

Содержание
Классификация регуляторов
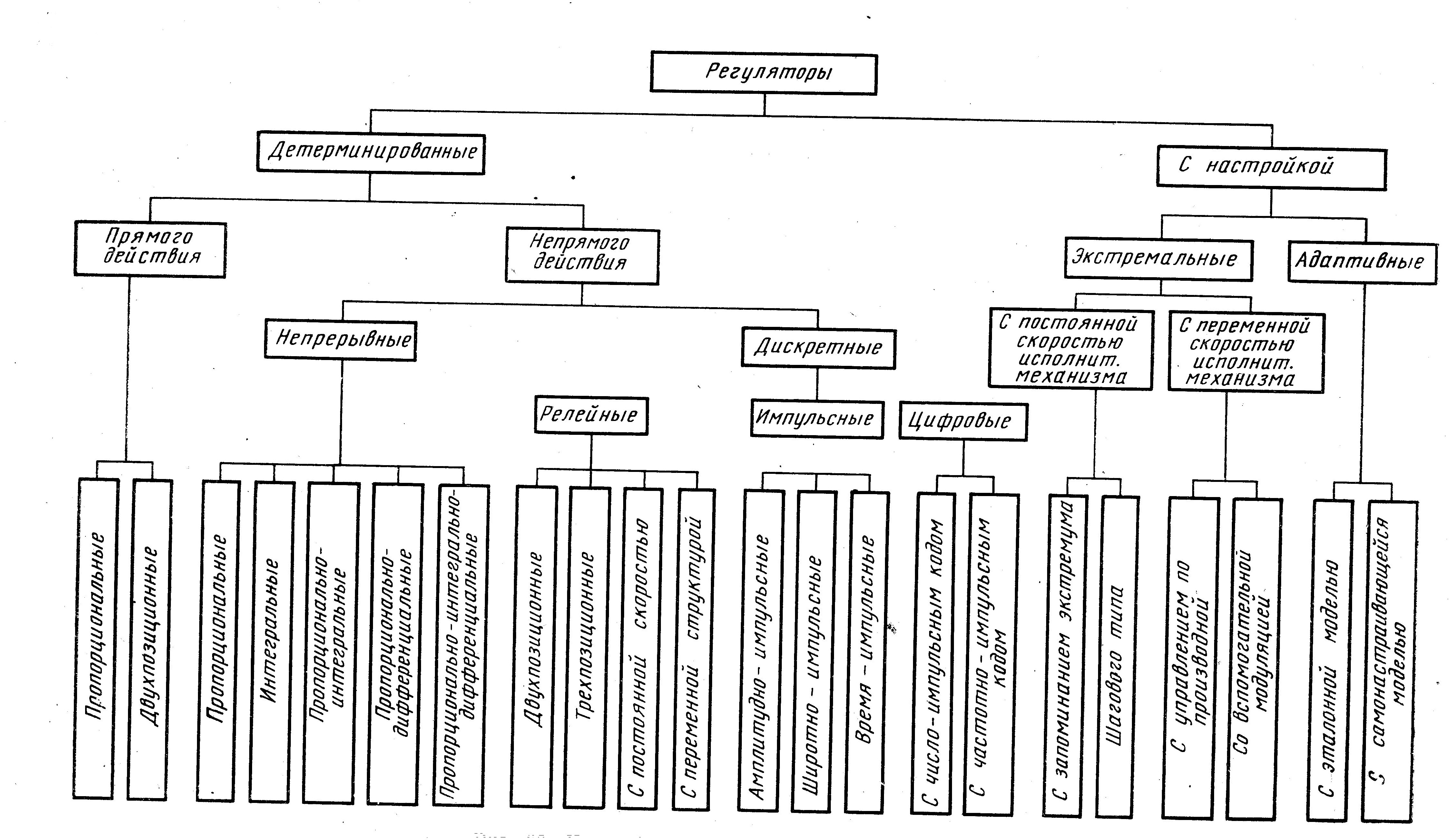
Автоматические регуляторы классифицируются
по разным признакам:
по виду регулируемого параметра, по
роду и способу действия, по характеристике
действия и т.д.
В зависимости от вида регулируемой
величиныразличают регуляторы:
давления, расхода, уровня, температуры
и др. конструкция этих регуляторов может
быть самой разнообразной, однако часто
одна и та же конструкция применяется
для регулирования различных параметров.
По роду действияавтоматические
регуляторы подразделяются на регуляторы
прерывистого и непрерывного действия.
Регуляторами прерывистого действия
называют такие, у которых регулирующий
орган перемещается только при достижении
непрерывно изменяющейся регулируемой
величины определенных заданных значений.
Регуляторами непрерывного действия
называются такие, регулирующий орган
которых при непрерывном изменении
регулируемой величины перемещается
непрерывно.
По способу действияразличают
регуляторы косвенного и прямого действия.
Регуляторами косвенного (непрямого)
действия называются такие, у которых
для перемещения регулирующего органа
используется энергия, подводимая извне.
По виду подводимой энергии регуляторы
косвенного действия подразделяются на
пневматические, электрические и
гидравлические. Регуляторами прямого
действия называются такие, в которых
для перемещения регулирующего органа
используется энергия, взятая у самого
регулируемого органа. Регуляторы прямого
действия отличаются простотой конструкции,
они дешевы и несложны в обслуживании,
надежны в работе. Однако пониженная
чувствительность и невысокая точность
ограничивают область их применения.
Рассмотренные выше виды классификации
регуляторов не являются определяющими,
так как не характеризуют их свойства.
Основной признак, по которому
классифицируются регуляторы независимо
от принадлежности к одной из перечисленных
выше групп, является характеристика
действия, т. е. зависимость между изменением
е. зависимость между изменением
регулируемой величины и перемещением
регулирующего органа (закон
регулирования).
По характеру действия регуляторы
подразделяются на следующие:
Обозначение
Позиционные
Пз-регуляторы
Интегральные
И-регуляторы
Пропорциональные
П-регуляторы
Пропорционально-интегральные
ПИ-регуляторы
Пропорционально-дифференциальные
ПД-регуляторы
Пропорционально-интегрально-
ПИД-регуляторы
дифференциальные
Рис. 2. Обозначения входной и выходной
величин регулятора.
Δy– разбаланс;
μ – перемещение регулирующего органа.
Входной величиной регулятора является
сигнал, пропорциональный разности между
заданным и текущим значениями управляемой
(регулируемой) величины; выходной –
положение регулирующего органа (рис.
2).
Наиболее распространенными критериями
качества регулирования являются:
— статическая и динамическая ошибки
регулирования;
— время регулирования;
— степень колебательности;
— интегральные критерии.
