Содержание
Регулятор обертів двигуна US-52 400 W, контролер швидкості обертання мотора потужністю до 400 Вт: купити за найкращою ціною від компанії [Компанія]
Регулятор обертів двигуна US-52 400 W, контролер швидкості обертання мотора потужністю до 400 Вт, регулятор частоти обертання електродвигуна зі зворотним зв’язком
US-52 400W — пристрій для плавного та точного регулювання обертів однофазного асинхронного електродвигуна змінного струму потужністю до 400 Вт з таходачиком. Ця модель регулятора здатна підтримувати задані оберти двигуна у разі збільшення навантаження (здійснюється зворотний зв’язок між платою US-52 і двигуном через таходатчик).
На задній панелі пристрою є контакти, за допомогою яких можна контролювати напрямок обертання двигуна («СОМ» замкнений на «CW» — двигун обертається за годинниковою стрілкою; «СОМ» замкнений на «CCW» — двигун обертається проти годинникової стрілки.)
Застосування: свердлильні, фрезерні та гравіювання станки, шліфувальні пристрої, системи вентиляції, швейне обладнання тощо.
Особливості:
Висока точність і плавність регулювання швидкості
Широкий діапазон керування швидкістю
Низький рівень споживання енергії
Невеликі розміри
Простота у використанні
Тривалий термін експлуатації
Технічні характеристики:
Модель: US-52 400W
Тип керування: ручне
Керування напрямком обертання двигуна: так
Напруга живлення: ~220 В
Частота змінного струму: 50 Гц
Потужність відповідного двигуна: до 400 Вт
Діапазон регулювання швидкості: 90~1400 об/хв
Швидкість реакції: 0.5 с
Роз’єм: однорядний конектор 6 pin
Довжина кабелю: ~0.6 м
Матеріал корпусу: АБС-пластик
Робоча температура довкілля: -10…+45 °C
Відносна вологість: ≤85% (без конденсату)
Вага нетто: 200 г
Гарантійний термін: 3 місяці
Габаритні розміри:
Схема під’єднання:
Увага! Розташування контактів і забарвлення дротів може змінюватися залежно від постачання. Під час під’єднання регулятора уважно ознайомтеся зі схемою зображеною на самому пристрої, тому що саме вона є найбільш реалістичною.
Під час під’єднання регулятора уважно ознайомтеся зі схемою зображеною на самому пристрої, тому що саме вона є найбільш реалістичною.
Інструкція щодо використання:
1. Вимкніть живлення, під’єднайте регулятор відповідно до електричної схеми
2. Встановіть регулятор на «0», щоб уникнути миттєвого високого струму (невиконання цієї рекомендації може призвести до зламання регулятора)
3. Увімкніть живлення і встановіть ручку швидкості на бажане положення
4. Якщо після під’єднання регулятора та двигуна крутний момент або швидкість не дотримані — відрегулюйте потенціометр.
5. Щоб змінити напрямок двигуна — поміняйте контакти «CW» и «CCW» на задній панелі.
Якщо «СОМ» замкнений на «CW» — двигун обертається за годинниковою стрілкою.
Якщо «СОМ» замкнений на «CWW» — двигун обертається проти годинникової стрілки.
Зміну напрямку руху необхідно виконувати після повної зупинки двигуна!
Увага!
Виробник залишає за собою право вносити зміни в конструкцію виробу, що не погіршують його якість, без попереднього повідомлення покупця. Інформація на сайті є актуальною на момент її публікації.
Інформація на сайті є актуальною на момент її публікації.
Зовнішній вигляд товару може відрізнятися від світлин на сайті. Розбіжність зовнішнього вигляду та комплектності реального товару зі світлинами на сайті не є показником неналежної якості виробу.
