Против С | 1 | – а/б | 0 | |
| С С | -1 | -1 | -1 | (+ |
| 0 | – (1+а/б) | -1 |
Когда C вращается на -1 оборот, B вращается – (a+b) / b и соответствует результату формулы 12.3.
Рис. 12.10 Реверсивная планетарная передача с внешним зацеплением
12.10 Реверсивная планетарная передача с внешним зацеплением
На Рис. 12.10 показана типичная реверсивная планетарная передача, которая поворачивается назад и передает вращение от неподвижной солнечной шестерни к концентрически вращающейся солнечной шестерне через планетарную шестерню. Вы можете получить большое передаточное отношение, используя небольшую машину. Этот механизм используется для понижающей/ускоряющей передачи. На рисунке выше зацепление представляет собой солнечную шестерню A -> планетарная шестерня B -> планетарная шестерня C (сцепленная с шестерней B) -> солнечная шестерня D (концентричная по отношению к шестерне B, но не соединенная с ней) и шестерня А неподвижен, а рука Е вращается.
Чтобы получить передаточное отношение, сначала зафиксируйте рычаг Е и получите оборот каждой шестерни за один оборот шестерни А, затем рассчитайте количество оборотов каждой шестерни, задав шестерне А -1 оборот, как в таблице 12.2.
Таблица 12.2
| А | Б | С | Д | Е | ||
| Против Е | + 1 | – а/б | – а/б | ак / бд | 0 | |
| С Е | -1 | –1 | -1 | –1 | -1 | (+ |
| 0 | – (1+а/б) | – (1+а/б) | – (1-акр/сп) | -1 |
Следовательно, если угловая скорость рычага равна ωe, угловая скорость ωd солнечной шестерни D выражается по следующей формуле:
ωd = – (ac / bd – 1) ωe
(12,4)
В этом случае D вращается обратно к E, когда ac>bd, D и E вращаются синхронно, когда ac Если значения ac и bd почти одинаковы, можно получить большое соотношение скоростей.
Если значения ac и bd почти одинаковы, можно получить большое соотношение скоростей.
В дополнение к вышеперечисленным существуют различные формы планетарных передач, например, с внутренним зацеплением, как на рис. 12.11 и в таблице 12.3, или с коническим зубчатым колесом, как на рис. 12.12.
При замене любого внешнего зубчатого колеса внутренним зубчатым колесом используйте знак минус для радиуса делительной окружности в формуле передаточного числа.
Рис 12.11 Планетарная передача обратного хода с внутренним зацеплением
Рис 12.12 Планетарная передача с коническим зацеплением
Таблица 12.3
Ссылки по теме :
Зубчатые передачи
Понимание механизма охотничьего снаряжения на кораблях
0
акции
Рулевое управление является неотъемлемой частью любого судна. Рулевой механизм контролирует функцию системы руля, которая, в свою очередь, время от времени контролирует маневрирование или поворот судна.
Рулевой механизм контролирует функцию системы руля, которая, в свою очередь, время от времени контролирует маневрирование или поворот судна.
Важнейшим краеугольным камнем конструкции любого рулевого привода является передача усилий, необходимых для управления системой руля таким образом, чтобы судно соответственно поворачивало или изменяло направление.
Представьте, что большой танкер с сырой нефтью поворачивается от его первоначального направления на угол 45 градусов в плохих погодных условиях. Потянув за рычаги на мостиковой палубе или нажимая кнопки или цифровые экраны в современном дизайне, огромное судно поворачивается на нужный угол за несколько минут!
Благодаря продуманной и современной конструкции систем рулевого управления.
Несмотря на то, что на старых судах, таких как пароходы, в основном с механическими системами, этот процесс был более сложным и требовал больше времени, основной принцип работы был тот же: передача момента на руль, что увеличивало значения этого момента до таких больших указывает, что судно повернется в желаемую ориентацию.
Большинство из вас, должно быть, знакомы с использованием домкрата при замене автомобильных шин. Основным принципом работы является то, что мы называем механическим преимуществом или усилением сил, так что приложение небольшого количества силы приводит к большому значению, достаточному для подъема полноразмерного автомобиля.
