

Содержание
Методические указания к выполнению курсового проекта и расчётно-графических заданий по дисциплине «Деталям машин», страница 9
Машиностроение \
Детали машин
2.
КИНЕМАТИЧЕСКИЕ СХЕМЫ
РЕДУКТОРОВ И ИХ ПЕРЕДАТОЧНЫЕ ЧИСЛА.
Рис. 2.1. Кинематическая схема цилиндрического
двухступенчатого редуктора с развернутой компоновкой.
,
где
—
общее передаточное число редуктора
U1— полученное
значение округляется до значения стандартного:
1 ряд: 2; 2,5; 3,15; 4;5;
6,3; 8
2 ряд: 2,24; 2,8; 3,55; 4,5;
5,6; 7,1
Рис 2.2. Кинематическая схема цилиндрического
двухступенчатого редуктора с развернутой быстроходной ступенью.
,
где
—
общее передаточное число редуктора
U1—
принимается ближайшее стандартное значение
Рис 2. 3. Схема двухступенчатого соосного редуктора.
3. Схема двухступенчатого соосного редуктора.
Полученное значение
округляется до стандартного значения.
,
где
—
общее передаточное число редуктора
Рис. 2.4. Схема
двухступенчатого коническо-цилиндрического редуктора.
,
где
—
общее передаточное число редуктора
Полученное значение
округляется до стандартного значения.
Рис. 2.5. Схема червячно-цилиндрического редуктора.
,
где
—
общее передаточное число редуктора.
Примечание:
=8;
12.5; 16; !8; 20; 25; 32.
Рис. 2.6. Схема
цилиндрическо-червячного редуктора.
=2…3.15
=8;
12.5; 16; 18; 20; 25; 32.
Рис. 2.7. Схема двухступенчатого
червячного редуктора
Примечание: Полученное
значение округляется до стандартного значения.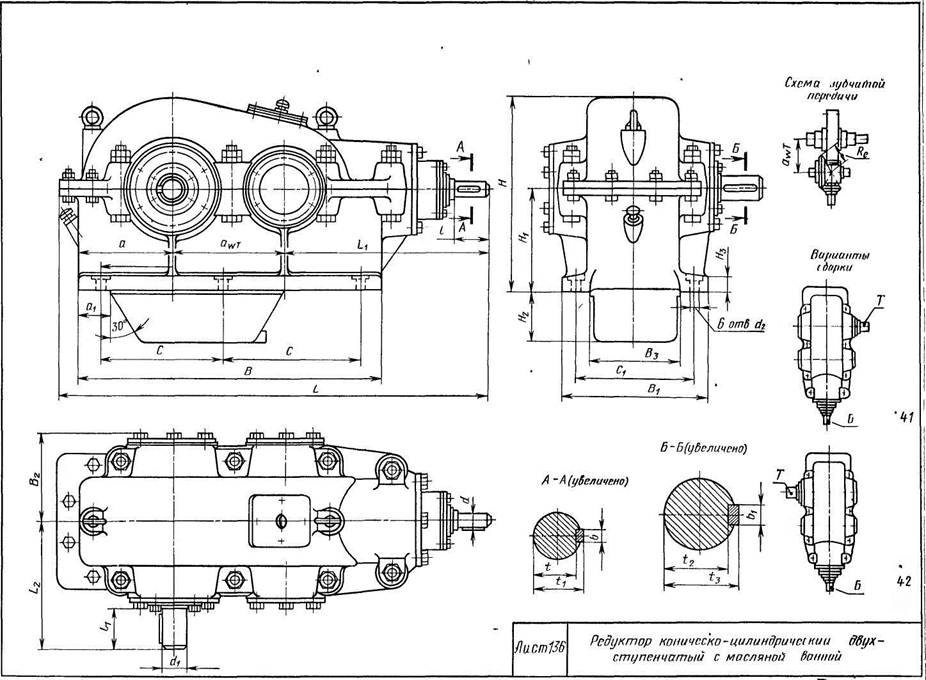
=8;
12.5; 16; 18; 20; 25; 32.
Рис. 2.8. Схема
трехступенчатого цилиндрического редуктора.
;
-передаточное число первой и третьей ступени совместно.
— передаточное число первой ступени.
-передаточное число третьей ступени.
3.