Комплект постачання
- Регулятор обертів двигуна US-52 400W
До цього регулятора у нас можна придбати
Асинхронний мотор-редуктор
Дивіться всі наші оголошення
- Каталог товаров
- Станки
- Оснастка для станков
- Системи охолодження та вентиляції
- Контролери
- Електродвигун
- Драйвери крокового двигуна
- Драйвери та крокові двигуни з енкодером
- Серводвигуни із серводрайверами
- Блоки живлення
- Шпинделі
- Інвертори
- Пульти ручного керування та DSP контролери
- Датчики, кнопки, роз’єми, кабелі, мікросхеми, фільтри
- Лінійні напрямні та підшипники
- Передачі
- Системи змащення напрямних і передач
- Механіка
- Гнучкі муфти
- Гнучкий кабель-канал (кабелеукладчик)
- Фрези
- Алюмінієвий профіль
- Пневматика
Трехфазный контроллер для асинхронного двигателя схема
Автор admin На чтение 11 мин Просмотров 4 Опубликовано Обновлено
Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г.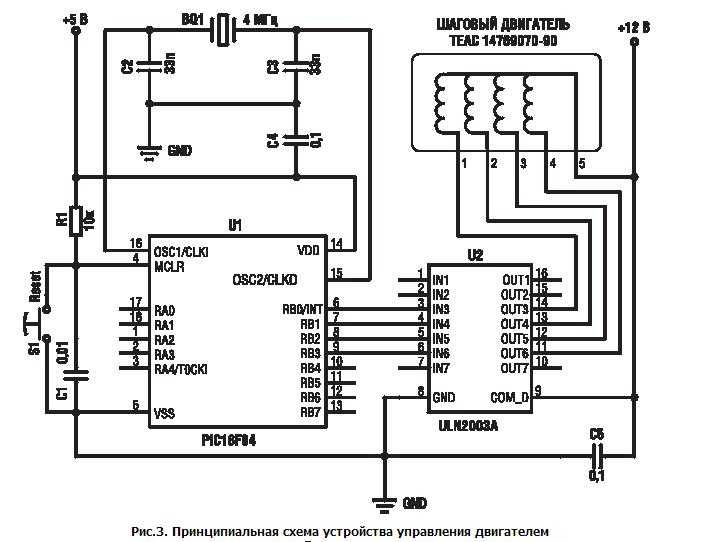 Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя 400Гц, а напряжение питания 27В. Кроме того, средняя точка двигателя (при соединении обмоток «звездой») выведена наружу, что позволило предельно упростить схему: понадобилось всего три выходных сигнала, а на каждую фазу потребовался всего один выходной ключ. Схема генератора показана на рисунке 1.
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
Рисунок 2. Временные диаграммы импульсов генератора.
На базе рассмотренного контроллера А. Дубровским из г. Новополоцка Витебской обл. была разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока напряжением 220В. Схема устройства была опубликована в журнале «Радио» 2001г. №4.
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.
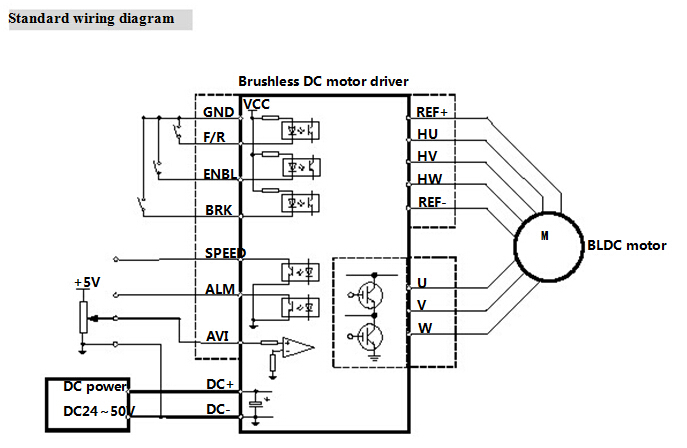
Подключение двигателя к выходу трехфазного инвертора
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхних и нижних ключей, а именно парами V1&V6, V3&V6, V5&V2 совершенно недопустимо: произойдет короткое замыкание. Поэтому, для нормальной работы такой ключевой схемы, обязательно, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры управления формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
Такую ситуацию называют сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя на диодном мосте VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3. 2 высокий уровень открыт транзистор верхнего ключа 1VT3.
2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
Конденсатор 1C2 обеспечивает задержку переключения ключей около 100 микросекунд, столько же дает оптрон 1U1, тем самым формируется вышеупомянутая «мертвая зона».
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках предлагалось это самое эффективное значение регулировать при помощи ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
В любительских условиях механический узел получался в изготовлении сложным, а главное ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» №12 2004. Схема этого устройства показана на рисунках 5 и 6.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант NE555). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
В той же журнальной статье автор предлагает вариант задающего генератора, который позволяет избавиться от использования автотрансформатора. Схема генератора показана на рисунке 7.
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных промышленных частотных преобразователях большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.
Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе мощные транзисторы структуры MOSFET или IGBT, специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Если вернуться к рисунку 6, то можно заметить, что схема имеет для каждой из трех фаз выходные сигналы, обозначенные как «Н» и «В». Наличие этих сигналов позволяет раздельно управлять верхними и нижними ключами. Такое разделение позволяет формировать паузу между переключением верхних и нижних ключей при помощи блока управления, а не самими ключами, как было показано в схеме на рисунке 3.