Тот же принцип широко использовался в рулевом механизме на старых кораблях. После достижений в области гидравлических технологий большинство конструкций механизмов рулевого управления стали ориентироваться на системы с гидравлическим приводом. В настоящее время в большинстве рулевых приводов большинства судов используется один из двух типов систем:
- Электрогидравлическая
- Полностью электрический
В то время как электрогидравлические системы используют принципы гидравлики с компонентными системами и соединительными узлами, приводимыми в действие электричеством, полностью электрическая или полностью электрическая система является наиболее мощной (обычно используется во всех современных конструкциях) и просто управляет движением руля с помощью автоматизированные двигатели и системы, полностью приводимые в действие электроэнергией высокого напряжения. Электрогидравлические системы, в свою очередь, используют два типа механизмов: поршневой и лопастной.
Электрогидравлические системы, в свою очередь, используют два типа механизмов: поршневой и лопастной.
Одним из очень важных компонентов типичной электрогидравлической системы является рычажный механизм. Помните, это не имеет ничего общего с настоящей охотой!
Механизм охотничьего снаряжения и его необходимость
Прежде чем узнать, как работает механизм охотничьего снаряжения, важно иметь краткое представление о конструкции и работе основного электрогидравлического рулевого механизма на судах. Система рулевого управления в целом состоит из трех частей:
- Системы управления и оборудование: Все это различная атрибутика и оборудование, получающие первичные инструкции с мостика или ходовой палубы. На мостиковой палубе первичное решение маневра принимается капитаном или капитаном. Эти системы управления в унисон активируют остальную часть системы и передают сигналы, напрямую подключаясь к рулевому устройству. На большинстве современных судов они включают в себя передатчики, приемники, кабели, трубопроводы и первичные электродвигатели и насосы.

- Блоки питания: Основной источник питания систем руля направления. К ним относятся насосы большой мощности, двигатели, генераторы, генераторы переменного тока и точки питания, активируемые системами управления.
- Блоки трансмиссии: Они напрямую поглощают электрическую энергию высокого напряжения от блоков питания и основных источников питания и преобразуют ее в механическую и гидравлическую энергию, необходимую для управления блоком главного рулевого механизма желаемым образом. Они несут ответственность не только за передачу мощности, но и за желаемое управление блоком руля направления.
- Главный рулевой механизм или блок руля : Состоит из руля направления и связанных с ним поворотных блоков.
Когда мы говорим о сопутствующих механизмах, первое, что приходит на ум, это румпель, который напрямую связан с рулем направления и поворачивает его соответственно приложенному моменту. Этот конечный приводной момент возникает из-за гидравлических сил из-за изменений давления в непосредственно подключенном насосе для всех практических целей.
Этот конечный приводной момент возникает из-за гидравлических сил из-за изменений давления в непосредственно подключенном насосе для всех практических целей.
Насос с механическим приводом от Датчик с плавающим рычагом , который, в свою очередь, питается от электроэнергии и работает на основе инструкций от телемотора, который получает передаваемые электрические сигналы от блоков управления и подключен к одному концу этого рычага.
Телемотор является важным компонентом, выступающим в качестве промежуточного звена в этой последовательности операций. Функция телемотора двояка. Во-первых, он получает электрические сигналы с настила мостика через свой передатчик 9.0349 . Затем он далее подключает этот сигнал к приемнику , расположенному в отделении главного рулевого устройства.
Приемник далее передает эти сигналы на блоки управления и питания, основной задачей которых является привод системы рулевого управления. Итак, телемотор входит в состав узла трансмиссии системы рулевого управления.
Итак, телемотор входит в состав узла трансмиссии системы рулевого управления.
Телемотор представляет собой гидравлическую систему управления с разветвленной сетью, которая проходит от настила мостика до системы рулевого управления через кабели и поддерживающие трубопроводы вместе с подходящими зарядными устройствами. Все современные телемоторы относятся к электрическому типу, в то время как на старых судах использовались механически связанные системы, в состав которых входил телемоторный блок.