КОЭФФИЦИЕНТЫ ДОЛГОВЕЧНОСТИ
ПО КОНТАКТНЫМ И ИЗГИБНЫМ НАПРЯЖЕНИЯМ ДЛЯ ЦИЛИНДРИЧЕСКИХ, ЗУБЧАТЫХ И КОНИЧЕСКИХ
ПЕРЕДАЧ.
3.1.
При постоянной нагрузке
; ;
Где
—
число циклов нагружения зубьев.
;
Где
–угловая
скорость на ведомом валу w2= π · n230
—
срок службы передачи в часах.
3.2.
При переменных режимах
нагрузки, заданных циклограммой
; ;
Где
—
эквивалентное число нагруженных зубьев
–
базовое число циклов перемен напряжений в зависимости от твердости рабочей
поверхности определяется по Рис. 3.1
3.1
–
базовое число циклов перемен напряжений для всех сталей.
;
Где
—
крутящиймомент, соответствующий i-й ступени
циклограммы напряжения.
—
наибольший расчетный крутящий момент.
–число циклов перемен напряжений за время действия момента Ti.
Скачать файл
Выбери свой ВУЗ
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им.
 Даля 166
Даля 166 - ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им.
 Дегтярева 174
Дегтярева 174 - КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им.
 Макарова 543
Макарова 543 - НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им.
 Герцена 123
Герцена 123 - РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им.
 Гагарина 114
Гагарина 114 - СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им.
 Каразина 305
Каразина 305 - ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Полный список ВУЗов
Кинематические схемы цилиндрических редукторов — Мегаобучалка
Практическая работа №
Исследование зубчатого цилиндрического редуктора.
Цель работы:Ознакомится с конструктивными особенностями и кинематическими схемами редукторов. Научиться выполнять расчет зубчатого цилиндрического редуктора.
Ход работы
Теоретическое обоснование.Редуктором (цилиндрическим) называют механизм, который преобразует высокую угловую скорость вращения входного вала в низкую на выходном валу. При этом крутящий момент на выходном валу возрастает пропорционально уменьшению скорости вращения.
Редуктор (цилиндрический) состоит из корпуса, в котором расположены зубчатые колеса, валы, подшипники валов, системы их смазки и др. Наличие корпуса обеспечивает безопасность, хорошую смазку и, следовательно, высокий КПД, в сравнении, например, с открытыми передачами.
Цилиндрический редуктор – самый распространенный тип редукторов за счет простоты передачи и максимального КПД. Основу редуктора составляют зубчатые передачи – прямозубые цилиндрические или конические или косозубые. Редуктор может состоять из одной или нескольких ступеней. Число ступеней выбирается исходя из требуемого передаточного отношения – чем оно выше, тем большее число ступеней необходимо.
Описание и принцип работы:
Цилиндрический редуктор представляет собой одну или несколько последовательно соединенных цилиндрических передач, заключенных в общий корпус. Редуктор имеет входной и выходной валы, которые посредством муфт или иных соединительных элементов соединяются с двигателем и рабочей машиной соответственно.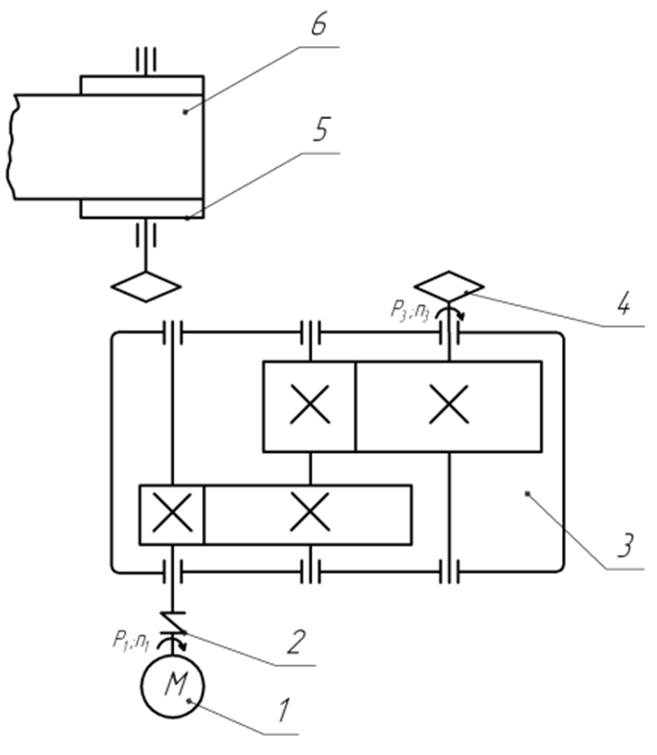 В свою очередь цилиндрическая зубчатая передача представляет собой пару зубчатых колес, находящихся в зацеплении друг с другом.