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних ключей DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому их питание осуществляется от этого источника. Микросхемы верхних ключей можно запитать так же, как было показано на рисунке 3 с использованием дополнительных выпрямителей и отдельных обмоток на трансформаторе. Но в данной схеме применяется иной, так называемый, «бустрепный» метод питания, смысл которого в следующем. Микросхема DA1 получает питание от электролитического конденсатора C1, заряд которого происходит по цепи: +12В, VD1, C1, открытый транзистор VT2 (через электроды сток – исток), «общий».
Другими словами заряд конденсатора C1 происходит в то время, когда открыт транзистор нижнего ключа. В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток – исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток – исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены лишь самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с которых все начиналось, и где можно даже по схеме рассмотреть все «изнутри». Более современные конструкции выполнены с применением микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме более просты, чем на микросхемах средней степени интеграции, имеют такие нужные функции, как плавный пуск двигателя, защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их принято называть «прошивок». Именно от этих программ и зависит насколько хорошо или плохо будет работать блок управления трехфазного инвертора.
Достаточно простые схемы контроллеров трехфазного инвертора опубликованы в журнале «Радио» 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи А. Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. В статье приведены две простых схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных переключателей, что вполне достаточно во многих практических случаях. Там же дается ссылка где можно скачать готовые «прошивки», и, более того, специальную программу, с помощью которой можно изменять параметры «прошивок» по своему усмотрению. Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.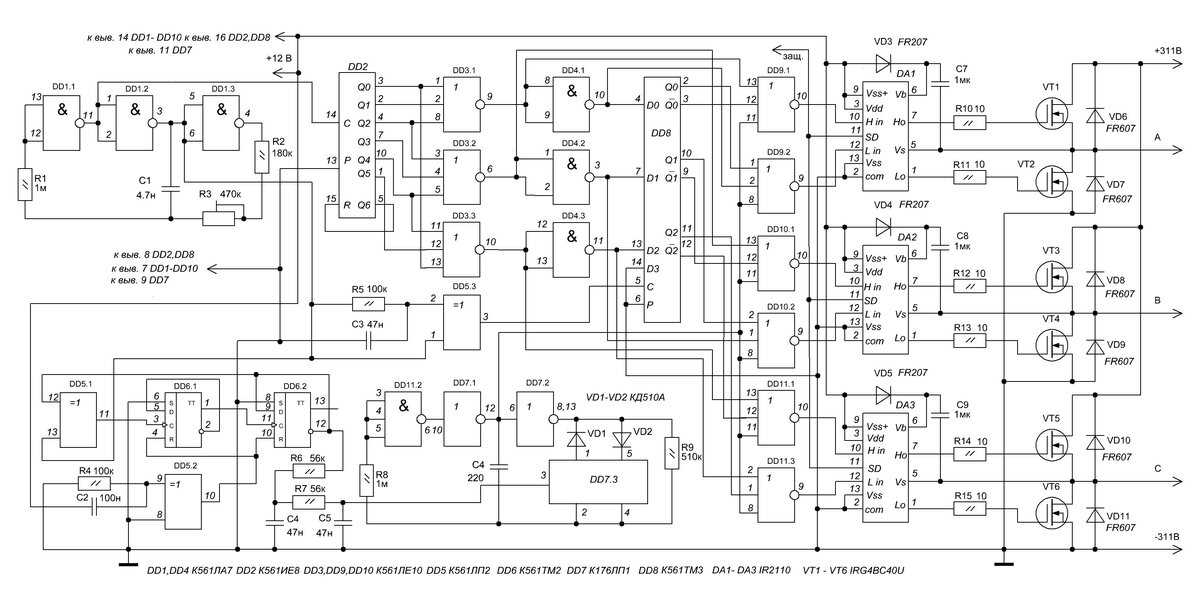
Источник
Контроллеры двигателей | Curtis Instruments
AC F2-A
Этот контроллер двигателя переменного тока использует два высокопроизводительных микропроцессора ARM Cortex в компактном корпусе для обеспечения непревзойденной производительности и очень гибкого набора функций.
