

Содержание
Кривошипно-шатунный механизм
Кривошипно-шатунный механизм
Для чего служит кривошипно-шатунный механизм?
Кривошипно-шатунный механизм служит для преобразования возвратно-поступательного движения во вращательное, и наоборот.
Из скольких звеньев состоит кривошипно-шатунный механизм?
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Кривошипно-шатунный механизм состоит из четырех звеньев: стойки, кривошипа, шатуна и поршня. Если ведущим звеном является поршень, то в криво-шипно-шатунном механизме происходит преобразование возвратно-поступательного движения во вращательное. Если же ведущим звеном является кривошип, то механизм преобразует вращательное движение кривошипа в возвратно-поступательное движение поршня (например, механизм поршневого насоса и т. п.).
—
На изучаемых автомобилях устанавливают V-образные, четырехтактные двигатели с жидкостным охлаждением. Двигатели 3M3-53-11 и ЗИЛ-130 (карбюраторные и газовые) с внешним смесеобразованием и принудительным воспламенением от электрической искры. Двигатель ЗИЛ-645 — дизельный, с внутренним смесеобразованием И’воспламенением от соприкосновения с нагретым в результате сильного сжатия воздухом.
Двигатели 3M3-53-11 и ЗИЛ-130 (карбюраторные и газовые) с внешним смесеобразованием и принудительным воспламенением от электрической искры. Двигатель ЗИЛ-645 — дизельный, с внутренним смесеобразованием И’воспламенением от соприкосновения с нагретым в результате сильного сжатия воздухом.
Двигатели состоят из кривошипно-шатунного и газораспределительного механизмов и систем охлаждения, смазочной, питания, пуска и зажигания (у карбюраторных двигателей).
Кривошипно-шатунный механизм состоит из неподвижных (блока цилиндров, головки цилиндров, картера, поддона картера) и подвижных (поршней с пальцами и кольцами, шатунов, коленчатого вала с подшипниками, маховика) деталей.
Неподвижные детали. Блок цилиндров (рис. 1) является базовой деталью двигателя и представляет собой общую отливку с картером. В верхней части блока имеются отверстия для установки гильз цилиндров, расположенных в блоке в 2 ряда с углом развала 90°, что позволяет на одной шейке коленчатого вала устанавливать по 2 шатуна. Блок цилиндров двигателя 3M3-53-11 отливают из алюминиевого сплава, а двигателей ЗИЛ-130 и -645 — из серого чугуна. Нижняя часть отливки блока цилиндров является картером, в котором имеются постели для установки коленчатого вала и отверстия для распределительного вала.
Блок цилиндров двигателя 3M3-53-11 отливают из алюминиевого сплава, а двигателей ЗИЛ-130 и -645 — из серого чугуна. Нижняя часть отливки блока цилиндров является картером, в котором имеются постели для установки коленчатого вала и отверстия для распределительного вала.
Гильзы цилиндров, устанавливаемые на изучаемых двигателях,— мокрого типа (омываемые водой), изготавливают из серого легированного чугуна. Уплотнение гильз в нижней части осуществляется медным кольцом (у двигателя 3M3-53-11) или кольцами из маслобензостойкой резины (у двигателя ЭИЛ-130 кольца, у двигателя ЗИЛ-645 — 3: верхнее кольцо с конической наружной поверхность), нижние — круглого сечения). Для герметизации полостей цилиндров и жидкостной рубашки охлаждения кромки гильз выступают над верхней плоскостью блока на 0,02… 0,09 мм, что обеспечивает необходимое обжатие прокладки головки цилиндров по контурам гильз.
Рис. 1. Блок цилиндров V-образного двигателя: а — вид сверху; б — разрез;
1 —блок цилиндров; 2 — гильза цилиндра; 3 — рубашка охлаждения; 4— головка цилиндров; 5 — клапан; 6 — свеча зажигания; 7 — штанга толкателя; 8 — поршень; 9 — шатун; 10 — коленчатый вал
Головки цилиндров выполнены из алюминиевого сплава (у двигателей 3M3-53-11 и ЗИЛ-130) или чугуна (у двигателей ЗИЛ-645) по одной на каждый ряд цилиндров с вставными седлами и направляющими клапанор. Охлаждение головки цилиндров осуществляется жидкостью, циркулирующей во внутренней полости головки, которая вместе с внутренними полостями блока цилиндров составляет рубашку охлаждения 3 двигателя. Крепление каждой головки цилиндров к блоку у двигателя 3M3-53-11 осуществляется на шпильках 18-ю гайками (по 6 на каждый цилиндр), у двигателя ЗИЛ-130 — 17-ю болтами (по 5 на каждый цилиндр), у ЗИЛ-645 — 22-я болтами (по 7 на каждый цилиндр). Сверху головка цилиндров закрывается через прокладку крышкой. На правой крышКе двигателя ЗИЛ-645 имеется маслозаливная горловина.
Охлаждение головки цилиндров осуществляется жидкостью, циркулирующей во внутренней полости головки, которая вместе с внутренними полостями блока цилиндров составляет рубашку охлаждения 3 двигателя. Крепление каждой головки цилиндров к блоку у двигателя 3M3-53-11 осуществляется на шпильках 18-ю гайками (по 6 на каждый цилиндр), у двигателя ЗИЛ-130 — 17-ю болтами (по 5 на каждый цилиндр), у ЗИЛ-645 — 22-я болтами (по 7 на каждый цилиндр). Сверху головка цилиндров закрывается через прокладку крышкой. На правой крышКе двигателя ЗИЛ-645 имеется маслозаливная горловина.
Подвижные детали. Поршни имеют головку, бобышки для установки поршневого пальца и направляющую часть (юбку). На поршне делают кольцевые канавки для установки поршневых колец (рис. 2).
Рис. 2. Детали шатунио-поршневой группы двигателя ЗИЛ-130:
1 — маслосъемные кольца; 2 и 3 — осевой и радиальный расширители; 4 — чугунная вставка; 5 — компрессионные кольца; 6 — стопорное кольцо; 7— поршневой палец; 8 — поршень; 9 — шатун; 10— втулка; 11 — метка; 12 — шатунные вкладыши; 13 — крышка нижней головки шатуна
Поршни отливают из алюминиевого сплава.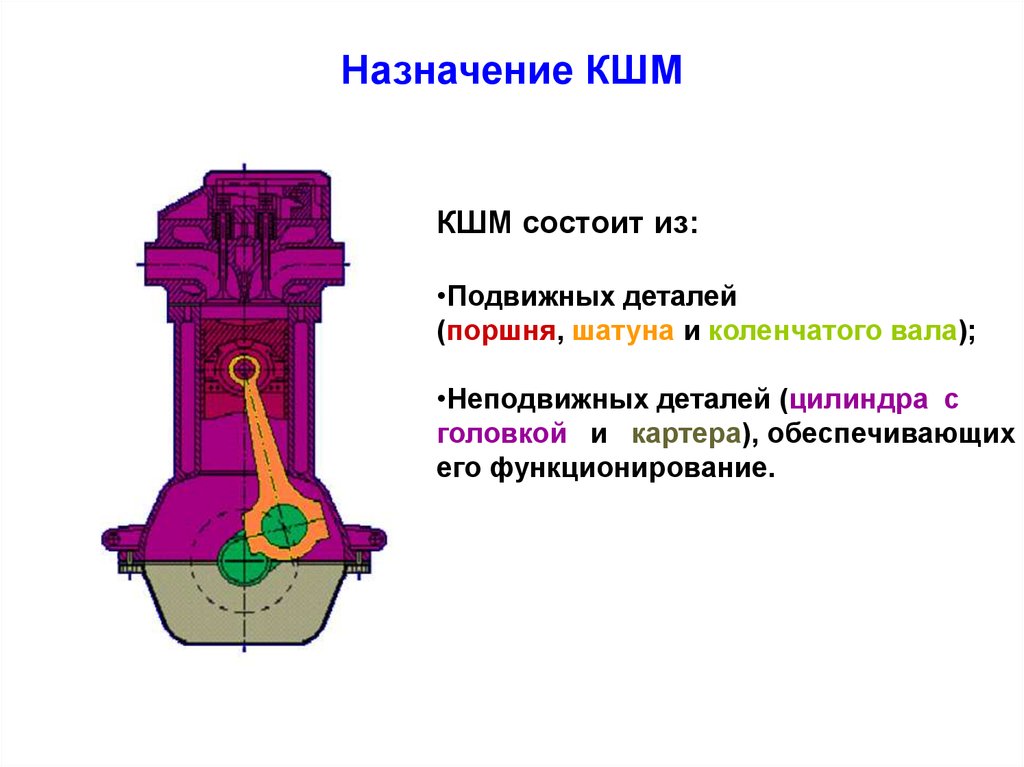 Направляющая часть поршней — разрезная. При сборке двигателей 3M3-53-11 и ЗИЛ-130 поршень устанавливают разрезом юбки в левую (по ходу автомобиля) сторону. На днище поршней двигателя ЗИЛ-645 имеется стрелка, которая при сборке с шатуном должна быть направлена в сторону, противоположную бобышке на поршневой головке шатуна, а при установке на двигатель должна быть направлена к развалу блока цилиндров.
Направляющая часть поршней — разрезная. При сборке двигателей 3M3-53-11 и ЗИЛ-130 поршень устанавливают разрезом юбки в левую (по ходу автомобиля) сторону. На днище поршней двигателя ЗИЛ-645 имеется стрелка, которая при сборке с шатуном должна быть направлена в сторону, противоположную бобышке на поршневой головке шатуна, а при установке на двигатель должна быть направлена к развалу блока цилиндров.
Поршневые кольца изготовляют из серого чугуна (компрессионные) или стали (маслосъемные). Компрессионные кольца имеют разрезы (замки). На поршнях устанавливаются (у двигателей 3M3-53-11 и ЗИЛ-645) или (у двигателя ЗИЛ-130) компрессионных кольца и одно маслосъемное. Маслосъемные кольца изготовляют составными с пружинными расширителями: у двигателя ЗИЛ-130 маслосъемное кольцо состоит из двух стальных колец и имеет 2 расширителя — радиальный и осевой, у двигателя ЗИЛ-645 один расширитель — радиальный. Рабочая поверхность колец имеет хромовое покрытие.
Поршневые пальцы выполняют пустотелыми из стали и закрепляют в бобышках поршней при помощи стопорных колец. Этот способ крепления позволяет поршневому пальцу поворачиваться в головке шатуна и в бобышках поршня (плавающий палец).
Этот способ крепления позволяет поршневому пальцу поворачиваться в головке шатуна и в бобышках поршня (плавающий палец).
Шатуны изготовляют из стали. Состоит шатун из стержня двутаврового сечения, верхней неразъемной и нижней разъемной головок. В верхнюю головку запрессовывают втулку. Крышка нижней головки шатуна крепится к нему двумя болтами. Переставлять крышки с одного шатуна на другой нельзя, так как шатуны с крышками обрабатывают совместно.
Коленчатый вал (рис. 3) имеет коренных и шатунных шейки, противовесы, фланец для крепления маховика. Осевая фиксация коленчатых валов обеспечивается упорными подшипниками. Противовесы служат для разгрузки коренных подшипников от действия центробежных сил. Для подвода смазки от коренных шеек к шатунным просверлены каналы. На носке вала крепится шестерня привода распределительного вала.
На каждой из четырех шатунных шеек, расположенных под углом 90°, устанавливают по 2 шатуна: один — левого, а другой — правого ряда цилиндров, номера которых указаны на схеме. Вкладыши подшипников коренных шеек изготавливают из стальной ленты, внутреннюю (рабочую) поверхность которой покрывают тонким слоем антифрикционного сплава. У двигателей 3M3-53-11 и ЗИЛ-130 внутренняя поверхность вкладышей изготовлена из высокооловянистого алюминия. Вкладыши двигателя ЗИЛ-645 — трехслойные, с внутренней поверхностью из свинцовистой бронзы.
Вкладыши подшипников коренных шеек изготавливают из стальной ленты, внутреннюю (рабочую) поверхность которой покрывают тонким слоем антифрикционного сплава. У двигателей 3M3-53-11 и ЗИЛ-130 внутренняя поверхность вкладышей изготовлена из высокооловянистого алюминия. Вкладыши двигателя ЗИЛ-645 — трехслойные, с внутренней поверхностью из свинцовистой бронзы.
Рис. 3. Кривошипно-шатунный механизм: а — детали: б — схема расположения шатунов;
1 — болт; 2— шайба; 3 — шкив; 4 — пылеотражатель; 5 — кольцо манжеты; 6 — маслоотражатель; 7 — распределительная шестерня; 8— шестерня привода масляного насоса; 9 — коленчатый вал; 10 и 29 — вкладыши подшипников нижней головки шатуна; 11— шатунный болт; 12 — шатун; 13 — поршневой палец; 14 — стопорное кольцо; 15 — поршень; 16 — маслосъемное кольцо; 17 — компрессионные кольца; 18 и 26 — подшипники коленчатого вала; 19 и 24 — упорные подшипники коленчатого вала; 20 — болт крепления маховика; 21 — штифт; 22 — маховик; 23 — фланец крепления маховика; 25 — коренные шейки; 27—шатунная шейка; 28—противовесы; 30 — крышка шатуна; 31 — шайба; 32 — гайка
Маховик отливают из чугуна и напрессовывают на него стальной зубчатый венец для пуска двигателя стартером.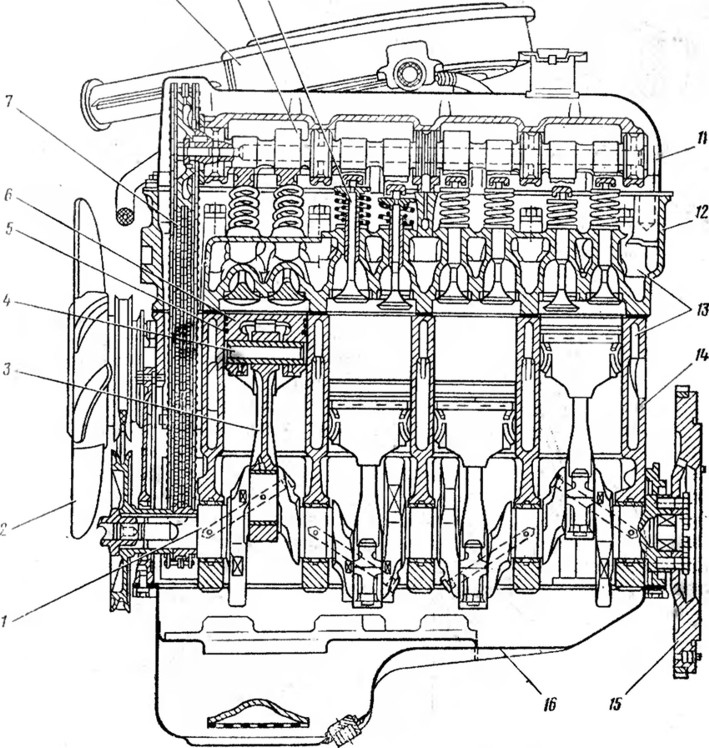 Маховик одновременно служит ведущим диском сцепления.
Маховик одновременно служит ведущим диском сцепления.
Крепление двигателя к раме. Двигатель 3M3-53-11 крепится к раме автомобиля в четырех точках на упругих опорах. Две передние опоры состоят из кронштейнов, привернутых к картеру двигателя, двух резиновых подушек и двух кронштейнов, укрепленных на раме. Задние опоры расположены под приливами картера сцепления на поперечине рамы и состоят из двух резиновых подушек, заключенных в металлические чашки и стянутых болтом.
Двигатели ЗИЛ-130 и -645 крепятся к раме автомобиля в трех точках. Передней опорой является кронштейн, установленный под крышкой распределительных шестерен и крепящийся через резиновые подушки к передней поперечине рамы. Задними опорами являются приливы на картере сцепления (у двигателя ЗИЛ-130) или кронштейны (у двигателя ЗИЛ-645), которые также через резиновые подушки крепятся к кронштейнам рамы.
Рис. 4. Крепление двигателей 3M3-53-1
—
Кривошипно-шатунный механизм служит для преобразования возвратно-поступательного движения поршней во вращательное движение коленчатого вала и передачи крутящего момента на трансмиссию. Он состоит из неподвижных (блока цилиндров, головки цилиндров, картера, поддона картера) и подвижных (поршней с пальцами и кольцами, шатунов, коленчатого вала с подшипниками, маховика) деталей.
Он состоит из неподвижных (блока цилиндров, головки цилиндров, картера, поддона картера) и подвижных (поршней с пальцами и кольцами, шатунов, коленчатого вала с подшипниками, маховика) деталей.
Неподвижные детали. Блок цилиндров является базовой деталью двигателя и представляет собой общую отливку с картером. В верхней части блока имеются отверстия для установки гильз цилиндров. Цилиндры могут располагаться в блоке в один ряд вертикально (двигатель ГАЗ-24) или в два ряда V-образно под углом 90° (двигатели 3M3-53, ЗИЛ-130, КамАЗ). V-образное расположение цилиндров позволяет на одной шатунной шейке коленчатого вала укреплять по два шатуна. Блоки цилиндров двигателей отливают из серого чугуна (ЗИЛ-130, КамАЗ) или алюминиевого сплава (3M3-53, ГАЗ-24).
Рис. 5. Блок цилиндров и схематический разрез V-образного двигателя
Гильзы цилиндров, устанавливаемые в изучаемых двигателях,— мокрого типа (обмываемые водой), изготовляются из чугуна с кислотоупорными чугунными вставками в верхней части для снижения износа. Уплотнение гильз в нижней части осуществляется двумя резиновыми (ЗИЛ-130) или медными (ГАЗ-53, ГАЗ-24) кольцами, а в верхней части — прокладкой головки цилиндров.
Уплотнение гильз в нижней части осуществляется двумя резиновыми (ЗИЛ-130) или медными (ГАЗ-53, ГАЗ-24) кольцами, а в верхней части — прокладкой головки цилиндров.
Нижняя часть отливки блока цилиндров является картером, в котором имеются постели для установки коленчатого вала и отверстия — для распределительного.
Головки цилиндров отливают из алюминиевого сплава. Они крепятся с помощью болтов и шпилек к блоку цилиндров. Для уплотнения между головкой и блоком цилиндров ставят сталеасбестовую прокладку. Как блок цилиндров, так и его головки имеют двойные стенки, образующие рубашку, в которой циркулирует охлаждающая жидкость.
В рядных двигателях (ГАЗ-24) головка цилиндров одна, а у V-образных (ЗИЛ-130 и 3M3-53) —две, по одной взаимозаменяемой головке на каждый ряд цилиндров. В двигателе КамАЗ-740 каждый цилиндр имеет свою головку.
Подвижные детали. Поршни служат для восприятия при рабочем ходе силы давления газов и ее передачи через поршневой палец и шатун на коленчатый вал. Поршень имеет головку, две бобышки и направляющую часть (юбку). Верхняя часть головки поршня называется днищем. Вследствие неодинакового нагрева головки и юбки поршня (головка больше нагревается, а поэтому и больше расширяется) диаметр головки выполняют меньше диаметра юбки. С внешней стороны головки поршня делают кольцевые канавки для установки поршневых колец.
Поршень имеет головку, две бобышки и направляющую часть (юбку). Верхняя часть головки поршня называется днищем. Вследствие неодинакового нагрева головки и юбки поршня (головка больше нагревается, а поэтому и больше расширяется) диаметр головки выполняют меньше диаметра юбки. С внешней стороны головки поршня делают кольцевые канавки для установки поршневых колец.
Поршни отливают из алюминиевого сплава. Направляющая часть поршней (юбка) разрезная. Она имеет овальную форму с увеличенным диаметром в плоскости, перпендикулярной оси поршневого пальца. При сборке двигателя поршень разрезом юбки устанавливают в левую (по ходу автомобиля) сторону.
В головки поршней двигателей ЗИЛ-130 и КамАЗ залита чугунная вставка, в которой проточена канавка для установки верхнего компрессионного кольца.
Поршневые кольца служат для уменьшения утечки газов из цилиндра в картер (компрессионные), а также для удаления излишнего масла со стенок цилиндра (маслосъемные). Кольца изготовляются из серого чугуна (для маслосъемных колец иногда применяется сталь) и имеют разрезы (замки). На поршнях устанавливается по два (двигатели ГАЗ-24, 3M3-53, КамАЗ-740) или три (ЗИЛ-130) компрессионых кольца и одно маслосъемное. Маслосъемное кольцо двигателей ЗИЛ-130 и ГАЗ-24 состоит из двух стальных колец и двух расширителей — осевого ( и радиального. На двигателе КамАЗ-740 маслосъемное кольцо с одним расширителем — радиальным.
На поршнях устанавливается по два (двигатели ГАЗ-24, 3M3-53, КамАЗ-740) или три (ЗИЛ-130) компрессионых кольца и одно маслосъемное. Маслосъемное кольцо двигателей ЗИЛ-130 и ГАЗ-24 состоит из двух стальных колец и двух расширителей — осевого ( и радиального. На двигателе КамАЗ-740 маслосъемное кольцо с одним расширителем — радиальным.
Рис. 6. Детали шатунно-поршневой группы:
1 и 5— маслосъемное и компрессионные кольца, 2 и 3 — осевой и радиальный расширители, 4 — чугунная вставка, 6 — стопорное кольцо, 7 — поршневый палец, 8 — поршень, 9 — шатун, 10 — втулка, 11 — метка, 12— шатунные вкладыши, 13— крышка нижней головки шатуна
Поршневой палец служит для подвижного соединения поршня с шатуном. Его изготовляют пустотелым из стали с поверхностной закалкой токами высокой частоты и закрепляют в бобышках поршня с помощью двух стопорных колец. Этот способ крепления позволяет поршневому пальцу поворачиваться в головке шатуна и в бобышках поршня (такой палец называется плавающим).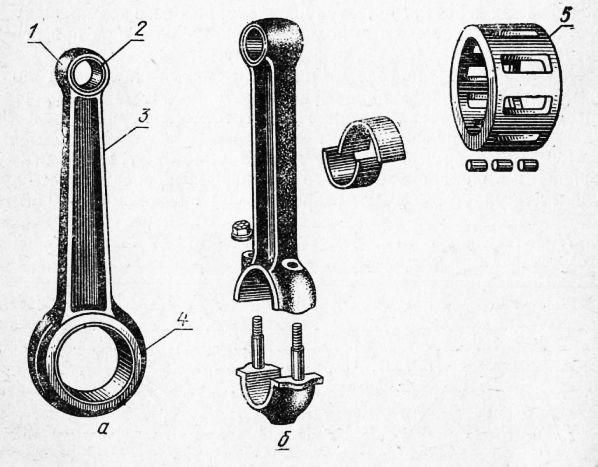
Шатун служит для передачи силы давления газов от поршня на коленчатый вал при рабочем ходе, а при вспомогательных тактах — от коленчатого вала к поршню. Изготовляется шатун из стали и состоит из стержня двутаврового сечения, верхней неразъемной и нижней разъемной головок. В верхнюю головку запрессовывают бронзовую втулку, а в нижнюю устанавливают шатунные вкладыши.
У V-образных двигателей на одной шатунной шейке устанавливают два шатуна так, чтобы у правого ряда цилиндров номер на шатуне был обращен назад, а у левого — вперед, т. е. должен совпадать с надписью на поршне «вперед».
Коленчатый вал воспринимает силу давления газов от поршней через шатуны и передает крутящий момент на трасмис-сию автомобиля. Он имеет коренные и шатунные шейки, щеки, противовесы, фланец для крепления маховика и носок с внутренней резьбой для ввертывания храповика. Изготовляется коленчатый вал из стали (ЗИЛ-130, КамАЗ-740) или высокопрочного чугуна (3M3-53, ГАЗ-24).
Рис. 7. Коленчатые валы:
7. Коленчатые валы:
а — восьмицилиндрового V-образного двигателя, б — четырехцилиндрового рядного двигателя; 1 и 3— коренные и шатунные шейки, 2 — противовесы, 4 — пробка, 5 — грязеуловитель, 6 — маховик с зубчатым венцом
Противовесы служат для разгрузки коренных подшипников от вредного действия центробежных сил. Для подвода смазки от коренных шеек к шатунным просверлены каналы. Коренными шейками коленчатый вал устанавливается в постели картера и крепится крышками.