Подробное описание телемотора сложное и выходит за рамки данной статьи.
Теперь обратите внимание, что одной из основных задач телемотора является передача электрических сигналов на блоки управления, отвечающие за поворот блока руля на желаемые углы поворота при приложении желаемого крутящего момента или поворотного момента.
Этот блок управления является важнейшим звеном между телемотором и силовым агрегатом, передающим крутящий момент на румпель и, наконец, на руль направления. Таким образом, при взаимодействии блоков питания и управления руль получает необходимую мощность в нужном направлении для поворота судна, как показано на схеме ниже.
Таким образом, при взаимодействии блоков питания и управления руль получает необходимую мощность в нужном направлении для поворота судна, как показано на схеме ниже.
Теперь представьте процесс в обратном порядке. Что происходит после того, как руль ориентируется в нужном направлении и судно достигает требуемого угла поворота? Здесь вступает в действие механизм охотничьего снаряжения. Механизм Hunting gear предназначен для работы в обратном направлении и передачи результирующего действия руля обратно на все соединительные узлы выше.
После того, как руль делает нужный поворот, действие захватывается системой рычажной передачи, что, в свою очередь, останавливает работу силового агрегата, отключая питание, необходимое для создания больших рулевых моментов. После прекращения подачи питания на блок руля все другие взаимосвязанные элементы рулевого привода получают эти сигналы обратной связи.
Кроме того, в результате охотничий механизм также изменяет положение плавающего рычага или тяги управления (в нейтральное положение), установленных на упомянутом выше гидравлическом регулируемом насосе, изменяя условия нагнетания, ходы и подачу последнего. Рычаг охоты соединен с одним концом этого рычага (другим концом является система телемотора, как упоминалось выше). Следовательно, охотничье снаряжение по существу представляет собой механизм управления рулевым механизмом с обратной связью.
Рычаг охоты соединен с одним концом этого рычага (другим концом является система телемотора, как упоминалось выше). Следовательно, охотничье снаряжение по существу представляет собой механизм управления рулевым механизмом с обратной связью.
Охотничье снаряжение проще представить на примере автомобильного усилителя руля. Когда вы поворачиваете автомобиль в нужном направлении и отпускаете руль, рулевое управление автоматически отключается, и поворот в нужном направлении прекращается.
Но в старых автомобилях с ручным рулевым управлением водителю приходилось прилагать больше усилий, чтобы изменить положение автомобиля в новом направлении и остановить поворот, повернув руль в обратном направлении. Это жизнеспособный вариант для автомобилей, поскольку у вас есть приличный контроль над своим транспортным средством и довольно точное понимание движений на дороге.
Но для кораблей это практически невозможно. Здесь вы не можете просто «сделать поворот», поскольку любая форма ошибки в углах отклонения может изменить весь курс курса даже без вашего знания бесконечных водных пространств.
Точные и определенные значения угла поворота всегда должны быть указаны с мостика или штурманской палубы. Кроме того, после того, как руль направления получил команду выполнить это отклонение, должен быть способ гарантировать, что после достижения точного поворота должен быть механизм, чтобы установить это и, в то же время, отключить питание руля. системы таким образом, что весь процесс токарной обработки немедленно останавливается. На больших кораблях, путешествующих по морям, это никогда не достигается человеческими усилиями.
Другое важное связанное с этим использование охотничьего снаряжения заключается в том, что оно действует как постоянный возвратно-поступательный механизм, который изменяет положение руля, когда заданное отклонение нарушается волнами и другими морскими условиями, что вполне нормально. Принцип остается прежним: любое отклонение конфигурации руля фиксируется этим рычажным механизмом, и он инициирует другое подключенное оборудование, и они, в унисон, еще раз возвращают руль обратно на его первоначальный угол.
Впрочем, физика не очень сложная. В двух словах, это случай реакции, определяемой третьим законом Ньютона, когда момент руля добавляется к механизму охотника, который затем приводится в действие и полностью останавливает остальную часть рулевого механизма. Детальное функционирование охотничьего снаряжения очень сложно и выходит за рамки нашей компетенции.
