

Содержание
«Ручной» манипулятор / Хабр
Как-то раз, во время обучения на втором курсе университета, передо мной была поставлена задача: стряпать что-нибудь «этакое», дабы подтвердить высокое звание «будущего инженера-робототехника». На этой пафосной ноте я отправился в глубины сознания для поиска идей. После непродолжительного путешествия появилась мысль об устройстве, теорией создания которого хочу поделиться с общественностью.
Суть разработки такая. Рассмотрим обычный, скажем, 5-ти осевой манипулятор (кинематическая структурная схема изображена на рисунке ниже). Его возможности при перемещении в пространстве широки: он способен совершать движения в 5-ти координатах, причём одновременно, т.е. 3 координаты по трём осям XYZ и вращение вокруг двух из них. В таком случае рабочий элемент манипулятора способен занять любое положение в рабочем пространстве и вместе с этим сохранить требуемую ориентацию рабочего органа (не считая поворот рабочего элемента вокруг собственной оси).
Данная конструкция относится к манипуляторам антропоморфного типа и поэтому способна, приближённо конечно, воспроизводить движение человеческой руки. Рассуждая над этим тезисом как раз пришла мысль, что интересно бы сделать так, чтобы манипулятор дистанционно мог копировать движения моей руки в реальном времени. Чтобы я просто одевал на руку сенсор, считывающий перемещения руки (как линейные, так и угловые), и эта механическая штука будет повторять их вслед за мной. Как манипулятор может выполнять функции перемещения и ориентирования рабочего органа, так и с помощью руки человек может перемещать и ориентировать свою ладонь, следовательно эти два процесса схожи и их можно представить как один общий процесс — захват движения руки манипулятором в реальном времени.
Раскатал губу
Забегая вперед, скажу, что удалось только реализовать захват ориентирующего движения ладони, т.е. я мог управлять ориентации рабочего органа, но не его линейным перемещением в пространстве.
На этом формулировка задачи завершена. Теперь проведём анализ задания (не поворачивается язык назвать это «техническим заданием»). Необходимо разработать два, конструктивно независимых устройства: непосредственно сам манипулятор и устройство отслеживания движения, которое крепиться на руку. Затем последует трудоёмкий процесс создания математических описаний, составления алгоритма и написания программного обеспечения. Делим проект на три части:
1. Разработка манипулятора
2. Разработка устройства для отслеживания перемещения руки
3. Всё остальное
Вкратце о каждом из этапов:
- Здесь всё тривиально… В САПР проектируем конструкцию, выполняем чертежи деталей и изготавливаем, после собираем. Затем рассчитываем кинематику и пишем собственное программное обеспечение, которое скроет низкоуровневые обращения к приводам.
- На этом этапе определяемся с типом сенсоров, проектируем принципиальную схему, изготавливаем печатную плату, разрабатываем алгоритм определения положения в пространстве, пишем ПО.

- Собственно, ради чего были предыдущие этапы – заставить манипулятор слушаться хозяина. Здесь разрабатываю алгоритм конвертации координат в рабочее поле манипулятора.
1. Разработка манипулятора
В этом проекте, как было сказано выше, используем манипулятор с 5-ю степенями свободы. Такое количество степеней свободы достаточно, т.к. в их число входит три линейных перемещения и два вращательных. Последние два необходимы для ориентации рабочего органа, поскольку направление РО в пространстве можно задавать в виде вектора, а вектор определённо можно восстановить из двух углов поворота (не учитывая длины). В таком случае нам необходимо пять обобщённых координат, равное числу осей.
Звенья манипулятора связаны вращательными кинематическими парами пятого класса. Конструкция манипулятора стандартная для своего типа (кинематическая схема представлена в начале статьи). Имеет в составе неподвижную станину, с которой связана базовая система координат, поворотную стойку, к которой крепятся остальные подвижные звенья, соединённый в цепь. К конечному звену (фланцу) крепиться рабочий орган, в данном случае его имитация в виде стрелообразного указателя (см. изображение ниже).
К конечному звену (фланцу) крепиться рабочий орган, в данном случае его имитация в виде стрелообразного указателя (см. изображение ниже).
Фотоотчёт сборки
ЗD–модель построена в САПР «Компас 3D». Материал деталей – фанера 4 мм и PLA для пластиковых деталей. Детали из фанеры вырезались на лазерном станке, детали из пластика печатались на 3d-принтере. В качестве приводов осей используются цифровые сервоприводы Dynamixel AX-12. Внешний вид манипулятора напоминает одного гнусного насекомого, от которого он получил прозвище «Комар».
Математическое описание кинематики
На этом этапе необходимо рассчитать прямую и обратную кинематику манипулятора. Прямая задача состоит в том, чтобы по известным значениям обобщённых координат (в данном случае углы поворота звеньев) определить положения звеньев относительно некоторой базовой системы координат. Обратная ей задача называется обратной или инверсной кинематикой, заключается в определении параметров обобщённых координат для достижения желаемой позиции и ориентации рабочего органа манипулятора.
Начнём с расчёта обратной кинематики. Изобразим геометрическую схему манипулятора, из которой будут ясны интересующие нас геометрические соотношения.
Требуемую позицию изображаем радиус-вектором . Здесь стоит пояснить, почему вектор проведён до фланцевой точки, а не до конечной точки РО. Поскольку ориентация рабочего органа нам известна заранее (я её сам определяю согласно некоторым требованиям), то необходимо, чтобы фланцевая точка оказалась в нужном месте, указанное как вектор . Этот вектор получается вычитанием из радиус-вектора , проведённого к конечное точки РО, вектора его ориентации , относительно БСК, т.е:
Рассмотрим переход фланцевой точки в нужное положение. Оно осуществляется поворотам звеньев a и b (их я изобразил в виде векторов) в шарнирах A, B и C. Начало базовой системы координат (БСК) поместим в точку шарнира B. Ось вращения шарнира A направлена вдоль оси Z, оси B и C направлены перпендикулярно Z.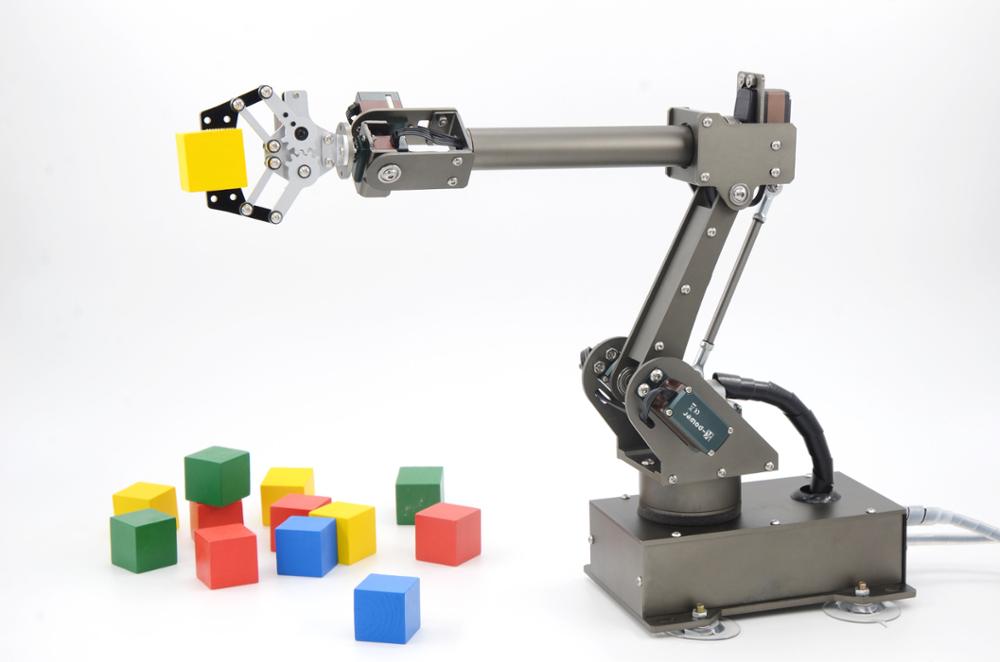
Когда всё формальности соблюдены, перейдём к сути. Для решения обратной задачи кинематики я использовал геометрический подход в силу простоты конструкции манипулятора. Из геометрии видно, что вектор равен сумме векторов звеньев и . Углы , , — углы поворота звеньев А, В и С соответственно.