У коленчатых валов 8-цилиндровых V-образных двигателей на каждой из четырех шатунных шеек, расположенных под углом 90 устанавливают по два шатуна: один — левого, а другой — правого ряда цилиндров, номера которых указаны на схеме. У двигателей ГАЗ-24 на шатунных шейках, расположенных попарно под углом 180 устанавливают по одному шатуну.
Вкладыши шатунных и коренных шеек коленчатого вала изготовляют из стальной ленты, внутреннюю (рабочую) поверхность которой покрывают тонким слоем антифрикционного сплава. У двигателей 3M3-53, ЗИЛ-130 и ГАЗ-24 рабочая поверхность вкладышей — из высокооловянистого алюминия. Вкладыши шатунов двигателя КамАЗ-740 — трехслойные, с рабочим слоем из свинцовистой бронзы.
У двигателей 3M3-53, ЗИЛ-130 и ГАЗ-24 рабочая поверхность вкладышей — из высокооловянистого алюминия. Вкладыши шатунов двигателя КамАЗ-740 — трехслойные, с рабочим слоем из свинцовистой бронзы.
Маховик отливают из чугуна. Он служит для вывода поршней из мертвых точек, осуществления вспомогательных тактов, равномерного вращения коленчатого вала, а также пуска двигателя стартером, для чего на обод маховика напрессован стальной зубчатый венец. Кроме того, маховик служит ведущим диском сцепления.
Кривошипно-шатунный механизм (КШМ) двигателя
Кривошипно-шатунным называется такой механизм, который осуществляет рабочий процесс силового агрегата. Главное предназначение кривошипно-шатунного механизма – преобразование возвратно-поступательного перемещения всех поршней во вращательное движение коленвала.
Кривошипно-шатунный механизм определяет тип силового агрегата по расположению цилиндров. В автомобильных двигателях ( см. устройство двигателя автомобиля ) используются различные варианты кривошипно-шатунных механизмов:
- Однорядные кривошипно-шатунные механизмы.
 Перемещение поршней может быть вертикальным либо под углом. Используются в рядных двигателях;
Перемещение поршней может быть вертикальным либо под углом. Используются в рядных двигателях; - Двухрядные кривошипно-шатунные механизмы. Перемещение поршней только под углом. Используются в V-образных двигателях;
- Одно- и двухрядные кривошипно-шатунные механизмы. Перемещение поршней горизонтальное. Применяются в случае, если габаритные размеры мотора по высоте ограничены.
 Перемещение поршней может быть вертикальным либо под углом. Используются в рядных двигателях;
Перемещение поршней может быть вертикальным либо под углом. Используются в рядных двигателях;
Составляющие кривошипно-шатунного механизма подразделяются на
- Подвижные – поршни, пальцы и поршневые кольца, маховик и коленчатый вал, шатуны;
- Неподвижные – цилиндры, головка блока цилиндров (ГБЦ), блок цилиндров, картер, прокладка ГБЦ и поддон.
Кроме этого к кривошипно-шатунному механизму относятся разнообразные крепежные элементы, а также шатунные и крепежные подшипники.
Устройство КШМ
При рассмотрении устройства КШМ необходимо выделить основные элементы его конструкции: коленвал, коренная шейка, шатунная шейка, шатуны, вкладыши, поршневые кольца (маслосъемные и компрессионные), пальцы и поршни ( см. работа поршня ).
работа поршня ).
Сложная конструкция вала обеспечивает получение и передачу энергии от поршня с шатуном на последующие узлы и агрегаты. Сам вал собран из элементов, называемых коленами. Колена соединены цилиндрами, расположенными со смещением относительно основной центральной оси в определенном порядке. На техническом языке название этих цилиндров — шейки. Те шейки, что смещены, крепятся к шатунам, соответственно и название — шатунные. Шейки, расположенные вдоль основной оси — коренные. За счет расположения шатунных шеек со смещением относительно центральной оси образуется рычаг. Поршень, опускаясь вниз, через шатун заставляет проворачиваться коленчатый вал.
Варианты конструкций вала представлены на следующем рисунке.
В зависимости от числа цилиндров, а также конструктивных решений ДВС по расположению цилиндров бывает однорядный или двухрядный.
В первом случае (1) цилиндры расположены в одной плоскости относительно коленчатого вала. Если конкретнее, то все они на двигателе расположены вертикально, по центральной оси, а сам вал находится внизу. В двухрядном двигателе (поз. 2 и 3), цилиндры размещены в два ряда под углом друг к другу 60, 90 или 180°, то есть противоположно друг к другу. Возникает вопрос: «А зачем?». Обратимся к физике. Энергия от сгорания рабочей смеси очень большая и значительная доля ее погашения приходится на коренные шейки коленчатого вала, которые хоть и железные, но имеют определенный запас прочности и ресурса. В четырехцилиндровом двигателе автомобиля этот вопрос решается просто: 4 цилиндра — 4 такта рабочего цикла по очереди. В итоге нагрузка на коленвал равномерно распределяется на всех участках. В тех ДВС, где цилиндров больше, или требуется большая мощность, их размещают в «V»-образном виде, дополнительно смягчая нагрузку на коленчатый вал. Таким образом, энергия гасится не вертикально, а под углом, что значительно смягчает нагрузку на коленчатый вал.
В двухрядном двигателе (поз. 2 и 3), цилиндры размещены в два ряда под углом друг к другу 60, 90 или 180°, то есть противоположно друг к другу. Возникает вопрос: «А зачем?». Обратимся к физике. Энергия от сгорания рабочей смеси очень большая и значительная доля ее погашения приходится на коренные шейки коленчатого вала, которые хоть и железные, но имеют определенный запас прочности и ресурса. В четырехцилиндровом двигателе автомобиля этот вопрос решается просто: 4 цилиндра — 4 такта рабочего цикла по очереди. В итоге нагрузка на коленвал равномерно распределяется на всех участках. В тех ДВС, где цилиндров больше, или требуется большая мощность, их размещают в «V»-образном виде, дополнительно смягчая нагрузку на коленчатый вал. Таким образом, энергия гасится не вертикально, а под углом, что значительно смягчает нагрузку на коленчатый вал.
После краткого рассмотрения устройства КШМ необходимо также уделить внимание коленчатому валу. Говоря о нагрузке на коленчатый вал, стоит остановиться на подшипниках шеек коленвала. Рассмотрим соединение шатуна с коленчатым валом двигателя.
Те перегрузки, что испытывает вал, не под силу шариковым подшипникам. Здесь и огромное давление, высокая температура, труднодоступность смазки трущихся элементов и высокая скорость вращения. Поэтому именно для шеек применяются подшипники скольжения, которые обеспечивают работу всего двигателя. Вращение коленчатого вала происходит на вкладышах. Вкладыши делятся на коренные и шатунные. Из коренных вкладышей образуется кольцо вокруг коренных шеек вала. Из шатунных вкладышей по аналогии — вокруг шатунных шеек. Для уменьшения трения скользящие поверхности подшипников и шеек смазываются маслом, подаваемым через отверстия в коленвале под высоким давлением.
Значительную работу по обеспечению равномерности и плавности работы двигателя автомобиля выполняет маховик, о котором упоминалось ранее. Это зубчатое колесо на конце вала сглаживает перебои во вращении коленвала и обеспечивает совершение всех «холостых» тактов рабочего цикла каждого цилиндра ДВС.
Теперь обратимся к конструкции поршня двигателя.
Сам поршень представляет собой перевернутую вверх дном банку. Это самое дно имеет плавно вогнутую форму, что улучшает равномерность нагрузки на поршень при совершении рабочего хода и образование рабочей смеси. Поршень крепится к шатуну через палец с подшипником, обеспечивающим колебательные движения шатуна. Стенки поршня носят название «юбка». Она имеет, на первый взгляд, округлую форму, но есть едва заметные отличия.
Первое — это утолщение стенок юбки в направлениях движения шатуна. Поршень с шатуном через палец крепления давят поочередно друг на друга в одной плоскости. В той, которой собственно и двигается шатун относительно поршня. Следовательно, стенки поршня испытывают там большую нагрузку и давление, поэтому и сделаны толще.
Второе — это сужение диаметра юбки к низу. Сделано это для недопущения заклинивания поршня в цилиндре при нагреве и обеспечения смазки трущихся поверхностей юбки поршня и стенки цилиндра. Сами стенки цилиндра настолько гладко и ювелирно выполнены, что сравнимы с поверхностью зеркала. Но тогда остается зазор, который существенно влияет на герметичность цилиндра при такте сжатия и рабочего хода.
Для решения этих противоположных по смыслу проблем, на юбке поршня предусмотрены кольца. Именно через них сам поршень соприкасается со стенками цилиндра. На каждом поршне имеется два типа колец — компрессионные и маслосъемные. Компрессионные кольца обеспечивают герметичность за счет давления сгораемых газов.
Маслосъемные кольца говорят сами за себя. Остатков масла, поступающего для смягчения трения в связке поршень-цилиндр, не должно оставаться при процессе горения топливно-воздушной смеси. Иначе возможна детонация, засорение свечей или форсунок остатками тяжелых фракций нефтяных продуктов, присутствующих в масле. А все это нарушает весь рабочий цикл. Поэтому масло, впрыскиваемое на стенки цилиндра при «холостых» тактах, снимается маслосъемными кольцами при рабочем ходе поршня.
Все цилиндры двигателя размещены в едином корпусе, который называется блоком цилиндров двигателя. Его конструкция довольно сложна. В нем многочисленное количество каналов для всех систем двигателя, а также он выполняет несущую основу для многих деталей и компонентов для силовой установки в целом.
Работа КШМ
Рассмотрим схему работы КШМ.
Поршень располагается на максимально удаленном расстоянии от коленчатого вала. Шатун и кривошип выстроены в одной линии. В тот момент, когда в цилиндр проникает горючее, происходит процесс возгорания. Продукты горения, в частности, расширяющие газы, способствуют перемещению поршня к коленчатому валу. Одновременно с этим перемещается также и шатун, нижняя головка которого проворачивает коленчатый вал на 180°. Затем шатун и его нижняя головка перемещаются и проворачиваются обратно, занимая исходную позицию. Поршень тоже возвращается в свое первоначальное положение. Такой процесс происходит в круговой последовательности.
По описанию работы КШМ видно, что кривошипно-шатунный механизм является главным механизмом мотора, от работы которого полностью зависит исправность транспортного средства. Таким образом, этот узел необходимо постоянно контролировать, и при любом подозрении на неисправность, следует вмешиваться и устранять ее незамедлительно, так как результатом различных поломок кривошипно-шатунного механизма может оказаться полная поломка силового агрегата, ремонт которого очень дорогостоящий.
Неисправности КШМ
К основным признакам неисправности КШМ относятся следующие:
- Падение мощностных показателей двигателя;
- Появление посторонних шумов и стуков;
- Увеличенный расход масла;
- Возникновение дыма в отработанных газах;
- Перерасход топлива.
Шумы и стуки в моторе возникают из-за износа его главных составляющих и возникновение между сопряженными составляющими увеличенного зазора. При износе цилиндра и поршня, а также при возникновении большего зазора между ними появляется металлический стук, который удается отчетливо услышать при работе холодного мотора. Резкий и звонкий металлический стук при любых режимах работы мотора говорит об увеличенном зазоре между втулкой, верхней головки шатуна и поршневым пальцем. Усиление стука и шума при быстром увеличении числа оборотов коленвала свидетельствует об износе вкладышей шатунных или коренных подшипников, причем более глухой стук говорит об износе вкладышей коренных подшипников. Если износ вкладышей достаточно большой, то, вероятнее всего, давление масла резко понизится. В таком случае эксплуатировать мотор не рекомендуется.
Резкий и звонкий металлический стук при любых режимах работы мотора говорит об увеличенном зазоре между втулкой, верхней головки шатуна и поршневым пальцем. Усиление стука и шума при быстром увеличении числа оборотов коленвала свидетельствует об износе вкладышей шатунных или коренных подшипников, причем более глухой стук говорит об износе вкладышей коренных подшипников. Если износ вкладышей достаточно большой, то, вероятнее всего, давление масла резко понизится. В таком случае эксплуатировать мотор не рекомендуется.
Падение мощности мотора возникает при износе цилиндров и поршней, износе или залегании в канавах поршневых колец, некачественной затяжке головки цилиндров. Подобные неисправности способствуют падению компрессии в цилиндре. Чтобы проверить компрессию, существует специальный прибор – компрессометр, измерения необходимо выполнять на теплом моторе. Для этого необходимо выкрутить все свечи, после чего установить наконечник компрессометра на место одной из них. При абсолютно открытом дросселе проворачивают мотор стартером в течение трех секунд. Подобным методом последовательно выполняют проверку всех остальных цилиндров. Значение компрессии должно быть в рамках, указанных в технических характеристиках мотора. Разница компрессии между цилиндрами не должна быть не выше 1 кг/см2.
При абсолютно открытом дросселе проворачивают мотор стартером в течение трех секунд. Подобным методом последовательно выполняют проверку всех остальных цилиндров. Значение компрессии должно быть в рамках, указанных в технических характеристиках мотора. Разница компрессии между цилиндрами не должна быть не выше 1 кг/см2.
Увеличенное потребление масла, перерасход топлива, образование дыма в отработанных газах обычно происходит при износе цилиндров и колец или при залегании поршневых колец. Вопрос с залеганием кольца можно решить без разборки мотора, залив в цилиндр через специальные отверстия для свечи соответствующую жидкость.
Отложение нагара на камерах сгорания и днищах поршней уменьшает теплопроводность, что способствует перегреву мотора, повышению топливного расхода и падению мощности.
Трещины на стенках рубашки охлаждения блока, а также головки блока цилиндров могут образоваться в связи с замерзанием охлаждающей жидкости, в результате перегрева мотора, в результате заполнения охлаждающей системы ( см. система охлаждения двигателя) горячего мотора холодной охлаждающей жидкостью. Трещины на блоке цилиндров могут пропускать охлаждающую жидкость в цилиндры. В связи с этим выхлопные газы приобретают белый цвет.
система охлаждения двигателя) горячего мотора холодной охлаждающей жидкостью. Трещины на блоке цилиндров могут пропускать охлаждающую жидкость в цилиндры. В связи с этим выхлопные газы приобретают белый цвет.
Выше рассмотрены основные неисправности КШМ.
Крепежные работы
Чтобы предотвратить пропуск охлаждающей жидкости и газов через прокладку головки цилиндров, следует периодически контролировать крепление головки ключом со специальной динамометрической рукояткой с определенной последовательностью и усилием. Положение затяжки и последовательность затягивания гаек обозначают автомобильные заводы.
Головку цилиндров из чугуна прикрепляют, когда мотор находится в нагретом положении, алюминиевую голову, наоборот, на холодный двигатель. Необходимость затягивания крепления алюминиевых головок в холодном состоянии объясняется разным коэффициентом линейного расширения материала шпилек и болтов и материала головки. В связи с этим подтягивание гаек на сильно разогретом моторе не обеспечивает после остывания мотора должной плотности прилегания к блоку головки цилиндров.
Затяжку болтов прикрепления поддона картера для предотвращения деформации картера, нарушения при герметичности также проверяют с соблюдением последовательности, то есть поочередным затягиванием диаметрально противоположных болтов.
Проверка состояния кривошипно-шатунного механизма
Техническое состояние кривошипно-шатунных механизмов определяется:
- По компрессии (изменению давления) в цилиндрах мотора в конце хода сжатия;
- По расходу масла в процессе эксплуатации и уменьшению давления в системе смазки двигателя;
- По разрежению в трубопроводе впуска;
- По утечке газов из цилиндров;
- По объему газов, проникающих в картер мотора;
- По наличию стуков в моторе.
Расход масла в малоизношенном моторе незначителен и может равняться 0,1-0,25 литра на 100 км пути. При общем значительном износе мотора расход масла может составлять 1 литр на 100 км и больше, что, как правило, сопровождается обильным дымом.
Давление в масляной системе мотора должно соответствовать пределам, установленным для данного типа мотора и используемого сорта масла. Уменьшение давления масла на незначительных оборотах коленвала прогретого силового агрегата указывает на неисправность в смазочной системе или на присутствие недопустимых износов подшипников мотора. Падение масляного давления по манометру до 0 говорит о неисправности редукционного клапана или манометра.
Компрессия является показателем герметичности цилиндров мотора и характеризует состояние клапанов, цилиндров и поршней. Герметичность цилиндров можно установить с помощью компрессометра. Изменение давления (компрессию) проверяют после предварительного разогрева мотора до 80°C при выкрученных свечах. Установив наконечник компрессометра в отверстия для свечей, проворачивают стартером коленвал мотора на 10 – 14 оборотов и фиксируют показания компрессометра. Проверка выполняется по 3 раза для каждого цилиндра. Если показания компрессии на 30 – 40% ниже установленной нормы, это говорит о неисправностях (пригорание поршневых колец или их поломка, повреждение прокладки головки цилиндров или негерметичность клапанов).
Если показания компрессии на 30 – 40% ниже установленной нормы, это говорит о неисправностях (пригорание поршневых колец или их поломка, повреждение прокладки головки цилиндров или негерметичность клапанов).
Разрежение в трубопроводе впуска мотора измеряют вакуумметром. Значение разрежения у работающего на установившемся режиме моторов может меняться от изношенности цилиндро–поршневой группы, а также от состояния элементов газораспределения ( см. газораспределительный механизм ), регулировки карбюратора ( см. устройство карбюратора ) и установки зажигания. Таким образом, такой метод проверки является общим и не дает возможности выделить конкретную неисправность по одному показателю.
Объем газов, проникающих в картер мотора, изменяется из–за неплотности сопряжений цилиндр + поршень + поршневое кольцо, увеличивающейся по степени изнашивания данных деталей. Количество проникающих газов измеряют при полной нагрузке мотора.
Обслуживание КШМ
Обслуживание КШМ заключается в постоянном контроле креплений и подтягивании ослабевших гаек и болтов картера, а также головки блока цилиндров. Болты крепления головки блока и гайки шпилек следует подтягивать на разогретом моторе в определенной последовательности.
Двигатель следует содержать в чистоте, каждый день протирать или промывать кисточкой, смоченной в керосине, после этого протирать сухой ветошью. Необходимо помнить, что грязь, пропитанная маслом и бензином, представляет серьезную опасность для возгорания при наличии каких–либо неисправностей в системе зажигания двигателя исистеме питания двигателя, также способствует образованию коррозии.
Периодически нужно снимать головку блока цилиндров и удалять весь нагар, образовавшийся в камерах сгорания.
Нагар плохо проводит тепло. При определенной величине слоя нагара на клапанах и поршнях отвод тепла в охлаждающую жидкость резко ухудшается, происходит перегрев мотора и уменьшение его мощностных показателей. В связи с этим, возникает потребность в более частом включении низких передач и потребность в топливе возрастает. Интенсивность формирования нагара полностью зависит от вида и качества используемого для мотора масла и топлива. Самое интенсивное нагарообразование выполняется при использовании низкооктанового бензина с достаточно высокой температурой конца выкипания. Стуки, возникающие в таком случае при работе двигателя, имеют детонационный характер и в конечном итоге приводят к уменьшению срока работоспособности двигателя.
Нагар необходимо удалять с камер сгорания, со стержней и головок клапанов, из впускных каналов блока цилиндров, с днищ поршней. Нагар рекомендуется удалять с помощью проволочных щеток или металлических скребков. Предварительно нагар размягчается керосином.
При последующей сборке мотора прокладку головки блока необходимо устанавливать таким образом, чтобы сторона прокладки, на которой наблюдается сплошная окантовка перемычек между краешками отверстий для камер сгорания, была направлена в сторону головки блока.
Стоит учесть, что во время движения машины за городом в течении 60–ти минут со скоростью 65–80 км/ч происходит выжигание (очистка) цилиндров от нагара.
При должном регулярном обслуживании КШМ его срок службы продлится на долгие годы.
27. Объясните для чего применяется кривошипно-шатунный механизм и перечислите его основные элементы
Назначение КШМ.
Кривошипно-шатунный механизм преобразует
прямолинейное возвратно-поступательное
движение поршней, воспринимающих
давление газов, во вращательное движение
коленчатого вала.
Принцип его действия заключается
в том, что поршень под действием сжатых
газов совершает возвратно-поступательное
движение, которое при помощи шатуна и
кривошипа преобразуется во вращательное
движение вала. Вал совершает один полный
оборот за два хода поршня: от верхнего
крайнего положения до нижнего под
действием сжатых газов и от нижнего
крайнего положения до верхнего под
давлением сил инерции.
Типы и виды КШМ
а) Несмещенный (центральный) кшм, у
которого ось цилиндра пересекается с
осью коленчатого вала.
б) Смещенный кшм, у которого ось цилиндра
смещена относительно оси коленчатого
вала на величину а;
в) V-образный кшм (в том числе с прицепным
шатуном), у которого два шатуна, работающие
на левый и правый цилиндры, размещены
на одном кривошипе коленчатого вала.
3. Состав КШМ (Детали)
Детали кривошипно-шатунного механизма
можно разделить на две группы: подвижные
и неподвижные. К первым относится поршень
с кольцами и поршневым пальцем, шатун,
коленчатый вал и маховик, ко вторым —
блок цилиндров, головка блока, крышка
блока распределительных зубчатых колес
и поддон (картер). В обе группы входят
также и крепежные детали.
32. Объясните правила запрессовки втулок, пальцев на ручных прессах.
Запрессовываемую деталь вдвигают в
другую или надвигают на нее (напрессовывают)
для получения тугой посадки (натяга).
При этом на сопрягаемых поверхностях
возникают силы, удерживающие детали от
взаимного перемещения. Эти силы тем
больше, чем больше величина натяга, т.
е. чем больше разница в размерах
сопрягаемых деталей.
Для
предотвращения заедания деталей при
запрессовывании и равномерного
распределения сил по их поверхностям
сопрягаемые детали предварительно
смазывают минеральным маслом.
Запрессовывать и выпрессовывать можно,
ударяя молотком (кувалдой) через
специальную оправку, выколотку или
наставку (медную, алюминиевую, бронзовую
или деревянную), съемниками, а также
ручными механическими или гидравлическими
прессами. Выпрессовывают и запрессовывают
Выпрессовывают и запрессовывают
втулки, гильзы, подшипники, шестерни, а
также правят погнутые валы на гидравлических
и механических прессах.
Мелкие прессовые работы (выпрессовывание
втулок, пальцев и т. д.) можно выполнять
на ручном верстачном реечном или винтовом
прессе.
33. Укажите разновидности механизмов преобразования движения и их назначение.
К механизмам преобразования движения
относятся винтовой, реечный,
кулачковый, кривошипно-шатунный, кулисный
и храповой. Все они преобразуют один
вид движения в другой — вращательное
движение в поступательное или, наоборот,
поступательное во вращательное.
Винтовой механизм (винтовая
передача) состоит из винта и гайки.
Винты, применяемые в механизмах
преобразования движения, называют
ходовыми. Как правило, винтовые механизмы
применяют для преобразования вращательного
движения в поступательное. Винтовые
механизмы применяют не только для
преобразования движения, но и для
передачи усилий в различных подъемниках,
домкратах, прессах и т. п.Реечный механизм (реечная
передача) — один из наиболее распространенных
в технике, применяемых для преобразования
вращательного движения в поступательное
и, наоборот, поступательного во
вращательное. Он состоит из шестерни
и прямолинейной зубчатой рейки. Рейка
— это развернутое зубчатое колесо,
начальный диаметр которого увеличен
до бесконечности. С помощью такого
механизма осуществляется продольное
перемещение суппорта токарного станка.
Примером применения механизма, в котором
вращательное движение шестерни
преобразуется в поступательное движение
рейки, является перемещение шпинделя
сверлильного станка.Кривошипно-шатунный механизм
используют для преобразования
возвратно-поступательного движения
во вращательное.Эксцентриковый механизм. Служит
для преобразования вращательного
движения в возвратно-поступательное.
Его применяют в станках, штамповочных
прессах. Представляет собой разновидность
кривошипно-шатунного механизма с
небольшим радиусом кривошипа.Кулачковый механизм применяется
для преобразования вращательного
движения в поступательное. Кулачковые
механизмы очень разнообразны по
устройству, конструкции и назначению.
