Содержание
Транспортные устройства | Машиностроение
Автоматизация транспортно-загрузочных операций штучных заготовок является важной задачей автоматизированного производства.
В современных условиях механического, механосборочного цеха машиностроительного завода кроме загрузки и выгрузки решается комплексная задача автоматизации транспортных операций при загрузки:
- материалов;
- заготовок;
- режущего инструмента;
- приспособлений.
Кроме того, транспортные устройства используются при межоперационных перемещениях заготовок между станками.
Такое многообразие транспортных операций создало предпосылки к созданию комплексной транспортной системы, управляемой от единой ЭВМ.
В качестве транспортных средств применяют:
- автоматизированные тележки;
- штабелеры;
- конвейеры;
- кантователи;
- поворотные столы;
- роботы;
- конвейеры для удаления стружки и т.д.
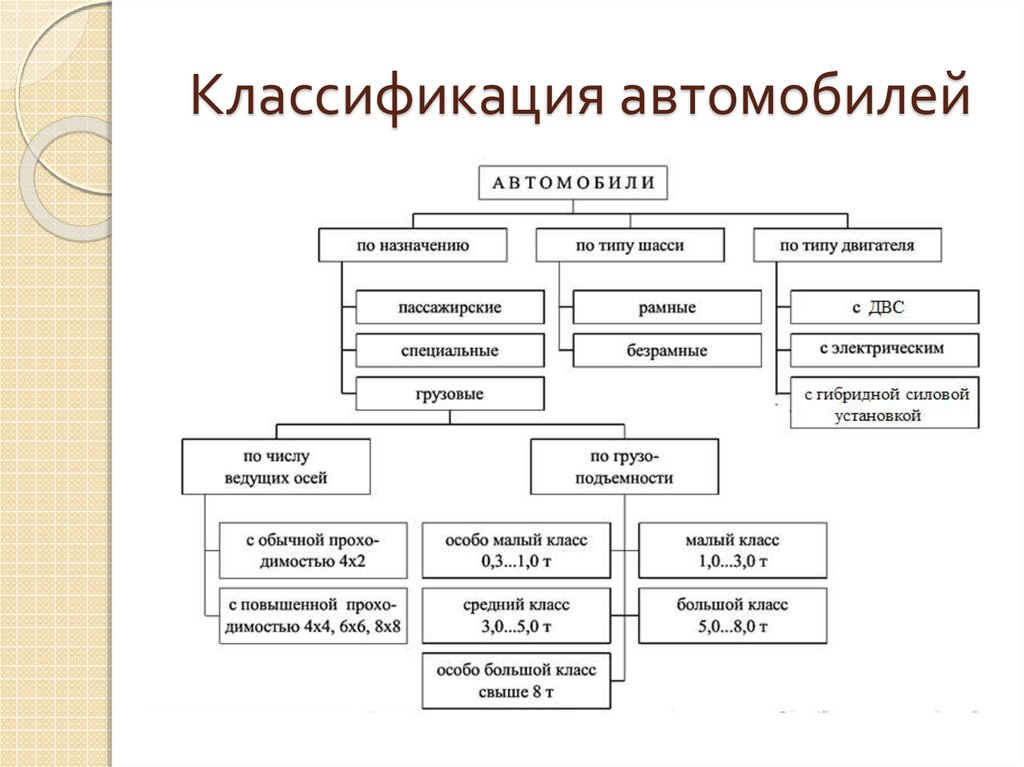
Автоматическая транспортная система (АТС)— совокупность взаимосвязанных самодействующих устройств межоперационного транспортирования заготовок и готовых изделий в автоматически действующей системе станков. Структура АТС представлена на (рис. 2.62).
Структура АТС представлена на (рис. 2.62).
рис. 2.62. Классификация транспортных систем
Загрузочно-разгрузочные устройства АЛ и ГПС должны обладать гибкостью, т.е. быстрой перекладкой на работу с другим видом заготовок.
В связи с многообразием форм заготовок для установки заготовок все большее применение находят приспособления-спутники (ПС) (рис. 2.63) с устройством для автоматической их смены (рис. 2.64).
Приспособление-спутник (ПС) 11 (см. рис. 2.64) устанавливают на платформу 7 (вместимостью 2 ПС), на которой смонтированы гидроцилиндры 10 и 13, штоки которых имеют Т-образные захваты 14 и 6. При установке на платформу (перемещение по стрелке Б) ПС своим фигурным вырезом 12 входит в зацепление с захватом 14 штока. На платформе ПС базируется на роликах 9 и центрируется (по боковым сторонам) роликами 8 (исходное положение ПС в позиции ожидания). Перемещение штока гидроцилиндра 10 обусловливает качение (по роликам) ПС.
рис. 2.63. Приспособление-спутник
рис. 2.64. Устройство для автоматической смены ПС
2.64. Устройство для автоматической смены ПС
При выдвижении штока гидроцилиндра 13 захват б перемещается (по направляющей штанге) и катит ПС по роликам 9 и 10 (в направлении стрелки Л) на поворотный стол станка, где ПС автоматически опускается на фиксаторы. В результате захват 6 выйдет из зацепления с ПС и стол станка (с закрепленным на нем ПС) на быстром ходу переместится в зону обработки.