В свою очередь цилиндрическая зубчатая передача представляет собой пару зубчатых колес, находящихся в зацеплении друг с другом.
Когда к входному валу прикладывается вращающий момент, он, как и закрепленное на нем зубчатое колесо, приводится в движение. Посредством цилиндрической передачи усилие передается от колеса входного вала к колесу, находящемуся с ним в зацеплении. Колеса изготавливаются разных диаметров и с разным количеством зубьев, причем колесо с меньшим числом зубьев называется шестерней, а с большим – колесом. Вращающий момент последовательно передается с входного вала на промежуточный, а с промежуточного на выходной (в случае двухступенчатого редуктора).
Кинематические схемы цилиндрических редукторов
Одноступенчатые горизонтальный редуктор с цилиндрическими прямо- или косозубыми колесами. Передаточное отношение i = 2…6,3. Обеспечивает передачу вращающих моментов (на тихоходном валу) величиной от 250 до 4000 Нм.
Двухступенчатый горизонтальный редуктор с цилиндрическими колесами по развернутой схеме. Диапазон передаточных отношений i = 8…40. Достоинство – небольшая ширина редуктора. Недостаток – нагрузка между подшипниками распределяется неравномерно, создается концентрация нагрузки по дайне зубьев колес.
Двухступенчатый горизонтальный редуктор с раздвоенной быстроходной ступенью. Нагрузка на подшипники распределяется более равномерно, чем в вышеназванном редукторе. Зубчатые колеса раздвоенных ступеней выполняются косозубыми и противоположно направленными винтовыми линиями.
Двухступенчатый горизонтальный редуктор с цилиндрическими колесами по соосной схеме. Передаточное отношение i = 8…50.Достоинство –небольшие габариты по длине. Недостатки – увеличение габаритов по ширине, сложность конструкции.
Трехступенчатый горизонтальный редуктор с цилиндрическими колесами по развернутой схеме. Обеспечивает на тихоходном валу передачу вращающего момента величиной от 1000 до 4000 Нм в диапазоне передаточных отношений i=45. ..200.
..200.
Порядок выполнения работы:
1. Изобразить кинематическую схему редуктора.
2. Определить значение общего числа u:
u =
u = 3,8 3,8 3,8=54,8.
;
;
;
3. Определить частоту вращения вала электродвигателя:
Об/мин;
4. Определить допускаемое контактное напряжение на шестерне:
.
= =1,97.
5. Определить значение крутящего момента на быстроходном валу:
= =834586
6. Определить значение мощности электродвигателя :
10,6 кВт.
1) .
2) Определить отклонение частоты вращения от требуемой
2,9 %.
3) Определить модуль зацепления m:
4) Определить расчетные геометрические параметры всех зубчатых колес:
а) делительный диаметр шестерни ;
б) диаметр вершин зубьев шерстен ;
в) диаметр впадин зубьев шестерни
;
г) делительный диаметр колеса
д) диаметр вершин зубьев колеса
е) диаметр впадин зубьев колеса
ж) межосевое расстояние
Исходные данные
Таблица 1
| № |
Параметры | Обозн | Величина | |||
| Пример расчета | Вариант №1 | Вариант №2 | Вариант №3 | |||
| Срок службы, г | L | |||||
| Частота вращения на выходном валу, об/мин | n1 | |||||
| Число зубьев на 1-ом зубчатом колесе | z1 | |||||
4.