Ведущим звеном кулачкового механизма
является кулачок, а ведомым — штанга,
рычаг, толкатель.Храповой механизм, состоящий
из храпового колеса и собачки, используют
для преобразования непрерывного
вращательного движения ведущего звена
в прерывистое движение ведомого звена.
 п.
п.
Кривошипно-шатунный механизм (КШМ). Маятник Капицы » РобоВики
Данная статья является вводной теорией к занятию по робототехнике «Кривошипно-шатунный механизм из Lego EV3″
В этой статье
- Первые КШМ
- КШМ в паровых машинах
- КШМ в двигателях внутреннего сгорания
- Маятник Капицы
Первые КШМ
Первые упоминания об использовании кривошипно-шатунного механизма можно отнести ко временам Древнего Рима (примерно III век н. э.). Машина для распиливания каменных блоков передавала вращение от водяного колеса с помощью зубчатой передачи на кривошипно-шатунный механизм, который преобразовывал вращательное движение в возвратно-поступательное движение полотна пилы. Также такие устройства могли использоваться на древних лесопилках.
э.). Машина для распиливания каменных блоков передавала вращение от водяного колеса с помощью зубчатой передачи на кривошипно-шатунный механизм, который преобразовывал вращательное движение в возвратно-поступательное движение полотна пилы. Также такие устройства могли использоваться на древних лесопилках.
Схема водяного древнеримского распиловочного станка с КШМ
Большого распространения такие машины не получили – деревянные части из-за большого количества трущихся деталей быстро изнашивались и требовали частого ремонта, а рабский труд был намного дешевле и не требовал большой квалификации рабочих.
В XVI веке кривошипно-шатунный механизм появился на деревянных самопрялках. Самопрялка – это ручной станок для прядения нити из шерсти, состоящий из двух катушек. В самопрялке для скручивания нити использовался принцип ременной передачи. Раньше большую катушку приходилось раскручивать рукой. К самопрялке добавили педаль. Нажимая ногой на педаль, работник смог раскручивать катушку без использования рук. Этот механизм упростил работу и позволил за то же время производить больше пряжи. В данном устройстве возвратно-поступательное движение педали передавалось через деревянный шатун на кривошип и преобразовывалось во вращательное движение большой катушки (шкива).
Этот механизм упростил работу и позволил за то же время производить больше пряжи. В данном устройстве возвратно-поступательное движение педали передавалось через деревянный шатун на кривошип и преобразовывалось во вращательное движение большой катушки (шкива).
Самопрялка с педалью и КШМ позволяла освободить руки и сделать работу более производительной
КШМ в паровых машинах
Начиная с начала XVIII века большую популярность среди изобретателей и ученых начинают получать паровые машины. Первый паровой двигатель для водяного насоса построил в 1705 году английский изобретатель Томас Ньюкомен для выкачивания воды из глубоких шахт.
Позднее устройство парового двигателя было усовершенствовано шотландским инженером и механиком Джеймсом Уаттом (1736-1819). Кстати, именно Джеймс Уатт ввел в оборот термин «лошадиная сила», а его именем назвали единицу мощности Ватт. Паровая машина Уатта получила сложную систему связанных тяг, а планетарная зубчатая передача преобразовывала возвратно-поступательное движение поршня во вращательное движение маховика (большого тяжелого колеса). Данная паровая машина стала универсальной, так как в отличие от машины Ньюкомена поршень имел рабочий ход в обе стороны. Машина Уатта получила широкое распространение на ткацких фабриках, в металлургии, при строительстве первых паровозов для железных дорог XVIII века.
Паровая машина Джеймса Уатта. Вместо кривошипа — сложная планетарная зубчатая передачаШотландский изобретатель Джеймс Уатт (James Watt)
Нужно сказать, что паровыми машинами занимались в те времена очень многие изобретатели. Так, в Российской Империи свою двухцилиндровую паровую машину изобрел инженер Иван Иванович Ползунов (1728-1766).
В XIX веке паровую машину Уатта упростили, заменив сложный планетарный механизм на кривошипно-шатунный механизм.
Паровая машина с кривошипно-шатунным механизмомСхема паровой машины с кривошипно-шатунным механизмом
Паровая машина с КШМ нашла широкое применение при строительстве первых автомобилей на паровой тяге и паровозов, перевозящих грузы по железной дороге.
Паровоз
КШМ в двигателях внутреннего сгорания
До этого мы рассматривали использование кривошипно-шатунного механизма в паровых двигателях. В паровом двигателе топливо сгорает в печи (вне цилиндра) и нагревает водяной котел, и уже водяной пар в цилиндре толкает поршень.
В двигателе внутреннего сгорания топливная смесь (воздух + газ, или воздух + бензин и т.д.) поджигается внутри цилиндра и продукты горения толкают поршень. Сокращенно такие двигатели называют ДВС.
Первый одноцилиндровый ДВС на газовом топливе построил в 1860 году в Париже французский изобретатель Жан Ленуар.
Двигатель внутреннего сгорания Жана Ленуара (внешне очень похож на паровую машину)
Однако широкое применение двигатели внутреннего сгорания нашли в конце XIX века после получения керосина и бензина из нефти. Появление жидкого топлива позволило создать экономичные двигатели небольшой массы, которые можно было использовать для привода транспортных машин.
Появление жидкого топлива позволило создать экономичные двигатели небольшой массы, которые можно было использовать для привода транспортных машин.
В 1881-1885 гг. российский изобретатель Огнеслав Костович сконструировал и построил в России восьмицилиндровый двигатель мощностью 59 кВт.
Двигатель внутреннего сгорания Огнеслава Костовича
В 1897 г. немецким инженером Рудольфом Дизелем был спроектирован и построен первый двигатель с воспламенением от сжатия. Это был компрессорный двигатель, работающий на керосине, впрыскиваемом в цилиндр при помощи сжатого воздуха.
Рудольф Дизель и его двигатель внутреннего сгорания
Все эти ДВС имели схожие черты и использовали кривошипно-шатунный механизм для преобразования возвратно-поступательного движения поршня во вращательное движение коленвала.
Давайте посмотрим на схему устройства современного двигателя внутреннего сгорания.
Схема кривошипно-шатунного механизма в двигателе внутреннего сгорания
Общие определения:
Поршень совершает возвратно-поступательное движение вдоль цилиндра – он ходит вверх и вниз.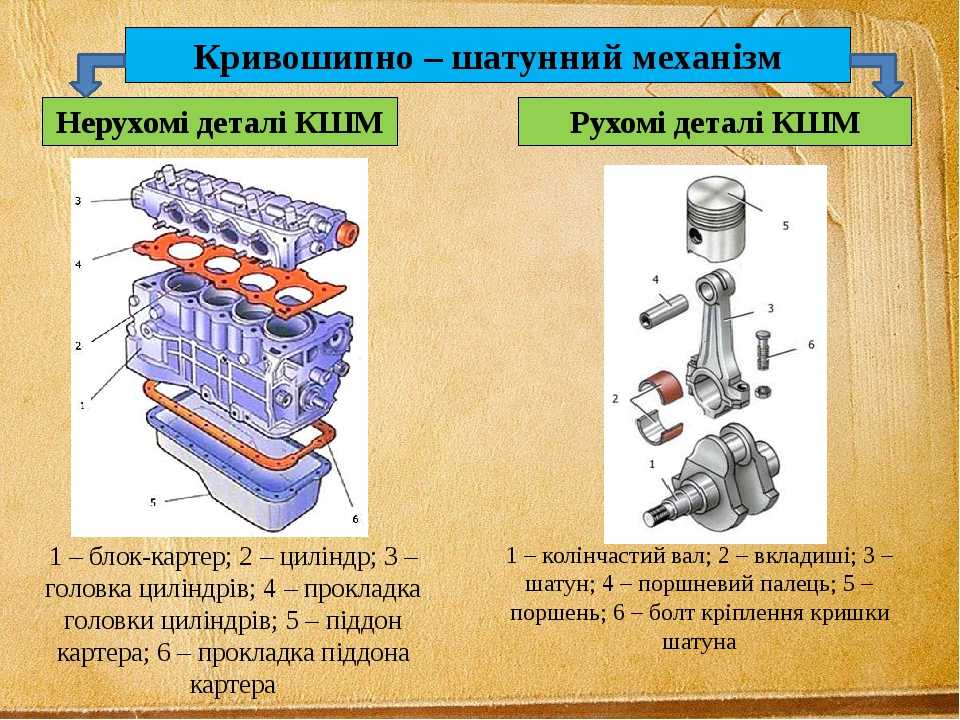
Шатун – деталь, связывающая кривошип и поршень.
Кривошип – условная деталь, которая связывает шатун с коленвалом.
Противовес снижает вибрации при вращении коленвала.
Блок цилиндров – корпус, в котором находятся цилиндры двигателя.
Поршневой палец – цилиндрическая деталь, ось вращения шатуна относительно поршня.
Коленвал (коленчатый вал) – ось вращения ступенчатой формы.
Верхняя мертвая точка – крайнее верхнее положение поршня, где меняется направление его движения.
Нижняя мертвая точка — крайнее нижнее положение поршня, где меняется направление его движения.
Ход поршня — расстояние между крайними положениями поршня. Равно удвоенному радиусу кривошипа.
Блок цилиндров, поршень с шатуном и коленвал
Видео:
- Старинная русская прялка с кривошипно-шатунным механизмом
- Паровая машина. Джеймс Уатт
- Принцип работы противовесов
 Джеймс Уатт
Джеймс Уатт Литература:
- КИНЕМАТИКА И ДИНАМИКА КРИВОШИПНОШАТУННОГО МЕХАНИЗМА ПОРШНЕВЫХ ДВИГАТЕЛЕЙ
Обычный маятник, если перевернуть его кверху ногами, неустойчив. Для него крайне трудно найти верхнюю точку равновесия. Но если совершать быстрые вертикальные возвратно-поступательные колебания, то положение такого маятника становится устойчивым.
Петр Леонидович Капица
Советский академик и нобелевский лауреат по физике Петр Леонидович Капица (1894 — 1984) использовал модель маятника с вибрирующим подвесом для построения новой теории, которая описывала эффекты стабилизации тел или частиц. Работа Капицы по стабилизации маятника была опубликована в 1951 году, а сама модель получила название «маятник Капицы». Более того, было открыто новое направление в физике — вибрационная механика. Данная модель позволила наглядно показать возможности высокочастотной электромагнитной стабилизации пучка заряженных частиц в ускорителях.
Владимир Игоревич Арнольд
Другой советский математик и академик Владимир Игоревич Арнольд (1937-2010), который был заместителем Капицы, вспоминал его слова:
«Он (Капица — примечание) сказал: «Вот смотрите — когда придумывается какая-то физическая теория, то прежде всего надо сделать маленький какой-нибудь прибор, на котором его наглядно можно было-бы продемонстрировать кому угодно. Например, Будкер и Векслер хотят делать ускорители на очень сложной системе. Но я посмотрел, что уравнения, которые говорят об устойчивости этого пучка, означают, что если маятник перевернут кверху ногами, он обычно неустойчив, падает. Но если точка подвеса совершает быстрые вертикальные колебания, то он становится устойчивым. В то время как ускоритель стоит много миллионов, а этот маятник можно очень легко сделать. Я его сделал на базе швейной электрической машинки, он вот здесь стоит». Он нас отвел в соседнюю комнату и показал этот стоящий вертикально маятник на базе швейной машинки».
Демонстрация динамической стабилизации перевернутого маятника с помощью электробритвы
У математика Арнольда не было своей швейной машинки, и он огорчился. Но у него была электробритва «Нева», из которой и был собран перевернутый маятник. К сожалению, в первой конструкции маятник падал. Тогда Арнольд вывел формулу и увидел, что длина маятника не должна быть больше 12 сантиметров. Известный математик укоротил подвес до 11 сантиметров и все получилось.
Но у него была электробритва «Нева», из которой и был собран перевернутый маятник. К сожалению, в первой конструкции маятник падал. Тогда Арнольд вывел формулу и увидел, что длина маятника не должна быть больше 12 сантиметров. Известный математик укоротил подвес до 11 сантиметров и все получилось.
Давайте посмотрим, какие силы действуют на «маятник Капицы». После прохождения верхней мертвой точки подвес маятника начинает тянуть грузик вниз. После прохождения нижней мертвой точки подвес толкает грузик вверх. Так как углы вежду векторами сил в верхней и нижней точке разные, то сумма их векторов дает силу, направленную к оси вертикальных колебаний маятника. Если эта сила больше силы тяжести, то верхнее положение маятника становится устойчивым.
А эта формула описывает взаимосвязь частоты вибраций подвеса, амплитуды колебаний и длины жесткого подвеса.
Видео:
- GetAClass. Маятник Капицы
- Маятник Капицы: диалог академика Арнольда и Капицы, вывод формулы
Как работает кривошипно-шатунный механизм велосипеда?
содержание
Система шатун-кривошип состоит из вращающегося элемента, называемого кривошипом, соединенного с жестким стержнем, называемым шатуном, так что, когда кривошип вращается, шатун вынужден последовательно двигаться вперед и назад. Этот механизм преобразует круговое движение в альтернативное прямолинейное движение.
Как используется кривошип?
В механике, кривошип Это элемент машины, который передает движение от одного элемента к другому механизма, поворачивая один конец на оси и вращая другой как рычаг второго порядка. … Этот процесс называется «движение».
Какими характеристиками обладает кривошипно-шатунный механизм?
El механизм de Бела–кривошип является механизм, который преобразует круговое движение в поступательное или наоборот. … Экстрим что сломанный стержень (т. кривошип) прикреплен к неподвижной точке, центру вращения, а другой конец прикреплен к Бела.
Из каких частей состоит шатунно-кривошипный механизм?
El шатунный механизм–кривошип Он состоит из вращающейся части (кривошип) и прямолинейной направляющей (обычно цилиндром), соединенной Бела; В многоцилиндровых двигателях внутреннего сгорания чудаки Они расположены на > одном коленчатом валу.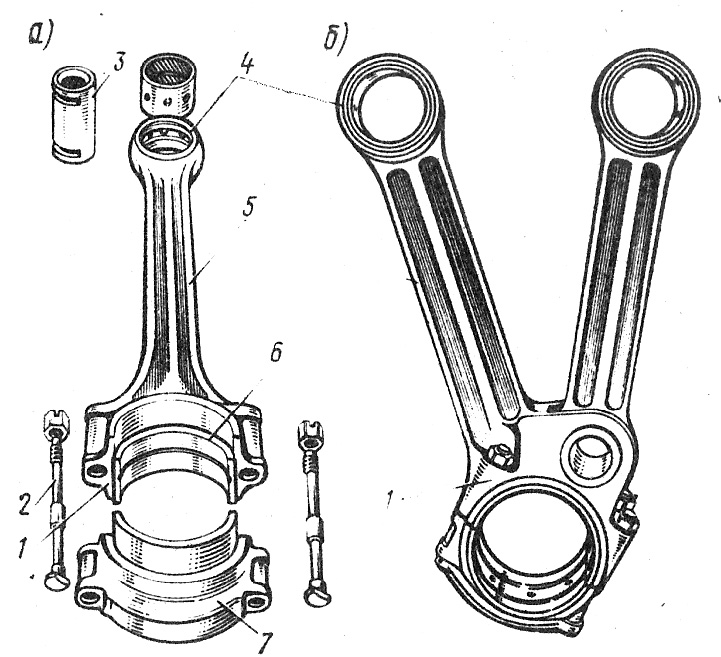
Какая польза от шатуна?
La Бела Это элемент двигателя, отвечающий за передачу давления газов, воздействующих на поршень, на коленчатый вал. Или, что то же самое, это звено в цепи, преобразующей знакопеременное смещение поршней во вращение коленчатого вала.
Что такое примеры кривошипа?
— Один кривошип это бар что может вращаться и что он прикреплен к валу. Когда кривошип, вал также вращается. … — Шатун и кривошип Их часто используют вместе, образуя шатунную систему.кривошип, Один из Ejemplos самое известное из них — колеса паровозов.
Какие виды кривошипов существуют?
-Два существует тип в основном из чудаки. С одной стороны, есть так называемые ножные, такие как в педальных швейных машинах. С другой стороны, есть те, которые известны как движущие силы.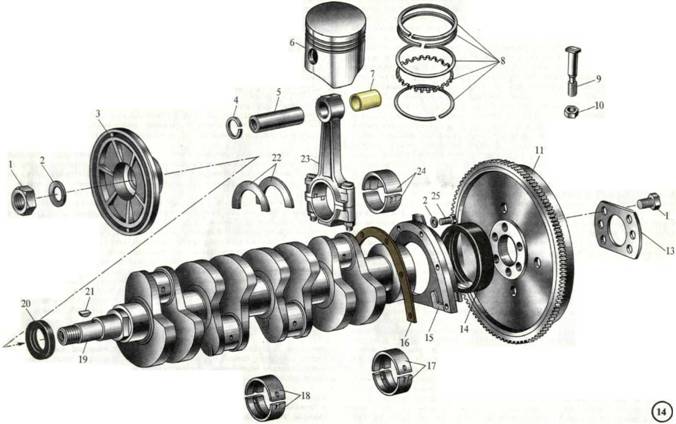
Что такое кривошипно-ползунковый шатунный механизм и его разновидности?
El механизм Примером этого может служить поршневой привод двигателя внутреннего сгорания. механизм передача применяется в обратном направлении; в виде su вход представляет собой возвратно-поступательное движение поршня и su выход непрерывного вращательного движения коленчатого вала. …
Какой механизм представляет собой эксцентриковый шатун?
Для системы эксцентричный–Бела коленвал заменен на эксцентричный, подключение Бела к оси эксцентрико и остальная часть механизм похож на предыдущий. …В своем круговом движении головка Бела волочить ногу Бела, что совершает возвратно-поступательное линейное движение.
Что такое слайдерный механизм?
El механизм кривошип слайд является механизм что позволяет получить альтернативное прямолинейное движение из вращательного и наоборот.
Из каких частей состоит коленчатый вал?
В коленчатый вал четыре выделяются акций основные: стержень, запястье, шея и рука.
- Ось служит направляющей в повороте. …
- Шейка выровнена с осью и позволяет направлять вращение, прикрепляя ее к подходящим опорам.
- Шатунная шейка служит седлом для больших концов шатунов.
Какую функцию выполняют шатун и кривошип?
Система Бела–кривошип Он состоит из вращающегося элемента, называемого кривошип, соединенный с жестким стержнем, называемым Бела, поэтому, когда вы включаете кривошип, Бела он вынужден идти вперед и назад последовательно. Этот механизм преобразует круговое движение в альтернативное прямолинейное движение.
Какие компоненты входят в состав мобильной сборки?
El мобильный набор Он отвечает за преобразование тепловой энергии в механику, состоит из поршней, колец, шатунов, болтов или штифтов, коленчатого вала и крышек или подшипников.
Кто изобрел шатун коленчатого вала?
¿кто изобрел шатун? Карл Бенц и Даймлер Готлиб, это были два человека, которые произвели революцию в мире двигателей, паровоз использовал этот механизм, известный как шатун.
Какую функцию выполняют полуподшипники?
La функция главный из Cojinetes внутри двигателя заключается в уменьшении трения, возникающего между валами и деталями, на которых эти валы вращаются. … Кроме того, еще один его функции заключается в передаче тепла, вызванного этим трением.
Какова функция ссылки?
Un связь является элементом машины или механизм который соединяется с другими элементами и имеет движение относительно них. Ан связь или член может служить опорой, направляющей для других звеньев, передавать движения или функционировать всеми тремя способами.
Кривошипно-шатунный механизм
Эта статья представляет собой вводную теорию к уроку робототехники «Кривошипно-шатунный механизм Lego EV3″
Содержание
- Первые КШМ
- КШМ в паровых машинах
- КШМ в двигателях внутреннего сгорания
- Маятник Капицы
Первые КШМ
Первые упоминания об использовании кривошипно-шатунного механизма можно отнести ко временам Древнего Рима (примерно 3 век н. э.). Пила для каменных блоков передавала вращение водяного колеса через зубчатую передачу на кривошипно-шатунный механизм, который преобразовывал вращательное движение в возвратно-поступательное движение пильного диска. Также такие устройства можно было использовать на старых лесопильных заводах.
э.). Пила для каменных блоков передавала вращение водяного колеса через зубчатую передачу на кривошипно-шатунный механизм, который преобразовывал вращательное движение в возвратно-поступательное движение пильного диска. Также такие устройства можно было использовать на старых лесопильных заводах.
Схема древнеримской водяной пилы с КШМ
Такие машины не получили широкого распространения: деревянные детали из-за большого количества трущихся деталей быстро изнашивались и требовали частого ремонта, а рабский труд был значительно дешевле и не требовал высокой квалификации рабочих.
В 16 веке на деревянных прялках появился кривошипно-шатунный механизм. Прялка — ручная машина для прядения шерсти, состоящая из двух катушек. В самовращающемся колесе для скручивания нити использовался принцип ременной передачи. Раньше большую катушку приходилось откручивать руками. К прялке добавили педаль. Нажимая ногой на педаль, рабочий мог крутить катушку без помощи рук. Этот механизм упростил работу и позволил производить больше пряжи за то же время. В этом устройстве возвратно-поступательное движение педали через деревянный шатун передавалось кривошипу и преобразовывалось во вращательное движение большой катушки (шкива).
В этом устройстве возвратно-поступательное движение педали через деревянный шатун передавалось кривошипу и преобразовывалось во вращательное движение большой катушки (шкива).
Автоматический ножной поворотный ролик и КШМ позволили освободить руки и сделать работу более продуктивной
КШМ в паровых машинах
С начала 18 века паровые машины стали получать широкую популярность среди изобретателей и ученых. Первая паровая машина для водяного насоса была построена в 1705 году английским изобретателем Томасом Ньюкоменом для откачки воды из глубоких шахт.
Позднее паровая машина была усовершенствована шотландским инженером и механиком Джеймсом Уаттом (1736-1819). Кстати, именно Джеймс Уатт ввел термин «лошадиная сила», и в его честь была названа силовая установка Уатта. Паровая машина Уатта получила сложную систему соединенных шатунов и планетарную передачу, преобразующую возвратно-поступательное движение поршня во вращательное движение маховика (большого, тяжелого колеса). Эта паровая машина стала универсальной, так как, в отличие от машины Ньюкомена, поршень имел рабочий ход в обе стороны. Двигатель Уатта широко применялся на ткацких фабриках, в металлургии, при строительстве первых паровозов для железных дорог в 18 веке.
Эта паровая машина стала универсальной, так как, в отличие от машины Ньюкомена, поршень имел рабочий ход в обе стороны. Двигатель Уатта широко применялся на ткацких фабриках, в металлургии, при строительстве первых паровозов для железных дорог в 18 веке.
Паровая машина Джеймса Уатта. Вместо кривошипа сложная планетарная передача Шотландский изобретатель Джеймс Уатт
Надо сказать, что паровыми машинами в те времена занимались многие изобретатели. Так, в Российской империи инженер Иван Иванович Ползунов (1728-1766) изобрел свою двухцилиндровую паровую машину).
В 19 веке паровую машину Уатта упростили, заменив сложный планетарный механизм кривошипно-шатунным механизмом.
Паровая машина с кривошипно-шатунным механизмом
Схема паровой машины с кривошипно-шатунным механизмом
Паровая машина с КШМ нашла широкое применение при строительстве первых паровых машин и паровозов, перевозивших грузы по железной дороге.
Локомотив
КШМ в двигателях внутреннего сгорания
До сих пор мы рассматривали использование кривошипно-шатунного механизма в паровых машинах. В паровой машине топливо сжигается в топке (вне цилиндра) и нагревает водяной котел, а пар в цилиндре толкает поршень.
В паровой машине топливо сжигается в топке (вне цилиндра) и нагревает водяной котел, а пар в цилиндре толкает поршень.
В двигателе внутреннего сгорания горючая смесь (воздух+газ, или воздух+бензин и т.д.) воспламеняется внутри цилиндра и продукты сгорания толкают поршень. Короче говоря, эти двигатели называются двигателями внутреннего сгорания.
Первый одноцилиндровый газовый двигатель внутреннего сгорания был построен в 1860 году в Париже французским изобретателем Жаном Ленуаром.