Заготовку закрепляют на ПС во время обработки предыдущей заготовки (когда ПС находится в позиции ожидания) или заранее вне станка.
После того, как заготовка будет обработана, стол станка автоматически (на быстром ходу) передвигается вправо к устройству для смены ПС и останавливается в положении, когда фигурный паз ПС окажется под захватом 6. Гидроцилиндр поворотного стола расфиксирует ПС, после чего ПС войдет в зацепление с захватом 6. Затем масло поступает в штоковую полость гидроцилиндра 13, шток смещается в крайнее правое положение и перемещает ПС с заготовкой на платформу 7, где уже находится ПС с новой заготовкой. Чтобы поменять ПС местами, платформа поворачивается на 180° (на стойке 15) зубчатым колесом 3, сопряженным с рейкой 4, приводимой в движение гидроцилиндрами 5 и 16.
Чтобы поменять ПС местами, платформа поворачивается на 180° (на стойке 15) зубчатым колесом 3, сопряженным с рейкой 4, приводимой в движение гидроцилиндрами 5 и 16.
Платформу 7 точно выверяют относительно поворотного стола станка с помощью регулировочных болтов 2 и 17, ввернутых в выступы базовой плиты 7, неподвижно закрепленной на фундаменте.
На рис. 2.65 показаны наиболее широко применяемые схемы загрузочных устройств. В поворотном загрузочном устройстве (рис. 2.65, а) для смены столов-спутников 3 стол 2 станка 1 перемещается по одной или двум координатам в позицию смены заготовок, в которой он стыкуется с загрузчиком 4, после чего на свободную платформу загрузчика со станка перемещается спутник с обработанной деталью. Затем загрузчик 4 поворачивается на 180° и с другой его платформы на станок перемещается спутник с новой заготовкой.
Загрузочные устройства с раздельными платформами 4, расположенными с двух противоположных сторон от стола станка (рис. 2.65, б) обычно применяются в достаточно крупных ГПМ с шириной столов-спутников не менее 1000 мм.
Широко распространено загрузочное устройство с платформами 4 расположенными с одной стороны стола и установленными на подвижном или неподвижном основании (рис. 2.65, в). Загрузочные устройства оснащаются механизмами перемещения (гидроцилиндрами, винтовыми или цепными передачами) столов-спутников.
На ГПМ для обработки деталей типа тел вращения в качестве загрузочного устройства используются промышленные роботы, которые одним захватом могут переносить заготовки различного диаметра.
Система автоматической смены столов-спутников ГПМ состоит из двух частей: загрузочного устройства и накопителя столов-спутников.
рис. 2.65. Схемы компановок загрузочных устройств
Транспортные устройства (ТУ) — бывают стационарные и подвижные.
Стационарные — конвейеры, подъемники, которые установлены неподвижно на полу.
Подвижные — тележки (электрокары, самоходные тележки, работающие по автоматическому циклу, робокары и т.д.). По способу транспортирования ТУ делятся на непрерывного и прерывистого действия.
Непрерывные ТУ выполняются ленточными, цепными и роликовыми, вибрационные, лотковые самотечные. Такие ТУ применяют для легких заготовок.
Прерывистые ТУ (шаговые) бывают 2-х типов: с убирающимися упорами (собачками) и с поворачивающимися захватными устройствами.
В ГПС при большой серийности используют конвейерные ТУ, а при малой серийности — автоматические тележки (рис. 2.66): рельсовые — для деталей больших размеров и безрельсовые, управляемые от ЭВМ перемещающиеся по заданному маршруту (по магнито — электропроводу и т. д.).
рис. 2.66. Автоматическая сменная тележка
Тележка состоит из основания 1 с ромбовидным размещением колес 6, 9, что повышает маневренность тележки и упрощает устройство разворота. С торцов основания смонтированы подвижные бамперы 5 для автоматического торможения и остановки в случае возникновения препятствия. В основании расположены приводы на колеса 9, состоящие из редукторов 8, электродвигателей 7 с питанием от аккумуляторных батарей. На основании монтируется грузовая платформа 2 для транспортирования и загрузки-выгрузки столов-спутников 3 с заготовками 4.
Трассу следования автоматических тележек выбирают, исходя из условий производства. Одни тележки способны обслуживать оборудование только в пределах заранее проложенной трассы, а другие могут съезжать с пути, чтобы объехать препятствие или изменить технологический маршрут.
Системы маршрутослежения транспортных тележек, используемых в промышленности, представлены на рис. 2.67.
рис. 2.67. Классификация маршрутослежения транспортных тележек
рис. 2.68. Классификация транспортных автоматических тележек
рис. 2.69. Классификация транспортных роботов
рис. 2.70. Типовые конструкции промышленных роботов
Каждая система имеет свои преимущества и недостатки. Механическая система надежна и имеет простое устройство (рельсы, швеллер), но при этом трудно изменить конфигурацию трассы. Индуктивная система имеет достаточную надежность для работы как внутри, так и вне помещения. Траектория тележки задается кабелями, проложенными в полу цеха в канавке глубиной 20 мм и шириной 8 мм, которая затем заливается эпоксидной смолой. Кабель образует замкнутый контур, по которому пропускается ток частотой 5…32 кГц. При этом создаваемое магнитное поле взаимодействует с двумя приемными катушками индуктивности, смонтированных на тележке.