Модель AC F2-A оптимизирована для использования в качестве контроллера тяги на гидравлических тележках класса III грузоподъемностью 1,0–2,0 тонны. Контроллер также подходит для управления тягой или гидравлическим насосом на других типах транспортных средств с аккумуляторным питанием. Разработчики транспортных средств могут определять и контролировать динамические характеристики трансмиссии транспортных средств. Модель AC F2-A также является мощным системным контроллером, который может работать в качестве управляющего устройства на шине CAN.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
12 В
24 В
36 В
48 В
Максимальный ток
240Arms
AC F2-C
Curtis Model AC F2-C представляет собой интегрированный контроллер системы тяги переменного и постоянного тока. Этот контроллер двигателя переменного тока F2-C (инвертор) в сочетании с полумостовым гидравлическим насосом постоянного тока и системой управления пропорциональным клапаном использует двойной высокий уровень 9.0007
Этот контроллер двигателя переменного тока F2-C (инвертор) в сочетании с полумостовым гидравлическим насосом постоянного тока и системой управления пропорциональным клапаном использует двойной высокий уровень 9.0007
производительность Микропроцессоры ARM Cortex в компактном корпусе обеспечивают непревзойденную производительность и очень гибкий набор функций.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Traction
Комбинированный насос переменного тока и насоса постоянного тока
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
280Arms-280A
AC F2-T/AC F2-D
Модель Curtis AC F2-T объединяет три отдельных контроллера двигателя в компактный прочный блок. AC F2-T обеспечивает независимое управление двумя асинхронными двигателями переменного тока или тяговыми двигателями PMAC, а также управление двигателем гидравлического насоса постоянного тока. Curtis Model AC F2-D предлагает версию только с двойной тягой без управления насосом постоянного тока.
Curtis Model AC F2-D предлагает версию только с двойной тягой без управления насосом постоянного тока.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный DC (BLDC)
Применение/Функция
Traction
Комбинированный насос переменного тока и насоса постоянного тока
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
240Arms+280A
AC F4-A
Контроллер двигателя Curtis модели AC F4-A обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
AC F4-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
500Arms
AC F6-A
Контроллер двигателя Curtis модели AC F6-A обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока, двигателей переменного тока и двигателей постоянного тока с постоянным током.
AC F6-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
12 В
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
450Армс-650Армс
HVi F5-R
Контроллер двигателя переменного тока Curtis модели HVi F5-R имеет диапазон рабочего напряжения 150–525 В, пиковую мощность 200 А и непрерывную мощность 100 А. Модель HVi F5-R обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
Модель HVi F5-R обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
HVi F5-R имеет архитектуру категории 2 функциональной безопасности. Контроллер предназначен для гибридных систем с электрической тягой, гидравлическим насосом и генератором на двигателе (OEG) в мобильном оборудовании, таком как погрузочно-разгрузочные машины, мобильные подъемные рабочие платформы, наземная поддержка аэропортов и строительная техника.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
200 В постоянного тока+
Максимальный ток
200A
1222
Модель Curtis 1222 представляет собой контроллер асинхронного двигателя переменного тока для систем рулевого управления с электроусилителем, управляемых по проводам. В этих системах двигатель рулевого управления функционирует как исполнительный механизм для изменения угла поворота управляемого колеса (колес) транспортного средства и, таким образом, изменения направления движения.
В этих системах двигатель рулевого управления функционирует как исполнительный механизм для изменения угла поворота управляемого колеса (колес) транспортного средства и, таким образом, изменения направления движения.
Тип двигателя
Индукция переменного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
70Arms
1232E
Модель Curtis 1232E обеспечивает расширенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса, и обеспечивает высочайший уровень функциональной безопасности.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
150Arms
1232SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
375Arms
1234E
Модель Curtis 1234E обеспечивает расширенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса, и обеспечивает высочайший уровень функциональной безопасности
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
250Arms
1234SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
500Arms
1236E
Модели Curtis 1236E и 1238E обеспечивают улучшенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода автомобиля или гидравлического насоса. Они предлагают разработчикам транспортных средств очень экономичное сочетание мощности, производительности и функциональности
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
350Arms
1236SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
650Arms
1238E
Модели Curtis 1236E и 1238E обеспечивают улучшенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода автомобиля или гидравлического насоса. Они предлагают разработчикам транспортных средств очень экономичное сочетание мощности, производительности и функциональности.
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
800Arms
1238SE
Контроллеры переменного тока Curtis ‘SE’ используют новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
1000Arms
1239E
Модель Curtis 1239E с изолированной логикой 12 В обеспечивает энергоэффективное управление асинхронными асинхронными двигателями переменного тока, выполняющими функции тягового привода на транспортном средстве. Он предлагает разработчикам транспортных средств экономически эффективное сочетание мощности, производительности и функциональности.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
72 В
80 В
84 В
96 В
108 В
120 В
144 В
Максимальный ток
650Arms
1266
Контроллеры Curtis Model 1266 A/R SepEx® являются программируемыми и микропроцессорными, с усовершенствованной силовой секцией MOSFET для плавного и плавного управления двигателями с независимым возбуждением.
Тип двигателя
SepEx®
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
350A
1268
Контроллеры Curtis PMC модели 1268 SepEx® являются программируемыми и микропроцессорными, с усовершенствованной силовой секцией MOSFET для плавного и плавного управления двигателями с независимым возбуждением.
