

Содержание
Электронный ассистент Lane Assist в автомобилях Volkswagen, видео
Новейшие технологические разработки прочно вошли в нашу жизнь и ежедневно обретают новые сферы для применения. Одной из таких разработок, которые все чаще используются в современных моделях авто, являются электронные ассистенты.
Основная их функция заключается в помощи и подсказках для водителя в процессе управления. Применяются такие электронные помощники системы активной безопасности в машинах автоконцерна: Passat B8, Passat СС, Tiguan, Touareg.
Особой важностью отличается контроль со стороны электронной системы Lane Assist при движении автомобиля. Наиболее значимо это для водителей, которым приходится ездить на большие расстояния, когда накапливается усталость и снижается внимательность.
Длинная поездка тяжела для любого человека. Усталость постепенно накапливается, из-за чего организм начинает ощущать сильную перегрузку. Из-за переутомления могут снижаться показатели внимания и скорость реакций. При движении на серьезной скорости одна секунда может стать решающей и привести к фатальным последствиям. Водитель запросто может выехать на обочину или встречную полосу из-за обычной усталости, а съезд с полосы движения нередко становится причиной аварии.
Усталость постепенно накапливается, из-за чего организм начинает ощущать сильную перегрузку. Из-за переутомления могут снижаться показатели внимания и скорость реакций. При движении на серьезной скорости одна секунда может стать решающей и привести к фатальным последствиям. Водитель запросто может выехать на обочину или встречную полосу из-за обычной усталости, а съезд с полосы движения нередко становится причиной аварии.
Электронный помощник Lane Assist, контролирующий движение, корректирует рулевое управление авто и позволяет ему оставаться на нужной полосе.
Как действует Лайн Ассист?
Как только скорость машины пересекает рубеж в 65 км/ч, происходит автоматическое включение Lane Assist. О том, что система включена, водитель узнает по сигналу — загорается желтым цветом лампочка-датчик на приборной панели.
Чтобы контролировать рулевое управление, камере системы необходимо выполнить идентификацию дорожной разметки. Эта камера размещается во внутреннем зеркале заднего вида. Она может контролировать движение машины, отследив дорожную разметку и корректируя расположение автомобиля относительно этой разметки. Как только разметка на дороге была зафиксирована камерой, лампочка на панели меняет свой цвет на зеленый. Это говорит о полной рабочей готовности системы.
Эта камера размещается во внутреннем зеркале заднего вида. Она может контролировать движение машины, отследив дорожную разметку и корректируя расположение автомобиля относительно этой разметки. Как только разметка на дороге была зафиксирована камерой, лампочка на панели меняет свой цвет на зеленый. Это говорит о полной рабочей готовности системы.
Стоит лишь водителю отвлечься и увести авто от линии разметки на дороге, как Lane Assist начинает коррекционные действия. Ассистент подруливает в противоположную сторону, причем начинает это делать заранее, пока автомобиль еще не успел пересечь линию разметки между полосами. В этом и заключается его работа.
Чтобы привлечь внимание водителя:
- Рулевое колесо начинает слегка вибрировать.
- Появляется звуковой сигнал.
- На дисплей компьютера поступает сообщение о необходимости быть более внимательным и осторожным.
Как отключить Лайн Ассист?
Если водитель не реагирует, ассистент выключается сам спустя восемь секунд. Если машина движется со скоростью меньше 60 км/ч, или когда помощник не может справиться с поворотом, то последует сигнал водителю в виде вибрирующего рулевого колеса. В такой ситуации контроль должен осуществлять сам водитель.
Если машина движется со скоростью меньше 60 км/ч, или когда помощник не может справиться с поворотом, то последует сигнал водителю в виде вибрирующего рулевого колеса. В такой ситуации контроль должен осуществлять сам водитель.
Деактивировать систему Lane Assist можно, немного повернув рулевое колесо в обратную сторону. При включении левого или правого поворота перед маневром ассистент тоже не будет активен.
Автоцентр Сити — Каширка Volkswagen
7 495 741 45 45
Москва, Внешняя сторона МКАД, 23 км
пн.-пт.: 08:00-21:00
сб.: 08:00-21:00
вс.: 08:00-19:00
«Рентген» для автомобилей и поездов
Фото: Александр Уткин
Современные технологии позволяют отказаться от «контактных» проверок грузов на пунктах пропуска через госграницу, сократив время досмотра большой фуры до считанных минут. Новейшие инспекционно-досмотровые комплексы (ИДК) в буквальном смысле «видят» груз сквозь стены и способны обнаружить запрещенные товары любого размера. Такие устройства сканируют грузовые и легковые автомобили, и даже огромные вагоны. Как помогают нести службу таможенникам эти «умные системы» – в нашем материале.