Кабель образует замкнутый контур, по которому пропускается ток частотой 5…32 кГц. При этом создаваемое магнитное поле взаимодействует с двумя приемными катушками индуктивности, смонтированных на тележке.
По рассогласованию напряженности поля в катушках вырабатывается сигнал, определяющий траекторию движения тележки. Основным недостатком индуктивной системы является чувствительность к электромагнитным помехам.
Радиоуправляемая тележка обладает более высокой оперативностью, но возможны помехи и ограничения на использование разных частотных диапазонов.
Фотоэлектрическая и оптоэлектронная система маршрутослежения позволяет обеспечить большую точность позиционирования, но надежность во многом зависит от качества трассы: границы белой полосы и черного фона должны быть четкими, а поверхность матовой. Оптические излучатели (лампы, лазерные маяки), а также приемники (фотодатчики и фотосопротивления), используемые в оптических датчиках, предъявляют высокие требования к чистоте оптики и среды, через которую передаются световые лучи. Все эти требования трудно соблюсти в условиях производства.
Все эти требования трудно соблюсти в условиях производства.
Наибольшее распространение получила индуктивная система маршрутослежения по электромагнитному кабелю.
Тележки могут быть использованы с различным исполнением грузовых платформ.
На рис. 2.68. приведена классификация тележек с различным использованием грузовых платформ, которые совершают различные движения для обеспечения грузозахвата.
Трассу следования автоматических тележек выбирают, исходя из условий производства. Одни тележки способны обслуживать оборудование только в пределах заранее проложенной трассы, а другие могут съезжать с пути, чтобы объехать препятствие или изменить технологический маршрут.
Всем требованиям ГПМ отвечает промышленный робот (ПР), выполняющий функции ТУ.
Промышленный робот — автоматическая, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней свободы (подвижности), и перепрограммируемого устройства управления для выполнения технологических и вспомогательных операций. В зависимости от выполняемых функций транспортные ПР подразделяются (рис. 2.69) и имеют типовые конструкции (рис. 2.70).
В зависимости от выполняемых функций транспортные ПР подразделяются (рис. 2.69) и имеют типовые конструкции (рис. 2.70).
14.2. Классификация транспортных средств и систем транспортирования грузов
Для рационального
проектирования систем транспортировки
и эффективного использования транспортных
средств транспортные средства
классифицируют по разным признакам:
По
сферам обслуживания заводской
транспорт подразделяют на внешний,
межцеховой и внутрицеховой.
Внешний
осуществляет связь предприятия с
железнодорожной станцией, с поставщиками,
потребителями и т.д.
Межцеховой
выполняет перевозки грузов между цехами
и службами.
Внутрицеховой
обеспечивает транспортирование грузов
внутри цеха. Он в свою очередь подразделяется
на общецеховой и межоперационный.
Общецеховой перемещает грузы между
производственными участками и кладовыми
цеха, межоперационный – между рабочими
местами по ходу технологического
процесса.
По
принципу действия подразделяют
на прерывный
(автомобили,
мостовые краны, подъемники и т.д.) и
непрерывный
(конвейеры, транспортеры всех видов).
По
видам: рельсовый,
безрельсовый, механический, водный,
воздушный, трубопроводный.
Рельсовый
в свою очередь подразделяют на напольный
(железнодорожный) и подвесной.
Безрельсовый
включает автомобили, тягачи, автокары,
электрокары, тележки и т.д.
Механический
– это
грузоподъемные механизмы (краны,
подъемники), конвейерные устройства
(ленточные, пластинчатые, скребковые и
т.д.)
Водный
– это толкачи,
баржи.
Воздушный
– вертолеты.
Основными видами
внешнего транспорта являются
железнодорожный, безрельсовый (автомобили,
тракторы), водный, трубопроводный.
В межцеховом
транспорте широко используют безрельсовый
и рельсовый подвесной, на металлургических
и других предприятиях также железнодорожный.
Общецеховым
транспортом является безрельсовый
(электрокары, автокары, тележки), рельсовый
подвесной, механический (мостовые,
настенные, консольные краны, подъемники,
лифты, конвейеры).
Межоперационная
транспортировка организуется с помощью
гравитационных устройств – желобов,
склизов, скатов, рольгангов, транспортеров
и т.д.
Главными требованиями
к использованию транспортных средств
являются: кратчайшие транспортные
маршруты; минимум перевалок грузов;
использование транспортных средств
строго в соответствие с их назначением
и техническими данными; строгое соблюдение
технических правил их эксплуатации.
Основными системами
транспортирования грузов
являются маятниковая, веерная, кольцевая.
