

Содержание
4.Типовые механические характеристики исполнительных устройств.
Механической
характеристикой исполнительного
устройства
— зависимость между приведенными к валу
двигателя скоростью и моментом
сопротивления механизма.
где
момент сопротивления исполнительного
устройства при скорости
;
момент
сопротивления трения в движущихся
частях механизма;
момент
сопротивления при номинальной скорости
;
х
показатель степени, характеризующий
изменение момента сопротивления при
изменении скорости.
Тогда
механические
характеристики исполнительных устройств
можно классифицировать по следующим
категориям:
Рис.
2. Механические характеристики
исполнительных устройств
Не
зависящая от скорости механическая
характеристика (линия 1 на рис. 2). При
этоми
.


подъемные
краны, лебедки, механизмы подач
металлорежущих станков, конвейеры с
постоянной массой перемещаемого
материала и др., а также все механизмы,
у которых основным моментом сопротивления
является момент трения.
Линейно-возрастающая
механическая характеристика (линия 2
на рис. 2).
В
этом случае
и момент сопротивления линейно зависит
от
.
Пример: привод генератора постоянного
тока с независимым возбуждением, если
последний будет работать на постоянный
внешний резистор.
Нелинейно-возрастающая
(параболическая) механическая
характеристика (кривая 3 на рис. 2).
При
этом
и момент сопротивления зависит от
квадрата скорости. Механизмы, обладающие
такой характеристикой, называют
механизмами с вентиляторным моментом,
поскольку у вентиляторов момент
сопротивления зависит от квадрата
скорости. Пример: центробежные насосы,
гребные винты.
Нелинейно-спадающая
механическая характеристика (линия 4
на рис. 2).
При
этом
и момент сопротивления изменяется
обратно пропорционально скорости, а
мощность, потребляемая механизмом,
остается постоянной.
Механической
характеристикой электродвигателя
называется зависимость его угловой
скорости от вращающего момента
.
Почти
все двигатели имеют механическую
характеристику, при которой скорость
является убывающей функцией момента
двигателя. Но степень изменения скорости
с изменением момента характеризуется
жесткостью их механических характеристик.
Жесткость
механической характеристики электропривода
– это отношение разности электромагнитных
моментов, развиваемых электродвигательным
устройством, к соответствующей разности
угловых скоростей электропривода
.
Для
нелинейных характеристик жесткость не
постоянна и определяется в каждой точке
.
Механические
характеристики электродвигателя можно
разделить на 4 основные категории:
Абсолютно
жесткая механическая характеристика
(
,
(скорость)=const
с изменением момента М).
Такой
характеристикой обладают синхронные
двигатели (прямая 1 на рис. 3).
Жесткая
механическая характеристика (скорость
с изменением момента хотя и уменьшается,
но в малой степени).
Пример:
двигатель постоянного тока независимого
возбуждения, асинхронные двигатели в
пределах рабочей части механической
характеристики (кривая 2 на рис. 3).
Мягкая
механическая характеристика (с изменением
момента скорость значительно уменьшается).
Пример:
двигатели постоянного тока последовательного
возбуждения, особенно в зоне малых
моментов (кривая 3 на рис. 3).
Двигатели
постоянного тока смешанного возбуждения
могут быть отнесены ко второй или третьей
группе в зависимости от значения
механической характеристики.
Абсолютно
мягкая механическая характеристика
(
,
момент двигателя с изменением угловой
скорости остается неизменным).
Пример:
двигатели постоянного тока независимого
возбуждения при питании их от источника
тока или при работе в замкнутых системах
электропривода в режиме стабилизации
тока якоря (прямая 4 на рис. 3).
Скоростные и механические характеристики электродвигателей постоянного тока с параллельным возбуждением
Выведенные в предыдущем параграфе уравнения скоростных и механических характеристик справедливы для любого электродвигателя постоянного тока.
Однако это не значит, что для всех электродвигателей характеристики одинаковы. Наоборот, как будет показано, между характеристиками различных электродвигателей постоянного тока имеются существенные различия.