Двигатель внутреннего сгорания Жана Ленуара (внешне очень похож на паровой двигатель)
Однако двигатели внутреннего сгорания получили широкое распространение в конце 19 века после производства керосина и бензина из нефти. Появление жидкого топлива позволило создать недорогие маломассивные двигатели, которые можно было использовать для приведения в движение транспортных средств.
В 1881-1885 гг. Русский изобретатель Огнеслав Костович спроектировал и построил в России восьмицилиндровый двигатель мощностью 59 кВт.
Двигатель внутреннего сгорания Огнеслав Костович
В 1897 году немецкий инженер Рудольф Дизель спроектировал и построил первый двигатель с воспламенением от сжатия. Это был компрессорный двигатель, работавший на керосине, впрыскиваемом в цилиндр сжатым воздухом.
Рудольф Дизель и его двигатель внутреннего сгорания
Все эти двигатели внутреннего сгорания имели схожие характеристики и использовали кривошипно-шатунный механизм для преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала.
Давайте посмотрим на конструкцию современного двигателя внутреннего сгорания.
Схема кривошипно-шатунного механизма двигателя внутреннего сгорания
Общие определения:
Поршень совершает возвратно-поступательные движения вдоль цилиндра, движется вверх и вниз.
Шатун — это деталь, которая соединяет кривошип и поршень.
Кривошип – условная деталь, соединяющая шатун с коленчатым валом.
Противовес снижает вибрацию при вращении коленчатого вала.
Блок цилиндров – это корпус, в котором расположены цилиндры двигателя.
Поршневой палец представляет собой цилиндрическую деталь, ось вращения шатуна по отношению к поршню.
Коленчатый вал (коленвал) — ось вращения ступенчатой формы.
Верхняя мертвая точка — крайнее верхнее положение поршня, при котором изменяется направление его движения.
Нижняя мертвая точка — самое нижнее положение поршня, при котором меняется направление его движения.
Ход поршня: расстояние между крайними положениями поршня. Равен удвоенному радиусу кривошипа.
Блок цилиндров, поршень с шатуном и коленвалом
Обычный маятник, если его перевернуть вверх дном, неустойчив. Ему крайне сложно найти верхнюю точку равновесия. Но если совершать быстрые вертикальные знакопеременные колебания, то положение такого маятника стабилизируется.
Петр Леонидович Капица
Советский академик, лауреат Нобелевской премии по физике Петр Леонидович Капица (1894 — 1984) использовал модель маятника с вибрирующим подвесом для построения новой теории, описывающей эффекты стабилизации тел или частиц. Работа Капицы по стабилизации маятника была опубликована в 1951 году, а сама модель получила название «маятник Капицы». Кроме того, было открыто новое направление в физике — вибрационная механика. Эта модель позволила наглядно продемонстрировать возможности высокочастотной электромагнитной стабилизации пучков заряженных частиц в ускорителях.
Работа Капицы по стабилизации маятника была опубликована в 1951 году, а сама модель получила название «маятник Капицы». Кроме того, было открыто новое направление в физике — вибрационная механика. Эта модель позволила наглядно продемонстрировать возможности высокочастотной электромагнитной стабилизации пучков заряженных частиц в ускорителях.
Владимир Игоревич Арнольд
Другой советский математик и академик Владимир Игоревич Арнольд (1937-2010), который был заместителем Капицы, вспоминал его слова:
«Он (Капица — прим.) сказал: «Посмотрите, когда изобретается какая-то физическая теория, прежде всего надо сделать небольшой прибор, на котором ее можно было бы наглядно продемонстрировать любому. Например, Будкер и Векслер хотят построить ускорители в очень сложной системе. Но я видел, что уравнения, которые говорят об устойчивости этой балки, означают, что если маятник перевернуть вверх дном, то он обычно неустойчив, он падает. Но если точка подвеса совершает быстрые вертикальные колебания, то она становится устойчивой. Хотя ускоритель стоит много миллионов, этот маятник можно сделать очень легко. Я сделал его на основе электрической швейной машинки, он здесь». Он провел нас в соседнюю комнату и показал нам этот вертикальный маятник на основе швейной машинки».
Хотя ускоритель стоит много миллионов, этот маятник можно сделать очень легко. Я сделал его на основе электрической швейной машинки, он здесь». Он провел нас в соседнюю комнату и показал нам этот вертикальный маятник на основе швейной машинки».
Демонстрация динамической стабилизации перевернутого маятника с помощью электробритвы
У математика Арнольда не было своей швейной машинки, и он был расстроен. Зато у него была электробритва Нева, из которой был собран перевернутый маятник. К сожалению, в первой конструкции маятник упал. Тогда Арнольд вывел формулу и увидел, что длина маятника не должна быть больше 12 сантиметров. Известный математик укоротил подвеску до 11 сантиметров и все получилось.
Посмотрим, какие силы действуют на «маятник Капицы». После прохождения верхней мертвой точки маятниковая подвеска начинает тянуть вес вниз. После прохождения нижней мертвой точки подвеска толкает вес вверх. Поскольку углы между векторами силы в верхней и нижней точках различны, сумма их векторов дает силу, направленную к оси вертикальных колебаний маятника. Если эта сила больше силы тяжести, то верхнее положение маятника стабилизируется.
Если эта сила больше силы тяжести, то верхнее положение маятника стабилизируется.
А эта формула описывает зависимость между частотой колебаний подвеса, амплитудой колебаний и длиной жесткого подвеса.
Кривошип (механизм) | История Вики
в:
Страницы, использующие магические ссылки ISBN, Машиностроение, Ссылки
Файл:Кривошипный механизм геометрии sk.png
Кривошип представляет собой рычаг, прикрепленный под прямым углом к вращающемуся валу, с помощью которого возвратно-поступательное движение передается валу или принимается от него. Он используется для преобразования кругового движения в возвратно-поступательное или возвратно-поступательного движения в круговое. Рычаг может представлять собой изогнутую часть вала или прикрепленный к нему отдельный рычаг. К концу кривошипа шарниром прикреплен стержень, обычно называемый шатуном. Конец стержня, прикрепленный к кривошипу, движется круговым движением, в то время как другой конец обычно вынужден двигаться линейным скользящим движением внутрь и наружу.
Этот термин часто относится к рукоятке с приводом от человека, которая используется для ручного поворота оси, например, в шатуне велосипеда или в скобе и дрели. В этом случае рука или нога человека служит шатуном, прикладывающим возвратно-поступательную силу к кривошипу. Часто имеется штанга, перпендикулярная другому концу руки, часто со свободно вращающейся ручкой на ней для удержания в руке или в случае работы ногой (обычно второй рукой для другой ноги), с свободно вращающаяся педаль.
Содержание
- 1 История
- 2 примера
- 2.1 Руками
- 2.2 Использование ножек
- 2.3 Двигатели
- 3 Механика
- 4 См. также
- 5 Каталожные номера
- 5.1 Библиография
- 6 Внешние ссылки
История[]
Файл: Bundesarchiv Bild 135-BB-152-11, Tibetexpedition, Tibeter mit Handmühle.jpg
Тибетец, работающий на печи (1938). Перпендикулярная рукоятка таких вращающихся ручных мельниц работает как рукоятка.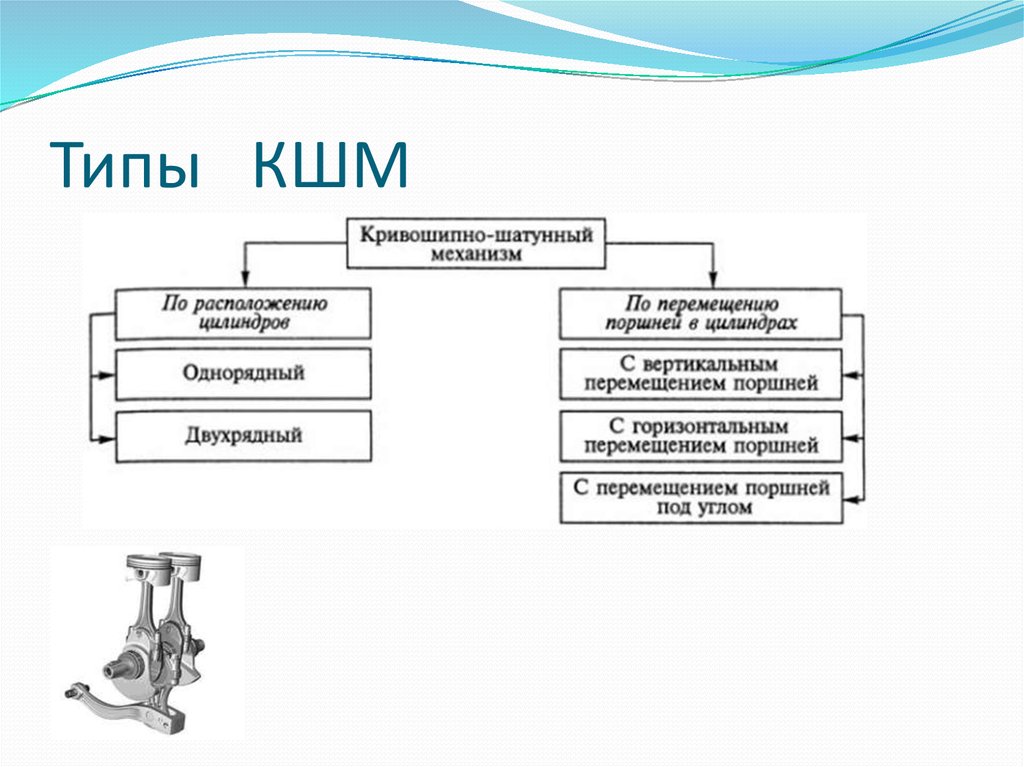 [1] [2]
[1] [2]
Эксцентриковый кривошипный механизм появился в Китае с 4 века до н.э. [3] Рукоятки с ручным приводом использовались во времена династии Хань (202 г. до н.э. — 220 г. н.э.), как модели гробниц из глазурованной глины эпохи Хань с изображениями 1-го века до н.э., а затем использовались в Китае для наматывания шелка и для прядения конопли, для сельскохозяйственного веялки, для водяного мукопросеивателя, для металлургического меха с гидравлическим приводом и для лебедки для колодца. [4] [5] Самое раннее использование кривошипа в машине происходит в веялке с кривошипным приводом в ханьском Китае. [6]
Римская железная рукоятка была найдена при раскопках в Августе Раурике, Швейцария. Кусок длиной 82,5 см с ручкой длиной 15 см имеет пока неизвестное назначение и датируется не позднее ок. 250 г. н.э. [7] На лесопилке позднего Иераполиса (Малая Азия) 3-го века обнаружены рукоятки, а две каменные лесопилки 6-го века были также найдены в Эфесе, Малая Азия, и Герасе, Иордания. [8] В Китае кривошипно-шатунный станок появился в 5 веке, а в 6 веке — кривошипно-шатунный станок с поршневым штоком. [3]
[8] В Китае кривошипно-шатунный станок появился в 5 веке, а в 6 веке — кривошипно-шатунный станок с поршневым штоком. [3]
Устройство, изображенное в каролингской рукописи начала 9 века Утрехтская псалтирь , представляет собой кривошипную рукоятку, используемую с вращающимся точильным камнем. [9] Ученые указывают на использование кривошипных рукояток в трепанационных сверлах в работе X века испанского хирурга-мусульманина Абу аль-Касима аль-Захрави (936–1013). [9] Бенедиктинский монах Феофил Пресвитер (ок. 1070–ок. 1125) описал кривошипные рукоятки, «используемые при токарной обработке литейных стержней», согласно Нидхэму. [10]
В мусульманском мире неручной кривошип появляется в середине 9-го века в нескольких гидравлических устройствах, описанных братьями Бану Муса в их Книге изобретательных устройств . [11] Эти кривошипы с автоматическим управлением появляются в нескольких устройствах, описанных в книге, два из которых имеют действие, близкое к действию коленчатого вала.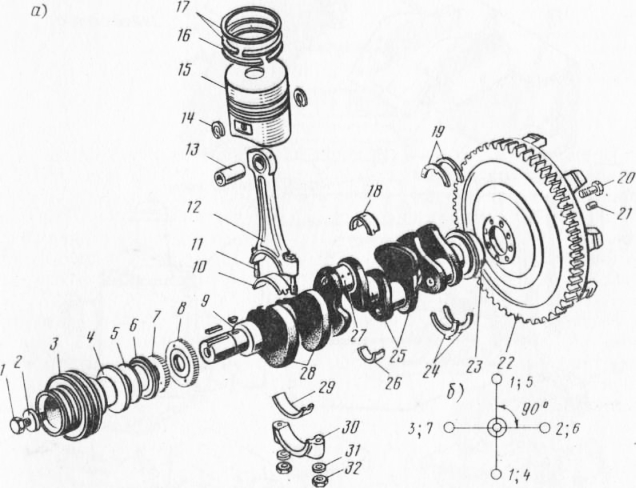 Автоматическая рукоятка братьев Бану Муса не позволяла бы полностью вращаться, но потребовалась лишь небольшая модификация, чтобы преобразовать ее в коленчатый вал. [12] Арабский изобретатель Аль-Джазари (1136–1206) описал кривошипно-шатунную систему во вращающейся машине двух своих водоподъемных машин. [13] Его двухцилиндровый насос включал в себя самый ранний из известных коленчатых валов, [14] , в то время как его другая машина включала в себя первый известный кривошипно-ползунковый механизм. [15] Итальянский врач и изобретатель Гвидо да Виджевано (ок. 1280–1349) сделал иллюстрации для байдарки и военной повозки, которые приводились в движение коленчатыми валами и зубчатыми колесами, вращаемыми вручную. [16] Кривошип стал обычным явлением в Европе к началу 15 века, его можно увидеть в работах таких, как военный инженер Конрад Кьезер (1366–после 1405). [16]
Автоматическая рукоятка братьев Бану Муса не позволяла бы полностью вращаться, но потребовалась лишь небольшая модификация, чтобы преобразовать ее в коленчатый вал. [12] Арабский изобретатель Аль-Джазари (1136–1206) описал кривошипно-шатунную систему во вращающейся машине двух своих водоподъемных машин. [13] Его двухцилиндровый насос включал в себя самый ранний из известных коленчатых валов, [14] , в то время как его другая машина включала в себя первый известный кривошипно-ползунковый механизм. [15] Итальянский врач и изобретатель Гвидо да Виджевано (ок. 1280–1349) сделал иллюстрации для байдарки и военной повозки, которые приводились в движение коленчатыми валами и зубчатыми колесами, вращаемыми вручную. [16] Кривошип стал обычным явлением в Европе к началу 15 века, его можно увидеть в работах таких, как военный инженер Конрад Кьезер (1366–после 1405). [16]
Кривошипные шатуны раньше использовались на некоторых машинах в начале 20-го века; например, почти все фонографы до 1930-х годов приводились в действие заводными двигателями с заводными рукоятками, а двигатели внутреннего сгорания автомобилей обычно запускались с помощью рукояток (известных как пусковые рукоятки в Великобритании), прежде чем электрические стартеры стали широко использоваться.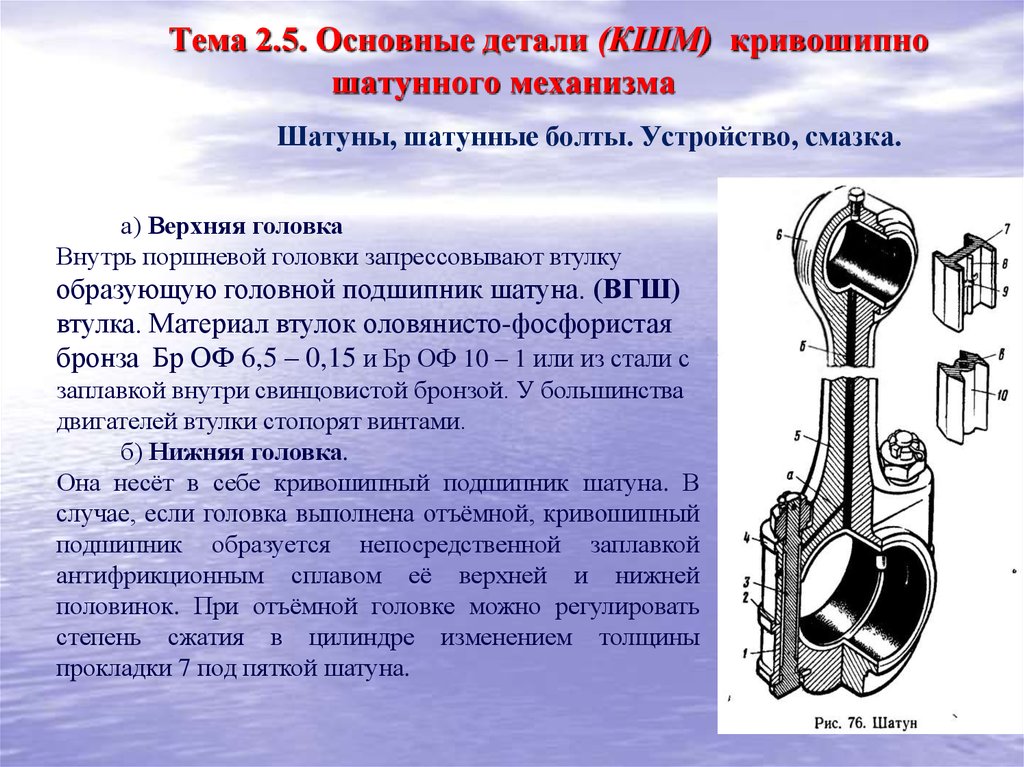
Примеры[]
Файл:Преобразование вращательного движения в линейное crank.jpg
Кривошипная рукоятка
Файл:CrankPencilShapener.jpg
Ручная рукоятка на точилке для карандашей
Знакомые примеры включают:
Рукой[]
- Механическая точилка для карандашей
- Рыболовная катушка и другие катушки для кабелей, проводов, канатов и т. д.
- Окно автомобиля с ручным управлением
- комплект рукояток, который приводит в движение трикке через ручки.
С помощью ножек[]
- шатунов, приводящих в движение велосипед с помощью педалей.
- швейная машина с педалью
Двигатели[]
Почти во всех поршневых двигателях используются кривошипы для преобразования возвратно-поступательного движения поршней во вращательное движение. Шатуны встроены в коленчатый вал.
Механика[]
Смещение конца шатуна примерно пропорционально косинусу угла поворота кривошипа при измерении от верхней мертвой точки. Таким образом, возвратно-поступательное движение, создаваемое постоянно вращающимся кривошипом и шатуном, приблизительно представляет собой простое гармоническое движение:
Таким образом, возвратно-поступательное движение, создаваемое постоянно вращающимся кривошипом и шатуном, приблизительно представляет собой простое гармоническое движение:
где x — расстояние от конца шатуна до оси кривошипа, l — длина шатуна, r — длина кривошипа, а α угол поворота коленчатого вала, измеренный от верхней мертвой точки (ВМТ). Технически возвратно-поступательное движение шатуна немного отличается от синусоидального из-за изменения угла шатуна во время цикла.
Механическое преимущество кривошипа, соотношение между силой, действующей на шатун, и крутящим моментом на валу, меняется на протяжении цикла кривошипа. Соотношение между ними примерно такое:
где крутящий момент и F сила на шатуне. Для данной силы на кривошипе крутящий момент максимален при углах кривошипа α = 90° или 270° от ВМТ. Когда кривошип приводится в движение шатуном, возникает проблема, когда кривошип находится в верхней мертвой точке (0°) или нижней мертвой точке (180°). В эти моменты цикла кривошипа сила, действующая на шатун, не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и находится в одной из этих двух точек, он не может быть приведен в движение шатуном. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, два шатуна крепятся к колесам в точках 9.0° друг от друга, так что независимо от положения колес при запуске двигателя по крайней мере один шатун сможет создать крутящий момент для запуска поезда.
В эти моменты цикла кривошипа сила, действующая на шатун, не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и находится в одной из этих двух точек, он не может быть приведен в движение шатуном. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, два шатуна крепятся к колесам в точках 9.0° друг от друга, так что независимо от положения колес при запуске двигателя по крайней мере один шатун сможет создать крутящий момент для запуска поезда.
См. также[]
- Лебедка
- Уравнения движения поршня
- Ничего шлифовального станка
- Солнечная и планетарная передача
Ссылки[]
- ↑ Ritti, Grewe & Kessener 2007, p. 159
- ↑ Лукас 2005, с. 5, фн. 9
- ↑ 3,0 3,1 Джозеф Нидхэм (1975), «История и человеческие ценности: китайский взгляд на мировую науку и технику», Philosophy and Social Action II (1-2): 1-33 [4], http://citeseerx . ist.psu.edu/viewdoc/download?doi=10.1.1.122.293&rep=rep1&type=pdf#page=12, получено 13 марта 2010 г. .
- ↑ Needham 1986, стр. 118–119.
- ↑ Темпл, Роберт. (1986). Гений Китая: 3000 лет науки, открытий и изобретений , с. 46. С нападающим Джозефом Нидхэмом. Нью-Йорк: Саймон и Шустер, Inc. ISBN 0671620282.
- ↑ Н. Сивин (август 1968 г.), «Обзор: Наука и цивилизация в Китае Джозефа Нидхэма», Журнал азиатских исследований (Ассоциация азиатских исследований) 27 (4): 859-864 [862 ], http://www.jstor.org/stable/2051584
- ↑ Лаур-Беларт 1988, с. 51–52, 56, рис. 42
- ↑ Ритти, Греве и Кессенер 2007, с. 161
- ↑ 9,0 9,1 Needham 1986, p. 112.
- ↑ Needham 1986, стр. 112–113.
- ↑ А. Ф. Л. Бистон, М. Дж. Л. Янг, Дж. Д. Латам, Роберт Бертрам Сержант (1990), Кембриджская история арабской литературы , Cambridge University Press, с. 266, ISBN 0521327636
- ↑ Бану Муса, Дональд Рутледж Хилл (1979), Книга гениальных устройств (Китаб аль-Хиял) , Springer, стр. 23-4, ISBN 08339
- ↑ Ахмад И Хассан. Кривошипно-шатунная система в машине с непрерывным вращением.
- ↑ Салли Ганчи, Сара Ганчер (2009), Ислам и наука, медицина и технологии , The Rosen Publishing Group, p. 41, ISBN 1435850661
- ↑ Лотфи Ромдхан и Саид Зеглул (2010), «Аль-Джазари (1136–1206)», History of Mechanism and Machine Science (Springer) 7 : 1-21, doi: 10.1007/978-90- 481-2346-9, ISBN 978-90-481-2346-9, ISSN 1875-3442
- ↑ 16,0 16,1 Needham 1986, p. 113.
 ist.psu.edu/viewdoc/download?doi=10.1.1.122.293&rep=rep1&type=pdf#page=12, получено 13 марта 2010 г. .
ist.psu.edu/viewdoc/download?doi=10.1.1.122.293&rep=rep1&type=pdf#page=12, получено 13 марта 2010 г. .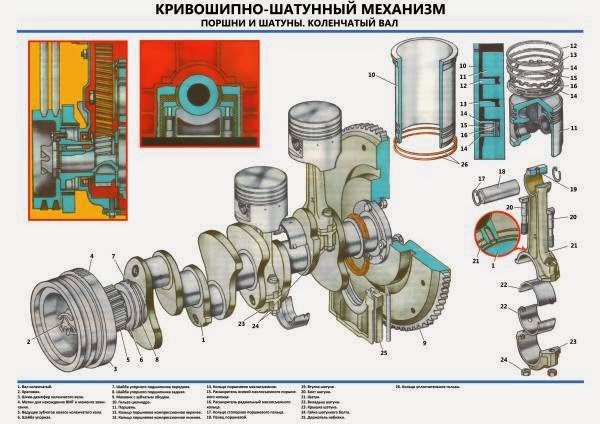 266, ISBN 0521327636
266, ISBN 0521327636 Библиография []
- Лукас, Адам Роберт (2005), «Промышленное измельчение в древнем и средневековом мире. Обзор свидетельств промышленной революции в средневековой Европе», Технология и культура 46 : 1–30
- Лаур-Беларт, Рудольф (1988), Führer durch Augusta Raurica (5-е изд. ), август
- Нидхэм, Джозеф (1991), Наука и цивилизация в Китае: Том 4, Физика и физические технологии: Часть 2, Машиностроение , издательство Кембриджского университета, ISBN 0521058031 .