Новейшие инспекционно-досмотровые комплексы (ИДК) в буквальном смысле «видят» груз сквозь стены и способны обнаружить запрещенные товары любого размера. Такие устройства сканируют грузовые и легковые автомобили, и даже огромные вагоны. Как помогают нести службу таможенникам эти «умные системы» – в нашем материале.
Сделать тайное явным
Посылки, контейнеры, багаж – любой груз, пересекающий государственную границу, проходит таможенный контроль. В наши дни с помощью современной техники содержимое груза можно проверить, даже не вскрыв его упаковку. Вспомните, как наша ручная кладь в аэропорту проходит «рентген» на ленте. Содержимое сумок и чемоданов действительно сканируют при помощи рентгеновского излучения. На экране отображается не совсем понятная нам цветная картинка. Специалисту же все легко расшифровать: оранжевый цвет – это органические материалы, синий – неорганические, зеленый – смешанные. Но что делать, если груз измеряется тоннами и перевозится не в чемоданах, а в фурах или вагонах? В таком случае на помощь таможенникам приходят инспекционно-досмотровые комплексы (ИДК).
Разработчиком и производителем первых российских ИДК стала «Росэлектроника». В соответствии с распоряжением правительства этот холдинг Ростеха определен единственным исполнителем госконтракта с ФГКУ Росгранстрой на оборудование железнодорожными ИДК пунктов пропуска «Пограничный» и «Нижнеленинское» через российско-китайскую границу. «Росэлектроника» совместно с Росгранстроем занимается активной модернизацией пунктов пропуска и оснащает их самыми современными средствами контроля. Инспекционно-досмотровые комплексы «Росэлектроники» уже установлены на границе с Литвой, Киргизии с Узбекистаном, Таджикистана с Китаем.
Фото: Александр Уткин
ИДК позволяют за считанные минуты, не вскрывая грузовые помещения транспортных средств, получать их рентгеновские изображения с перевозимым в них товаром. Современное досмотровое оборудование обнаруживает даже малые тайники и скрытые вкладки в грузе весом десятки тонн. При этом железнодорожный транспорт не нужно останавливать – вагоны можно досматривать в движении на скорости до 70 км/час, что ускоряет процесс пограничного контроля. Комплекс «видит» насквозь через сталь толщиной до 32 см, и он не просто дает высококачественное радиоскопическое изображение содержимого, а распознает объекты по составу вещества. Поэтому вычислить за считанные минуты наркотики, взрывчатку или контрабандный трепанг не составляет труда. Еще одно конкурентное преимущество разработки перед аналогами – возможность дистанционной оценки веса всей товарной партии или ее части с погрешностью не более 10%.
Комплекс «видит» насквозь через сталь толщиной до 32 см, и он не просто дает высококачественное радиоскопическое изображение содержимого, а распознает объекты по составу вещества. Поэтому вычислить за считанные минуты наркотики, взрывчатку или контрабандный трепанг не составляет труда. Еще одно конкурентное преимущество разработки перед аналогами – возможность дистанционной оценки веса всей товарной партии или ее части с погрешностью не более 10%.
Свою «профпригодность» инспекционно-досмотровые комплексы успели продемонстрировать на практике. К примеру, с помощью ИДК были зафиксированы попытки провезти почти 50 килограммов черной икры в топливном баке автомобиля и около тонны наркотиков, замурованных в стрелу экскаватора. Благодаря использованию инспекционно-досмотровых комплексов пресекаются незаконной перевозки оружия и боеприпасов, валюты, изделий из драгоценных металлов и других нелегальных грузов.
Как проверить вагоны на ходу
«Росэлектроника» установила ИДК СТ-2630Т для досмотра поездов в Забайкальске – крупнейшем железнодорожном пункте пропуска на границе с Китаем. На его долю приходится более половины всех перевозок из России в Китай и обратно. Отсюда грузы поступают не только в Россию, но и направляются в страны Евросоюза, в том числе, в рамках реализации международного проекта «Экономический пояс Великого шелкового пути».
На его долю приходится более половины всех перевозок из России в Китай и обратно. Отсюда грузы поступают не только в Россию, но и направляются в страны Евросоюза, в том числе, в рамках реализации международного проекта «Экономический пояс Великого шелкового пути».
Внешне ИДК для железнодорожных вагонов представляет собой бетонный периметр со встроенными отсеками для источника излучения и системы детектирования.