Анализируя любое из полученных в статье особенности электродвигатели постоянного тока уравнений, нетрудно заметить, что все они являются уравнениями прямых линий, если U =соnst и Ф = соnst, т.е. механическая и скоростная характеристики электродвигателя постоянного тока с параллельным возбуждением прямолинейны и :при соответствующем выборе масштабов они могут быть представлены одной прямой (рис. 9).
Действительно, когда электродвигатель работает вхолостую, развиваемый им момент равен нулю, так как нулю равен момент сопротивления на валу двигателя. При этом, согласно выражению (28), нулю должен быть равен и ток в обмотке якоря. Таким образом, из уравнения (25) или (29) может быть получена скорость идеального холостого хода электродвигателя
Нужно иметь в виду, что фактическая скорость холостого хода электродвигателя всегда несколько ниже скорости идеального» холостого хода, так как в действительности момент сопротивления на валу электродвигателя не может быть равен нулю даже при отсутствии нагрузки на электродвигатель, а следовательно, и ток действительного холостого хода электродвигателя нулю не равен.
Если нагрузка на электродвигатель возрастает (т. е. возрастает момент сопротивления на его валу), то возрастает развиваемый электродвигателем вращающий момент и растет ток в его якорной обмотке. Это должно вызывать, согласно уравнениям (25) и (29), снижение скорости вращения электродвигателя. В режиме короткого замыкания электродвигателя (режим стоянки под током) n = 0, а ток короткого замыкания Аналогично, момент короткого замыкания Мк = кФІя.к. Таким образом, скоростная характеристика электродвигателя постоянного тока с параллельным возбуждением п = f(Ія) и механическая характеристика п = f(М) пересекают оси координат в совершенно определенных точках, соединив которые, можно получить указанные характеристики, представленные одной прямой (см. рис. 9). На рис. 9, помимо естественной характеристики, показан ряд искусственных характеристик двигателя при различных дополнительных сопротивлениях R в якорной цепи. Из уравнений (27) и (30) вытекает, что искусственные характеристики тоже прямолинейны, исходят из общей точки холостого хода и лежат ниже естественной характеристики, т. е. чем выше дополнительное сопротивление R в якорной цепи, тем круче (или мягче) характеристика электродвигателя. На рисунке обозначены: Мн (Iя.н) — номинальный момент и ток якоря; Мк (Iя.к) — момент и ток якоря при заторможенном якоре.
Из уравнений (27) и (30) вытекает, что искусственные характеристики тоже прямолинейны, исходят из общей точки холостого хода и лежат ниже естественной характеристики, т. е. чем выше дополнительное сопротивление R в якорной цепи, тем круче (или мягче) характеристика электродвигателя. На рисунке обозначены: Мн (Iя.н) — номинальный момент и ток якоря; Мк (Iя.к) — момент и ток якоря при заторможенном якоре.
Как видно из уравнений, скорость электродвигателя параллельного возбуждения меняется при различных нагрузках за счет изменения падения напряжения в сопротивлении якоря. Поскольку сопротивления якорей машин постоянного тока невелики, скорость электродвигателей параллельного возбуждения меняется незначительно, особенно при работе на естественной характеристике. Так, для электродвигателей мощностью от 5 до 100 квт перепад скорости пои номинальной нагрузке
где большие значения соответствуют электродвигателям меньшей мощности.
Ввиду прямолинейности, практическое построение характеристик электродвигателя с параллельным возбуждением выполнить нетрудно. Для этого достаточно иметь координаты двух точек. Обычно естественную характеристику электродвигателя строят по скорости идеального холостого хода, номинальной скорости вращения и номинальному моменту (или току). Скорость идеального холостого хода электродвигателя может быть вычислена следующим образом.