| Число зубьев на 2-ом зубчатом колесе | z2 | ||||
| 5. | Число зубьев на 3-ом зубчатом колесе | z3 | ||||
| Число зубьев на 4-ом зубчатом колесе | z4 | |||||
| Число зубьев на 5-ом зубчатом колесе | z5 | |||||
| Число зубьев на 6-ом зубчатом колесе | z6 | |||||
| Модуль зацепления на первой ступени, мм | m1 | 1,5 | 1,6 | 1,3 | 1,4 | |
| Модуль зацепления во второй ступени, мм | m2 | 1,5 | 1,6 | 1,3 | 1,4 | |
| Модуль зацепления в третьей ступени, мм | m3 | 1,5 | 1,6 | 1,3 | 1,4 | |
| Число часов работы в сутки, ч | t | |||||
| Межосевое расстояние, мм | aw | |||||
| Мощность двигателя, кВт | ||||||
| Диаметр вершин зубьев 1-го колеса, мм | da1 | |||||
| Диаметр вершин зубьев 2-го колеса, мм | da2 |
Контрольные вопросы.
1. Назначение, устройство и классификация редуктора.
2. Чем объясняется преимущественное применение в современных редукторах косозубых и шевронных передач? Какими преимуществами и недостатками характеризуется одинаковое и различное направление зубьев шестерни и колеса на промежуточном валу редуктора?
3. Чем объясняется то, что ширина венца шестерни принимается на 3…5 мм больше ширины венца колеса?
4. Какие способы смазки применяют для редукторов? От чего зависит выбор способа смазки?
5. Какие подшипники используются в редукторах данного типа?
6. Укажите из каких материалов изготовлены составные части редуктора?
Внутреннее устройство коробки передач — Руководство по игре 0
Изменить эту страницу
Переключить боковую панель оглавления
По сути, редуктор — это просто набор шестерен и корпус, который их соединяет. Редукторы имеют выходное передаточное число , конечное передаточное отношение между входным валом двигателя и конечным выходным валом.
Редукторы имеют выходное передаточное число , конечное передаточное отношение между входным валом двигателя и конечным выходным валом.
Клемма
- Редуктор
Также известен как передаточное число. В любой вращательной системе передачи мощности (обычно включающей двигатели и сервоприводы в FTC) передаточное отношение определяет как количество оборотов на входе системы, так и количество оборотов на выходе.
Например, мотор-редуктор NeveRest 20 состоит из немодифицированного мотора NeveRest и планетарного редуктора с передаточным числом 20:1 (или, если говорить, «20 к 1»). Это означает, что для того, чтобы выходной вал редуктора повернулся 1 раз, входной вал двигателя должен повернуться 20 раз. Передаточные числа являются одним из наиболее важных соображений при проектировании компонента силовой передачи.
Любой двигатель или сервопривод FTC имеет два свойства: скорость и крутящий момент (или вращательное усилие). Эти два свойства обратно пропорциональны, что означает, что увеличение скорости уменьшает крутящий момент, и наоборот.
 Например, если кто-то хочет сделать механизм быстрее за счет крутящего момента, удвоив скорость этой коробки передач 20: 1, он уменьшит передаточное отношение в 2 раза. Поскольку 20 разделить на 2 равно 10, новое желаемое соотношение будет 10:1 (это называется ускорением). Однако, если кто-то хочет вместо этого удвоить крутящий момент, сделав систему более мощной и надежной за счет скорости, он должен увеличить передаточное число в 2 раза, оставив передаточное число 40:1 (это называется передаточным числом). вниз).
Например, если кто-то хочет сделать механизм быстрее за счет крутящего момента, удвоив скорость этой коробки передач 20: 1, он уменьшит передаточное отношение в 2 раза. Поскольку 20 разделить на 2 равно 10, новое желаемое соотношение будет 10:1 (это называется ускорением). Однако, если кто-то хочет вместо этого удвоить крутящий момент, сделав систему более мощной и надежной за счет скорости, он должен увеличить передаточное число в 2 раза, оставив передаточное число 40:1 (это называется передаточным числом). вниз).Наиболее распространенными способами повышения или понижения передачи являются редукторы, шестерни, звездочки и шкивы с ременным приводом, все из которых существуют в различных размерах.
В FTC редукторы могут быть более распространены, чем вы думаете — к каждому двигателю прикреплена коробка передач. Эти редукторы относятся к одному из следующих двух типов: цилиндрические или планетарные. Ниже мы даем подробный анализ каждого из этих типов редукторов. Просто для пояснения: нижеприведенные редукторы отделены от базового двигателя.