Фото: РЭК Ростеха
Высокую проникающую способность излучения обеспечивает линейный ускоритель электронов, «сердцем» которого является мощный СВЧ-клистрон производства НПП «Торий» (входит в «Росэлектронику»).
«Рентген» на колесах
Принцип работы стационарного инспекционно-досмотрового комплекса СТ-6035 для автотранспорта такой же, только размеры поскромнее. Машина въезжает в одни ворота досмотрового туннеля, а выезжает через другие. Внутри туннеля находятся рельсы для перемещения передвижной рамы высотой почти 5 метров. Именно она выступает в роли сканера с рентгеновым излучением. Комплекс способен точно распознавать материалы с проникающей способностью по стали до 40 см. Досмотр одного грузовика может занять примерно три минуты. При этом проектная пропускная способность ИДК составляет не менее 20 транспортных средств в час.
Именно она выступает в роли сканера с рентгеновым излучением. Комплекс способен точно распознавать материалы с проникающей способностью по стали до 40 см. Досмотр одного грузовика может занять примерно три минуты. При этом проектная пропускная способность ИДК составляет не менее 20 транспортных средств в час.
Большое внимание при разработке ИДК уделяется радиационной безопасности. Во-первых, обеспечивается защита операторов на уровне требований для населения, то есть допускается дополнительная годовая доза не более 1 мЗв. Кроме того, система мониторинга дает разрешение на включение генератора только при соблюдении мер безопасности. Например, невозможно включение генерации излучения при открытой двери входа в досмотровый туннель. Конечно, водители грузовиков в этот момент ни в коем случае не должны находиться внутри туннеля – они ожидают окончания проверки в специальном помещении.
Фото: РЭК Ростеха
Таким образом, добросовестным и законопослушным водителям бояться точно нечего.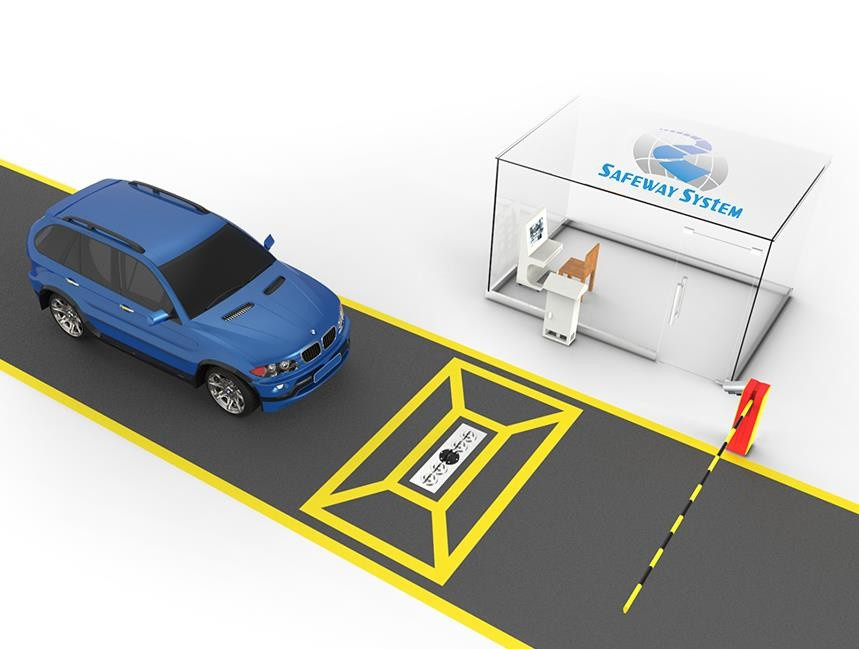 А вот тем, кто везет контрабанду, нужно быть готовым быть обнаруженным и ответить по закону. Однако мошенники продолжают придумывать все более изощренные схемы, как «провести» сотрудников таможенной службы и средства досмотра. «Росэлектроника» следит за развитием технологий в средствах таможенного контроля и отвечает новыми разработками.
А вот тем, кто везет контрабанду, нужно быть готовым быть обнаруженным и ответить по закону. Однако мошенники продолжают придумывать все более изощренные схемы, как «провести» сотрудников таможенной службы и средства досмотра. «Росэлектроника» следит за развитием технологий в средствах таможенного контроля и отвечает новыми разработками.
К примеру, в прошлом году холдинг впервые представил мобильный инспекционно-досмотровый комплекс нового поколения на базе автомобиля КАМАЗ. Тогда глава Ростеха Сергей Чемезов лично ознакомил с возможностями новой машины министра транспорта России Евгения Дитриха, руководителя Федеральной таможенной службы РФ Владимира Булавина и первого заместителя директора ФСБ России – руководителя Пограничной службы ФСБ России Владимира Кулишова.