Рис.1. Критерии качества процесса
регулирования
Из графика (рис.1) легко определить
некоторые критерии качества, а именно:
— статическая ошибка устравна
разности между установившимся значением
регулируемой величины ууи ее
заданным значением узад.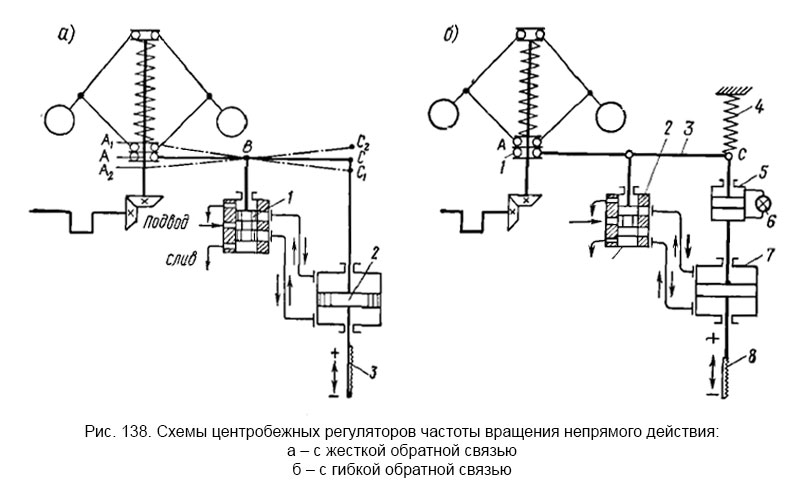
— динамическая ошибка удин равна
наибольшему отклонению в переходном
процессе регулируемой величины уу
и ее заданным значением узад.
— время регулирования tр
приближенно равно времени, за которое
регулируемая величина станет практически
равна заданной или установившейся (на
графике – установившейся уу).
— степень колебательности характеризует
интенсивность затухания колебательного
процесса, причем не всего переходного
процесса, а наиболее медленно затухающей
составляющей. Количественной оценкой
интенсивности затухания служит степень
затухания ψ, определяемая по формуле:
ψ = (у1– у3)/у1.
Наиболее часто на практике значения ψ
лежат в пределах от 0,75 до 0,9.
Для оценки качества работы АСР
существенными являются следующие
вопросы: приведет ли регулятор регулируемую
величину точно к заданному значению
или будет иметь место статическая
ошибка; какова максимальная величина
разбаланса в ходе регулирования; каково
быстродействие системы, т. е.как быстро
е.как быстро
завершится переходный процесс.
Классификация регуляторов: Астатические, Программные — MirMarine
В зависимости от характера воздействия регуляторов на объект регулирования значение регулируемой величины поддерживается по-разному.
Астатические (интегральные) регуляторы обеспечивают постоянное значение регулируемой величины независимо от величины возмущающего воздействия на объект. Однако они не обладают необходимой устойчивостью. Это выражается в том, что хотя среднее значение регулируемой величины поддерживается постоянным, она может колебаться около среднего значения длительное время (рис. 137, б).
Статические регуляторы поддерживают регулируемую величину с некоторым отклонением (статической ошибкой), зависящим от величины возмущающего воздействия. При максимальном значении возмущающего воздействия статическая ошибка будет наибольшей. Статические регуляторы, у которых регулируемая величина отклоняется пропорционально изменению возмущающего воздействия, называются пропорциональными. Статические регуляторы работают устойчиво, с малым временем переходного режима (рис. 137, а и 138, а).
Статические регуляторы работают устойчиво, с малым временем переходного режима (рис. 137, а и 138, а).
Изодромные (пропорционально-интегральные) регуляторы состоят из элементов астатического и статического регулирования. Они обладают достаточной устойчивостью при нулевой статической ошибке (рис. 138, б).
Программные регуляторы осуществляют регулирование по заданной программе. Регуляторы имеют дополнительные элементы, автоматически изменяющие установку задатчика в зависимости от нагрузки, времени или других параметров.
Двухпозиционные регуляторы обеспечивают поддержание регулируемой величины в заданном диапазоне (промежутке) значений. Такие регуляторы работают по принципу «включен—выключен», т. е. регулирующий орган переставляется в одно из двух возможных положений «Открыт—Закрыт».
В зависимости от происхождения усилия, перемещающего регулирующий орган, регуляторы подразделяют на регуляторы прямого- действия и регуляторы непрямого действия.
Регулятор прямого действия — такой регулятор, у которого ре-гулирующий орган перемещается за счет энергии, развиваемой измерительным органом. Схема такого регулятора показана на рис. 137, а. От вала двигателя через коническую передачу вращение передается центробежному маятниковому измерителю. При установившемся режиме работы двигателя центробежная сила, развиваемая грузами 2, уравновешивается натяжением пружины 1, а также массами грузов и муфты. Топливная рейка 5, связанная рычагом 4 с шарнирной муфтой 3, будет неподвижна. Количество подаваемого топлива соответствует нагрузке двигателя, и частота вращения вала равна заданному.
При увеличении нагрузки на двигатель частота вращения вала начнет понижаться. Центробежная сила грузов будет уменьшаться, и под воздействием пружины муфта станет перемещаться вниз. При перемещении муфты топливная рейка будет передвигаться в сторону увеличения подачи топлива, восстанавливая частоту вращения двигателя. В результате наступит равновесие при новом установившемся режиме, соответствующем новой нагрузке двигателя. Однако частота вращения вала не станет равной первоначальному значению. При увеличении нагрузки частота вращения вала будет несколько меньше, а при уменьшении нагрузки — несколько больше исходной. Это значит, что рассматриваемый регулятор является статическим. Разность между значениями частоты вращения, поддерживаемой регулятором при максимальной нагрузке и нагрузке холостого хода, равна статической ошибке регулятора.
Однако частота вращения вала не станет равной первоначальному значению. При увеличении нагрузки частота вращения вала будет несколько меньше, а при уменьшении нагрузки — несколько больше исходной. Это значит, что рассматриваемый регулятор является статическим. Разность между значениями частоты вращения, поддерживаемой регулятором при максимальной нагрузке и нагрузке холостого хода, равна статической ошибке регулятора.
Для сглаживания резких рывков регулятора при быстром изменении нагрузки двигателя предусмотрен каттаракт, или демпфер. Он состоит из заполненного маслом цилиндра 7, поршень которого связан с рычагом 4. Обе полости цилиндра соединяются между собой через игольчатый клапан 6, которым регулируется скорость протекания масла.
Преимущество регуляторов прямого действия заключается в простоте их конструкции. Однако для получения больших перестановочных усилий, необходимых для перемещения регулирующих органов, массы чувствительных элементов должны быть большими, что не всегда целесообразно. Кроме этого, из-за трения в рычагах и опорах, слабины в соединениях и т. п. регуляторы прямого действия обладают значительной нечувствительностью. Они используются для регулирования температуры и давления охлаждающей воды, топлива и масла, частоты вращения маломощных дизелей, а также в качестве предельных — для ограничения частоты вращения главных и вспомогательных дизелей.