Просто для пояснения: нижеприведенные редукторы отделены от базового двигателя.
Цилиндрические редукторы
Term
- Цилиндрический редуктор
Цилиндрический редуктор имеет цилиндрические шестерни, которые расположены друг над другом. Редуктор достигается за счет шестерен разного размера в одной плоскости.
Цилиндрические редукторы
представляют собой набор передаточных чисел, часто наложенных друг на друга для достижения большого сложного передаточного числа (например, 40: 1). Каждое отдельное передаточное число имеет только две передачи — одна может быть 8:1, другая может быть 5:1, но конечное передаточное число будет 40:1. Эти редукторы используются в двигателях серии Andymark NeveRest Classic и goBILDA серии 5201, а также в двигателях REV HD Hex. Из-за особенностей конструкции этих коробок передач каждая передача имеет только несколько зубьев от каждой включенной шестерни, и эти зубья несут всю нагрузку коробки передач. Цилиндрический редуктор легко повредить от ударной нагрузки, а при поломке одной шестерни перестанет работать весь редуктор.
Цилиндрический редуктор легко повредить от ударной нагрузки, а при поломке одной шестерни перестанет работать весь редуктор.
Наконечник
Не рекомендуется использовать цилиндрические редукторы в устройствах с высокими нагрузками, таких как трансмиссии или рычаги. Вместо этого используйте планетарные редукторы.
Пример цилиндрического редуктора. Обратите внимание, что все шестерни зацепляются только с одной другой шестерней.
Преимущества цилиндрических редукторов
Как правило, цилиндрические редукторы дешевле планетарных. Однако в FTC это изменение цены часто минимально. Планетарный редуктор 20:1 от REV всего на 4 доллара больше, чем цилиндрический редуктор 20:1
.
Цилиндрические редукторы
от разных производителей не взаимозаменяемы. Однако они сопоставимы и практически неотличимы по производительности. Здесь главное учитывать вашу желаемый редуктор, желаемые соединения двигателя и желаемый тип выходного вала .
Планетарные редукторы
В планетарных редукторах
используется более сложная система зубчатых передач, обеспечивающая надежную передачу в компактном пространстве. В автомобильной технике планетарные редукторы могут достигать нескольких различных передаточных чисел без изменения размера шестерни, но все планетарные редукторы, которые вы увидите в FTC, достигают только одного передаточного отношения.
В автомобильной технике планетарные редукторы могут достигать нескольких различных передаточных чисел без изменения размера шестерни, но все планетарные редукторы, которые вы увидите в FTC, достигают только одного передаточного отношения.
Терминал
- Планетарный редуктор
Планетарная передача состоит из центральной шестерни (солнечной шестерни), вокруг которой вращаются шестерни меньшего размера (планетарные шестерни). Внешний радиус имеет зубчатый венец, который удерживает другие шестерни на месте.
Планетарные редукторы
используются в серии Andymark Orbital, некоторых планетарных и ультрапланетарных двигателях REV HD Hex, а также в широком ассортименте планетарных мотор-редукторов goBILDA. Кроме того, AndyMark продает несколько планетарных коробок передач на вторичном рынке под названием NeveRest Sport и 57 Sport. Как видно из рисунка ниже, на одну ступень зацепляется больше зубьев, чем в цилиндрическом редукторе.
Пример ступени планетарного редуктора. Обратите внимание, как солнечная шестерня входит в зацепление с несколькими шестернями.
Обратите внимание, как солнечная шестерня входит в зацепление с несколькими шестернями.
Преимущества планетарных редукторов
Люфт меньше, чем у аналогов с прямозубым редуктором. Люфт определяется как зазор или потеря движения, вызванные зазорами между деталями. Это легко объяснить, надев колесо или шестерню на вал двигателя и слегка вращая его. Деталь должна иметь возможность немного покачиваться без приложения к ней значительной силы. Это вызвано тем, что зубья шестерни внутри коробки передач не могут идеально сцепляться, и то же самое для цепи и звездочек или любой другой формы передачи мощности. Однако планетарные редукторы имеют меньший люфт, поскольку у них меньше ступеней передач.
Эффективность выше, чем у цилиндрических редукторов. Типичный двухступенчатый цилиндрический редуктор имеет КПД около 85%, тогда как большинство двухступенчатых планетарных редукторов имеют КПД 94%.