Против э. д. с. при работе электродвигателя в номинальном режиме на естественной характеристике
а на холостом ходу
Разделив второе выражение на первое, получим
В выражении (34) все величины, кроме Rя могут быть взяты из паспорта электродвигателя. Величина Rя может быть взята из формуляра на электродвигатель, определена измерением или приближенно из следующего выражения:
где Рн — номинальная мощность электродвигателя, квт;
?н — к. п.д. электродвигателя при номинальной нагрузке.
п.д. электродвигателя при номинальной нагрузке.
Выражение (35) составлено исходя из предположения, что при номинальной нагрузке электродвигателя потери мощности в сопротивлении якоря равны примерно половине общих потерь в электродвигателе. Если величина R определяется измерением, то нужно иметь в виду, что сопротивление якоря включает в себя сопротивления обмотки якоря, обмотки дополнительных полюсов, щеток и сопротивления компенсационной обмотки (если она имеется), соединенных последовательно.
Выше указывалось, что вращающий момент электродвигателя автоматически следует за моментом сопротивления механизма. Физическая сущность этого процесса состоит в следующем. Если электродвигатель работает с установившейся скоростью, то развиваемый им вращающий момент М1 равен моменту сопротивления на его валу Мс. Если же момент сопротивления возрастет до Mс2> M1, то скорость электродвигателя начнет уменьшаться.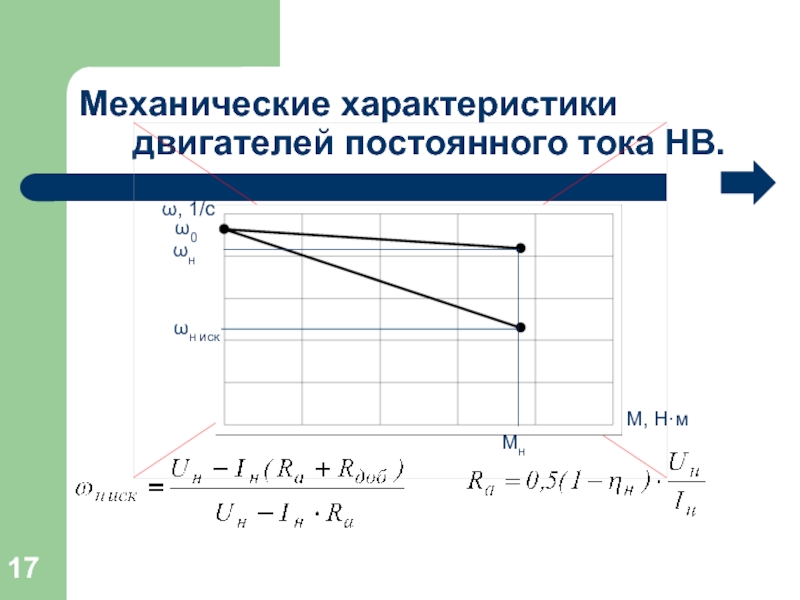 При этом уменьшается и против э. д. с., а ток в обмотке якоря, согласно выражению (22), будет возрастать, что вызовет возрастание вращающего момента. Уменьшение числа оборотов будет происходить до тех пор, пока вращающий момент не станет равным моменту сопротивления Мс2.
При этом уменьшается и против э. д. с., а ток в обмотке якоря, согласно выражению (22), будет возрастать, что вызовет возрастание вращающего момента. Уменьшение числа оборотов будет происходить до тех пор, пока вращающий момент не станет равным моменту сопротивления Мс2.
При уменьшении момента сопротивления происходит обратный процесс. Если момент сопротивления станет меньше вращающего момента, развиваемого электродвигателем, то скорость вращения последнего начнет возрастать. Это вызовет возрастание противо э. д. с., а значит, уменьшение тока и вращающего момента. Процесс прекратится, когда вращающий момент станет равным моменту сопротивления на валу электродвигателя.