Фото: Александр Уткин
Преимущество мобильного ИДК – его подвижность, отличная проходимость, возможность оперативно развернуть работу в любом месте. Алгоритм комплекса способен автоматически «вычитать» стенки контейнера, чтобы исключить возможность «закладок» в металлическом корпусе.
Алгоритм комплекса способен автоматически «вычитать» стенки контейнера, чтобы исключить возможность «закладок» в металлическом корпусе.
Производство ИДК такого уровня смогли освоить всего несколько стран в мире. При этом «Росэлектроника» не приостанавливает работу по наращиванию технических возможностей собственных комплексов. Например, сейчас создается система автоматического анализа рентгеноскопических изображений с технологиями искусственного интеллекта, где человеческий фактор при досмотре будет сведен к нулю.
Руководство покупателя быстрых радиоуправляемых автомобилей, грузовиков, багги и многого другого!
Опубликовано: 12.04.22
Один из наиболее часто задаваемых вопросов о радиоуправляемых автомобилях и грузовиках: «Как быстро они едут?» Доступно огромное количество радиоуправляемых автомобилей, в том числе те, которые могут развивать скорость 50, 60 или даже 70 миль в час. Вы также можете найти быстрые радиоуправляемые автомобили, способные развивать трехзначную скорость, если они оснащены дополнительными деталями, высокопроизводительной электроникой и батареями.
Вы также можете найти быстрые радиоуправляемые автомобили, способные развивать трехзначную скорость, если они оснащены дополнительными деталями, высокопроизводительной электроникой и батареями.
Эти цифры относятся к фактической скорости. Из-за своего размера модели легковых и грузовых автомобилей с дистанционным управлением выглядят намного быстрее. Радиоуправляемый автомобиль в масштабе 1/8, движущийся с фактической скоростью 60 миль в час, будет казаться, что он движется со скоростью более 170 миль в час!
Новичкам в радиоуправляемом хобби не стоит выбирать что-то настолько быстрое для своей первой радиоуправляемой машины. Высокоскоростные радиоуправляемые автомобили требуют хороших рефлексов и навыков управления. Но если вы готовы к испытаниям, вы можете найти быстрые радиоуправляемые автомобили и грузовики в каждой категории транспортных средств. Наши эксперты предоставили следующие рекомендации для моделей, которые обеспечивают самые захватывающие скорости для своего типа.
Лучшие радиоуправляемые автомобили для бездорожья
Losi® TENACITY® DB Pro в масштабе 1/10 Полноприводный пустынный багги
Если вам нужен быстрый радиоуправляемый внедорожник, который также имеет реалистичный масштаб, ознакомьтесь с готовыми Полноприводный пустынный багги Losi TENACITY DB Pro в масштабе 1/10. TENACITY DB Pro — это эволюция Team Losi Racing® TEN, одной из самых прочных и высокопроизводительных внедорожных платформ из когда-либо созданных. Быстрый радиоуправляемый багги TENACITY DB прямо из коробки оснащен бесщеточной системой питания Spektrum™, способной развивать скорость до 50 миль в час или выше при использовании 3-элементной батареи LiPo. Он выглядит так же быстро, как и едет, с кузовом, вдохновленным полномасштабными пустынными багги, официально лицензированными схемами отделки салона Fox Racing и Lucas Oil, а также шинами Falken Wildpeak MT на колесах Method. TENACITY DB выделяется, когда мчится по заднему двору или взрывает уступы пустыни!
ARRMA® TALION™ 6S BLX Extreme Bash Truggy в масштабе 1/8
Для более крупного внедорожника с еще большим скоростным потенциалом бренд ARRMA предлагает несколько рекомендуемых вариантов. TALION 6S BLX Extreme Bash Speed Truggy в масштабе 1/8 заслужил признание, став первым готовым к эксплуатации автомобилем ARRMA EXB (EXtreme Bash), оснащенным радиостанцией Spektrum и бесколлекторной системой питания 6S. С таким оборудованием этот быстрый трагги на радиоуправлении дает вам силу, чтобы мчаться по грязи, асфальту и траве со скоростью 70+ миль в час. Технология радиостанции AVC® (Active Vehicle Control) также обеспечивает автоматическую помощь в управлении, помогая вам сохранять контроль при движении на таких высоких скоростях.