Грузоподъемность выше у планетарных редукторов.
 Это связано с тем, что на каждой ступени задействовано несколько зубьев, что распределяет нагрузку.
Это связано с тем, что на каждой ступени задействовано несколько зубьев, что распределяет нагрузку.Наконечник
Это означает, что планетарные редукторы не так легко ломаются при использовании в условиях высоких нагрузок, таких как трансмиссии.
Кинематический анализ систем планетарных передач с использованием блок-схем | Дж. Мех. Дес.
Пропустить пункт назначения навигации
Инновации в дизайне
Ми-Чинг Цай,
Ченг-Чи Хуанг,
Бор-Джен Лин
Информация об авторе и статье
Дж. Мех. Дез . июнь 2010 г., 132(6): 065001 (10 страниц)
https://doi.org/10.1115/1.4001598
Опубликовано в Интернете: 25 мая 2010 г.
История статьи
Получен:
3 августа 2009 г.
Пересмотренный
Просмотры
- Содержание артикула
- Рисунки и таблицы
- Видео
- Аудио
- Дополнительные данные
- Экспертная оценка
Делиться
- Твиттер
- MailTo
Иконка Цитировать
Цитировать
Разрешения
Поиск по сайту
Цитирование
Цай М. , Хуанг С. и Линь Б. (25 мая 2010 г.). «Кинематический анализ систем планетарных передач с использованием блок-схем». КАК Я. Дж. Мех. Дез . июнь 2010 г.; 132(6): 065001. https://doi.org/10.1115/1.4001598
, Хуанг С. и Линь Б. (25 мая 2010 г.). «Кинематический анализ систем планетарных передач с использованием блок-схем». КАК Я. Дж. Мех. Дез . июнь 2010 г.; 132(6): 065001. https://doi.org/10.1115/1.4001598
Скачать файл цитаты:
- Рис (Зотеро)
- Менеджер ссылок
- EasyBib
- Держатели для книг
- Менделей
- Бумаги
- Конечная примечание
- РефВоркс
- Бибтекс
- Процит
- Медларс
панель инструментов поиска
Расширенный поиск
В этой статье используются методы управления для анализа кинематических взаимосвязей с помощью блок-схем для планетарных зубчатых передач. Выявленные уравнения касательной скорости в каждой точке контакта механических зубчатых передач используются для построения блок-схем. Затем используются концепции стратегий обратной связи и прямой связи, чтобы проиллюстрировать функции снижения и увеличения скорости в кинематике с анализом чувствительности. Конструктивное отличие необычных планетарных передач от обычных также объясняется на основе характеристического уравнения стратегий обратной связи для конструктивных ограничений по условиям устойчивости. Планетарная передача с кулачковым управлением дополнительно проиллюстрирована для ограничения и кинематического анализа с использованием метода блок-схемы и характеристического уравнения, и получены расчетные модели для чувствительности и выходного сигнала движения этой планетарной передачи. Благодаря взаимосвязи между управлением и кинематикой эта статья представляет собой руководство для инженеров в различных областях, позволяющее легко понять функцию механического проектирования.
Конструктивное отличие необычных планетарных передач от обычных также объясняется на основе характеристического уравнения стратегий обратной связи для конструктивных ограничений по условиям устойчивости. Планетарная передача с кулачковым управлением дополнительно проиллюстрирована для ограничения и кинематического анализа с использованием метода блок-схемы и характеристического уравнения, и получены расчетные модели для чувствительности и выходного сигнала движения этой планетарной передачи. Благодаря взаимосвязи между управлением и кинематикой эта статья представляет собой руководство для инженеров в различных областях, позволяющее легко понять функцию механического проектирования.
Раздел выпуска:
Инновационный дизайн
Ключевые слова:
графы потоков данных,
инженерное проектирование,
Обратная связь,
прямая связь,
шестерни,
кинематика,
график потока сигналов,
блок-схема,
планетарная передача,
планетарная передача,
кулачковый,
кинематический,
Обратная связь,
прямая связь,
характеристическое уравнение,
планетарная передача с кулачковым управлением
Темы:
Планетарные передачи,
Обратная связь,
Кинематика,
Шестерни,
Упреждающее управление,
Передаточные функции,
Кинематический анализ
1.