Тип двигателя
SepEx®
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
500A
1212
Контроллер скорости двигателя Curtis модели 1212 обеспечивает точное и плавное управление приводными двигателями с постоянными магнитами для транспортных средств с аккумуляторным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
70A
1212BL
Контроллеры скорости двигателя Curtis модели 1212BL обеспечивают эффективное и оптимальное управление бесщеточными двигателями постоянного тока (BLDC) для транспортных средств с аккумуляторным питанием. Модель 1212BL оптимизирована для использования на малых/микротележках класса III и подметальных машинах для ухода за полами. Широкие возможности программирования позволяют использовать контроллеры модели 1212BL в любых маломощных двигателях BLDC.
Тип двигателя
Бесщеточный DC (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
70A
1212C
Контроллер скорости двигателя Curtis модели 1212C обеспечивает эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212E
Контроллеры двигателей Curtis модели 1212E обеспечивают эффективное и оптимальное управление двигателями с щеточными постоянными магнитами (PM) для транспортных средств с аккумуляторным питанием. Модель 1212E оптимизирована для использования на тележках с поддонами класса III малой грузоподъемности и машинах для ухода за полом, таких как подметальные машины и поломоечные машины.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212P
Контроллер скорости двигателя Curtis модели 1212P обеспечивает эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212S
Контроллеры скорости двигателя Curtis моделей 1212P и 1212S обеспечивают эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием. Оптимизирован для использования на малотоннажных гидравлических тележках класса III и аналогичных электрических промышленных транспортных средствах. Программируемость преобразователей 1212P&S позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
Максимальный ток
125A
1220
Curtis Model 1220 представляет собой контроллер щеточного электродвигателя постоянного тока с постоянными магнитами для электроусилителя рулевого управления, систем рулевого управления по проводам и работает только с контроллерами тяги переменного тока Curtis с поддержкой VCL. Двигатель рулевого управления работает как исполнительный механизм для изменения угла поворота колеса (колес), тем самым изменяя направление движения. Модель 1220 интерпретирует входную команду рулевого управления и обратную связь о положении колеса, приводя в действие двигатель рулевого управления, чтобы переместить колесо в желаемое положение.
Двигатель рулевого управления работает как исполнительный механизм для изменения угла поворота колеса (колес), тем самым изменяя направление движения. Модель 1220 интерпретирует входную команду рулевого управления и обратную связь о положении колеса, приводя в действие двигатель рулевого управления, чтобы переместить колесо в желаемое положение.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
50A
1220E
Модель Curtis 1220E представляет собой контроллер щеточного двигателя постоянного тока с постоянными магнитами для электроусилителя руля и систем рулевого управления по проводам. Этот контроллер разработан исключительно для контроллеров тяги переменного тока с поддержкой Curtis Vehicle Control Language (VCL). Двигатель рулевого управления работает как исполнительный механизм для изменения траектории движения путем изменения угла поворота колес.
Двигатель рулевого управления работает как исполнительный механизм для изменения траектории движения путем изменения угла поворота колес.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
70A
1229
Контроллер Curtis Model 1229 представляет собой контроллер для тяжелых условий эксплуатации, предназначенный для сложных тяговых приложений в неблагоприятных условиях. Он имеет степень защиты IP65 и использует передовую мощную двухмикропроцессорную логическую архитектуру, соответствующую стандарту EN ISO 13849.соответствия, а также имеет CANbus, 4 вспомогательных драйвера по 10 А и гибкую функцию сопоставления ввода-вывода.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