TALION 6S BLX Extreme Bash Speed Truggy в масштабе 1/8 заслужил признание, став первым готовым к эксплуатации автомобилем ARRMA EXB (EXtreme Bash), оснащенным радиостанцией Spektrum и бесколлекторной системой питания 6S. С таким оборудованием этот быстрый трагги на радиоуправлении дает вам силу, чтобы мчаться по грязи, асфальту и траве со скоростью 70+ миль в час. Технология радиостанции AVC® (Active Vehicle Control) также обеспечивает автоматическую помощь в управлении, помогая вам сохранять контроль при движении на таких высоких скоростях.
Скоростной багги ARRMA TYPHON™ 6S BLX 4WD в масштабе 1/8
Любителям больших и быстрых радиоуправляемых внедорожных багги стоит взглянуть на готовый к эксплуатации скоростной багги ARRMA TYPHON 6S BLX 4WD в масштабе 1/8. . Как и TALION, он также включает в себя бесщеточную систему питания Spektrum для потенциальной скорости 70+ миль в час с использованием батареи 6S LiPo и рекомендуемой дополнительной высокоскоростной шестерни. TYPHON также поставляется с 3-канальным радиоприемником Spektrum SLT3™ с ограничением газа. Эта функция позволяет ограничить дроссельную заслонку только 50% или 75% полной скорости автомобиля, чтобы вы могли постепенно приобретать навыки быстрого вождения RC.
TYPHON также поставляется с 3-канальным радиоприемником Spektrum SLT3™ с ограничением газа. Эта функция позволяет ограничить дроссельную заслонку только 50% или 75% полной скорости автомобиля, чтобы вы могли постепенно приобретать навыки быстрого вождения RC.
Лучший радиоуправляемый автомобиль для движения по дорогам и бездорожью
ARRMA VENDETTA™ 4X4 3S BLX в масштабе 1/8 Speed Racer
Ищете быстрый радиоуправляемый автомобиль, на котором можно ездить как по гладким поверхностям, так и по бездорожью дорога? Для такой универсальности наши эксперты выбрали готовый к эксплуатации ARRMA VENDETTA 4X4 3S BLX Speed Racer в масштабе 1/8. VENDETTA хорошо движется по дорожным покрытиям, а благодаря высокому дорожному просвету она также может преодолевать неровности улиц, лежачих полицейских, плоскую грязь и другие легкие бездорожные покрытия. Что касается скорости — с системой питания Spektrum, поставляемой опциональной шестерней и аккумулятором 3S LiPo, VENDETTA способна разогнаться до 70+ миль в час прямо из коробки.
Крылья с высокой и низкой прижимной силой на аэродинамически настроенном кузове удерживают его на трассе. Внедорожные шины dBoots® Hoons Elevens обладают невероятным сцеплением на любых поверхностях, а большой задний двойной диффузор снижает турбулентность и сопротивление. В результате VENDETTA — это быстрый радиоуправляемый автомобиль, на котором могут успешно участвовать большинство водителей среднего уровня.
Лучшее радиоуправляемое транспортное средство для скоростных заездов
ARRMA LIMITLESS™ 1/7 Масштаб 4WD Speed Bash Roller
Опытные водители часто хотят самостоятельно выбирать электронику для своих быстрых радиоуправляемых автомобилей. Если это вы, взгляните на ARRMA LIMITLESS 1/7 Scale 4WD Speed Bash Roller. Это отличный вездеход на радиоуправлении, который можно настроить на любую скорость и мощность, как вы пожелаете, в зависимости от вашего выбора необходимого оборудования — передатчика и приемника, рулевого сервопривода, электронной регулировки скорости, двигателя и одного или двух аккумуляторов.
LIMITLESS Speed Basher превосходен на всех дорогах, в любых условиях, включая рыхлый гравий, асфальт или короткую траву, солнце, дождь и даже лед. Он имеет кузов с низким сопротивлением и передними и задними крыльями, которые можно настроить так, чтобы прижимная сила соответствовала вашим предпочтениям. Для дальнейшего улучшения аэродинамики шасси оснащено передним сплиттером, который уравновешивает распределение прижимной силы, и задним диффузором, который увеличивает прижимную силу и сцепление с дорогой, позволяя вам быстро и уверенно проходить повороты.
Лучший радиоуправляемый автомобиль для Fast Rock Racing
Axial® RBX10™ Ryft™ 4WD
Скорость и способность преодолевать подъемы являются приоритетами в мире скалолазания. Полноразмерные вышибалы отказываются останавливаться или сбавлять обороты, когда сталкиваются с крутыми подъемами и массивными камнями. То же самое относится и к готовому к запуску скоростному рок-гонщику Axial RBX10 Ryft 4WD RC.