Маятниковая
система
маршрутов устанавливает связь между
двумя пунктами. При этом возможны 2
варианта: возвращение транспортного
средства без груза (вариант одностороннего
маятника) и возвращение транспорта с
грузом (вариант двустороннего маятника).
Пример односторонней
маятниковой системы: литейный цех
механический цех.
Пример двухсторонней
маятниковой системы: механический цех
термический цех.
Веерная
система
используется тогда, когда один какой-либо
пункт связан односторонними перевозками
с несколькими другими пунктами:
Кольцевая
система
применяется
при последовательной транспортировке
грузов от пункта к пункту по замкнутому
маршруту, это обеспечивает более высокий
экономический эффект в сравнении с
маятниковой и веерной системой.
Валидация транспортировки медицинского оборудования
— I3CGLOBAL
Валидация транспортировки медицинских устройств
выполняется для проверки пригодности упаковки, совместимости и безопасности. Транспортировка и хранение не должны влиять на свойства медицинского изделия, т.е. изделие должно быть без повреждений, сохранять стерильность, не иметь физических повреждений, биологического загрязнения и функционировать по назначению.
В ходе транспортного валидационного испытания упаковка медицинского изделия подвергается нескольким смоделированным условиям окружающей среды, чтобы проверить, выдерживает ли изделие без ущерба для своих свойств.
СВЯЖИТЕСЬ С НАМИ
Требования MDR:
MDR, приложение I, общие требования к безопасности и рабочим характеристикам (GSPR), определяет требования к транспортировке и хранению медицинских устройств. Требования можно резюмировать следующим образом;
- ~ Устройство должно быть упаковано таким образом, чтобы его характеристики и рабочие характеристики при использовании по назначению не ухудшались при транспортировке и хранении.
- ~ Устройство должно быть упаковано таким образом, чтобы свести к минимуму риск, связанный с загрязняющими веществами и остатками для пациентов.
- ~ Изделия, имеющие определенное микробное состояние, должны быть упакованы, чтобы гарантировать, что они останутся в этом состоянии при размещении на рынке и останутся таковыми в условиях транспортировки и хранения
- ~ Упаковка должна сохранять стерильность до тех пор, пока упаковка не будет разорвана.


В обязательном порядке проводится транспортная валидация устройств, которые должны быть стерильными при размещении на рынке.
Валидационные испытания при транспортировке также могут проводиться сторонними лабораториями в моделируемых условиях окружающей среды. Некоторые транспортные тесты, перечисленные в стандарте ASTM D4169.(признанные FDA) приведены ниже.
- ~ Испытание на падение
- ~ Испытание на вибрацию
- ~ Испытание на сжатие/ штабелирование транспортных средств
- ~ Высотный тест
- ~ Испытание на климатические условия
- ~ Испытания на горизонтальный удар
Соответствующие тесты выбираются в зависимости от размера партии, вида транспорта, маршрутов доставки, условий окружающей среды и приемлемого запаса прочности.
Поскольку не существует конкретного стандарта, которому необходимо следовать для валидации при транспортировке, производитель должен выбрать все испытания, которые он должен выполнить для своего устройства, чтобы продемонстрировать безопасную и эффективную транспортировку.
Если вы можете продемонстрировать, что ваше устройство в порядке с пузырчатой пленкой, то это тоже нормально. Это означает, что как продемонстрировать безопасность, зависит только от вас, некоторые из решений, которые я могу предложить, приведены ниже.
- ~ Выполните подходящее испытание в зависимости от оценки риска, например, испытание на падение, испытание на вибрацию и т. д., чтобы продемонстрировать, что характеристики и производительность устройства не ухудшаются во время транспортировки и хранения.
- ~ Рассмотреть упаковочные решения, адаптированные для аналогичного/эквивалентного устройства при транспортировке на рынке.
- ~ Упакуйте устройство и отправьте его стандартными курьерами в самые ненадежные места и получите обратно.
- ~ Соответствующие условия хранения определяются исследованиями стабильности устройства.
Ниже перечислены некоторые общие стандарты и методы испытаний. Д5276
 График (F) Вибрация при свободной нагрузке – ASTM D999
График (F) Вибрация при свободной нагрузке – ASTM D999ASTM D4169-05 DC 13 «Авиа и автомобильные перевозки, местные, одиночная упаковка до 150 фунтов»
Этот стандарт зависит от того, какой тип пакета вы пытаетесь оценить.