Кроме этого, из-за трения в рычагах и опорах, слабины в соединениях и т. п. регуляторы прямого действия обладают значительной нечувствительностью. Они используются для регулирования температуры и давления охлаждающей воды, топлива и масла, частоты вращения маломощных дизелей, а также в качестве предельных — для ограничения частоты вращения главных и вспомогательных дизелей.
Регулятор непрямого действия — такой регулятор, в котором регулирующий орган перемещается за счет вспомогательной энергии от постороннего источника. В таких регуляторах между чувствительным элементом и регулирующим органом имеется усилительное устройство и исполнительный механизм (сервомотор). Так как измерительный орган регулятора не осуществляет силового воздействия на регулирующий орган, масса его подвижных частей может быть минимальной. Благодаря этому область применения регуляторов непрямого действия практически неограничена.
В качестве вспомогательной энергии обычно используется минеральное масло давлением 6—10 бар или очищенный воздух давлением 2—10 бар.
Регуляторы непрямого действия могут быть без обратных связей и с обратными связями. Обратные связи бывают жесткими и гибкими.
Регулятор непрямого действия без обратной связи для регулирования частоты вращения двигателя изображен на рис. 137, б. Усилителем здесь является отсечной гидравлический золотник 4, а исполнительным механизмом — гидравлический поршневой сервомотор 5 двустороннего действия.
Сервомотор связан с регулирующим органом — топливной рейкой 6. В качестве вспомогательной энергии используется масло под давлением, которое подводится к усилительному золотнику 4 и от него к верхней или нижней полостям сервомотора 5. Когда частота вращения двигателя равна заданному значению, окна золотника усилителя, сообщающие его с полостями сервомотора, перекрыты, и поршень сервомотора неподвижен. В этом установившемся режиме количество подаваемого топлива соответствует нагрузке двигателя.
При уменьшении нагрузки на двигатель частота вращения вала будет возрастать. В результате этого грузы 2 центробежного измерителя начнут расходиться, сжимая пружину 1, и через муфту 3 и рычаг будут опускать золотник 4. Через открывающееся нижнее окно усилителя масло начнет поступать в полость над поршнем 5 сервомотора, перемещая его вниз, а топливную рейку 6 — в направлении уменьшения подачи топлива. Одновременно с этим масло из-под поршня сервомотора через открытое верхнее окно усилителя будет выходить на слив. Когда частота вращения снизится до первоначального значения, золотник 4, возвращаясь вверх, закроет окна усилителя, и перемещение поршня сервомотора прекратится. Топливной рейкой будет установлена уменьшенная подача топлива, соответствующая меньшей нагрузке двигателя. В новом равновесном режиме частота вращения двигателя вновь станет равна заданной. Таким образом, этот регулятор относится к астатическим. Его целесообразно применять в тех случаях, когда объект обладает саморегулированием.
В результате этого грузы 2 центробежного измерителя начнут расходиться, сжимая пружину 1, и через муфту 3 и рычаг будут опускать золотник 4. Через открывающееся нижнее окно усилителя масло начнет поступать в полость над поршнем 5 сервомотора, перемещая его вниз, а топливную рейку 6 — в направлении уменьшения подачи топлива. Одновременно с этим масло из-под поршня сервомотора через открытое верхнее окно усилителя будет выходить на слив. Когда частота вращения снизится до первоначального значения, золотник 4, возвращаясь вверх, закроет окна усилителя, и перемещение поршня сервомотора прекратится. Топливной рейкой будет установлена уменьшенная подача топлива, соответствующая меньшей нагрузке двигателя. В новом равновесном режиме частота вращения двигателя вновь станет равна заданной. Таким образом, этот регулятор относится к астатическим. Его целесообразно применять в тех случаях, когда объект обладает саморегулированием.
Регуляторы непрямого действия без обратной связи используют для регулирования температуры и давления охлаждающей воды, масла, топлива, а также применяют в качестве предельных — для
ограничения частоты вращения главных дизелей.
Регулятор непрямого действия с жесткой обратной связью показан на рис. 138, а. В отличие от регулятора, рассмотренного ранее, здесь шток сервомотора 2 при помощи рычага жестко соединен с золотником усилителя 1.
При изменении нагрузки и, следовательно, частоты вращения двигателя центробежный измеритель повернет рычаг АВС вокруг точки С, что приведет к перемещению точки Б и с ней золотника усилителя 1. Масло начнет поступать в соответствующую полость сервомотора 2. Двигаясь, поршень сервомотора будет изменять через рейку 3 количество подаваемого топлива и одновременно перемещать точку С, а вместе с ней и рычаг АВС вокруг точки А в противоположном направлении. В результате точка В возвратится в исходное положение, и золотник прекратит подачу масла к сервомотору. Установится новое- равновесное положение, при котором количество подаваемого топлива будет соответствовать нагрузке двигателя.
При уменьшении нагрузки рычаг АВС займет положение А1ВС1, при увеличении нагрузки — А2ВС2.
Жесткая обратная связь оказывает стабилизирующее воздействие, обеспечивая устойчивую работу регулятора. Однако, как нетрудно заметить, такой регулятор относится к статическим и не может обеспечить точного значения регулируемой величины независимо от нагрузки. Величину статической ошибки можно изменять соотношением плеч рычага АВС.
Регуляторы с жесткой обратной связью не получили широкого распространения на дизелях.
Регулятор непрямого действия с гибкой обратной связью обычно называют изодромным или пропорционально-интегральным.