- Ритти, Тулия; Греве, Клаус; Кессенер, Пол (2007), «Рельеф каменной лесопилки с водным приводом на саркофаге в Иераполисе и ее последствия», Journal of Roman Archaeology 20 : 138–163
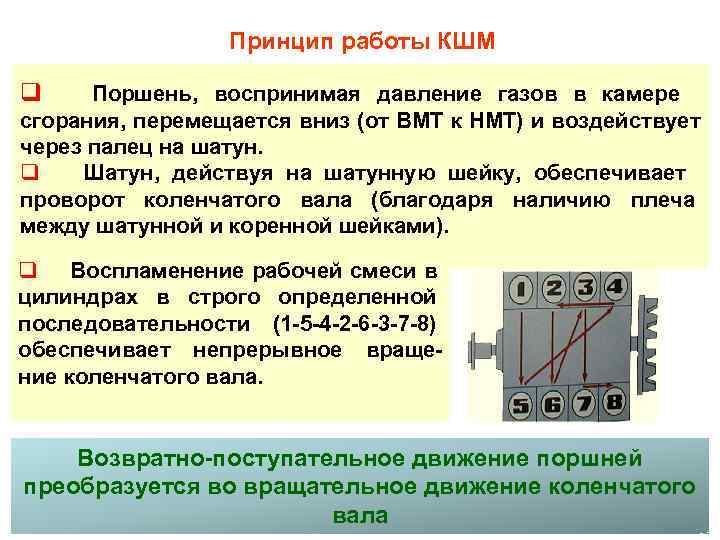 ), август
), август Внешние ссылки []
- Crank: гипервидео конструкции и работы четырехцилиндрового двигателя внутреннего сгорания, любезно предоставленное Ford Motor Company
- Цифровая библиотека кинематических моделей для проектирования (KMODDL) — фильмы и фотографии сотен работающих моделей механических систем в Корнельском университете. Также включает электронную библиотеку классических текстов по механическому дизайну и инженерии.
Контент сообщества доступен по лицензии CC-BY-SA, если не указано иное.
Кривошипные механизмы
7.2 Кривошипно-шатунные механизмы
Другим механизмом, который очень широко используется в конструкции машин, является кривошипно-ползунковый механизм. Он в основном используется для преобразования вращательного движения в возвратно-поступательное или наоборот. Ниже показан кривошипно-ползунковый механизм и приведены параметры, которые используются для определения углов и длин звеньев. Как и в четырехзвенниковом механизме, выдвинутая и сложенная мертвые точки находятся в том случае, когда кривошип и муфта коллинеарны (соединительное звено обычно называют 9).0303 шатун в кривошипно-кривошипных механизмах). Полный поворот кривошипа возможен, если эксцентриситет с меньше разницы между длинами шатуна и кривошипа, а длина кривошипа меньше длины шатуна (например, c3-a 2 ) и a 3 >а 2 ).
Использование прямоугольных треугольников, образованных в мертвых точках:
Отметив s =se-sf = ход = расстояние, которое ползунок проходит между мертвыми точками. Если мы допустим l= a2/a3 и e = c/a3, ход будет равен:
Если мы допустим l= a2/a3 и e = c/a3, ход будет равен:
Если эксцентриситет c (или a1) равен нулю ( c = 0), кривошипно-шатунный механизм называется рядным кривошипно-ползунковым механизмом = 2а 2 ). Если эксцентриситет не равен нулю (c ¹0), его обычно называют кривошипно-кривошипным механизмом со смещением .
Угол передачи можно определить из уравнения:
а 3 cos=a 2 sin 12 -c | (1) |
Максимальное отклонение угла передачи возникает, когда производная m по q 12 равен нулю. Следовательно, дифференцируя уравнение (1) по q 12 :
| (2) |
Максимальное или минимальное отклонение имеет место, когда q 12 равно 90 0 или 270 0 (рис. 7.19), а значение максимального или минимального угла передачи определяется как:
7.19), а значение максимального или минимального угла передачи определяется как:
| (3) |
Если c положительно, как показано ниже, угол передачи является критическим, когда q 12 =270 0 . Если с отрицательно, то самый критический угол передачи находится на уровне 9000°.
q 12 =90 0 .
Если эксцентриситет с равен нулю, максимальное значение угла передачи:
| (4) |
В поршневых насосах отношение кривошипа к шатуну поддерживается менее 1/4, что соответствует 14,48 0 максимальному отклонению угла передачи от 90 0 . Поскольку длина кривошипа фиксирована требуемым ходом (a 2 = s/2), необходимо увеличить длину шатуна для лучших углов передачи. Однако это увеличит размер механизма.
Однако это увеличит размер механизма.
Подобно задаче об угле передачи в четырехзвенных механизмах, задача об угле передачи в кривошипно-ползунковых механизмах может быть сформулирована следующим образом:
«Определить пропорции ползун-кривошип с заданным ходом, s, и соответствующим поворотом кривошипа между мертвыми точками, f, таким образом, чтобы максимальное отклонение угла передачи от 90 0 было минимальным».
Задачу снова можно рассмотреть в двух частях. Первая часть — это определение ползунковых кривошипных механизмов с заданным ходом и соответствующим поворотом кривошипа. Вторая часть заключается в определении одного конкретного кривошипно-ползунного механизма с оптимальным изменением угла передачи.
Для первой части задачи обратите внимание, что ход s является функцией отношения длин звеньев, т. е. если мы удвоим длину звеньев, то и ход удвоится. Поэтому без ограничения общности пусть s=1 (найденные таким образом длины звеньев будут умножены на штрих, чтобы получить фактические значения).
Ссылаясь на рисунок, на котором кривошипно-шатунный механизм изображен в его мертвых точках, уравнения векторной петли в мертвых точках:
(5)
(6)
или комплексные номера:
(7)
(8)
Вычитание уравнения (8) из уравнения (7) и учитывая s e -s f = s = 1 :
(9)
Если положить Z = и l = a 2 /a 3 , уравнение (8) можно переписать в виде:
(10)
Для полного оборота кривошипа необходимым (но недостаточным) условием является l
(11)
Если l взять в качестве свободного параметра, то по мере его изменения вершина Z, определяемая (7), образует окружность, которая является геометрическим местом всех возможных движущихся точек поворота кривошипа, когда кривошип и муфта находятся в выдвинутом положении ( k круг ). Геометрическое место всех возможных фиксированных точек поворота — это еще одна окружность (k 0 окружность), которая задается Z(1+l) (начало обоих векторов — B e с реальной осью, параллельной оси ползунка) .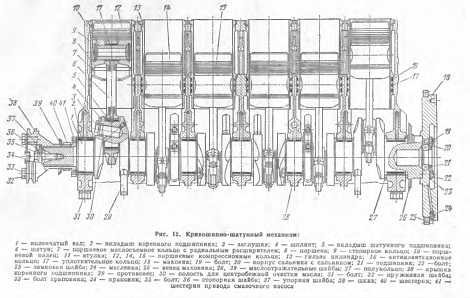 . Любая линия, проведенная от B e , пересекает эти окружности в точках A e и A 0 соответственно, в результате чего кривошипно-ползунковый механизм находится в положении выдвинутой мертвой точки. Ниже эти кружки показаны для f=160 0 .
. Любая линия, проведенная от B e , пересекает эти окружности в точках A e и A 0 соответственно, в результате чего кривошипно-ползунковый механизм находится в положении выдвинутой мертвой точки. Ниже эти кружки показаны для f=160 0 .
Эксцентриситет c может быть получен как мнимая компонента вектора B e A 0 = B e A e +A e A 0 , что можно записать как:
(12)
или с помощью Z и l:
(13)
и подставив значение Z:
(14)
Длины ссылок теперь могут быть выражены как:
(15)
(16)
Уравнения (14-16) дают единственно бесконечный набор решений для кривошипно-ползунных механизмов, удовлетворяющих заданному вращению кривошипа (ход = 1 единица). Можно также использовать эксцентриситет, длину кривошипа или соединительного звена в качестве свободного параметра для определения длины других звеньев.
Для геометрического решения:
Пример 4.6 :
Определить длины звеньев кривошипно-шатунного механизма с ходом s=120 мм, соответствующим поворотом кривошипа f=160 0 и отношением кривошипа к звену муфты l=0,5.
Используя единичный ход, из уравнений (14), (15) и (16) длины звеньев составляют:
a 2 = 0,47881, a 3 = 0,95762 и c = 0,23523. Для s = 120:
a 2 = 114,91 мм, a 3 = 57,46 мм и c = 28,23 мм.
Минимальный угол передачи для этого механизма составляет м мин = 41,79 0 .
Пример 4.7:
Определить длины звеньев кривошипно-ползункового механизма с тем же ходом и соответствующим вращением кривошипа, что и в примере 1, но вместо указанного отношения кривошипа к звену муфты эксцентриситет задан как c = 20 мм.
Для единичного хода c = 20/120 = 0,16667. Решение уравнения (10) для l дает:
Решение уравнения (10) для l дает:
(17)
Для c = 0,16667 l 2 = 0,325635. Подставляя в уравнения (15) и (16), а 2 = 0,48508 и 3 = 0,85006. Для s = 120 мм, c = 20 мм, a 2 = 58,21 мм и a 3 = 102,01 мм. Минимальный угол передачи для этого механизма м мин = 39,94 0 . Обратите внимание, что аналогичную процедуру можно выполнить, если указана длина кривошипа или соединительного звена.
Минимальный угол передачи при q = p/2:
(18)
Для полного поворота кривошипа c+ a 2 3 или c 3-a 2 . В предельном положении (c = a 3 — a 2 ) m min = 0. Используя уравнения (14), (15) и (16), это условие дает пределы f для вращаемости кривошипа как:
и
Выражение m min через l и f (подставьте уравнения 14,15 и 16 в уравнение 18 и упростите) быть максимум
Если значение l , что делает производную равной нулю:
выходит.
(21)
Где Q = l 2 opt t 2 и t = tan(f/2). Корни уравнения (21):
(22)
Поскольку Q должно быть положительным, Q >2 не является решением. В соответствии с Q 3 , l=1/t 2 , отклонение минимального угла передачи 90 0 максимально (cosm min =1). Корень Q 1 дает значение l opt в диапазоне (1/t 2 , l), удовлетворяющее необходимому и достаточному условию кривошипно-кривошипного механизма с оптимальными передаточными характеристиками. Следовательно:
(23)
единственное оптимальное решение.
Пример 4.8:
Для хода ползуна s =120 мм и соответствующего поворота кривошипа f=160 0 определите кривошипный механизм ползуна с оптимальными характеристиками передачи усилия.
Из уравнения (20) . Используя уравнения (14), (15) и (16) для единичного хода, длины звеньев равны 2 = 0,465542 ; а 3 = 1,14896; с = 0,377378 и для хода 120 мм:
a 2 = 55,87 мм; а 3 = 137,88 мм; c= 42,81 мм
Минимальный угол передачи механизма составляет m min = 42,81 0 .
Результаты приведены в таблице 2. Длины звеньев ползун-кривошип ( a 2 , a 3 , c) и оптимальные значения и минимальный угол передачи м мин в зависимости от оборотов кривошипа между мертвыми точками. На диаграмме 3 приведены все возможные решения и их минимальные значения угла передачи (обратите внимание, что горизонтальная ось не имеет линейной шкалы).
©es
Глава 5. Планарные связи
Йи Чжан
с
Сьюзен Фингер
Стефанни Беренс
Содержание
5.
 1 Введение
1 Введение
5.1.1 Что такое механизмы связи?
Задумывались ли вы когда-нибудь, какой механизм вызывает появление ветрового стекла?
стеклоочиститель на лобовом стекле автомобиля колебаться ( рис.
5-1а)? Механизм, показанный на рис. 5-1b,
преобразует вращательное движение двигателя в колебательное
стеклоочистителя.
Рисунок 5-1 Стеклоочиститель
Давайте сделаем простой механизм с аналогичным поведением. Возьми немного
картона и сделайте четыре полоски, как показано на рисунке
5-2а.
Возьмите 4 штифта и соберите их, как показано на рисунке.
5-2б.
Теперь держите 6 дюймов. полоса, чтобы он не мог двигаться и поворачивать
3 дюйма полоска. Вы увидите, что 4in. полоса колеблется.
Рисунок 5-2 Четырехрычажный механизм своими руками
Четырехрычажная связь является самым простым и часто наиболее полезным механизмом.
Как мы упоминали ранее, механизм, состоящий из твердых тел и
младшие пары называется связью
(Охота 78).
В планарных механизмах существует только два вида
нижние пары —
оборотные пары и
призматические пары.
Простейшая замкнутая связь — это четырехзвенниковая связь.
четыре элемента, три подвижных звена, одно фиксированное звено и четыре штифта
суставы. Связь, имеющая хотя бы одно фиксированное звено, является механизмом.
Следующий пример четырехзвенной связи был создан в SimDesign в simdesign/fourbar.sim
Рисунок 5-3 Соединение с четырьмя стержнями в SimDesign
Этот механизм имеет три подвижных звена. Две ссылки закреплены на
кадр, который не показан на этой картинке. В SimDesign ссылки могут
быть прибиты к фону, тем самым превращая их в рамку.
Сколько степеней свободы у этого механизма?
Если мы хотим, чтобы он был только один, мы можем наложить одно ограничение на
связь, и она будет иметь определенное движение. Четырехзвенная связь
самый простой и удобный механизм.
Напоминание: Механизм состоит из твердых тел и нижних пар
называются связями (Hunt 78). В
В
плоские механизмы бывают только двух видов нижних пар: поворотные пары и призматические
пары.
5.1.2 Функции соединений
Функция рычажного механизма состоит в том, чтобы производить вращательные, колебательные,
или возвратно-поступательное движение от вращения кривошипа или порок
наоборот (Ham и др.
58). Определенные более конкретно связи могут использоваться для преобразования:
- непрерывного вращения в непрерывное вращение с постоянной или
переменное отношение угловых скоростей. - Непрерывное вращение в колебательное или возвратно-поступательное движение (или
реверс), с постоянным или переменным передаточным числом. - Колебание в колебание или возвратно-поступательное движение в возвратно-поступательное движение,
с постоянным или переменным отношением скоростей.
Связи выполняют множество различных функций, которые можно классифицировать
в соответствии с основной целью механизма:
- Генерация функции : относительное движение между звеньями
соединенный с рамой, - Генерация пути : путь точки трассировки или
- Генерация движения : движение соединительного звена.

5.2 Четырехрычажные механизмы
Одним из простейших примеров связи с ограничениями является
четырехзвенный механизм . Различные полезные механизмы могут
формироваться из четырехзвенного механизма с небольшими вариациями, такими
как изменение характера пар, пропорций звеньев,
и т. д. . Кроме того, многие механизмы сложных ссылок представляют собой комбинации
двух или более таких механизмов. Большинство четырехзвенных механизмов
относятся к одному из следующих двух классов:
- четырехзвенный рычажный механизм и
- кривошипно-кривошипный механизм.
5.2.1 Примеры
Параллелограммный механизм
В параллелограммном четырехзвенном соединении ориентация муфты
не меняется в процессе движения. На рисунке показан загрузчик.
Очевидно, поведение поддержания параллелизма важно в
погрузчик. Ковш не должен вращаться при подъеме и опускании.
Соответствующий файл SimDesign — simdesign/loader. sim.
sim.
Рисунок 5-4 Механизм фронтального погрузчика
Кривошипно-ползунковый механизм
Четырехзвенный механизм имеет некоторые специальные конфигурации, созданные
сделать одну или несколько ссылок бесконечной по длине. Кривошипная рукоятка (или
кривошипно-ползунковый) механизм, показанный ниже, представляет собой четырехзвенниковую связь с
ползунок, заменяющий бесконечно длинную выходную ссылку. Соответствующий
Файл SimDesign — simdesign/slider.crank.sim.
Рисунок 5-5 Кривошипно-ползунковый механизм
Эта конфигурация переводит вращательное движение в поступательное.
один. Большинство механизмов приводятся в движение двигателями, а кривошипы
часто используется для преобразования вращательного движения в линейное движение.
Кривошип и поршень
Вы также можете использовать ползунок в качестве входной ссылки и рукоятку в качестве
выходная ссылка. В этом случае механизм передает поступательное
движение во вращательное движение. Поршни и кривошип во внутреннем
Поршни и кривошип во внутреннем
двигатель внутреннего сгорания является примером механизма этого типа.
соответствующий файл SimDesign — simdesign/combustion.sim.
Рисунок 5-6 Кривошип и поршень
Вы можете задаться вопросом, почему слева есть еще один слайдер и ссылка.
Этот механизм имеет две мертвые точки. Ползунок и ссылка слева
помогите механизму преодолеть эти мертвые точки.
Устройство подачи блоков
Одним из интересных применений кривошипа является устройство подачи блоков.
Файл SimDesign можно найти в simdesign/block-feeder.sim
Рисунок 5-7 Устройство подачи блоков
5.2.2 Определения
В ряду планарных механизмов простейшая группа нижней пары
механизмы четырехзвенные. A Четырехрычажный механизм
состоит из четырех стержневых звеньев и четырех поворотных пар, как показано на рис. 5-8.
Рисунок 5-8 Четырехрычажный механизм
Звено напротив фрейма называется
соединительное звено и звенья шарнирно прикреплены к раме
называются боковыми ссылками .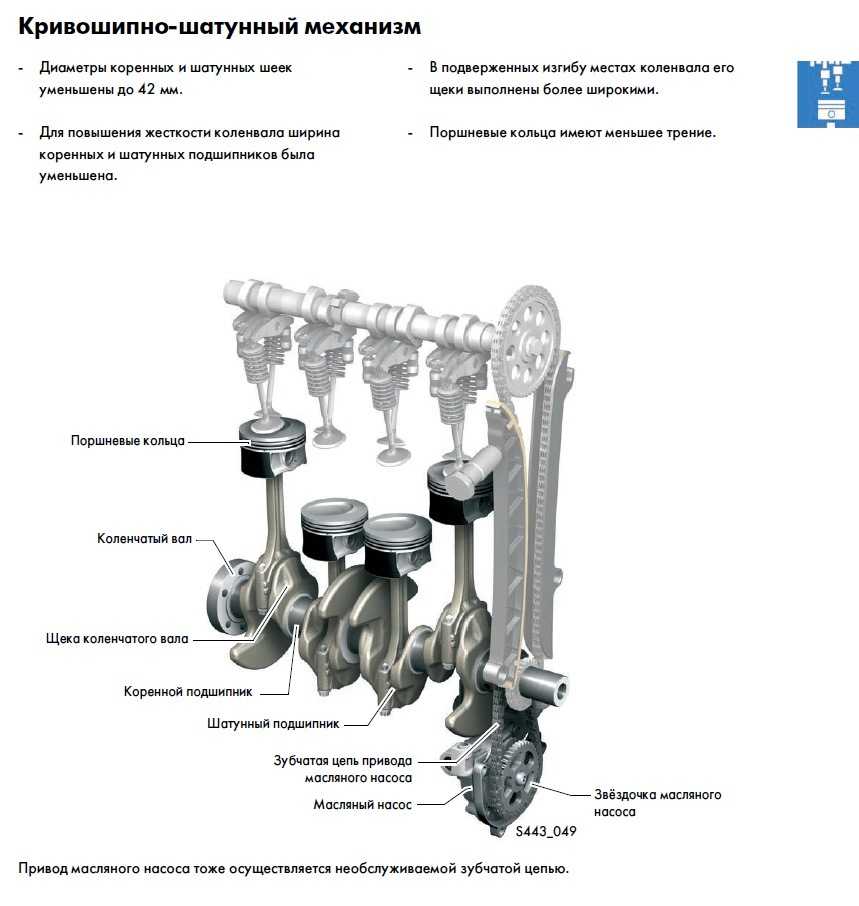 Ссылка, которую можно свободно вращать
Ссылка, которую можно свободно вращать
360 градусов по отношению ко второму звену будет называться
вращать относительно второго звена (не обязательно
Рамка). Если возможно, чтобы все четыре бара стали одновременно
выровнены, такое состояние называется точкой изменения .
Вот некоторые важные концепции механизмов ссылок:
- Кривошип : Боковая тяга, вращающаяся относительно рамы,
называется кривошип . - Кулиса : Любое невращающееся звено называется кулисой .
- Кривошипно-коромысловый механизм : В четырехзвенном рычажном механизме, если
более короткая боковая тяга вращается, а другая качается ( т.е. ,
колеблется), он называется кривошипно-коромысловым механизмом . - Двухкривошипный механизм : В четырехзвенном рычажном механизме, если оба
боковые звенья вращаются, он называется двухкривошипным механизмом . - Двойной кулисный механизм : В четырехзвенном рычажном механизме, если оба
боковые звенья качаются, он называется двухрычажным механизмом .

5.2.3 Классификация
Перед классификацией четырехзвенников нам необходимо ввести некоторые
основная номенклатура.
В четырехзвенном соединении мы имеем в виду сегмент линии между
петли на заданном звене в виде стержня , где:
- с = длина кратчайшего стержня
- l = длина самого длинного стержня
- p, q = длина промежуточного стержня
Теорема Грасгофа утверждает, что четырехзвенный механизм имеет в точке
не менее одно вращающееся звено, если
с + л
(5-1)
и все три мобильные ссылки будут качаться, если
с + л > р + q
(5-2)
Неравенство 5-1 равно критерию Грасгофа .
Все четырехзвенные механизмы попадают в одну из четырех категорий, перечисленных в
Таблица 5-1:
| Чемодан | л + верс. р + д р + д | Самый короткий стержень | Тип |
|---|---|---|---|
| 1 | Рамка | Двухкривошипный | |
| 2 | Боковой | Рукоятка коромысла | |
| 3 | Муфта | Двойной коромысло | |
| 4 | = | Любой | Точка изменения |
| 5 | > | Любой | Двойной рокер |
Из таблицы 5-1 видно, что для механизма, имеющего кривошип,
сумма длин его самого короткого и самого длинного звеньев должна быть меньше
или равной сумме длин двух других звеньев. Однако,
это условие необходимое, но недостаточное. Механизмы удовлетворения
это состояние подразделяется на следующие три категории:
- Если самая короткая ссылка является боковой ссылкой,
механизм представляет собой кривошипно-кулисный механизм. Кратчайший
звено – это кривошип в механизме. - Когда кратчайшее звено является рамкой
механизм, механизм двухкривошипный. - Когда самая короткая ссылка
звено сцепки, механизм двухкоромысловый.