Ryft подходит для начинающих и опытных водителей радиоуправления, которых привлекает стиль езды по бездорожью с прыжками по скалам. Его прочное, изготовленное на заказ трубчатое шасси выдерживает сильные удары при движении по грязи, гравию, камням и многому другому на высоких скоростях, создаваемых бесщеточным двигателем с поддержкой 4S. Эти функции, наряду с постоянной трансмиссией 4WD и системой контроля тяги AVC, делают RBX10 Ryft захватывающим радиоуправляемым автомобилем для подъема по холмам, спуска с уступов и движения по тропам на полном газу.
Лучший радиоуправляемый автомобиль для больших скоростей
ARRMA KRATON™ 8S BLX 4WD Speed Monster Truck
Готовый к эксплуатации ARRMA KRATON 8S BLX 4WD Speed Monster Truck в масштабе 1/5 представляет собой тройную угрозу — быстрый, огромный и спроектированный для грубой силы и прочности. Имея длину более двух с половиной футов, с потенциалом скорости 55+ миль в час, используя две батареи 4S LiPo и дополнительную шестерню, это идеальный быстрый крупногабаритный радиоуправляемый монстр-трак для опытных водителей, заинтересованных в громких гонках.
Мало того, что скорость KRATON удивительна, вы сможете использовать все это. Входящее в комплект поставки радиооборудование Spektrum позволяет повысить устойчивость с помощью системы AVC (Active Vehicle Control), чтобы срезать повороты и совершать прыжки, не отпуская педаль газа. Кроме того, он позволяет вам в полной мере воспользоваться инновационной технологией телеметрии, используемой в бесколлекторном двигателе Spektrum SMART Firma™ и ESC.
Лучший радиоуправляемый автомобиль для гоночной скорости
Team Losi Racing® 22X-4™ 1/10 4WD Buggy Race Kit
Сказать, что гоночный комплект Team Losi Racing 22X-4 4WD Buggy Race Kit в масштабе 1/10 ориентирован на производительность и готов к подиуму, будет преуменьшением. Его скоростные возможности были доказаны, когда он доминировал и выиграл национальный чемпионат ROAR 2021 года. Сорок лет разработки 22X-4 — это быстрый радиоуправляемый багги, на котором строятся мечты гонщиков!
Команда инженеров Team Losi Racing разработала платформу 22X-4 с нуля с легкой конструкцией и надежным карданным валом. Его длинный список впечатляющих функций включает в себя полностью регулируемую подвеску, регулируемое положение двигателя и аккумулятора, множество компонентов из углеродного волокна и многое другое. Максимальная скорость зависит от выбора водителем мотора, ESC и аккумулятора 2S. Модель 22X-4 является основой для быстрых гонок на багги.
Его длинный список впечатляющих функций включает в себя полностью регулируемую подвеску, регулируемое положение двигателя и аккумулятора, множество компонентов из углеродного волокна и многое другое. Максимальная скорость зависит от выбора водителем мотора, ESC и аккумулятора 2S. Модель 22X-4 является основой для быстрых гонок на багги.
Лучшее радиоуправляемое транспортное средство для скорости на бензине
Losi DBXL 2.0 Полноприводный газовый багги в масштабе 1/5
По скорости, размеру и реализму на бензине трудно превзойти готовый к эксплуатации Losi DBXL 2.0 . Приближаясь к метру в длину и веся более 34 фунтов, этот быстрый багги в масштабе 1/5 с ревущим двигателем Zenoah® 32cc доставляет громкое и гордое удовольствие от бездорожья. Воздушный фильтр с высокой пропускной способностью позволяет двигателю «дышать» для достижения максимальной мощности. Постоянная 5-мм трансмиссия 4WD, коробки передач и сверхпрочная конструкция позволяют ему измельчать местность на баллистических скоростях. Losi DBXL 2.0 4WD Gas RTR — это непревзойденная скорость и азарт крупномасштабного вождения на радиоуправлении.
Losi DBXL 2.0 4WD Gas RTR — это непревзойденная скорость и азарт крупномасштабного вождения на радиоуправлении.
Готовы к быстрой радиоуправляемой машине?
Автомобили и грузовики на радиоуправлении, упомянутые в этой статье, настоятельно рекомендуются из-за их встроенных высокоскоростных возможностей. Добавляя дополнительные детали и улучшения, а также экспериментируя с различными настройками мощности, вы можете заставить почти любую быструю радиоуправляемую машину ехать еще быстрее. Начните с выбора автомобиля, который подходит для вашего стиля вождения. Тогда нажмите на газ и получайте удовольствие!