В отличие от жесткой обратной связи гибкая связь прекращает воздействие на золотник усилителя не сразу, а спустя некоторое время после перемещения регулирующего органа. Благодаря этому после каждого изменения нагрузки регулируемая величина вновь достигает первоначального значения. Устройство, осуществляющее дополнительное перемещение регулирующего органа и тем самым приводящее регулируемую величину к первоначальному значению, называется изодромом.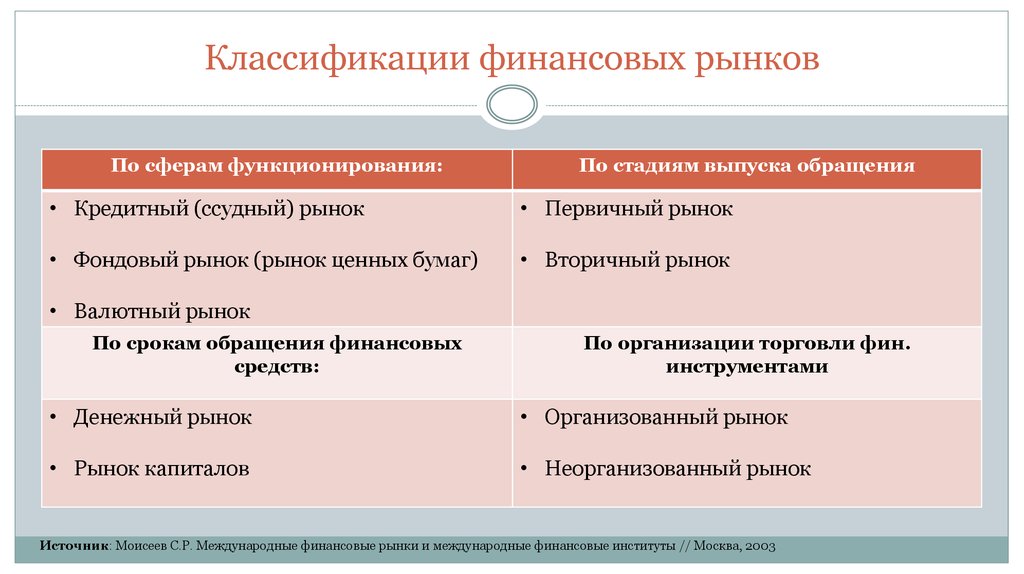
Схема регулятора изображена на рис. 138, б. Между поршнем сервомотора 7 и рычагом 3 обратной связи находится изодром 5, представляющий собой цилиндр с поршнем. Обе полости цилиндра заполнены маслом и сообщены между собой через игольчатый клапан 6. Цилиндр изодрома жестко связан со штоком сервомотора 7, поршень изодрома — с рычагом 3 обратной связи, конец которого подвешен на пружине 4 изодрома. Эта пружина, работающая как на сжатие, так и на растяжение, при установившемся режиме всегда разгружена.
При уменьшении нагрузки частота вращения вала двигателя возрастает. Муфта 1 центробежного измерителя частоты вращения, перемещаясь вверх и поворачивая рычаг АВС вокруг точки С, поднимет золотник усилителя 2. Масло начнет поступать в верхнюю полость сервомотора 7, и его поршень, опускаясь, будет перемещать топливную рейку 8 в направлении уменьшения подачи топлива. Одновременно с поршнем сервомотора будет перемещаться вниз и цилиндр изодрома 5. В начальный момент, благодаря вязкости масла и малому проходному сечению дроссельного клапана б, поршень и цилиндр изодрома перемещаются как одно целое, поворачивая рычаг АВС вокруг точки А по часовой стрелке и растягивая пружину 4. Золотник усилителя 2 придет в среднее положение, и поршень сервомотора остановится.
Золотник усилителя 2 придет в среднее положение, и поршень сервомотора остановится.
Однако так как пружина изодрома в данный момент растянута, то под действием ее силы упругости поршень изодрома начнет перемещаться вверх. При этом рычаг АВС получает дополнительное перемещение вокруг точки А, на этот раз против часовой стрелки. Золотник усилителя поднимается вверх и подает дополнительную порцию масла для опускания поршня сервомотора и дальнейшего уменьшения подачи топлива. Частота вращения двигателя снижается до первоначального значения, муфта регулятора опускается, рычаг АВС возвращается в исходное положение, и золотник прекращает подачу масла к сервомотору. Переходный процесс заканчивается, когда вся система приходит в равновесие на новом установившемся режиме.
Продолжительность переходного процесса зависит от величины открытия дроссельного клапана изодрома. Если закрыть дроссельный клапан, то получится регулятор с жесткой обратной связью; если клапан открыть полностью, то получится регулятор непрямого действия без обратной связи.
Регуляторы с гибкой обратной связью применяют для регулирования любых объектов с быстроизменяющейся нагрузкой, требующих высокой точности поддержания регулируемой величины. Такие регуляторы используют для автоматического регулирования частоты вращения дизель-генераторов, а в последние годы — и главных дизелей, их также можно применять для регулирования вязкости топлива, давления пара во вспомогательных котлах и т. д.
Типы регуляторов напряжения и принцип работы | Артикул
СКАЧАТЬ PDF
Получайте ценные ресурсы прямо на свой почтовый ящик – рассылка раз в месяц
Подписаться
Мы ценим вашу конфиденциальность
Как работает регулятор напряжения?
Регулятор напряжения представляет собой схему, которая создает и поддерживает фиксированное выходное напряжение независимо от изменений входного напряжения или условий нагрузки.
Регуляторы напряжения (VR) поддерживают напряжение от источника питания в диапазоне, совместимом с другими электрическими компонентами. Хотя регуляторы напряжения чаще всего используются для преобразования мощности постоянного тока в постоянный, некоторые из них также могут выполнять преобразование мощности переменного тока в переменный или переменный в постоянный. В этой статье речь пойдет о регуляторах напряжения постоянного/постоянного тока.
Хотя регуляторы напряжения чаще всего используются для преобразования мощности постоянного тока в постоянный, некоторые из них также могут выполнять преобразование мощности переменного тока в переменный или переменный в постоянный. В этой статье речь пойдет о регуляторах напряжения постоянного/постоянного тока.
Типы регуляторов напряжения: линейные и импульсные
Существует два основных типа регуляторов напряжения: линейные и импульсные. Оба типа регулируют напряжение в системе, но линейные стабилизаторы работают с низким КПД, а импульсные стабилизаторы — с высоким КПД. В высокоэффективных импульсных стабилизаторах большая часть входной мощности передается на выход без рассеяния.
Линейные регуляторы
В линейном регуляторе напряжения используется активное проходное устройство (такое как BJT или MOSFET), которое управляется операционным усилителем с высоким коэффициентом усиления. Чтобы поддерживать постоянное выходное напряжение, линейный регулятор регулирует сопротивление проходного устройства, сравнивая внутреннее опорное напряжение с дискретизированным выходным напряжением, а затем сводя ошибку к нулю.
Линейные регуляторы представляют собой понижающие преобразователи, поэтому по определению выходное напряжение всегда ниже входного. Однако у этих стабилизаторов есть несколько преимуществ: они, как правило, просты в конструкции, надежны, экономичны, имеют низкий уровень шума и пульсации выходного напряжения.
Для работы линейных регуляторов, таких как MP2018, требуется только входной и выходной конденсатор (см. рис. 1) . Их простота и надежность делают их интуитивными и простыми устройствами для инженеров, и часто они очень рентабельны.
Рис. 1: Линейный регулятор MP2018
Импульсные регуляторы
Схема импульсного регулятора, как правило, более сложная для проектирования, чем линейный регулятор, и требует выбора номиналов внешних компонентов, настройки контуров управления для обеспечения стабильности и тщательной компоновки схемы.
Импульсные регуляторы могут быть понижающими преобразователями, повышающими преобразователями или их комбинацией, что делает их более универсальными, чем линейные регуляторы.