Рассмотрим треугольник, ограниченный векторами , и . Из этого треугольника по теореме косинусов найдём углы и . Пусть длины векторов будут равны:
Запишем теорему косинусов относительно искомых углов:
Выразим углы и :
Из геометрической схемы видно, что:
Тогда:
Окончательно, переход от линейной координаты к углам поворота звеньев осуществляется формулами:
Теперь, когда переместили фланцевую точку в требуемое положение надо правильно сориентировать рабочий орган. Чтобы это сделать, необходимо знать координаты вектора относительно фланцевой точки, т.е. координаты в базисе локальной системы координат (ЛСК) – , начало которой расположено в фланцевой точке манипулятора.
Чтобы это сделать, необходимо знать координаты вектора относительно фланцевой точки, т.е. координаты в базисе локальной системы координат (ЛСК) – , начало которой расположено в фланцевой точке манипулятора.
Вектор направлен по звену b, вектор – вдоль оси шарнирного соединения f1.
Для нахождения базиса определим матрицу перехода от БСК (с базисом ) и ЛСК. Эта матрица получается путём комбинации поворотов в шарнирах A, B и C:
где
Т.к. матрица является единичной, тогда:
Знающему читателю
Знающий читатель может здесь найти схожесть с представлением Денавита – Хартенберга для решения прямой задачи кинематики. Да, это оно, упрощённое до нельзя и с моими небольшими изменениями. Здесь я не использую однородные преобразования, не учитываю конструктивные особенности, как угловое и линейное смещение осей и т. д. Просто я так спроектировал конструкцию, чтобы там отсутствовали вышеперечисленные лишние параметры, оставив только являющиеся обобщенными координатами.
д. Просто я так спроектировал конструкцию, чтобы там отсутствовали вышеперечисленные лишние параметры, оставив только являющиеся обобщенными координатами.
Матрица вычисляется путём перемножения матриц поворота вокруг оси на угол.
Зададим функцию, которая вычисляет эту матрицу:
Ось берётся в виде вектора как столбец матрицы, полученной предыдущими поворотам, а углы уже рассчитаны выше.
В итоге получаем:
Пусть вектор рабочего органа в БСК . Тогда справедливо равенство:
Отсюда выразим – вектор рабочего органа в базисе , т.е. относительно фланцевой точки:
Теперь, зная вектор РО, можно рассчитать углы поворота ориентирующих осей f1 и f2
Чтобы переместить РО в заданную позицию, требуется совершить поворот на углы и . Из рисунка видно, что
Из рисунка видно, что
где — длина рабочего органа,
— координаты вектора .
Программное обеспечение манипулятора разделено на два уровня, верхний и нижний. Верхний уровень написан в Matlab в виде библиотеки и различными командами-методами, нижний – на микроконтроллере Atmega328. Задача верхнего уровня состоит в том, чтобы сформулировать команды, отсылаемые на микроконтроллер. Его задача получить команду и в соответствии с ней установить приводы в нужное положение. В таком виде система управления оказалась надёжной (пока что…) и удобной в использовании.
Почему Matlab?
Изюминка, как по мне, языка Matlab в том, что операции с матрицами там происходят как обычные алгебраические соотношения, и не надо городить вложенных циклов как это делается, например, в языке C. Плюс в Matlab доступна практически любая «возжеланная» математическая операция, что доставляет огромное счастье.
Формулировка команды и отправка со стороны верхнего уровня происходит следующим образом: пользователь в командном окне Matlab вызывает функцию из библиотеки (например, функцию простого перемещения в точку), указывает необходимые аргументы (обычно это координаты и ориентация РО). После по изложенным выше математическим соображения, записанных в библиотеку, вычисляются углы поворота осей и при необходимости скорости вращения. После по простенькому протоколу собираем команду и шлём её на микроконтроллер нижнего уровня по последовательному COM – порту.
После по изложенным выше математическим соображения, записанных в библиотеку, вычисляются углы поворота осей и при необходимости скорости вращения. После по простенькому протоколу собираем команду и шлём её на микроконтроллер нижнего уровня по последовательному COM – порту.
Пару слов о написанной библиотеке. В её распоряжении есть следующие функции:
- функции создания соединения по последовательному интерфейсу
- функции перемещения
- в точку, с постоянной скоростью всех приводов
- в точку, с конечным остановом всех приводов (скорость привода подбирается в пропорции от собственного и самого большого угла поворота. Таким образом в конце подхода к точке заканчивают движение все приводы)
- в точку, с плавным перемещение каждого привода (в этом случае график скорости выглядит как трапеция с участками разгона, постоянной скорости и торможения)
График
- в точку, по вручную заданным углам поворота осей и скорости вращения
Список функций можно конечно расширить, но достаточно было и этого функционала для решения непосредственно той задачи, для которой манипулятор и проектировался.
На видео продемонстрирована работа манипулятора.
2. Разработка устройства для отслеживания перемещения руки
Переходим к следующему этапу. Здесь потребуется спроектировать специальное устройство, которое может отслеживать в реальном времени положение в пространстве ладони. Также этот процесс носит название «захват движения». Для осуществления задуманного я решил использовать бесплатформенную инерциальную навигационную систему (БИНС) на основе трёх датчиков: гироскопа, акселлерометра и магнитометра. Связка этих датчиков называется IMU – сенсор (в переводе и есть то самое БИНС).
Сперва я спроектировал печатную плату с необходимым мне функционалом, на которой я разместил эти три датчика. В качестве обрабатывающего контроллера я выбрал (точнее взял что было) микроконтроллер Atmega2560. Сенсоры использовал распространённые и дешёвые на китайском рынке. Это спаренные датчики трёхосные гироскоп и акселерометр MPU6050 и магнитометр HMC5883l.