ОБЩИЕ СВОЙСТВА ЭЛЕКТРОДВИГАТЕЛЕЙ (двигателей и приводов)
Все электродвигатели подчиняются законам электромагнетизма и подчиняются по существу тем же ограничениям, налагаемым материалами (медью и железом), из которых они сделаны. Поэтому нас не должно удивлять, что на фундаментальном уровне все двигатели, независимо от их типа, имеют много общего.
Этим общим свойствам, большинство из которых было затронуто в этой теме, обычно не уделяется внимания. темы, как правило, концентрируются на различиях между типами двигателей, и производители обычно заинтересованы в продвижении достоинств своего конкретного двигателя за счет конкуренции. Этот разделяющий акцент приводит к тому, что лежащее в основе единство затемняется, оставляя пользователям мало возможностей для усвоения того рода знаний, которые помогут им выносить обоснованные суждения.
Наиболее полезные идеи, о которых стоит помнить, приведены ниже с краткими примечаниями к каждой. Опыт показывает, что пользователи, твердо держащие в уме эти основные идеи, смогут понять, почему один двигатель кажется лучше другого, и будут чувствовать себя намного увереннее, когда столкнутся с трудной задачей взвешивания плюсов и минусов конкурирующих типов.
Рабочая температура и охлаждение
Система охлаждения является самым важным фактором, определяющим выходную мощность любого двигателя.
Табличка 1.2 Асинхронный двигатель со стальным каркасом, 150 кВт (201 л.с.), 1485 об/мин. Активные части полностью закрыты, а охлаждение обеспечивается с помощью внутреннего вентилятора, который циркулирует охлаждающим воздухом внутри двигателя через полые ребра, и внешнего вентилятора, который обдувает корпус. (Фотография предоставлена Бруком Кромптоном.)
Любой двигатель будет выдавать больше мощности, если его электрическая цепь работает с большей нагрузкой (т. е. если допустимо увеличение тока). Ограничивающим фактором обычно является допустимое превышение температуры обмоток, которое зависит от класса изоляции.
Для изоляции класса F (наиболее широко используемой) допустимое превышение температуры составляет 100 К, тогда как для класса Н — 125 К. Таким образом, если охлаждение остается прежним, можно получить большую мощность, просто используя более качественную изоляцию. В качестве альтернативы, при заданной изоляции мощность можно увеличить, если улучшить систему охлаждения. Например, двигатель со сквозной вентиляцией может давать вдвое большую выходную мощность, чем в остальном идентичная, но полностью закрытая машина.
Например, двигатель со сквозной вентиляцией может давать вдвое большую выходную мощность, чем в остальном идентичная, но полностью закрытая машина.
Крутящий момент на единицу объема
Для двигателей с аналогичными системами охлаждения номинальный крутящий момент примерно пропорционален объему ротора, который, в свою очередь, примерно пропорционален общему объему двигателя.
Это связано с тем, что при данной схеме охлаждения удельные и магнитные нагрузки машин разных типов будут более
и менее одинаковыми. Таким образом, крутящий момент на единицу длины зависит в первую очередь от квадрата диаметра, поэтому можно ожидать, что двигатели примерно одинакового диаметра и длины будут создавать примерно одинаковый крутящий момент.
Мощность на единицу объема – важность скорости
Выходная мощность на единицу объема прямо пропорциональна скорости.
Низкоскоростные двигатели непривлекательны, потому что они большие и, следовательно, дорогие. Обычно гораздо лучше использовать высокоскоростной двигатель с механическим редуктором. Например, двигатель с прямым приводом для портативной электрической отвертки был бы абсурдным предложением.
Обычно гораздо лучше использовать высокоскоростной двигатель с механическим редуктором. Например, двигатель с прямым приводом для портативной электрической отвертки был бы абсурдным предложением.
Влияние размера – удельный крутящий момент и КПД
Большие двигатели имеют более высокий удельный крутящий момент (на единицу объема крутящего момента) и более эффективны, чем маленькие.
У больших двигателей удельная электрическая нагрузка обычно значительно выше, чем у малых, а удельная магнитная нагрузка несколько выше. Сочетание этих двух факторов обеспечивает более высокий удельный крутящий момент.