Преимущества импульсных стабилизаторов заключаются в том, что они высокоэффективны, имеют лучшие тепловые характеристики и могут поддерживать более высокий ток и более широкий диапазон V IN / V OUT приложений. Они могут достигать эффективности более 95% в зависимости от требований приложения. В отличие от линейных стабилизаторов, для импульсной системы питания могут потребоваться дополнительные внешние компоненты, такие как катушки индуктивности, конденсаторы, полевые транзисторы или резисторы обратной связи. HF920 является примером импульсного стабилизатора, обеспечивающего высокую надежность и эффективное регулирование мощности (см. рис. 2) .
Рис. 2. Импульсный регулятор HF920
Ограничения регуляторов напряжения
Одним из основных недостатков линейных регуляторов является то, что они могут быть неэффективными, так как рассеивают большое количество энергии в определенных случаях использования. Падение напряжения линейного регулятора сравнимо с падением напряжения на резисторе.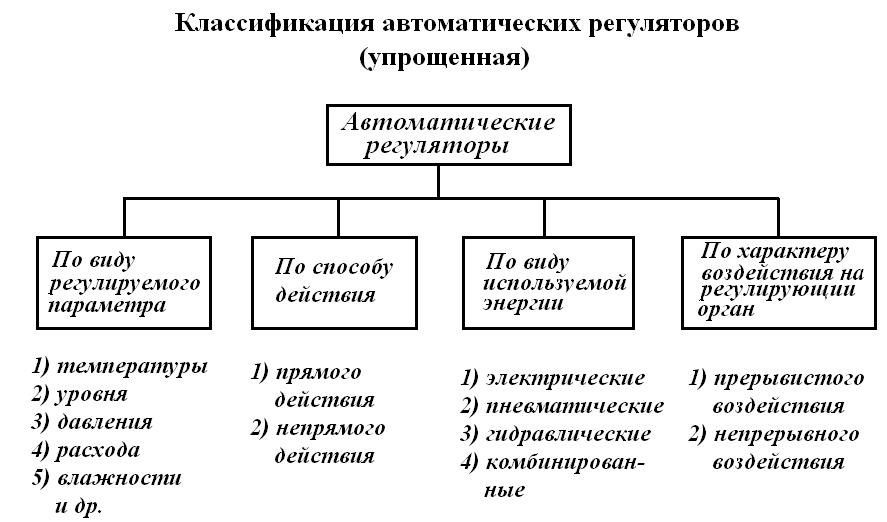 Например, при входном напряжении 5 В и выходном напряжении 3 В между клеммами возникает падение на 2 В, а КПД ограничен 3 В/5 В (60%). Это означает, что линейные регуляторы лучше всего подходят для приложений с более низким напряжением V IN / V OUT дифференциал.
Например, при входном напряжении 5 В и выходном напряжении 3 В между клеммами возникает падение на 2 В, а КПД ограничен 3 В/5 В (60%). Это означает, что линейные регуляторы лучше всего подходят для приложений с более низким напряжением V IN / V OUT дифференциал.
Важно учитывать предполагаемое рассеивание мощности линейного регулятора при применении, поскольку использование более высоких входных напряжений приводит к высокому рассеиванию мощности, что может привести к перегреву и повреждению компонентов.
Другим ограничением линейных стабилизаторов напряжения является то, что они способны только к понижающему (понижающему) преобразованию, в отличие от импульсных стабилизаторов, которые также обеспечивают повышающее (повышающее) и понижающе-повышающее преобразование.
Импульсные стабилизаторы очень эффективны, но некоторые недостатки включают то, что они, как правило, менее рентабельны, чем линейные регуляторы, больше по размеру, более сложны и могут создавать больше шума, если их внешние компоненты не выбраны тщательно. Шум может быть очень важен для данного приложения, так как шум может влиять на работу и характеристики схемы, а также на характеристики электромагнитных помех.
Шум может быть очень важен для данного приложения, так как шум может влиять на работу и характеристики схемы, а также на характеристики электромагнитных помех.
Топологии импульсных регуляторов: понижающий, повышающий, линейный, LDO и регулируемый
Существуют различные топологии линейных и импульсных регуляторов. Линейные регуляторы часто полагаются на топологии с малым падением напряжения (LDO). Импульсные стабилизаторы бывают трех распространенных топологий: понижающие преобразователи, повышающие преобразователи и повышающе-понижающие преобразователи. Каждая топология описана ниже:
Регуляторы LDO
Одной из популярных топологий для линейных стабилизаторов является регулятор с малым падением напряжения (LDO). Линейные стабилизаторы обычно требуют, чтобы входное напряжение было как минимум на 2 В выше выходного напряжения. Однако регулятор LDO предназначен для работы с очень небольшой разницей напряжений между входными и выходными клеммами, иногда всего 100 мВ.
Понижающие и повышающие преобразователи
Понижающие преобразователи (также называемые понижающими преобразователями) принимают более высокое входное напряжение и производят более низкое выходное напряжение. И наоборот, повышающие преобразователи (также называемые повышающими преобразователями) потребляют более низкое входное напряжение и производят более высокое выходное напряжение.
Понижающе-повышающие преобразователи
Понижающе-повышающий преобразователь представляет собой одноступенчатый преобразователь, который сочетает в себе функции понижающего и повышающего преобразователя для регулирования выходного напряжения в широком диапазоне входных напряжений, которые могут быть больше или меньше выходного Напряжение.
Управление регулятором напряжения
Четыре основных компонента линейного регулятора — проходной транзистор, усилитель ошибки, источник опорного напряжения и резисторная цепь обратной связи. Один из входов усилителя ошибки устанавливается двумя резисторами (R1 и R2) для контроля выходного напряжения в процентах. Другой вход представляет собой стабильное опорное напряжение (V REF ). Если выбранное выходное напряжение изменяется относительно V REF , усилитель ошибки изменяет сопротивление проходного транзистора для поддержания постоянного выходного напряжения (V ИЗ ).
Другой вход представляет собой стабильное опорное напряжение (V REF ). Если выбранное выходное напряжение изменяется относительно V REF , усилитель ошибки изменяет сопротивление проходного транзистора для поддержания постоянного выходного напряжения (V ИЗ ).
Для работы линейных регуляторов обычно требуется только внешний входной и выходной конденсаторы, что упрощает их реализацию.
С другой стороны, импульсный регулятор требует больше компонентов для создания цепи. Силовой каскад переключается между V IN и землей для создания пакетов заряда для доставки на выход. Подобно линейному регулятору, имеется операционный усилитель, который считывает выходное напряжение постоянного тока из сети обратной связи и сравнивает его с внутренним опорным напряжением. Затем сигнал ошибки усиливается, компенсируется и фильтруется. Этот сигнал используется для модуляции рабочего цикла ШИМ, чтобы вернуть выход в режим регулирования. Например, если ток нагрузки быстро увеличивается и вызывает падение выходного напряжения, контур управления увеличивает рабочий цикл ШИМ, чтобы обеспечить больший заряд нагрузки и вернуть шину в режим регулирования.