 Кратчайший
Кратчайший5.2.4 Угол передачи
На рисунке 5-11, если AB является входной ссылкой,
сила, приложенная к выходному звену, CD , передается
через соединительное звено BC . (То есть, нажав на ссылку
CD накладывает силу на ссылку AB , которая передается
по ссылке BC .) Для достаточно медленных движений
(незначительные силы инерции), сила в соединительном звене чистая
растяжение или сжатие (незначительное изгибающее действие) и направлено
по г. до н.э. г. . При заданной силе в соединительном звене крутящий момент
передается на выходной бар (примерно пункт D ) максимально, когда
угол между
соединительная шина BC и выходная шина CD /2. Следовательно, угол BCD равен
называется угол передачи .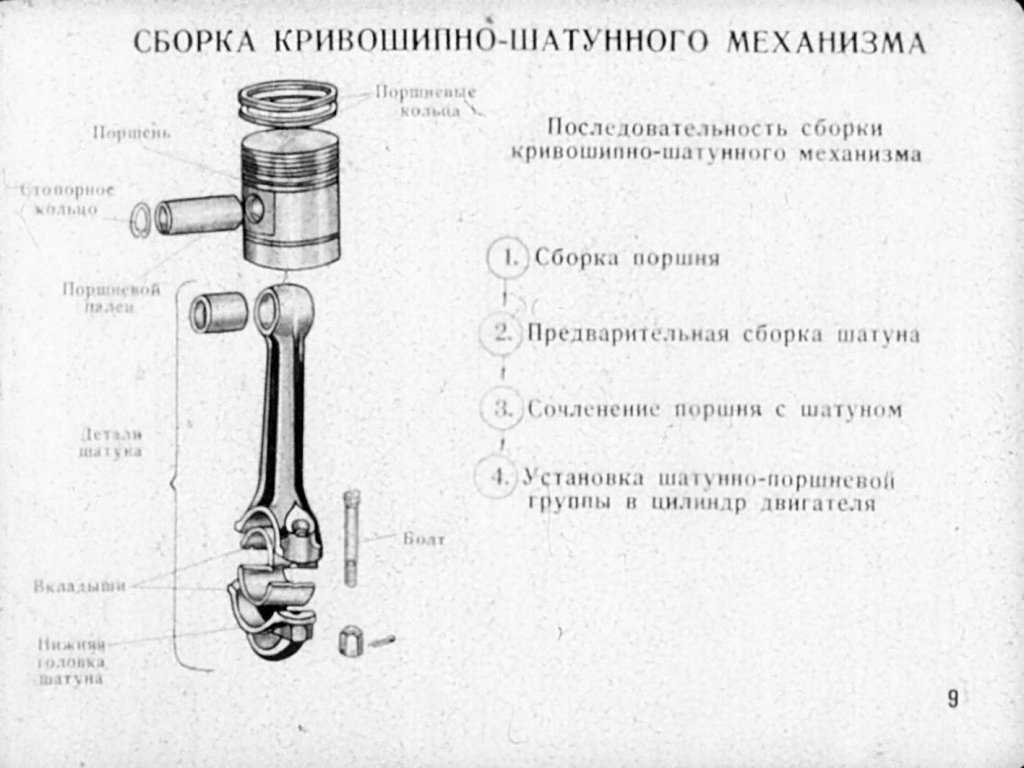
(5-3)
Рисунок 5-11 Угол передачи
Когда угол передачи значительно отклоняется от /2, крутящий момент на выходном стержне
уменьшается и может оказаться недостаточным для преодоления трения в
система. По этой причине угол отклонения =|/2-| не должно быть слишком большим. В
практике, нет определенного верхнего предела для , потому что существование
силы инерции могут устранить нежелательные силовые соотношения
которая присутствует в статических условиях. Тем не менее, следующие
Критерий можно соблюдать.
5.2.5 Мертвая точка
Когда боковое звено, такое как AB на рис. 5-10, выравнивается с соединительным звеном BC , его можно только сжать или
удлиняется муфтой. В этой конфигурации крутящий момент приложен к
ссылка на другой стороне, CD , не может вызвать вращение в ссылке
АБ . Поэтому говорят, что эта ссылка находится в мертвой точке
(иногда называется точкой переключения ).
Рисунок 5-10 Мертвая точка
На рис. 5-11, если AB является кривошипом, он может быть выровнен с BC в
полное выдвижение по линии AB 1 C 1 или в
сгибание с AB 2 в сложенном виде
Б 2 С 2 . Обозначим угол ADC через
и угол DAB на . Мы используем индекс 1 для
обозначают расширенное состояние и 2 для обозначения изогнутого состояния ссылок
AB и BC . В расширенном состоянии ссылка CD не может
вращать по часовой стрелке, не растягивая и не сжимая теоретически
жесткая линия AC 1 . Поэтому ссылка CD не может
перейти в запретную зону ниже C 1 D , и
должен быть в одном из двух
крайние положения; другими словами, ссылка CD находится в экстремуме. А
второй экстремум звена CD приходится на = 1 .
Обратите внимание, что крайние положения бокового звена происходят одновременно
с мертвыми точками противоположного звена.
В некоторых случаях мертвая точка может быть полезна для таких задач, как работа
крепления (Рисунок 5-11).
Рисунок 5-11 Рабочее крепление
В других случаях мертвая точка должна быть и может быть преодолена с помощью
момента инерции звеньев или с несимметричным развертыванием
механизм (Рисунок 5-12).
Рисунок 5-12 Преодоление мертвой точки асимметричным
развертывание (двигатель V)
5.2.6 Кривошипно-ползунковый механизм
Кривошипно-ползунковый механизм, широко известный в
двигателей, является частным случаем кривошипа-коромысла
механизм. Обратите внимание, что если качелька 3 на рис.
5-13а очень длинный, его можно заменить
блоком, скользящим в криволинейной прорези или направляющей, как показано на рисунке. Если длина
коромысла бесконечны, направляющая и блок больше не
изогнутый. Скорее, они кажутся прямыми, как показано на рис. 5-13b, а связь принимает форму
обычный кулисно-кривошипный механизм .
Рисунок 5-13 Кривошипно-ползунковый механизм
5.2.7 Инверсия кривошипно-ползункового механизма
Инверсия — это термин, используемый в кинематике для обозначения реверса или
взаимозаменяемость формы или функции применительно к кинематическим цепям и механизмам. За
например, взяв другую ссылку в качестве фиксированной, ползунковая рукоятка
механизм, показанный на рис. 5-14а, можно инвертировать
в механизмы, показанные на рис. 5-14b, c и d. Другой
примеры можно найти в применении этих механизмов. За
например, механизм насосного устройства на рис.
5-15 такой же, как на рис. 5-14b.
Рисунок 5-14 Инверсии кривошипно-золотникового механизма
Рисунок 5-15 Насосное устройство
Имейте в виду, что инверсия механизма не меняет
движения его звеньев относительно друг друга, но не изменяет их
абсолютные движения.
Содержание
- Полное оглавление
- 1 Физические принципы
- 2 Механизмы и простые механизмы
- 3 Подробнее о машинах и механизмах
- 4 Базовая кинематика жестких тел со связями
- 5 плоских соединений
- 5. 1 Введение
- 5.1.1 Что такое механизмы связи?
- 5.1.2 Функции связей
- 5.2 Четырехрычажные механизмы
- 5.2.1 Примеры
- 5.2.2 Определения
- 5.2.3 Классификация
- 5.2.4 Угол передачи
- 5.2.5 Мертвая точка
- 5.2.6 Кривошипно-ползунковый механизм
- 5.2.7 Инверсия кривошипно-ползункового механизма
- 5.2.2 Определения
- 5.1.1 Что такое механизмы связи?
- 6 кулачков
- 7 передач
- 8 Другие механизмы
- Индекс
- ссылки
- 1 Физические принципы
 1 Введение
1 ВведениеКривошип (механизм) — 3D-анимация
См. также: Ползунок и кривошипный механизм
Кривошип представляет собой рычаг, прикрепленный под прямым углом к вращающемуся валу, посредством которого возвратно-поступательное движение передается валу или принимается от него. Он используется для преобразования кругового движения в возвратно-поступательное или наоборот. Рычаг может быть изогнутой частью вала или прикрепленным к нему отдельным рычагом или диском. К концу кривошипа шарниром прикреплен стержень, обычно называемый шатуном (шатуном). Конец стержня, прикрепленный к кривошипу, движется круговым движением, в то время как другой конец обычно вынужден двигаться линейным скользящим движением.
Он используется для преобразования кругового движения в возвратно-поступательное или наоборот. Рычаг может быть изогнутой частью вала или прикрепленным к нему отдельным рычагом или диском. К концу кривошипа шарниром прикреплен стержень, обычно называемый шатуном (шатуном). Конец стержня, прикрепленный к кривошипу, движется круговым движением, в то время как другой конец обычно вынужден двигаться линейным скользящим движением.
Этот термин часто относится к рукоятке с приводом от человека, которая используется для ручного поворота оси, например, в шатуне велосипеда или в скобе и дрели. В этом случае рука или нога человека служит шатуном, прикладывающим возвратно-поступательную силу к кривошипу. Обычно есть штанга, перпендикулярная другому концу руки, часто со свободно вращающейся ручкой или прикрепленной педалью.
Содержимое
- 1 Примеры
- 1.1 Рукоятки с ручным приводом
- 1.2 Кривошипные рукоятки с ножным приводом
- 1. 3 Двигатели
- 2 Механика
- 3 История
- 3.1 Хан Китай
- 3.2 Римская империя
- 3.3 Средневековый Ближний Восток
- 3.4 Средневековая Европа
- 3.5 Ренессанс Европа
- 3,6 20 век
- 4 Коленчатая ось
- 5 См. также
- 6.1 Библиография
 3 Двигатели
3 ДвигателиПримеры
Известные примеры включают:
Ручные рукоятки
- Механическая точилка для карандашей
- Рыболовная катушка и другие катушки для кабелей, проводов, канатов и т. д.
- Окно автомобиля с ручным управлением
- Столярная скоба представляет собой составной кривошип .
- Набор кривошипов, который приводит в движение ручной велосипед через рукоятки.
Шатуны с ножным приводом
- Кривошип, приводящий велосипед в движение с помощью педалей.
- Швейная машина с педалью
Двигатели
Почти во всех поршневых двигателях используются кривошипы (с шатунами) для преобразования возвратно-поступательного движения поршней во вращательное движение. Шатуны встроены в коленчатый вал.
Шатуны встроены в коленчатый вал.
Механика
Смещение конца шатуна примерно пропорционально косинусу угла поворота кривошипа при измерении его от верхней мертвой точки (ВМТ). Таким образом, возвратно-поступательное движение, создаваемое постоянно вращающимся кривошипом и шатуном, приблизительно представляет собой простое гармоническое движение:
- x=rcosα+l{\displaystyle x=r\cos\alpha +l}
где x — расстояние конца шатуна от оси кривошипа, l — расстояние длина шатуна, r — длина кривошипа, а α — угол кривошипа, измеренный от верхней мертвой точки (ВМТ). Технически возвратно-поступательное движение шатуна отличается от синусоидального движения из-за изменения угла шатуна во время цикла и выражается (см. Уравнения движения поршня) как:
9{2}\alpha }}}
Эта разница становится существенной в высокоскоростных двигателях, которым могут потребоваться уравновешивающие валы для снижения вибрации из-за этого «вторичного дисбаланса».
Механическое преимущество кривошипа, соотношение между силой, действующей на шатун, и крутящим моментом на валу, меняется на протяжении цикла кривошипа. Соотношение между ними примерно такое:
- τ = Frsin (α + β) {\ displaystyle \ tau = Fr \ sin (\ alpha + \ beta) \,}
, где τ {\ displaystyle \ tau \,} — крутящий момент, а 9{2}\alpha }}}}
Например, для длины штока 6 дюймов и радиуса кривошипа 2 дюйма численное решение приведенного выше уравнения находит минимум скорости (максимальная скорость движения вниз) при угле кривошипа 73,17615° после ВМТ. . Затем, используя закон синусов треугольника, обнаруживается, что угол между кривошипом и шатуном составляет 88,21738 °, а угол шатуна составляет 18,60647 ° от вертикали (см. Уравнения движения поршня # Пример).
Когда кривошип приводится в движение шатуном, проблема возникает, когда кривошип находится в верхней мертвой точке (0°) или нижней мертвой точке (180°). В эти моменты цикла кривошипа сила, действующая на шатун, не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и находится в одной из этих двух точек, он не может быть приведен в движение шатуном. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, шатуны крепятся к колесам в точках, отстоящих друг от друга на некоторый угол, так что независимо от положения колес при запуске двигателя хотя бы один шатун будет быть в состоянии приложить крутящий момент, чтобы начать поезд.
Следовательно, если кривошип неподвижен и находится в одной из этих двух точек, он не может быть приведен в движение шатуном. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, шатуны крепятся к колесам в точках, отстоящих друг от друга на некоторый угол, так что независимо от положения колес при запуске двигателя хотя бы один шатун будет быть в состоянии приложить крутящий момент, чтобы начать поезд.
История
Эксцентрично установленная рукоятка вращающейся ручной мельницы, которая появилась в 5 веке до н.э. в кельтиберской Испании и в конечном итоге распространилась по всей Римской империи, представляет собой кривошип. [3] [1] [2]
Хань Китай
Первые рукоятки с ручным приводом появились в Китае во времена династии Хань (202 г. изображение, и впоследствии использовался в Китае для наматывания шелка и конопли, для сельскохозяйственного веялки, в водяном сите для муки, для металлургических мехов с гидравлическим приводом и в брашпиле колодца. [4] Однако потенциал кривошипа по преобразованию кругового движения в возвратно-поступательное, похоже, так и не был полностью реализован в Китае, и кривошип, как правило, отсутствовал в таких машинах до начала 20-го века. [5]
[4] Однако потенциал кривошипа по преобразованию кругового движения в возвратно-поступательное, похоже, так и не был полностью реализован в Китае, и кривошип, как правило, отсутствовал в таких машинах до начала 20-го века. [5]
Римская империя
См. также: Римские технологии и Список римских водяных мельниц
Римская кривошипная рукоятка из Августы Раурики, датируемая II веком. [6]
Римская железная рукоятка неизвестного назначения, датируемая II веком нашей эры, была раскопана в Августе Раурике, Швейцария. На одном конце куска длиной 82,5 см установлена бронзовая ручка длиной 15 см, другая ручка утеряна. [6] [7]
А ок. Настоящая железная рукоятка длиной 40 см вместе с парой разбитых жерновов диаметром 50–65 см и различными железными изделиями была раскопана в Ашхайме, недалеко от Мюнхена. Римская мельница с кривошипным приводом датируется концом 2 века. [8] Часто цитируемая современная реконструкция ковшового цепного насоса с приводом от ручных маховиков кораблей Неми была отвергнута как «археологическая фантазия». [9]
[8] Часто цитируемая современная реконструкция ковшового цепного насоса с приводом от ручных маховиков кораблей Неми была отвергнута как «археологическая фантазия». [9]
Доказательства наличия кривошипа в сочетании с шатуном появляются на лесопилке Иераполиса в Малой Азии 3 века и двух каменных лесопилках в Герасе, Римская Сирия, и Эфесе, Малая Азия (оба 6 век). [10] На фронтоне мельницы Иераполиса показано водяное колесо, приводимое в движение мельничной дорожкой, приводящее в действие через зубчатую передачу две рамные пилы, которые разрезают прямоугольные блоки с помощью каких-то шатунов и, по механической необходимости, кривошипов. . Сопроводительная надпись на греческом языке. [11]
Кривошипно-шатунные механизмы двух других археологически засвидетельствованных лесопилок работали без зубчатой передачи. [12] [13] В древней литературе есть упоминание о работах поэта Авзония конца 4-го века с водяными мраморными пилами недалеко от Трира, ныне Германия; [10] примерно в то же время, эти типы мельниц, по-видимому, также указаны христианским святым Григорием Нисским из Анатолии, демонстрируя разнообразное использование гидроэнергии во многих частях Римской империи [14] Три находит сдвиг даты изобретения кривошипно-шатунного механизма на целое тысячелетие. [10] По словам Туллии Ритти, Клауса Греве и Пола Кессенера:
[10] По словам Туллии Ритти, Клауса Греве и Пола Кессенера:
С кривошипно-шатунной системой, все элементы для построения паровой машины (изобретена в 1712 г.) — эолипил Героя (производящий силу пара), цилиндр и поршень (в металлических силовых насосах), обратные клапаны (в водяных насосах ), зубчатые передачи (в водяных мельницах и часах) — были известны еще во времена Римской империи. [15]
Средневековый Ближний Восток
Кривошип появляется в середине 9-го века в нескольких гидравлических устройствах, описанных братьями Бану Муса в их Книге гениальных устройств . [16] Эти устройства, однако, совершали только частичные вращения и не могли передавать большую мощность, [17] , хотя для преобразования их в коленчатый вал потребовалась бы лишь небольшая модификация. [18]
Аль-Джазари (1136–1206) описал кривошипно-шатунную систему во вращающейся машине двух своих водоподъемных машин.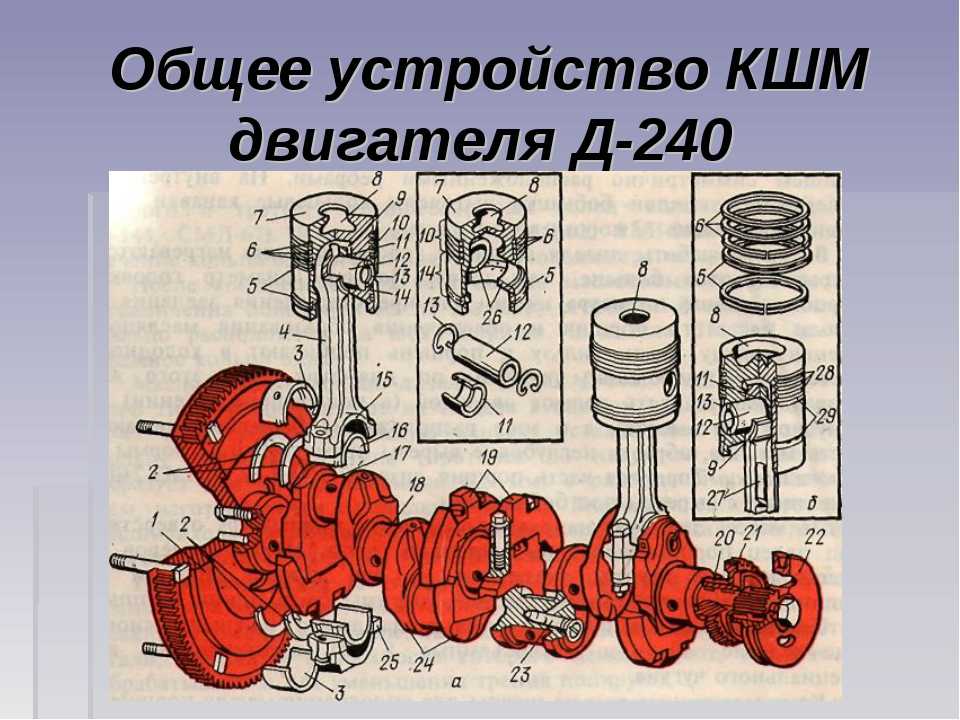 [19] Его двухцилиндровый насос с коленчатым валом, [20] с кривошипно-шатунным механизмом и валом. [21]
[19] Его двухцилиндровый насос с коленчатым валом, [20] с кривошипно-шатунным механизмом и валом. [21]
Средневековая Европа
См. также: Средневековые технологии
Кривошип стал обычным явлением в Европе к началу 15 века, что можно увидеть в работах таких людей, как военный инженер Конрад Кайзер (1366–после 1405). [22] Вращающийся точильный камень — самое раннее его изображение — [23] , который приводится в действие кривошипной рукояткой, показан в каролингской рукописи Утрехтская псалтирь ; рисунок пером около 830 года восходит к позднему античному оригиналу. [24] В музыкальном трактате, приписываемом аббату Одо из Клюни (ок. 878−942 гг.), описывается ладовый струнный инструмент, звук которого звучал с помощью колеса из смолы, вращаемого рукояткой; позже это устройство появляется в двух иллюминированных рукописях XII века. [23] Есть также две фотографии Фортуны, крутящей колесо судьбы из этого и следующего веков. [23]
[23]
Использование кривошипных рукояток в трепанационных сверлах было описано в 9-м издании 1887 г.0069 Dictionnaire des Antiquités Grecques et Romaines за заслуги испанского хирурга-мусульманина Абу аль-Касима аль-Захрави; однако существование такого устройства не может быть подтверждено оригинальным освещением, и поэтому его следует не принимать во внимание. [25] Монах-бенедиктинец Феофил Пресвитер (ок. 1070–1125) описал кривошипные рукоятки, «используемые при токарной обработке литейных стержней». [26]
Итальянский врач Гвидо да Виджевано (ок. 1280–1349 гг.), планируя новый крестовый поход, нарисовал гребную лодку и военные повозки, которые приводились в движение составными кривошипами и зубчатыми колесами, вращаемыми вручную (в центре изображение). [27] Псалтирь Латтрелла , датируемая примерно 1340 годом, описывает точильный камень, который вращался с помощью двух кривошипов, по одному на каждом конце его оси; зубчатая ручная мельница с одним или двумя кривошипами появилась позже, в 15 веке; [28]
Средневековые подъемные краны иногда приводились в движение рукоятками, хотя чаще лебедками. [29]
[29]
Ренессанс Европа
См. также: Технологии эпохи Возрождения
Лодка с гребным колесом 15 века, весла которой вращаются одноходовыми коленчатыми валами (Аноним гуситских войн)
Кривошип стал обычным явлением в Европе к началу 15 века, его часто можно увидеть в работах таких специалистов, как немецкий военный инженер Конрад Кайзер. [28] Устройства, изображенные в Bellifortis компании Kyeser, включают кривошипные лебедки (вместо спицованных колес) для натягивания осадных арбалетов, кривошипную цепь ковшей для подъема воды и кривошипы, прикрепленные к колесу колоколов. [28] Kieser также оснастил винты Архимеда для подъема воды кривошипной рукояткой, нововведение, которое впоследствии заменило древнюю практику работы с трубой путем наступания. [30] Самое раннее свидетельство оснащения колодезного подъемника кривошипами находится на миниатюре ок. 1425 в немецком Hausbuch Фонда Менделя . [31]
[31]
Первые изображения сложной рукоятки плотницкой скобы появляются между 1420 и 1430 годами в различных северноевропейских произведениях искусства. [32] Быстрое внедрение составного кривошипа можно проследить в работах Анонима гуситских войн, неизвестного немецкого инженера, пишущего о состоянии военной техники своего времени: во-первых, шатун, примененный к кривошипам, снова появились, во-вторых, кривошипы с двойным составом также стали оснащаться шатунами и, в-третьих, для этих кривошипов использовался маховик, чтобы вывести их из «мертвой точки».
На одном из рисунков Анонимуса гуситских войн изображена лодка с парой гребных колес на каждом конце, вращаемых людьми, управляющими сложными рукоятками (см. выше). Эта концепция была значительно улучшена итальянцем Роберто Вальтурио в 1463 году, который изобрел лодку с пятью комплектами, в которой все параллельные кривошипы соединены с единым источником энергии одним шатуном. Эту идею также подхватил его соотечественник Франческо ди Джорджио. . [33]
. [33]
Водоподъемный насос с кривошипно-шатунным механизмом (Георг Андреас Бёклер, 1661 г.)
В Италии эпохи Возрождения самые ранние свидетельства существования сложной кривошипной рукоятки и шатуна можно найти в альбомах Такколы, но это устройство до сих пор не понимается с точки зрения механики. [34] Четкое понимание движения кривошипа демонстрирует чуть позже Пизанелло, нарисовавший привод поршневого насоса.
водяным колесом и приводился в действие двумя простыми кривошипами и двумя шатунами. [34]
В 15 веке также были введены кривошипно-реечные устройства, называемые кранкинами, которые устанавливались на приклад арбалета как средство приложения еще большей силы при натягивании стрелкового оружия (см. справа). . [35] В текстильной промышленности внедрены кривошипные катушки для намотки мотков пряжи. [28]
Около 1480 года раннесредневековый вращающийся точильный камень был усовершенствован с помощью педали и кривошипного механизма. Кривошипы, установленные на тележках, впервые появляются на немецкой гравюре 1589 года. 9Только 0069 Разнообразные и искусственные машины 1588 года изображает восемнадцать экземпляров, число которых увеличивается в Theatrum Machinarum Novum Георга Андреаса Бёклера до 45 различных машин, что составляет одну треть от общего числа. [37]
Кривошипы, установленные на тележках, впервые появляются на немецкой гравюре 1589 года. 9Только 0069 Разнообразные и искусственные машины 1588 года изображает восемнадцать экземпляров, число которых увеличивается в Theatrum Machinarum Novum Георга Андреаса Бёклера до 45 различных машин, что составляет одну треть от общего числа. [37]
20 век
В начале 20 века на некоторых машинах использовались шатуны; например, почти все фонографы до 1930-х годов приводились в действие заводными двигателями с заводными рукоятками. В поршневых двигателях используются кривошипы для преобразования линейного движения поршня во вращательное движение. Двигатели внутреннего сгорания автомобилей начала 20-го века обычно запускались с помощью рукоятки (известной как пусковые рукоятки в Великобритании), до того, как электрические стартеры стали широко использоваться.
В руководстве по эксплуатации Reo 1918 года описывается, как проворачивать автомобиль вручную:
- Первое: Убедитесь, что рычаг переключения передач находится в нейтральном положении.
- Секунда: педаль сцепления разблокирована, а сцепление включено. Педаль тормоза максимально выдвинута вперед, тормозя заднее колесо.