Фото готовой платы
Алгоритм расчёта положения в пространстве достаточно прост: вначале определяем ориентацию в виде базиса локальной системы координат (ЛСК), которая связана с датчиками, а в конечном итоге с ладонью руки.
Ориентацию определяем относительно начальной системы координат (НСК), что по сути является начальным положением устройства в момент включения питания. Базисы НСК и ЛСК состоят вектор-столбцов её орт:
Они связаны соотношением:
Где – матрица перехода, она же матрица вращения в пространстве. Базис НСК будем считать единичной матрицей. Следовательно
.
После, вектор ускорения , который известен относительно ЛСК, необходимо определить в НСК. Это делается путём умножения вектора-столбца ускорения на базис ЛСК:
Затем полученный вектор ускорения два раза интегрируем по времени и получаем расстояние, т. е. координаты:
е. координаты:
Первые попытки реализации этого алгоритма были весьма наивны… Наивность была в том, что я посчитал возможным только по данным гироскопа, используя дискретное интегрирование, получить матрицу поворота вокруг оси. Осью в данном случае можно рассматривать как псевдовектор угловой скорости, компоненты которого (проекции на оси) и есть выходные данные с датчика гироскопа. А угол в свою очередь получается интегрированием модуля вектора. Первоначальный задор и энтузиазм пропал, когда я увидел чудовищный по величине, так называемый «дрейф нуля», вызванный накапливающейся ошибкой из-за погрешности дискретного интегрирования и собственного шума датчика. Ещё тогда у меня появились мысли, что по данным акселерометра, который в состоянии покоя показывает вектор, обратный вектору ускорения свободного падения (далее в тексте вектор гравитации), можно делать корректировку матрицы, но и здесь появляется неопределённость, связанная с тем, что корректировка возможно только с точностью до поворота угла вокруг оси Z. Корректировка будет полноценна в том случае, если будет возможным восстановить матрицу поворота альтернативным способом, т.е. без применения данных гироскопа.
Корректировка будет полноценна в том случае, если будет возможным восстановить матрицу поворота альтернативным способом, т.е. без применения данных гироскопа.
Особо интересующимся
Особо интересующимся поясню. Почему нельзя по акселерометру восстановить матрицу поворота? Точнее недостаточно данных. Как нам известно, вектор гравитации направлен всегда к центру планеты, а, следовательно, перпендикулярен поверхности Земли. Поскольку мы связываем начальную систему координат, например, со столом, так что плоскость XY параллельная поверхности стола, который в свою очередь параллелен (с некоторой условностью) полу, а пол в свою очередь параллелен плоскости основания здания, которая обычно является касательной плоскостью к поверхности Земли. Отсюда делаем вывод, что показания акселерометра в состоянии покоя (или при равномерном движении) говорят нам о положении оси ЛСК, относительно НСК. На этом полезность этих данных исчерпывается, т. к. вращение вокруг оси не изменят саму ось , но изменяет две остальные оси и . Следовательно показания акселерометра не изменятся и тогда положение будет не определено.
к. вращение вокруг оси не изменят саму ось , но изменяет две остальные оси и . Следовательно показания акселерометра не изменятся и тогда положение будет не определено.
Тогда необходимо использовать ещё один фактор, по которому возможно будет сделать полноценную корректировку положения. Этим фактором является магнитное поле Земли, которое наряду с гравитацией в отдельной взятой точке планеты не меняются со временем (в краткосрочной перспективе конечно). Его измеряем при помощи вышеупомянутого датчика HMC5883l. В таком случае мы имеем два вектора, которых достаточно, чтобы относительно них определить положение в пространстве.
Теперь возникает закономерный вопрос – «как это сделать?». После неудачных попыток ответить на это вопрошание самостоятельно я полез в интернет, где нашёл нужную мне информацию. Задача определения ориентации в пространстве по данным трёх измерений (угловая скорость, вектор гравитации и вектор магнитного поля) встаёт также при проектировании любительских летательных аппаратов (например коптеры), поэтому эта задача не раз решалась различными методами. Один из популярных методов – это так называемый фильтр Маджвика (Sebastian O.H. Madgwick). Прочитав оригинальную статью и не поняв англицкого, я обратился к замечательному переводу (спасибо автору за проделанный труд). Пока углублялся в изучении статьи у меня всё чаще и чаще возникала мысль о том, чтобы всё-таки попробовать написать свой алгоритм фильтра определения положения, учитывая, что к этому моменту мой уровень познаний в этой области заметно повысился. Хотя бы ради интереса «изобрести велосипед»! И я его «изобрёл». Ниже привожу свои рассуждения.
Один из популярных методов – это так называемый фильтр Маджвика (Sebastian O.H. Madgwick). Прочитав оригинальную статью и не поняв англицкого, я обратился к замечательному переводу (спасибо автору за проделанный труд). Пока углублялся в изучении статьи у меня всё чаще и чаще возникала мысль о том, чтобы всё-таки попробовать написать свой алгоритм фильтра определения положения, учитывая, что к этому моменту мой уровень познаний в этой области заметно повысился. Хотя бы ради интереса «изобрести велосипед»! И я его «изобрёл». Ниже привожу свои рассуждения.
В алгоритме используются показания все трёх датчиков. Напомню, задача алгоритма – вычисление ориентации объекта и компенсация дрейфа нуля гироскопа, учитывая данный пары акселерометра и магнитометра. В качестве математического инструмента, описывающего положение, используется кватернион, т.к. он удобен в плане построения и оптимизация алгоритма и требует меньше математических операций для его расчёта в отличие от матриц. Кватернион вращения в пространстве выглядит следующим образом:
Зная ось вращения, описанное нормированным вектором , и угол (откуда они берутся сказано выше) можно рассчитать кватернион:
Тогда, используя только показания гироскопа, на каждой итерации цикла будем рассчитывать текущее значение кватерниона по выражению:
Здесь – кватернион в данный момент времени. Индекс G сверху говорит о том, что это значение относится к измеренному относительно показаний гироскопа, т.е. угловой скорости; – значение кватерниона в предыдущий момент времени; –изменение положение за один шаг измерений, можно сказать дискретное изменение положения на угол за – период дискретизации, выраженное кватернионом вращения (*).
Индекс G сверху говорит о том, что это значение относится к измеренному относительно показаний гироскопа, т.е. угловой скорости; – значение кватерниона в предыдущий момент времени; –изменение положение за один шаг измерений, можно сказать дискретное изменение положения на угол за – период дискретизации, выраженное кватернионом вращения (*).
Следующий этап вычислений – нахождение матрицы поворота исходя из данных пары датчиков акселерометра и магнитометра. Конкретно, рассматриваем вектор гравитации и вектор индукции магнитного поля Земли, которые, как это было сказано выше, статичны относительно Земли и связанной с ней НСК. Здесь тезис такой: зная значения гравитации и индукции в базисе ЛСК и НСК можно рассчитать матрицу перехода (поворота) от НСК к ЛСК и кватернион вращения в пространстве.