275А
1204М
Модели Curtis 1204M/1205M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24В
36 В
48 В
60 В
72 В
Максимальный ток
500A
1205M
Модели Curtis 1204M/1205M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
Максимальный ток
500A
1209M
Модели Curtis 1209M/1221M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции.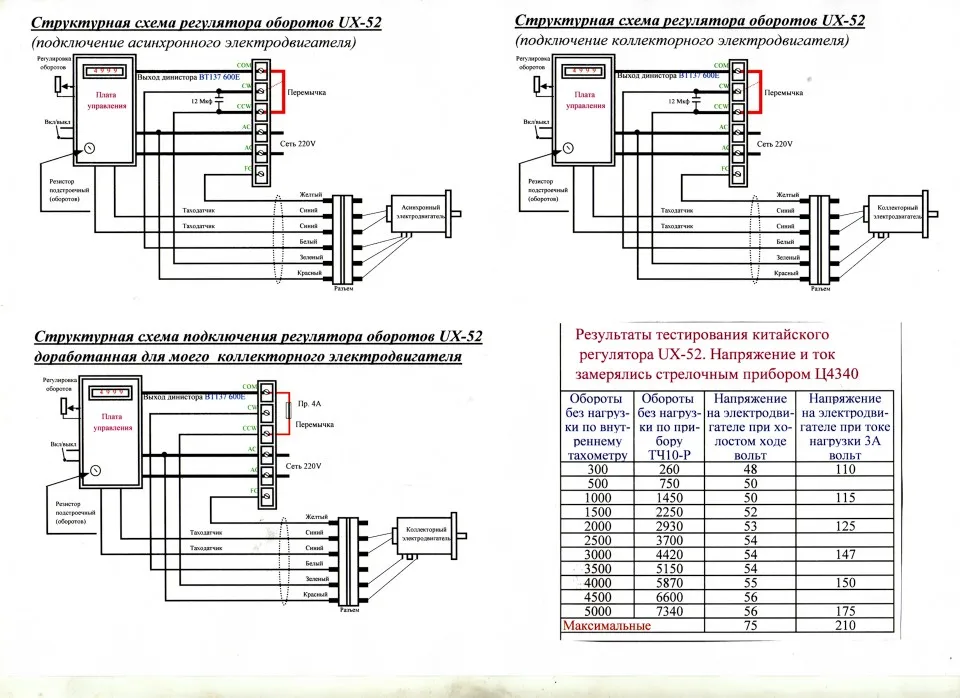 Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
60 В
72 В
Максимальный ток
450A
1216
Модель Curtis 1216 представляет собой высокорентабельный контроллер гидравлического насоса для использования с двигателями постоянного тока с последовательной обмоткой. Это обеспечивает исключительную ценность для автомобильных гидравлических насосов, таких как ножничные подъемники и другие типы мобильных подъемных рабочих платформ.
Тип двигателя
Серия
Применение/Функция
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
360A
1221M
Модели Curtis 1209M/1221M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
48 В
60 В
72 В
Максимальный ток
550A
1253
Модель 1253 представляет собой контроллер мощного гидравлического насоса, который обеспечивает как цифровой вход, так и аналоговый дроссель на основе управления двигателями постоянного тока с обмоткой. Он имеет микропроцессорную логику с программируемыми параметрами и предлагает максимальную гибкость при минимальных затратах.
Тип двигателя
Серия
Применение/Функция
Насос
Диапазон номинального напряжения (В постоянного тока)
48 В
80 В
Максимальный ток
600A
1226
Контроллеры скорости двигателя Curtis модели 1226 обеспечивают эффективное и оптимальное управление приводными двигателями с постоянными магнитами для транспортных средств с аккумуляторным питанием. Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом. Очень гибкая программируемость позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом. Очень гибкая программируемость позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
150A
1226BL
Контроллеры скорости двигателя Curtis модели 1226BL обеспечивают эффективное и оптимальное управление бесщеточными приводными двигателями постоянного тока для транспортных средств с аккумуляторным питанием. Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом. Очень гибкая программируемость позволяет применять их в любых маломощных двигателях BLDC.
Очень гибкая программируемость позволяет применять их в любых маломощных двигателях BLDC.
Тип двигателя
Бесщеточный DC (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
90-150Arms
CURTIS 1234-2371 Программируемый контроллер двигателя переменного тока, 24 В / 350 А
| 909:25 |
+
Контроллер двигателя постоянного тока и сборка | |
Контроллер двигателя постоянного тока SepEx и сборка | |
Контроллер двигателя с постоянным магнитом | |
Счетчик / манометр | Контроллер двигателя переменного тока |
Программатор | Контактор/соленоид |
Соединитель | Дроссель и румпель |
Двигатель | Преобразователь постоянного тока в постоянный и прочее |
| Блок управления двигателем серии Контроллер Сборка Блок управления двигателем SepEx Контроллер Сборка Контроллер двигателя с постоянными магнитами Контроллер двигателя переменного тока Программатор Контактор/Соленоид Счетчик / Манометр Дроссельная заслонка и румпель Двигатель Соединитель Преобразователь постоянного тока и прочее |
Бесплатная доставка по адресу: Америка: Канада, США, Мексика Африка: Южная Африка Азия: Камбоджа, Китай, Гонконг, Индонезия, Япония, Макао, Малайзия, Филиппины, Сингапур, Южная Корея, Тайвань, Таиланд, Вьетнам Европа: Австрия, Бельгия, Дания, Финляндия, Франция, Германия, Ирландия, Нидерланды, Норвегия, Швеция, Швейцария, Великобритания Океания: Австралия, Новая Зеландия Россия (недоступно для дальних регионов, задержка доставки может составлять 20-45 рабочих дней, в зависимости от пункта назначения, пожалуйста, свяжитесь с нами до совершения покупки) Для получения более подробной информации нажмите здесь. |
 ..