- В-третьих: обратите внимание на то, чтобы рычаг управления искрой, который является коротким рычагом, расположенным в верхней части рулевого колеса с правой стороны, был максимально отведен назад к водителю, а длинный рычаг наверху рулевой колонки управляет карбюратором. толкается вперед примерно на один дюйм от своего запаздывающего положения.
- Четвертое: Поверните ключ зажигания в положение с меткой «В» или «М»
- Пятое: Установите регулятор карбюратора на рулевой колонке в положение с пометкой «СТАРТ». Убедитесь, что в карбюраторе есть бензин. Проверьте это, нажимая на маленький штифт, выступающий из передней части чаши, пока карбюратор не заполнится. Если он не заливает, это показывает, что топливо не подается в карбюратор должным образом, и нельзя ожидать, что двигатель запустится. См. инструкции на стр. 56 для заполнения вакуумного резервуара.
- Шестое: Убедившись, что в карбюраторе есть запас топлива, возьмитесь за рукоятку пусковой рукоятки, нажмите на нее до упора, чтобы храповик зацепился со штифтом коленчатого вала, и переверните двигатель, быстро потянув вверх. Никогда не нажимайте вниз, потому что, если по какой-либо причине двигатель даст обратный ход, это может представлять опасность для оператора.


Коленчатая ось
Коленчатая ось представляет собой коленчатый вал, который также служит в качестве оси. Используется на паровозах с внутренними цилиндрами.
См. также
- Ничего шлифовального станка
- Уравнения движения поршня
- Солнечная и планетарная шестерни
- Лебедка
- Джеймс Пикард
- Коленчатый вал
В этой статье используется материал из статьи Википедии
«Кривошип (механизм)», который выпускается под
Лицензия Creative Commons Attribution-Share-Alike 3.0. есть список всех
авторы в Википедии
Кривошипно-ползунковый механизм: Новое в системе Mathematica 9
Х
\!\(\*
GraphicsBox[{GraphicsGroupBox[GeometricTransformationBox[
{Оттенок[0,05, 0,3, 0,9], EdgeForm[{GrayLevel[0], AbsoluteThickness[
0,5]}], RectangleBox[{0,7140365793403993, -0,06}, \
{0,9940365793403994, 0,06}],
{Уровень серого[0,7], EdgeForm[Нет],
RectangleBox[{0. 20999999999999996`, -0.11000000000000001`}, \
20999999999999996`, -0.11000000000000001`}, \
{1,19, -0,06}],
{Уровень серого[0], Абсолютная толщина[0,5],
LineBox[{{0.20999999999999996`, -0.06}, {1.19, -0.06}}],
{Уровень серого[0,7], EdgeForm[Нет],
ПрямоугольникЯщик[{0,20999999999999996`, 0.11000000000000001`}, \
{1,19, 0,06}],
{Уровень серого[0], Абсолютная толщина[0,5],
LineBox[{{0.20999999999999996`, 0.06}, {1.19,
0.06}}]}}}}}, {{{1, 0}, {0, 1}}, {0., 0.}}]],
GraphicsGroupBox[GeometricTransformationBox[
{Оттенок[0,6, 0,2, 0,7], EdgeForm[{GrayLevel[0], AbsoluteThickness[0,5]}],
PolygonBox[СжатыеДанные[»
1:eJxTTMoPSmViYGBQAmIQDQPVIuvch2Yt2c/88lzium/1+z1SfHYoiy3ZP29p
L0dJZP9+n6smcqdeL9pvbMJRO/ngtP3abanzvdkX7r/D8t+/99scOA0Th6mD
6YOZAzMXZg/MXpg70OTt0fTbo5lvj2a/PZr77NHcb4/mP3s0/9sbg8Flexj/
et6uN7ybL9vD1CcsKL/8T/cKzF32ZduYs33mX4G5y75R2ZhjDtNVmLvsfzyW
Xy4TctUe7t6zP8vWTLgKc5f9nv02q75vvQpzl/2hrxox/Yeuwt2FJr8fTf9+
NPP3o9m/H819+9Hcvx/Nf/vR/L8fAN4bAVc=
«]],
{Уровень серого[0], AbsolutePointSize[5], PointBox[{0, 0}],
PointBox[{0.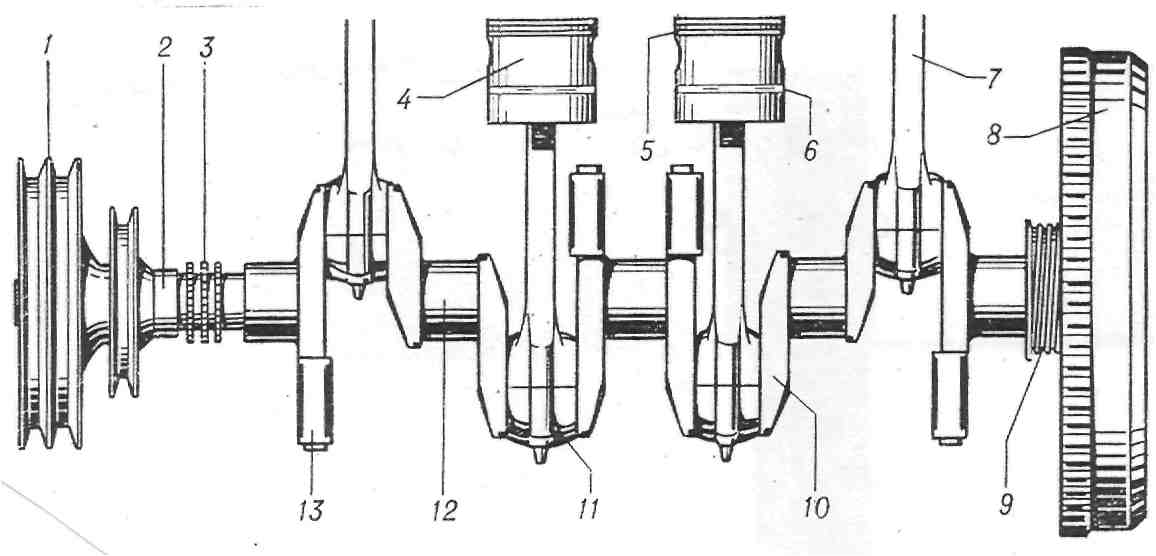 3, 0}]}}, {{{
3, 0}]}}, {{{
0,6427876096865393, -0,766044443118978}, {0,766044443118978,
0,6427876096865393}}, {0, 0}}]],
GraphicsGroupBox[GeometricTransformationBox[
{Уровень серого[0,85], EdgeForm[{Уровень серого[0], Абсолютная толщина[0,5]}],
PolygonBox[СжатыеДанные[»
1:eJxTTMoPSmViYGAQBmIQPWsmCKzcD6F37o9ImOJWHz5v/+SUvK0MlsX2ukxV
FxzZ5u6fZNEZqavYYr/10OfKaWdn7X/PMvFPBGufffqR/zON90/fz9P8L0Go
drJ9CF/s/PLPk/e3PK3IEo6Zbt/0cXqzr2D//j1H9++52DDLvu30scjPzq37
S/nmL7G5NMc+bYnwYqFZpftTjl0pvWE7z361wP/InI8Je3bItb4O3DHPPhQi
b58Kla+H6LevgOrvgJhvvwtqfhjEfvsmqP0pEPfZ80PdtwXifvvvUPdrQfxn
vwLqP6j/7Vuh/oeGjz0sfABj1Jnp
«]],
{Уровень серого[0,7], EdgeForm[Нет],
RectangleBox[{-0.1, -0.150000000000000002`}, {0.1, -0.1}],
{Уровень серого[0], Абсолютная толщина[0,5],
LineBox[{{-0.1, -0.1}, {0.1, -0.1}}],
{GrayLevel[0], AbsolutePointSize[5], PointBox[{0, 0}]}}}}, {{{1, 0}, {
0, 1}}, {0, 0}}]], GraphicsGroupBox[GeometricTransformationBox[
{Оттенок[0,6, 0,2, 0,9], EdgeForm[{GrayLevel[0], AbsoluteThickness[0. 5]}],
5]}],
PolygonBox[{{0.192836282178`, 0.14981333293569338`}, {
0,192836282178`, 0,3098133329356934}, {
0,89283628217, 0,2778133329356934}, {0,89283628217,
0,1818133329356934}}],
{RGBColor[0,8600000000000001, 0,8960000000000001, 0,95],
DiskBox[{0.192836282178`, 0.2298133329356934}, 0.08],
DiskBox[{0,89283628217, 0,2298133329356934}, 0,048]},
{Уровень серого[0,5],
Дискбокс[{0,192836282178`, 0,2298133329356934}, 0,032],
DiskBox[{0.89283628217, 0.2298133329356934},
0,0192]}}, {{{0,94457185204
,
0,32830476133670483`}, {-0,32830476133670483`,
0,94457185204
}}, {-0,06476025340225089,
0,07604719725552594}}]],
{Уровень серого[0], Абсолютная толщина[0,5], Наконечники стрелок[Средний],
Стрелка[{{-0,25, 0}, {0,5, 0}}],
Стрелка[{{0, -0,05}, {0, 0,6}}], {
GraphicsGroupBox[GeometricTransformationBox[
{Уровень серого[0], Абсолютная толщина[0,5],
LineBox[{{0, 0,07}, {0, 0,17}}],
{Наконечники стрел[{-Маленькие, Маленькие}],
ArrowBox[{{0, 0. 12000000000000001`}, {0.3,
12000000000000001`}, {0.3,
0,12000000000000001`}}],
LineBox[{{0.3, 0.07}, {0.3, 0.17}}], InsetBox[
StyleBox[«\<\"\\!\\(\\*SubscriptBox[\\(l\\), \\(1\\)]\\)\"\>«,
StripOnInput-> Ложь,
Размер шрифта->12], {0,15, 0,12000000000000001`},
Фон->Уровень серого[1]]}}, {{{
0,6427876096865393, -0,766044443118978}, {0,766044443118978,
0,6427876096865393}}, {0, 0}}]],
GraphicsGroupBox[GeometricTransformationBox[
{Уровень серого[0], Абсолютная толщина[0,5],
LineBox[{{0.192836282178`, 0.4298133329356934}, {
0,192836282178`, 0,5298133329356934}}],
{Наконечники стрел[{-Маленькие, Маленькие}],
ArrowBox[{{0.192836282178`, 0.4798133329356934}, {
0,89283628217, 0,4798133329356934}}],
LineBox[{{0,89283628217, 0,4298133329356934}, {
0.89283628217, 0.5298133329356934}}], InsetBox[
StyleBox[«\<\"\\!\\(\\*SubscriptBox[\\(l\\), \\(2\\)]\\)\"\>«,
StripOnInput-> Ложь,
Размер шрифта->12], {0,54283628218, 0,4798133329356934},
Background->GrayLevel[1]]}}, {{{0. 94457185204
94457185204
,
0,32830476133670483`}, {-0,32830476133670483`,
0,94457185204
}}, {-0,06476025340225089,
0,07604719725552594}}]],
GraphicsGroupBox[GeometricTransformationBox[
{Уровень серого[0], Абсолютная толщина[0,5],
LineBox[{{0, -0,35}, {0, -0,24999999999999997`}}],
{Наконечники стрел[{-Маленькие, Маленькие}],
Стрелка[{{0, -0,3}, {0,8540365793403993, -0,3}}],
LineBox[{{0.8540365793403993, -0.35}, {
0.8540365793403993, -0.24999999999999997`}}], InsetBox[
StyleBox[«\<\"\\!\\(\\*SubscriptBox[\\(z\\), \\(3\\)]\\)\"\>«,
StripOnInput-> Ложь,
Размер шрифта->12], {0,42701828967019967`, -0,3},
Background->GrayLevel[1]]}}, {{{1, 0}, {0, 1}}, {0., 0.}}]],
{Уровень серого[0], Абсолютная толщина[0,5],
ГеометрическаяПреобразование[
LineBox[{{0, 0}, {-0.25, 0}}], {{{
0,6427876096865393, -0,766044443118978}, {0,766044443118978,
0,6427876096865393}}, {0, 0}}],
CircleBox[{0, 0}, 0,2,
NCache[{Pi, Rational[23, 18] Pi}, {3. 141592653589793,
141592653589793,
4.014257279586958}]],
ГеометрическаяПреобразование[
LineBox[{
Смещение[{-3, 6}, {-0,2, 0}], Смещение[{0, 0}, {-0,2, 0}],
Смещение[{3, 6}, {-0,2, 0}]}], {{{
0,6427876096865393, -0,766044443118978}, {0,766044443118978,
0,6427876096865393}}, {0, 0}}],
{Уровень серого[0], InsetBox[
StyleBox[«\<\"\\!\\(\\*SubscriptBox[\\(\[Alpha]\\), \\(1\\)]\\)\"\>«,
StripOnInput-> Ложь,
Размер шрифта->12], {-0,2, -0,08}, {-1, 0},
Фон->Уровень серого[1]],
LineBox[{{0,192836282178`, 0,2298133329356934}, {
0,39283628218, 0,2298133329356934}}],
ГеометрическаяПреобразование[
LineBox[{{0.192836282178`, 0.2298133329356934}, {
0,39283628218, 0,2298133329356934}}], {{{
0,94457185204
,
0,32830476133670483`}, {-0,32830476133670483`,
0,94457185204
}}, {-0,06476025340225089,
0,07604719725552594}}],
CircleBox[{0. 192836282178`, 0.2298133329356934}, 0.15, {
192836282178`, 0.2298133329356934}, 0.15, {
0, 5,948677009576}],
ГеометрическаяПреобразование[
LineBox[{
Смещение[{-3, -6}, {0,34283628218, 0,2298133329356934}],
Смещение [{0, 0}, {0,34283628218, 0,2298133329356934}],
Смещение [{3, -6}, {0,34283628218,
0,2298133329356934}]}], {{{0,94457185204,
0,3283047613367053}, {-0,3283047613367053,
0,94457185204}}, {-0,06476025340225089,
0,07604719725552606}}]},
{Уровень серого[0], InsetBox[
StyleBox[«\<\"\\!\\(\\*SubscriptBox[\\(\[Alpha]\\), \\(2\\)]\\)\"\>«,
StripOnInput-> Ложь,
Размер шрифта->12], {0,192836282178`, 0,3798133329356934}, {-1, 0},
Фон->Уровень серого[1]]}}}},
{Оттенок[0, 1, 0,8], Абсолютная толщина[2], Непрозрачность[1], Наконечники стрелок[Средний],
ArrowBox[{{1.2040365793403993`, 0}, {1.0040365793403994`, 0}}],
{Уровень серого[0], InsetBox[
StyleBox[«\<\"F(t)\"\>«,
StripOnInput-> Ложь,
Размер шрифта->12,
FontSlant-> Курсив], {1. 2240365793403993`, 0}, {-1, 0}]}}},
2240365793403993`, 0}, {-1, 0}]}}},
Размер изображения-> {470.6796875, автоматически},
PlotRange->{{-0.5, 1.5}, {-0.47, 0.6}}]\)
Динамическое моделирование и расчет кривошипно-ползункового механизма многопараметрической модели трения в беспроводной связи
На этой странице
РезюмеВведениеРезультаты и обсуждениеЗаключениеДоступность данныхКонфликты интересовБлагодарностиСсылкиАвторское правоСтатьи по теме
В этой исследовательской работе анализируется передовой кривошипно-шатунный механизм на основе беспроводной связи для многопараметрических методов трения. Более ранние модели не могут найти точное трение; следовательно, правильная функция кривошипа не может быть идентифицирована. Динамический кривошипно-шатунный механизм необходим для сложных механических применений. Доступные модели не подходят для будущих механических выставок. В этой работе реализован кривошипный ползун на основе SVM с динамической моделью трения. Математический метод SVM постоянно уравновешивает динамическое моделирование с балансировкой трения.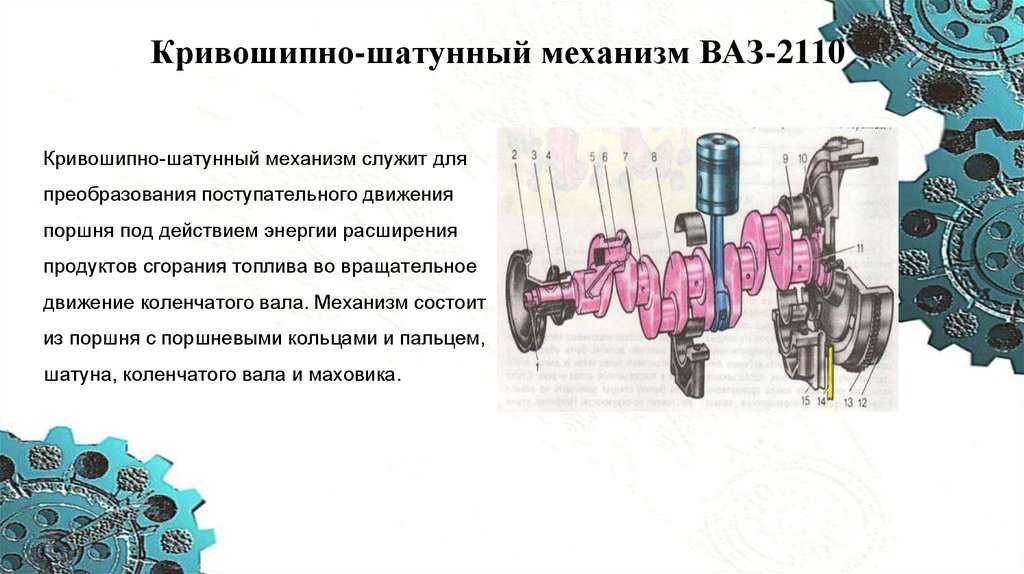 Наконец, методы «контролер/наблюдатель» показали эффективные численные результаты. Переменные системы анализируются, отмечая ошибки и сделанные оценки. Производительность измеряет точность 98,45%, чувствительность 97,34%, кривошипный ползунок 96,34% и полнота 97,34%.
Наконец, методы «контролер/наблюдатель» показали эффективные численные результаты. Переменные системы анализируются, отмечая ошибки и сделанные оценки. Производительность измеряет точность 98,45%, чувствительность 97,34%, кривошипный ползунок 96,34% и полнота 97,34%.
1. Введение
На основе адаптивной саморекурсивной вейвлетной нейронной сети (SRWNN) и контроллера/наблюдателя с скользящим режимом кривошипно-ползунковым механизмом теперь можно управлять новым способом [1]. В качестве цели, есть надежда, что ошибки отслеживания будут уменьшены. Движение этого устройства происходит по заданной траектории. Дизайн инициатора представляет собой двухэтапный процесс. Один из них представляет собой подход скользящего режима, а другой — стратегию нескользящего режима. Еще одним компонентом контроллера является адаптивная SRWNN. В этом режиме контроллера веса SRWNN сначала обучаются в автономном режиме, а затем обновляются в режиме онлайн. Это известно как адаптивное управление. Кроме того, в этом исследовании предлагается использовать гибридный метод управления. Использование датчиков скорости было прекращено в пользу наблюдателя скорости. Начинаются исследования, за которыми следует разработка уравнений динамики кривошипно-кривошипного механизма, рекомендуемого наблюдателя и методов управления.
Кроме того, в этом исследовании предлагается использовать гибридный метод управления. Использование датчиков скорости было прекращено в пользу наблюдателя скорости. Начинаются исследования, за которыми следует разработка уравнений динамики кривошипно-кривошипного механизма, рекомендуемого наблюдателя и методов управления.
В механической трансмиссии ползунково-кривошипный механизм является обычным механизмом трансмиссии. Трудно анализировать движение механизмов, поэтому мы не смогли получить производительность после того, как завершили проектирование и проверили его. Кривошипный ползун — это устройство, используемое в различных отраслях и секторах, таких как бензиновые и дизельные двигатели, для преобразования линейного смещения силы в круговое движение; иначе наоборот. Даже если в литературе используются некоторые общепринятые методологии, основная цель этого исследования состоит в том, чтобы улучшить ранее описанные исследования. Как известно, нейронные сети с вейвлетами использовались во множестве приложений. В данной работе предлагается рассмотрение различных методов контроля. Контроллер скользящего режима (SMC) и SRWNN будут использоваться для стабилизации этой механической системы в соответствии с основной целью этого исследования. Рассмотрена замкнутая механическая система кривошип-ползун.
В данной работе предлагается рассмотрение различных методов контроля. Контроллер скользящего режима (SMC) и SRWNN будут использоваться для стабилизации этой механической системы в соответствии с основной целью этого исследования. Рассмотрена замкнутая механическая система кривошип-ползун.
В этом исследовании предоставляется наблюдатель, которому не нужны датчики для предсказания скоростей. Для кривошипно-ползункового механизма рекомендуются контроллер скользящего режима и адаптивная самовозвратная вейвлетная нейронная сеть. Было продемонстрировано, что другие стратегии контроллера нейронной сети уступают управлению в скользящем режиме, а также саморекуррентной сети вейвлетов. Следуя принципу разделения, можно построить наблюдатель и контроллер независимо друг от друга. Саморекуррентный вейвлет-контроллер нейронной сети более эффективен, чем существующие системы управления нейронными сетями, поскольку он имеет входной слой, материнский вейвлетный слой, выходной слой и выходной слой. Целью статьи является анализ усовершенствованного кривошипного ползункового механизма на основе беспроводной связи для многопараметрических методов трения.
Целью статьи является анализ усовершенствованного кривошипного ползункового механизма на основе беспроводной связи для многопараметрических методов трения.
2. Обзор литературы
По данным Azar et al., результаты численных экспериментов показывают, что нисходящий режим и контроллеры SRWNN обеспечивают минимальную ошибку отслеживания линейных и угловых перемещений по сравнению с другими методами, обнаруженными в литературе [2].
Григореску и др. обнаружили, что кривошипно-ползунковый базовый механизм используется для управления другой цепью зубчатой передачи с линейными приводами в этом исследовании, как показано на рисунке. С помощью этой конструкции можно достичь широкого диапазона углов поворота и углов передачи благодаря линейному приводу и зубчатой передаче. Использование этих особенностей и непроизвольного перемещения ближайшего компонента к подвижным платформам позволяет избежать сингулярностей первого порядка [3].
Лупуци и др. заявляют, что, используя кривошипно-ползунковый механизм в качестве основы, плоскопараллельный манипулятор приводится в действие зубчатой передачей с линейным приводом и показан в этой статье. Используя линейные приводы ползункового кривошипа, статья иллюстрирует ходы привода ползункового кривошипа. Ротация мобильной платформы также учитывается в двух разных ситуациях [4].
Используя линейные приводы ползункового кривошипа, статья иллюстрирует ходы привода ползункового кривошипа. Ротация мобильной платформы также учитывается в двух разных ситуациях [4].
Находки Хуанга описывают робота линии электропередачи, который можно использовать для удаления птичьих гнезд, пока электрики выполняют свою работу. Чтобы избежать риска опасной эксплуатации линии электропередач, эта процедура является безопасной, быстрой и эффективной [5].
Сингх и др. заявляют, что с использованием носимых датчиков в этом исследовании предлагается инновационный и экономически эффективный метод определения цикла походки при различных двигательных действиях. Используя резистор, чувствительный к силе (FSR), было построено беспроводное устройство для контроля угла колена. И ползун-кривошип в сборе, и блок беспроводной обработки сигналов являются частью системы измерения угла колена. Кривошипно-ползунковый механизм с четырьмя стержнями используется для преобразования кругового движения в возвратно-поступательное линейное движение путем измерения силы, создаваемой при ходьбе. Угол колена отслеживается в режиме реального времени для расчета углов суставов в режиме реального времени на блоке обработки сигналов. Используя этот метод, угол колена может быть измерен простым и эффективным способом [6].
Угол колена отслеживается в режиме реального времени для расчета углов суставов в режиме реального времени на блоке обработки сигналов. Используя этот метод, угол колена может быть измерен простым и эффективным способом [6].
Ян и др. использовали совместную систему рабочих механизмов с несколькими манипуляторами и шестью степенями свободы для создания высокопроизводительного рабочего конца под напряжением для нарезки, зажима, затягивания и ослабления изоляционных проводов. Отдельные и связанные оптимизирующие роботы с распределением энергии могут эффективно заменить человеческую работу и повысить системный интеллект [7].