Линейные и импульсные регуляторы
Линейные регуляторы часто используются в приложениях, которые чувствительны к стоимости, шуму, слабому току или ограниченному пространству. Некоторые примеры включают бытовую электронику, такую как наушники, носимые устройства и устройства Интернета вещей (IoT). Например, в таких приложениях, как слуховой аппарат, может использоваться линейный регулятор, поскольку в них нет переключающего элемента, который может создавать нежелательные шумы и мешать работе устройства.
Кроме того, если разработчики в основном заинтересованы в создании недорогого приложения, им не нужно так беспокоиться о рассеиваемой мощности, и они могут положиться на линейный регулятор.
Импульсные регуляторы выгодны для более общих применений и особенно полезны в приложениях, требующих эффективности и производительности, таких как потребительские, промышленные, корпоративные и автомобильные приложения (см. рис. 3) . Например, если приложение требует большого понижающего решения, лучше подойдет импульсный регулятор, так как линейный регулятор может создавать рассеивание высокой мощности, которое может повредить другие электрические компоненты.
Рисунок 3: Понижающий регулятор MPQ4430-AEC1
Каковы основные параметры микросхемы регулятора напряжения?
Некоторые из основных параметров, которые следует учитывать при использовании регулятора напряжения, — это входное напряжение, выходное напряжение и выходной ток. Эти параметры используются для определения того, какая топология VR совместима с IC пользователя.
Другие параметры, включая ток покоя, частоту переключения, тепловое сопротивление и напряжение обратной связи, могут иметь значение в зависимости от применения.
Ток покоя важен, когда эффективность при малой нагрузке или в режиме ожидания является приоритетом. При рассмотрении частоты коммутации в качестве параметра максимизация частоты коммутации приводит к меньшим системным решениям.
Кроме того, тепловое сопротивление имеет решающее значение для отвода тепла от устройства и рассеивания его по системе. Если в состав контроллера входит внутренний МОП-транзистор, то все потери (кондуктивные и динамические) рассеиваются в корпусе и должны учитываться при расчете максимальной температуры ИС.
Напряжение обратной связи — еще один важный параметр, который необходимо проверить, поскольку он определяет минимальное выходное напряжение, которое может поддерживать регулятор напряжения. Стандартно смотреть на опорные параметры напряжения. Это ограничивает более низкое выходное напряжение, точность которого влияет на точность регулирования выходного напряжения.
Как правильно выбрать регулятор напряжения
Чтобы правильно выбрать регулятор напряжения, разработчик должен сначала понять его ключевые параметры, такие как V IN , V OUT , I OUT , системные приоритеты (например, эффективность, производительность, стоимость) и любые дополнительные ключевые функции, такие как индикация исправности (PG) или включение управления.
После того как разработчик определил эти требования, используйте таблицу параметрического поиска, чтобы найти лучшее устройство, отвечающее заданным требованиям. Таблица параметрического поиска является ценным инструментом для проектировщиков, поскольку она предлагает различные функции и пакеты, доступные для соответствия требуемым параметрам вашего приложения.
Каждое устройство MPS поставляется с техническим описанием, в котором указано, какие внешние детали необходимы, и как рассчитать их значения для достижения эффективной, стабильной и высокопроизводительной конструкции. Техническое описание можно использовать для расчета значений компонентов, таких как выходная емкость, выходная индуктивность, сопротивление обратной связи и других ключевых компонентов системы. Кроме того, вы можете использовать инструменты моделирования, такие как DC/DC Designer или программное обеспечение MPSmart, обращаться к примечаниям по применению или обращаться к местному FAE с вопросами.
MPS предлагает широкий выбор эффективных, компактных линейных и импульсных регуляторов напряжения, включая семейство HF500-x, семейство MP171x, MP20056, MP28310, MPQ4572-AEC1 и MPQ2013-AEC1.
Ссылки
Глоссарий по электронике
______________________________
Вы нашли это интересным? Получайте ценные ресурсы прямо на свой почтовый ящик — рассылка раз в месяц!
Технический форум
Получить техническую поддержку
Типы регуляторов напряжения Electronics Hub
В этом руководстве мы познакомимся с одним из наиболее важных компонентов конструкции системы: регуляторами напряжения.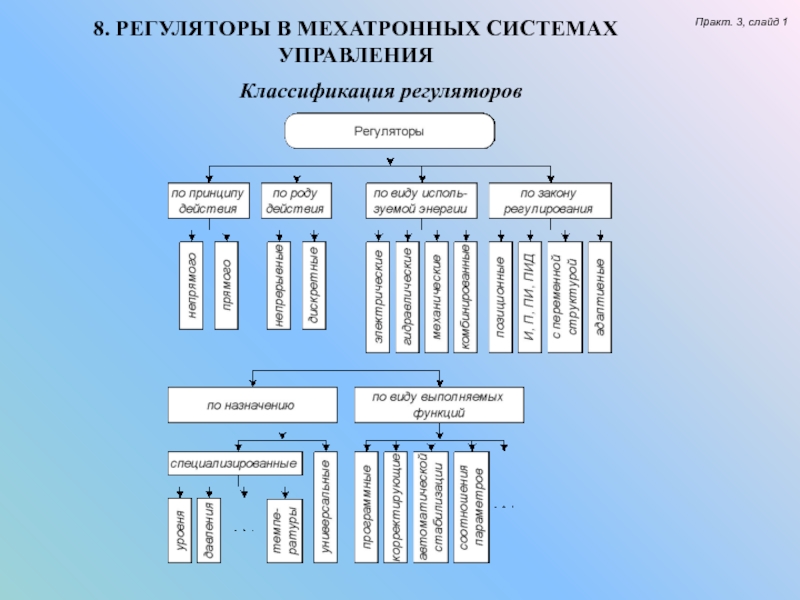 Они являются неотъемлемой частью системы или, если быть точным, частью системы электропитания. Мы узнаем о регуляторах напряжения, о том, какие бывают типы регуляторов напряжения, о принципе работы некоторых важных регуляторов напряжения.
Они являются неотъемлемой частью системы или, если быть точным, частью системы электропитания. Мы узнаем о регуляторах напряжения, о том, какие бывают типы регуляторов напряжения, о принципе работы некоторых важных регуляторов напряжения.
[адсенс1]
Схема
Роль источника питания
Прежде чем углубляться в детали регулятора напряжения и различных типов регуляторов напряжения, мы сначала рассмотрим важность источника питания в конструкции системы.
Возьмем любую функционирующую систему: электронные наручные часы, современный смартфон или портативный компьютер. Как вы думаете, что самое большое существо в целом? Это Блок питания.
Роль источника питания заключается в обеспечении системы надежным, стабильным и воспроизводимым питанием ее компонентов. В контексте электронных устройств источник питания должен обеспечивать постоянную, стабильную и регулируемую мощность для правильной работы цепей.