..| Программируемый контроллер двигателя переменного тока CURTIS Модель : 1234-2371 24 В / 350 А 909:25 | ||
Самая низкая цена за единицу 740,00 долларов США
| ||
Центральная часть для управления движением двигателя переменного тока транспортного средстваОбзор: Контроллеры асинхронных двигателей переменного тока CURTIS 1234 обеспечивают плавную работу Встроенный логический контроллер запускает полнофункциональный полевой контроллер переменного тока. VCL (язык управления транспортным средством) — это инновационное программное обеспечение для программирования. Связь по шине CAN, включенная в 1234, а также Контроллеры 1234 полностью программируются с помощью ручного программатора CURTIS модели 1313-4331 или станции программирования 1314 для ПК. Программатор обеспечивает возможности диагностики и тестирования в дополнение к гибкости конфигурации. Характеристики:
Предполагается, что контроллер переменного тока CURTIS необходимо запрограммировать перед применением к конкретному приложению. Покупателям, не имеющим опыта программирования контроллеров двигателей переменного тока, перед совершением покупки следует проконсультироваться с продавцом тележки/мотора и внимательно прочитать техническое описание контроллера двигателя переменного тока CURTIS 1234. Контроллеры двигателей переменного тока 1234 имеют очень сложный набор параметров. Типичное применение: MIMA, XILIN (RUYI), HANGCHA, HELI тягач/погрузчик. Как профессиональный поставщик, у нас есть OEM-программы (настройки контроллера) для некоторых грузовых автомобилей и вилочных погрузчиков. Покупатели могут связаться с нами и отправить нам информацию о транспортном средстве (вилочном погрузчике) (производитель, модель, год выпуска и т. д.), чтобы узнать, можем ли мы предоставить контроллер с его OEM-программой. Этот 1234-2371 также можно запрограммировать с помощью ручного программатора CURTIS CURTIS модели 1313-4331 или станции программирования ПК CURTIS 1314. Дополнительная плата за перепрограммирование контроллера не взимается. Основные характеристики :
Особенности также включают:
| ||
 Они обеспечивают беспрецедентное
Они обеспечивают беспрецедентное
 ): 500 В переменного тока
): 500 В переменного тока Если вам необходимо изменить какой-либо параметр контроллера, отправьте нам сообщение со списком параметров, которые необходимо изменить. Дополнительная плата за перепрограммирование контроллера не взимается.
Если вам необходимо изменить какой-либо параметр контроллера, отправьте нам сообщение со списком параметров, которые необходимо изменить. Дополнительная плата за перепрограммирование контроллера не взимается.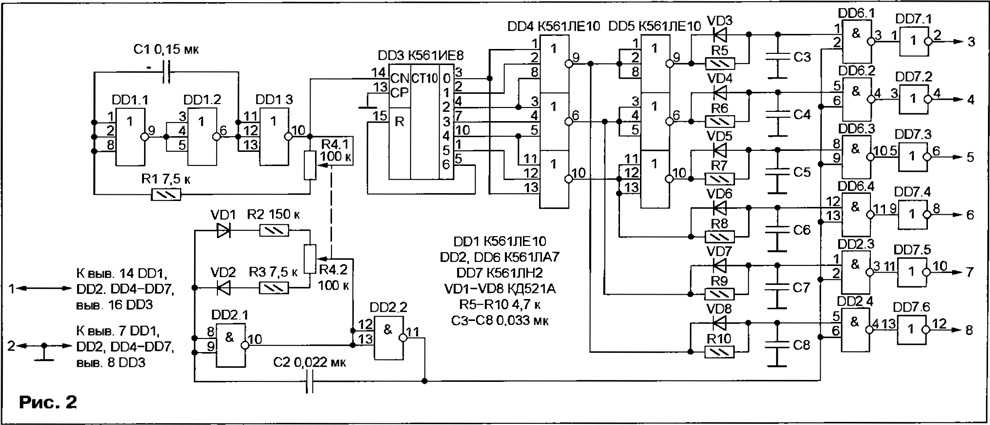 50 % тока двигателя при -25°C; полная отсечка при -40°C
50 % тока двигателя при -25°C; полная отсечка при -40°C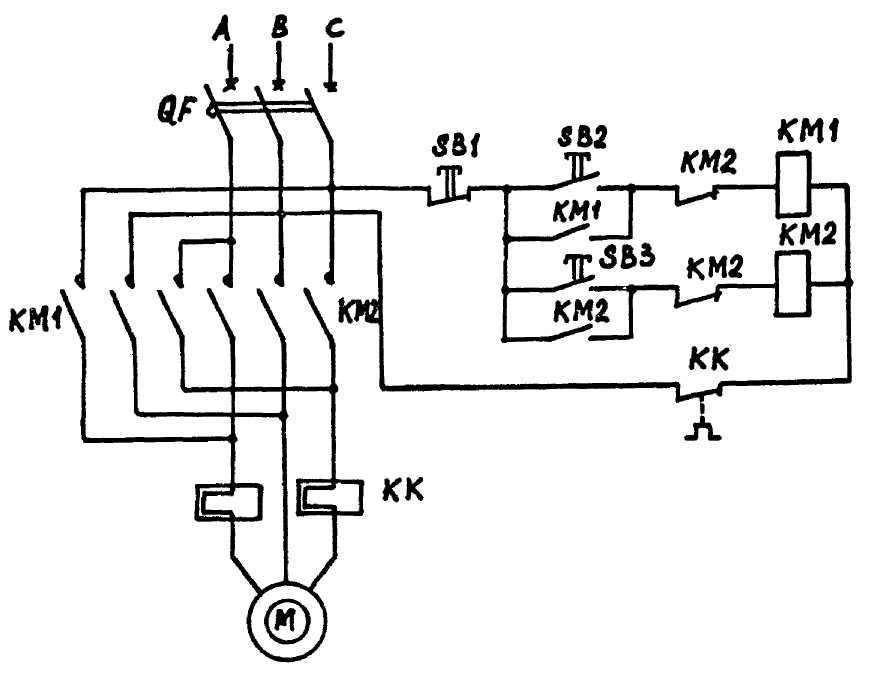


| Контроллер двигателя переменного тока CURTIS Модель : 1234-2371 24 В / 350 А |
Самая низкая цена за единицу 740,00 долларов США 1 / 4 2 / 4 3 / 4 4 / 4 Пожалуйста, свяжитесь с нами для получения реквизитов для оплаты: info@nocoev.