В этот корпус включены все четыре секции робота: электроподвижная изолирующая платформа, корпус робота и рабочий конец. По завершении процесса есть два конца: конец для зачистки провода и конец для крепления зажима. Было показано, что использование робота для зарядки и отсоединения кабелей является экономически эффективной и экономящей время альтернативой традиционному процессу [8].
По словам Фэна и др., на сегодняшний день это первое исследование, описывающее совершенно новый тип ротора сборщика энергии: такой, который подвешивается и приводится в действие всего двумя тонкими нитями. Вместо преобразования механического движения в высокочастотные колебательные колебания комбайн может преобразовывать вибрации или прямолинейные возвратно-поступательные движения либо в быстрое вращение, либо в высокочастотные малокрутильные колебания ротора [9].
Патра заявляет, что вместо того, чтобы пытаться напрямую сопоставить траекторию стопы, здесь мы стремились сопоставить несколько геометрических особенностей области, окруженной траекторией стопы. Используя размеры связи, нейронные сети обучаются прогнозировать геометрические аспекты связи в качестве выходных данных. «Наилучшие размеры» для намеченной траектории были предсказаны с использованием той же обученной сети [10].
Согласно экспериментальному исследованию, проведенному Терницким и др., на значение крутящего момента влияет скорость вращения ведущего вала в механизме нажимного диска. В этой статье показано, что система передачи винт-гайка может использоваться для привода подвижной прижимной пластины [11].
В этой статье показано, что система передачи винт-гайка может использоваться для привода подвижной прижимной пластины [11].
Чен и Яо заявляют, что аналитическое моделирование механизмов может быть легко выполнено, а сложность анализа уменьшена за счет использования программного обеспечения MATLAB для аналитического моделирования, которое имеет мощные функции. Можно повысить степень эффективности проектирования и снизить затраты на проектирование [12].
Ю и Вэй предложили и внедрили усовершенствованную модульную систему взмахов ползуна-кривошипа, которая полностью использует непрерывное высокоскоростное вращение двигателя постоянного тока для увеличения скорости плавания. Соответственно, робот-дельфин, построенный с использованием предложенных механизмов, достиг больших скоростей движения, что доказывает жизнеспособность конструкции [13].
В результате исследований Вэя и Ю был разработан новый механизм взмахов, основанный на ползунковых кривошипах и непрерывном вращении двигателя постоянного тока. Прототип робота был разработан для оценки эффективности разработанных дизайнерских идей [14].
Прототип робота был разработан для оценки эффективности разработанных дизайнерских идей [14].
Используя динамический анализ, Chang et al. было определено, где должен располагаться механический переключатель пускового механизма сцепления, и результаты были подтверждены моделированием и тестированием. Будущие исследования должны быть сосредоточены на создании системы передвижения ног с двумя степенями свободы, ударным ползунково-кривошипным механизмом и дополнительным приводом качания [15].
Согласно исследованиям Розена и др., для будущих изменений, испытательные наборы транспортного средства и реальный автомобиль создали мощную среду разработки. Используя бортовые датчики и внешнюю арену захвата движения, транспортное средство успешно летало и продемонстрировало, что эта платформа подходит для исследований энергетики и управления полетом в масштабе насекомых [16].
Сайке и Цзянтао заявляют, что ускорение ползунка и угловое ускорение звена можно снизить, увеличив набор звеньев и длину звеньев. По результатам моделирования было выбрано лучшее проектное предложение из других. MSGC может минимизировать количество времени и усилий, необходимых для анализа данных, одновременно повышая точность и эффективность процесса [17].
По результатам моделирования было выбрано лучшее проектное предложение из других. MSGC может минимизировать количество времени и усилий, необходимых для анализа данных, одновременно повышая точность и эффективность процесса [17].
Исследование, проведенное Cai et al. о структурных характеристиках и скользящих движениях в двухкривошипно-ползунковом механизме, а также о последствиях этого для робота, ползающего по кабелю, представлены в этой статье, которая завершает полезное исследование возможности использования реверсивного механизма. двухкривошипно-ползункового механизма в роботе, передвигающемся по кабелю. При попытке решения задачи синтеза выбора канатной связи высотного шагающего робота она имеет особое эталонное значение [18].
Ван и др. заявляют, что безопасность пациентов является главным соображением при разработке устройства, которое не имеет функций быстрого возврата. Также разрабатывается система дистанционного мониторинга медицинской безопасности, чтобы гарантировать, что пациенты смогут пройти реабилитацию в соответствии с назначением. Согласно результатам моделирования и реальных экспериментов, предлагаемый подход к реабилитации является эффективным и действенным [19].
Согласно результатам моделирования и реальных экспериментов, предлагаемый подход к реабилитации является эффективным и действенным [19].
В качестве альтернативы датчикам скорости Azar et al. вместо этого предложите использовать наблюдатель скорости. Результаты численного эксперимента показывают, что скользящий режим и регуляторы SRWNN обеспечивают минимальную ошибку слежения за линейными и угловыми перемещениями по сравнению с другими методами, обнаруженными в литературе [2].
Выводы De Groote et al. показать, что рекуррентная реализация модели NNAP превосходит реализацию с прямой связью с точки зрения предсказания состояния системы. Удалив нейронную сеть из модели, можно получить новое представление о динамике системы. Для получения точных оценок взаимодействия неизвестной силы пружины и трения на скользящем механизме мы использовали этот метод испытаний [20].
Количество переходов в системе связи значительно больше в системе связи, и большая часть связности трафика не оптимизирована в существующих методах. Для преодоления этих ограничений и разработан предлагаемый метод.
3. Методология
В этом разделе дается краткое описание кривошипно-ползункового механизма многопараметрического фрикционного механизма. Связь между модулями и их кривошипами осуществляется предлагаемым беспроводным способом. Для корреляции и передачи сигналов одной и той же трансляции эти антенны использовали ресурсы многополосного мультиплексирования сотовой сети (CNM). Эти беспроводные модемы обеспечивают направленное усиление, которое поможет создать сфокусированную поверхность между отправителем и получателем. Расположение этого соединения, как и многих других, определяется параметрами чипа, количеством кратких и средних звеньев, решением трещин. Целью внедрения беспроводных сетей является сокращение числа переходов в системе связи и оптимизация соединения трафика между поверхностями, показанными на рис. 1.9.0003
Машины опорных векторов (SVM) для заданного набора точек можно быстро идентифицировать с помощью итеративного подхода. Опорные векторы учитываются как кандидаты в набор опорных векторов-кандидатов нашего алгоритма [21, 22]. Он использует жадную стратегию для включения кандидатов в набор кандидатов. Бывают случаи, когда нам приходится удалять точки, которые уже находятся в наборе кандидатов, потому что они не позволяют нам добавлять новые. Для более быстрой сходимости начнем с пары точек из двух отдельных классов. Затем используются методы, основанные на оптимизации, для увеличения или уменьшения количества возможных опорных векторов. Для соблюдения ограничений KKT алгоритм итеративно просматривает данные. Как правило, наша методика требует O (| S |2) объем памяти, где | С | размер вектора. Это демонстрирует, что метод превосходит другие итерационные алгоритмы, такие как SMO и NPA, с точки зрения производительности. Используя ряд реальных наборов данных, мы подтверждаем обнаружение кривошипа.
В условиях канала AWGN результаты BLER разработанного подхода SVC и конкурирующих систем проанализированы на рисунке 1. В точке 10–5 BLER предлагаемая методология SVC превосходит обе. Классический PDCCH был заменен схемой на основе полярного кода, что дало усиление более чем на 4 дБ по сравнению с исходным PDCCH и примерно на 1,1 дБ по сравнению с методом на основе полярного кода. Даже в реальных сценариях, таких как схемы EPA и EVA в LTE-advanced, предлагаемая схема SVC сохраняет свое преимущество в производительности по сравнению с конкурирующими системами:
Трещины в деталях устроены для изменения горизонтального движения на вращательное, как, например, в возвратно-поступательном бензиновом двигателе, или вращательного движения на прямолинейное, как, например, в вращающемся поршневом насосе:
Система 4 с 3 подвижными соединениями и пирамидальной , или скользящее соединение, известно как скользящее соединение. Непрерывное движение ползунков приводится в действие вращением кривошипов, или вращение вращательного движения может быть вызвано сжатием газов против движущегося поршня. Кривошипные ползунки с прямым и смещением — это 2 категории кривошипов ползунков.
Рядный: ползунки на рычажке расположены так, что направление движения подвижного соединения ползунков проходит через базовое соединение кривошипа. При вращении кривошипа создается симметричное движение ползунка вперед и назад.
Движение ползуна несимметрично, если линия движения шарнирного соединения регулятора действительно не проходит через нижнее вращение кривошипов. В одном направлении она идет быстрее, чем в обратном, что называется быстрой техникой:
Прилагаемая диаграмма, на которой движущиеся части слегка окрашены, лучше отображает основную структуру механизма и относительное движение частей. Часть 1, неподвижная рама или блок насоса или двигателя, содержит цилиндр, в котором поршни, часть 4, скользят вперед и назад, как видно в поперечном сечении по боковым стенкам DE и FG. Небольшой кружок в точке A представляет собой главный подшипник гребного винта, который также находится в части 1. Часть 2 кривошипа показана как единый компонент, который соединяет центральный вал в точке A с подшипниками шкива в точке B и, следовательно, с частью 3 ведущей шестерни. вал. Кронштейн показан как линейный элемент, который проходит от подшипника поршневого пальца в точке B к подшипникам поршневого пальца в точке C, соединяя его с двигателем, который изображен в части 4 в виде прямоугольника. Три подшипника в точках A, B и C, показанные кружками, позволяют соединенным частям свободно вращаться относительно друг друга. Когда B находится в точке h , поршень будет в положении H , а когда B находится в точке j , поршень будет в положении J . Торцевая часть канистры (где взрываются газовые смеси) на бензиновом двигателе находится на EG; напряжение, вызванное выбросом, толкнет поршень из положения H в положение J ; а потенциальное движение поршня, соединенного с коленчатым валом и вращающегося вокруг несущего груза, вставленного в несущее колесо А, потребуется для возвратного движения из J до H. Генератор приводил бы в движение вал механического насосного механизма.
При использовании вместе с вращающимся валом он создает прямолинейное возвратно-поступательное движение, аналогичное движению ползунково-кривошипного механизма. Это особенно эффективно, когда требуемый ход возвратно-поступательного движения невелик по сравнению с размерами приводного вала. Эксцентриковый диск 2 имеет эксцентриситет AB и прикреплен к вращающемуся валу не по центру в точке A на иллюстрации. Ремешок и стержень 3 состоят из двух частей, скрепленных между собой и вставленных в канавку по периметру диска. Внутри корпуса 1 шток прикреплен к поршню 4. Эксцентрик скользит внутри ленты при вращении вала, и поршень 4 перемещается по прямой траектории длиной 2АВ. В кривошипно-ползунковой системе AB представляет собой коленчатый вал, а BC представляет собой шатун. Поскольку эксцентрик может быть установлен в любом месте вдоль вала, ни одна часть вала не должна превращаться в кривошип. Эксцентрики широко используются для привода клапанных механизмов двигателей и редко используются для передачи больших усилий из-за чрезмерных потерь на трение, как показано на рисунке 2.9.0003
Поиск алгоритмов, использующих внешние примеры для построения обобщений, является целью теорем машинного обучения с учителем (SML), которые затем используются для прогнозирования будущего. На рис. 3 показан момент нагрузки. Категоризация машинного обучения (ML) под наблюдением Сравнение различных контролируемых методов обучения определяется наиболее эффективным алгоритмом. Сбор данных используется для определения переменных алгоритма категоризации и количества вхождений (признаков). Были использованы семь различных методов машинного обучения: случайный лес (RF), таблицы решений (DT), машина опорных векторов (SVM), наивный байесовский анализ (NB), JRip и решение (j48) и нейронные сети (восприятие NN).
В области машинного обучения (ML) и категоризации шаблонов SVM в последнее время приобрели большое значение. Создание линейной или нелинейной поверхности разделения во входном пространстве является ключевым шагом в процессе классификации. Разделяющая функция в классификации опорных векторов может быть записана как линейная комбинация ядер, связанных с каждым опорным вектором. векторы.
Resulting from the combination of the two formulations,where are the corresponding coefficients, b is the offset, Q ij = y i y J K ( x i , x j ) — симметричная определенная матрица ядра, а C — параметр, используемый для штрафа за точку ошибки в случае разделения. Условия Каруша–Куна–Таккера (ККТ) для дуала можно выразить следующим образом.
Здесь — коэффициенты для каждого соответствующего коэффициента и смещение, b , для каждого из соответствующих коэффициентов. For separable cases, the error points are penalized by Q ij = y i y J K ( x i , x j ) — симметричная матрица с определенным ядром. Можно указать условия ККТ для дуала в терминах ККТ.
Это делит обучающую выборку на три части: S , набор опорных векторов , E , набор ошибок и R , хорошо классифицированный набор .
Например, если ошибочные точки наказываются квадратично с C ′, проблема может быть сведена к отдельному случаю с . Согласно новому дизайну ядра, где = 1, если I = j и = 0 или иначе. В результате такого подхода проблема SVM сводится к линейно разделимому экземпляру.
Подходы с числовой библиотекой используются для решения задачи квадратичной оптимизации во время обучения SVM. Это трудоемкий в вычислительном отношении процесс, который потенциально может привести к нестабильности и трудновыполним. Одним из решений является использование итерационных методов, таких как последовательная минимальная оптимизация (SMO) и алгоритм ближайшей точки (NPA). Здесь представлены дополнительные доказательства.
Этот метод отслеживает список возможных опорных векторов. Старт с парой точек из противоположных классов похож на стратегию DirectSVM. Программа, не колеблясь, добавляет любые обнаруженные нарушения в список возможных кандидатов. Возможно, что другие опорные векторы в наборе могут препятствовать вставке точки нарушения в качестве опорного вектора. Мы удаляем все эти точки из набора кандидатов, удаляя их. Чтобы убедиться, что требования ККТ выполняются, мы снова просматриваем набор данных, пока не будут обнаружены нарушения. Формулировка квадратичного штрафа используется для проверки того, что точки данных в пространстве ядра линейно отделимы, как показано на рисунке 4. 9.0003
4. Результаты и обсуждение
В этих разделах проводится краткое обсуждение обнаружения чудаков на основе беспроводной связи с помощью предложенной модели SVM. Рисунок 5 ясно объясняет систему обнаружения рукояток на основе протокола беспроводной связи. Поверхность отслеживается точкой А, и ближний конец 2–1/4 коленчатого вала регулируется. Отверстия и кривошипные соединения выполнены поворотным ползунком с пуансоном (табл. 1).
Вышеупомянутая теоретическая модель беспроводной связи, основанная на кривошипном анализе, показана на рис. 6.
Контейнеры также можно опорожнять всякий раз, когда глубина или свободное пространство, рассчитанные беспроводным датчиком, превышают пороговый уровень. Интервал времени для опорожнения бункеров установлен на 8 часов, и контейнеры также могут опорожняться всякий раз, когда глубина или свободное пространство, рассчитанное ультразвуковым датчиком, достигает заданного уровня. Для оценки и понимания частоты и интервала, при которых сбор данных оптимален, информация представлена в зависимости от времени и глубины кривошипа, как показано на рисунке 7. 9.0003
Как видно из рисунка 8, глубина кривошипа по умолчанию составляет 35 нм. Всякий раз, когда мусорное ведро опустошается, ультразвуковой датчик считывает значение 35. Каждая полоса на этом графике представляет свободное пространство, доступное в этот час. Всякий раз, когда значение меньше нашего порогового значения 5, пользователь получает предупреждение о необходимости очистки корзины. Таким образом, глубина в следующем часе равна 35.
Ниже приведены входные изображения вместе с их выходными данными. Объект на входном изображении — это ненужный объект, который классифицируется нашей моделью классификации, и результат можно наблюдать в выходном терминале IDE Python. На выходе получается «сухой» или «влажный» в зависимости от классификации входного изображения.
Область кривошипа была в центре внимания этого исследования, а также его реализации на многочисленных аппаратных устройствах. Он также обсудил многочисленные шаги, сделанные в этом секторе, а также его возможное использование. Возможно, в ближайшие несколько лет компания сможет придумать несколько новых концепций защиты изображения, как показано на рис. 9. . Поскольку более старые версии не могли определить точное трение, невозможно было определить правильную функцию кривошипа. Для сложных механических применений необходим динамический кривошипно-шатунный механизм скольжения. Текущие типы не подходят для будущих механических дисплеев. В этом исследовании разработан кривошипный ползун на основе SVM с динамическим трением. Динамическое моделирование и балансировка трения постоянно балансируются с использованием математического подхода SVM. Наконец, числовые результаты подходов «контролер/наблюдатель» успешно представлены. Переменные системы анализируются, отмечая любые ошибки или допущения, которые были сделаны. Производительность оценивается следующим образом: 9Точность 8,45%, чувствительность 97,34%, ползунковый рычажок 96,34% и отзыв 97,34%.
Доступность данных
Данные, подтверждающие результаты этого исследования, можно получить у соответствующего автора по обоснованному запросу.
Конфликт интересов
Автор заявляет об отсутствии потенциальных конфликтов интересов в связи с этим исследованием и публикацией этой статьи.
Благодарности
Эта работа была поддержана Фондом естественных наук Ганьсу (№ 21JR7RM190), Фонд естественных наук Цинъян (№ QY2021A-F008), Инновационный фонд Университета Ганьсу (№ 2021B-277), Фонд докторантуры Университета Лундун (XYBY1906) и Наука и технологии Ганьсу (№ 20JR5RA483) .
Ссылки
Х. Чен, Ю. Лу и Л. Ту, «Выявление неисправностей деградации коробки передач с помощью оптимизированной нейронной сети вейвлета», Удары и вибрация , том. 20, нет. 2013. Т. 2. С. 247–262.
Посмотреть по адресу:
Сайт издателя | Google Scholar
А. Т. Азар, Ф. Э. Серрано, К. Чжу, С. Вайдьянатан и Дж. М. Росселл, «Адаптивная самовозвратная нейронная сеть вейвлетов и контроллер/наблюдатель скользящего режима для кривошипно-шатунного механизма», International Journal of Computer Приложения в технике , вып.
63, нет. 4, стр. 273–285, 2020.Посмотреть по адресу:
Сайт издателя | Google Scholar
С. М. Григореску, А.-М.-Ф. Лупуци, И. Маниу и Э.-К. Ловаш, «Новый плоскопараллельный манипулятор, использующий кривошипно-зубчатую передачу с линейным приводом в качестве соединительной кинематической цепи», в Труды Европейской конференции по науке о механизмах , стр. 496–505, Springer, Чам, Германия, сентябрь 2020 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
А. М. Ф. Лупуци, С. М. Григореску, Э. К. Ловаш, К. Стиклару, И. Кэрэбаш, «Кинематика плоскопараллельного манипулятора с зубчатым кривошипом с линейным приводом в качестве ног 3-R (PRRGR) RR», в Материалы Объединенной международной конференции по механизмам и механическим трансмиссиям и Международной конференции по робототехнике , стр.
249–261, Springer, Cham, Германия, октябрь 2020 г.Посмотреть по адресу:
Google Scholar
З. Хуан, «Конструктивный проект робота для удаления птичьего гнезда на линии электропередачи», в Трудах 3-й Международной конференции по мехатронике и информационным технологиям (ICMEIT) 2019) , стр. 172–176, Atlantis Press, Атлантик, штат Нью-Джерси, США, апрель 2019 г.
Посмотреть по адресу:
Google Scholar
Сингх Р., Сингх Х. и Годиял А. К. Носимая система измерения угла коленного сустава на основе чувствительных к силе резисторов, стр. Материалы конференции IEEE Long Island Systems, Applications and Technology 2018 (LISAT) , стр. 1–3, IEEE, Фармингдейл, штат Нью-Йорк, США, май 2018 г.
Посмотреть по адресу:
Google Scholar
Ю.
Ян, С. Сюй, З. Сяо и С. Тонг, «Конструкция механизма электрического робота распределительной сети для отключения или подключения подводящего провода», Серия конференций IOP: Науки о Земле и окружающей среде , том. 237, нет. 6, ID статьи 062027, 2019.Посмотреть по адресу:
Сайт издателя | Google Scholar
Ю. Ян, Л. Лю, З. Чжоу и Ю. Фань, «Разработка живого рабочего робота для распределительной сети», Серия конференций IOP: Earth and Environmental Science , vol. 237, нет. 6, ID статьи 062026, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
K. Fan, M. Cai, F. Wang et al., «Ротор с подвеской и приводом на струне для эффективного сбора механической энергии сверхнизкой частоты», Преобразование энергии и управление , vol. 198, ID статьи 111820, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С.
Патра, «Проектирование кросс-тренажера с использованием искусственной нейронной сети», Computer Assisted Mechanics and Engineering Sciences , vol. 28, нет. 2021. Т. 2. С. 119–138.Посмотреть по адресу:
Google Scholar
Терницкий С., Рехей И., Кандиак Н., Радиховский И., Млынко О. Экспериментальные исследования резки картона в высекальном прессе с винтово-гайковой передачей механизма привода подвижной прижимной плиты» Acta Mechanica et Automatica , vol. 15, нет. 3, стр. 122–131, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. П. Чен и З. Х. Яо, «Исследование моделирования ползунково-кривошипных механизмов на основе MATLAB», Журнал Аньхойского технического педагогического колледжа , том. 4, 2005.
Посмотреть по адресу:
Google Scholar
Дж.
Ю и К. Вей, «На пути к разработке самоходного робота-дельфина, ориентированного на ползун-кривошип», Усовершенствованная робототехника , том. 27, нет. 12, стр. 971–977, 2013.Посмотреть по адресу:
Сайт издателя | Google Scholar
C. Wei и J. Yu, «Механическая конструкция роботизированного дельфина, ориентированного на ползун-кривошип», в Proceedings of the 10th World Congress on Intelligent Control and Automation , стр. 3741–3746, IEEE, Пекин, Китай, июль 2012 г.
Посмотреть по адресу:
Google Scholar
Д. Чанг, Дж. Ким, Д. Чой, К.-Дж. Чо, Т. Сео и Дж. Ким, «Конструкция ползунково-кривошипного механизма ноги для мобильных прыжковых роботизированных платформ», Журнал механических наук и технологий , том. 27, нет. 1, стр. 207–214, 2013 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
М.
Х. Розен, Г. Ле Пивен, Р. Сахаи, Н. Т. Джафферис и Р. Дж. Вуд, «Разработка отвязной платформы с машущим крылом массой 3,2 г для экспериментов по энергетике полета и управлению», в Proceedings of the 2016 Международная конференция IEEE по робототехнике и автоматизации (ICRA) , стр. 3227–3233, IEEE, Стокгольм, Швеция, май 2016 г.Просмотр по адресу:
Google Scholar
C. Saike and L. Jiangtao, «Оптимальный дизайн кривошипно-ползунковых механизмов на основе моделирования движения», Journal of Mechanical Transmission , vol. 6, 2007.
Посмотреть по адресу:
Google Scholar
Цай Г. К., Чжоу X. М. и Ван З., «Конструкция механической конструкции на основе двухкривошипно-ползункового механизма робота, передвигающегося по кабелю», Journal of Проект машины , вып. 11, 2010.
Посмотреть по адресу:
Google Scholar
Д.
Ван, С. Гао и Ю. Лю, «Роботизированная система реабилитации мышц конечностей при квадриплегии», в Труды Международной конференции IEEE 2011 г. по мехатронике и автоматизации , стр. 1190–1195, IEEE, Пекин, Китай, август 2011 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
В. Де Гроот, Э. Киккен, Э. Хостенс, С. Ван Хекке и Г. Кревекер, «Дополненные нейронными сетями физические модели для систем с частично неизвестной динамикой: приложение к ползунково-кривошипному механизму», 2021 г., https://arxiv.org/abs/1910.12212.
Просмотр по адресу:
Google Scholar
Z. Wan, Y. Dong, Z. Yu, H. Lv и Z. Lv, «Полуконтролируемая машина опорных векторов для слияния изображений мозга на основе цифровых близнецов», Frontiers in Neuroscience , vol. 15, ID статьи 705323, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Т.