- ~ Малый фасованный продукт в мешках для транспортировки (TS-1)
- ~ Большая плоская упаковка (TS-2)
- ~ Длинная узкая упаковка (TS-3)
- ~ Все другие упакованные продукты (TS-4) (наиболее типичный)
Стандарты ASTM:
- ~ D951- Метод испытания на водонепроницаемость транспортных контейнеров методом распыления
- ~ D996- Терминология упаковки и среды распространения
- ~ D4332- Практика подготовки контейнеров, упаковок или компонентов упаковки для тестирования
- ~ D5265- Метод испытания моста на удар
- ~ D5487- Метод испытания имитации падения груженых контейнеров ударными машинами
- ~ D6179- Методы испытаний на грубое обращение со сборными грузами и большими транспортировочными ящиками и ящиками
- ~ D6344- Метод испытаний на сосредоточенные удары по транспортным упаковкам
- ~ D6653- Методы испытаний для определения влияния большой высоты на упаковочные системы вакуумным методом
Опубликовать по категориям
Опубликовать по категориямВыбрать категориюИспытания на биосовместимость (5)Клиническая оценка (12)Основной файл препарата (1)FDA (1)FDA 510k (25)Регистрация FDA (11)ISO 13485 (4)ISO 14971 (3)ISO 62304 (1)MDCAS (1)MDR CE MARKING (31)Медицинское устройство (6)PMCF (1)Послепродажный надзор (2)PSUR (1)Ресурсы (8)UKCA (1)Без категории (6)
Классификация транспортных режимов — на устройстве и почти в реальном времени
От облака к почти реальному времени На устройстве
В Sentiance мы превращаем движение в информацию, поэтому обнаружение транспортных режимов является одной из наших основных технологий. Мы использовали и были довольны нашим решением на основе глубокого обучения, развернутым в облаке, в течение длительного времени (см. — Классификация крупномасштабных транспортных режимов на основе данных мобильных датчиков). Тем не менее, наконец, технология позволяет нам перейти к более безопасному для конфиденциальности и ресурсоэффективному решению, которое может работать на устройстве.
Мы использовали и были довольны нашим решением на основе глубокого обучения, развернутым в облаке, в течение длительного времени (см. — Классификация крупномасштабных транспортных режимов на основе данных мобильных датчиков). Тем не менее, наконец, технология позволяет нам перейти к более безопасному для конфиденциальности и ресурсоэффективному решению, которое может работать на устройстве.
И Android, и iOS предлагают базовое обнаружение активности на устройстве в режиме реального времени для транспортных режимов (например, движение). Однако это не то, что мы на самом деле подразумеваем, говоря «Транспортный классификатор». Вместо того, чтобы всегда переворачивать мгновенные прогнозы, мы стремимся сегментировать поездку на мультимодальные блоки, чтобы понять, когда вы идете, бегаете, ведете машину, едете на велосипеде и т. д.
Рис. разные цвета обозначают разные режимы)
мы хотим разбить поездку на стабильные виды транспорта (внизу).
Такая классификация видов транспорта более ценна, если мы хотим понять, являетесь ли вы экологическим пассажиром пригородной зоны, пользователем общественного транспорта или несгибаемым водителем.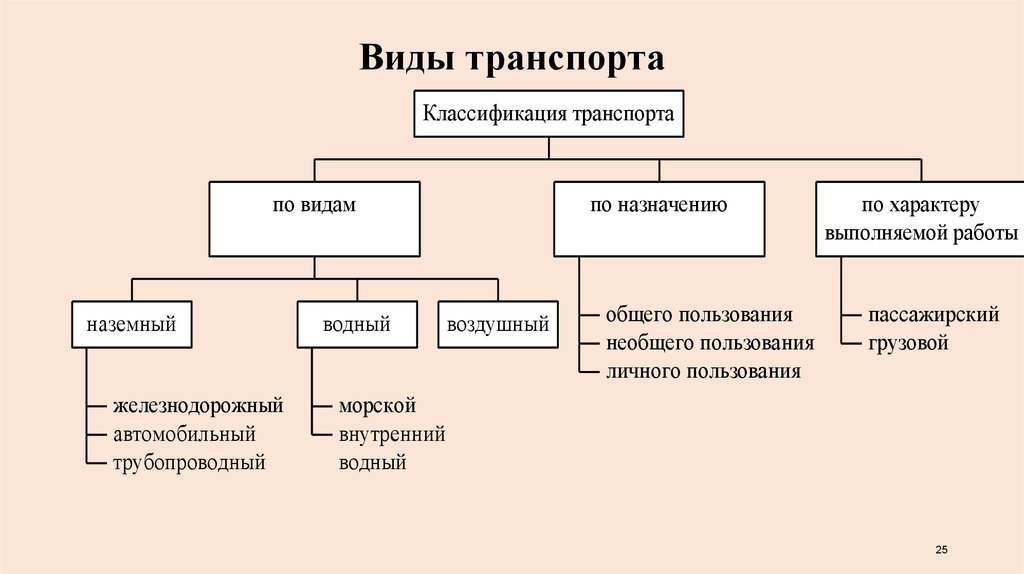 В дополнение к этому, прогнозы почти в реальном времени позволили бы нам проводить гиперперсонализированные кампании и знать, когда нацелить человека?
В дополнение к этому, прогнозы почти в реальном времени позволили бы нам проводить гиперперсонализированные кампании и знать, когда нацелить человека?
В этом сообщении блога мы поделимся методологией, которую мы использовали для создания транспортной классификации почти в реальном времени, которая работает на устройстве и обеспечивает стабильную сегментацию транспортных режимов. По сравнению с нашим текущим производственным транспортным классификатором в облаке нам удалось создать комплексное решение, которое соответствует TensorFlow Lite (tflite) , который полностью заменяет сложный блок бизнес-логики нейронной сетью.