Обозначим через нормированный начальный вектор гравитации. Его можно принять таким:
Через обозначаем нормированный начальный вектор магнитной индукции:
Также требуется третий вектор , который связан с этими двумя. Он получается векторным умножением на :
Он получается векторным умножением на :
Теперь формируется матрица , которая характеризует начальной положение, т.е. НСК, поскольку в начальный момент времени ЛСК совпадает с НСК. Матрица получается из компонентов векторов , и :
Аналогично, но уже на каждой итерации цикла, создаётся подобная матрица , где – текущий нормированный вектор магнитной индукции, – текущий нормированный вектор гравитации, . Эта матрица характеризует положение ЛСК, т.к. эти вектора известны в системе координат датчиков, которая совпадает с ЛСК. Тогда, зная обе матрицы, можно записать такое уравнение:
Оно связывает две матрицы, найденные при разных обстоятельствах. Учитывая выражение и то, что базис – единичная матрица, получим:
Отсюда выразим матрицу перехода :
Первый множитель, как можно понять, рассчитывается только один раз в самом начале алгоритма, и не требует пересчёта в процессе работы.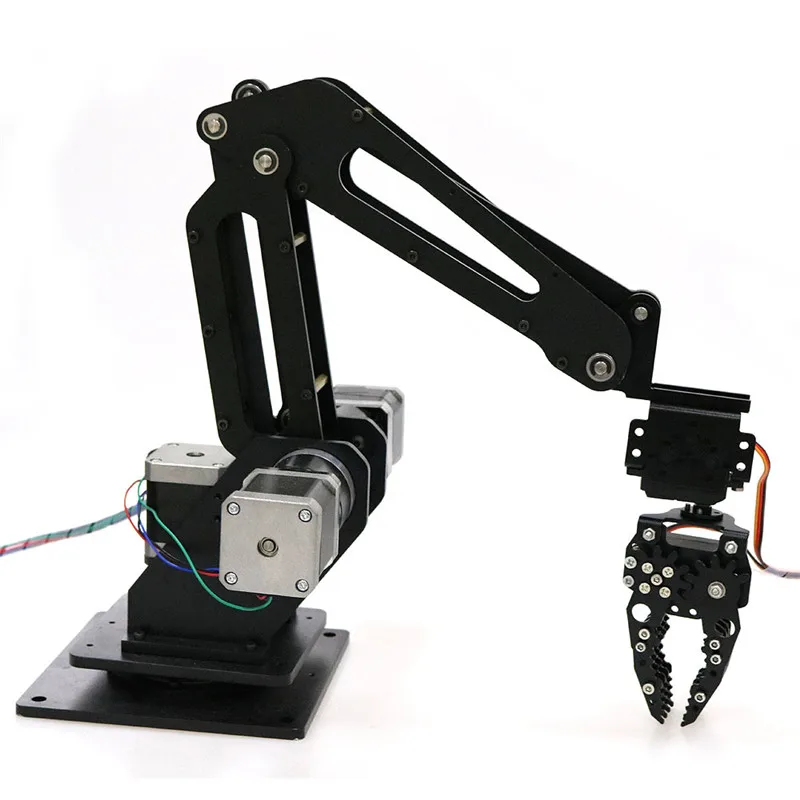 Второй множитель формируется довольно таки легко и не принуждённо на каждой итерации цикла.
Второй множитель формируется довольно таки легко и не принуждённо на каждой итерации цикла.
После, когда найдена матрица перехода, преобразуем её в кватернион (алгоритм конвертации из матрицы в кватернион вещь публичная и приводить здесь его не буду).
В итоге нам известны два кватерниона, найденные независимо друг от друга. И для совмещения результатов я применил простенький комплементарный фильтр с коэффициентом , который берётся из диапазона от 0 до 1:
В результате получаем кватернион, в котором находится актуальная информация о положении в пространстве устройства с модулем БИНС.
«Велосипед» поехал… Алгоритм работал, но в некоторых положениях вёл себя несколько не адекватно, что в принципе не мешало, но и не давало повода думать о нём положительно. Свой спортивный интерес я удовлетворил, и теперь можно обратиться к готовым решениям, более качественным. Тогда я вновь вернулся к статье Себастьяна Маджвика и решил использовать его алгоритм, благо, что этот замечательный человек опубликовал все исходники на сайте проекта.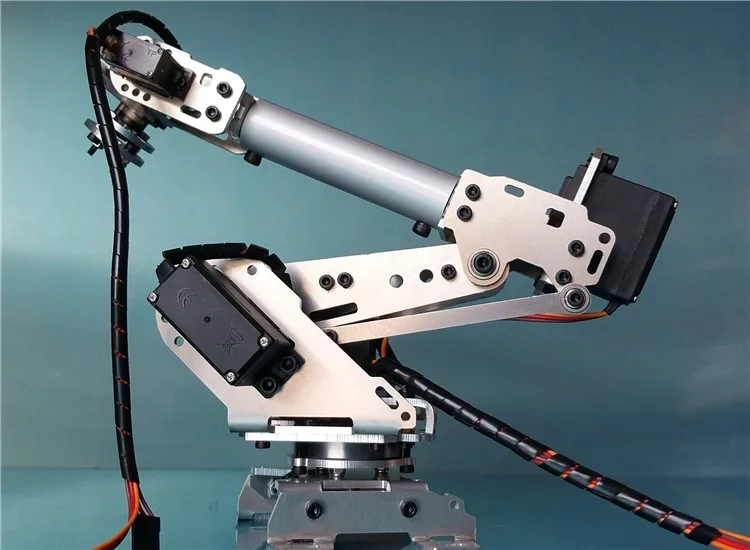 В архиве были исходный коды на разных языках, в том числе и на языке Matlab. Этот факт повлиял на моё решение отказать от идеи делать все вычисления на микроконтроллере (тем паче что он 8-ми битный) и писать программу уже на компьютере в среде Matlab. Микроконтроллер используется только для опрашивания датчиков и отсылку данных на ПК (похожая ситуация и с манипулятором). В таком случае основной программный код, который подвергается изменениям и отладке, базируется в среде Matlab, что весьма удобно в процессе работы.
В архиве были исходный коды на разных языках, в том числе и на языке Matlab. Этот факт повлиял на моё решение отказать от идеи делать все вычисления на микроконтроллере (тем паче что он 8-ми битный) и писать программу уже на компьютере в среде Matlab. Микроконтроллер используется только для опрашивания датчиков и отсылку данных на ПК (похожая ситуация и с манипулятором). В таком случае основной программный код, который подвергается изменениям и отладке, базируется в среде Matlab, что весьма удобно в процессе работы.