[адсенс2]
Итак, какие источники питания?
Два основных источника питания: 1.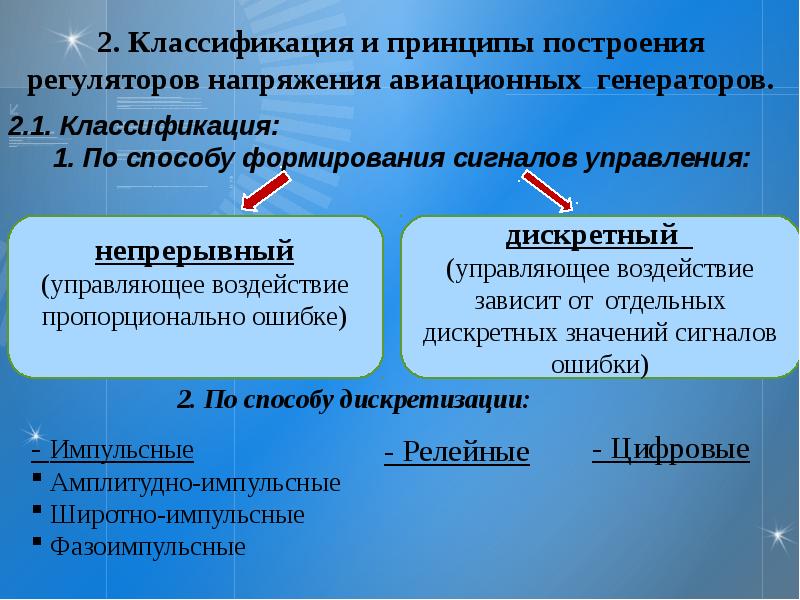 Источник переменного тока от наших сетевых розеток и 2. Источник постоянного тока от батарей.
Источник переменного тока от наших сетевых розеток и 2. Источник постоянного тока от батарей.
ПРИМЕЧАНИЕ: Приведенный выше список основан на доступных источниках питания и источниках энергии.
Несмотря на то, что источник питания легко доступен, он еще не «системно готов». Что это значит? Давайте разберемся в этом на примере компьютерной системы.
Как правило, компьютерная система, а точнее электроника компьютерной системы требуют регулируемого постоянного напряжения. ЦП работает при напряжении от 1,2 В до 1,8 В постоянного тока (зависит от ЦП), порты USB работают при напряжении 5 В постоянного тока, для механических жестких дисков требуется напряжение как 5 В, так и 12 В постоянного тока и так далее.
Если напряжение выше или ниже требуемой величины, компонент может не работать или, в худшем случае, может выйти из строя и не подлежит ремонту. Итак, важно «отрегулировать» напряжение до допустимого диапазона.
Здесь на помощь приходят регуляторы напряжения. Источником может быть питание переменного тока от сетевой розетки или питание постоянного тока от батарей, требование любой электронной системы одинаково: регулируемое напряжение постоянного тока.
Источником может быть питание переменного тока от сетевой розетки или питание постоянного тока от батарей, требование любой электронной системы одинаково: регулируемое напряжение постоянного тока.
Регуляторы напряжения
Регулятор напряжения — это устройство или схема, обеспечивающая подачу постоянного напряжения на электронную нагрузку. На следующем изображении показан типичный блок питания с регулятором напряжения.
Как упоминалось ранее, задача источника питания постоянного тока состоит в том, чтобы получать переменный ток от сетевых розеток (обычно 240 В при частоте 50 Гц) и преобразовывать его в постоянный постоянный ток. В этом процессе переменное напряжение от сети сначала выпрямляется с помощью схемы выпрямителя для получения пульсирующего постоянного напряжения.
Этот пульсирующий постоянный ток затем фильтруется для получения относительно плавного напряжения. Наконец, регулятор напряжения обеспечивает постоянное выходное напряжение.
Компоненты регулятора напряжения
Вообще говоря, ступень регулятора напряжения источника питания обычно состоит из трех компонентов:
- Цепь обратной связи
- Стабильное опорное напряжение
- Цепь управления проходным элементом
Процесс регулирования напряжения прост. Цепь обратной связи помогает обнаруживать изменения выходного напряжения постоянного тока. В зависимости от обратной связи и опорного напряжения затем вырабатывается управляющий сигнал для управления проходным элементом для компенсации изменений.
Цепь обратной связи помогает обнаруживать изменения выходного напряжения постоянного тока. В зависимости от обратной связи и опорного напряжения затем вырабатывается управляющий сигнал для управления проходным элементом для компенсации изменений.
Говоря о проходном элементе, это твердотельное полупроводниковое устройство, такое как PN-диод, BJT-транзистор или полевой МОП-транзистор. Теперь выходное напряжение D поддерживается почти постоянным.
Различные типы регуляторов напряжения
Регуляторы напряжения могут быть реализованы с использованием схем на дискретных компонентах или интегральных схем. Независимо от исполнения регуляторы напряжения можно разделить на два типа:
- Линейные регуляторы напряжения
- Импульсные регуляторы напряжения
Принимая во внимание приведенное выше обсуждение компонентов регулятора напряжения и его основных функций, предположим, что проходным элементом в цепи регулятора напряжения является транзистор.
Этот транзистор может работать либо в своей активной области, либо в качестве переключателя для регулирования выходного напряжения. Если транзистор остается в активной области или омической области или линейной области своей работы в процессе регулирования напряжения, то регулятор называется линейным регулятором напряжения.
Когда транзистор работает в состоянии отсечки и состоянии насыщения, т. е. он переключается между состоянием выключения и состоянием насыщения, тогда регулятор называется импульсным регулятором напряжения.
Теперь давайте углубимся в оба этих регулятора напряжения и подробнее рассмотрим их работу и типы.
Линейные регуляторы напряжения
Исходной формой регуляторов для регулирования источников питания являются линейные регуляторы напряжения. В линейном регуляторе напряжения переменная проводимость активного проходного элемента (обычно BJT или MOSFET) отвечает за регулирование выходного напряжения.
Когда подключена нагрузка, изменения либо на входе, либо на нагрузке приведут к изменению тока через транзистор, так что выход останется постоянным.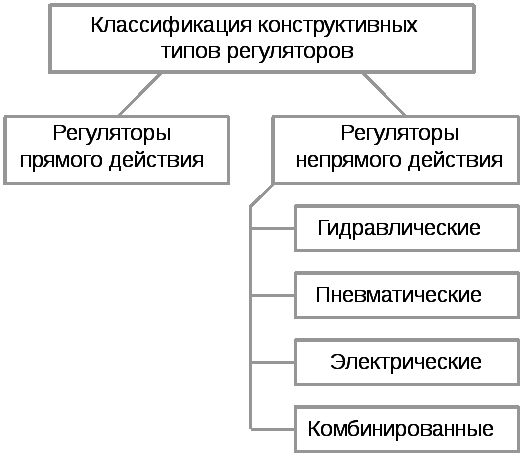 Чтобы транзистор мог изменять свой ток (ток коллектор-эмиттер в случае BJT), он должен работать в активной или омической области (также известной как линейная область).