Строительные блоки классификатора транспортных режимов
В качестве входных данных мы хотим передать необработанные данные датчиков (акселерометр, данные GPS, функции ГИС и т. д.), а в качестве выходных данных получить текущий вид транспорта. Мы хотим, чтобы вся обработка сигналов, прогнозирование и сегментация выполнялись на устройстве с максимально коротким временем отклика. Наверняка есть какие-то сложности:
Наверняка есть какие-то сложности:
- в данных датчика могут быть пробелы, и частота дискретизации может меняться со временем
- каждая мультимодальная поездка имеет разный размер и диапазон огромен (от минут до часов)
- Транспортному классификатору необходимо игнорировать некоторые события, такие как обработка телефона и бездействие
- решение должно оставаться небольшим и оказывать минимальное влияние на срок службы батареи телефона и ЦП
- мы стремимся к классификации в реальном времени, но в то же время невозможно быть уверенным, когда начнется новый вид транспорта, не дожидаясь хотя бы немного (как вы скоро увидите, что бит будет около 3 минут)
Для решения этих проблем мы будем использовать двухэтапный подход, сочетающий начальную архитектуру с U-net (см. рис. 2 ): позаботьтесь о различных частотах дискретизации и промежутках (перейти к разделу).
 На этом этапе данные датчика за 18 секунд преобразуются в вектор размером 8,9.0014
На этом этапе данные датчика за 18 секунд преобразуются в вектор размером 8,9.0014В следующих разделах мы объясним наш выбор дизайна и обсудим некоторые детали реализации.
Рис. 2. Архитектура транспортного классификатора, сочетающая модели времени начала и времени U-времени.
Шаг 1. Приблизительная интерполяция
Для начала мы знаем, что частота дискретизации датчика может меняться, и мы хотим применить некоторую обработку сигнала (по крайней мере, фильтр нижних частот). После некоторых исследований мы наткнулись на изящную идею Б. Льянаса ( Конструктивная приблизительная интерполяция с помощью нейронных сетей, 2006, дои ), которая, по сути, говорит о том, что есть способ сделать приблизительную интерполяцию и сглаживание с использованием различий (и сумм) значений в моменты времени t.
Льянаса ( Конструктивная приблизительная интерполяция с помощью нейронных сетей, 2006, дои ), которая, по сути, говорит о том, что есть способ сделать приблизительную интерполяцию и сглаживание с использованием различий (и сумм) значений в моменты времени t.
Позвольте быть любым разделением интервала . Давайте определим нейронную сеть как:
(1)
.
Для проблемы интерполяции эта сеть дает приблизительную интерполяцию, а параметры контролируют гладкость (более низкое значение приведет к более плавной подгонке).
Это можно интерпретировать довольно интуитивно, если подумать о том, что произойдет, если A огромно, и в этом случае оно приближает точку с помощью ступенчатой функции. Мало того, управление значением A позволяет добиться эффекта, аналогичного использованию фильтра нижних частот.
Рисунок 3. Приблизительная интерполяция с использованием ai-net, отображающая влияние параметра гладкости.
В нашем случае данные акселерометра при любой частоте дискретизации будут поступать в модель tflite , где они будут преобразованы в равномерно дискретизированные (до 10 Гц) и слегка сглаженные значения. Получается, что для задачи транспортной классификации наличие более высокой частоты дискретизации, чем 10 Гц, не приводит к выигрышу в точности. Мы эмпирически показали, что он может заменить нормализатор, который обычно состоит из интерполятора, фильтра нижних частот и передискретизатора. Это действительно аккуратное использование простого diff, активация relu и умножение матриц.
Шаг 2. Внедрение
Теперь, когда мы очистили и передискретизировали сигнал акселерометра, мы хотим создать вложение, которое захватывает важные функции для классификации транспорта и не чувствительно к поворотам телефона.
Для этого мы будем использовать обучающие данные, полученные путем внутренней маркировки тысяч поездок. При реализации инициативы по маркировке мы сосредоточились на двух уровнях детализации, которые мы назвали уровнем датчика и уровнем отключения. Например, на уровне датчиков имеет смысл иметь простои и телефонные обработки, но их следует игнорировать на следующем этапе, когда мы перейдем к окончательной классификации транспортных режимов.
Например, на уровне датчиков имеет смысл иметь простои и телефонные обработки, но их следует игнорировать на следующем этапе, когда мы перейдем к окончательной классификации транспортных режимов.
Рис. 4. Разница в определениях меток «низкий уровень/датчик» (вверху) и «высокий уровень/отключение» (внизу).
Для модели на уровне датчика мы передаем 18-секундные окна датчика, передискретизированные до 10 Гц с использованием приблизительной интерполяции. Мы обучили классификатор на основе архитектуры InceptionTime ( InceptionTime: Finding AlexNet for Time Series Classification , 2019, Hassan Ismail Fawaz, Benjamin Lucas, et. al., arxiv), чтобы различать различные транспортные режимы, простои и события обработки телефона.