Хорошо, ориентацию, заданную кватернионом, мы получили. Что дальше по плану? А далее следует нахождение линейных координат объекта по данным акселерометра. Что ж, здесь лучше просто констатировать, что невозможно с нужной точностью по акселерометру определить координаты. Даже хотя бы находить изменение положения, которое было бы адекватным! Конечно, были попытки решить эту задачу, но в режиме реального времени находить координаты не получалось. Почему? Потому, что двойное дискретное интегрирование зашумленных показаний датчика приводила только к полёту в стратосферу, причём с бешеной скоростью, но никак не к положительному результату.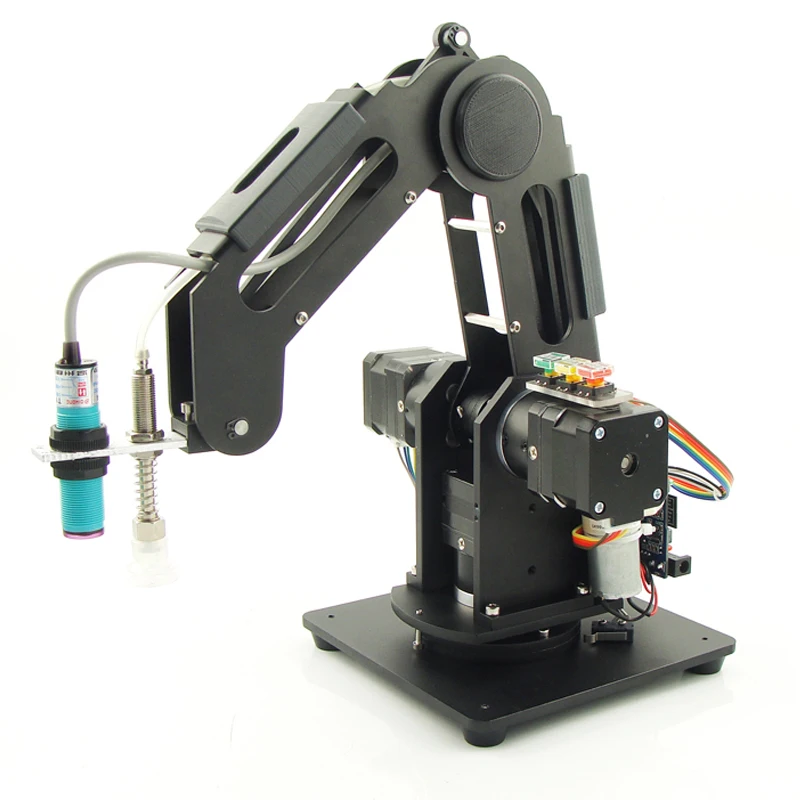 Поэтому обозначенный в начале пункта алгоритм я обрезал до момента нахождения ориентации, и на этом остановился.
Поэтому обозначенный в начале пункта алгоритм я обрезал до момента нахождения ориентации, и на этом остановился.
3. Всё остальное
Итак, вот я подобрался к заключительному этапу проектирования, вдоволь наигравшись с манипулятором и навертевшись IMU-сенсором. Работая над двумя предыдущими этапами я уже чётко представлял, как всё будет работать и по какому алгоритму. Поэтому с этим этапом я расправился достаточно быстро. Поскольку известна только ориентация ладони, то работаем непосредственно с рабочим органом, который требуется соответственно ориентировать. РО может принять любое направление, если оно не нарушает рабочую зону (вращаться на все 360 не получиться).
В пункте про разработку манипулятора вектор РО задавался вручную, и уже после находились углы поворота приводов. Так вот, этот вектор и нужно определить исходя из ориентации ладони руки. Ориентацию можно выразить базисом , найдя его, конвертировав кватернион в матрицу. Базис состоит из вектор-столбцов его орт, следовательно получаем три вектора , и .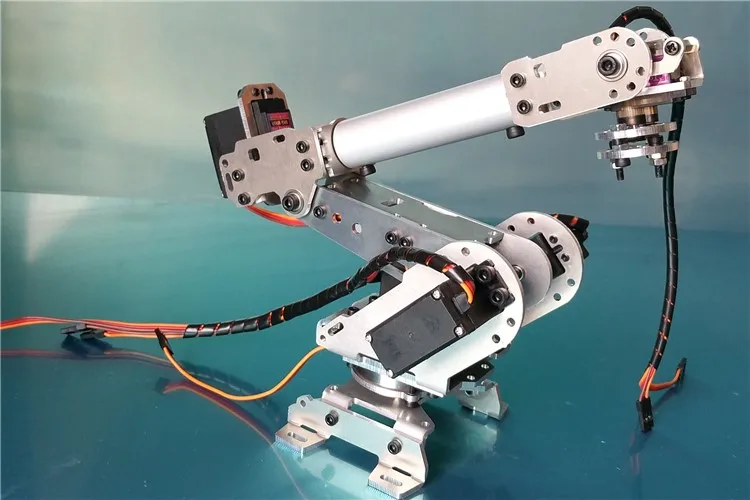 Будет удобным взять за ориентацию РО вектор , поскольку я предполагал такое начальное положение манипулятора, когда все звенья и РО расположены в плоскости XZ базовой системы координат, и РО в этот момент расположен горизонтально, т.е. вектор в начале сонаправлен с осью X БСК и НСК (начальное положение модуля БИНС располагаем так, чтобы НСК совпадала БСК манипулятора). В таком случае первый столбец матрицы приравниваем вектору . После нормируем его по длине РО и получаем требуемый вектор относительно базовой системы координат манипулятора. Затем следуем последовательности расчёта обобщённых координат из п. 1.
Будет удобным взять за ориентацию РО вектор , поскольку я предполагал такое начальное положение манипулятора, когда все звенья и РО расположены в плоскости XZ базовой системы координат, и РО в этот момент расположен горизонтально, т.е. вектор в начале сонаправлен с осью X БСК и НСК (начальное положение модуля БИНС располагаем так, чтобы НСК совпадала БСК манипулятора). В таком случае первый столбец матрицы приравниваем вектору . После нормируем его по длине РО и получаем требуемый вектор относительно базовой системы координат манипулятора. Затем следуем последовательности расчёта обобщённых координат из п. 1.
Стоит заметить, что манипулятор, при изменении ориентации РО, способен выполнить перемещение в двух режимах: первый – когда фланцевая точка неподвижна, второй – когда неподвижна конечная точка РО, но соблюдается его ориентация. Второй режим вызывает больше интереса, т.к. даже в отсутствии линейного перемещения всё равно задействованы все оси вращения для перемещения фланцевой точки, одновременно соблюдая ориентацию РО. Впрочем, переход от первого режима ко второму происходит с добавлением всего лишь одной операции вычитания векторов для нахождения вектора (см. п. 1).
Впрочем, переход от первого режима ко второму происходит с добавлением всего лишь одной операции вычитания векторов для нахождения вектора (см. п. 1).
Все выше описанные операции также программировались в среде Matlab. В общих чертах структура программы следующая:
- Калибровка при запуске. Устанавливаем всё хозяйство в исходное положение и не смея прикасаться калибруем модуль БИНС по некоторому количеству сырых данных с него. Калибровка необходима, поскольку нужно убрать начальное смещение, которое выдавал фильтр (я не стал разбираться почему, и так работало прекрасно).
- Начало скрипта. Инициализируем все библиотеки и переменные, задаёмся начальным положение фланцевой или конечной точки РО.