На современных кораблях с передовыми технологиями, наряду с электрическими, механическими, электромеханическими и гидравлическими сигналами, охотничьи снасти также широко используют автоматизацию и цифровые системы, которые еще больше упрощают процесс.
Вы также можете прочитать-
- Что такое осадка судов?
- Что такое посадочные лестницы?
- Что означает мореходность судов?
- Типы корпусов, используемых для судов
Отказ от ответственности: Мнения авторов, выраженные в этой статье, не обязательно отражают точку зрения Marine Insight.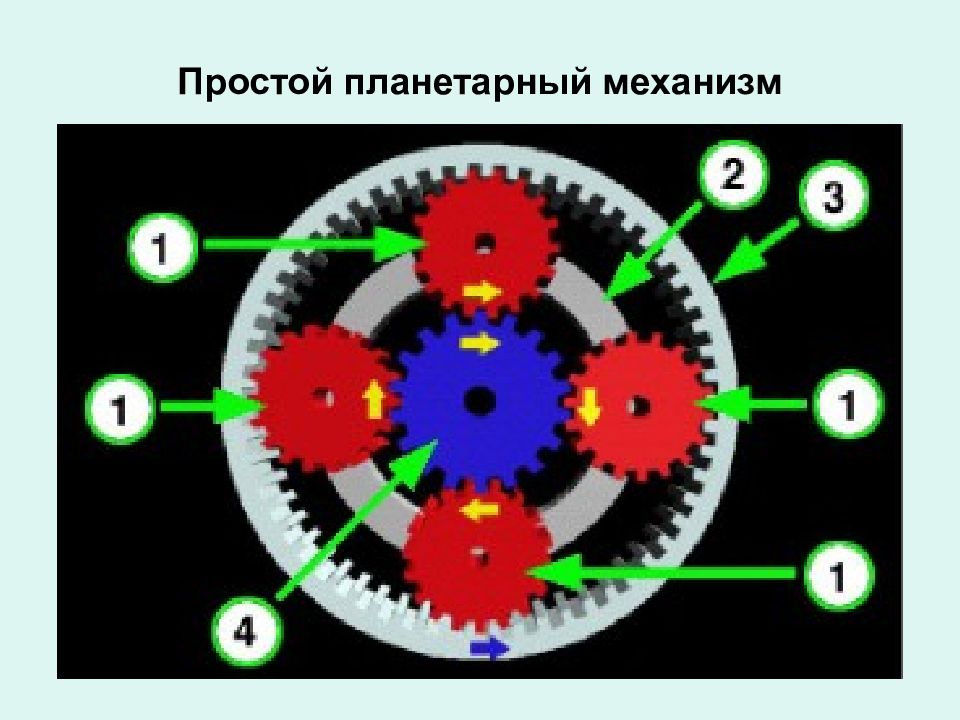 Данные и диаграммы, если они используются в статье, были получены из доступной информации и не были подтверждены каким-либо установленным законом органом. Автор и компания Marine Insight не претендуют на точность и не несут за это никакой ответственности. Взгляды представляют собой только мнения и не представляют собой каких-либо указаний или рекомендаций относительно какого-либо курса действий, которым должен следовать читатель.
Данные и диаграммы, если они используются в статье, были получены из доступной информации и не были подтверждены каким-либо установленным законом органом. Автор и компания Marine Insight не претендуют на точность и не несут за это никакой ответственности. Взгляды представляют собой только мнения и не представляют собой каких-либо указаний или рекомендаций относительно какого-либо курса действий, которым должен следовать читатель.
Статья или изображения не могут быть воспроизведены, скопированы, переданы или использованы в любой форме без разрешения автора и Marine Insight.
Похожие сообщения
Об авторе
Субходип окончил факультет военно-морской архитектуры и морской инженерии. Интересуясь тонкостями морских сооружений и аспектами целевого проектирования, он посвятил себя обмену и распространению общих технических знаний в этом секторе, который в данный момент требует поворота, чтобы вернуться к своей былой славе.