Машинки на радиоуправлении
Радиоуправляемые гонки
Быстрые роботы следящие за линией — a1k0n.net
С февраля 2016 года участвую в
Встречи DIYRobocars здесь, в SF Bay Area,
где группа робототехников-любителей соревнуется в автономных гонках на время с
Радиоуправляемые автомобили. Я очень хорошо выступал на соревнованиях, по сути, имея всего лишь
Я очень хорошо выступал на соревнованиях, по сути, имея всего лишь
прославленного следящего за линией робота, но недавно модернизированного до полного SLAM-подобного
заход на посадку по намеченной траектории.
В этой серии постов я постараюсь обдумать все, что я узнал в
последние два года, и объяснить, как работает моя машина.
Это гонка между моей машиной и
@otaviogood’s
Carputer, который использует сквозной
поведенческое клонирование нейронной сети для привода. Приходилось уклоняться от многих других
машины на тренировке в тот день, поэтому мы думаем, что она как бы задыхается, когда моя машина
обрезает его. Моя машина совершенно не обращает внимания на другие машины; колесо к колесу
гонка здесь была просто для удовольствия.
На видео выше вы можете увидеть все, что может видеть/чувствовать автомобиль: с высоты птичьего полета.
вид земли, гироскоп, акселерометр и измерения скорости вращения колес.
Вот более свежее видео, показывающее текущее состояние той же машины с использованием
несколько иная, но все же принципиально линейная стратегия (вместо
следуя по линии на земле, он следует по предварительно оптимизированной гоночной линии):
Теория следования по линии
Представьте, что вы — робот, следующий по линии. Ваша миссия — двигаться вперед и
держите линию посередине своих датчиков (возможно, это ИК-датчики, смотрящие
на земле, возможно, это камера). Линия может идти прямо или поворачивать,
и вы тоже можете. Что касается вас, мир состоит только из вас и
линии, поэтому нам нужно подумать о вашем положении в пространстве относительно
линия.
Криволинейные координаты
Робот, следующий по линии, живет в криволинейной системе координат : все
измерения положения относятся к линии, которая имеет некоторое (вероятно,
переменная) кривизна. Поэтому вместо того, чтобы говорить, что у робота x , y
Поэтому вместо того, чтобы говорить, что у робота x , y
положение и, возможно, угол θ , я стараюсь следовать обозначениям, которые я видел
в литературе по робототехнике / автомобильному управлению.
Предположим, что автомобиль движется по окружности с кривизной κ ,
что эквивалентно 1/радиус r , за исключением того, что он может быть либо положительным, либо
отрицательный — в соглашении, которое я использую, если он положительный, круг изгибается к
левая и отрицательная кривизна идет вправо (если это кажется обратным, подумайте
о том, как углы условно идут против часовой стрелки на плоскости, как в ( x , y )
= (cos θ , sin θ )). 0 кривизна конечно означает идеально прямую
линия.
В точке на центральной линии трассы, ближайшей к положению автомобиля, передний
направление называется x и направление влево y . (Опять же, если
и кажутся обратными, это из-за правила правой руки, учитывая, что х идет
вперед. Почему x вперед? Не совсем уверен, просто они так склонны
Почему x вперед? Не совсем уверен, просто они так склонны
сделай это.)
Расстояние от автомобиля до ближайшей точки на осевой линии называется
y e , что положительно, если автомобиль находится с левой стороны
центр, минус справа. Курсовой угол автомобиля относительно
центральная линия обозначена Ψ e , которое увеличивается по мере поворота автомобиля
против часовой стрелки относительно центральной линии.
Стратегии управления
Самое очевидное, что нужно сделать, это игнорировать все, кроме y e – если
линия находится слева, затем поверните налево, а если она справа, поверните направо.
Это поможет вам начать, но оно будет бродить туда-сюда и не будет работать в
все когда набираешь скорость. Вот небольшая симуляция:
Чистый пропорциональный контроль
КП
против
управление: \(\каппа’ = -K_p y_e\)
Это первый
вещь, которую я пробовал, и это примерно то, что многие люди делают, делая
следящие за линией роботы. Но есть простая настройка, которая заставляет его работать намного
Но есть простая настройка, которая заставляет его работать намного
лучше, если вы сможете определить не только расстояние до осевой линии, но и
относительный угол линии Ψ e .
Чистое пропорционально-дифференциальное управление
Нам нужен способ погасить эти колебания, и классический способ сделать это
заключается в добавлении производного члена обратной связи. Мы могли бы либо численно дифференцировать
наш y e Ошибка последнего кадра, или мы могли бы использовать синус
угол между нашим курсом и нашей осевой линией, что в значительной степени эквивалентно
(за исключением того, что это не зависит от скорости).