- Запуск цикла. На каждой итерации опрашиваем датчики, находим кватернион, переводим его в матрицу, которая есть базис , он же базис, в котором расположен РО. Первый столбец принимаем за ориентацию РО и находим все обобщенные координаты, используя математические соображения из п.
 1.
1. - Зная обобщенные координаты в прошлый момент времени и в настоящий, рассчитываем угловые скорости вращения осей.
- Отправляем пакет данных на микроконтроллер манипулятора.
Получилось конечно корявенько, но если приглянуться, то можно увидеть положительный результат исследования. Эта работа, безусловно, не претендует на законченную и требует ещё много усилий для доработки, но только в том случае, если этому можно найти применение. Но конкретное применение я ещё не нашёл… Может кто подскажет?
Механический город «Манипулятор на рельсах»
В продолжение захватывающей серии «Механический город» Ugears представляет новый конструктор: Манипулятор на рельсах.
Манипулятор предназначен для работы в доках Механического города, расположенных рядом с Фабрикой Роботов. Как и во всех других конструкторах Ugears, по окончании сборки игра только начинается: дополнительные элементы, подвижность модели, набор вариантов управления и режимов гарантируют не один час увлекательного досуга.
Описание модели
Кроме самой модели манипулятора, набор включает также дополнительные элементы: 2 пролёта рельсов, строящийся ангар, 2 грузовых ящичка с дверцами, подъемный кран, грузовой вагончик и пять персонажей.
Манипулятор представляет собой механическую клешню на платформе, установленной на рельсах. Клешня управляется с помощью трёх рычагов.
С помощью двух разных видов стыковочных креплений рельсовые пролёты соединяются двумя разными способами: параллельно или в одну линию. Особенно оригинальной сцену в доковом цехе манипулятора делает недостроенный псевдо-металлический ангар Индустриальной эпохи и сидящий на его балке Рабочий-высотник. Сцену дополняют Оператор с указателями в руках, системой сигналов помогающий управлять манипулятором, и двое Рабочих доков: с лопатой и разводным ключом.
Подъемный кран из набора собирается и разбирается одним движением.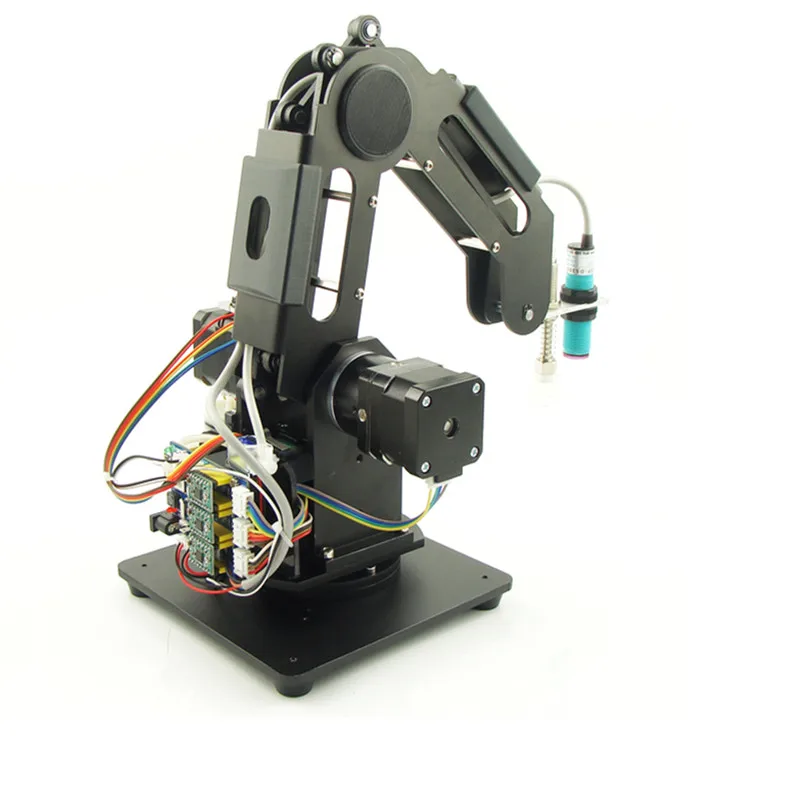 Дополнительные механизмы обеспечивают фиксацию поворота и угла подъемного крана даже под нагрузкой.
Дополнительные механизмы обеспечивают фиксацию поворота и угла подъемного крана даже под нагрузкой.
Оборудование цеха включает также Грузовой вагончик с откидными бортами. Вагончик предназначен для транспортировки материалов и грузов. В его кузов помещаются оба грузовых ящичка вместе с разобранным краном.
Как работает модель?
Клешня манипулятора устанавливается на платформе, которую можно вращать как вручную, так и с помощью поворотного вентиля. В передней части модели расположена кабина оператора с открывающейся защитной крышкой и регулируемым прожектором. Поворот кабины против часовой стрелки переключает режимы манипулятора:
В задней части модели находится рычаг для управления подъемом/опусканием и фиксацией четырех опорных лап, обеспечивающих дополнительную устойчивость модели во время управления клешнёй.
Режимы манипулятора
- исходное положение (режим Езды) — поворотная платформа клешни заблокирована, модель свободно перемещается по рельсам,
- поворот на 90 градусов (режим Свободный) — освобождается поворотная платформа клешни
- 180 градусов (режим Погрузки) — блокируются колёса модели и шестеренка на передней оси, которая цепляется за рейку на рельсах.

С помощью подвижной клешни Манипулятор может передвигать грузовые ящички с замечательной точностью – до 1 см.
Сборка конструктора
Механика манипулятора, основанная на существующих рабочих машинах, даст вам практическое представление о работе подобного оборудования. А если вы хотите еще сильнее расширить возможности модели и сделать игру еще более увлекательной, попробуйте задействовать прицепные отверстия и состыкуйте манипулятор с другими моделями Ugears.
Механическая модель изготовлена из качественной фанеры и полностью укомплектована всем необходимым для сборки. Вам не понадобится клей или специальные инструменты. Собирается модель по иллюстрированной инструкции с пояснениями на 11 языках (украинском, английском, немецком, французском, польском, испанском, русском, турецком, итальянском, китайском и корейском).