Liu
,
YH
, 2004, «
Планетарный дифференциал
», патент США № 6, 777.
2.
Армингтон
,
S. F.
, 1960, «
Составной планетарный редуктор
», патент США № 2,941,423.
3.
Hsieh
,
W. H.
, 2007, «
Экспериментальное исследование планетарных зубчатых передач с кулачковым управлением
»,
4 Mech. Мах. Теория
0094-114X,
42
, стр.
513
–
525
.
4.
Mason
,
SJ
, 1953, «
Теория обратной связи: некоторые свойства графиков потока сигналов
»,
Proc. ИРЭ
ИРЭ
0096-8390,
41
, стр.
1144
–
1156
.
5.
Wojnarowski
,
J.
и
Lidwin
,
A.
, 1975, «
Применение графиков потока сигнала — Kinematic Analysis of Planetary Gear Train
»,
Мех. Мах. Теория
0094-114X,
10
(
1
), стр.
17
–
9.0003 31
6.
Wojnarowski
,
J.
, 1976, «
Графовый метод определения нагрузок в сложных зубчатых передачах
»,
4 ,
4 . Мах. Теория
Мах. Теория
0094-114X,
11
, стр.
103
–
121
.
7.
Pennestrì
,
E.
и
Freudenstein
,
F.
, 1993, «
Систематический подход к мощности и STATAC Цилиндрические зубчатые передачи
”,
ASME J. Mech. Дес.
0161-8458,
115
, стр.
639
–
644
.
8.
MA
,
R.
и
Gupta
,
K. C.
C.
, 1994, «
Графики потока сигналов для поездов для пространственных передач
»,
Asme J. мех. Дес.
0161-8458,
116
, стр.
326
–
331
.
9.
Uematsu
,
S.
, 1997, “
Применение теории графов к кинематическому анализу планетарных передач
»,
J. Jpn. соц. Точный англ.
0374-3543,
31
(
2
), стр.
141
–
026
04
10.
HSU
,
C. H.
H.
и
LAM
,
K. T.
, 1992, «
.
»,
ASME J. Мех. Дес.
0161-8458,
114
, стр.
196
–
200
.
11.
HSIEH
,
H. I.
и
TSAI
,
L. W.
, 1996, «
Кинематический анализ Epicyclic -type Mechanismess, использующий концепцию Enterity Enterity Enterties.
»,
ASME J. Mech. Дес.
0161-8458,
118
, стр.
294
–
299
.
12.
Nelson
,
C. A.
и
Cipra
,
R. J.
, 2005, «
Упрощенный кинематический анализ Bevel Epicycic Gear gear с помощью Power-Flow и эффективности к Power-Flo Анализы
»,
ASME J. Mech. Дес.
0161-8458,
127
, стр.
278
–
286
.
13.
Wojnarowski
,
J.
,
Kopec
,
J.
и
Zawislak
,
S.
, «
9
,
S.
», «
9
,
S. ,
, 2006, 20064, 2004,
,
S. ,
, 2006,
9
,
S. ,
, 2006,
,
S. ,
, 20064
,
и
. и графики
»,
Journal of Theoretical and Applied Mechanics
1429-2955,
44
(
1
), стр.
139
–
162
; см. http://www.ptmts.org.pl/jtam.htmlhttp://www.ptmts.org.pl/jtam.html.
14.
Chesmond
,
C. J.
, 1984,
Технология системы управления
,
Эдвард Арнольд
,
Лондон
.
15.
Куо
,
Б.К.
, 1991,
Системы автоматического управления
, 6-е изд.,
Prentice-Hall
,
Englewood Cliffs, NJ
.
16.
Phillips
,
C. L.
и
Harbour
,
R. D.
, 1991,
Системы управления обратной связью
, 2ndd Ed.,
. ,
Энглвуд Клиффс, Нью-Джерси
.
17.
Склейтер
,
N.
и
Chironis
,
N. P.
, 1991,
Механизмы и механические устройства.
172
.
18.
Hopgood
,
A. A.
, 2001,
Интеллектуальные системы для инженеров и ученых
,
4 C
0004
Бока-Ратон, Флорида
, стр.
410
–
412
.
19.
Wilson
,
C. E.
,
Sadler
,
J. P.
, and
Michels
,
W.