Очень маленькие двигатели по своей природе очень неэффективны (например, 1% в наручных часах), тогда как двигатели мощностью более 100 кВт имеют КПД выше 95%. Причины этого масштабного эффекта сложны, но связаны с тем фактом, что в больших электромагнитных устройствах отношение сопротивления к падению напряжения можно сделать относительно небольшим, тогда как в малых устройствах сопротивление становится доминирующим.
Эффективность и скорость
Эффективность двигателя увеличивается с увеличением скорости.
При заданном крутящем моменте выходная мощность возрастает прямо пропорционально скорости, а электрические потери, вообще говоря, постоянны. В этих условиях эффективность растет со скоростью.
Номинальное напряжение
Двигатель может быть рассчитан на любое напряжение.
В определенных пределах всегда можно перемотать двигатель на другое напряжение, не влияя на его характеристики. Двигатель на 200 В, 10 А можно было бы перемотать на 100 В, 20 А, просто используя вдвое меньше витков на катушку провода с удвоенной площадью поперечного сечения. Общее количество активного материала и, следовательно, производительность будут одинаковыми.
Кратковременная перегрузка
Большинство двигателей можно кратковременно перегружать без повреждений.
Непрерывная электрическая нагрузка (то есть ток) не может быть превышена без повреждения изоляции, но если двигатель некоторое время работал с пониженным током, допустимо, чтобы ток (и, следовательно, крутящий момент) был намного больше нормального на короткий период времени. Основными факторами, влияющими на величину и продолжительность допустимой перегрузки, являются тепловая постоянная времени (от которой зависит скорость повышения температуры) и предыдущая схема работы. Тепловые постоянные времени варьируются от нескольких секунд для небольших двигателей до многих минут или даже часов для больших. Рабочие режимы, очевидно, очень изменчивы, поэтому вместо того, чтобы полагаться на следование определенному шаблону, обычно двигатели оснащаются устройствами защиты от перегрева (например, термисторами), которые вызывают аварийный сигнал и/или отключают подачу при достижении безопасной температуры. превышен.
Основными факторами, влияющими на величину и продолжительность допустимой перегрузки, являются тепловая постоянная времени (от которой зависит скорость повышения температуры) и предыдущая схема работы. Тепловые постоянные времени варьируются от нескольких секунд для небольших двигателей до многих минут или даже часов для больших. Рабочие режимы, очевидно, очень изменчивы, поэтому вместо того, чтобы полагаться на следование определенному шаблону, обычно двигатели оснащаются устройствами защиты от перегрева (например, термисторами), которые вызывают аварийный сигнал и/или отключают подачу при достижении безопасной температуры. превышен.
[Решено] Характеристики двигателя постоянного тока, также известные как механические характеристики. 0071 крутящий момент -токовая характеристика якоря
Вариант 2: характеристика скорость-момент
Бесплатно
Рассуждение Бесплатный пробный тест
47,8 тыс. пользователей
пользователей
10 вопросов
10 баллов
8 минут
Характеристики скорости и момента также известны как механические характеристики двигателей постоянного тока.
Характеристики крутящего момента и тока якоря также известны как электрические характеристики двигателя.
Характеристики серийных двигателей:
На рис. показаны соединения серийного двигателя.
В этом двигателе ток, проходящий через обмотку возбуждения, такой же, как и в якоре.
Если механическая нагрузка на двигатель увеличивается, ток якоря также увеличивается. Следовательно, поток в последовательном двигателе увеличивается с увеличением тока якоря и наоборот.
(i) Скорость (N) в зависимости от тока (Ia) Характеристика:
Скорость последовательного двигателя определяется выражением,
\(N\propto \frac{E_b}{\phi}\)
Где Eb – обратная ЭДС и определяется как
Eb = V — Ia(Ra + Rse)
При увеличении тока якоря противо-ЭДС уменьшается из-за падения Ia(Ra + Rse) при увеличении потока.