Дизайн механики – удаленный манипулятор предметов
Дизайн механики был одним из первых направлений нашей команды при работе над этим проектом.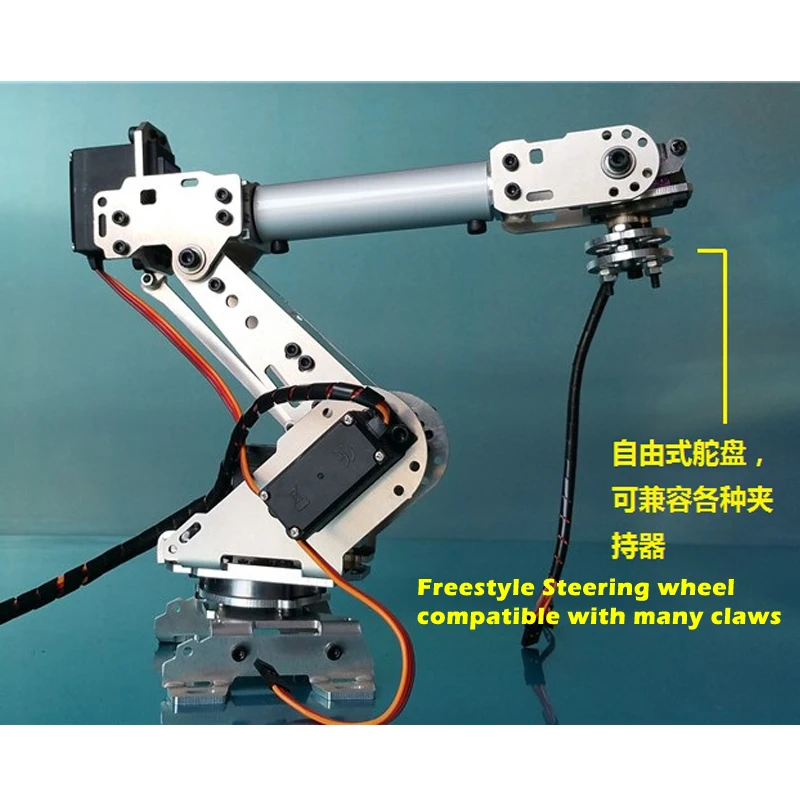 Мы знали, что потребуется значительный объем моделирования и изготовления, и ниже вы найдете конкретные темы, которые рассматривались на протяжении всего процесса.
Мы знали, что потребуется значительный объем моделирования и изготовления, и ниже вы найдете конкретные темы, которые рассматривались на протяжении всего процесса.
Основные размеры RIM представлены ниже:
Максимальный радиус действия RIM составляет 25,5 дюймов.
Почему шесть степеней свободы?
Количество степеней свободы (DoF) было одним из наших основных соображений, когда мы начинали наш проект. DoF относится к числу направлений, в которых может происходить движение; таким образом, наличие 6 степеней свободы означает, что у нас есть 6 вращательных суставов, которые могут двигаться независимо. Точка в пространстве может быть описана многими способами, но для того, чтобы зафиксировать как ее положение, так и ее положение при вращении (или ориентацию), должно быть не менее 6 степеней свободы. В конечном счете, мы хотели, чтобы оператор RIM мог держать контроллер движений, а рука имитировала положение и ориентацию его или ее руки. Вот почему мы решили построить систему с 6 степенями свободы.
Расположение суставов RIM можно увидеть слева. Обратите внимание, что есть 6 суставов, представляющих 6 степеней свободы. Это позволяет руке достичь определенного положения и ориентации.
Шаговые двигатели
Как и многие другие роботы-манипуляторы, представленные в настоящее время на рынке, мы решили использовать технологию шаговых двигателей вместо других средств преобразования электроэнергии во вращательное движение. Мы выбрали шаговые двигатели, потому что они предлагали более высокий крутящий момент на более низких скоростях, и мы могли получить желаемую точность. Эти преимущества в сочетании с их относительно низкой стоимостью сделали этот выбор легким.
Были проведены обширные расчеты, чтобы определить, какие шаговые двигатели мы собираемся купить. Нам нужно было убедиться, что двигатели могут обеспечивать достаточный крутящий момент при удержании нагрузки и во время движения. Мы увеличили выходной крутящий момент двигателя и их позиционное разрешение за счет использования планетарных редукторов, установленных на каждом двигателе. Пример одного из этих двигателей с коробкой передач можно увидеть слева.
Пример одного из этих двигателей с коробкой передач можно увидеть слева.
Разделение руки на секции
RIM можно разбить на 7 отдельных твердых тел. Шарниры вращения расположены между каждым твердым телом; таким образом, имеется 6 суставов и 6 степеней свободы. Каждое твердое тело можно рассматривать как одну большую часть, которая движется относительно других секций. Это соглашение широко использовалось в процессе проектирования.
Секции можно увидеть ниже:
End Effector (Red)
Запястья (фиолетовый)
Forearm (Blue)
Elbow (Turquoise)
(Green)
Плечо (желтое)
Основание (оранжевое)
Построение RIM в SOLIDWORKS процесс построения RIM в SOLIDWORKS.
 Наша модель изначально была создана как инструмент для визуализации того, как будет выглядеть рука, но она быстро стала одним из наших наиболее важных инструментов проектирования.
Наша модель изначально была создана как инструмент для визуализации того, как будет выглядеть рука, но она быстро стала одним из наших наиболее важных инструментов проектирования.
Мы использовали модель для оценки веса каждой части. Эти веса затем использовались в расчетах, чтобы помочь нам выбрать правильные двигатели.
Другим инструментом SOLIDWORKS, который мы использовали, является Finite Element.
Анализ (FEA). Это помогло нам определить, были ли наши детали правильно
разработан для нагрузки, которую мы ожидали от них испытать. Эти анализы также
повлияло на наше решение относительно того, какие материалы мы собирались
использовать.
Построение трехмерной модели в SOLIDWORKS позволило нам создать технические чертежи для каждой детали, которую мы планировали обработать.
После многих месяцев итераций проектирования мы подошли к окончательной сборке RIM. Эта сборка полной руки включала 7 подузлов секций, описанных выше.
Здесь можно найти хранилище файлов САПР RIM.
Процесс изготовления
Получив качественную CAD-модель и чертежи наших деталей, мы смогли приступить к процессу изготовления. Мы использовали множество методов, чтобы получить наилучшие результаты для проекта. Большинство деталей было изготовлено из алюминия; однако есть один стальной вал и один вал из углеродного волокна. Мы также использовали детали из пластика PLA, напечатанные на 3D-принтере, чтобы уменьшить вес и снизить стоимость там, где это было возможно.
Осенью мы начали наш проект с прототипа снижения рисков. Цель состояла в том, чтобы пройти через процесс проектирования и изготовления одного из шести шарниров, которые в конечном итоге должны были стать RIM. Это позволило нам начать изучать шаговые двигатели и преподало нам ценные уроки относительно того, как мы должны спроектировать наши следующие пять шарниров.