Архитектура Inception представляет собой разумное усовершенствование стандартной сверточной нейронной сети. В то время как последний использует фиксированную последовательность обучаемых фильтров заранее определенных размеров для извлечения информации в увеличивающемся пространственном или временном масштабе, начальная сеть обладает гибкостью, чтобы самостоятельно изучить оптимальную комбинацию и последовательность применимых размеров фильтров, тем самым увеличивая репрезентативную мощность сеть.
Сеть по существу состоит из четырех идентичных блоков и одного остаточного скипового соединения непосредственно со входа. На самом деле, эти блоки называются в литературе «начальными блоками». Потому что в каком-то смысле их можно рассматривать как вложенные сети внутри полной сети.
Рисунок 5. Один начальный блок, используемый в архитектуре InceptionTime (источник: arxiv ).
В каждом начальном блоке входные данные отображаются через слой узкого места (ядро размера 1 без смещения) на три отдельных одномерных слоя свертки с размерами по временному измерению 10, 20 и 40 (для захвата разных временных масштабов). Тот же вход передается через максимальный пул на дополнительный сверточный слой, который должен захватывать функции из сигнала с пониженной частотой дискретизации. Выходные данные нормализуются в пакетном режиме и проходят через функцию активации. В конце концов, сумма выходных данных последнего начального блока и остаточного соединения проходит через пул глобальных средних значений, чтобы удалить измерение времени для классификации.
При реализации архитектуры InceptionTime был внесен ряд изменений в исходную архитектуру, представленную в статье:
- Сверточный слой после MaxPool внутри начального блока имеет размер ядра 10 вместо 1 (точность ~3%).
- Все сверточные слои имеют активацию ReLU вместо линейной (с точностью ~ 1%)
- К сверточным слоям, не являющимся узкими местами, применены смещения (с точностью ~2%)
Мы пропускаем окна, которые не имеют энергии, и применяем методы увеличения, чтобы уменьшить чувствительность к вращению и возможному снятию отпечатков пальцев устройства, тем самым предотвращая переоснащение модели шумом конкретного устройства. Для процедуры обучения мы использовали спотовые инстансы MLflow и AWS. На обучение модели на приличном экземпляре графического процессора ушло примерно сутки.
Используя эту архитектуру, мы можем достичь точности ~87% в классификации окон датчиков, тем самым превзойдя наш текущий классификатор транспорта только для датчиков на устройстве, который достигает точности 84%. На следующем шаге мы отбрасываем окончательные слои модели и используем фиксированные веса, чтобы получить вложение размера 8 для каждого окна.
На следующем шаге мы отбрасываем окончательные слои модели и используем фиксированные веса, чтобы получить вложение размера 8 для каждого окна.
Чтобы использовать возможности больших объемов немаркированных данных и избежать двухэтапной процедуры маркировки, в настоящее время мы изучаем варианты использования неконтролируемых и полуконтролируемых подходов к обучению для обучения модели встраивания.
Шаг 3. Классификатор поездок
Если мы предположим, что мы загружаем всю поездку и стремимся сразу получить сегментацию, мы могли бы использовать двунаправленную LSTM или аналогичную модель, но на самом деле мы хотим добиться классификации почти в реальном времени. Цель состоит в том, чтобы найти золотую середину между точностью и удобством использования, чего мы можем достичь, улучшив время отклика. Проведя несколько экспериментов, мы выяснили, что вводя задержку в 3 минуты, мы жертвуем погрешностью всего 1-2%.
Рис. 6. Точность по отношению к задержке сигнала указывает на то, что при 180-секундном интервале мы достигаем убывающей отдачи , Mathias Persev, et. al., arxiv) на встраиваниях, полученных из 31 окна (каждое представляет 18-е) и возвращающих классификации на 21-й позиции (соответствующей 3-минутному отставанию). Есть и другие статьи, использующие U-Net в аналогичной области, например, 9.0142 Распознавание активности человека на основе датчика движения с использованием U-Net (2019, Yong Zhang, et.al., ieee). Основное изменение по сравнению с оригиналом заключается в том, что мы отказались от использования расширений и в итоге использовали только два слоя с активациями elu .
al., arxiv) на встраиваниях, полученных из 31 окна (каждое представляет 18-е) и возвращающих классификации на 21-й позиции (соответствующей 3-минутному отставанию). Есть и другие статьи, использующие U-Net в аналогичной области, например, 9.0142 Распознавание активности человека на основе датчика движения с использованием U-Net (2019, Yong Zhang, et.al., ieee). Основное изменение по сравнению с оригиналом заключается в том, что мы отказались от использования расширений и в итоге использовали только два слоя с активациями elu .
Архитектура U-net по своей сути также является сверточной, однако она позволяет сегментировать входные данные, а не просто назначать один класс набору в целом. Это достигается за счет того, что сначала выполняется классификация на уровне пикселей (или в нашем случае на уровне временного окна), которая разбивает входные данные на набор классифицированных блоков. Таким образом, смена класса в соседних блоках означает границу, которая в нашем случае является сменой вида транспорта.
Рис. 7. Архитектура U-Time, представленная в статье об этапах сна (источник: arxiv ).