КП
Кд
против
управление: \(\каппа’ = -K_p (y_e + K_d \sin \psi_e)\)
Намного лучше, не так ли? Только он склонен «удивляться», когда есть
поворот, и он всегда будет промахиваться. Если мы знаем кривизну пути, мы
далее мы можем просто добавить это к нашему управляющему сигналу.
Пропорционально-дифференциальное управление с учетом кривизны
КП
Кд
против
контроль: \(\каппа’ = -K_p (y_e + K_d \sin \psi_e) + \каппа\)
Еще лучше. Он все еще немного зашкаливает, но его можно заставить отслеживать очень
точно. Единственная реальная проблема с этим — кривизна дорожки.
на самом деле зависит от положения автомобиля и ; внутренняя часть поворота имеет более высокую
кривизна, чем снаружи.
Есть бумага от 192 \psi_e}{1 — \kappa y_e} + \sin \psi_e \left(\kappa \sin \psi_e — K_d \cos \psi_e \right) \right]\)
Если вы поиграетесь с константами, то увидите, что эта обходит
отслеживать быстрее, чем любой из вышеперечисленных.
Заданная скорость на кривой
Вышеизложенное дает нам контрольные показатели кривизны, но ничего не говорит о
как быстро мы должны двигаться в повороте. На самом деле вышеупомянутые симуляции
просто гоняют двигатель с постоянной скоростью, а симулятор недостаточно поворачивает
в поворотах (другими словами, передние колеса буксуют, фактически не поворачивает, как
сколько хочет, и тормозит машину).
В идеале тормозить на поворотах и не допускать в них недостаточной поворачиваемости. Но как быстро
мы должны идти?
Это может быть очень сложно из-за динамики шин и переноса веса, но
Самое простое, что работает, — это стрелять по заданному поперечному ускорению —
шины смогут оказывать определенное усилие в г вбок, и вы можете
измерьте это, ведя машину по кругу и наблюдая, что
говорит акселерометр (или произведение скорости движения вперед и скорости вращения гироскопа). 92 \psi_e}{1 — \kappa y_e} + \sin \psi_e \left(\kappa \sin \psi_e — K_d \cos \psi_e \right) \right]\]
\[v = \min\left(\sqrt{\left|\frac{a_L}{\kappa’}\right|}, v_{max}\right)\]
Теперь он ускоряется на прямых и замедляется на поворотах. Единственная проблема это
не имеет тормозов мгновенного действия, поэтому поворотам все же удивляет; я
добавлен еще один параметр, определяющий, насколько далеко он смотрит вперед, прежде чем определять
\(\каппа\) для вычисления его скорости — он будет смотреть вперед на трассе
и взять максимум его контрольной кривизны и кривизны на трассе
впереди, чтобы определить его ограничение скорости.
Будущая работа
На данный момент мы достигаем пределов того, что мы можем сделать с простым PD-типом.
контроль, и чтобы получить действительно хорошее отслеживание, нам нужно начать делать конечный горизонт
планирование, но это выходит за рамки того, что я хочу здесь осветить. Повторный
Линейно-квадратичные регуляторы / Дифференциальное динамическое программирование — это то, что я
будет использовать дальше, но мы не говорили даже о создании простых алгоритмов
практично еще!
Находка
у , Ψ , κ и все такое
В реальном роботе нам нужно использовать наши датчики для измерения линии
по отношению к нашей собственной позиции/ориентации. Это может быть так же просто, как некоторые
фототранзисторы, направленные в землю, или фронтальные (предпочтительно
широкоугольная) камера.
В любом случае, мы можем хотя бы косвенно измерить эти параметры. Чтобы отслеживать их
со временем и для уточнения наших оценок требуется фильтр Калмана.
А пока очень краткий обзор того, как это было сделано в первом видео выше:
- Калибровка камеры с помощью OpenCV
- Создайте справочную таблицу, отображающую пиксели нашей фронтальной камеры в
виртуальный вид с высоты птичьего полета - Настройте камеру на съемку видео в цветовом пространстве YUV (большинство камер могут это делать).
изначально) — YUV — это перцептивное цветовое пространство, которое позволяет очень легко
найти такие цвета, как желтый и оранжевый - Переназначьте каждое изображение и используйте сверточный фильтр для виртуального вида с высоты птичьего полета.
чтобы найти линии дорожек (примечание: не сверточная нейронная сеть или что-то в этом роде).
как это, просто функция, разработанная вручную, которая «активируется» на полосах движения и
относительно невосприимчив к изменениям освещения) - Используйте линейную регрессию, чтобы подогнать параболу к линиям
- Вычислите y e , Ψ e , κ из уравнения
парабола в точке наилучшего совпадения.