Мы изготавливали наши алюминиевые детали на традиционном фрезерном станке с приводными осями x и y. Деталь, показанная справа, представляет собой шпиндель, который крепится ко второму двигателю и основному компоненту рычага RIM.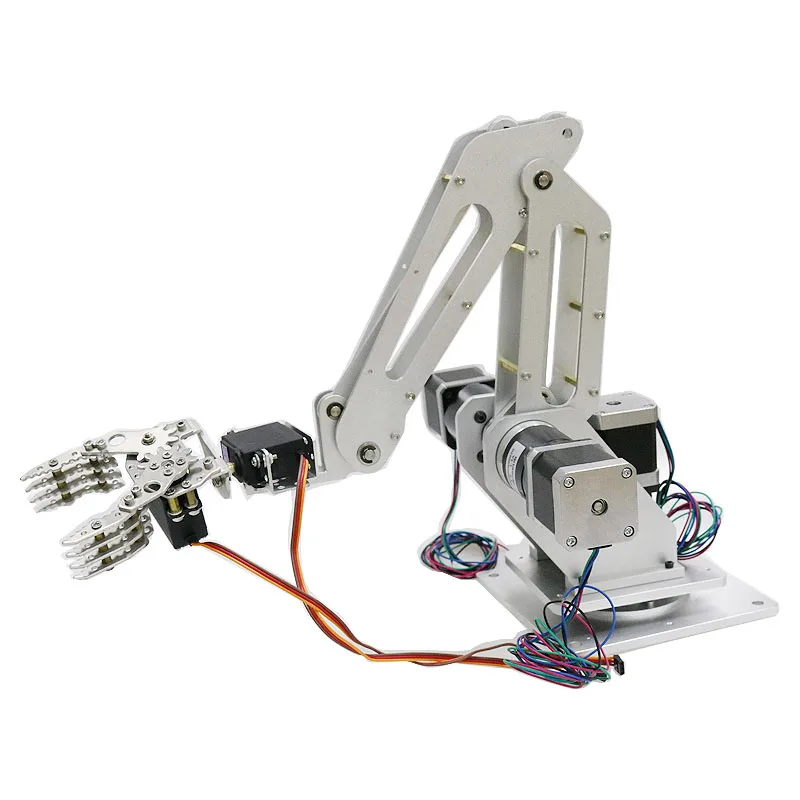
Слева показана готовая часть шпинделя. Это лишь одна из многих деталей, которые необходимо было обработать для проекта.
Мы хотели бы выразить особую благодарность Карсону Миллеру за то, что он потратил много часов своего времени и ресурсов, чтобы помочь нам успешно изготовить RIM.
Тестирование с помощью лазерной КИМ
Одной из наших технических спецификаций для RIM была возможность неоднократно приближаться к целевому положению с помощью концевого зажима. В спецификации указано, что концевой эффектор должен прибыть в пределах ± 1,00 дюйма от своей целевой точки и должен быть в пределах ± 0,10 дюйма от своей цели. В итоге мы достигли порога этой спецификации со средним отклонением 0,2613″ ± 0,0400″.
В процессе, который мы использовали для тестирования, использовалась портативная координатно-измерительная машина (КИМ).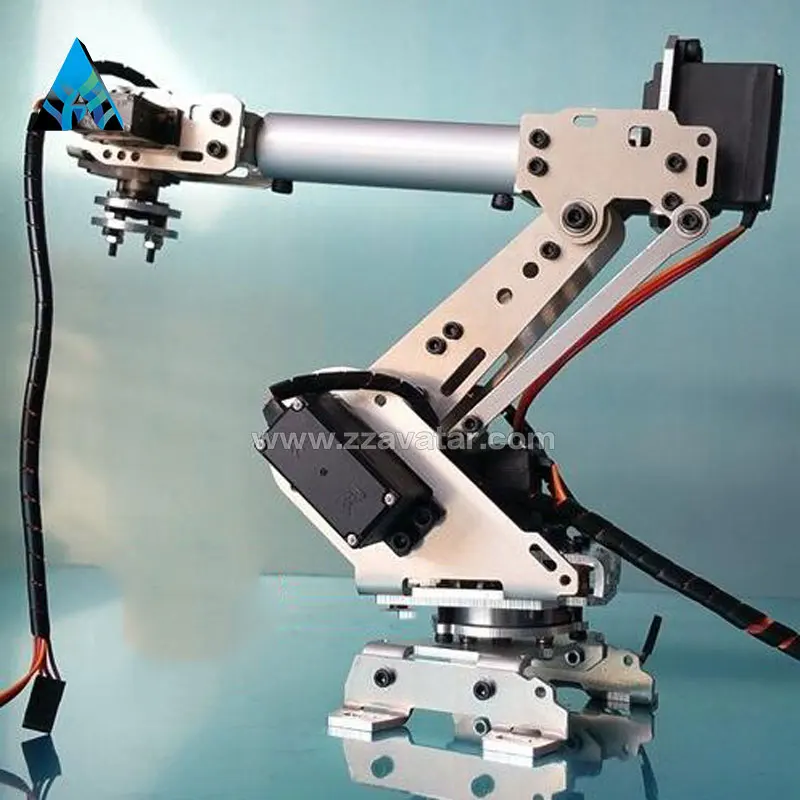 Эта машина может определить систему координат, откалиброванную для нашего устройства, а затем отслеживать положение концевого эффектора. Мы проверили приближение руки к 5 независимым точкам по 20 раз в каждой. Каждый раз мы записывали конечное положение конечного эффектора, которое затем сравнивали с исходным целевым положением.
Эта машина может определить систему координат, откалиброванную для нашего устройства, а затем отслеживать положение концевого эффектора. Мы проверили приближение руки к 5 независимым точкам по 20 раз в каждой. Каждый раз мы записывали конечное положение конечного эффектора, которое затем сравнивали с исходным целевым положением.
Мы прикрепили к RIM набор тщательно откалиброванных зеркал. Это цели, которые лазерный трекер фиксирует и измеряет.
Рабочие места механического манипулятора | Дж. Мех. Дес.
Пропустить пункт назначения навигации
Научно-исследовательские работы
А. Кумар,
К. Дж. Уолдрон
Информация об авторе и статье
Дж. Мех. Дез . июль 1981 г., 103(3): 665-672 (8 страниц)
https://doi.org/10.1115/1.3254968
Опубликовано в Интернете: 1 июля 1981 г.
История статьи
Получено:
1 июня 1980 г.
Онлайн:
17 ноября 2009 г.
Взгляды
- Содержание артикула
- Рисунки и таблицы
- Видео
- Аудио
- Дополнительные данные
- Экспертная оценка
Делиться
- Твиттер
- MailTo
Иконка Цитировать
ЦитироватьРазрешения
Поиск по сайту
Ссылка
Кумар А. и Уолдрон К. Дж. (1 июля 1981 г.). «Рабочие места механического манипулятора». КАК Я. Дж. Мех. Дез . июль 1981 г .; 103(3): 665–672. https://doi.org/10.1115/1.3254968
и Уолдрон К. Дж. (1 июля 1981 г.). «Рабочие места механического манипулятора». КАК Я. Дж. Мех. Дез . июль 1981 г .; 103(3): 665–672. https://doi.org/10.1115/1.3254968
Скачать файл цитаты:
- Рис (Зотеро)
- Менеджер ссылок
- EasyBib
- Подставки для книг
- Менделей
- Бумаги
- Конечная примечание
- РефВоркс
- Бибтекс
- Процит
- Медларс
панель инструментов поиска
Расширенный поиск
Представлена новая теория и результирующий алгоритм трассировки ограничивающих поверхностей рабочих пространств механического манипулятора. Также изучается природа многочисленных сингулярных конфигураций и способы их размещения в алгоритме. Чтобы отсортировать интересующие поверхности из большого числа возможных решений, также представлена численно реализуемая техника маркировки.