Бесплатная международная ускоренная доставка 12-месячная гарантия Спецификация (в формате PDF) |
Обзор: Контроллеры асинхронных двигателей переменного тока CURTIS 1234-2371 обеспечивают плавное Рассчитанный на 24 В / 350 А, CURTIS 1234-2371 является основной частью системы управления движением асинхронного двигателя переменного тока транспортного средства. Встроенный логический контроллер запускает полнофункциональный полевой контроллер переменного тока. VCL (язык управления транспортным средством) — это инновационное программное обеспечение для программирования. Связь по шине CAN, включенная в 1234, а также Контроллеры 1234 полностью программируются с помощью ручного программатора CURTIS модели 1313-4331 или станции программирования 1314 для ПК. Программатор обеспечивает возможности диагностики и тестирования в дополнение к гибкости конфигурации. Характеристики:
Предполагается, что контроллер переменного тока CURTIS необходимо запрограммировать перед применением к конкретному приложению. Контроллеры двигателей переменного тока 1234 имеют очень сложный набор параметров. Если вам необходимо изменить какой-либо параметр контроллера, отправьте нам сообщение со списком параметров, которые необходимо изменить. Дополнительная плата за перепрограммирование контроллера не взимается. Типичное применение: MIMA, XILIN (RUYI), HANGCHA, HELI тягач/погрузчик. Как профессиональный поставщик, у нас есть OEM-программы (настройки контроллера) для некоторых грузовых автомобилей и вилочных погрузчиков. Покупатели могут связаться с нами и отправить нам информацию о транспортном средстве (вилочном погрузчике) (производитель, модель, год выпуска и т. Основные характеристики :
Особенности также включают:
|
 com
com ОС также содержит логику для выполнения OEM-разработки.
ОС также содержит логику для выполнения OEM-разработки.
 Покупателям, не имеющим опыта программирования контроллеров двигателей переменного тока, перед совершением покупки следует проконсультироваться с продавцом тележки/мотора и внимательно прочитать техническое описание контроллера двигателя переменного тока CURTIS 1234.
Покупателям, не имеющим опыта программирования контроллеров двигателей переменного тока, перед совершением покупки следует проконсультироваться с продавцом тележки/мотора и внимательно прочитать техническое описание контроллера двигателя переменного тока CURTIS 1234. д.), чтобы узнать, можем ли мы предоставить контроллер с его OEM-программой. Этот 1234-2371 также можно запрограммировать с помощью ручного программатора CURTIS CURTIS модели 1313-4331 или станции программирования ПК CURTIS 1314. Дополнительная плата за перепрограммирование контроллера не взимается.
д.), чтобы узнать, можем ли мы предоставить контроллер с его OEM-программой. Этот 1234-2371 также можно запрограммировать с помощью ручного программатора CURTIS CURTIS модели 1313-4331 или станции программирования ПК CURTIS 1314. Дополнительная плата за перепрограммирование контроллера не взимается. д.
д.