Чтобы транзистор мог изменять свой ток (ток коллектор-эмиттер в случае BJT), он должен работать в активной или омической области (также известной как линейная область).
Во время этого процесса линейный регулятор напряжения тратит много энергии в виде сетевого напряжения, т. е. разница между входным и выходным напряжением сбрасывается в транзисторе и рассеивается в виде тепла.
Обычно линейные регуляторы напряжения подразделяются на пять категорий. Это:
- Регулируемые регуляторы положительного давления
- Негативные регулируемые регуляторы
- Регуляторы с фиксированным выходом
- Регуляторы слежения
- Плавающие регуляторы
Примером положительно регулируемых линейных регуляторов напряжения является известная микросхема регулятора LM317. Выходное напряжение LM317 можно регулировать в диапазоне от 1,2 В до 37 В.
Что касается линейных регуляторов напряжения с фиксированным выходом, то знаменитая серия ИС регуляторов напряжения 78XX подпадает под эту категорию. 7805 — широко используемый стабилизатор постоянного напряжения с выходным напряжением 5 В.
7805 — широко используемый стабилизатор постоянного напряжения с выходным напряжением 5 В.
Преимущества линейных регуляторов напряжения
Преимущества линейных регуляторов напряжения заключаются в следующем:
- Реализация линейных регуляторов напряжения очень проста и ими легко пользоваться.
- Несмотря на рассеиваемую мощность, линейные регуляторы напряжения обладают надежной защитой от перегрузки по току и тепловой защитой.
- требуется очень мало внешних компонентов. Стационарные регуляторы напряжения почти не требуют внешних компонентов (может быть пара шунтирующих конденсаторов).
- При низкой стоимости у вас есть широкий выбор напряжения и тока.
Для работы регулируемых регуляторов напряжения
Недостатки линейных регуляторов напряжения
Недостатки линейных регуляторов напряжения следующие:
- Обычно линейные регуляторы напряжения являются только понижающими, т.е. выходное напряжение всегда меньше входного.

- При работе от сети переменного тока требуется понижающий трансформатор для доведения напряжения до рабочего уровня. Поэтому они обычно громоздкие.
- Поскольку регулирование осуществляется путем рассеивания избыточной мощности в виде тепла, они имеют тенденцию сильно нагреваться, и использование радиатора неизбежно.
- Кроме того, эффективность линейных регуляторов обычно очень мала, где-то между 20% и 60%.
Кроме того, линейные регуляторы напряжения снова классифицируются в зависимости от способа подключения нагрузки. Это:
- Регуляторы напряжения серии
- Шунтирующие регуляторы напряжения
Давайте теперь кратко рассмотрим оба этих типа линейных регуляторов напряжения.
Серийный регулятор напряжения
Если в линейных регуляторах напряжения активный проходной элемент, например, транзистор, соединен последовательно с нагрузкой, то он называется последовательным регулятором напряжения.
На следующей схеме показан типичный линейный последовательный регулятор напряжения.
В этой схеме выходное напряжение регулятора измеряется через цепь делителя напряжения R1 и R2. Это напряжение сравнивается с эталонным напряжением V REF . Результирующий сигнал ошибки будет контролировать проводимость проходного транзистора.
В результате напряжение на транзисторе изменяется, а выходное напряжение на нагрузке поддерживается практически постоянным.
Тип последовательного стабилизатора напряжения — стабилизатор напряжения на стабилитроне, который может поддерживать постоянное напряжение на нагрузке.
Этот тип регулятора напряжения может уменьшить пульсации в источнике питания и улучшить регулирование. Но из-за ненулевого сопротивления Зенера эффективность низкая. Это можно улучшить, ограничив ток Зенера.
Шунтовой регулятор напряжения
Шунтовой регулятор напряжения отличается от последовательного регулятора напряжения. Если проходной транзистор в линейном регуляторе напряжения подключен параллельно нагрузке, то регулятор называется шунтирующим регулятором напряжения.
Дополнительно последовательно с нагрузкой подключен резистор ограничения напряжения. На следующем изображении показан типичный шунтирующий регулятор напряжения.
В этой схеме проводимость транзистора регулируется на основе обратной связи и опорного напряжения таким образом, что ток через последовательный резистор остается постоянным. При изменении тока через транзистор напряжение на нагрузке остается практически постоянным.
По сравнению с последовательными регуляторами шунтирующие регуляторы немного менее эффективны, но имеют более простую реализацию.
Импульсные регуляторы напряжения
Как в линейных регуляторах напряжения, т. е. в последовательном регуляторе, так и в шунтирующем регуляторе, активный проходной элемент, т. е. транзистор, работает в своей линейной области. Изменяя проводимость транзистора, выходное напряжение поддерживается на желаемом уровне.
Напротив, импульсный регулятор работает немного иначе, чем линейный регулятор в том смысле, что проходной транзистор действует как переключатель, т. е. он либо остается в выключенном состоянии (область отсечки), либо во включенном состоянии (область насыщения).
е. он либо остается в выключенном состоянии (область отсечки), либо во включенном состоянии (область насыщения).
Регулируя время включения проходного транзистора, выходное напряжение поддерживается на постоянном уровне.
Блок-схема типичного импульсного источника питания показана ниже.
На самом деле, есть отдельное руководство по импульсному источнику питания или SMPS с работой, типами и их работой. Для получения дополнительной информации см. «Импульсный блок питания ».
Преимущества импульсного регулятора напряжения
- Основным преимуществом импульсного источника питания или импульсного регулятора напряжения является эффективность. Обычно с лучшей расчетной эффективностью до 95% можно получить.
- Поскольку транзистор колеблется между состояниями ВКЛ и ВЫКЛ, и время его пребывания в активной области очень мало, количество потерянной мощности очень меньше.
- Выходное напряжение может быть больше или меньше входного напряжения.
- Не требует понижающего или повышающего трансформатора, но требует крошечного высокочастотного переключающего трансформатора.
Недостатки импульсных регуляторов напряжения
- Сложность конструкции импульсного источника питания очень высока.
- Из-за частого переключения транзистора и, как следствие, тока транзистора возникают высокие помехи и шумы.
В зависимости от конструкции схемы импульсные регуляторы напряжения можно разделить на две топологии.
- Неизолированные преобразователи
- Изолированные преобразователи
Неизолированные преобразователи также бывают нескольких типов, но наиболее важными из них являются:
- Понижающий регулятор напряжения (понижающий преобразователь)
- Повышающий регулятор напряжения (повышающий преобразователь)
- Понижающий/повышающий преобразователь
В изолированных преобразователях в основном есть два важных типа.