На самом деле, мы обогащаем входные эмбеддинги, добавляя данные от GPS-фиксаций (скорость, точность) и различные функции ГИС, такие как расстояния до ближайшего автобусного маршрута, автобусной остановки или железной дороги, рассчитанные для заданных координат.
Рис. 8. Прогноз по скользящему 9-минутному окну (слева) и сообщаемому транспортному режиму с индексом 21 (справа).
Знаете ли вы, что Keras позволяет загружать модели в слой TimeDistributed?? В идеале мы могли бы обучить встраивание и классификатор за один раз, но требуемое время выполнения увеличилось, поэтому в итоге мы использовали двухэтапный процесс обучения.
Рисунок 9. Конструкция модели Keras, включающая InceptionTime в качестве слоя TimeDistributed.
Шаг 4. Развертывание на Edge
Чтобы запустить модель на устройстве, мы решили использовать tflite . Поскольку мы будем использовать одну и ту же среду выполнения для различных компонентов машинного обучения, наша конструкция достаточно гибкая и напоминает компьютерное определение фон Неймана — приходят новые входные данные и память (состояние), а tflite выводит предсказание и новое состояние.
Поскольку мы будем использовать одну и ту же среду выполнения для различных компонентов машинного обучения, наша конструкция достаточно гибкая и напоминает компьютерное определение фон Неймана — приходят новые входные данные и память (состояние), а tflite выводит предсказание и новое состояние.
Рисунок 10. Конечный автомат с использованием tflite, который позволяет сохранять вложения на уровне датчиков, необходимые для будущих выводов.
В случае нашего транспортного классификатора мы храним вложение последних 30 окон в состоянии, чтобы, учитывая новые данные датчиков, мы могли построить вложение, используя InceptionTime, и передать конкатенированные вложения в U-Time.
Итак, в начале поездки наш SDK собирает 18-секундное окно акселерометра и последнее исправление GPS и передает их вместе с фиктивным состоянием (заполненным -1) модели tflite . Он получает классификацию -1 (в течение первых 3 минут) и обновленное состояние. На следующем этапе SDK отвечает за передачу нового окна датчика и предыдущего состояния модели. Обратите внимание, что, поскольку наша модель отстает на 3 минуты, мы использовали метод обучения с подкладкой. Мы продолжаем вызывать модель в течение 3 минут (задавая значения заполнения) после завершения поездки, чтобы получить все классификации.
Обратите внимание, что, поскольку наша модель отстает на 3 минуты, мы использовали метод обучения с подкладкой. Мы продолжаем вызывать модель в течение 3 минут (задавая значения заполнения) после завершения поездки, чтобы получить все классификации.
Возможно, вас интересует влияние батареи по сравнению с моделями, работающими в облаке. Интересно, что запуск модели на устройстве потребляет такое же (а в некоторых случаях даже меньше) количество энергии. Основная причина в том, что нам не нужно отправлять большие объемы данных на серверную часть, что позволяет сэкономить много трафика.
Производительность
При использовании только данных акселерометра со скоростью и точностью из GPS-фиксаций и оценке на проверочном наборе (состоящем из пользователей, которых модель никогда не видела во время обучения) мы достигаем 9Общая точность 1% (для холостого хода, ХОДЬБЫ, БЕГА, ЕЗДЫ НА ВЕЛОСИПЕДЕ, ЖЕЛЕЗНОДОРОЖНОМ СРЕДСТВЕ, ТРАНСПОРТНОМ СРЕДСТВЕ). Мы можем идентифицировать БЕГ, ВЕЛОСИПЕД и ТРАНСПОРТНОЕ СРЕДСТВО с точностью> 95%. Обратите внимание, что используя только сигнал датчика, почти невозможно отличить АВТОМОБИЛЬ и АВТОБУС, поэтому эти классы объединены в один класс — ТРАНСПОРТНОЕ СРЕДСТВО.
Обратите внимание, что используя только сигнал датчика, почти невозможно отличить АВТОМОБИЛЬ и АВТОБУС, поэтому эти классы объединены в один класс — ТРАНСПОРТНОЕ СРЕДСТВО.
Включая функции ГИС (расстояние до ближайшего автобусного маршрута, автобусной остановки, железной дороги и т. д.), которые можно вычислить на устройстве, сохраняя конфиденциальность и запрашивая только фрагменты карты, мы можем разделить АВТОМОБИЛЬ и АВТОБУС, а также отличить ПОЕЗД от ТРАМВАЙ / МЕТРО, сохраняя общую точность на уровне ~ 90%.
Чтобы понять, насколько хорошо он работает в отдельных поездках, давайте рассмотрим некоторые случаи. На рисунке 11 вы можете увидеть три отдельных отключения и прогнозируемую вероятность. Он отображается сверху, показывая, что наши прогнозы стабильны в течение поездки.
Рис. 11. Три индивидуальных мультимодальных рейса. В каждом случае прогнозируемая вероятность вида транспорта
отображается вверху, а фактический вид транспорта внизу (фиолетовый — железнодорожный, оранжевый — пешеходный, синий — автомобильный, коричневый — беговой).